3
BAB II
DASAR TEORI
Pada bab ini akan dibahas tentang teori-teori yang berkaitan dengan tugas akhir yang dibuat yaitu tentang sensor rotary encoder, rangkaian optocoupler yang digunakan, Modul SD Card Read Write, Modul DS3231, Transformator CT dan Arduino UNO.
2.1. OMRON E6B2-CWZ6C
Omron E6B2-CWZ6C merupakan sebuah rotary encoder keluaran dari omron. Omron E6B2-CWZ6C ini memiliki kemampuan untuk bekerja di lingkungan kerja pabrik yang memiliki gangguan berupa getaran dan goncangan yang cukup besar. Cara kerja dari Omron E6B2-CWZ6C sama seperti rotary encoder pada umumnya yaitu mengukur perputaran. Omron E6B2-CWZ6C digunakan dalam skripsi ini karena rotary encoder yang telah terpasang di mesin forming PT. Kepuh Kencana Arum adalah Omron E6B2-CWZ6C.
2.1.1. Spesifikasi Omron E6B2-CWZ6C
Omron E6B2-CWZ6C adalah sebuah sensor rotary encoder yang memiliki model output NPN Open-collector. Omron E6B2-CWZ6C memiliki 6 buah konektor berupa kabel. Berikut adalah sambungan dari kabel-kabel Omron E6B2-CWZ6C.
Tabel 2.1 Pengkabelan Omron E6B2-CWZ6C
Warna Sambungan
Coklat Catu daya 5 Volt sampai 24 Volt
Biru 0 Volt atau Ground
Shield (tanpa selubung kabel) Ground
Hitam Output A
Putih Output B
4
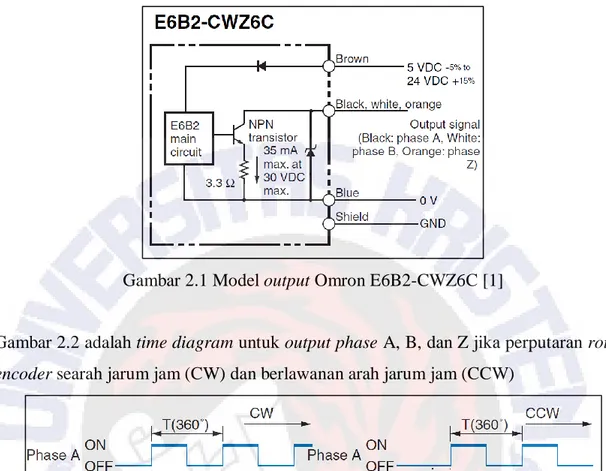
Model dari rangkaian dalam Omron E6B2-CWZ6C dapat dilihat seperti gambar 2.1
Gambar 2.1 Model output Omron E6B2-CWZ6C [1]
Gambar 2.2 adalah time diagram untuk output phase A, B, dan Z jika perputaran rotary encoder searah jarum jam (CW) dan berlawanan arah jarum jam (CCW)
Gambar 2.2 Time diagram output phase A dan phase B [1]
Phase A memiliki frekuensi lebih cepat 1/4 T dengan ralat 1/8 T dibanding phase B saat CW. Sebaliknya saat CCW phase B lebih cepat 1/4 T dengan ralat 1/8 T dibanding phase A. Untuk ukuran dan dimensi dari rotary encoder Omron E6B2-CWZ6C dapat dilihat di gambar 2.3
5
Tabel 2.2 Spesifikasi Omron E6B2-CWZ6C [1]
Indeks Spesifikasi
Tegangan Catu Daya 5 VDC -5% sampai 24 VDC +15%, ripple (p-p): 5%
Konsumsi Arus Maksimal 80 mA
Resolusi (P/R) 360
Output Phase Phase A, B dan Z
Selisih antara output
phase 90°±45° antara A dan B (1/4 T ± 1/8 T)
Konfigurasi output NPN open-collector
Kapasitas output Maksimal 30 VDC, Arus residu maksimal 0.4V (pada kondisi arus sink maksimal 35 mA, tegangan sink 35mA). Respon frekuensi
maksimal 100 kHz
Waktu rise dan fall dari
output 1 μs
Torsi awal Maksimal 0.989 mNm
Momen inersia 1×10-6 kgm2 max
Beban poros radial 30N
Beban poros linear 20N
Kecepatan maksimal 6000 rpm
Pengaman rangkaian Pengaman reverse polaritycircuitpower supply beban , pengaman short-Temperatur lingkungan Saat bekerja : -10 sampai 70 °C; saat disimpan : -25 sampai 80 °C
Kelembaban lingkungan 35% sampai 85%
Daya dielektrik 500 VAC; 50/60 Hz
Daya tahan terhadap
getaran 10 to 500 Hz, 150 m/s
2 atau 2-mm Daya tahan terhadap
goncangan 1,000m/s
2
2.1.2. Struktur dan Cara Kerja Rotary Encoder
Rotary encoder adalah sensor yang tersusun dari sebuah piringan tipis yang memiliki lubang-lubang pada bagian lingkaran piringan. LED atau laser ditempatkan pada salah satu sisi dari piringan yang menyebabkan cahaya menuju ke piringan. Di sisi lain suatu photo-transistor diletakkan sebagai pendeteksi cahaya sehingga photo-transistor dapat mendeteksi cahaya dari LED atau laser yang diterima.
6
Piringan tipis dikopel dengan poros motor, atau media yang ingin kita ketahui posisinya, sehingga jika motor berputar piringan juga ikut berputar. Apabila posisi piringan tepat dan cahaya dari LED atau laser dapat mencapai photo-transistor melalui lubang-lubang yang ada, maka kondisi dari photo-transistor akan saturasi dan menghasilkan pulsa gelombang kotak. Banyaknya pulsa yang dihasilkan dalam satu putaran akan menentukan akurasi dari rotay encoder. Jika pulsa dihasilkan akan memberi nilai high dan bila pulsa tidak dihasilkan akan memberi nilai low . Nilai high dan low bergantung pada catu daya yang diberikan, bila dicatu dengan tegangan 5 Volt maka nilai high akan bertegangan 5 Volt dan low 0 Volt.
Gambar 2.4 Ilustrasi piringan rotary encoder [5]
2.2. Arduino UNO
Arduino Uno adalah papan sirkuit berbasis mikrokontroler ATmega328. IC (integrated circuit) ini memiliki 14 input/output digital (6 output untuk PWM), 6 analog input, resonator kristal keramik 16 MHz, Koneksi USB, soket adaptor, pin header ICSP, dan tombol reset. Hal inilah yang dibutuhkan untuk mensupport mikrokontrol secara mudah terhubung dengan kabel power USB atau kabel power supply adaptor AC ke DC atau juga battery. Bahasa "UNO" berasal dari bahasa Italia yang artinya SATU, ditandai dengan peluncuran pertama Arduino 1.0, Uno pada versi 1.0 sebagai referensi untuk Arduino yang selanjutnya, seri Uno versi terbaru dilengkapi USB.
7
Gambar 2.5 Arduino UNO [2]
2.2.1. Spesifikasi Arduino UNO
Arduino yang digunakan pada skripsi ini adalah Arduino UNO. Arduino UNO digunakan karena mamiliki jumlah pin yang cukup dan memiliki memori yang sesuai untuk menyimpan dan menjalankan program yang dibutuhkan untuk skripsi ini. Berikut merupakan table spesifikasi dari Arduino UNO.
Tabel 2.3 Spesifikasi ArduinoUNO[2]
Mikrokontroler ATmega328
Tegangan Operasi 5V
Input Voltage (disarankan) 7-12V Input Voltage (limit) 6-20V
Pin Digital I/O 14 (6pin digunakan sebagai output PWM)
Pin Input Analog 6
Arus DC per pin I/O 40 mA Arus DC untuk pin 3.3V 50 mA
Flash Memory 32KB (0,5 KB digunakan untuk bootloader)
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
2.2.2. Interupsi Arduino
Interupsi pada Arduino memiliki pengertian bila pada pin interupsi yang sudah diprogram terpicu karena sinyal maka Arduino dengan segera menjalankan program
8
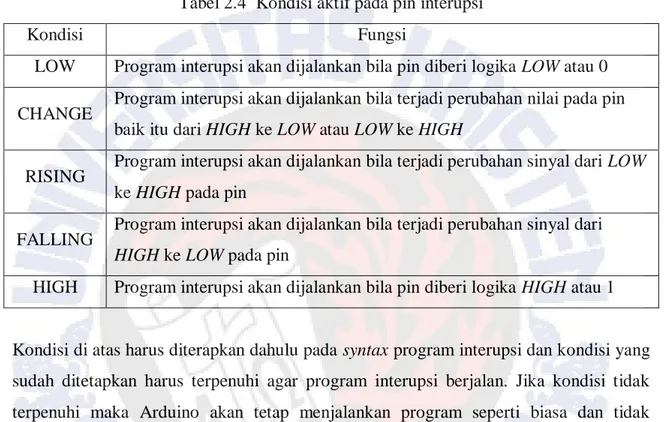
interupsi yang telah diprogram dan menghentikan sejenak program yang sedang berjalan. Pada Arduino UNO memiliki perintah khusus untuk interupsi di dalam program yaitu dengan syntax attachInterrupt(interrupt, ISR, mode). Arduino UNO memiliki 2 buah pin interrupt yang tersedia yaitu pada pin digital 2 dan pin digital 3. Untuk mengatur kondisi pada pin agar dapat aktif yaitu dengan cara mengisi syntax mode dengan beberapa kondisi. Berikut adalah table kondisi untuk pin interrupt
Tabel 2.4 Kondisi aktif pada pin interupsi
Kondisi Fungsi
LOW Program interupsi akan dijalankan bila pin diberi logika LOW atau 0 CHANGE Program interupsi akan dijalankan bila terjadi perubahan nilai pada pin
baik itu dari HIGH ke LOW atau LOW ke HIGH
RISING Program interupsi akan dijalankan bila terjadi perubahan sinyal dari LOW ke HIGH pada pin
FALLING Program interupsi akan dijalankan bila terjadi perubahan sinyal dari HIGH ke LOW pada pin
HIGH Program interupsi akan dijalankan bila pin diberi logika HIGH atau 1
Kondisi di atas harus diterapkan dahulu pada syntax program interupsi dan kondisi yang sudah ditetapkan harus terpenuhi agar program interupsi berjalan. Jika kondisi tidak terpenuhi maka Arduino akan tetap menjalankan program seperti biasa dan tidak menjalankan program interupsi yang sudah dibuat.
2.3. Optocopler
Optocoupler adalah komponen elektronika yang berfungsi sebagai penghubung berdasarkan cahaya optic[9]. Pada prinsipnya, Optocoupler dengan kombinasi LED-Phototransistor adalah Optocoupler yang terdiri dari sebuah komponen LED (Light Emitting Diode) yang memancarkan cahaya infra merah (IR LED) dan sebuah komponen semikonduktor yang peka terhadap cahaya (Phototransistor) sebagai bagian yang digunakan untuk mendeteksi cahaya infra merah yang dipancarkan oleh IR LED.
9
Gambar 2.6 Optocoupler[9]
Optocoupler digunakan karena terdapat perbedaan tegangan pada keluaran dari rotary encoder dimana menggunakan sumber daya 24V dari PLC yang kemudian di baca oleh pin input Arduino dimana maksimal tegangan masukan Arduino adalah 5V.
2.4. Saklar (Push Button)
Saklar atau Switch merupakan sebuah perangkat untuk menghubungkan maupun memutuskan arus beban, saklar terdiri dari dua bilah logam yang menempel pada suatu rangkaian dan dapat terhubung atau terpisah sesuai dengan keadaan sambung (on) atau putus (off)[9]. Pada tugas akhir ini yang digunakan adalah Saklar Push Button yang merupakan kontak sesaat ketika ditekan. Dengan tipe Normally Open (NO), tombol ini disebut juga dengan tombol start karena kontak akan menutup bila ditekan dan kembali terbuka bila dilepaskan. Bila tombol ditekan maka kontak bergerak akan menyentuh kontak tetap sehingga arus listrik akan mengalir.
Gambar 2.7 Sistem kerja Switch (Push button)[9] 2.5. Limit Switch
Limit switch (saklar pembatas) adalah saklar atau perangkat elektromekanis yang mempunyai tuas aktuator sebagai pengubah posisi kontak terminal (dari Normally Open ke Normally Close atau sebaliknya dari Normally Close ke Normally Open). Posisi
10
kontak akan berubah ketika tuas aktuator tersebut terdorong atau tertekan oleh suatu objek. Sama halnya dengan saklar pada umumnya, limit switch juga hanya mempunyai dua kondisi, yaitu menghubungkan atau memutuskan aliran arus listrik. Dengan kata lain hanya mempunyai kondisi ON atau Off.
Namun sistem kerja limit switch berbeda dengan saklar pada umumnya, jika pada saklar umumnya sistem kerjanya akan diatur/ dikontrol secara manual oleh manusia (baik diputar atau ditekan). Sedangkan limit switch dibuat dengan sistem kerja yang berbeda, limit switch dibuat dengan sistem kerja yang dikontrol oleh dorongan atau tekanan (kontak fisik) dari gerakan suatu objek pada aktuator, sistem kerja ini bertujuan untuk membatasi gerakan ataupun mengendalikan suatu objek/mesin tersebut, dengan cara memutuskan atau menghubungkan aliran listrik yang melalui terminal kontaknya.
Gambar 2.8 Sistem kerja Limit Switch[9]
2.6. Modul SD CardRead Write Arduino
Modul SD Card Read Write adalah modul pembaca SD Card melalui sistem file dan driver antarmuka SPI. Modul ini dapat digunakan untuk menulis dan membaca file pada MicroSD. Fitur-fitur dari modul ini adalah sebagai berikut
Support Micro SD dan Micro SDHC
Dapat disuplai tegangan dari 3.3 Volt sampai 5 Volt Modul memiliki regulator 3,3 Volt
Menggunakan komunikasi antarmuka SPI standar
11
Gambar 2.9 Modul SD Card Read Write [10] 2.7. Modul Real Time Clock DS3231
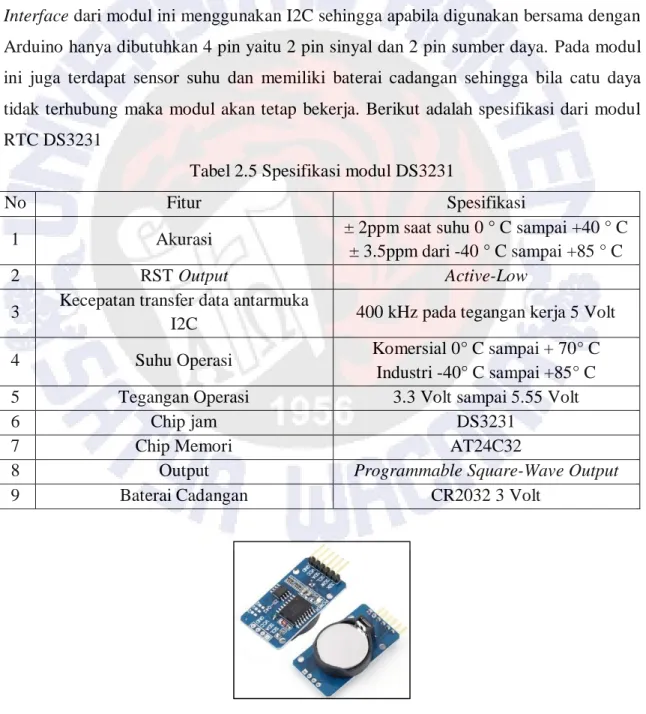
Modul RTC DS3231 adalah modul yang berfungsi sebagai penunjuk waktu. Interface dari modul ini menggunakan I2C sehingga apabila digunakan bersama dengan Arduino hanya dibutuhkan 4 pin yaitu 2 pin sinyal dan 2 pin sumber daya. Pada modul ini juga terdapat sensor suhu dan memiliki baterai cadangan sehingga bila catu daya tidak terhubung maka modul akan tetap bekerja. Berikut adalah spesifikasi dari modul RTC DS3231
Tabel 2.5 Spesifikasi modul DS3231
No Fitur Spesifikasi
1 Akurasi ± 2ppm saat suhu 0 ° C sampai +40 ° C
± 3.5ppm dari -40 ° C sampai +85 ° C
2 RST Output Active-Low
3 Kecepatan transfer data antarmuka
I2C 400 kHz pada tegangan kerja 5 Volt
4 Suhu Operasi Komersial 0° C sampai + 70° C
Industri -40° C sampai +85° C
5 Tegangan Operasi 3.3 Volt sampai 5.55 Volt
6 Chip jam DS3231
7 Chip Memori AT24C32
8 Output Programmable Square-Wave Output
9 Baterai Cadangan CR2032 3 Volt
12 2.8. Transformator CT
Transformator atau sering disingkat dengan istilah Trafo adalah suatu alat listrik yang dapat mengubah taraf suatu tegangan AC ke taraf yang lain. Maksud dari pengubahan taraf tersebut diantaranya seperti menurunkan Tegangan AC dari 220VAC ke 12 VAC ataupun menaikkan Tegangan dari 110VAC ke 220 VAC.
Gambar 2.11 Gulungan dari trafo CT [13]
Transformator yang sederhana pada dasarnya terdiri dari 2 lilitan atau kumparan kawat yang terisolasi yaitu kumparan primer dan kumparan sekunder. Pada kebanyakan Transformator, kumparan kawat terisolasi ini dililitkan pada sebuah besi yang dinamakan dengan Inti Besi (Core). Ketika kumparan primer dialiri arus AC (bolak-balik) maka akan menimbulkan medan magnet atau fluks magnetik disekitarnya.

![Tabel 2.2 Spesifikasi Omron E6B2-CWZ6C [1]](https://thumb-ap.123doks.com/thumbv2/123dok/3094212.2328274/3.893.139.785.140.935/tabel-spesifikasi-omron-e-b-cwz-c.webp)
![Gambar 2.4 Ilustrasi piringan rotary encoder [5]](https://thumb-ap.123doks.com/thumbv2/123dok/3094212.2328274/4.893.148.789.371.877/gambar-ilustrasi-piringan-rotary-encoder.webp)
![Tabel 2.3 Spesifikasi Arduino UNO [2]](https://thumb-ap.123doks.com/thumbv2/123dok/3094212.2328274/5.893.150.772.512.1014/tabel-spesifikasi-arduino-uno.webp)
![Gambar 2.7 Sistem kerja Switch (Push button)[9]](https://thumb-ap.123doks.com/thumbv2/123dok/3094212.2328274/7.893.167.726.748.937/gambar-sistem-kerja-switch-push-button.webp)
![Gambar 2.8 Sistem kerja Limit Switch[9]](https://thumb-ap.123doks.com/thumbv2/123dok/3094212.2328274/8.893.147.764.458.829/gambar-sistem-kerja-limit-switch.webp)
![Gambar 2.11 Gulungan dari trafo CT [13]](https://thumb-ap.123doks.com/thumbv2/123dok/3094212.2328274/10.893.157.734.326.560/gambar-gulungan-dari-trafo-ct.webp)