TUGAS AKHIR
LAMPU PANGGUNG TERKENDALI MUSIK BERBASIS
RASPBERRY PI
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
YULIA MURWANI MULYANINGRATI NIM : 095114014
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
STAGE LIGHTING CONTROLLED BY MUSIC BASED ON
RASPBERRY PI
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
YULIA MURWANI MULYANINGRATI NIM : 095114014
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
Meretas Keterbatasan dalam Kesederhanaan
Skripsi ini kupersembahkan untuk…
Tuhan Yesus Kristus Gembalaku
Keluargaku tercinta
Sahabatku tersayang
Seluruh teman-teman Teknik Elektro Universitas Sanata Dharma
viii
INTISARI
Tata cahaya berupa lampu panggung dapat memberikan kesan visual yang menarik. Lampu panggung dapat menambah penegasan ekspresi suatu pertunjukan seni. Musik merupakan satu dari komponen pertunjukan seni yang dapat mempengaruhi emosi penonton. Tata cahaya yang diselaraskan dengan musik dapat meningkatkan ekspresi suatu pertunjukan seni. Penelitian ini memberikan inovasi dalam menyelaraskan penyalaan lampu panggung dengan musik.
Lampu panggung terkendali musik menggunakan Raspberry Pi sebagai pusat pengendalian sistem. File musik diberikan sebagai masukan Raspberry Pi. Raspberry Pi mengolah masukan menggunakan pendeteksian nada dan pendeteksian tempo. Hasil pendeteksian nada menentukan penyalaan beserta variasi warna lampu panggung. Hasil pendeteksian tempo digunakan untuk menentukan terang redup lampu.
Sistem lampu panggung terkendali musik berbasis Raspberry Pi berhasil memberikan variasi penyalaan lampu panggung sesuai musik. Sistem mampu membedakan nada dan tempo yang diberikan. Lampu panggung dapat memberikan variasi warna sesuai dengan variasi nada dan memberikan durasi penyalaan dengan rata-rata galat durasi penyalaan sebesar 0,93%. Terang redup lampu dapat diatur sesuai tempo dengan rata–rata galat sebesar 4,45%.
ix
ABSTRACT
Stage lighting as lighting system can give an attractive visual impression. Stage lighting can affirm the expression of an art performance. Music is a part of art performance that can give deep emotion for the audience. Harmony between lighting system and music make improvement of art performance expression. This research is an innovation to make a harmony between ignition of stage lighting and music.
Stage lighting controlled by music use Raspberry Pi as central of system control. Music file is given as input of Raspberry Pi. Raspberry Pi process the input using pitch and tempo detection method. The result of pitch detection establish the ignition and color variety of stage lighting. The result of tempo detection establish the brightness of stage lighting.
The system of stage lighting controlled by music based on Raspberry Pi has been successful to give variation of lighting ignition appropriate to music. The system can distinguish the pitch and tempo of music. Stage lighting can produce color variation appropriate to pitch variation and produce duration of stage lighting ignition with average error 0,93%. The brightness of stage lighting can be adjust based on tempo of music with average error 4,45%.
x
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa, atas rahmat serta karunia-Nya sehingga penulis berhasil membuat tugas akhir berjudul “Lampu Panggung Terkendali Musik Berbasis Raspberry Pi” dengan baik.
Selama pembuatan tugas akhir ini, penulis menyadari adanya bantuan dan dukungan dari berbagai pihak. Oleh karena itu, penulis mengucapkan terima kaih kepada:
1. Bernadeta Wuri Harini, S.T., M.T. selaku dosen pembimbing yang memberikan bimbingan, pemikiran, ide, saran, dan kritik yang membangun dalam menyelesaikan tugas akhir dan tulisan ini.
2. Seluruh dosen dan laboran Teknik Elektro yang memberikan ide, ilmu dan pengetahuan kepada penulis selama perkuliahan.
3. Mahasiswa Teknik Elektro yang membantu dan mendukung penulis dalam diskusi dan pengembangan ide tugas akhir serta dalam proses perkuliahan.
Penulis menyadari bahwa tulisan ini masih memiliki kekurangan dan jauh dari sempurna. Oleh karena itu kritik dan saran dari semua pihak yang bersifat membangun sangat diharapkan. Semoga tugas akhir ini dapat bermanfaat bagi semua pihak. Terima kasih.
Yogyakarta, 12 Mei 2014
xi
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
LEMBAR PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xvii
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat ... 3
1.3. Batasan Masalah ... 3
1.4. Metodologi Penelitian ... 4
BAB II DASAR TEORI ... 6
2.1. Raspberry Pi ... 6
2.2. Bahasa Pemrograman Python ... 7
2.3. Light Emitting Diode (LED) ... 8
2.4. Driver LED ... 9
2.4.1. Penyearah Satu Fasa Gelombang Penuh ... 9
2.4.2. Regulator LM317 ... 11
2.4.3. Regulator Buck ... 12
2.5. MOSFET Gate Drive ... 13
xii
2.7. Metode Beat Tracking ... 17
2.7.1. Analisis Frekuensi ... 18
2.7.1.1. Fast Fourier Transform (FFT) ... 18
2.7.1.2. Penguraian Komponen-Komponen Onset ... 18
2.7.1.3. Onset-time finders ... 19
2.7.1.4. Onset-time Vectorizer ... 20
2.7.2. Beat Prediction ... 20
2.7.2.1. Beat-predicting Agents ... 22
2.7.2.2. Chord change checkers ... 25
2.7.2.3. Hypothesis manager ... 28
2.8. Teori Musik ... 29
BAB III RANCANGAN PENELITIAN ... 30
3.1. Perancangan Sistem ... 30
3.2. Perancangan Mekanik ... 31
3.3. Pengambilan Perangkat Keras ... 34
3.3.1. Konfigurasi LED ... 34
3.3.2. Regulator Tegangan ... 35
3.3.2.1. Regulator Linear ... 36
3.3.2.2. Regulator Switching ... 37
3.3.3. Gate Drive MOSFET ... 41
3.3.4. Penggunaan Port GPIO ... 43
3.4. Perancangan Perangkat Lunak ... 44
3.4.1. Program Pitch Detection ... 45
3.4.2. Program Beat Tracking ... 46
3.4.2.1. Program Analisis Frekuensi ... 47
3.4.2.2. Program Beat Prediction ... 48
BAB IV HASIL DAN PEMBAHASAN ... 49
4.1. Perubahan Perancangan ... 49
4.1.1. Perubahan Perancangan Pendeteksian Tempo ... 49
4.1.2. Perubahan Perancangan Driver LED ... 52
4.2. Hasil Implementasi ... 54
4.3. Analisa Keberhasilan Alat ... 58
xiii
4.4.1. Pembahasan Driver LED Warna Merah ... 64
4.4.2. Perubahan Perancangan Driver LED ... 66
4.4.3. Pembahasan Driver LED Warna Biru ... 68
4.4.4. Pembahasan Gate Drive MOSFET ... 71
4.5. Pembahasan Perangkat Lunak ... 73
4.5.1. Pembahasan Perangkat Lunak Pendeteksian Nada ... 78
4.5.2. Pembahasan Program Pendeteksian Tempo ... 83
BAB V KESIMPULAN DAN SARAN... 89
5.1. Kesimpulan ... 89
5.2. Saran ... 90
DAFTAR PUSTAKA ... 91 LAMPIRAN ... L1
xiv
DAFTAR GAMBAR
Halaman
Gambar 1.1. Diagram Blok Sistem ... 3
Gambar 2.1. Konfigurasi pin pada port GPIO... 7
Gambar 2.2. High Power LED ... 8
Gambar 2.3. LED terhubung seri... 8
Gambar 2.4. Rangkaian penyearah satu fasa gelombang penuh ... 9
Gambar 2.5. Gelombang masukan dan keluaran penyearah ... 10
Gambar 2.6. Gelombang keluaran penyearah terhubung filter ... 10
Gambar 2.7. Rangkaian regulator IC LM317 ... 11
Gambar 2.8. Rangkaian converter buck... 12
Gambar 2.9. Rangkaian totem pole ... 14
Gambar 2.10. Rangkaian totem pole terisolasi optis ... 14
Gambar 2.11. Blok Diagram Metode Autocorrelation Pitch Detector ... 15
Gambar 2.12. Proses beat tracking ... 17
Gambar 2.13. Penguraian komponen onset ... 19
Gambar 2.14. Relasi onset-time vectorizer, agen-agen, dan chord change checkers ... 20
Gambar 2.15. Interaksi agen ... 21
Gambar 2.16. Proses memprediksi next beat ... 22
Gambar 3.1 Diagram blok sistem ... 30
Gambar 3.2. Desain wadah lampu ... 31
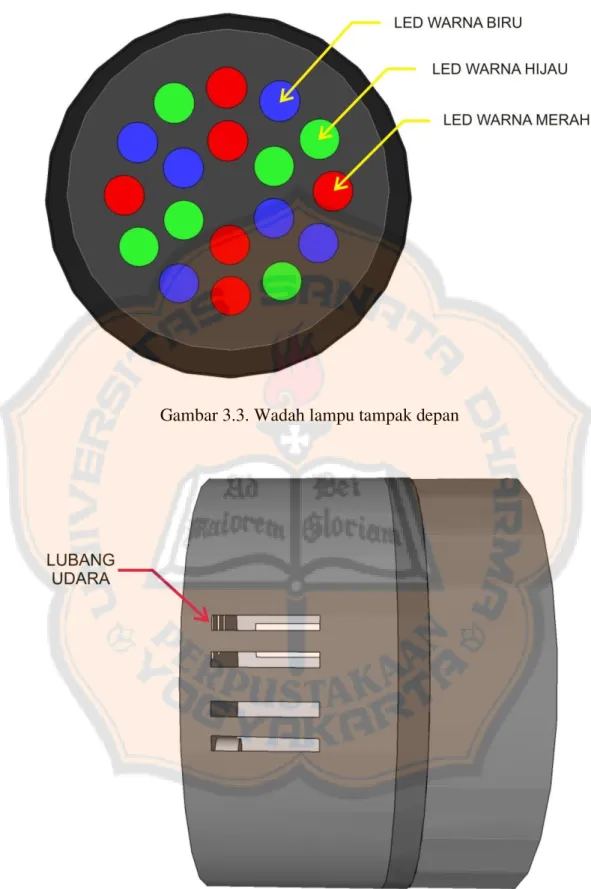
Gambar 3.3. Wadah lampu tampak depan ... 32
Gambar 3.4. Wadah lampu tampak samping kanan ... 32
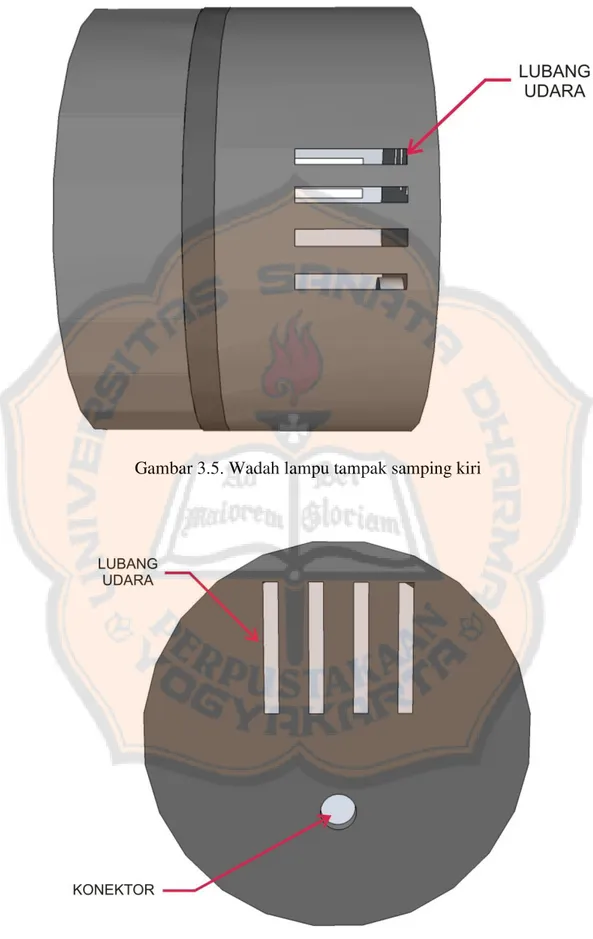
Gambar 3.5. Wadah lampu tampak samping kiri ... 33
Gambar 3.6. Wadah lampu tampak belakang ... 33
Gambar 3.7. Rangkaian LED warna merah ... 34
Gambar 3.8. Rangkaian LED warna hijau ... 35
Gambar 3.9. Rangkaian LED warna biru ... 35
Gambar 3.10. Rangkaian penyearah tegangan ... 35
Gambar 3.11. Rangkaian regulator linear LED warna merah ... 36
xv
Gambar 3.13. Rangkaian regulator switching untuk LED warna merah ... 38
Gambar 3.14. Rangkaian regulator switching untuk LED warna hijau dan biru ... 39
Gambar 3.15. Gambar rangkaian Driver LED ... 39
Gambar 3.16. Rangkaian regulator linear sebagai sumber tegangan gate driver MOSFET ... 42
Gambar 3.17. Rangkaian gate drive MOSFET ... 42
Gambar 3.18. Keseluruhan rangkaian gate drive MOSFET ... 43
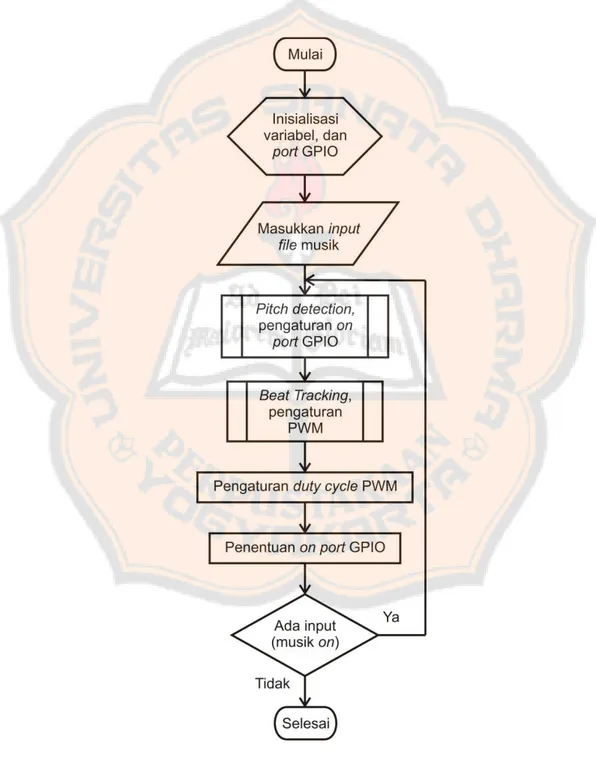
Gambar 3.19. Diagram alir utama ... 44
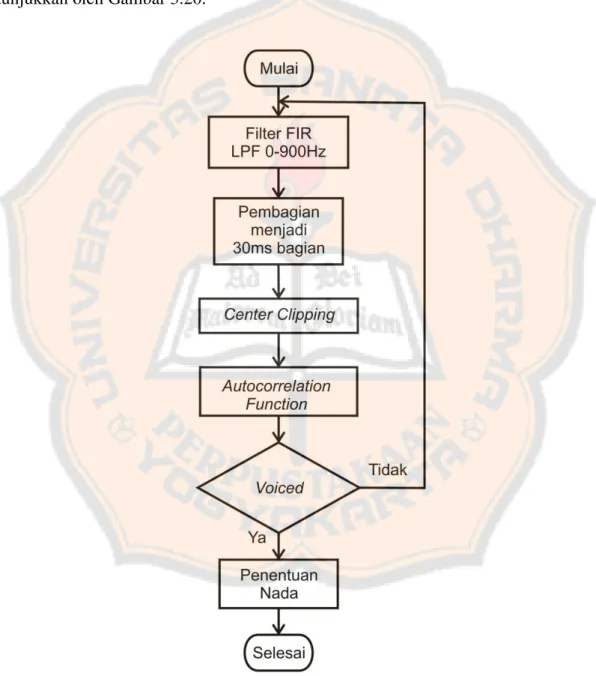
Gambar 3.20. Diagram alir proses Pitch Detection ... 45
Gambar 3.21. Diagram alir proses beat tracking ... 46
Gambar 3.22. Diagram alir program Analisis Frekuensi... 47
Gambar 3.23. Diagram alir program Beat Prediction ... 48
Gambar 4.1. Diagram alir pendeteksian tempo ... 52
Gambar 4.2. Rangkaian perhitungan disipasi daya IC LM317 ... 52
Gambar 4.3. Karakteristik IC LM317 ... 54
Gambar 4.4. Karakteristik IC LM350 ... 54
Gambar 4.5 Bentuk fisik driver LED ... 55
Gambar 4.6 Bentuk fisik lampu panggung tampak depan ... 55
Gambar 4.7 Bentuk fisik lampu panggung tampak belakang ... 56
Gambar 4.8 Bentuk fisik lampu panggung tampak samping kanan ... 56
Gambar 4.9 Bentuk fisik lampu panggung tampak samping kiri ... 56
Gambar 4.10. Tampilan antarmuka awal... 57
Gambar 4.11. Tampilan antarmuka untuk memilih file ... 57
Gambar 4.12. Tampilan antarmuka untuk memainkan musik dan menyalakan lampu .. 57
Gambar 4.13. Grafik hasil pengujian driver LED warna merah terhadap tempo ... 62
Gambar 4.14. Grafik hasil pengujian driver LED warna hijau terhadap tempo ... 63
Gambar 4.15. Grafik hasil pengujian driver LED warna biru terhadap tempo ... 63
Gambar 4.16. Grafik galat hasil pengujian driver LED terhadap tempo ... 64
Gambar 4.17. Grafik hasil pengujian kapasitor filter driver LED ... 65
Gambar 4.18. Grafik galat hasil pengujian kapasitor filter driver LED ... 66
Gambar 4.19. Grafik hasil pengujian regulator linear LED warna merah ... 67
Gambar 4.20. Grafik hasil pengujian regulator linear LED warna hijau dan biru ... 67
xvi
Gambar 4.22. Grafik hasil pengujian regulator switching untuk LED warna merah ... 69
Gambar 4.23. Grafik hasil pengujian regulator switching untuk LED warna hijau ... 69
Gambar 4.24. Grafik hasil pengujian regulator switching untuk LED warna biru ... 70
Gambar 4.25. Grafik galat hasil pengujian regulator switching untuk LED ... 70
Gambar 4.26 Grafik hasil pengujian kapasitor filter gate drive MOSFET ... 71
Gambar 4.27 Grafik hasil pengujian regulator linear gate drive MOSFET ... 72
Gambar 4.28 Grafik galat hasil pengujian rangkaian gate drive MOSFET ... 72
Gambar 4.29. Grafik hasil pendeteksian nada ... 81
Gambar 4.30. Grafik galat hasil pendeteksian nada ... 81
Gambar 4.31. Grafik hasil pengujian durasi nada ... 82
Gambar 4.32. Grafik galat hasil pengujian durasi nada ... 82
Gambar 4.33. Grafik hasil pengujian pendeteksian tempo 61 bpm s.d. 75 bpm ... 87
Gambar 4.34. Grafik hasil pengujian pendeteksian tempo 76 bpm s.d. 120 bpm ... 87
xvii
DAFTAR TABEL
Halaman
Tabel 2.1. Tabel inisialisasi parameter ... 21
Tabel 2.2. Hubungan nada dengan frekuensi ... 29
Tabel 3.1. Perbandingan kebutuhan induktor ... 40
Tabel 3.2. Penggunaan port GPIO ... 43
Tabel 3.3. Penentuan notasi dan nyala lampu ... 46
Tabel 3.4. Pengaturan variasi duty cycle ... 47
Tabel 4.1. Rata-rata waktu tunggu ... 57
Tabel 4.2. Hasil pengujian kondisi nyala lampu dengan masukan file Sample1.wav ... 60
Tabel 4.3. Hasil pengujian kondisi nyala lampu dengan masukan file Sample2.wav ... 61
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Dalam sebuah pertunjukan seni, cara menyajikan pertunjukan menentukan menarik tidaknya suatu pertunjukan seni. Penyajian suatu pertunjukan seni dalam suatu panggung perlu diberi tambahan unsur seni lain. Penambahan unsur ini dibutuhkan agar penyampaian ekspresi suatu seni dapat disuguhkan secara maksimal. Unsur–unsur tambahan ini dapat berupa tata panggung, tata suara, dan tata cahaya. Masing–masing unsur mempunyai keunikan sendiri dalam menghadirkan tambahan nilai estetika dalam pertunjukan.
Tata cahaya dapat memberi kesan visual yang menarik. Cahaya tidak hanya menerangi pertunjukan, tetapi juga dapat memberikan penegasan ekspresi pada pertunjukan seni. Tampilan warna yang tercipta dapat membuat pertunjukan tidak membosankan. Warna-warni dan perubahan cahaya memberikan kesan yang segar sebagaimana televisi berwarna yang lebih segar dan menarik daripada televisi hitam putih. Efek terang redup dan kelap-kelip cahaya akan membawa suasana berbeda. Emosi penonton pertunjukan menjadi terfokus mengikuti perubahan suasana yang dihasilkan.
Kesan visual ini tentu akan lebih bertambah jika dibuat dalam keselarasan dengan unsur lain. Unsur yang dimaksud yaitu musik. Selain cahaya, musik juga mempunyai keunikan dalam memberikan suasana tertentu yang mempengaruhi emosi penonton. Perpaduan cahaya dan musik memberikan peningkatan estetika dan penyampaian ekspresi. Perpaduan ini perlu diusahakan menjadi selaras, tidak menghasilkan kesan yang berbeda dalam suatu waktu. Perbedaan kesan yang ditimbulkan bisa berakibat buruknya pertunjukan inti yang dibuat.
Pada penelitian ini akan dibuat lampu panggung yang terkendali musik. Nyala lampu akan mengikuti musik yang dimainkan. Ada beberapa unsur dari nyala lampu yang akan diubah-ubah berdasarkan musik. Unsur tersebut antara lain warna lampu, terang redup, dan lama nyala tiap warna. Dalam penelitian ini, unsur musik yang berupa frekuensi (tinggi rendah nada) dan tempo digunakan sebagai masukan pengendalian nyala lampu. Nilai frekuensi yang didapat digunakan untuk mengatur perubahan warna lampu dan lama nyala tiap warna. Tempo digunakan untuk mengatur terang redup lampu.
Masukan musik diberikan dengan cara memberikan masukan berupa file musik pada sistem. File tersebut dimasukkan pada Raspberry Pi. Raspberry Pi mempunyai kemampuan yang cukup untuk mendapat masukan dan menyimpan file musik. Raspberry Pi juga dapat memainkan file musik tersebut [1]. Dalam sistem ini, file musik akan dimainkan bersamaan dengan pengendalian lampu yang dilakukan.
Raspberry Pi tidak hanya digunakan untuk menerima masukan dan memainkan file musik tersebut. Perangkat ini juga digunakan untuk mengolah sinyal masukan. Hasil dari pengolahan sinyal berupa tingkatan-tingkatan frekuensi dan tempo. Tingkatan-tingkatan yang diperoleh menjadi suatu perintah otomatis dalam menghasilkan perubahan nyala lampu. Perubahan tersebut dicapai dengan memberikan tingkatan sinyal pada lampu. Sinyal yang dimaksud berupa Pulse Width Modulation (PWM) yang dihasilkan Raspberry Pi.
Sinyal PWM dengan tingkatan yang berubah-ubah akan menjadi masukan sebuah
driver LED. Driver LED mengubah-ubah tegangan pada LED sehingga terang redup LED berubah [2]. Raspberry Pi juga mengatur hidup mati lampu. Pengaturan hidup mati lampu yang dimaksud tidak hanya mengatur hidup mati warna lampu tertentu. Pengaturan hidup mati lampu juga dimaksudkan dalam pengaturan seberapa lama suatu lampu hidup dan seberapa lama lampu mati.
Aplikasi pengolahan musik menggunakan Raspberry Pi yang telah ada yaitu aplikasi sinkronisasi musik dengan lampu menggunakan Musical Instrument Digital
Interface (MIDI) [3]. MIDI merupakan protokol komunikasi yang menghubungkan instrumen-instrumen musik elektronik (digital) untuk saling berinteraksi dan berinteraksi dengan komputer [4][5]. MIDI akan mengeluarkan informasi mengenai nada yang dimainkan masukan [5]. Informasi tersebut diterima komputer atau instrumen lain kemudian digunakan untuk menentukan keluaran (lampu). Berbeda dengan menggunakan MIDI yang hanya menginformasikan nada yang dimainkan masukan untuk menentukan keluaran, penelitian ini menggunakan metode untuk mendeteksi nada dan tempo dengan pengolahan sinyal.Metode pendeteksian nada dan tempo yang digunakan dalam penelitian ini belum pernah diaplikasikan menggunakan Raspberry Pi. Metode pendeteksian nada dan tempo yang digunakan hanya diaplikasikan menggunakan komputer [6][7].
1.2.
Tujuan dan Manfaat
Tujuan penelitian ini yaitu menghasilkan lampu panggung yang berubah-ubah warna, terang redup, dan lama nyala lampu menurut perubahan data file musik. Perubahan nyala lampu diharapkan dapat selaras dengan perubahan musik yang dimainkan.
Manfaat dari penelitian ini: a. Manfaat bagi masyarakat
Masyarakat dapat menikmati pertunjukan seni yang menampilkan keselarasan antara musik dengan cahaya yang dihasilkan. Masyarakat tidak hanya menikmati sajian tata cahaya yang menarik. Sajian tata cahaya yang selaras dengan musik akan memberikan efek saling mendukung antara tata cahaya dan musik. Keselarasan ini akan membuat perhatian penonton akan suatu pertunjukan terfokus. Ekspresi yang disampaikan pada pertunjukan tidak menjadi terpecah antara tata cahaya dengan musik. Keselarasan ini dicapai dengan teknologi baru yang sederhana dan lebih efisien dalam hal finansial dan ruang.
b. Manfaat bagi ilmu pengetahuan
Penelitian ini akan menambah aplikasi penggunaan Raspberry Pi. Pada saat penelitian ini dibuat, Raspberry Pi merupakan perangkat yang baru dikembangkan. Hasil penelitian ini menambah terciptanya karya dalam bidang elektro yang dapat diaplikasikan dalam pertunjukan seni.
1.3.
Batasan Masalah
Perancangan lampu panggung terkendali musik berbasis Raspberry Pi ini mencakup batasan-batasan sebagai berikut:
a. Masukan berupa file musik berekstensi wav.
b. Masukan musik berupa melodi dengan tempo 61 M.M. s.d. 120 M.M. (61 bpm s.d. 120 bpm) dan birama 4/4.
c. Menggunakan Raspberry Pi sebagai perangkat penerima masukan, pemutar file musik, pengolah sinyal, pembangkit sinyal Pulse Width Modulation (PWM).
d. Menggunakan bahasa pemrograman Python.
e. Pendeteksian nada menggunakan metode Modified Autocorrelation Function sedangkan penentuan tempo menggunakan metode Beat Tracking.
g. Variasi warna nyala LED sebanyak 7 variasi yang merepresentasikan 7 nada (C4, D4, E4, F4, G4, A4, dan B4).
h. Nyala lampu panggung diubah-ubah menggunakan driver LED dengan masukan Pulse
Width Modulation (PWM) dari Raspberry Pi.
1.4.
Metodologi Penelitian
a. Studi Pustaka
Studi pustaka dilakukan dengan pengumpulan informasi dari berbagai literatur. Literatur tersebut antara lain berupa buku, jurnal, datasheet. Selain itu, informasi dikumpulkan dari berbagai artikel di internet. Informasi yang dikumpulkan mencakup informasi mengenai Raspberry Pi, bahasa pemrograman Python, pengolahan sinyal digital, lampu LED 3Watt, dan driver LED.
b. Perancangan dan Pembuatan Alat
Gambar 1.1. Diagram Blok Sistem
Perancangan dan pembuatan alat dimulai dari pembuatan hardware. Hardware yang dibuat berupa rangkaian elektronik driver LED. Perancangan selanjutnya yaitu perancangan program pengolahan sinyal musik. Penentuan nilai Pulse Width Modulation (PWM) dilakukan berdasarkan pengolahan sinyal yang dilakukan.
c. Pengambilan data
Pengambilan data dilakukan dengan melihat keluaran Raspberry Pi berupa informasi pendeteksian nada dan tempo (pengolahan sinyal) dan tegangan keluaran driver LED. Informasi sinyal PWM yang diamati yaitu frekuensi dan duty cycle. Selain itu,
dilakukan pengambilan data berupa informasi on-off port GPIO dan lama waktu keadaan
on pada port GPIO.
d. Pembuatan analisa dan kesimpulan
Analisa dan pengambilan kesimpulan dibuat atas data yang diperoleh. Data berupa pengolahan sinyal dibandingkan dengan hasil pendeteksian nada menggunakan perangkat lunak Wavanal [8] dan pendeteksian tempo menggunakan perangkat lunak
AudioRetoucher [9]. Analisa dan pengambilan kesimpulan mengacu pada kesesuaian sistem yang dibuat dengan perancangan sistem yang diharapkan.
6
BAB II
DASAR TEORI
2.1.Raspberry Pi
Raspberry Pi merupakan komputer dalam satu singleboard. Sistem dalam chip Raspberry Pi yaitu BCM28351. Chip mengintegrasikan sebuah prosesor (CPU), graphics
processing unit (GPU), dan memori pada suatu unit tunggal [10]. Bagian-bagian Raspberry Pi adalah sebagai berikut:
1. Prosesor
Presesor berupa chip 32 bit, 700 MHz System on a Chip, dengan arsitektur ARM [11]. Raspberry Pi Model B mempunyai RAM sebesar 512 MB sedangkan Raspberry Pi Model A mempunyai RAM sebesar 256 MB [10].
2. Slot Secure Digital Card (SD Card)
Raspberry Pi mempunyai slot SD Card. SD Card dibutuhkan sebagai hard drive untuk menyimpan seluruh data.
3. Port USB
Raspberry Pi Model B mempunyai 2 port USB sedangkan Raspberry Pi Model A hanya mempunyai sebuah Port USB.
4. Port Ethernet
Raspberry Pi Model B mempunyai port Ethernet dengan standar RJ45. 5. Konektor HDMI
Port HDMI digunakan sebagai penyedia keluaran video dan audio digital. Sinyal HDMI mampu dikonversi menjadi DVI sehingga dapat digunakan untuk berbagai
monitor.
6. Output Audio Analog
Port audio analog digunakan sebagai penyedia keluaran audio analog untuk speaker dengan jack standar 3,5mm mini analog audio jack.
7. Keluaran Composite Video
Jack standar tipe RCA menyediakan keluaran untuk sinyal video NTSC dan PAL [12]. Selain itu terdapat port General Purpose Input/Output (GPIO) digunakan untuk berhubungan dengan suatu hardware eksternal. Raspberry Pi mempunyai 26 pin GPIO. Gambar 2.1. menunjukkan konfigurasi pin pada port GPIO.
Gambar 2.1. Konfigurasi pin pada port GPIO [10]
Pin 4, 9, 14, 17, 20, dan 25 tidak dapat digunakan karena masih dalam tahap pengembangan [10].
Operating System (OS) pada Raspberry Pi yaitu Linux. Prosesor Broadcom [1][12] mempunyai device driver dan kode yang tidak terdapat dalam standar Linux distribution. Ukuran RAM Raspberry Pi berbeda dengan ukuran RAM komputer. Linux distribution khusus untuk Raspberry Pi dikembangkan dalam mengatasi ketidaksesuaian Raspberry Pi dengan standar Linux. Linux distribution yang dibuat di antaranya: Raspbian (direkomendasikan secara resmi), Adafruit Raspberry Pi Educational Linux, Arch Linux, Xbian, Qton Pi [12].
2.2.Bahasa Pemrograman Python
Python ditemukan oleh Guido van Rossum. Python merupakan bahasa pemrograman aras tinggi. Program atau script Python dapat langsung dieksekusi, tidak perlu proses compiling ke kode mesin. Dalam Python, pemrogram tidak perlu menegaskan sebuah variabel berupa number, list, atau string [12][13]. Python merupakan open source
software. Bahasa pemrograman python masih dikembangkan dan diperbaiki [13]. 1. Modul NumPy
NumPy merupakan modul Python untuk scientific computing. Modul mempunyai kemampuan perhitungan N-dimensional arrays, operasi elemen-elemen, aljabar linier, dan mampu mengerjakan kode C/C++/Fortran [14].
2. Modul SciPy
SciPy merupakan paket yang menggunakan array NumPy dan memanipulasi data menggunakan permasalahan standar sains dan keteknikan seperti: integrasi, fungsi maksimum atau minimum, pemrosesan sinyal dan image, matriks serta statistika [14].
3. Modul RPi.GPIO
GPIO merupakan modul untuk mambaca dan mengendalikan port GPIO pada Raspberry Pi [12][15].
4. Modul Pexpect
Pexpect merupakan modul Python untuk mengendalikan suatu aplikasi secara otomatis [16].
2.3. Light Emitting Diode (LED)
Seperti dioda, arus pada LED akan mengalir dari muatan positif semikonduktor ke muatan negatif. Sisi bermuatan positif disebut anoda dan sisi bermuatan negatif disebut katoda [17]. Pada penelitian, LED yang digunakan berupa High Power LED berwarna merah, hijau, dan biru dengan Forward Current sebesar 0,7 A. Forward Voltage ( ) untuk LED warna merah sebesar 2,0 V s.d. 2,8 V. Forward Voltage untuk LED warna hijau dan biru sebesar 3,0 V s.d. 3,8 V [18]. Gambar 2.2 menunjukkan gambar High Power LED.
Gambar 2.2. High Power LED [18]
Pada rangkaian yang terhubung secara seri, tegangan seluruh rangkaian adalah penjumlahan dari masing-masing tegangan [19]. Gambar 2.3 menunjukkan beberapa LED yang dirangkai secara seri.
Tegangan total beberapa LED yang dirangkai seri dihitung:
(2.1)
Jika seluruh LED mempunyai besar tegangan yang sama, maka
(2.2)
Keterangan:
: Tegangan total rangkaian seri
: Forward Voltage LED : Jumlah LED
2.4.Driver LED
2.4.1.Penyearah Satu Fasa Gelombang Penuh
Rangkaian penyearah gelombang penuh dapat diperoleh dengan merangkai transformator dan 4 buah dioda [20]. Rangkaian penyearah satu fasa gelombang penuh ditunjukkan oleh Gambar 2.4.
Gambar 2.4. Rangkaian penyearah satu fasa gelombang penuh [21]
Daya disuplai ke dioda dan untuk mendapatkan setengah siklus positif. Dioda dan digunakan untuk memperoleh siklus negatif. Gambar 2.5 menggambarkan gelombang masukan dan gelombang keluaran penyearah [20].
Gambar 2.5. Gelombang masukan dan keluaran penyearah [20]
Untuk memperoleh tegangan keluaran yang berupa gelombang dc, keluaran penyearah dihubungkan dengan suatu filter. Filter berupa kapasitor. Kapasitor akan mengecilkan ripple pada gelombang keluaran [22]. Gambar 2.6 menunjukkan gelombang keluaran penyearah setelah dihubungkan dengan filter.
Nilai ripple kapasitor filter dapat dihitung sebagai berikut [23]: (2.3) Dimana:
: Ripple kapasitor filter : Tegangan ripple (rms)
: Tegangan keluaran dc (V) : Arus beban dalam miliamper
: Nilai kapasitor filter dalam mikrofarad
2.4.2.Regulator LM317
Untuk menghasilkan nilai tegangan tertentu, keluaran IC LM317 dihubungkan dengan resistor pembagi tegangan. IC LM317 membutuhkan pengoperasian dengan diberikannya beda tegangan antara masukan dengan keluaran. Beda tegangan dipengaruhi arus yang melewati regulator (semakin besar arus yang dibutuhkan, beda tegangan yang dibutuhkan juga semakin besar) [23]. Rangkaian regulator IC LM317 ditunjukkan oleh Gambar 2.7.
Tegangan keluaran regulator dapat dihitung menggunakan [23]:
( ) (2.4)
dengan dan
Keterangan:
: Tegangan keluaran regulator (V)
: Tegangan referensi (V) : Arus terminal adjustment (A)
: Resistor pembagi tegangan (Ω) : Resistor pembagi tegangan (Ω)
2.4.3.Regulator Buck
Regulator Buck adalah regulator yang berfungsi menghasilkan tegangan keluaran yang lebih rendah dari tegangan masukan. Dalam rangkaian konverter buck, sebuah MOSFET daya digunakan sebagai saklar tegangan masukan yang melewati induktor dan LED. MOSFET dihubungkan secara seri dengan induktor dan LED. Induktor digunakan untuk menyimpan energi ketika MOSFET dalam kondisi on. Energi digunakan untuk menyediakan arus saat MOSFET dalam kondisi off. Konverter buck menghasilkan arus yang konstan dalam efisiensi yang tinggi. Konverter buck dapat dirancang dengan efisiensi di atas 90% [24]. Gambar 2.8 menunjukkan rangkaian konverter buck sebagai driver LED.
Nilai kritis induktor [20]:
f R k L LC 2 1 (2.5)Nilai kritis kapasitor [20]:
2 16 1 Lf k C CC (2.6) Dengan (2.7) (2.8) Dimana:: Nilai kritis induktor : Nilai kritis kapasitor : Frekuensi penyaklaran
: Duty cycle sinyal penyaklaran : Hambatan beban
: Tegangan keluaran : Tegangan masukan : Arus keluaran
2.5.MOSFET Gate Drive
Rangkaian gate drive digunakan untuk meminimumkan rugi pensaklaran pada suatu konverter. Rangkaian gate drive dirancang agar menghasilkan transisi pensaklaran yang cepat. MOSFET merupakan komponen terkontrol tegangan. Pengaturan kondisi on dan off suatu MOSFET relatif mudah. Kondisi on dapat dicapai jika tegangan gate ke
source melebihi tegangan threshold. Biasanya, tegangan gate ke source MOSFET untuk mencapai kondisi on yaitu antara 10 V dan 20 V.
Salah satu jenis rangkaian gate drive MOSFET yaitu double emitter-follower atau
yang cocok. Gambar 2.9 menunjukkan gambar rangkaian totem pole. Ketika masukan rangkaian totem pole dalam kondisi high, akan on dan akan off, sehingga MOSFET dalam kondisi on. Ketika masukan rangkaian totem pole dalam kondisi low, akan off dan akan on, sehingga MOSFET dalam kondisi off [22].
Gambar 2.9. Rangkaian totem pole [22]
Pada umumnya, titik referensi ground untuk sinyal masukan dan gate drive tidak sama [25]. Perlu adanya isolasi antara masukan gate drive yang berupa gelombang pulsa dengan rangkaian gate drive. Isolasi sinyal masukan dengan rangkaian gate drive dapat berupa optocoupler. Optocoupler merupakan kombinasi antara infrared light emitting
diode (ILED) dengan sebuah silicon phototransistor. Sinyal input diberikan pada ILED dan akan didapatkan keluaran pada phototransistor [20]. Gambar 2.10 menunjukkan rangkaian totem pole terisolasi optis.
2.6.Metode Pitch Detection (Metode Modified Autocorrelation Function)
Modified autocorrelation pitch detector bekerja berdasarkan metodecenter-clipping. Gambar 2.11 menunjukkan blok diagram algoritma pendeteksian pitch. Metode membutuhkan low pass filter 0 s.d. 900 Hz menggunakan tapis digital Finite Impulse
Response (FIR). Sinyal suara yang telah ditapis kemudian didigitalkan pada sampling rate ( ) 10 kHz dan dibagi menjadi 30ms bagian (300 sampel) [26][27].
Gambar 2.11. Blok Diagram Metode Autocorrelation Pitch Detector [27]
Bagian pertama pemrosesan yaitu komputasi clipping level ( ) untuk 30ms bagian dari sinyal suara. Clipping level diatur 64% lebih kecil dari nilai peak absolute sample pada awal dan akhir 10ms. Kemudian, proses center clipping dan infinite peak clipping dilakukan pada 30ms bagian dari sinyal suara. Hasil proses center clipping dan infinite
peak clipping diasumsikan dalam 3 level : +1 jika sampel melebihi level clipping positif, -1 jika sampel di bawah level clipping negatif, dan 0 untuk keadaan lain [27][28].
[ ] { | | (2.9) Keterangan :
: sinyal keluaran proses center clipping : sinyal masukan
Setelah proses clipping, proses selanjutnya melakukan perhitungan menggunakan fungsi autocorrelation 30ms bagian dari sinyal dengan jangkauan lag dari 20 sampel sampai dengan 200 sampel (periode 2ms sampai dengan 200ms) [27]. Fungsi
autocorrelation adalah sebagai berikut [28]:
∑ (2.10) Keterangan: : fungsi autocorrelation : lag : sinyal masukan
: panjang sequence yang teranalisis
: jumlah poin autocorrelation yang dihitung
Pada prakteknya, sinyal yang digunakan merupakan sinyal short speech segment. Hal ini menyebabkan pemrosesan berbasis metode autocorrelation menggunakan fungsi
short-time autocorrelation [28]:
∑
(2.11)
Proses dilanjutkan dengan mencari nilai maksimum dari fungsi autocorrelation. Jika nilai maksimum melebihi 0,3, bagian maksimum dikategorikan sebagai voiced dan lokasi bagian maksimum ini merupakan periode pitch. Bagian dengan nilai maksimum lainnya dikategorikan sebagai unvoiced [26][27]. Frekuensi fundamental (frekuensi pitch) dapat dihitung [7]:
(2.12)
dengan
Keterangan:
: frekuensi fundamental (frekuensi pitch) : periode pitch
: lag
: periode sampling : sampling rate
Sebelum melakukan proses autocorrelation, sinyal dites menggunakan Silence
Detector. Tes ini menentukan amplitudo puncak sinyal cukup besar atau tidak. Threshold terpilih pada ⁄ dari nilai puncak sinyal absolut. Jika puncak sinyal di atas threshold, bagian sinyal dianggap sebagai sinyal speech, proses komputasi Pitch Detection dilakukan. Jika puncak sinyal di bawah threshold, bagian sinyal dianggap sebagai unvoiced (silence) dan tidak dilakukan komputasi [26][27].
2.7.Metode Beat Tracking
Gambaran sistem beat tracking ditunjukkan pada Gambar 2.12. Pada metode beat
tracking yang digunakan, ada tiga keluaran dari hasil sistem yaitu beat time, beat type, dan
current tempo. Keluaran ini disebut beat information (BI) [6].
Mula-mula sinyal masukan yang berupa sinyal analog diubah menjadi sinyal digital dalam bagian A/D Conversion. Pada bagian analisis frekuensi, onset-time finders mendeteksi onset time pada jangkauan spektrum frekuensi yang berbeda, hasilnya ditransformasikan oleh onset-time vectorizers dalam bentuk vektor dan disebut onset-time
vector. Pada bagian beat prediction, sistem mengatur agen-agen yang membuat hipotesis paralel berdasarkan onset time vector. Masing–masing agen menghitung inter-beat interval dan memprediksi beat time berikutnya. Agen-agen dan chord change checker menentukan
beat type. Hypothesis manager mengumpulkan seluruh hipotesis dan menentukan keluaran akhir [6].
2.7.1.Analisis Frekuensi
Pada bagian analisis frekuensi, spektrum frekuensi dan onset time vectors diperoleh. Pita frekuensi penuh dipecah menjadi beberapa jangkauan frekuensi [6].
2.7.1.1.Fast Fourier Transform (FFT)
Spektrum frekuensi dihitung dengan FFT menggunakan Hanning window. Dalam implementasi ini, sinyal input didigitalkan menjadi 16 bit/22,05 kHz. FFT digunakan untuk mendapatkan komponen-komponen onset pada bagian analisis frekuensi. FFT dihitung dengan window size 1024 sampel, dan window digeser 256 sampel, resolusi frekuensi 21,53Hz dan discrete time step 11,61 ms (1 frame-time). FFT juga digunakan untuk menentukan perubahan chord pada bagian beat predicton. FFT dihitung dalam audio down
sampled 16 bit/11,025 kHz dengan window size 1024 sampel, dan window digeser 128 sampel, resolusi frekuensi 10,77 Hz dan time step 1 frame-time [6].
2.7.1.2.Penguraian Komponen-Komponen Onset
Komponen–komponen frekuensi diuraikan sebagai komponen onset. Komponen-komponen frekuensi merupakan Komponen-komponen frekuensi pada saat daya meningkat secara cepat. Gambar 2.13 menunjukkan penguraian komponen onset [6][29].
Gambar 2.13. Penguraian komponen onset [29]
Komponen frekuensi diuraikan menjadi komponen onset dengan derajat
onset [6][28]: { ( ) (2.14) dengan kondisi ( ) (2.15) ( ) (2.16) Keterangan: : komponen frekuensi : waktu : frekuensi : daya sebelumnya
2.7.1.3.Onset-time finders
Langkah perrtama dalam pengolahan sinyal audio yaitu penguraian sinyal untuk menghasilkan onset time. Sinyal diuraikan menjadi beberapa tingkatan frekuensi. Frekuensi diuraikan menjadi tujuh jangkauan frekuensi (0–125 Hz, 125–250 Hz, 250–500 Hz, 0.5–1 kHz, 1–2kHz, 2–4kHz, and 4–11kHz). Setiap onset time diperoleh dengan menemukan peak time menggunakan peak picking [6].
2.7.1.4.Onset-time Vectorizer
Setiap onset-time vectorizer mentransformasi hasil dari seluruh onset-time finders menjadi sebuah sequence of onset-time vector. Vektor tersebut merupakan gabungan onset
time yang sama dalam seluruh jangkauan frekuensi. Dalam sistem ini, tiga buah vectorizers mentransformasikan onset times dari tujuh finders menjadi tiga sequence of
seven-dimensional onset-time vector dengan bobot frekuensi yang berbeda-beda (pada seluruh jangkauan frekuensi, jangkauan frekuensi rendah dan jangkauan frekuensi menengah). Hasil dari proses onset-time vectorizer dikirim ke bagian beat prediction [6].
2.7.2.Beat Prediction
Dalam proses beat prediction terdapat agen-agen yang mengolah sequence of
onset-time vector berdasarkan strategi yang berbeda-beda dan mempertahankan hipotesis masing. Setiap hipotesis terdiri dari sebuah predicted next-beat time, masing-masing beat type (tipe half-note-level, tipe measure level) dan current inter-beat interval. Relasi antara onset-time vectorizer, agen-agen, dan chord change checker pada proses beat
prediction ditunjukkan oleh Gambar 2.14. Hipotesis-hipotesis ini digabungkan oleh
hypothesis manager. Hipotesis yang paling handal dianggap sebagai keluaran sistem [6].
Gambar 2.14. Relasi onset-time vectorizer, agen-agen, dan chord change checkers [6]
Seluruh agen dijadikan berpasangan. Dua agen yang berpasangan memeriksa
inter-beat interval dan memprediksi next-beat time. Prediksi dari kedua agen akan selalu berbeda sebesar setengah inter-beat interval. Satu agen berinteraksi dengan agen lain pada
yang diharapkan. Gambar 2.15 menunjukkan interaksi dua agen yang berpasangan. Tinggi masing-masing puncak lokal pada prediction field dapat ditafsirkan sebagai kemungkinan posisi next-beat. Dua agen beriteraksi satu sama lain dengan menghambat (inhibit) masing-masing prediction field [6].
Gambar 2.15. Interaksi agen [6]
Ada empat parameter yang digunakan untuk menentukan strategi dalam membuat hipotesis oleh setiap agen [6]. Parameter yang digunakan terdaftar dalam Tabel 2.1.
Tabel 2.1. Tabel inisialisasi parameter [6]
Keterangan:
1. Parameter frequency focus type digunakan untuk menentukan dari vectorizer mana
onset-time vector yang diterima sebuah agen. Jenis frequency focus type yaitu type-all (terfokus pada seluruh jangkauan frekuensi), type-low (terfokus pada jangkauan frekuensi rendah), dan type-mid (terfokus pada jangkauan frekuensi menengah).
2. Parameter autocorrelation period digunakan untuk menentukan ukuran jendela untuk menghitung vectorial autocorrelation dari onset-time vector sequence.
3. Parameter beat interval range digunakan untuk mengendalikan jangkauan
inter-beat interval yang masih mungkin.
4. Parameter initial peak selection memberikan nilai primary atau secondary. Nilai
primary merujuk pada puncak terbesar pada prediction field yang dipilih dan dianggap sebagai next beat time. Nliai secondary merujuk pada puncak terbesar kedua yang dipilih. Penyeleksian ini membantu membuat variasi hipotesis [6].
2.7.2.1.Beat-predicting Agents
1. Penentuan inter-beat interval
Untuk menentukan inter-beat interval, masing-masing agen menerima sequence of
onset-time vector dan menghitung vectorial autocorrelation. Fungsi vectorial
autocorrelation yang terjendela dan ternormalisasi adalah sebagai berikut: ∑ ( ⃗ ⃗ )
∑ ( ⃗ ⃗ )
(2.18)
dimana ⃗ merupakan onset-time vector N-dimensi pada waktu , merupakan waktu saat ini dan merupakan parameter strategi autocorrelation period. Fungsi jendela dengan ukuran jendela dinyatakan sebagai berikut
{ (2.19)
Inter-beat interval dinyatakan sebagai dengan tinggi maksimum . Jangkauan
inter-beat interval dibatasi oleh inter-beat interval range. 2. Memprediksi next beat time
Untuk memprediksi next beat time, masing-masing agen membentuk suatu
prediction field. Gambar 2.16 menunjukkan proses memprediksi next beat.
Prediction field merupakan hasil dari perhitungan fungsi cross correlation terjendela antara jumlah dari seluruh dimensi ⃗ dan beat-time sequence sementara dimana interval merupakan inter-beat interval.
∑ ( ∑ ) (2.20) { (2.21) { (2.22)
merupakan inter-beat interval pada waktu t, merupakan ukuran jendela untuk menghitung cross correlation, dan merupakan konstanta faktor yang menentukan berapa banyak ketukan sebelumnya yang dipertimbangkan dalam perhitungan cross correlation. Prediction field dinyatakan sebagai dimana . Masing-masing agen memilih next beat time dari puncak lokal pada prediction field setelah field dihalangi (inhibit) agen pasangan.
3. Menentukan beat type
Setiap agen menentukan beat type dari beat time yang diprediksi menurut half-note
time dan measure time. Sistem menggunakan dua macam kemungkinan perubahan chord dengan mengikuti struktur beat higher-level (memutuskan half-note time dan measure
time) dan memilih bermacam hipotesis terbaik yang dibuat agen untuk menentukan posisi ketukan. Ada 2 jenis musical knowledge yang digunakan dalam penentuan perubahan
chord yaitu:
Quarter-note-level knowledge. Chord-chord lebih mungkin berubah pada awal pengukuran daripada pada posisi lain. Kemungkinan perubahan chord quarter-note cenderung menjadi lebih tinggi pada ketukan kuat daripada ketukan lemah. Perubahan lebih tinggi pada ketukan kuat pada awal pengukuran daripada ketukan kuat lain. Eight-note-level knowledge. Chord-chord lebih mungkin berubah pada ketukan
daripada antar ketukan yang berdekatan. Kemungkinan perubahan chord eight-note cenderung lebih tinggi pada ketukan daripada pada posisi perpindahan eight-note.
Sistem menggunakan quarter-note-level knowledge untuk mendeteksi struktur ketukan higher-level. Sistem menghitung , yang merepresentasikan kecenderungan dari kemungkinan perubahan chord quarter-note sebelumnya, dan
menghitung , yang merepresentasikan kecenderungan dari kemungkinan setiap empat perubahan chord quarter-note sebelumnya.
(2.23)
(2.24) merupakan faktor yang menentukan berapa banyak nilai sebelumnya yang diambil menjadi pertimbangan dan merupakan faktor yang menentukan berapa banyak nilai saat ini yang diambil menjadi pertimbangan. Nilai konstan ini diatur pada dan . Nilai menjadi lebih tinggi ketika cenderung menjadi lebih tinggi pada ketukan kuat, yang terjadi pada setiap quarter-note. Nilai menjadi lebih tinggi ketika cenderung menjadi lebih tinggi pada awal pengukuran, yang terjadi pada setiap quarter
note keempat.
Jika , sistem memutuskan posisi
half-note time , dengan merupakan threshold konstan dalam
keputusan. Jika merupakan half-note time dan sistem memutuskan posisi measure-note time , dengan
merupakan threshold konstan. Kehandalan pengambilan keputusan ini didefinisikan sebagai berikut:
| | (2.25) | | (2.26) Sistem menentukan tipe ketukan (tipe half-note-level dan tipe measure-level) dengan menggunakan posisi sebelumnya dari half-note time dan measure time. Asumsi
strong dan weak merujuk pada beat time. Asumsi beginning dan middle merujuk pada
half-note time.
Untuk memilih hipotesis terbaik, sistem menggunakan eight-note-level knowledge. Keluaran akhir ditentukan pada dasar hipotesis yang tepat yang mempunyai kehandalan lebih tinggi. Untuk mengevaluasi kehandalan hipotesis, sistem menghitung .
( ) (2.27)
Jika menjadi cukup tinggi (kemungkinan perubahan chord eight-note cenderung lebih besar pada ketukan daripada pada posisi lain), nilai kehandalan meningkat sehingga sistem dapat menyeleksi hipotesis yang menghasilkan yang tepat.
4. Mengevaluasi kehandalan hipotesis
Setiap agen mengevaluasi kehandalan hipotesis dengan mengikuti tiga langkah. Langkah pertama dilakukan dengan mengevaluasi kehandalan hipotesis berdasarkan bagaimana next beat time diprediksi pada basis onset time bersamaan (coincided) dengan waktu terprediksi (extrapolated) dari past beat time. Jika onset time bersamaan, kehandalan meningkat.
Pada langkah kedua, kehandalan hipotesis dievaluasi berdasarkan seberapa tepat kemungkinan perubahan chord eight note. Jika cukup tinggi, kehandalan hipotesis meningkat, jika terjadi sebaliknya kehandalan hipotesis menurun. Langkah ketiga dilakukan dengan mengevaluasi kehandalan hipotesis berdasarkan seberapa tepat kemungkinan perubahan hipotesis quarter-note. Jika cukup tinggi, kehandalan hipotesis menjadi sedikit meningkat [6].
2.7.2.2.Chord change checkers
Dengan menggunakan beat time sementara dihasilkan basis onset times, metode pendeteksian menguji kemungkinan perubahan chord pada sebuah frekuensi spektrum tanpa mengidentifikasi nama notasi musik atau chord. Ide metode ini muncul dari observasi bahwa seorang pendengar yang tidak dapat mengidentifikasi nama-nama chord dapat merasakan perubahan chord.
Setiap chord change checkers memeriksa 2 jenis kemungkinan perubahan chord. Kemungkinan perubahan chord tersebut antara lain: kemungkinan pada quarter-note level dan yang lainnya pada eight-note level, dengan memotong spektrum frekuensi menjadi potongan-potongan pada beat-time sementara. Kemungkinan perubahan chord
pada setiap posisi quarter-note dan pada setiap eighth-note berdasarkan jumlah hipotesis posisi ketukan. Kemungkinan-kemungkinan perubahan dihitung dengan cara:
1. Memotong spektrum frekuensi menjadi potongan-potongan spektrum.
Spektrum frekuensi (daya spektrum) dihitung menggunakan Fast Fourier
Transform dan pendigitalan sinyal audio (Seperti yang telah dijelaskan pada bagian 2.4.1 Analisis Frekuensi). Dalam persiapan perhitungan kemungkinan perubahan chord
quarter-note , frekuensi spektrum dipotong menjadi potongan-potongan pada quarter-note time (beat time) :
{ | } (2.28)
merupakan beat time ke-n dan merupakan daya spektrum frekuensi pada waktu . Pada persiapan perhitungan kemungkinan perubahan chord eighth-note , spektrum dipotong menjadi potongan-potongan spektrum pada eighth-note time
yang diinterpolasikan dari :
| (2.29)
{ ( ) ( ) (2.30)
2. Membentuk histogram.
Sistem membentuk histogram dan (menggunakan abreviasi seperti ) dijumlahkan selama sumbu waktu pada potongan yang sesuai
dan :
∑
(2.31)
merupakan batas yang diajukan untuk menghindari pengaruh noise dan komponen frekuensi yang tidak stabil di sekitar awal notasi.
( ) (2.32) 3. Mendeteksi frekuensi dominan.
Puncak selama sumbu frekuensi dalam dihitung sebagai berikut:
{ (2.33)
Implementasi sistem hanya mempertimbangkan puncak frekuensi antara 10 Hz dan 1kHz. Puncak ini dapat dianggap sebagai frekuensi nada dominan dalam setiap potongan frekuensi dan cenderung cocok untuk komponen chord atau melodi. Puncak diatur menjadi , yang bernilai antara 0 dan 1. Untuk menghindari peningkatan puncak noise yang tidak perlu yang muncul selama periode silent seperti perhentian, sistem mengitung sebagai nilai relatif terhadap recent maximum dari
. Fungsi potongan digunakan setelah perkalian nilai relatif dengan gain ratio konstan sehingga nilai absolut puncak dominan cukup lebar.
(2.34) ( ( ) ) (2.35) { (2.36)
merupakan rasio atenuasi konstan yang menentukan seberapa lama pengaruh lokal maksimum sebelumnya, nilai recent maximum. Nilai dibatasi menjadi paling kecil bernilai 1 dan nilai dibatasi menjadi paling kecil bernilai 0 dan kurang dari 1. Nilai dan yang digunakan diatur menjadi dan . Puncak tertransformasi dalam setiap
potongan dihitung sehingga puncak sebelumnya dapat dianggap kontinyu selama periode silent relatif yang jumlah puncak-puncak rendah.
{
∑ ∑
(2.37)
SilentThres merupakan threshold konstan sebagai kriteria untuk periode silent dan diatur pada 0,1. Transformasi dibuatuntuk mencegah kemungkinan perubahan chord meningkat secara cepatsetelah periode silent.
4. Membandingkan frekuensi antara potongan yang berdekatan.
Kemungkinan perubahan chord dihitung dengan membandingkan puncak dengan potongan-potongan yang berdekatan dan . Ketika chord berubah pada batas waktu antara potongan-potongan tersebut, puncak cenderung berbeda dari ). Kemungkinan perubahan chord dihasilkan sebagai hasil normalisasi beda puncak positif . Dalam menormalisasi
menjadi jangkauan 0-1, sistem menghitung sebagai sebuah nilai yang
relatif terhadap recent maximum dari .
∑ ( ) (2.38)
(2.39)
Dengan demikian kemungkinan perubahan quarter-note dan kemungkinan perubahan eight note dapat dihitung sebagai berikut [6]:
(2.40)
2.7.2.3.Hypothesis manager
Hypothesis manager mengklasifikasikan seluruh hipotesis menjadi grup-grup berdasarkan beat time dan inter-beat interval. Hypothesis manager menyeleksi grup dominan yang paling handal. Kemudian, hypothesis manager mengulangi langkah pembagian grup dan melakukan tiga kali penyeleksian sambil menyempitkan batas beat
time. Hipotesis yang handal pada grup yang paling dominan dipilih sebagai keluaran sistem [6].
2.8.Teori Musik
Hubungan antara nada dengan frekuensi ditunjukkan oleh Tabel 2.2.
Tabel 2.2. Hubungan nada dengan frekuensi [30] Nada Frekuensi C4 261,63 Hz D4 293,66 Hz E4 329,63 Hz F4 349,23 Hz G4 392,00 Hz A4 440,00 Hz B4 493,88 Hz
Tempo merupakan kecepatan suatu lagu. Ketepatan kecepatan tempo diberikan sebagai M.M. (Maelzel’s metronome) yang setara dengan beats per minute (bpm) [31].
30
BAB III
RANCANGAN PENELITIAN
3.1.Perancangan Sistem
Sistem ini terdiri dari subsistem pengolahan sinyal audio (musik) dan subsistem pengendalian lampu. Subsistem pengolahan sinyal audio dilakukan dalam Raspberry Pi. Subsistem pengendalian lampu berupa driver LED. Selain itu, terdapat keyboard dan
mouse sebagai masukan Raspberry Pi serta monitor dan speaker sebagai keluaran Raspberry Pi. Tampilan visual pada monitor diberikan untuk memudahkan penyalaan dan pengoperasian sistem oleh pengguna. File musik diperdengarkan melalui speaker.
Gambar 3.1 Diagram blok sistem
Sinyal audio (musik) digunakan sebagai masukan sistem. Sinyal audio (musik) berupa file berekstensi wav diinputkan ke Raspberry Pi. File dipanggil sebagai data dan diolah menggunakan metode pengolahan sinyal. Hasil pengolahan sinyal audio berupa pendeteksian nada dan tempo. Pengolahan sinyal tersebut dilakukan menggunakan bahasa pemrograman Python. Dalam alat ini, nada yang terdeteksi digunakan untuk menentukan warna dan lama nyala lampu sedangkan pendeteksian tempo digunakan untuk menentukan terang redup lampu. Pengendalian warna dan terang redup nyala lampu dilakukan dengan memberikan sinyal Pulse Width Modulation (PWM) yang berbeda-beda pada driver LED.
Sinyal PWM dihasilkan oleh Raspberry Pi dan dikeluarkan melalui port GPIO.
Keyboard dan mouse dihubungkan dengan port USB pada Raspberry Pi. Monitor dihubungkan melalui port HDMI. Speaker terhubung dengan Raspberry Pi melalui mini
analog audio jack.
3.2.Perancangan Mekanik
Perancangan mekanik berupa perancangan desain wadah lampu. Wadah lampu berbentuk silinder dengan diameter 17 cm dan panjang silinder 12 cm. Keseluruhan wadah lampu terbuat dari aluminium. Wadah dirancang untuk LED sebanyak 18 buah yang terdiri dari 6 buah LED warna merah, 6 buah LED warna hijau, dan 6 buah LED warna biru. Gambar 3.2 menunjukkan gambar desain wadah lampu beserta ukurannya. Susunan posisi LED ditunjukkan pada gambar tampak depan oleh Gambar 3.3. Gambar 3.4 menunjukkan wadah lampu tampak samping kanan. Gambar 3.5 menunjukkan wadah lampu tampak samping kiri. Gambar 3.6 menunjukkan wadah lampu tampak belakang.
Gambar 3.3. Wadah lampu tampak depan
Gambar 3.5. Wadah lampu tampak samping kiri
3.3.Perancangan Perangkat Keras
Perangkat keras sistem berupa driver LED. Driver LED berupa regulator buck dengan masukan sinyal PWM sebagai pengatur pensaklaran regulator. Sinyal PWM berasal dari Raspberry Pi yang dikeluarkan melalui port GPIO.
3.3.1.Konfigurasi LED
Jumlah LED yang digunakan pada sistem ini sebanyak 18 buah, dengan rincian sebagai berikut: 6 buah LED warna merah, 6 buah LED warna hijau, dan 6 buah LED warna biru. Rangkaian LED dibagi menjadi 3 rangkaian berdasarkan warna. LED dirangkai secara seri. Tegangan total masing-masing rangkaian dihitung menggunakan persamaan 2.2. Kebutuhan tegangan untuk masing-masing rangkaian sebagai berikut:
1. Perhitungan total tegangan yang dibutuhkan rangkaian LED warna merah
Dalam dasar teori telah dibahas bahwa LED warna merah yang digunakan membutuhkan Forward Voltage ( ) sebesar 2,0 V sampai 2,8 V. Tegangan yang diberikan pada tiap LED sebesar 2,5 V. Tegangan total rangkaian LED warna merah:
(3.1) 2. Perhitungan total tegangan yang dibutuhkan rangkaian LED warna hijau dan biru
Dalam dasar teori telah dibahas bahwa LED warna merah yang digunakan membutuhkan Forward Voltage ( ) sebesar 3,0 V sampai 3,8 V. Tegangan yang diberikan pada tiap LED sebesar 3,5 V. Tegangan total rangkaian LED warna hijau dan biru:
(3.2) Rangkaian LED warna merah ditunjukkan oleh Gambar 3.7. Rangkaian LED warna hijau ditunjukkan oleh Gambar 3.8. Rangkaian LED warna biru ditunjukkan oleh Gambar 3.9.
Gambar 3.8. Rangkaian LED warna hijau
Gambar 3.9. Rangkaian LED warna biru
3.3.2.Regulator Tegangan
Regulator tegangan digunakan sebagai catu daya LED. Regulator dirancang agar mampu mengeluarkan tegangan yang berbeda-beda dan dapat diatur menggunakan Raspberry Pi. Tegangan yang berbeda-beda ini diperoleh dari pengubahan duty cycle sinyal pensaklaran regulator. Sinyal pensaklaran berupa sinyal Pulse Width Modulation (PWM) yang dihasilkan Raspberry Pi. Regulator diharapkan mampu menghasilkan arus sebesar 700mA dan tegangan untuk LED warna merah sebesar 0V s.d. 15V sedangkan tegangan untuk LED warna hijau dan biru sebesar 0V s.d. 21V.
Pada perancangan diguanakan trafo 3A dan 4 buah dioda 1N5402 sebagai rangkaian penyearah tegangan AC ke DC. Tegangan AC yang digunakan sebesar 220V/60Hz. Transformator digunakan untuk menurunkan tegangan 220V menjadi 30Vrms.
Rangkaian penyearah tegangan ditunjukkan pada Gambar 3.10.
Gambar 3.10. Rangkaian penyearah tegangan
Sebuah kapasitor filter dipasang pada setiap rangkaian driver LED. Mengacu pada persamaan 2.3, perhitungan nilai kapasitor untuk setiap driver LED:
Spesifikasi yang diharapkan berupa ripple kapasitor filter sebesar 3% dan tegangan sebesar 25V dengan sebesar 700mA.
(3.3) (3.4)
Kapasitor yang digunakan sebesar 2200μF (nilai standar terdekat dari 2240μF).
3.3.2.1.Regulator Linear
Tegangan keluaran transformator diubah menjadi tegangan dengan nilai tertentu menggunakan regulator linear dengan IC LM317. Arus yang diharapkan dari keluaran IC LM317 sebesar 700mA sehingga menggunakan IC LM317T [32]. Dalam menggunakan IC LM317, dilakukan perhitungan berdasarkan persamaan 2.4 sebagai berikut:
1. Perhitungan regulator IC LM317 untuk LED warna merah
Spesifikasi yang diharapkan berupa tegangan 16V dengan tegangan input sebesar 25V (berasal dari tegangan keluaran transformator).
( ) (3.5) Diberikan R2 sebesar 5,6kΩ. (3.6) Resistor R1 yang digunakan sebesar 470Ω (nilai standar terdekat dari 493,3Ω). Hasil
perancangan regulator linear untuk LED warna merah ditunjukkan oleh Gambar 3.11.
2. Perhitungan regulator IC LM317 untuk LED warna hijau dan biru
Spesifikasi yang diharapkan berupa tegangan 22V dengan tegangan input sebesar 25V (berasal dari tegangan keluaran transformator).
( ) (3.7) Diberikan R2 sebesar 5,6kΩ. (3.8) Resistor R1 yang digunakan sebesar 330Ω (nilai standar terdekat 346,71Ω). Hasil
perancangan regulator linear untuk LED warna hijau dan biru ditunjukkan oleh Gambar 3.12.
Gambar 3.12. Rangkaian regulator linear LED warna hijau dan biru
3.3.2.2.Regulator Switching
MOSFET IRF540 digunakan sebagai saklar pada regulator buck. On-off MOSFET diatur oleh sinyal PWM. Frekuensi sinyal PWM ditetapkan sebesar 100Hz. Dioda yang digunakan yaitu diode IN4002. Perhitungan nilai kritis induktor ( ) dan kapasitor ( ) pada regulator buck menggunakan persamaan 2.5 dan persamaan 2.6. Sebelum menentukan nilai induktor dan kapasitor terlebih dahulu dilakukan perhitungan penentuan
Perhitungan nilai induktor dan kapasitor diberikan:
1. Perhitungan nilai induktor dan kapasitor untuk LED warna merah
Spesifikasi yang diharapkan berupa tegangan 0V s.d. 15V dan arus 700mA.
(3.9) (3.10) (3.11) (3.12)
Induktor yang digunakan sebesar 10mH, nilai induktor standar terdekat yang lebih besar dari 6,7mH. Kapasitor yang digunakan sebesar 100μF, nilai kapasitor standar terdekat yang lebih besar dari 58,33μF. Hasil perancangan regulator switching untuk LED warna merah ditunjukkan oleh Gambar 3.14.
Gambar 3.13. Rangkaian regulator switching untuk LED warna merah
2. Perhitungan nilai induktor dan kapasitor untuk LED warna hijau dan biru Spesifikasi yang diharapkan berupa tegangan 0V s.d. 21V dan arus 700mA.
(3.13) (3.14) (3.15)
(3.16)
Induktor yang digunakan sebesar 10mH, nilai induktor standar terdekat yang lebih besar dari 6,82mH. Kapasitor yang digunakan sebesar 47μF, nilai kapasitor standar terdekat yang lebih besar dari 41,67μF. Hasil perancangan regulator switching untuk LED warna hijau dan biru ditunjukkan oleh Gambar 3.15.
Gambar 3.14. Rangkaian regulator switching untuk LED warna hijau dan biru
Hasil perancangan Driver LED ditunjukkan oleh Gambar 3.16. Masing-masing MOSFET dihubungkan dengan rangkaian gate drive MOSFET (GD1, GD2, GD3).
Penggunaan regulator tegangan linear bertujuan unuk menurunkan tegangan yang masuk ke regulator switching. Tegangan masukan regulator switching dijadikan mendekati spesifikasi keluaran regulator switching agar nilai induktor yang digunakan tidak terlalu besar. Tanpa menggunakan regulator linear, nilai induktor yang dibutuhkan adalah sebagai berikut (mengacu persamaan 2.5, persamaan 2.7, dan persamaan 2.8):
Tegangan input regulator (Vi) = 30V
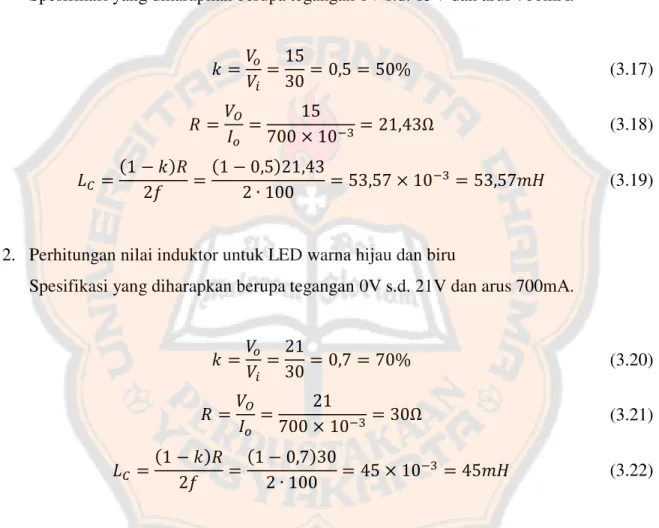
1. Perhitungan nilai induktor untuk LED warna merah
Spesifikasi yang diharapkan berupa tegangan 0V s.d. 15V dan arus 700mA.
(3.17) (3.18) (3.19) 2. Perhitungan nilai induktor untuk LED warna hijau dan biru
Spesifikasi yang diharapkan berupa tegangan 0V s.d. 21V dan arus 700mA.
(3.20) (3.21) (3.22)
Perbandingan kebutuhan induktor dengan regulator linear dan tanpa regulator linear ditunjukkan oleh Tabel 3.1.
Tabel 3.1.Perbandingan kebutuhan induktor
Rangkaian LED Nilai induktor yang dibutuhkan
Menggunakan regulator linear Tanpa regulator linear
Warna merah 6,70mH 53,57mH
Dari hasil perbandingan kebutuhan induktor dengan regulator linear dan tanpa regulator linear, nilai induktor yang dibutuhkan rangkaian dengan regulator linear jauh lebih kecil daripada nilai induktor yang dibutuhkan rangkaian tanpa regulator linear. Perancangan rangkaian driver LED yang digunakan dalam penelitian ini yaitu perancangan dengan menggunakan regulator linear karena membutuhkan nilai induktor yang lebih kecil.
3.3.3.Gate Drive MOSFET
Gate drive MOSFET membutuhkan sumber tegangan sebesar 12V. Sumber tegangan rangkaian gate drive MOSFET berasal dari keluaran regulator linear menggunakan IC LM317. Sumber tegangan regulator linear berasal dari tegangan keluaran trafo sebesar 30V. Sebuah kapasitor filter dipasang pada rangkaian gate drive MOSFET. Perhitungan nilai kapasitor untuk regulator linear sebagai sumber tegangan gate drive MOSFET dihitung berdasarkan persamaan 2.3 sebagai berikut:
Spesifikasi yang diharapkan berupa ripple kapasitor filter sebesar 3% dan tegangan sebesar 20V dengan sebesar 100mA.
(3.23) (3.24)
Kapasitor yang digunakan sebesar 470μF (nilai standar terdekat dari 400μF).
Perhitungan perancangan regulator linear sebagai sumber tegangan gate drive MOSFET berdasarkan persamaan 2.4 sebagai berikut:
Spesifikasi yang diharapkan berupa tegangan 12V.
( ) (3.25) Diberikan R2 sebesar 8,2kΩ. (3.26) Resistor R1 yang digunakan sebesar 1kΩ (nilai standar terdekat dari 1,032 kΩ). Hasil
perancangan regulator linear sebagai sumber tegangan gate drive MOSFET ditunjukkan oleh Gambar 3.13.
Gambar 3.16. Rangkaian regulator linear sebagai sumber tegangan gate drive MOSFET
Rangkaian gate drive MOSFET yang digunakan yaitu rangkaian totem pole terisolasi optis. Rangkaian ini menggunakan transistor NPN 2N2222A dan transistor PNP 2N2907A. Optocoupler yang digunakan yaitu optocoupler CNY17-4. Sumber tegangan berasal dari regulator linear sebesar 12 V. Gambar 3.17 menunjukkan gambar perancangan rangkaian gate drive MOSFET. Gambar 3.18 menunjukkan keseluruhan rangkaian gate
drive MOSFET.
![Gambar 2.13. Penguraian komponen onset [29]](https://thumb-ap.123doks.com/thumbv2/123dok/4208022.3105012/36.893.126.787.118.882/gambar-penguraian-komponen-onset.webp)
![Gambar 2.14. Relasi onset-time vectorizer, agen-agen, dan chord change checkers [6]](https://thumb-ap.123doks.com/thumbv2/123dok/4208022.3105012/37.893.130.787.453.927/gambar-relasi-onset-time-vectorizer-chord-change-checkers.webp)