PENGEMBANGAN PURWARUPA ROBOT PEMADAM API DENGAN KENDALI BERBASIS MIKROKONTROLER
Mochammad Safarudin1, Abdul Patah2
Teknik Mesin, Sekolah Tinggi Teknologi Mandala Bandung
Abstact
Since the last few decades, the role of robots in industry and daily life is increasing, fire fighting robots are autonomous ground vehicles that are widely designed for research, industry and robot competition, as the name suggests the task of this robot is to detect the presence of flames in a room and then extinguish them, The process of finding fire points using flame sensors, servo motors are used as wheel drive motors and fan modules as fire extinguishers. Microcontrolles used are microcontrolle atmega32 board arduino Uno R3 as robot control and arduino nano as location detection program, GPS module as location detector, ultrasonic sensor as obstruction detector and sim module 800 l as sending media location coordinate point. The research method used is Research and Development which is often interpreted as a process or steps to develop a new product or improve an existing product. Software used for robot programming using arduino IDE 1.8 application. The robot is designed to have three wheels, two rear wheels and one wheel in the front center, for the frame material uses solid acrylic black color with a thickness of 3 mm, the main frame length is 18 cm and width of 4 cm, the size of the wheel diameter and tire is 8 cm, the height of the sensor buffer is 7 cm and the width is 2 cm, for the track size has a width of 25 cm and a wall height of 15 cm , the height of the candle is 10 cm and the distance between the candle and the wall is 4 cm. The approach used is quantitative with experimental research methods. at the experimental stage of the control variables (inputs) to analyze the resulting output. In this Final Task, percompponent testing is performed to ensure the components run according to their functionality and overall testing. The result of this study is a fire extinguishing robot that can move automatically avoiding obstacles and equipped with gps systems.
Keywords : Robot Pemadam Api, Ultrasonik, Flame, Arduino Uno, Arduino Nano, Atmega328P
Abstrak
Sejak beberapa dekade terakhir ini, peran robot dalam industri maupun kehidupan sehari-hari semakin meningkat,robot pemadam api adalah kendaraan darat otonom yang banyak dirancang untuk penelitian, industri maupun kompetisi robot, sesuai namanya tugas robot ini adalah mendeteksi adanya nyala api dalam sebuah ruangan lalu memadamkannya, Proses pencarian titik api menggunakan flame sensor, motor servo digunakan sebagai motor penggerak roda dan modul kipas sebagai pemadam api. Mikrokontroller yang digunakan adalah mikrokontroller atmega32 board arduino Uno R3 sebagai kontrol robot dan arduino nano sebagai program pendeteksi lokasi , modul GPS sebagai pendeteksi lokasi, sensor ultrasonic sebagai pendeteksi halangan dan modul sim 800 l sebagai media pengirim titik koordinat lokasi. Metode penelitian yang digunakan adalah Research and Development yang sering diartikan sebagai suatu proses atau langkah-langkah untuk mengembangkan suatu produk baru atau menyempurnakan produk yang telah ada. Software yang digunakan untuk pemrograman robot menggunakan aplikasi arduino IDE 1.8. Robot yang dirancang memiliki tiga roda, dua roda belakang dan satu roda dibagian tengah depan , untuk bahan rangka menggunakan akrilik solid warna hitam dengan tebal 3 mm, panjang rangka utama 18 cm dan lebar 4 cm , ukuran diameter roda dan ban 8 cm, tinggi penyangga sensor 7 cm dan lebarnya 2 cm, untuk ukuran lintasan memiliki lebar 25 cm dan tinggi dinding 15 cm, tinggi lilin 10 cm serta jarak antara lilin dan dinding 4 cm. Pendekatan
eksperimen terhadap variabel-variabel kontrol (input) untuk menganalisis output yang dihasilkan. Dalam Tugas Akhir ini dilakukan pengujian perkomponen untuk memastikan komponen berjalan sesuai fungsinya dan pengujian keseluruhan. Hasil penelitian ini adalah sebuah robot pemadam api yang dapat bergerak secara otomatis menghindari halang rintang dan dilengkapi dengan sistem gps.
Kata Kunci : Robot Pemadam Api, Ultrasonik, Flame, Arduino Uno, Arduino Nano, Atmega328P
1. PENDAHULUAN
Sejak beberapa dekade terakhir ini, peran robot dalam industri maupun kehidupan sehari-hari semakin meningkat, hal ini sesuai dengan kemajuan teknologi saat ini, Hampir tidak ada cabang industri teknologi tinggi yang tidak dibantu robot. Dalam kehidupan sehari-hari, berbagai bentuk robot diciptakan untuk membantu atau memudahkan aktivitas manusia. Berbagai bentuk robot diciptakan Banyak robot industrial yang bentuknya hanya seperti lengan mekanis. Atau robot rumah tangga untuk membersihkan lantai, yang bentuknya hanya seperti cakram.
Semakin berbahaya pekerjaan di sebuah industri maupun kehidupan sehari-hari, pemanfaatan alat bantu robot makin tidak dapat dihindarkan, Banyak pembuat dan pengembang robot yang berlomba-lomba dalam melakukan
pengembangan terutama
mengembangkan kecanggihan teknologi yang sudah ada guna memudahkan pekerjaan. Selain memudahkan pekerjaan, tentunya faktor keamanan sangat perlu diperhatikan. Pada dasarnya kecanggihan teknologi yang sangat dibutuhkan yaitu kecanggihan teknologi yang memiliki manfaat yang besar serta keamanan yang terjamin.
Salah satu perkembangan teknologi adalah robot, robot telah dikembangkan untuk dapat membantu manusia dalam melakukan pekerjaan , berbahaya dan
memerlukan ketepatan. pekerjaan tersebut misalnya memadamkan api dibangunan yang strukturnya tidak stabil sehingga sewaktu-waktu dapat runtuh, dengan menggunakan robcot, pekerjaan tersebut dapat dilakukan tanpa mengancam nyawa petugas pemadam kebakaran.
2. METODEPENELITIAN
2.1 Perancangan dan Pembuatan Robot
Perancangan robot ini dirancang untuk memadamkan api dengan jenis robot beroda, yaitu robot mobil yang menggunakan servo dan dijalankan menggunakan Arduino dan sensor. Perancangan dan pembuatan robot ini disusun melalui beberapa tahapan mulai dari disain robot sampai dengan tahap pemrograman. Gambar di bawah ini merupakan prototype dari desain keseluruhan robot pemadam api yang dibuat.
Gambar 1 Prototype desain keseluruhan robot
Subyek penelitian ini adalah robot beroda yang mempunyai kemampuan meng ekplorasi suatu tempat. Robot didesain memiliki dua roda kendali dan satu roda bebas dengan kendali dua buah motor Servo 3600. Sistem kerja
dalam usaha menemukan target yaitu api lilin, robot ini bisa menghindari halangan dengan berbelok ke kanan, dan berbelok ke kiri. Sistem kerja robot ini akan deprogram dengan mikrokontroler Arduino.
Sistem Kontrol Sistem kendali robot beroda ini dilengkapi dengan 2 buah mikrokontroller. Masing masing mikrokontroller memiliki fungsi dan tugas yang berlainan seperti otak manusia. Mikrokontroler 1 bertugas sebagai pengendali 2 buah motor servo penggerak kaki robot dan pemindai (sensor) seperti pemindai jarak (Ultrasonik), pemindai cahaya (Flame
Sensor), pemindai tracking line (Sensor
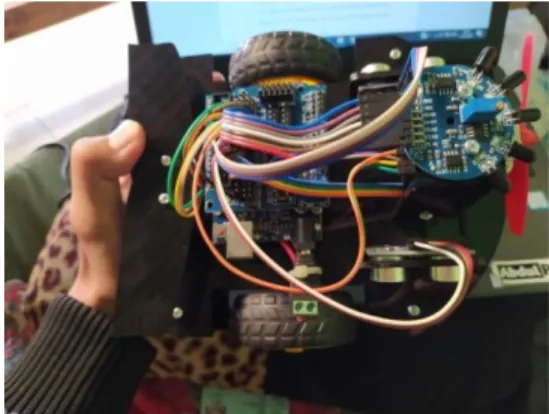
garis) buzzer dan modul kipas, Mikrokontroler 2 bertugas sebagai pemindai lokasi dan mengirimkanya melalui SMS menggunakan modul sim800L. Semua mikrokontroler yang digunakan adalah arduino jenis Uno dan nano seperti yang diperlihatkan pada gambar berikut:
Gambar 2 Mikrokontroler
2.2 Spesifikasi Teknis
Mengacu pada tujuan Tugas akhir ini, spesifikasi teknis akan dibuat yaitu Robot pencari sumber api, dengan flame sensor 5 channel, Modul GPS dan Modul Sim 800L yang akan mengirimkan Link Maps lokasi robot melalui SMS. Berikut ini adalah spesifikasi alat :
Servo mg995 Arduino Uno Arduino Nano
Baterai lippo 1000mah Sensor ultrasonic hc-sr04 Sensor api 5 channel Step Down DC Converter Buzzer 5v
Modul GPS Neo Ublox 6m Modul Sim 800L V2
Modul fan l9110 Sensor tcr 5000 2.3 Kerangka Berpikir
Rancangan dalam robot pemadam api menggunakan mikrokontroler arduino secara umum dibagi menjadi beberapa rancangan, yaitu rancangan perangkat keras (hardware) atau system rangkaian elektronik yang berfungsi membaca pergerakan robot dan rancangan perangkat lunak berupa program yang berfungsi untuk menampilkan informasi maupun mengirimi informasi keperangkat mobile. Perlu adanya kerangka atau perancangan sebelum melakukan pembuatan system baik dari sisi perangkat keras maupun perangkat lunak berupa program
Sistem kerja robot pemadaam api dapat dilihat pada gambar di bawah ini.
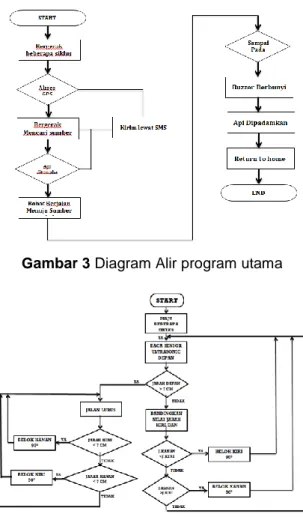
Gambar 3 Diagram Alir program utama
Gambar 4 Diagram Alir program navigasi
Diagram alir program Program utama dari robot pemadam api yaitu saat saklar dihidupkan maka yang pertama dibaca oleh program yaitu sensor ultrasonic. Pada program pembacaan sensor ultrasonic, pembacaan dilakukan secara bergantian dari penulisan yang paling atas. Flowchart Program Utama Robot Pemadam Api ditampilkan pada Gambar3.
Program untuk pengaturan gerak robot menyusuri ruang berlandaskan pada informasi jarak dari sensor ultrasonik. Setelah nilai jarak didapatkan dari tiga buah sensor ultrasonik maka tiga buah nilai jarak akan dibandingkan
akan berjalan. Pembacaan sensor yang untuk menentukan langkah robot yaitu dengan membaca sensor ultrasonik yang paling depan baru membandingkan jarak samping kiri dan samping kanan.(Gambar 4)
2.5 Perancangan Perangkat Keras Pembuatan perangkat keras (hardware) sendiri terdiri dari pembuatan rangkaian secara skematik yaitu koneksi Arduino uno dengan modul Flame sensor, Arduino uno dengan modul DC-DC Conveter, Arduino uno dengan modul kipas, Arduino Uno dengan Buzzer, Arduino Uno dengan sensor ultrasonic, serta Arduino Nano dengan modul GPS dan Arduino Nano dengan Modul Sim 800L. Berikut diagram rangkaian keseluruhannya.
Gambar 5 Rangkaian Keseluruhan Robot
Gambar diatas merupakan rangkain keselurahan alat mikrokontroller yang sudah jadi, nantinya menjadi Robot pemadam api.
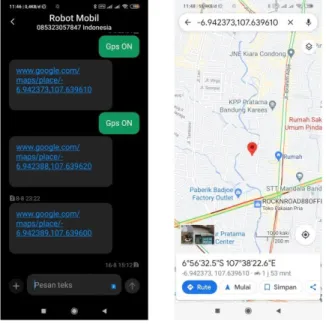
Robot ini juga dilengkapi sistem GPS yang dapat diakses melalui SMS berikut format sms dan pengecekan lokasi menggunakan google maps.
Gambar 6 Format sms dan cek lokasi robot
3. HASILDANPEMBAHASAN
Robot ini yang didesain untuk dapat menghindari halang rintang dan dapat memadamkan api lilin. Robot ini merupakan prototipe dari robot pemadam api.
Robot ini dirancang menggunakan mikrokontroler ATmega328 dan ATmega328P dilengkapi dengan motor servo 3600 sebagai penggerak roda dan sensor api sebagai sensor yang mendeteksi adanya api serta sensor ultrasonik sebagai sensor penghalang yang membaca dinding sebagai jalur robot.
Gambar 7 Proses pemadaman api lilin
3.1 Pengujian Robot
Untuk memulai pemrograman robot ini menggunakan software pemrograman mikrokontroler yang biasa disebut Arduino IDE. Untuk memudahkan dalam pengoperasian robot dibuat program dengan bahasa mengacu pada kehidupan sehari-hari, seperti kanan, kiri, lurus, berhenti, kipas.
Tabel 1 Hasil Pengujian Implementasi
3.2 Downloading (memasukkan program ke robot)
Untuk proses downloading, cara download ke mikrokontroler membutuhkan beberapa piranti baik yang berbentuk hardware maupun software. Dibutuhkan hardware sebagai penghubung dan sekaligus media transfer program dari Arduino IDE ke robot yang berbentuk USB atau yang biasa kita sebut USB Downloader atau USBAsp. Berikut contoh program yang dimasukan.
Pada bagian akhir tulisan ini kesimpulan yang diperoleh didasarkan pada rumusan masalah yang dilandasi hasil penelitian berdasarkan hasil pengembangan dan juga hasil pengujian didapatkan :
4.1 Kesimpulan
Prototype Robot Pemadam Api dapat memadamkan api dengan Baik sesuai dengan program yang telah diberikan ke Arduino Uno.
Robot ini cocok digunakan untuk memadamkan api yang kecil.
Sebagai output atau keluaran sim 800 L bertugas mengirimkan kode lokasi yang didapat dari modul GPS neo Ublox 6m melalui sms.
Robot akan kembali ke tempat semula jika api telah dipadamkan
4.2 Saran
Sebaiknya pemilihan jenis komponen dan alat yang tepat harus lebih di pertimbangkan karena akan menentukkan cara kerja robot.
Harus adanya pengembangan lebih lanjut untuk menyempurnakan robot tersebut. Misalnya dengan penggantian modul sim 800 L dan Neo Ublox 6m ke versi yang lebih tinggi atau bisa juga dengan menambahan modul kamera.
Jika ingin menerapkan dalam dunia nyata maka diperlukan penyesuaian kembali dalam bentuk layar demi kesempurnaan dan fungsi robot tersebut di dunia nyata.
Sebaiknya hindari penggunaan robot di luar ruangan karena sensor api sangat sensitif terhadap cahaya matahari.
Muhammad Yasyfi., Elang Derdian Mamdani, ST. MT., Muhammad Saleh, ST. MT.2017.”RANCANG BANGUN ROBOT PEMADAM API BERODA FOUR WHEEL DRIVE (4WD) BERBASIS KENDALI LOGIKA
FUZZY”. Diakses dari:
https://media.neliti.com/media/publi cations/191157-ID
Dunia pembangkit listrik.com, 2018, “Pengertian dan Prinsip Kerja Flame”.
diakses dari
https://www.duniapembangkitlistrik.c om/2018/02/
DBP Virya Kharismawan, 2012, “PEMAMFAATAN LOGIKA FUZZY PADA ROBOT MOBIL (MOBILE ROBOT) PEMADAM API”
Mohammad Wasil, 2015.” KONTROL ULTRASONICRANGEFINDER DAN PERGERAKAN ROBOT PEMADAM
API MENGGUNAKAN FUZZY
LOGIC”.Diakses dari :
https://journal.trunojoyo.ac.id/jim/artic le
Agung Rachmat Putra , Andi Susilo, 2018 .” PERANCANGAN DAN IMPLEMENTASI ROBOT PEMADAM
API BERBASIS
MIKROKONTROLER ARDUINO
MEGA 2560”. Diakses dari : “.ejournal.urindo.ac.id/index.php/TI/is
sue/view/44
Herdianto Candra , 2017. “membuat robot beroda berbasis Arduino” https://candraherdianto.blogspot.com /2017/01
Joga D. Setiawan , Mochamad Subchan , and Agus Budiyono, 2009. “Virtual
Reality Simulation of Fire Fighting Robot Dynamic and Motion”
YANDI CAHYADI B, 2017. “ROBOT PEMADAM API DENGAN SISTEM DETEKSI DINI”. Paryanta*1 , Robby Rachmatullah2 , Yohana Kusuma Kristiani 3, 2018.
Prototipe Robot Pemadam Api Berbasis Mikrokontroler ATMEGA16 dengan Sistem Navigasi Wall Following”. Andalan elektro.id, 2018, “cara kerja dan
karakteristik sensor ping”. diakses dari
https://www.andalanelektro.id/2018/ 09/cara-kerja-dan-karakteristik-sensorping.