BAB 2
DASAR TEORI
Gelombang air merupakan manifestasi dari suatu rambatan energi yang memiliki frekuensi dan periode. Gelombang air yang terjadi di laut dapat disebabkan oleh angin, gerakan kapal, gempa atau gaya gravitasi dari matahari dan bulan. Salah satu penyebab gelombang yang utama di laut adalah angin.
Setelah gelombang terbentuk, gelombang tersebut akan merambat di permukaan laut. Dalam mempelajari perambatan gelombang ini digunakanlah teori gelombang, diantaranya adalah teori gelombang linier. Teori ini digunakan sebagai salah satu pendekatan dalam memodelkan perambatan gelombang secara matematis. Dalam teori ini digunakan beberapa asumsi untuk menyederhanakan permasalahan.
Jika gelombang yang merambat mengenai struktur yang berada di perairan akan dikenai gaya yang ditimbulkan oleh gelombang. Gaya yang mengenai struktur tersebut diformulasikan dalam persamaan Morison, persamaan Froude Krylov dan teori difraksi.
2.1 TEORI GELOMBANG LINIER
Pada pengembangan teori ini diasumsikan bahwa fluida dengan aliran stedi, tak mampu mampat (incompressible), dan irotasional. Selain itu berlaku juga hukum kekekalan massa yang merupakan dasar persamaan differensial gerak gelombang.
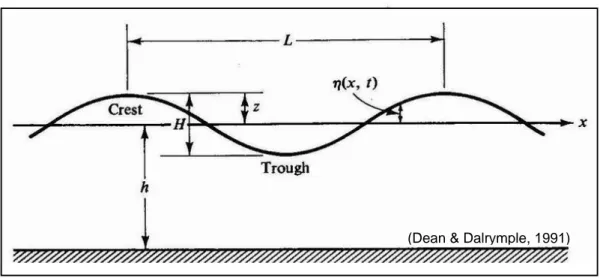
Parameter terpenting dari gelombang adalah panjang gelombang (L) (jarak dari satu puncak gelombang ke puncak gelombang lainnya yang berurutan), tinggi gelombang H ( jarak vertikal dari lembah gelombang ke puncak gelombang), periode gelombang T (waktu yang ditempuh untuk satu lintasan gelombang), dan kedalaman perairan tempat gelombang menjalar.
Untuk perumusan teori gelombang digunakan koordinat kartesian, dimana x searah dengan gerak gelombang, z diukur dari permukaan laut rata‐rata keatas secara vertikal, dan y tegak lurus terhadap x dan z.
Diasumsikan gelombang dalam dua dimensi pada bidang x‐z, bergerak dalam arah x positif serta bergerak di permukaan laut yang datar dengan kedalaman yang konstan dimana selama bergerak bentuk gelombang tidak berubah. Selain itu fluidanya diasumsikan sebagai fluida seragam dan tidak mampu mampat (incompressible), sehingga kerapatan fluida ρ konstan serta pada permukaan bebas tekanan seragam dan konstan. Asumsi lainnya adalah tegangan permukaan diabaikan.
Di bawah ini akan digambarkan profil gelombang dua dimensi yang bergerak dalam arah x. Elevasi muka air η merupakan fungsi dari ruang dan waktu (x,t)
Gambar 2. 1 Karakteristik gelombang. Asumsi dasar yang diterapkan adalah fluida yang tak mampu mampat (incompressible) dan tidak kental (inviscid), selain itu tidak terjadi gerak berputar fluida (irrotational motion), ada potensial kecepatan (velocity potential) yang memenuhi persamaan kontinuitas. (incompressible) (2.1) Atau (2.2) (irrotational) (2.3) Dengan = vektor kecepatan = potensial kecepatan Persamaan (2.2) ditulis dalam persamaan Laplace sebagai berikut (2.4) Untuk dua dimensi x dan z, persaman Laplace ditulis menjadi (2.5)
Persamaan Laplace merupakan persamaan pengatur BVP (Boundary Value Problem) pada Gambar 2.2 dengan syarat batas sebagai berikut: 1. Syarat batas dasar perairan (the bottom boundary condition, BBC) pada z = ‐h (2.6) 2. Syarat batas permukaan: • Syarat batas kinematis (kinematic free surface boundary condition, KFSBC) pada z = η (x,t) (2.7) • Syarat batas dinamis (dynamic free surface boundary condition, DFSBC) pada z= η (x,t) (2.8) 3. Syarat batas periodik: (x,t) = (x+L,t) (x,t) = (x,t+T) (2.9) Gambar 2. 2 Sketsa definisi masalah nilai batas untuk teori gelombang linier. Solusi yang tepat dari persamaan diatas sangat sulit untuk ditentukan karena syarat batas di permukaan memiliki suku‐suku tak linier serta kondisi awal di permukaan, z = η (x,t), tidak diketahui. Oleh karenanya dilakukan penyederhanaan dengan melinierkan suku‐suku tak linier. Pelinieran
panjang gelombang L dan kedalaman h, jadi H<<L,h. Berdasarkan asumsi ini maka teori gelombangnya disebut dengan teori gelombang linier.
Karena asumsi H<<L,h maka suku‐suku tak linier pada syarat batas dapat diabaikan serta syarat batas di permukaan diterapakan pada z=0 sehingga syarat batas di permuakaan dapat ditulis menjadi: • Syarat batas kinematis (kinematic free surface boundary condition, KFSBC) pada z = 0 (2.10) • Syarat batas dinamis (dynamic free surface boundary condition, DFSBC) pada z= 0 (2.11)
Dengan memanfaatkan syarat batas yang baru tersebut, kita dapat menyelesaikan persamaan Laplace di atas dengan menggunakan metoda pemisahan variabel (separation of variables method) sehingga untuk gelombang berjalan didapat potensial kecepatan. (2.12) Dari syarat batas dinamis, dengan membuat rata‐rata dari η=0 maka C(t) =0 sehingga pada z=0 (2.13) Atau (2.14)
Sementara itu dari syarat batas kinematis dengan mensubsitusikan persamaan (2.12) dan (2.14) ke persamaan tersebut, didapat persamaan baru yang disebut persamaan dispersi, yaitu
(2.15)
Gelombang berjalan membutuhkan satu perioda T untuk menempuh satu panjang gelombang L, dengan ω = 2π/T serta k = 2π/L maka cepat rambat gelombang dapat dituliskan dalam persamaan berikut
(2.16)
Atau
(2.17)
Pada laut dalam, kh besar dan tanh 2πh/L = 1, sehingga L= L0 =gT2/2π dimana L0 adalah
panjang gelombang di laut dalam. Secara umum ditulis sebagai berikut:
(2.18) Jadi panjang gelombang berkurang dengan berkurangnya kedalaman untuk perioda yang konstan.
2.2 KOMPONEN KECEPATAN DAN PERCEPATAN PARTIKEL
Kecepatan partikel dapat dihitung dengan diketahuinya potensial kecepatan, dimana kecepatan partikel air merupakan turunan pertama dari potensial kecepatan. Kecepatan horizontal partikel u adalah: (2.19) Atau (2.20)
Dari kecepatan dapat dihitung percepatan partikel air, dimana percepatan partikel air merupakan turunan pertama kecepatan terhadap waktu. Percepatan lokal dalam arah horizontal adalah (2.21) Dan kecepatan vertikal w serta percepatannya adalah (2.22)
(2.23)
Kecepatan dan percepatan merupakan fungsi dari posisi sehingga terdapat beda fase sebesar 900. Kecepatan horizontal akan mempunyai nilai yang ekstrim pada saat posisi fasenya (kx‐ωt) = 0,π,… atau di bawah puncak dan lembah gelombang sementara percepatan mempunyai nilai ekstrim pada saat π/2,3π/2,… atau pada waktu perpindahan muka air adalah nol. 2.3 GAYA GELOMBANG Setiap struktur yang terdapat dilaut akan dibebani oleh gaya gelombang, untuk menghitung gaya tersebut maka diperlukan penerapan mekanika gelombang. Struktur yang sering digunakan di daerah pantai dan lepas pantai adalah struktur yang memanfaatkan tiang sebagai penyangga. Dalam perhitungan gaya gelombang dapat digunakan beberapa rumusan diantaranya adalah persamaan Morison, persamaan Froude Krylov dan teori difraksi. Persamaan‐persamaan ini dapat digunakan berdasarkan ukuran dari struktur yang dilewati oleh gelombang tersebut. Untuk struktur yang berukuran kecil dimana D (diameter tiang penopang dari struktur tersebut) memiliki ukuran yang jauh lebih kecil dari L (panjang gelombangnya) maka perhitungan gaya gelombangnya dapat dihitung dengan persamaan Morison dan persamaan Froude Krylov. Sedangkan untuk struktur yang memiliki ukuran yang besar dimana diameter tiang penopang dari struktur tersebut memiliki ukuran yang tidak berbeda jauh dari panjang gelombangnya maka perhitungan gaya gelombangnya dapat dihitung dengan teori difraksi. Berikut ini akan dijelaskan penggunaan persamaan perhitungan gaya‐ gaya tersebut:
• Untuk struktur yang berukuran kecil “small body” (D/L 0.2 ) dapat digunakan persamaan Morison.
• Jika struktur (0.2 < D/L 0.5) maka dapat digunakan persamaan Froude Krylov.
• Sedangkan jika struktur memiliki ukuran yang besar “large body” (D/L > 0.5) dapat digunakan teori difraksi.
Teori difraksi digunakan apabila struktur yang akan dilalui cukup besar sehingga akan mempengaruhi gelombang. Struktur yang besar ini mengakibatkan gelombang akan menghambur ketika melewati struktur sehingga terjadi perubahan pola aliran dari gelombang.
Gaya gelombang Morison dan Froude Krylov mensyaratkan bahwa gelombang tidak pecah saat melewati struktur. Selain itu, pengaruh keberadaan tiang terhadap aliran akibat gelombang diabaikan karena tidak merubah pola aliran. Asumsi ini dipakai karena diameter tiang (D) lebih kecil dibandingkan panjang gelombang (L). Dua koefisien gaya, koefisien inersia (CM) dan koefisien seret
(CD), digunakan untuk menentukan hubungan gaya dan gelombang. 2.3.1 Persamaan Morison Morison menyatakan bahwa gaya gelombang dapat diekspresikan sebagai penjumlahan dari gaya seret (drag force) akibat kecepatan partikel air saat melewati struktur dan gaya inersia (inertia force) akibat percepatan partikel air.
(2.24) (2.25) Persamaan Morison dibatasi oleh syarat yang dinyatakan sebagai berikut: Dimana D = diameter struktur L = Panjang gelombang Hal ini berarti bahwa struktur lebih kecil dari panjang gelombang. Untuk menentukan gaya total (F), maka persamaan Morison perlu diintegrasikan sepanjang struktur yang terendam. (2.26) (2.27) dimana F : gaya hidrodinamik per satuan panjang CD : koefisien seret CM : koefisien inersia : volume struktur yang terkena gaya A : luas proyeksi dari struktur arah normal aliran : kecepatan pertikel air, tegak lurus terhadap sumbu struktur : percepatan partikel air, tegak lurus terhadap elemen struktur
2.3.2 Persamaan Froude Krylov
Persamaan Froude Krylov berlaku untuk menghitung gaya gelombang yang bekerja pada struktur yang cukup besar, namun keberadaan struktur ini tidak memberikan perubahan yang berarti pada pola aliran. Persamaan Froude Krylov dibatasi oleh syarat yang dinyatakan sebagai berikut: Dimana D = diameter struktur L = Panjang gelombang Persamaan Froude Krylov dinyatakan dalam persamaan matematis sebagai berikut: (2.28) Dimana (2.29) Maka persamaan 2.28 dapat ditulis menjadi: (2.30) dimana F : gaya hidrodinamik per satuan panjang : massa jenis fluida g : percepatan gravitasi H : tinggi gelombang k : bilangan gelombang n : unit vektor normal
2.3.3 Teori difraksi
Teori difraksi dapat digunakan dalam menghitung gaya gelombang yang bekerja pada struktur yang cukup besar. Akibat dari adanya struktur tersebut maka gelombang akan terdifraksi dan terjadi perubahan pada pola aliran. Akibat terjadinya perubahan pola aliran maka terdapat potensial kecepatan yang baru. Potensial kecepatan yang baru didapat dengan menggunakan prinsip super posisi, berikut ini akan akan disajikan dalam bentuk matematis:
(2.31) dimana : potensial kecepatan total : potensial kecepatan gelombang datang : potensial kecepatan yang menyebar (scattered)
Maka gaya gelombang yang bekerja pada struktur dapat dihitung dengan mensubsitusikan persamaan 2.28 dan 2.29 dengan persamaan 2.31, sehingga didapatkan pesamaan berikut:
(2.32)
2.4 STRUKTUR TERAPUNG
Setiap struktur yang tedapat dilaut akan dipengaruhi oleh gelombang. Respon dari struktur tersebut akibat adanya gelombang dapat ditentukan dengan menganalisa struktur berdasarkan sudut pandang hidrodinamika. Dalam kasus ini struktur terapung diasumsikan berada pada daerah yang memiliki gelombang yang teratur (regular wave) yang menyerupai bentuk sinusoidal. Untuk mendapatkan total gaya hidrodinamika yang bekerja pada struktur terapung maka perlu kita ketahui komponen penyusun dari gaya hidrodinamika tersebut, diantaranya adalah: • Beban eksitasi (exciation load) • Beban radiasi (radiation load) Ilustrasi dari total gaya hirodinamika tersebut dapat dilihat pada gambar 2.3 berikut ini: Gambar 2. 3 Ilustrasi total gaya hirodinamika.
Dalam bentuk matematis total gaya hidrodinamika pada struktur terapung dapat ditulis menjadi: Untuk ( j = 1,2, … ,6) (2.33) Dimana : “Wave excitatioan forces” yang terdiri dari gaya gelombang Froude Krylov dan gaya gelombang difraksi : “Radiation forces” yang terdiri dari “addede mass” dan potensial damping : “Viscous forces” yang terdiri dari “skin friction” dan “eddy making” : “Hirostatic forces” yang terdiri dari gaya gravitasi dan gaya apung (buoyancy) Setiap komponen gaya memiliki potensial kecepatan yang berbeda‐beda, penjumlahan dari masing‐masing potensial kecepatan akan menghasilkan sebuah potensial kecepatan total. Dimana masing‐masing potensial kecepatan memenuhi syarat batas yang berlaku.
Pengaruh gaya yang ditimbulkan akibat kekentalan fluida (viscous forces) dalam kasus ini dapat diabaikan, hal ini dikarenakan bilangan reynold (persamaan 2.34) memiliki nilai yang besar, sehingga kekentalan fluida tidak berpengaruh. (2.34) Dimana u : kecepatan aliran fluida D : diameter struktur : kekentalan fluida Bilangan reynold memiliki nilai yang besar karena dalam kasus ini struktur yang dilewati oleh gelombang memiliki ukuran yang besar. Sedangkan gaya hidrostatik akan berpengaruh dari kekakuan dari stuktur.
Untuk struktur terapung total potensial kecepatan merupakan penjumlahan dari potensial kecepatan gelombang datang , potensial kecepatan difraksi , yang merupakan akibat dari gaya luar tanpa adanya pengaruh dari gerakaan struktur, dan juga potensial kecepatan radiasi , yang merupakan hasil dari gerakan struktur. Dalam bentuk matematis total potensial kecepatan dapat ditulis sebagai berikut:
(2.35)
Dalam bentuk kompleks persamaan 2.34 dapat ditulis menjadi:
(2.36)
Dimana a adalah amplitudo gelombang dan adalah frekuensi gelombang datang. Bentuk kompleks dari potensial gelombang datang dinyatakan . Bentuk kompleks dari potensial kecepatan difraksi dinyatakan . Sedangkan bentuk kompleks dari potensial kecepatan radiasi dinyatakan , dimana adalah bentuk kompleks dari arah gerakan dari struktur
terapung .
2.4.1 Beban eksitasi (excitation load)
Beban eksitasi merupakan beban luar yang pada struktur. Dalam permasalahan ini beban eksitasi diakibatkan oleh gelombang. Beban eksitasi terdiri dari beban akibat gelombang datang dan beban difraksi. Dimana besar gaya yang ditimbulkan oleh beban eksitasi merupakan penjumlahan dari gaya akibat gelombang datang dan gaya akibat difraksi, dalam rumusan matematis dapat ditulis menjadi: (2.37) Sehingga didapatkan gaya eksitasi sebagai berikut (2.38) 2.4.2 Beban radiasi (radiation load)
Beban radiasi muncul akibat pergerakan dari struktur terapung sehingga menimbulkan potensial kecepatan baru. Potensial kecepatan ini dikenal sebagai potensial kecepatan radiasi. Gaya yang ditimbulkan oleh beban radiasi ini dinyatakan dalam bentuk matematis sebagai berikut:
(2.39) Potensial kecepatan radiasi dapat dinyatakan dalam persamaan matematis sebagai berikut:
(2.40) Dimana adalah arah gerakan dari strukturuntuk arah j, sedangkan adalah potensial kecepatan radiasi untuk arah j. Dari persamaan 2.39 bentuk riil dari persamaan ini disebut sebagai koefisien massa tambah sedangkan bentuk imajiner dari persamaan ini disebut sebagai koefisien redaman. (2.41) (2.42) Sehingga didapatkan bentuk lain dari persamaan gaya yang ditimbulkan oleh beban radiasi adalah:
(2.41) Dimana merupakan koefisien massa tambah, sedangkan adalah koefisien redaman.
2.5 STRIP THEORY
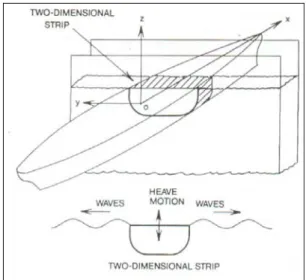
Strip theory merupakan suatu metode perhitungan masalah dinamika dari suatu struktur terapung, dimana gaya‐gaya yang bekerja dan respon suatu struktur tiga dimensi tersebut dapat ditentukan dengan menggunakan hasil dari teori potensial dua dimensi. Teori ini mengasumsikan bahwa struktur ramping atau dengan kata lain ukuran panjang struktur jauh lebih panjang dari lebar dan draft struktur terapung tersebut.
Prinsip dari teori ini adalah dengan membagi struktur terapung menjadi beberapa bagian ( 20 bagian), kemudian mengkombinasikan seluruh koefisien dari setiap bagian struktur tersebut untuk memperoleh koefisien “added mass” dan koefisien “damping”.
Gambar 2. 4 Potongan 2 dimensi dari kapal (struktur terapung).
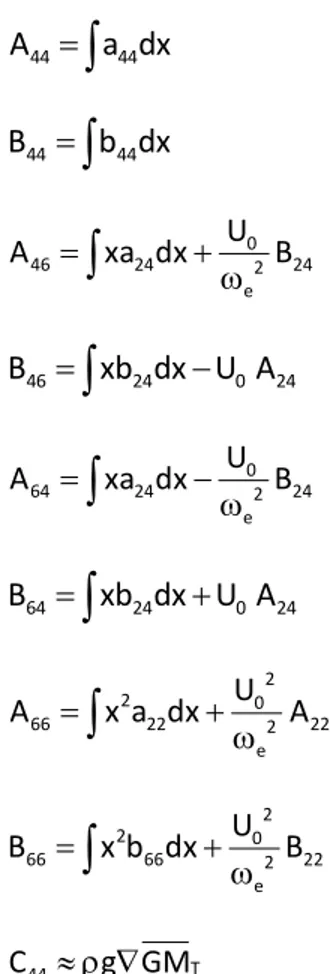
Koefisien‐koefisien tersebut dapat dibentuk dalam matriks yang berukuran 6 6, dimana ukuran matriks ini menandakan struktur bergerak dalam 6 derajat kebebasan. Berikut ini adalah rumusan untuk menghitung masing‐masing koefisien pembentuk matriks persamaan gerak dinamik: Untuk arah vertikal: 11 11
A
=
∫
a dx
(2.42) 11 11B
=
∫
b dx
(2.43) 13 31 13A
=
A
=
∫
a dx
(2.44) 13 31 13B
=
B
=
∫
b dx
(2.45) 0 15 13 2 13 e U A = − a dx− B ω∫
(2.46) 15 13 0 13B
= −
∫
xb dx U A
+
(2.47) 0 51 13 2 13 e U A = − a dx+ B ω∫
(2.48) 15 13 0 13B
= −
∫
xb dx U A
−
(2.49) 33 33A
=
∫
a dx
(2.50) 33 33B
=
∫
b dx
(2.51)0 35 33 2 33 e U A = − xa dx− B ω
∫
(2.52) 35 33 0 33B
= −
∫
xb dx U A
−
(2.53) 0 53 33 2 33 e U A = − xa dx+ B ω∫
(2.54) 53 33 0 33B
= −
∫
xb dx U A
−
(2.55) 2 2 0 55 33 2 33 e U A = − x a dx+ A ω∫
(2.56) 2 2 0 55 33 2 33 e U B = − x b dx+ B ω∫
(2.57) 33 33C
=
∫
c dx
= ρ
g B(x)dx
∫
(2.58) 35 53 33C
=
C
=
∫
xc dx
= −ρ
g x B(x)dx
∫
(2.59) 2 2 55 33C
=
∫
x c dx
= ρ
g x B(x)dx
∫
(2.60) Untuk arah horizontal: 22 22A
=
∫
a dx
(2.61) 22 22B
=
∫
b dx
(2.62) 24 42 24A
=
A
=
∫
a dx
(2.63) 24 42 24B
=
B
=
∫
b dx
(2.64) 0 26 22 2 22 e U A = − xa dx+ B ω∫
(2.65) 26 22 0 22B
= −
∫
xb dx U A
−
(2.66) 0 62 22 2 22 e U A = − xa dx− B ω∫
(2.67) 62 22 0 22B
= −
∫
xb dx U A
+
(2.68)44 44
A
=
∫
a dx
(2.69) 44 44B
=
∫
b dx
(2.70) 0 46 24 2 24 e U A = xa dx+ B ω∫
(2.71) 46 24 0 24B
=
∫
xb dx U A
−
(2.72) 0 64 24 2 24 e U A = xa dx− B ω∫
(2.73) 64 24 0 24B
=
∫
xb dx U A
+
(2.74) 2 2 0 66 22 2 22 e U A = x a dx+ A ω∫
(2.75) 2 2 0 66 66 2 22 e U B = x b dx+ B ω∫
(2.76) T 44 C ≈ ρ ∇g GM (2.77)Sebagai contoh penggunaan teori strip dalam menentukan massa tambah dan koefisien redaman. Dimisalkan sebuah silinder dengan panjang L dan memiliki jari‐jari sebesar R. lihat gambar 2.5.
Gambar 2. 5 Penampang melintang buoy berbentuk silinder.
Pusat koordinat berada tepat di pusat berat dari silinder dan permukaan air berada tepat pada sumbu x dari silinder tersebut. Untuk mendapatkan masa tambah pada arah pitch A55, dengan
meninjau potongan sebesar dx yang terpengaruh oleh percepatan dalam arah vertikal ‐x . Maka akan terdapat massa tambah pada potongan tersebut yang besarnya . Gaya yang ditimbulkan oleh massa tambah ini akan menimbulkan momen dalam arah y. Dengan mengintegrasikan panjang total dari silinder maka akan didapatkan momen total dalam arah pitch
sebesar
(2.47) Berdasarkan persamaan 2.41 maka momen total dalam arah pitch ini sama dengan ‐A55 .
Hal ini berarti . Sedangkan koefisien redamannya bernilai nol karena tidak ada permukaan bebas.