Abstrak— Penelitian ini membahas pengaruh beban nonlinier terhadap susut daya generator sinkron dan membuat batasan pembebanan generator sinkron pada beban nonlinier. Arus generator tidak sinusoidal saat generator memasok beban nonlinier. Harmonisa orde ketiga dan kelipatannya akan mendominasi pertambahan susut daya generator. Susut daya tambahan yang dimaksud adalah susut daya tembaga tambahan akibat terimbasnya arus harmonisa di rangkaian rotor.
Kata Kunci—harmonisa, generator sinkron, nonlinier, susut daya.
I. PENDAHULUAN
Hampir semua industri komersial menggunakan pembangkit energi elektrik sendiri untuk menjaga kontinuitas produksi. Penggunaan energi cadangan ini dilakukan dengan pertimbangan bahwa risiko yang harus ditanggung akibat terputusnya pasokan daya akan lebih besar daripada pengeluaran untuk penyediaan energi cadangan.
Pembangkit energi elektrik sendiri umumnya menggunakan mesin diesel sebagai penggerak mulanya dan terhubung langsung ke pusat beban. Konfigurasi yang umum digunakan pada pembangkit energi elektrik sendiri adalah sistem tiga fasa empat kawat. Beban nonlinier seperti perangkat komputer, sistem audio-video, UPS, dan perangkat elektronika lainnya akan mendistorsi arus generator.
Untuk mengetahui kinerja generator pada beban nonlinier diperlukan analisis mengenai susut daya tambahan akibat arus beban yang tidak sinus. Beberapa literatur melakukan analisis susut daya generator sinkron akibat beban nonlinier, tetapi informasi yang diberikan belum mencukupi untuk membuat pedoman pembebanan generator sinkron pada kondisi beban nonlinier. Dalam makalah ini penulis mencoba melakukan pendekatan analitis terhadap rugi-rugi generator sinkron dan melakukan percobaan untuk memperoleh rugi-rugi generator pada beban nonlinier.
II. IDENTIFIKASI IMPEDANSI GENERATOR SINKRON
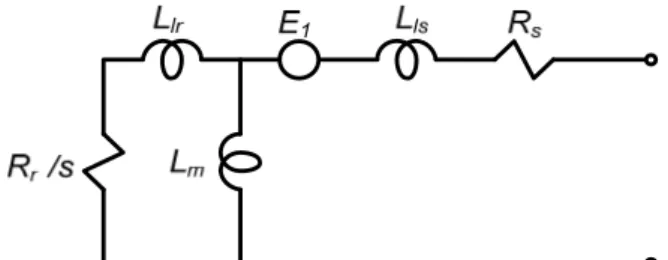
Untuk dapat melakukan analisis rugi-rugi generator sinkron, perlu diketahui impedansi generator. Rangkaian pengganti umum mesin arus bolak-balik ditunjukkan pada Gambar 1.
Gambar 1. Rangkaian pengganti umum mesin arus bolak-balik. Parameter yang terdapat pada rangklaian pengganti mesin arus bolak-balik adalah gaya gerak elektrik E1,
resistansi stator Rs, resistansi rotor Rr, induktansi
magnetisasi Lm, induktansi bocor stator Lls, induktansi
bocor rotor Llr, dan slip s. Slip merupakan perbedaan
relatif putaran medan stator dengan putaran rotor [1]. Secara matematis slip didefinisikan pada persamaan (1).
s r s
s
ω
ω
ω
−
=
(1) dengan ωs adalah putaran medan stator dan ωr adalahputaran rotor.
Putaran medan stator sama dengan putaran rotor untuk komponen fundamental arus sehingga s bernilai nol. Apabila s bernilai nol maka nilai Rr/s bernilai tak
hingga. Rangkaian pengganti komponen fundamental ditunjukkan pada Gambar 2. Untuk memperoleh resistansi generator pada frekuensi fundamental dilakukan pengukuran langsung terhadap belitan stator dengan menggunakan miliohmeter dan diperoleh nilai resistansi stator sebesar 1.697 ohm.
Pada kondisi beban nonlinier timbul harmonisa pada arus. Fourier menyatakan bahwa gelombang periodik non-sinusoidal dapat diuraikan dalam bentuk penjumlahan gelombang fungsi sinus yang terdiri dari komponen gelombang sinus fundamental dan sejumlah tak hingga komponen harmonisa [2]. Dengan menggunakan analisis fourier maka persamaan arus beban masing-masing fasa dapat ditulis sebagai berikut :
∑
==
~ 1cos
h t hm RI
h
I
ω
(2))
120
(
cos
~ 1−
=
∑
= h t hm SI
h
I
ω
(3))
120
(
cos
~ 1+
=
∑
= h t hm TI
h
I
ω
(4)Analisis Susut Daya Generator Sinkron
Pada Beban Nonlinier
Dadan Nurafiat/13204210
Sekolah Teknik Elektro dan Informatika, Institut Teknologi Bandung Jalan Ganesha 10 Bandung
dengan h adalah orde harmonisa dan
I
hm adalah nilai maksimum harmonisa orde ke h.Arus harmonisa tersebut dapat diuraikan menjadi komponen harmonisa urutan positif, negatif, dan nol.
• Harmonisa dengan orde h = 3n-2 adalah harmonisa urutan positif
• Harmonisa dengan orde h = 3n-1 adalah harmonisa urutan negatif
• Harmonisa dengan orde h = 3n adalah harmonisa urutan nol
dengan n adalah bilangan bulat.
Bagi setiap gelombang harmonisa ini, rotor berputar pada kecepatan sinkron. Pada harmonida arus urutan positif dan negatif, impedansi rangkaian rotor jauh lebih kecil dibandingkan dengan impedansi magnetisasi sehingga impedansi magnetisasi dapat diabaikan. Rangkaian pengganti generator sinkron untuk urutan positif dan negatif ditunjukkan pada Gambar 3.
Untuk harmonisa urutan nol dianggap tidak ada induksi di rotor sehingga hanya tahanan stator dan reaktansi bocor stator yang perlu diperhitungkan. Rangkaian pengganti generator sinkron untuk urutan nol ditunjukkan pada Gambar 4.
Untuk memperoleh impedansi urutan positif dan negatif dilakukan pengujian arus urutan negatif dan positif. Gambar 5 menunjukkan rangkaian pengujian arus urutan positif dan negatif. Berdasarkan hasil pengujian injeksi arus urutan positif dan negatif diperoleh resistansi urutan positif dan negatif seperti ditunjukkan Gambar 6.
Gambar 2. Rangkaian komponen fundamental.
Gambar 3. Rangkaian pengganti urutan positif dan negatif.
Gambar 4. Rangkaian pengganti urutan nol.
Gambar 5. Rangkaian pengujian arus urutan positif dan negatif
0 1 2 3 4 5 6 7 2 4 5 7 8 10 11 13 orde harmonisa resi st an si ( o h m )
Gambar 6. Grafik resistansi urutan positif dan negatif terhadap orde harmonisa
Impedansi urutan nol diperoleh dengan melakukan pengujian arus urutan nol. Secara umum metoda yang digunakan untuk memperoleh impedansi urutan nol hampir sama dengan penentuan impedansi urutan positif dan negatif. Gambar 7 menunjukkan rangkaian pengujian arus urutan nol.
Berdasarkan hasil pengujian injeksi arus urutan nol, diperoleh resistansi urutan nol seperti ditunjukkan Gambar 8. Dari grafik resistansi terhadap orde harmonisa dapat dilihat bahwa nilai resistansi meningkat apabila frekuensi meningkat. Hal ini terjadi akibat adanya skin effect [3].
Gambar 7. Rangkaian pengujian urutan nol.
0 1 2 3 4 5 6 7 8 9 3 6 9 12 orde harmonisa resi st an si ( o h m )
III. RUGI-RUGI GENERATOR SINKRON
Daya mekanik yang masuk ke generator tidak dapat sepenuhnya diubah menjadi daya elektrik [1]. Perbedaan daya tersebut merupakan rugi-rugi generator sinkron. Rugi-rugi generator sinkron terdiri dari :
• Rugi-rugi gesekan dan angin (Pf&w)
• Rugi-rugi inti(Pcore)
• Rugi-rugi tembaga(Pcopper)
• Rugi-rugi stray(Pstray)
Rugi-rugi generator tersebut dikelompokkan menjadi dua bagian, yaitu rugi-rugi tetap dan rugi rugi berubah. Rugi-rugi generator yang tergolong rugi-rugi tetap adalah rugi-rugi inti dan rugi-rugi angin dan gesekan. Rugi-rugi inti dan rugi-rugi gesekan dan angin bisa disebut juga no load rotational loss (PRL). Jika generator
sinkron tanpa beban diputar pada putaran nominalnya dan diberi eksitasi sampai tegangan nominalnya, maka seluruh daya yang masuk ke generator sinkron digunakan untuk mengatasi rugi-rugi angin dan gesekan dan rugi-rugi inti. Rugi-rugi berubah terdiri dari tugi-rugi tembaga dan rugi-rugi stray. Kedua rugi-rugi ini berubah seiring dengan berubahnya beban.
Rugi-rugi gesekan dan angin timbul akibat gesekan bantalan dan sikat. Karena kecepatan putaran generator sinkron tetap maka rugi-rugi ini bernilai tetap. Rugi-rugi inti terdiri dari rugi-rugi hysterisis dan arus pusar. Untuk mengurangi rugi-rugi hysterisis, dipilih logam inti yang memiliki luas area hysterisis loop yang kecil. Rugi-rugi arus pusar dapat diperkecil dengan membentuk inti berupa lapisan tipis yang terisolasi satu sama lainnya [4].
Rugi-rugi tembaga merupakan rugi-rugi akibat pemanasan pada kumparan tembaga. Rugi-rugi yang tidak termasuk ke dalam ketiga tugi-rugi yang telah dibahas dikelompokkan kedalam rugi-rugi stray. Gambar 9 menunjukkan diagram aliran daya pada generator sinkron.
Apabila generator sinkron memasok beban linier maka tidak ada harmonisa yang timbul. Arus yang mengalir pada stator hanya memiliki komponen fundamental saja. Rugi-rugi tembaga generator sinkron pada kondisi beban linier dituliskan pada persamaan (5).
2 1 1
3
copperP
=
I R
(5) dengan I1 adalah komponen fundamental arus dan R1adalah resistansi pada frekuensi fundamental.
Gambar 9. Diagram aliran daya pada generator sinkron.
Rugi-rugi tembaga generator sinkron pada kondisi beban nonlinier dituliskan pada persamaan (6).
2 1
3
co pp er h h hP
∞I R
== ⋅
∑
(6) Dengan Ih harmonisa orde ke-h dan Rh adalah resistansigenerator pada harmonisa orde ke-h. IV. EXPERIMEN PEMBEBANAN
Eksperimen pembebanan dilakukan dengan menggunakan generator sinkron 6 kW, 3 fasa, 380/220 V. Sebagai penggerak mula digunakan motor DC. Rugi-rugi generator sinkron secara matematis dituliskan pada persamaan (7).
RL copper stray
P P
=
+
P
+
P
(7) Rugi-rugi stray (Pstray) bergantung pada daya keluarangenerator. Pada makalah ini Pstray bernilai 2,5% dari
daya keluaran generator [5]. A. Eksperimen Pembebanan linier
Rangkaian eksperimen pembebanan linier dilukiskan seperti pada Gambar 10. Beban generator yang digunakan adalah resistor vaiabel dengan kapasitas maksimum 4000 watt. Rugi-rugi total generator sinkron pada kondisi beban linier ditunjukkan pada persamaan (8).
2
1 1
0.025
RL load
P P
=
+
I R
+
P
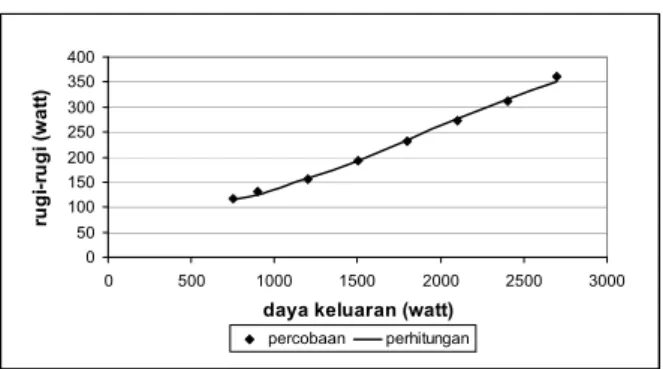
(8) Pada Gambar 11 ditampilkan kurva rugi-rugi generator sinkron terhadap daya keluaran generator sinkron pada pembebanan linier. Kurva tersebut menunjukkan perbandingan antara rugi-rugi generator hasil perhitungan dengan hasil eksperimen. Hasil ini menunjukkan bahwa metoda analisis yang digunakan cukup akurat.Gambar 10. Rangkaian eksperimen pembabanan linier.
0 50 100 150 200 250 300 0 500 1000 1500 2000 2500 3000
daya keluaran (watt)
ru g i-ru g i (w a tt) percobaan perhitungan
Gambar 11. Perbandingan rugi-rugi hasil eksperimen dan perhitungan pada beban linier.
B. Eksperimen Pembebanan nonlinier
Pada experimen pembebanan nonlinier generator dibebani dengan penyearah full bridge satu fasa, kapasitor 3300 µC, induktor 5mH, dan resistor variabel. Rangkaian eksperimen pembebanan nonlinier ditunjukkan pada gambar 12. Untuk memperoleh data arus harmonisa digunakan harmonic analyzer.
Rugi-rugi total generator sinkron pada kondisi beban nonlinier adalah: 2 1
0.025
RL h h load hP P
∞I R
P
==
+
∑
+
(9)Perbandingan rugi-rugi generator hasil eksperimen pembabanan nonlinier dan hasil perhitungan ditunjukan pada Gambar 13. Sekali lagi hasil ini menunjukkan bahwa metoda analisis yang digunakan cukup akurat.
Perbandingan rugi-rugi geneator pada beban linier dengan rugi-rugi generator pada beban nonlinier diperlihatkan pada Gambar 14. Dari kurva perbandingan dapat kita ketahui bahwa pada daya terpasang yang sama, rugi-rugi generator yang memasok beban nonlinier lebih besar daripada rugi-rugi generator yang memasok beban linier.
Gambar 12. Rangkaian eksperimen pembabanan nonlinier.
0 50 100 150 200 250 300 350 400 0 500 1000 1500 2000 2500 3000
daya keluaran (watt)
ru gi -r u g i ( wat t) percobaan perhitungan
Gambar 13. Kurva perbandingan rugi-rugi hasil eksperimen dan perhitungan pada beban nonlinier.
0 50 100 150 200 250 300 350 400 0 500 1000 1500 2000 2500 3000
daya keluaran (watt)
ru g i-r u g i (w a tt) nonlinier linier
Gambar 14. Kurva perbandingan rugi-rugi generator sinkron pada beban linier dengan nonlinier
V. SUSUT DAYA GENERATOR DAN THDARUS
Salah satu parameter yang menunjukkan besarnya distorsi gelombang adalah Total Harmonic Distortion (THD) [2]. Komponen distorsi dari arus adalah :
1/ 2 1/ 2 2 2 2 1 1 dis h h
I
I
I
I
≠⎛
⎞
⎡
⎤
=
⎣
−
⎦
= ⎜
⎟
⎝
∑
⎠
(10)dengan I adalah nilai rms arus yang terdistorsi dan I1
adalah komponen fundamental arus. THD arus memiliki definisi sebagai berikut :
1
%
THD
100
I
disI
=
×
(11) 2 2 1 1%
THD
100
I
I
I
−
=
×
(12) 2 1 1%
100
h hI
THD
I
≠⎛ ⎞
=
×
⎜ ⎟
⎝ ⎠
∑
(13) Karena generator sinkron pada dasarnya hanya membangkitkan GGE fundamental, maka seluruh daya yang dibangkitkan haruslah berasal dari komponen fundamental saja [6]. Perbandingan komponen fundamental arus pada beban nonlinier dengan beban linier dapat digunakan sebagai derating factor. Derating factor merupakan faktor yang menunjukkan penurunan pembebanan generator dari nilai nominalnya. Rugi-rugi tembaga tembaga secara umum ditulisan pada persamaan (14). 2 2 1 1 2 losses h h hP
I R
∞I R
==
+
∑
(14) Apabila kita substitusikan persamaan (10) ke persamaan (14) diperoleh persamaan rugi-rugi tembaga seperti pada persamaan (15). 2 2 1 1 copper dis hP
=
I R
+
I R
(15) Substitusi persamaan (11) ke persamaan (15) menghasilkan persamaan (16). 2 2 2 1 1 1 copper hP
=
I R THD I R
+
(16)(
)
2 2 1 1 copper hP
=
I
R
+
THD R
(17) 1 2 1 copper hP
I
R THD R
=
+
(18)Dari persamaan (18) dapat diketahui nilai komponen fundamental arus bagi setiap nilai THD untuk nilai rugi-rugi tembaga tertentu.
Pada beban linier komponen fundamental arus dituliskan pada persamaan (19).
1 1 copper L
P
I
R
=
(19) Perbandingan komponen fundamental arus pada beban nonlinier dan linier dituliskan pada persamaan (20).1 1
2 1L 1 h
I
R
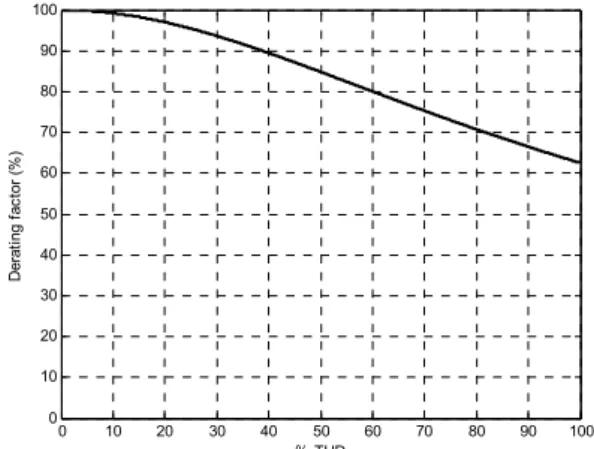
Persamaan (20) merumuskan derating factor. Pada Gambar 15 ditunjukkan kurva pembebanan generator pada beban nonlinier terhadap nilai THD.
0 10 20 30 40 50 60 70 80 90 100 0 10 20 30 40 50 60 70 80 90 100 % THD D er ati ng fa ct or ( % )
Gambar 15. Kurva derating factor terhadap THD. VI. KESIMPULAN
Kesimpulan yang dapat diperoeh dari penelitian ini adalah
1. Pada sistem tiga-fasa empat-kawat, harmonisa didominasi oleh harmonisa ketiga dan kelipatannya. Harmonisa arus orde ketiga dan kelipatannya akan menambah rugi-rugi tembaga generator sinkron pada beban nonlinier
.
2. Untuk mengetahui rugi-rugi generator, perlu informasi yang tepat mengenai parameter generator sinkron pada kondisi beban nonlinier.
3. Dari kurva derating faktor dapat diketahui pembebanan generator uji disarankan sebesar 81.05% dari beban nominalnya pada nilai THD arus sebesar 50%.
REFERENSI
[1] Chapman, Stephen J., “Electric Machinery Fundamentals”, Singapore : McGraw-Hill,Inc, 1985.
[2] Mohan, Undeland, and Robbins, “Power Electronics Converter, Application and Design”,John Wiley and Sons, Inc., 2003.
[3] Hayt, Jr.,William H., “Engineering Electromagnetics”, Singapore : McGraw-Hill,Inc, 1989.
[4] Gupta, J. B., “Theory and Performance of Electrical Machines”, S. K. Kataria & Sons., 2004.
[5] Asko Parviainen, ” Design of Axial-Flux Permanent-Magnet Low-Speed Machines and Performance Comparison Between Radial-Flux and Axial Flux”, Lappeenranta 2005.
[6] Qamaruzzaman, “Identifikasi Parameter Generator Sinkron yang Dibebani dengan Penyearah”, SENATRIK 2004.