20
BAB III
PERANCANGAN DAN PEMBUATAN SISTEM
Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, dengan software yang akan digunakan untuk mendukung keseluruhan sistem yang akan di ujikan. Software sendiri adalah bagian yang saling terhubung dalam sistem, dan software nanti akan di jadikan sebagai perantara antara komputer dengan hardware.
3.1 Desain Sistem
Pada tahap ini yang dilakukan adalah membuat perancangan dan pembuatan sistem yaitu membuat diagram blok sistem, menentukan dan menyusun algoritma untuk perancangan perangkat lunak.
Gambar 3.1 Diagram blok sistem monitor dan kontrol
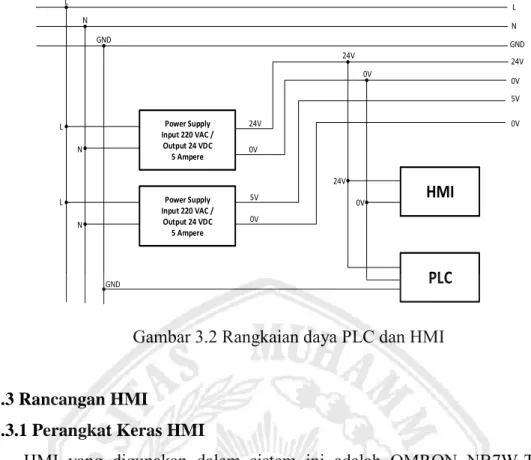
3.2 Rancangan Rangkaian Daya pada PLC dan HMI
Rangkaian membutuhkan power supply untuk mengaktifkan sistem. Tegangan masukan yang dibutuhkan adalah 220 VAC. PLC dan HMI membutuhkan tegangan 24 Volt. Power Supply PLC Relay Perangkat Keras HMI Bluetooth Module Android Y Y
21 Gambar 3.2 Rangkaian daya PLC dan HMI
3.3 Rancangan HMI
3.3.1 Perangkat Keras HMI
HMI yang digunakan dalam sistem ini adalah OMRON NB7W-TW00B. Power supply 24 VDC. PC dihubungkan ke HMI dengan menggunakan USB slave terminal.HMI dihubungkan ke PLC dengan menggunakan kabel RS232 9 pin.
Gambar 3.3 HMI Omron NB7W-TW00B
L N GND 24V 0V 5V 0V L L L HMI PLC Power Supply Input 220 VAC / Output 24 VDC 5 Ampere Power Supply Input 220 VAC / Output 24 VDC 5 Ampere 24V 0V 24V 0V 5V 0V N GND N GND N 24V 0V
22 Gambar 3.4 Hubungan HMI dengan PLC dan PC
3.3.2 Rancangan Layout HMI
Pada perancangan layout HMI ini terdapat 3 pilihan menu utama dan 1 buah tombol emergency yaitu:
a. Kopi coklat, yaitu fasilitas yang disediakan kepada operator untuk menjalankan mesin secara otomatis dalam pembuatan kopi coklat.
b. Kopi susu, yaitu fasilitas yang disediakan kepada operator untuk menjalankan mesin secara otomatis dalam pembuatan kopi susu.
c. Kopi murni, yaitu fasilitas yang disediakan kepada operator untuk menjalankan mesin secara otomatis dalam pembuatan kopi murni.
d. Tombol emergency, yaitu fasilitas yang disediakan kepada operator untuk memberhentikan proses apabila terjadi kesalahan pada sistem tersebut.
Pada menu ini tampilan layar menunjukkan beberapa kondisi yang sedang terjadi selama proses berlangsung. Dan juga disediakan beberapa tambahan fitur untuk mempermudah operator melakukan pemeriksaan. Misalnya tentang valve membuka atau menutup, conveyor berjalan atau berhenti dan proses penyeduhannya.
Data RS232 Cable Power Supply
Programming USB Slave Cable
23 Gambar 3.5 Layout process HMI
3.4 Perancangan Wiring pada PLC
Sebelum pemrograman dilakukan hal terpenting yang dilakukan adalah pengalamatan dan merancang alamat mana yang akan dipakai pada PLC. Alamat yang dipersiapkan meliputi input PLC dan output PLC. PLC yang digunakan adalah PLC Omron CPM2A-60CDR-A dengan 36 input dan 24 output. Input yang digunakan mempunyai alamat 0000 – 0011, 0100 – 0111, 0200 – 0211. Sedangkan output yang digunakan adalah 1000 – 1007, 1100 – 1107, 1200 – 1207.
3.4.1 Melakukan Pemrograman PLC
Memprogram PLC adalah hal yang sangat penting untuk bisa menjalankan hardware dengan otomatis. Software yang digunakan untuk membuat program ini adalah CX-Programmer. Langkah awal yang harus dilakukan apabila software ini belum terinstal di PC adalah install terlebih dahulu dengan mengikuti petunjuk-petunjuk yang sudah ada. Setelah semuanya siap untuk dijalankan maka CX-Programmer siap untuk digunakan. Cara membuat program menggunakan CX-Programmer sebagai berikut:
24 a. Hidupkan PLC Omron CPM2A, dengan menyambungkan kabel power
sampai indikator lampu PWR pada PLC menyala.
b. Hubungkan PLC Omron CPM2A dengan PC menggunakan kabel RS232 dengan memakai kabel konverter USB.
c. Buka software untuk membuat program yaitu CX-Programmer.
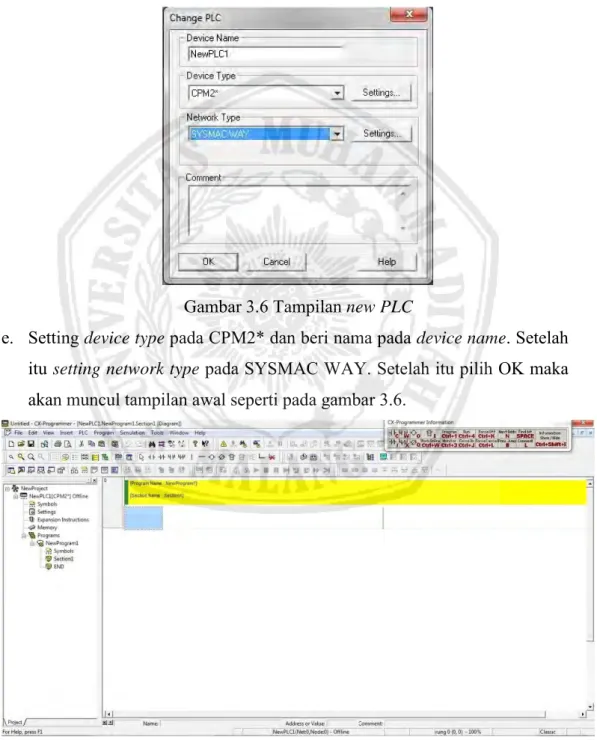
d. Pilih new untuk membuat program baru atau klik pada taskbar file kemudian new maka akan muncul seperti gambar 3.5.
Gambar 3.6 Tampilan new PLC
e. Setting device type pada CPM2* dan beri nama pada device name. Setelah itu setting network type pada SYSMAC WAY. Setelah itu pilih OK maka akan muncul tampilan awal seperti pada gambar 3.6.
25
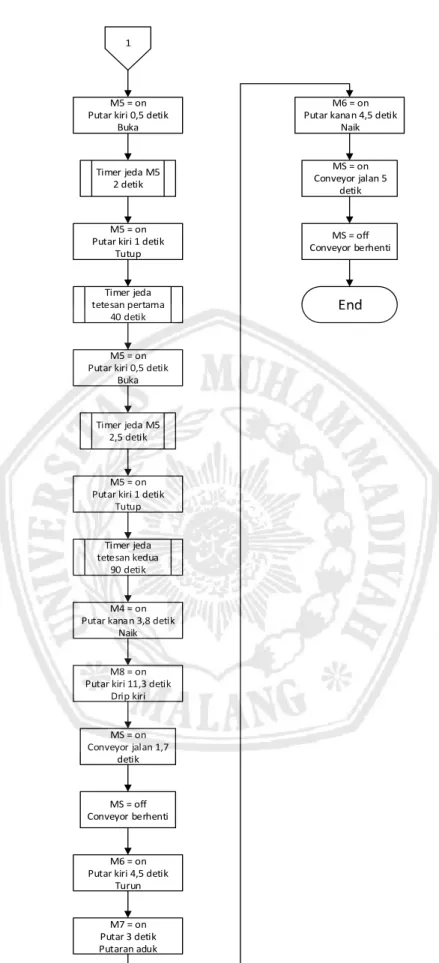
3.5 Desain Flowchart Kopi Vietnam Drip
Start Power Tombol Coklat Tombol Susu Tombol Kopi MS = on Conveyor jalan MS = on Conveyor jalan MS = on Conveyor jalan Limit Switch = on MS = off Conveyor berhenti Timer LS 5 Detik Timer LS 5 Detik Timer LS 5 Detik M1 = on Putar kiri 1 detik
Buka
Timer jeda coklat 12 detik
M1 = on Putar kanan 0,8 detik
Tutup MS = on Conveyor jalan 5,6 detik MS = off Conveyor berhenti Limit Switch = on Limit Switch = on MS = off Conveyor berhenti MS = off Conveyor berhenti MS = on Conveyor jalan 2,5 detik MS = off Conveyor berhenti M2 = on Putar kiri 1 detik
Buka
Timer jeda coklat 12 detik
M2 = on Putar kanan 1 detik
Tutup MS = on Conveyor jalan 4,1 detik MS = off Conveyor berhenti MS = on Conveyor jalan 5,6 detik MS = off Conveyor berhenti M3 = on Putar kiri 1 detik
Buka
Timer jeda coklat 3 detik
M3 = on Putar kanan 0,9 detik
Tutup M8 = on Putar kanan 11,3 detik
Drip kanan M4 = on Putar kiri 3,8 detik
Turun
26
M5 = on Putar kiri 0,5 detik
Buka
Timer jeda M5 2 detik
M5 = on Putar kiri 1 detik
Tutup
Timer jeda tetesan pertama
40 detik
M5 = on Putar kiri 0,5 detik
Buka
Timer jeda M5 2,5 detik
M5 = on Putar kiri 1 detik
Tutup
Timer jeda tetesan kedua
90 detik
M4 = on Putar kanan 3,8 detik
Naik
M8 = on Putar kiri 11,3 detik
Drip kiri MS = on Conveyor jalan 1,7 detik MS = off Conveyor berhenti M6 = on Putar kiri 4,5 detik
Turun
M7 = on Putar 3 detik Putaran aduk
M6 = on Putar kanan 4,5 detik
Naik MS = on Conveyor jalan 5 detik MS = off Conveyor berhenti End 1
27
33 Gambar 3.9 Ladder diagram proses Kopi Vietnam Drip
34
3.7 Desain Software Monitoring Bahan Kopi Vietnam Drip dengan Bluetooth
Desain program monitoring dengan bluetooth ini memiliki kaitan dengan aplikasi pada smartphone android untuk saling berkomunikasi, maka diperlukan program mikrokontroler. Fungsi utama program mikrokontroler adalah sebagai driver alat yang akan dimonitor. Program ini dibuat dengan menggunakan bahasa C++ dengan beberapa fitur diantaranya adalah :
1. Sisa kopi (%) 2. Sisa coklat (%) 3. Sisa susu (%) 4. Temperatur air(°C)
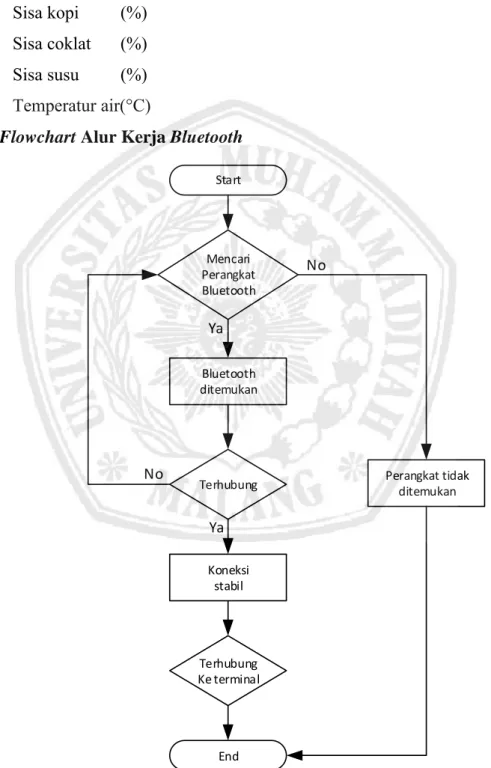
3.7.1 Flowchart Alur Kerja Bluetooth
Gambar 3.10 Flowchart alur kerja bluetooth Start Mencari Perangkat Bluetooth Bluetooth ditemukan Terhubung Koneksi stabil Terhubung Ke terminal End Perangkat tidak ditemukan No No Ya Ya
35
3.7.2 Flowchart Monitor Bahan Kopi Vietnam Drip
Start Mencari Perangkat Bluetooth Bluetooth ditemukan Terhubung Koneksi stabil Terhubung Ke terminal End Perangkat tidak ditemukan No No Ya Ya
Sisa kopi (%) Sisa coklat (%) Sisa susu (%) Temperatur air (° C)
36
3.7.3 Desain Script Program Mikrokontroler
#include <OneWire.h> #include <DallasTemperature.h> #define trigPin1 3 #define echoPin1 2 #define trigPin2 4 #define echoPin2 5 #define trigPin3 6 #define echoPin3 7
long duration, distance, RightSensor,BackSensor,FrontSensor,LeftSensor; OneWire ourWire(8); //Se establece el pin 2 como bus OneWire DallasTemperature sensors(&ourWire); void setup() { delay(1000); Serial.begin (9600); sensors.begin(); Serial.begin (9600); pinMode(trigPin1, OUTPUT); pinMode(echoPin1, INPUT); pinMode(trigPin2, OUTPUT); pinMode(echoPin2, INPUT); pinMode(trigPin3, OUTPUT); pinMode(echoPin3, INPUT); } void loop() { SonarSensor(trigPin1, echoPin1); RightSensor = distance; SonarSensor(trigPin2, echoPin2); LeftSensor = distance; SonarSensor(trigPin3, echoPin3); FrontSensor = distance;
37 sensors.requestTemperatures(); //Se envía el comando para leer la temperatura float temp= sensors.getTempCByIndex(0);
Serial.print("Temperatur : "); Serial.print(temp); Serial.println(" *C "); //delay(100); /*Serial.print(LeftSensor); Serial.print(" ==== "); Serial.print(FrontSensor); Serial.print(" ==== "); Serial.println(RightSensor); */ int a=map(LeftSensor,5,16,100,0); Serial.print("Sisa Susu : "); Serial.print (a); Serial.println(" % "); int b=map(FrontSensor,5,16,100,0); Serial.print("Sisa Coklat : "); Serial.print (b); Serial.println(" % "); int c=map(RightSensor,5,16,100,0); Serial.print("Sisa Kopi : "); Serial.print (c); Serial.println(" % "); Serial.println(" "); Serial.println(" "); delay (2000); }
void SonarSensor(int trigPin,int echoPin) {
digitalWrite(trigPin, LOW); delayMicroseconds(2);
38 digitalWrite(trigPin, HIGH);
delayMicroseconds(10); digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); distance = (duration/2) / 29.1;