Rancang Bangung Kendaraan Udara Tanpa Awak Tipe
Quadrotor
Irfan Mauludin
Tri Arief Sardjono Djoko Purwanto
Jurusan Teknik Elektro ITS, Surabaya-60111, email : [email protected]Abstrak – Penelitian pada miniatur robot terbang otomatis telah intensif dilakukan di berbagai negara. Perkembangan kendaraan udara tanpa awak (unmanned aerial vehicles -UAVs) cukup pesat baik untuk kepentingan militer maupun sipil. Tugas akhir ini membahas tentang pemodelan dan kontrol pada UAVs tipe quadrotor. Dalam hal ini diperkenalkan rancang bangun quadrotor menggunakan open loop kontrol.
kata kunci : quadrotor, UAVs
I.
PENDAHULUAN
Benda terbang selalu memberikan daya tarik yang besar bagi manusia inilah yang mendorong semua jenis penelitian dan pengembangan. Proyek ini dimulai pada tahun 2010, waktu di mana komunitas robot menunjukkan minat yang menarik pada pengembangan UAVs. Tantangan ilmiah dalam mendesain UAVs dan kontrol dalam lingkungan yang sebenarnya dan kurangnya solusi yang ada, sangat memotivasi semua orang.Di sisi lain, aplikasi yang luas baik dari aplikasi di bidang militer atau pasar sipil mendorong terciptanya UAVs. Dari berbagai tipe UAVs akhirnya diputuskan yang bertipe quadrotor. Tantangannya tidak hanya dari gerak dinamika tetapi juga dari pengolahan data sensor dan kontrol yang tepat. Mengintegrasikan sensor, aktuator dan kontrol ke dalam terbang vertikal ke dalam sistem dengan operasi yang layak bukan masalah yang sederhana.
II.
TEORI PENUNJANG
2.1 Sensor IMU
Pada tugas akhir ini sensor IMU yang digunakan adalah tipe 6DOF combo yang diproduksi oleh Sparkfun Electronics. Sensor IMU 6DOF dari sparkfun ini memiliki tingkat sensitivitas dan selektifitas yang baik pada suhu tertentu, filterasi sinyal dengan high pass filter. Sehingga dengan menggunakan IMU 6DOF didapatkan hasil akurat untuk mendeteksi posisi benda.
Sensor ini terdiri dari 2 jenis sensor yaitu sensor gyrometer dan accelerometer. Sensor gyrometer menggunakan LPR530AL (pitch dan roll), LY530ALH (yaw) sedangkan sensor accelerometer menggunakan ADXL335 triple-axis.
Sehingga dihasilkan 6 derajat kebebasan pengukuran dari sensor ini. Semua outputnya analog dan untuk gyro terdapat 1x dan 4x penguatan. Tegangan yang digunakan adalah 3.3V. Ciri sensor ini :
a. 2.7-3.6VDC power supply. b. Low power consumption.
c. Pitch, yaw, and roll gyro outputs 1x and 4x amplified (0.83 and 3.33 mV/°/s sensitivity, respectively). d. ±300°/s range.
e. x-, y-, and z-axis accelerometer outputs.
f. 300mV/g sensitivity. g. ±3g range.
Gambar 1. Sensor IMU 6DOF.
2.2 Brushless Motor
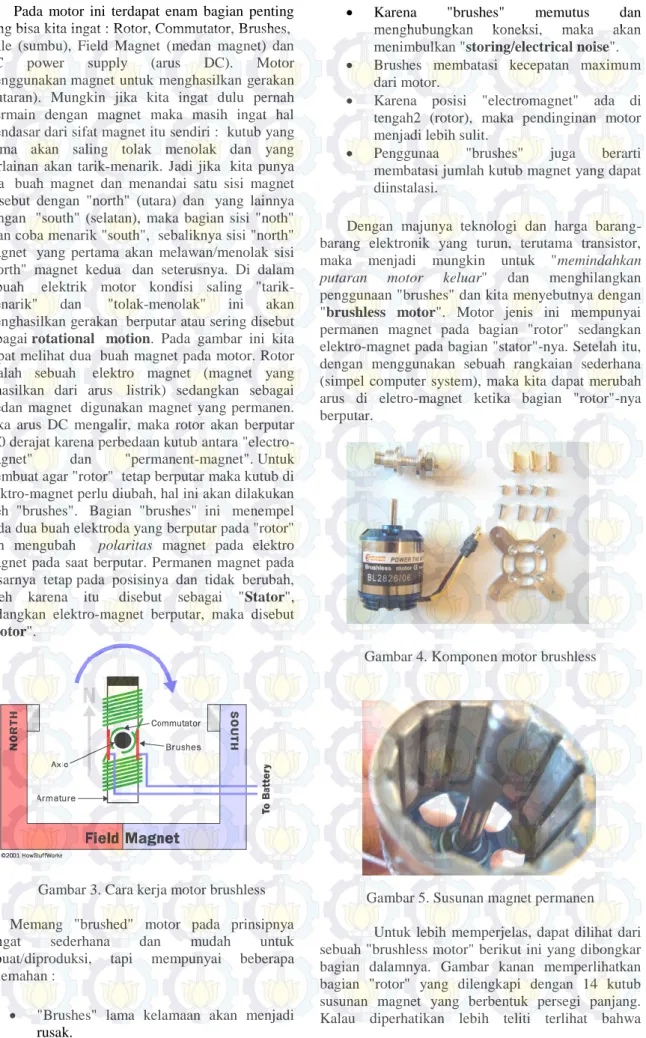
Sebelum lebih jauh membicarakan mengenai "brushless-motor", akan dijelaskan terlebih dahulu bagaimana sebenarnya electrik-motor bisa berputar/bekerja? Untuk itu diberikan contoh mengenai prinisip dari motor listrik sederhana yang menggunakan dua kutub (two pole) dan dialiri arus
searah (DC).
Pada motor ini terdapat enam bagian penting yang bisa kita ingat : Rotor, Commutator, Brushes, Axle (sumbu), Field Magnet (medan magnet) dan DC power supply (arus DC). Motor menggunakan magnet untuk menghasilkan gerakan (putaran). Mungkin jika kita ingat dulu pernah bermain dengan magnet maka masih ingat hal mendasar dari sifat magnet itu sendiri : kutub yang sama akan saling tolak menolak dan yang berlainan akan tarik-menarik. Jadi jika kita punya dua buah magnet dan menandai satu sisi magnet tersebut dengan "north" (utara) dan yang lainnya dengan "south" (selatan), maka bagian sisi "noth" akan coba menarik "south", sebaliknya sisi "north" magnet yang pertama akan melawan/menolak sisi "north" magnet kedua dan seterusnya. Di dalam sebuah elektrik motor kondisi saling "tarik-menarik" dan "tolak-menolak" ini akan menghasilkan gerakan berputar atau sering disebut sebagai rotational motion. Pada gambar ini kita dapat melihat dua buah magnet pada motor. Rotor adalah sebuah elektro magnet (magnet yang dihasilkan dari arus listrik) sedangkan sebagai medan magnet digunakan magnet yang permanen. Jika arus DC mengalir, maka rotor akan berputar 180 derajat karena perbedaan kutub antara "electro-magnet" dan "permanent-magnet". Untuk membuat agar "rotor" tetap berputar maka kutub di elektro-magnet perlu diubah, hal ini akan dilakukan oleh "brushes". Bagian "brushes" ini menempel pada dua buah elektroda yang berputar pada "rotor" dan mengubah polaritas magnet pada elektro magnet pada saat berputar. Permanen magnet pada dasarnya tetap pada posisinya dan tidak berubah, oleh karena itu disebut sebagai "Stator", sedangkan elektro-magnet berputar, maka disebut "Rotor".
Gambar 3. Cara kerja motor brushless
Memang "brushed" motor pada prinsipnya sangat sederhana dan mudah untuk dibuat/diproduksi, tapi mempunyai beberapa kelemahan :
"Brushes" lama kelamaan akan menjadi rusak.
Karena "brushes" memutus dan menghubungkan koneksi, maka akan menimbulkan "storing/electrical noise". Brushes membatasi kecepatan maximum
dari motor.
Karena posisi "electromagnet" ada di tengah2 (rotor), maka pendinginan motor menjadi lebih sulit.
Penggunaa "brushes" juga berarti membatasi jumlah kutub magnet yang dapat diinstalasi.
Dengan majunya teknologi dan harga barang-barang elektronik yang turun, terutama transistor, maka menjadi mungkin untuk "memindahkan
putaran motor keluar" dan menghilangkan penggunaan "brushes" dan kita menyebutnya dengan "brushless motor". Motor jenis ini mempunyai permanen magnet pada bagian "rotor" sedangkan elektro-magnet pada bagian "stator"-nya. Setelah itu, dengan menggunakan sebuah rangkaian sederhana (simpel computer system), maka kita dapat merubah arus di eletro-magnet ketika bagian "rotor"-nya berputar.
Gambar 4. Komponen motor brushless
Gambar 5. Susunan magnet permanen
Untuk lebih memperjelas, dapat dilihat dari sebuah "brushless motor" berikut ini yang dibongkar bagian dalamnya. Gambar kanan memperlihatkan bagian "rotor" yang dilengkapi dengan 14 kutub susunan magnet yang berbentuk persegi panjang. Kalau diperhatikan lebih teliti terlihat bahwa
potongan2 magnet tersebut dilem menggunakan semacam "epoxy" berwarna abu2 tua.
Gambar 6. Susunan lilitan tampak samping
Gambar 7. Susunan lilitan tampak atas
Sekarang kita dapat melihat bagian "stator"-nya. "Stator" ini mempunyai model 12 "gigi" (dapat dihitung pada jumlah paket gulungannya) diatas semacam "coating" (lapisan) warna hijau dimana gulungan ini dipasang.
"Brushless Motor" mempunyai banyak keuntungan dibandingkan dengan tipe motor yang biasa (brushed) :
Karena bukan "bruss" tetapi rangkaian komputer kecil yang mengontrol perpindahan arus, maka arus tersebut akan bisa lebih akurat (presisi). Komputer juga dapat mengatur kecepatan motor lebih baik sehingga membuat "brushless motor" lebih efisien.
Tidak adanya storing/electrical noise. Tidak menggunakan "brushes" yang dapat
rusak setelah lamanya pemakaian. Dengan posisi "electromagnets" di bagian
"stator", maka pendinginan motor menjadi lebih mudah..
Jumlah "electromagnets" di stator dapat sebanyak mungkin untuk mendapatkan kontrol yang lebih akurat..
Satu kerugian dari "brushless motor" adalah harganya yang relatif masih agak tinggi dibandingkan dengan "brush motor", namun ini bisa terbayarkan nantinya karena "brushless motor" mempunyai tingkat efisiensi yang tinggi dan lebih tahan lama.
III.
PERANCANGAN SISTEM
Pada bab ini dibahas tentang perancangan alat secara keseluruhan sesuai dengan blok diagram sistem pada gambar 3.1 meliputi perancangan
hardware,dan software. Dijelaskan pula lebih terinci
tiap-tiap bagian atau modul-modul penyusun alat ini.Yang terdiri dari Minimum Sistem Mikrokontroler ATMEGA32, IMU 6 DOF dan ESC.
Gambar 8. Kontrol close loop
Bateray berfungsi untuk mencatu arus dan
tegangan ke semua instrument baik rangkaian IMU 6 DOF, ESC,dan minimum sistem. Sebuah Bateray yang berfungsi dengan baik akan menyebabkan kerja dari alat menjadi baik pula, Bateray ini menghasilkan keluaran tegangan 12.6 volt DC dengan arus max 2200mA x 45C= 99A.
Gambar 9. Quadrotor
3.1 Kalman Filter
Pemilihan kalman filter sebagai filter data sensor gyro dan accelerometer dikarenakan memiliki time delay yang pendek sehingga sangat berguna untuk perhitungan data yang real time.
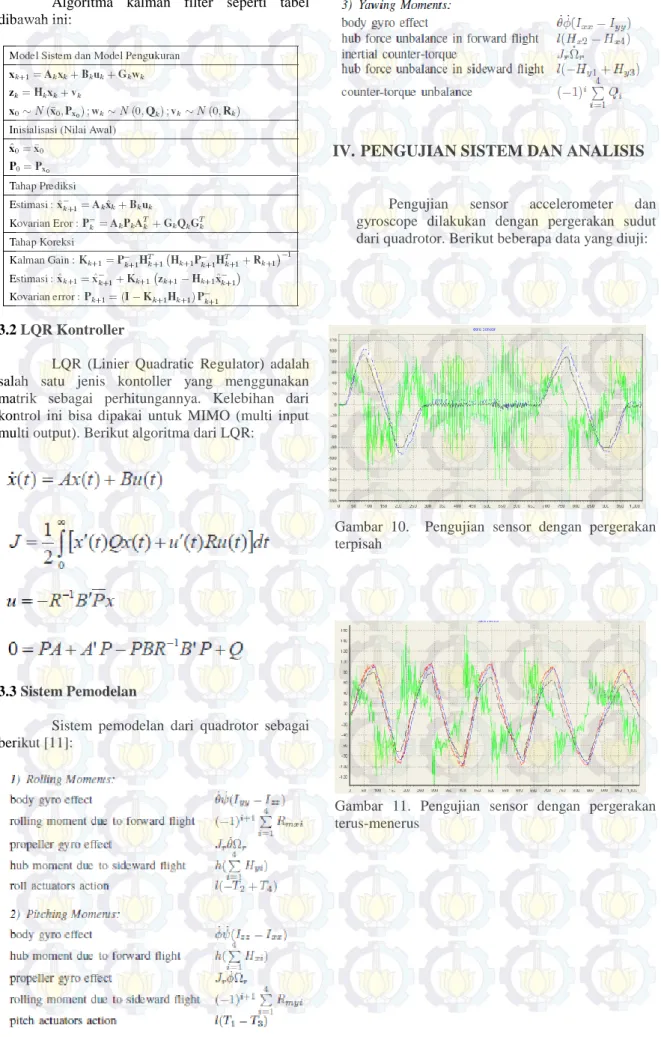
Algoritma kalman filter seperti tabel dibawah ini:
3.2 LQR Kontroller
LQR (Linier Quadratic Regulator) adalah salah satu jenis kontoller yang menggunakan matrik sebagai perhitungannya. Kelebihan dari kontrol ini bisa dipakai untuk MIMO (multi input multi output). Berikut algoritma dari LQR:
3.3 Sistem Pemodelan
Sistem pemodelan dari quadrotor sebagai berikut [11]:
IV. PENGUJIAN SISTEM DAN ANALISIS
Pengujian sensor accelerometer dan gyroscope dilakukan dengan pergerakan sudut dari quadrotor. Berikut beberapa data yang diuji:
Gambar 10. Pengujian sensor dengan pergerakan terpisah
Gambar 11. Pengujian sensor dengan pergerakan terus-menerus
V.
KESIMPULAN
Kalman filter sangat diperlukan dalam pengambilan data accelerometer dan gyro meter.Pengetesan gerak mekanik perlu dilakukan untuk mencari gerak aeromeodeling dari quadrotor.
DAFTAR REFERENSI
[1]<URL: http://www.nano2.nl/info/2610.pdf>
[2] …, 2003, ATMEGA 16 ,
<URL:http://www.atmel.com/ >, p 1
[3] H.Barnett Richard, Cox Sarah,O’Cull Larry, 2006, Embedded C Programming And The Atmel AVR, Cengage Learning.
[4]Winoto Ardi, 2008, Mikrokontroller AVR AT Mega8/32/16/8535 dan Pemrogramannya dengan Bahasa C pada WinAVR, Informatika, Bandung.
[5] …,2009,dimmer shcematics<URL:http://www.zonque.org> [6]..., 2008, Datasheet_LCD, <URL:http://www.digi-ware.com> [7] …,2009,PID controller,<URL:http://en.wikipedia.org> [8] Ogata, Katsuhiko,1991, Teknik Kontrol
Automatik – terjemahan: Ir. Edi Laksono, Erlangga, Jakarta.
[9] Robust Low Altitude Behavior Control of a Quadrotor Rotorcraft Through Sliding Modes: Mehmet ¨Onder Efe1.
[10] Quadrotor Helicopter Trajectory Tracking Control : Gabriel M. Ho_mann.
[11] Full Control of a Quadrotor: Samir bouabdallah and Roland Siegwart Autonomous Systems Lab Swiss Federal Institute of Technology, ETHZ Z¨urich, Switzerland
BIOGRAFI
Irfan Mauludin Nurdiansyah adalah anak yang dilahirkan di Malang, 10 November 1986. Pertama kali bersekolah di TA. Panglima Sudirman dilanjutkan ke SD Sumbersekar III lalu melanjutkan di SLTPN 1 Batu. Penulis menempuh jenjang pendidikan selanjutnya di SMAN 1 Batu. Pada tahun 2004 penulis diterima di jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember Surabaya dan mengambil konsentrasi Bidang Studi Elektronika pada Jurusan Teknik Elektro ITS Surabaya sebagai pilihan terbaik. Selain akitf sebagai asisten praktikum, penulis juga aktif di Tim Robot ITS dari tahun 2005-2010.
e-mail : [email protected] .