BAB IV
PENERAPAN DAN ANALISA
4.1. Penerapan Sistem
Penerapan sistem membahas hasil dari penerapan teori yang telah berhasil penulis kembangkan sehingga menjadi sistem tersebut dapat berjalan sesuai dengan desain awal. Foto hasil penerapan permodelan alat Pemberi pakan otomatis pada kondisi mati (ada pakan ) terlihat pada gambar dibawah ini :
Sedangkan foto hasil penerapan permodelan alat pemberi pakan otomatis pada kondisi standbay ( ada pakan ) terlihat pada gambar dibawah ini :
Sedangkan foto hasil penerapan permodelan alat pakan ikan otomatis pada kondisi berkerja ( ada pakan ) terlihat pada gambar dibawah ini :
Gambar 4.3. Sistem Permodelan Alat Pakan Ikan Pada Posisi Berkerja
Pengujian alat dilakukan untuk mengetahui apakah alat yang dibuat sudah sesuai atau belum sesuai dengan perancangan yang telah dirancang sebelumnya. Perlu dilakukan pengujian dan analisa terhadap alat yang dibuat Dari pengujian tersebut akan didapatkan data - data sejauh mana sistem tersebut dapat bekerja.
Pengujian alat dalam tugas akhir ini meliputi : 1. Pengujian Hardware
2. Ketepatan jadwal
3. Jumlah pakan yang konsisten dalam tiap bukaan 4. Ketepatan pembacaan Sensor Proximity
5. Pengujian Secara Keseluruhan.
4.2. Pengujian Hardware
4.2.1. Pengujian LCD
Pengujian ini dilakukan untuk mengetahui bahwa progam yang akan terlihat di LCD itu bisa, seperti pada gambar sebagai berikut :
4.4. Gambar Pengujian LCD Berikut adalah Program untuk LCD : void testLcd (void)
{
lcd.setCursor (0, 0); lcd.print (" Test LCD "); }
Program diatas adalah tulisan ”Test LCD” akan berada pada baris 0 dan Colom 0.
4.2.2. Pengujian RTC DS1307
Pengujian ini dilakukan untuk memastikan bahwa RTC DS1307 dapat bekerja dengan baik dan bisa tampil LCD, berikut adalah tampilan waktu yang akan tampil pada LCD
Gambar 4.2 Gambar Waktu yang tampil di lcd
Berikut program yang digunakan untuk menampilkan waktu pada LCD :
void jam() {
DateTime now = RTC.now(); jam1=now.hour();
mint=now.minute(); sec=now.second(); lcd.clear();
lcd.setCursor(0,0);
sprintf(buffer,"%02d/%02d/%d", now.day(), now.month(), now.year());
lcd.print(buffer);
lcd.setCursor(0,1);
sprintf(buffer1,"%02d:%02d:%02d", jam1, mint, sec); lcd.print(buffer1);
delay(500); }
Dari Program diatas dapat menampilkan hari dan tanggal untuk dilihat pada LCD.
4.2.3. Pengujian servo
Pengujian ini dilakukan untuk menguji servo dapat bergerak apabila digunakan untuk menggerakakan katub pakan ikan.
Berikut program servonya: void servo()
{
for(pos2 = 0; pos2 < kat; pos2 += 1) // goes from 0 degrees to 60 degrees
{ // in steps of 1 degree
myservo.write(pos2); // tell servo to go to position in variable 'pos'
delay(20); // waits 15ms for the servo to reach the position
}
delay(1000); }
Program ini akan menjalankan servo untuk bergerak menhuju 60 derajat.
void servo1() {
for(pos2 = kat; pos2 >=1 ; pos2 -=1) // goes from 60 degrees to 0 degrees
{ // in steps of 1 degree
myservo.write(pos2); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
Program ini akan menjalankan servo untuk bergerak menhuju 0 derajat. Jadi program yang kedua ini akan berkebalikan dengan yang pertama.
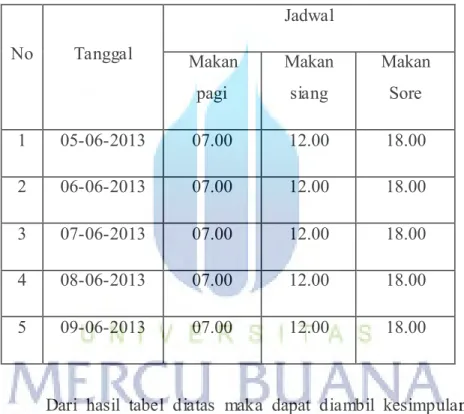
4.3. Pengujian ketepatan jadwal
untuk membuktikan bahwa alat dapat bekerja dengan maksimal maka di perlukan pengujian terhadap jadwal pemberian makan yaitu jadwal makan pagi, makan siang, makan sore.
Tabel 4.1 Pengujian jadwal
No Tanggal Jadwal Makan pagi Makan siang Makan Sore 1 05-06-2013 07.00 12.00 18.00 2 06-06-2013 07.00 12.00 18.00 3 07-06-2013 07.00 12.00 18.00 4 08-06-2013 07.00 12.00 18.00 5 09-06-2013 07.00 12.00 18.00
Dari hasil tabel diatas maka dapat diambil kesimpulan bahwa alat berjalan dengan baik mengikuti jadwal timer yang sudah diseting, dan tidak terjadi kesalahan waktu sedikitpun. Dan persentase eror dari pengjian ketepatan waktu dari alat ini adalah 0 %.
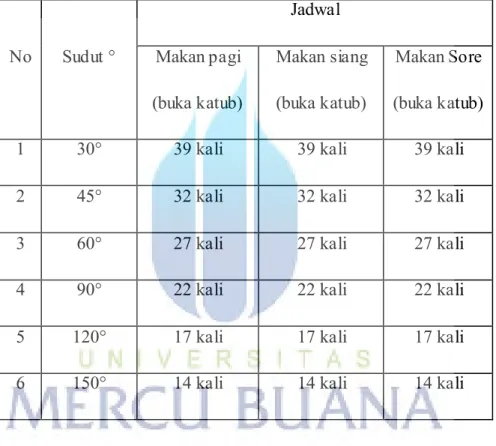
4.4. Pengujian Banyaknya Putaran Katub
untuk membuktikan bahwa alat dapat bekerja dengan maksimal maka di perlukan pengujian terhadap berapa banyak katub yang berputar selama 1 menit pada jadwal makan pagi, makan siang, makan sore.
Tabel 4.2 Pengujian Banyaknya Putaran katub
No Sudut ° Jadwal Makan pagi (buka katub) Makan siang (buka katub) Makan Sore (buka katub)
1 30° 39 kali 39 kali 39 kali
2 45° 32 kali 32 kali 32 kali
3 60° 27 kali 27 kali 27 kali
4 90° 22 kali 22 kali 22 kali
5 120° 17 kali 17 kali 17 kali
6 150° 14 kali 14 kali 14 kali
Dari hasil tabel diatas maka dapat diambil kesimpulan bahwa semakin besar derajat katub yang dibuka maka semakin sedikit pula putaran katub yang membuka pakan, dan dari beberapa percobaan diatas dapat disimpulkan bahwa putaran katub pakan hasilnya akan sama walaupun dioperasikan beberapakali, dan persentase kesalahan dari percobaan diatas adalah 0 %.
4.5. Pengujian Banyaknya Pakan Yang Keluar
untuk membuktikan bahwa alat dapat bekerja dengan maksimal maka di perlukan pengujian terhadap berapa banyak pakan yang dikeluarkan jadwal pemberian makan yaitu jadwal makan pagi, makan siang, makan sore.
Tabel 4.3. Pengujian Jumlah Pakan Yang Keluar.
No Sudut °
Jadwal alarm on Makan pagi
Satu kali buka katub (butir)
Makan siang Satu kali buka katub
(butir)
Makan Sore Satu kali buka katub
(butir)
1 30° 5 Butir 5 Butir 5 butir
2 45° 10 butir 15 butir 13 butir
3 60° 60 butir 72 butir 80 butir
4 90° 96 butir 93 butir 100 butir
5 120° 166 butir 179 butir 172 butir
6 150° 234 butir 249 butir 241 butir
Dari hasil percobaan diatas dapat diambil kesimpulan pada hasil percobaan 30° jumlah pakan yang keluar stabil untuk setiap buka katub, dan pada percobaan 45° - 150° hasil keluar pakan tidak beraturan (tidak maksimal) disebabkan oleh semakin besar derajat katub yang dibuka maka
4.6. Pengujian batas minimal untuk ketersediaan pakan
Untuk menguji apakah pakan sudah mau habis atau tidak bergantung dari sensor proximity yang di pasang. Percobaan dilakukan terhadap katub dengan posisi 120°.
Tabel 4.4. Tabel pengukuran terhadap jarak
No Jarak Sensor terhadap pakan (cm) Status alarm Makan pagi (bunyi/tidak) Makan siang (bunyi/tidak) Makan sore (bunyi/tidak)
1 2,5 – 5 Tidak Tidak Tidak
2 5 – 7,5 Tidak Tidak Tidak
3 7,5- 10 Tidak Tidak Tidak
4 10 – 12,5 Tidak Tidak Tidak
5 12,5 – 15 Tidak Bunyi Bunyi
6 >15 Bunyi Bunyi Bunyi
Dari hasil percobaan diatas terlihat bahwa pada jarak sensor terhadap pakan mulai 2 - 5 cm hingga 10 – 12,5 cm, alarm tidak berbunyi dan memberikan jumlah keluaran pakan yang stabil. Sedangkan pada jarak 12,5 – 15 cm, pada makan pagi alarm tidak berbunyi sedangkan mulai makan siang hingga makan sore alarm berbunyi hal ini disebabkan karena pada makan siang dan sore jarak sensor terhadap pakan sudah mencapai 15 cm. Pada jarak sensor > 15 cm hingga pakan habis maka alarm akan terus berbunyi.
4.7. Pengujian Secara Keseluruhan
Setelah dilakukannya pengujian Analisa dilakukan untuk melihat apakah sistem yang dibuat telah berjalan dengan baik. Berikut adalah analisa dari sistem-sistem tersebut.
Microcontroller Arduino berjalan dengan baik dan sesuai dengan perancangan, hal ini terlihat ketika tombol ditekan maka microcontroller akan mengeluarkan output.
Sensor Proximity telah berjalan dengan baik. Hal ini terlihat dari respon sensor saat pakan tersedia maupun tidak. Terbukti pada alarm yang berbunyi apabila jarak sensor dengan pakan sudah mencapai atau lebih dari 15 cm. Hal tersebut terlihat pada Fitur serial monitor yang ada pada modul arduino.
Untuk tampilan LCD Modul microcontroller Arduino juga telah mengeluarkan data pada pin-pin Output, sehingga LCD akan menampilkan tanggal dan waktu.
Pada saat katub terbuka, maka pakan akan keluar sesuai dengan derajat pembukaan katub. Semakin besar derajat pembukaan katub yang digunakan maka akan semakin banyak pakan yang keluar. Secara bersamaan, sensor akan bekerja apabila jarak sensor terhadap pakan mencapai minimal 15 cm, maka alarm akan berbunyi.
Tabel 4.5. Hasil Pengujian Keseluruhan Jumlah Pakan
No Sudut °
Jumlah butir/menit
(jumlah putaran katub x butir per putaran) Makan pagi (butir) Makan siang (butir) Makan Sore (butir)
1 30° 195 Butir 195 Butir 195 butir
2 45° 320 butir 480 butir 418 butir
3 60° 1620 butir 1944 butir 2160 butir
4 90° 2112 butir 2046 butir 2200 butir
5 120° 2822 butir 3043 butir 2924 butir
6 150° 3276 butir 3486 butir 3374 butir
Dari hasil tabel diatas maka dapat diambil kesimpulan bahwa semakin besar derajat katub yang dibuka, walaupun jumlah putarannya lebih sedikit, namun karena permukaan untuk keluar pakan semakin luas sehingga banyak jumlah pakan yang dikeluarkan lebih besar. Sebaliknya apabila derajat katub kecil, walaupun jumlah putaran yang dihasilkan lebih banyak namun jumlah pakan yang keluar lebih sedikit sehingga total pakan per menit nya tetap jauh lebih sedikit dibandingkan dengan derajat katub yang lebih besar.