KATA PENGANTAR
Puji syukur kehadirat Allah SWT yang telah melimpahkan rahmatNya sehingga kami dapat menyelesaikan Buku Ajar Mata Kuliah Dinamika Struktur ini. Buku ajar ini merupakan bagian dari media bahan ajar yang dimaksudkan untuk meningkatkan pemahaman mahasiswa terhadap materi perkuliahan yang disampaikan, khususnya mata kuliah Dinamika Struktur, Jurusan Teknik Sipil, Fakultas Teknik, Universitas Brawijaya, Malang.
Buku ajar ini disusun dalam enam bab. Bab I memperkenalkan konsep-konsep dasar mengenai dinamika struktur, respon struktur terhadap beban dinamik, analisa dinamis pada struktur, serta derajat kebebasan. Bab II membahas sistem berderajat kebebasan tunggal (SDOF) yang meliputi pemodelan parameter, pemodelan matematis, free body diagram, dan persamaan gerak dari suatu struktur. Getaran bebas sistem SDOF untuk kondisi tak teredam dan teredam dibahas pada bab III. Selain itu juga dijelaskan mengenai eksperimen penentuan frekuensi alami dasar dan faktor damping, serta getaran bebas dengan coulomb damping dari sebuah sistem SDOF. Sistem SDOF terhadap gerak harmonis untuk sistem tak teredam dan sistem dengan redaman viskous dijelaskan pada bab IV. Bab V membahas respon sistem SDOF terhadap bentuk spasial dari eksitasi, meliputi respon sistem redaman viskous untuk step input ideal, respon sistem tak teredam pada rectangular pulse dan pembebanan ram, serta impuls dengan durasi pendek, unit respon impuls. Bab VI dibahas tentang respon sistem SDOF pada eksitasi dinamis dengan metode integral duhamel. Akhirnya, pada bab VIII dan IX membahas mengenai sistem berderajat kebebasan banyak (MDOF).
Kami menyadari bahwa dalam penyusunan buku ajar ini masih terdapat banyak kekurangan. Oleh karena itu, kritik dan saran yang konstruktif sangat kami harapkan. Semoga buku ini dapat memberikan manfaat kepada siapapun yang ingin mengkaji dinamika struktur.
Hormat kami,
DAFTAR ISI
KATA PENGANTAR ... i
DAFTAR ISI ... ii
BAB I PENDAHULUAN ... 1
1.1 Pendahuluan mengenai Dinamika Struktur ... 1
1.2 Analisa Dinamis pada Struktur ... 2
1.3 Derajat Kebebasan (Degrees of Freedom) ... 4
BAB II SISTEM BERDERAJAT KEBEBASAN TUNGGAL (SDOF) ... 6
2.1 Pemodelan Parameter ... 6
2.2 Pemodelan Matematis ... 7
2.3 Free Body Diagram ... 9
2.4 Persamaan Gerak (Equation of Motion) ... 10
2.4.1 Aplikasi dari Hukum Newton Pada Model-model Lumped Parameter... 10
2.4.2 Prinsip D’Alembert ... 12
2.4.3 Solusi Persamaan Gerak SDOF Tak Teredam (Undamped) ... 15
2.4.4 Persamaan Gerak SDOF Teredam (Damped) ... 20
BAB III GETARAN BEBAS SISTEM SDOF ... 21
3.1 Pendahuluan ... 21
3.2 Getaran Bebas Pada Sistem SDOF Tak Teredam (Undamped) ... 22
3.3 Getaran Bebas Pada Sistem SDOF Teredam (Damped) ... 23
3.4 Eksperimen Penentuan dari Frekuensi Alami Dasar dan Faktor Damping dari sebuah sistem SDOF ... 26
3.5 Getaran Bebas dari sebuah sistem SDOF dengan Coloumb Damping ... 32
BAB IVRESPON SISTEM SDOF TERHADAP GERAK HARMONIS ... 35
4.1 Respon Sistem SDOF Tak Teredam Terhadap Gerakan Harmonis ... 35
4.2 Respon Sistem SDOF Redaman Viskous Terhadap Gerakan Harmonis ... 39
BAB V Respon Sistem SDOF Terhadap Bentuk Spesial Dari Eksitasi ... 44
5.1 Respon Dari Sebuah Viscous-Damped System SDOF Untuk Sebuah Step Input yang Ideal... 44
5.2 Persamaan Respon dari sebuah Sistem Undamped SDOF pada Rectangular Pulse dan Pembebanan Ram ... 45
5.3 Respon Dari Sistem SDOF Tak Teredam untuk Impuls dengan Durasi Pendek,
Unit Respon Impuls ... 49
BAB VI Respon System SDOF pada Eksitasi Dinamis ... 53
6.1 Metode Integral Duhamel ... 53
BAB VII Respons Spektrum ... 62
7.1 Bentuk Respons Spektrum ... 62
7.2 Respons Spektrum pada Pondasi yang Bergerak ... 65
7.3 Besaran- Besaran Respons Spektrum ... 66
7.4 Respons Spektrum untuk Perencanaan Elastis ... 68
BAB VIII SISTEM BERDERAJAT KEBEBASAN BANYAK (MDOF) ... 70
8.1 Sistem MDOF Sederhana ... 70
8.2 Hukum Newton Kedua pada Sistem MDOF ... 70
8.3 Prinsip D’Alembert’s pada Sistem MDOF ... 71
8.4 Sistem Massa – Pegas – Redaman ... 72
8.5 Koefisien Kekakuan ... 74
BAB IX GETARAN BEBAS UNTUK SISTEM MDOF ... 77
9.1 Sistem MDOF Tak Teredam ... 77
9.2 Frekuensi Natural dan Pola Normal ... 78
9.3 Sifat Ortogonalitas dari Pola Normal ... 79
9.4 Solusi Persamaan Getaran Bebas pada Sistem Tak teredam ... 83
BAB I PENDAHULUAN
1.1 Pendahuluan mengenai Dinamika Struktur
Secara sederhana dinamik dapat diartikan sebagai variasi atau perubahan terhadap waktu dalam konteks gaya yang bekerja (eksitasi) pada struktur. Beban dinamis dapat berupa variasi besarannya (magnitude), arahnya (direction) atau posisinya (point of application) berubah terhadap waktu. Demikian pula respons struktur terhadap beban dinamik, yaitu lendutan dan tegangan yang dihasilkan juga perubahan-waktu, atau bersifat dinamik.
Gambar 1.1. Balok kantilever dengan (a) beban statis dan (b) beban dinamis.
Pada gambar diatas terlihat balok kantilever dengan dua jenis pembebanan berbeda yaitu beban statis dan dinamis.
a. gambar 1.1 (a) menunjukan balok kantilever dengan beban statis, responnya dipengaruhi oleh beban P.
b. gambar 1.1 (b) menunjukan balok kantilever dengan beban dinamis atau beban yang bervariasi terhadap waktu P(t).
Lendutan dan tegangan internal yang timbul dalam kasus beban statis hanya ditimbulkan langsung oleh beban P, sedangkan dalam kasus beban dinamis, percepatan yang dialami oleh balok akibat P(t) menimbulkan gaya inersia yang terdistribusi pada seluruh bagian balok. Lendutan dan tegangan pada balok sangat dipengaruhi pula oleh gaya inersia yang ditimbulkan oleh massa balok ketika mengalami percepatan. Jika pengaruh gaya inersia yang terjadi sangat signifikan, maka perlu dilakukan analisa dinamis. Perbedaan respon untuk beban statis dan dinamis juga dapat dilihat pada gambar 1.2 berikut.
P(t)
P
Gambar 1.2. Balok dengan (a) beban statis dan (b) beban dinamis
1.2 Analisa Dinamis pada Struktur
Dapat dikatakan bahwa langkah yang paling diperlukan dalam sebuah analisa dinamis adalah pemodelan matematis. Namun secara keseluruhan langkah-langkah dalam analisa dinamis dapat dilihat pada gambar berikut.
Gambar 1.3. Langkah-langkah dalam analisa dinamis.
DINAMIS STATIS
Model analitis terdiri dari:
a. Asumsi sederhana yang dibuat untuk menyederhanakan suatu sistem. b. Gambar dari model analitis tersebut.
c. Daftar parameter desain.
Model analitis terbagi dalam dua kategori dasar : a. Model berkesinambungan (continues model) b. Model diskrit (discrete-parameter model)
Model berkesinambungan (continues model) mempunyai jumlah derajat kebebasan (number of DOF) tak berhingga. Namun dengan proses idealisasi, sebuah model matematis dapat mereduksi jumlah derajat kebebasan menjadi suatu jumlah diskrit.
Gambar 1.4. Model analitis berkesinambungan (continues) dan diskrit (discrete-parameter)
pada sebuah balok kantilever.
Model berkesinambungan (continues model) pada gambar 1.4(a) menunjukan jumlah derajat kebebasan tak berhingga, model diskrit pada gambar 1.4 (b) dan (c) ditunjukan dengan model massa terkelompok (lumped-mass model) dimana massa terbagi rata dari sistem dianggap sebagai massa titik atau partikel.
(a)
(b)
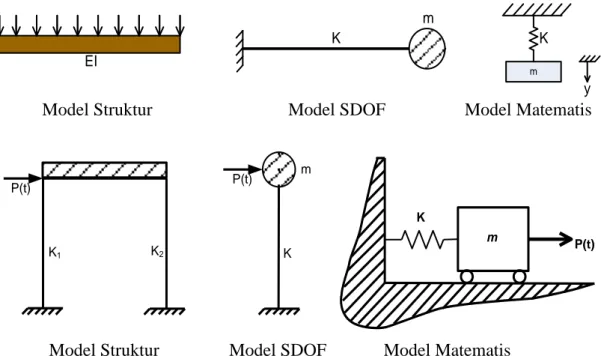
1.3 Derajat Kebebasan (Degrees of Freedom)
Jumlah koordinat bebas yang menetapkan susunan atau posisi sistem pada setiap saat. Model Struktur Model SDOF Model MDOF Model Struktur Model SDOF Model MDOF
Gambar 1.5. Beberapa model struktur dengan derajat kebebasan SDOF (Single Degree of
Freedom) dan MDOF (Multiple Degree of Freedom).
Model Struktur Model SDOF Model MDOF
) (u2 u1 c
fD
BAB II SISTEM BERDERAJAT KEBEBASAN TUNGGAL
(SDOF)
2.1 Pemodelan Parameter
Komponen-komponen yang merupakan pemodelan himpunan parameter dari sebuah struktur adalah sesuatu yang menghubungkan gaya dengan
perpindahan, kecepatan, dan percepatan. Komponen yang menghubungkan gaya
dengan perpindahan disebut pegas.Gambar 2.1 menunjukkan idealisasi pegas tak bermassa dan plot gaya dari pegas terhadap regangan. Gaya pegas selalu bekerja sepanjang garis hubung kedua ujung pegas.
Hubungan linier antara gaya dan regangan dinyatakan :
fs = k e
dimana, k adalah konstanta pegas. Besaran k adalah pound/inc (lb/in) atau N/m. Energi tegangan dinyatakan dengan
V = ½ (k e2)
Gambar 2.1. Gaya-deformasi pada pegas.
dimana energi tegangan dinyatakan sebagai area dibawah kurva fs terhadap e. Model analitis yang paling umum dari redaman dalam analisa dinamika struktur adalah model tahanan dashpot, yang dapat diilustrasikan pada gambar 2.2.
Gambar 2.2. Model tahanan dashpot.
Gaya redaman fD dinyatakan :
Dari fungsi linear dari kecepatan relatif antara dua ujung dashpot.
………(2.1)
………(2.2)
Konstanta c disebut koefisien viscositas redaman dan besarannya adalah pond/inc/detik atau N/m/detik. Dalam menulis persamaan gerak dari partikel, hukum kedua dari Newton digunakan,
dimana m adalah massa dan a adalah percepatan relatif dari suatu bidang referensi inersia. Besaran massa adalah lb.det/in atau N.det/in.
Untuk permasalahan dinamika struktur seringkali sangat berguna untuk memperkenalkan gaya inersia.
Kemudian persamaan 2.4 bisa ditulis sebagai persamaan dinamik yang semisal :
dengan resultan gaya inersia yang ditambahkan pada resultan gaya lain yang bekerja pada partikel.
2.2 Pemodelan Matematis
Model matematis dalam analisa dinamika struktur mempunyai beberapa elemen sebagai berikut:
massa m menyatakan massa dan sifat inersia dari struktur
pegas k menyatakan gaya balik elastic dan kapasitas energy potensial dari struktur
redaman c menyatakan sifat geseran dan kehilangan energy dari struktur gaya pengaruh F(t) menyatakan gaya luar yang bekerja pada sistem
struktur sebagai fungsi dari waktu.
Namun dalam pembahasan dinamika struktur dengan analisa sederhana pada sistem berderajat kebebasan tunggal, redaman c diabaikan. Beberapa contoh model matematis pada struktur dapat dilihat pada gambar berikut.
ma fl ………(2.4) ma F ………(2.5)
F'fl F 0 ………(2.6)P(t) P(t) K K1 K2 m P(t) m K Fs y Fs (gaya) y (perpindahan) hard spring linier spring soft spring K m m K y EI
Gambar 2.3. Model matematis sistem berderajat kebebasan tunggal.
Pada model diatas, massa m dihambat oleh pegas k dan bergerak menurut garis lurus sepanjang satu sumber koordinat. Karakteristik mekanis pegas digambarkan antara gaya Fs pada ujung pegas dan hasil perpindahan y dapat dilihat pada gambar 2.4 (a) sedangkan tiga jenis pegas ditunjukan secara grafis pada gambar 2.4 (b).
Gambar 2.4. Hubungan gaya dan perpindahan pada pegas.
Lengkungan pada pegas kuat (hard spring) menyatakan sifat dimana gaya harus memberikan pengaruh lebih besar untuk suatu perpindahan yang diisyaratkan seiring dengan terdeformasinya pegas. Karakteristik garis lurus pada pegas liniear (linear spring) menggambarkan deformasi yang selaras dengan gaya. Konstanta keselarasan antara gaya dan perpindahan dari pegas linier disebut konstanta pegas (spring constant) k. Sedangkan pada pegas lemah (soft spring),
Model Struktur Model SDOF Model Matematis
Model Struktur Model SDOF Model Matematis
(a)
m y K2 K1 P
y
K1 K2 2 1 1 1 1 k k ke 2 1 k k ke i n i e k k
1 i n i e k k 1 1 1
P(t) m K P(t)f
sI
pertambahan gaya untuk memperbesar perpindahan cenderung mengecil pada saat deformasi pegas menjadi makin besar.
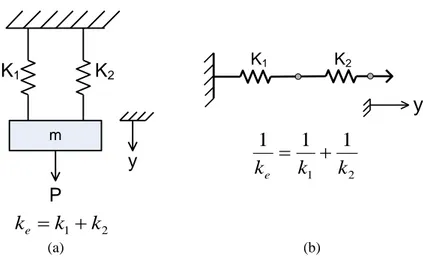
Jika suatu pegas terpasang secara paralel atau seri, maka diperlukan penentuan konstanta pegas ekivalen dari sistem tersebut.
(a) (b)
Gambar 2.5. Kombinasi pegas (a) pegas paralel (b) pegas seri.
Untuk n pegas yang dipasang parallel, konstanta pegas ekivalennya:
Sedangkan untuk n pegas yang terpasang seri :
2.3 Free Body Diagram
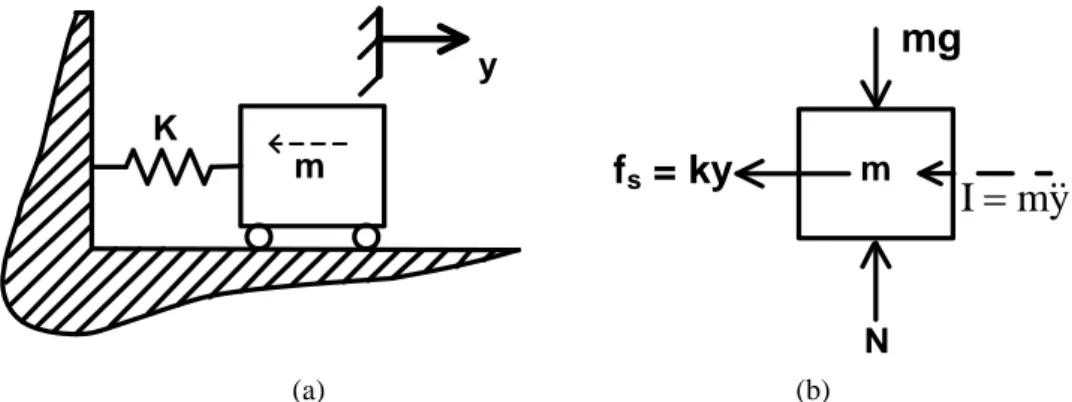
Salah satu aspek yang penting dalam analisis dinamis adalah menggambar sebuah diagram free body dari sistem yang memungkinkan penulisan besaran matematik dari sistem tersebut. Free Body Diagram (FBD) adalah suatu sketsa dari benda yang dipisahkan dari benda lainnya, dimana semua gaya luar pada benda terlihat jelas. Sebagai contoh dapat dilihat pada gambar berikut:
Gambar 2.6. Free Body Diagram dari sebuah sistem berderajat kebebasan tunggal.
………(2.7)
Dari gambar free body diagram diatas, menunjukan bahwa massa m yang dipindahkan dengan adanya gaya luar sebesar P(t), dan memberikan gaya pegas sebesar Fs=ky serta gaya inersia I.
2.4 Persamaan Gerak (Equation of Motion)
Pada bagian ini persamaan gerakan dari beberapa model lumped parameter akan diturunkan dengan menggunakan hukum Newton atau yang ekivalen, metode gaya D’Alembert. Hal ini akan berlaku sebagai review atas pelajaran sebelumnya pada dinamika dan juga memperkenalkan prosedur yang digunakan dalam menentukan model matematis dari sistem SDOF.
2.4.1 Aplikasi dari Hukum Newton Pada Model-model Lumped Parameter Untuk menentukan gerak pada sebuah sistem, yaitu mempelajari perpindahan atau kecepatan massa m pada saat t untuk kondisi awal pada saat
0
t . Hubungan antara perpindahan dan waktu diberikan oleh Hukum Newton Kedua untuk gerak yang ditulis pada persamaan (2.4), dimana F adalah resultan gaya yang bekerja pada partikel massa m dan a adalah resultan percepatan. Persamaan diatas merupakan persamaan vector yang dapat ditulis dalam bentuk ekivalen, dalam besaran komponennya menurut sumbu koordinat.
z z y y x x ma F ma F ma F
Contoh 2.1Gunakan hukum Newton untuk menurunkan persamaan gerakan dari sistem pegas sederhana dan dashpot massa di bawah ini. Asumsikan hanya ada gerakan vertikal. Dan asumsikan bahwa pegas linier dengan konstanta pegas k. Abaikan gesekan udara, massa pegas, dan redaman dalam pegas. P(t) adalah gaya yang bekerja pada massa dari luar.
Solusi:
Tentukan bidang referensi dan koordinat perpindahan. Pilih sumbu x sepanjang garis pergerakan dan tentukan titik acuan awal (misal x = 0) pada lokasi dimana pegas tidak teregang. u adalah perpindahan pada arah x.
Gambar diagram free body dari partikel.
Gunakan hukum Newton yang kedua
u m Fx
(catatan : tanda + menunjukkan arah ke bawah dimana u adalah positif untuk arah ke bawah).
Dari diagram free body, tentukan gaya-gaya pada bagian kanan persamaan (2.10)
u m W fd fs p
Hubungkan gaya dengan sistem variabel gerakan
u c e c fd ku ke fs
Gabungkan dan susunlah variabel yang tidak diketahui di bagian kanan pada persamaan ) (t p W ku u c u m
(Catat bahwa ini adalah persamaan diferensial ordiner ordo dua, linier, non homogen dengan koefisien konstan).
Persamaan ini bisa disederhanakan dengan pertimbangan sebagai berikut.
Perpindahan statis dari bobot w dinyatakan sebagai perpindahan dari massa terukur berhubungan dengan posisi setimbang, statis sebagai ur sehingga
st r u u u
dimana ust adalah konstan, persamaan (2.14) bisa ditulis sebagai :
………(2.10) ………(2.11) ………(2.12) ………(2.13) ………(2.14) ………(2.15)
) (t p ku u c u mr r r
Persamaan (2.16)pada contoh 2.1 bisa dipertimbangkan sebagai persamaan dasar pada dinamika struktur dan teori getaran linier. Akan diperlukan waktu yang lama untuk menetukan solusinya dan aplikasinya pada soal-soal dinamika struktur, baik sistem SDOF maupun MDOF. Pada contoh 2.1, hukum Newton yang kedua digunakan langsung, sehingga tidak ada gaya inersia yang diperlihatkan pada diagram free body.
2.4.2 Prinsip D’Alembert
Alternatif pendekatan untuk mendapatkan persamaan gerak adalah penggunaan Prinsip D’Alembert yang menyatakan bahwa sebuah sistem dapat dibuat dalam keadaan keseimbangan dinamis dengan menambahkan sebuah gaya fiktif pada gaya-gaya luar yang disebut sebagai gaya inersia.
y m K
f
s= ky
m Ny
m
I
mg
(a) (b)Gambar 2.7. Sistem berderajat kebebasan tunggal, (a) model matematis dan
(b) diagram Free Body.
Penggunaan Prinsip D’Alembert memungkinkan pemakaian persamaan keseimbangan untuk mendapatkan persamaan gerak. Pada gambar free body diagram diatas dapat dilihat bahwa jumlah gaya-gaya pada arah y memberikan persamaan 0 0 0
ky y m I f H s Dengan: y = simpangan 2 2 dt y d y = percepatan m = massa k = kekakuan elemen ………(2.16)K m yo K1 m y K1 W I A B C Satuan: 2 sec sec 386 2 in g lb g w m in lb k in Keterangan: Kondisi (B) Statis fs m W o y k W fs W W fs V . 0 0
: Pegas belum dibebani : Pegas dibebani (statis) : Pegas dibebani (dinamis) CB A
o o o o o o y k y m y k y k y k y m y y k W I fs y k W y m I y y k fs W I fs V . . . . . . . . 0
m W fs I Kondisi (C) Dinamis0
.
.
y
k
y
m
→ Persamaan gerak (Equation of Motion)Untuk menunjukkan kegunaan gaya inersia dan juga mengilustrasikan fungsi utama eksitasi terdukung atau gerakan dasar, seperti struktur gedung yang akan mengalaminya selama gempa bumi, dapat dilihat pada contoh 2.2 .
Contoh 2.2
Gunakan metode gaya D’Alembert untuk menentukan persamaan gerakan dari massa m, asumsikan bahwa gaya redaman pada sistem bisa diwakili dengan viskous dashpot linier seperti yang diperlihatkan pada gambar di bawah.
Asumsikan bahwa eksitasi terdukung z(t) diketahui. ketika u = z = 0, pegas belum diregangkan.
Solusi:
Gambarkan diagram free body dari massa termasuk gaya inersia bersama dengan gaya sesungguhnya.
m2k
0 0 t Cos A Tulis persamaan kesetimbangan dinamis
F'x 0
Dari diagram freebody didapat 0 fs fd mu p
Hubungkan gaya dengan variable gerakan dan sederhanakan
p z u k z u c u m () ( )
Ingat bahwa gaya redaman dan gaya pegas yang dihubungkan dengan gerakan dari massa mempunyai hubungan dengan gerakan yang terdukung.
Persamaan (2.19) bisa dituliskan dengan semua nilai yang diketahui dari bagian kanan persamaan. p kz z c ku u c u m
Persamaan (2.20) adalah persamaan dari gerakan dari perpindahan aktual dari massa yang berada dalam kerangka acuan inersia yakni untuk u(t)
z u w
Dengan mengalihkan m zpada persamaan (2.19) dan menggunakan persamaan (2.21) bisa didapatkan persamaan berikut :
z m p kw w c w m
2.4.3 Solusi Persamaan Gerak SDOF Tak Teredam (Undamped)
Persamaan gerak untuk sistem berderajat kebebasan tunggal tak teredam adalah 0 . .yk y m Misal solusi: t A y t A y sin cos
Kita menganggap bahwa solusi pada persamaan (2.23) adalah persamaan (2.24)
t A y t A y t A y cos sin cos 2
Substitusikan persamaan (2.24) dan (2.26) kedalam persamaan (2.23)
0 0 . 0 . . 2 2 t Cos A k m t Cos A k t Cos A m y k y m Sehingga: m k k m 2 2 0 ………(2.23) ………(2.24) ………(2.25) ………(2.17) ………(2.18) ………(2.19) ………(2.20) ………(2.21) ………(2.22) ………(2.26)m k
→ Frekuensi Alami Struktur [rad/dt]
Sebenarnya persamaan (2.25) juga solusi, maka solusi umumnya adalah:
t Cos B t Sin A y t Sin B t Cos A y
Jika dimasukkan masalah kondisi awal (t = 0) yaitu: Perpindahan awal : y
t y 0 yoKecepatan awal : y
t y 0 VoMaka substitusi persamaan (2.30) ke dalam persamaan (2.28) didapat:
o y A
Substitusi persamaan (2.31) dan (2.32) ke dalam persamaan (2.29), maka didapat:
o
V B
Substitusi persamaan (2.32) dan (2.33) ke dalam persamaan (2.29), maka didapat:
t Sin V t Cos y y o o atau
CSin t y dengan: o o o o V y V y C tan 2 2Gambar 2.8. Respon getaran bebas tak teredam.
2 1 T
f → Frekuensi Alami [Siklus/dt]
2 T → Periode Getar ………(2.27) ………(2.28) ………(2.29) ………(2.30) ………(2.31) ………(2.32) ………(2.33)
Contoh 2.3 F(t) F(t) W8x24 m 200 lb/ft 15 ft SDOF F(t) m K y fs m F(t) I Persamaan Kesetimbangan:
t F fs I
t F y k y m. . (Equation of Motion)
sps f dt rad m k g W m in lb L I E K 46 . 4 5000 386 . 185 , 10 2 1 2 / 5000 386 . 185 , 10 386 5000 / 185 , 10 12 . 15 5 , 82 . 2 10 . 30 . 12 2 12 3 6 3 Model Struktur : E = 30.106 psi I = 82,5 in4 W = 200 x 25 = 5000 lb g = 386 ft/dt2 Model MatematisLatihan.
Jika: Simpangan awal y
0 0,001 ft Kecepatan awal y
0 0,1ft/dtGaya luar F(t)
yo P o o y P K y K P . yo P EI 3 3 3 48 48 48 L EI EI PL P y P K EI PL y o o EI yo h P 3 3 3 12 12 12 h EI EI Ph P y P K EI Ph y o o EI yo L P 3 3 3 3 3 3 L EI EI Pl P y P K EI Pl y o o
yo h P h EA EA Ph P y P K EA Ph y o o m P(t) K2 K1 K,c m P(t) P(t) m y K I c
t P ky y c y m ky f y c f y m I t P f f I H s d s d ) ( 02.4.4 Persamaan Gerak SDOF Teredam (Damped)
Pada pembahasan sebelumnya telah dijelaskan beberapa cara untuk memeperoleh persamaan gerak untuk SDOF teredam. Struktur yang dimodelisasikan sebagai sistem sederhana dengan redaman-liat (viscous-damping), seperti pada gambar berikut:
(a) (b) (c)
Gambar 2.9. Sistem SDOF teredam, (a) model struktur, (b) model SDOF, dan
(c) model matematis.
Free Body Diagram
P(t) I
fs
fd
BAB III GETARAN BEBAS SISTEM SDOF
3.1 Pendahuluan
Pada semua kasus, persamaan gerak sistem linier berderajat kebebasan tunggal mempunyai bentuk
) (t p ku u c u m
Perpindahan dan kecepatan pada saat t = 0 adalah
o
o u u
u
u(0) , (0)
dimana, u dan o u adalah perpindahan awal dan kecepatan awal. o
Persamaan (3.1) dapat ditulis kembali menjadi
) ( 2 2 2 t p k u u u n n n dimana m k n 2 dan cr c c km k m c n n cr 2 2 2
Untuk getaran bebas →P(t) = 0, maka persamaan (3.1) dan (3.3) menjadi: 0 cu ku u m 0 2 2 u u u n n n
adalah frekuensi alami sudut tak teredam (rad/s), adalah faktor redaman liat dan c adalah koefisien redaman kritis. cr
Respon total: ) ( ) ( ) (t u t u t u p c
Di dalam istilah matematika, penyelesaian umum dari persamaan diferensial terdiri dari penyelesaian sesungguhnya up(t) dan penyelesaian
komplemen/pelengkap uc(t). Untuk memenuhi persamaan (3.4) dan (3.5), maka
digunakan asumsi t s e C u
Dengan mensubstitusikan persamaan (3.7) kedalam (3.5), maka diperoleh
2 2 2
st 0n ns Ce
s
Agar persamaan (3.8) valid untuk semua nilai t, kita harus menentukan
0 2 2 2 n ns s ………(3.1) ………(3.2) ………(3.3) ………(3.4) ………(3.5) ………(3.6) ………(3.7) ………(3.8) ………(3.9)
3.2 Getaran Bebas Pada Sistem SDOF Tak Teredam (Undamped)
Persamaan gerak untuk sistem berderajat kebebasan tunggal (SDOF) tak teredam adalah 0 2 u u n
Dan persamaan karakteristik yang sesuai adalah
0
2 2
n
s
Akar dari persamaan adalah
1 -i dimana 2 , 1 i n s
Jika akar-akar tersebut di substitusikan ke persamaan (3.7), kita mendapat penyelesaian umum t i t i n C e n e C u 1 2
dengan memperkenalkan persamaman Euler :
sin cos i ei
kita dapat menulis ulang persamaan (3.13) dalam bentuk fungsi trigonometri, yaitu t A t A u 1cosn 2sinn
dimana A1 dan A2 adalah konstanta real untuk ditentukan dari kondisi awal yaitu persamaan 3.2. Persamaan 3.2 dan 3.15 mengacu pada
n o o A u u A u u 2 1 ) 0 ( ) 0 ( jadi, t u t u u n n o n ocos sin
adalah respon getaran bebas dari sistem SDOF tak teredam.
Pertama-tama dengan mempertimbangkan kasus dari sebuah sistem yang menggantikan dari posisinya yang seimbang dengan jumlah uo dan dibebaskan. Kemudian u(0) = 0 , jadi
t u
u ocosn
Gambar 3.1. Getaran bebas dari sistem SDOF tak teredam dengan (0) 0 . u . ………(3.10) ………(3.11) ………(3.12) ………(3.13) ………(3.14) ………(3.15) ………(3.16) ………(3.17) ………(3.18)
1
s s2
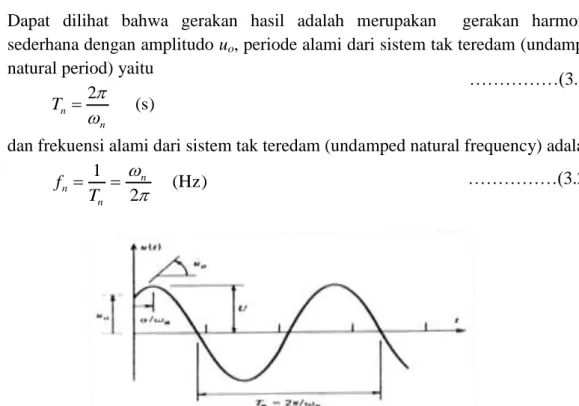
Dapat dilihat bahwa gerakan hasil adalah merupakan gerakan harmonik sederhana dengan amplitudo uo, periode alami dari sistem tak teredam (undamped
natural period) yaitu
(s) 2 n n T
dan frekuensi alami dari sistem tak teredam (undamped natural frequency) adalah
(Hz) 2 1 n n n T f
Gambar 3.2. Respon getaran bebas secara umum dari sistem SDOF tak teredam.
Gambar diatas menunjukkan sebuah plot dari persamaan (3.17) apabila u o
ataupun u adalah 0 (nol). Hal ini tetap merupakan gerakan harmonik sederhana o
dengan periode Tn u(t) dapat diekspresikan dengan persamaan (3.17) atau dengan
persamaan n n nt U U t u ) cos 1 cos( ) (
3.3 Getaran Bebas Pada Sistem SDOF Teredam (Damped) Persamaan (3.5) ditulis kembali disini :
0
2 2
u u
u n n
Mengasumsi kembali sebuah solusi dari bentuk :
t s t s t s e C s u e C s u e C u 2
dan kita akan mendapatkan persamaan karakteristik : 0 2 2 2 n ns s
nilai dan adalah
1 2 2 , 1 nn s ………(3.19) ………(3.20) ………(3.21) ………(3.22) ………(3.23) ………(3.24) ………(3.25)
0 0dan u
u
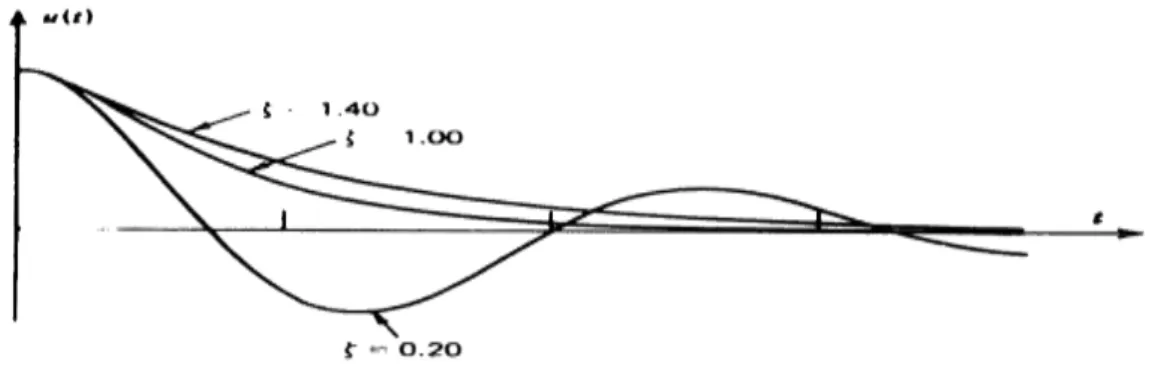
Besarnya faktor "damping" () dapat digunakan untuk membedakan 3 kasus, yaitu underdamped (0 < < 1), critically damped ( = 1), dan overdamped ( 1). Respon pada sistem SDOF teredam dengan beberapa variasi nilai redaman dapat dilihat pada gambar berikut.
Gambar 3.3. Respon dari sistem SDOF dengan redaman viskous dan variasi tingkat redaman.
Kasus Underdamped (ζ<1) (redaman subkritis)
Untuk < 1, lebih mudah bila menulis persamaan (3.25) dalam bentuk
d n i
s1,2
dimana adalah unit imajiner dan d adalah frekuensi alami "damped
circular" yang diberikan oleh 2
1
d n
periode redaman (Td) adalah d d T 2
Dengan bantuan dari formula Euler, penyelesaian umum, u(t), dapat ditulis dalam bentuk ) sin cos ( ) (t e A1 t A2 t u d d t n
digunakan untuk mengevaluasi A1 dan A2 , dengan hasil:
) sin cos ) ( A2 t u u t u e t u d d o n o d o t n
persamaan (3.30) dapat ditulis dalam bentuk:
) cos( ) (t Ue t u d t n 2 0 0 2 0 d nu u u U
jika harga ζ=20%, maka pada persamaan (3.27)
n d 0,98 n d ………(3.26) ………(3.27) ………(3.28) ………(3.29) ………(3.30) ………(3.31) ………(3.32) ………(3.33) 1 i
Substitusi persamaan (3.33) ke dalam persamaan (3.30), maka solusi gerak dapat digambarkan sebagai berikut
Gambar 3.4. Respon getaran bebas dari sistem redaman subkritis.
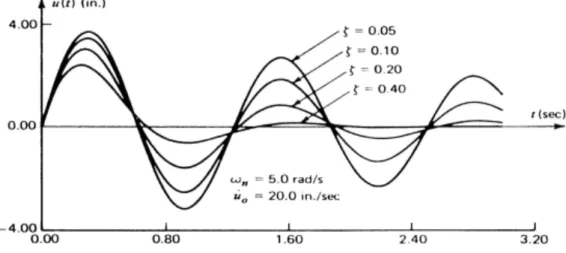
Gambar berikut menunjukkan perbandingan antara respon-respon dari sistem-sistem SDOF mempunyai level-level yang berbeda dalam redaman
subkritis. Dalam tiap kasus, karena uo = 0, respon yang didapat adalah
Gambar 3.5. Pengaruh dari tingkat redaman pada getaran bebas.
Walaupun nilai dari mempunyai efek pada frekuensi, d, efek yang paling
berat dari damping adalah pada angka pada saat gerakan menyusut, yaitu pada waktu e-dt. Efek ini akan dibahas lebih lanjut pada bagian 3.4, yang membahas ukuran dari damping.
Kasus Critically-damped (ζ=1) (redaman kritis)
Ketika ζ=1 maka persamaan (3.25) menjadi
n
s1,2
Sehingga responnya menjadi:
t n e t C C t u( )( 1 2 )
Ketika kondisi awal diperhitungkan, maka respon dari sistem redaman kritis adalah: t o n o o n e t u u u t u( )[ ( ) ]
Gambar 3.6. Respon getaran bebas pada redaman kritis.
Kasus Overdamped (ζ>1) (redaman superkritis)
Pada sistem redaman superkritis, koefisien redamannya lebih besar dari koefisien redaman kritis yaitu
1
cr
c c
3.4 Eksperimen Penentuan dari Frekuensi Alami Dasar dan Faktor Damping dari sebuah sistem SDOF
Metode eksperimen biasa dipakai untuk variabel dinamis pada suatu sistem (misal: frekuensi alami dan faktor redaman). Nilai konstanta pegas (k) dan massa (m) dari sistem SDOF sederhana dapat diukur secara langsung. Namun nilai faktor redaman sering berubah sehingga perlu pengukuran yang lebih teliti. Bila faktor redaman diketahui, maka koefisien redaman bisa dihitung menggunakan persamaan faktor redaman. Frekuensi alami dari sistem SDOF tak teredam dapat ditentukan secara langsung melalui pengukuran statis. Contoh perhitungannya seperti pada contoh 3.2 berikut.
………(3.34)
………(3.35)
………(3.36)
Contoh 3.1
Tentukan frekuensi natural dari sistem pegas-massa dengan menggunakan pengukuran perpindahan secara statis.
Solusi: k Lo k w ust fs=kust w
Dari persamaan frekuensi alami struktur, diperoleh persamaan
m k n 2
Persamaan keseimbangan massa yang tergantung pada pegas adalah
F 0 atau W fs 0
Dari persamaan gaya-perpindahan pada pegas
st s ku f
Kombinasi persamaan 3 dan 4
st n u g 2
apabila redaman dalam sistem kecil ( < 0.2), persamaan 3.32 menunjukkan bahwa nilai d kurang lebih sama dengan n. Sedangkan dari contoh 3.3 dapat
diketahui bagaimana sebuah eksperimen getaran bebas dapat digunakan untuk menentukan frekuensi alami dari sebuah sistem SDOF.
Contoh 3.2
Frekuensi natural dari balok kantilever dengan massa lumped (terpusat) bergerak dinamis. Massa bergerak dengan amplitudo A = 1 in kemudian dilepaskan. Gerakan yang terjadi ditunjukkan gambar di bawah yang (3) (1)
(2)
(4)
mengindikasikan bahwa redaman pada struktur sangat kecil. Hitung frekuensi natural dalam radian per detik dan hertz. Berapa periodenya?
Solusi:
Pada titik a, mass telah bergetar sepanjang 1,25 putaran.
Hz 125 . 3 4 . 0 putaran 25 . 1 s fn rad/s 6 . 19 ) 125 . 3 )( 28 . 6 ( 2 n n f s f T n n 0.32 125 . 3 1 1
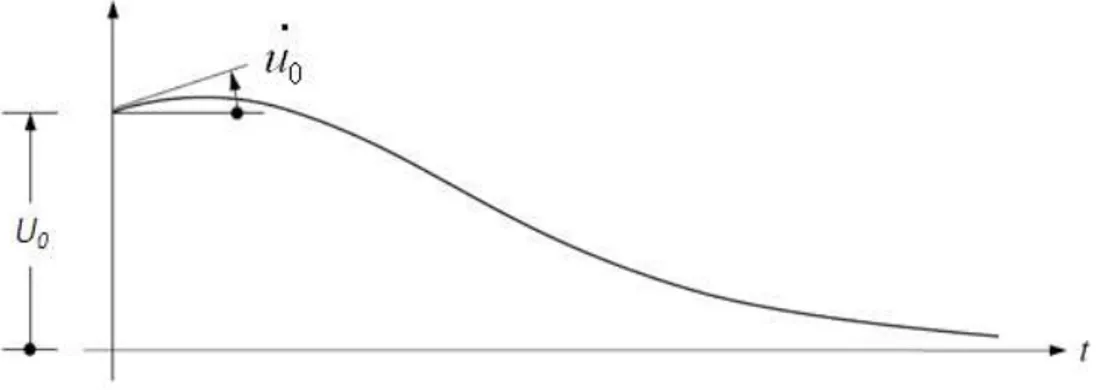
Terdapat dua metode yang hampir sama untuk menentukan faktor redaman ( ) menggunakan rekaman melemahnya getaran bebas dari sistem SDOF, yaitu metode pengurangan logaritmik dan metode setengah amplitudo dimana keduanya didasarkan pada persamaan 3.31.
Gambar 3.7. Rekaman melemahnya respon pada sistem teredam.
Pada metode setengah amplitudo, gerakan amplitudo (up) pada permulaan putaran dan amplitudo (uQ) pada akhir putaran diperkirakan besarnya. Pada akhir
periode (satu putaran) nilai cos
dt
kembali lagi ke nilai pada awal putaran. Dari persamaan 3.31, didapatkan rumus:d nT Q P e u u
Persamaan pengurangan logaritmik adalah:
d n Q P T u u ln
Dimana Td adalah periode natural teredam yang dirumuskan sebagai berikut.
2 1 2 2 n d d T
Dari persamaan 3.38 dan 3.39 didapatkan
2 1 2 nTd
Untuk faktor redaman kecil ( < 0,2), persamaan persamaan pengurangan logaritmik mendekati nilai
2
Sehingga faktor redaman dapat diketahui juga menggunakan persamaan
Q P U U ln 2 1
Prosedur yang sama juga dapat diterapkan pada metode setengah amplitudo, yang menghasilkan perhitungan lebih sederhana untuk faktor redaman. Metode setengah amplitudo didasarkan pada amplitudo dari kurva envelope.
t n Ue t
uˆ( )
Pada dua titik P dan R dimana:
2 ˆ ˆ P R u u
Titik-titik tersebut sejarak periode redaman N, dimana N bukan sebuah bilangan bulat. Selanjutnya, 2 ˆ ˆ nNTd R P e u u
Dari persamaan 3.40 dan 3.46 ) 2 ln( 1 2 2 N ………(3.38) ………(3.39) ………(3.40) ………(3.41) ………(3.42) ………(3.43) ………(3.44) ………(3.45) ………(3.46) ………(3.47)
m K
n
Gambar 3.8 menunjukkan hubungan antara dan N.
Gambar 3.8. Faktor redaman vs. jumlah putaran untuk mengurangi ampitudo sebesar 50%.
Untuk nilai faktor redaman yang kecil, 2<< 1, persamaan 3.47 menjadi: ) 2 ln( 2N Sehingga, N 11 . 0
Persamaan 3.49 memberikan cara yang mudah untuk memperkirakan redaman dalam sebuah sistem yang teredam secara ringan ( < 0.1, misal N > 1)
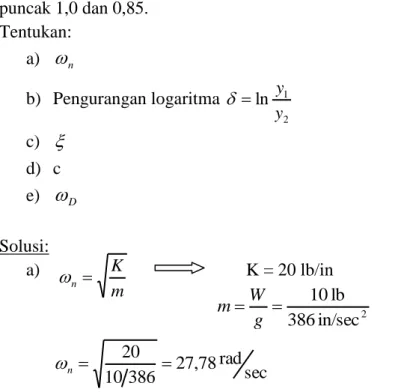
Contoh 3.3
Sebuah sistem bergetar terdiri dari berat W = 10 lb dan pegas dengan kekakuan K = 20 lb/in. Akibat redaman viskous (liat) sehingga terjadi amplitudo puncak 1,0 dan 0,85. Tentukan: a) n b) Pengurangan logaritma 2 1 ln y y c) d) c e)
D Solusi: a) K = 20 lb/in 2 in/sec 386 lb 10 g W m sec rad 78 , 27 386 10 20 n ………(3.48) ………(3.49)2 1 ln y y SPS f 4,42 2 78 , 27 2 b) y1 = 1,00 y2 = 0,85 165 , 0 85 , 0 0 , 1 ln c ) (untuk ξ kecil) 0,026 2 163 , 0 d ) cr c c
386 20 10 2 026 , 0 in dt lb 0,037 Contoh 3.4Gunakan metode setengah amplitudo untuk memperkirakan redaman dari sebuah sistem yang gerakannya terekam dalam gambar 3.10
Solusi:
Gambar sketsa dari kurva envelope (terdapat pada gambar)
Ambil titik P pada salah satu puncak dan ukur up up = 0,44 in
2 cr c c 386 20 10 2 2 k m ccr
Tempatkan titik R, dimana amplitudo dari kurvanya adalah up / 2 = 0,22 in Perkirakan jumlah putaran antara P dan R N = 2,25 putaran Gunakan persamaan 3.49 untuk memperkirakan :
049 . 0 25 . 2 11 . 0
Level redaman dalam suatu sistem juga tercermin dalam konstanta waktu, , yang didefinisikan sebagai waktu yang diperlukan amplitudo untuk berkurang sejumlah faktor 1/e. Persamaan untuk menghitung konstanta waktu dapat menggunakan langkah yang sama dengan langkah yang dipakai untuk penurunan persamaan pada metode setengah amplitudo. Gunakan kurva envelope pada gambar 3.7 lagi, tentukan titik S dimana:
e e u u u u P P S P ) / 1 ( Jadi, e t U t U u u P n P n S P )] ( exp[ ) exp( Atau, e en
Dengan menggunakan logaitma pada kedua sisi, kita dapatkan: 1
n
Selanjutnya konstanta waktu, , didapat dengan persamaan: 2 1 n n T
Dari persamaan 1/e = 1 / 2,718 = 0,368. Maka, konstanta waktu, ,adalah waktu yang diperlukan amplitudo gerakan untuk berkurang sekitar 63 %.
3.5 Getaran Bebas dari sebuah sistem SDOF dengan Coloumb Damping Struktur dengan redaman couloumb mempunyai persamaan gerakan diferensial linier sehingga menjadi lebih mudah diselesaikan untuk kasus respon getaran bebas ataupun respon akibat adanya gaya luar. Dalam praktek, redaman ini biasanya terjadi akibat hilangnya sambungan, gesekan antar komponen dan redaman dari material yang semuanya menyebabkan perilaku struktur menjadi nonlinier. Gambar 3.12 menunjukkan sebuah massa meluncur pada permukaan kasar yang menghasilkan gaya gesekan.
………(3.50)
………(3.51)
………(3.52)
………(3.53)
uGambar 3.9. Sistem SDOF dengan redaman.
mg N
fD k k
Dimana k adalah koefisien gesek kinetik atau koefisien gesekan luncur. Gaya gesek selalu berlawanan arah dengan gerakan gaya . Menggunakan hukum Newton II, kita peroleh:
u m f fs D
Sedangkan fs = k . u dan fD kmgsgn(u) Selanjutnya, 0 , 0 , u mg ku u m u mg ku u m k k Dengan 2 1 n k D D g k f u
Persamaan 3.58 dan 3.59 dapat digabungkan untuk mendapat:
0 0 2 2 u u u u u u u u D n n D n n
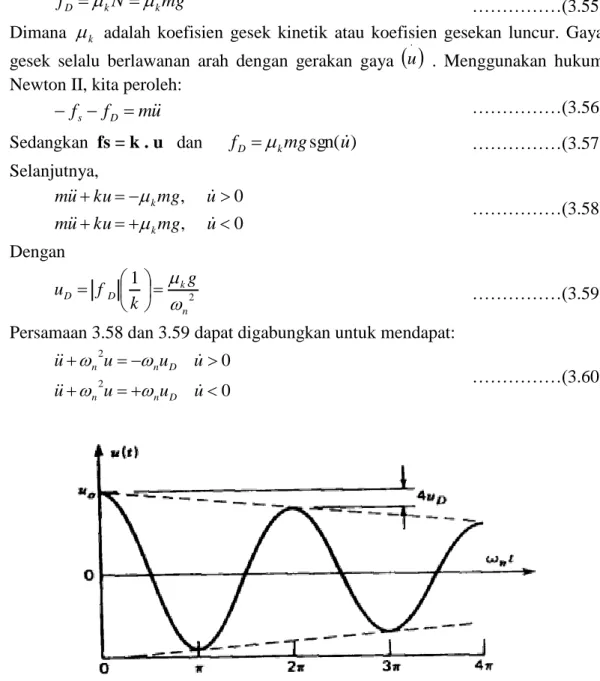
Gambar 3.10. Respon getaran bebas sistem dengan redaman Couloumb.
………(3.55) ………(3.56) ………(3.57) ………(3.58) ………(3.59) ………(3.60)
Gerakan yang dihasilkan kemudian diplot dalam gambar 3.10. Yang perlu dicatat pada gambar 3.10 adalah bahwa sistem redaman couloumb berlaku seperti sistem SDOF tak teredam yang posisi seimbangnya berubah pada tiap akhir dari setengah putaran. Tampilan yang beda dari gambar 3.9 adalah amplitudo berkurang secara linier terhadap waktu, tidak secara eksponen seperti pada kasus redaman viskous.
2 1 n k m
BAB IV RESPON SISTEM SDOF TERHADAP GERAK
HARMONIS
Pada bab ini, dibahas respon sistem SDOF baik yang tidak teredam maupun dengan redaman viskous terhadap gaya luar, dalam bentuk gerakan harmonis, yaitu struktur yang dibebani oleh gaya atau perpindahan yang besarnya dinyatakan oleh fungsi sinus atau cosinus dari waktu (p(t) = sin Ωt atau p(t) = cos Ωt). Contoh gerakan harmonis adalah gerakan mesin-mesin rotasi yang menghasilkan pengaruh harmonis akibat adanya eksentrisitas massa yang berotasi.
4.1 Respon Sistem SDOF Tak Teredam Terhadap Gerakan Harmonis Respon total dari sistem linier terdiri dari superposisi respon akibat gerakan gaya luar dan respon dari gerakan natural. Sedangkan pada gerakan harmonis, gaya luarnya berupa respon steady-state.
Berdasarkan gambar 4.1 yang menunjukkan Sistem SDOF tak teredam, diasumsikan bahwa sistem linier, amplitudo p0 dan frekuensi gerakan Ω, persamaan gerakan adalah:
t p
ku u
m 0cos
Nilai dari gaya luar (respon steady-state) berbentuk:
t U
up cos
Untuk menentukan amplitudo, U, persamaan (4.2) disubstitusikan ke dalam persamaan (4.1): 2 0 m k p U
Terlihat bahwa km2 0, maka defleksi statis:
k p
U 0
0
Kombinasi dari persamaan 4.3 dan 4.4 menghasilkan persamaan fungsi respon frekuensi: 2 0 1 k m k p U 2 0 1 k m U U 1 r , 1 1 ) ( 2 r H ………(4.1) ………(4.2) ………(4.3) ………(4.4) ………(4.5)
dimana: 2 n r dan 0 ) ( U U H r = rasio rekuensi
H(Ω) = fungsi respon frekuensi
Gambar 4.1. Gerak harmonis dari sistem SDOF tak teredam.
Fungsi respon frekuensi adalah fungsi yang memberikan penambahan atau pembesaran pada gerakan steady-state dalam bentuk nilai absolut dari fungsi respon frekuensi. Faktor pembesaran respon steady-state dirumuskan sebagai berikut:
) (
H Ds
Dari gabungan persamaan (4.2) dn (4.5) memberikan persamaan respon steady-state sebagai berikut:
1 r , cos 1 2 0 t r U up
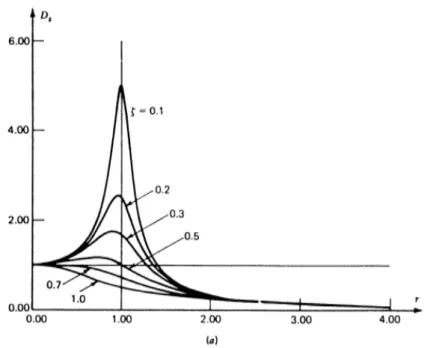
Gambar 4.2. Faktor pembesaran untuk sistem SDOF tak teredam (p(t) = po sin Ωt).
………(4.6)
………(4.7)
………(4.8)
Jika r < 1, maka responnya sefase / terdapat di dalam fase gerakan karena (1-r2) bernilai positif.
Jika r > 1, maka responnya 180° diluar fase / tidak sefase dengan gerakan, sehingga up dapat ditulis:
t
r U up cos 1 2 0Persamaan respon total terdri dari solusi komplementer (uc) yang memenuhi persamaan homogen dan solusi partikulir (up) yang memenuhi persamaan differensial nonhomogen. c p u u u t A t A uc 1cosn 2sinn t A t A t r U
u cos cosn sinn
1 2 1 2 0
Persamaan 4.9 dan 4.11 tidak dapat digunakan bila r = 1 atau Ω = nyang disebut dengan keadaan resonansi.
Dari gambar 4.2 terlihat bahwa frekuensi gerakan yang berada dekat dengan resonansi, responnya menjadi sangat besar karena amplitudonya bernilai tak hingga. Oleh karena itu, memperhitungkan respon struktur terhadap gerakan harmonis sangat penting untuk menghindari kondisi resonansi dimana terjadi nilai amplitudo yang sangat besar. Namun biasanya bahan yang dipakai untuk struktur mempunyai limit kekuatan dan pada kondisi sebenarnya struktur akan runtuh jauh sebelum dicapainya amplitudo maksimum.
Contoh 4.1
Sistem pada gambar 4.1 mempunyai k = 40 lb/in, dan berat benda 38,6 lb. Jika uo uo 0dan gaya luar P(t) = 10 cos (10t), tentukan persamaan gerakannya dan sketsa hasil pergerakannya.
………(4.10)
Solusi:
Dari persamaan 4.11, respon total adalah:
t A t A t r U
u cos cosn sinn
1 2 1 2 0
Selanjutnya, persamaan gerakan diturunkan untuk mendapatkan persamaan kecepatan: t A t A t r U
u sin nsinn ncosn
1 2 1 2 0 Persamaan 3.4a rad/s 20 ) 6 . 38 ( ) 386 ( 40 2 1 2 1 W kg m k n Persamaan 4.4: in. 25 . 0 40 10 0 0 k p U Persamaan 4.7: 5 . 0 20 10 n r Sehingga, in 33 . 0 25 . 0 1 25 . 0 ) 5 . 0 ( 1 25 . 0 1 2 2 0 r U
Gunakan kondisi awal untuk menghitung A1 dan A2. 1 2 0 1 0 ) 0 ( A r U u Maka: in 33 . 0 1 2 0 1 r U A n A u(0)0 2 Jadi, A2 = 0 u = 0,33[cos (10t) – cos (20t)] in
Persamaan yang diperoleh kemudian digambarkan pada kurva di bawah ini.
Dari respon yang digambarkan pada contoh 4.1, maka:
Respon steady-state mempunyai frekuensi yang sama dengan gerakan dan berada di dalam fase gerakan karena r < 1.
Gerakan gaya dan gerakan natural saling memperkuat dan menghilangkan, menghasilkan fenomena tumbukan. Jadi, respon total bukan merupakan gerak harmonis sederhana.
Respon total maksimum (u = -0,66 in pada t = π/10 s) lebih besar pada pembesarannya daripada respon steady-state (up = 0,33 in pada t = 0).
Total faktor pembesaran dinamis didefinisikan sebagai:
0 ) ( max U t u D t
Jika r = 1, maka asumsi yang digunakan pada persamaan (4.2) adalah :
n p Ct t
u sin ,
Kemudian, dengan mnsubstitusikan persamaan (4.13) ke persamaan (4.1), didapat: n m p C 2 0 Atau: t t U up 21( 0n )sinn
4.2 Respon Sistem SDOF Redaman Viskous Terhadap Gerakan Harmonis Model analisis klasik dari sistem SDOF adalah model pegas-massa-dashpot (gambar 3.1). Ketika sistem tersebut dikenakan gerakan harmonis (p0 cos Ωt), maka persamaan gerakannya menjadi:
t p ku u c u m 0cos ………(4.12) ………(4.13) ………(4.14) ………(4.15) ………(4.16)
Gambar 4.3. Respon up(t) saat resonansi, Ω=n.
Akibat adanya redaman pada persamaan (4.16), respon steady-state tidak akan berada dalam satu fase dengan respon steady-state:
) cos(
U t
up
Dimana U adalah amplitudo state dan α adalah sudut fase respon steady-state. Penentuan nilai U dan α dapat dilakukan dngan menggunakan putaran vektor. Kecepatan dan percepatan dirumuskan sebagai berikut:
) sin( U t up ) cos( 2 U t up
Vektor posisi dari gaya luar, perpindahan, kecepatan dan percepatan terlihat pada gambar 4.4.
Gambar 4.4. Vektor gaya, perpindahan, kecepatan dan percepatan.
Gambar 4.5. Poligon vektor gaya.
………(4.17)
Persamaan 4.17 dan 4.18 disubstitusikan ke persamaan 4.16, menghasilkan persamaan:
t
c U
t
kU
t
p tU
m
2 cos sin cos 0cos
Persamaan di atas diperoleh dari poligon vektor gaya dimana masing-masing variabel gaya menggambarkan gaya yang bekerja pada suatu massa. Gambar 4.5 menunjukkan kasus m2U< kU yang berarti < n. Proyeksi
vektor dengan garis putus-putus pada gambar tersebut ditulis pada bagian kiri persamaan 4.19. Sedangkan proyeksi vektor dengan garis penuh ditulis pada bagian kanan persamaan 4.19. Dari gambar 4.5 juga bias diperoleh hubungan persamaan sebagai berikut:
2 2 2 2 0 (kU m U) (c U) p 2 tan m k c
Sehingga nilai faktor pembesaran steady-state dirumuskan dengan persamaan:
2 2 2
21 0 1 2 1 r r U U Ds 2 1 ζ 2 α tan r r Kombinasi dari amplitude dan fase disebut respon frekuensi. Hubungan antara rasio frekuensi dan faktor pembesaran steady-state digambarkan pada kurva gambar 4.6.
Gambar 4.6. Kurva faktor pembesaran vs rasio frekuensi untuk berbagai nilai redaman.
(4.19)
…………(4.20a) …………(4.20b)
…………(4.21a)
Contoh 4.2
Jika = 0,2 ditambahkan pada sistem contoh 4.1, dengan kondisi dan perlakuan yang sama, tentukan persamaan gerakannya. Sketsa pergerakannya.
Solusi:
Fungsi total respon didapat dari:
) sin cos ( ) cos( t e A1 t A2 t U u d d t n Dimana:
2 1 2 2 2 0 ) 2 ( ) 1 ( r r U U n , ud dan r dapat ditemukan dari contoh 4.1 rad/s 20 2 1 m k n in 25 . 0 40 10 0 0 k p U 5 . 0 20 10 n r rad/s 4 ) 20 )( 2 . 0 ( n Oleh karenanya:
0.32 in ) 5 . 0 )( 2 . 0 ( 2 5 . 0 1 25 . 0 2 1 2 2 2 U 267 . 0 ) 5 . 0 ( 1 ) 5 )( 2 . 0 ( 2 1 2 tan 2 2 r r α = 0,26 radDari persamaan 3.31a, rad/s 6 . 19 ) 2 . 0 ( 1 20 1 2 2 d n
Hasil diferensial total respon dari waktu:
A A t A A t
e t
U
u sin( ) nt d n cosd d n sind 2 1 1 2 Maka, 1 ) 26 . 0 cos( 32 . 0 0 ) 0 ( A u Sehingga: in 31 . 0 ) 26 . 0 cos( 32 . 0 1 A in 11 . 0 2 A Oleh karenanya, in )] 6 . 19 sin( 11 . 0 ) 6 . 19 cos( 31 . 0 [ ) 26 . 0 10 cos( 32 . 0 t e 4 t t u t
BAB V Respon Sistem SDOF Terhadap Bentuk Spesial Dari
Eksitasi
Pada berbagai situasi riil di lapangan, eksitasi dinamik yang terjadi tidaklah harmonik maupun periodik. Oleh karena itu, pada bab ini akan dibahas respon dinamik dari suatu sistem SDOF terhadap eksitasi.
5.1 Respon Dari Sebuah Viscous-Damped System SDOF Untuk Sebuah Step Input yang Ideal
Prototipe sistem SDOF yang ditunjukkan dalam gambar 3.1 merupakan bentuk subjek untuk sebuah step input yang ideal seperti ditunjukkan pada gambar 5.1. Dari gambar di bawah dapat dilihat bahwa sebuah gaya bekerja secara tiba-tiba dari gaya nol (0) sampai dengan Po, selanjutnya nilainya konstan sebesar po.
P(t)
Po
t Gambar 5.1. Sebuah stop input yang ideal.
Persamaan dari gerakan diberikan oleh persamaan 3.1, yaitu: 0 , 0 cu ku p t u m
Dianggap sistem berhenti pada t = 0 (kondisi awal), sehingga: 0 ) 0 ( ) 0 ( u u
Penyelesaian dari persamaan 5.1 memuat sebuah bagian penyelesaian (a
particular solution) dari persamaan 5.1, yang dapat ditulis menjadi: 0
k p up
Dan sebuah penyelesaian pelengkap (a complementary solution) diberikan (untuk
<1) oleh persamaan 3.32 sehingga:
) sin cos ( ) ( 0 1 2 t A t A e k p t u nt d d
Gunakan kondisi awal untuk evaluasi A1 dan A2, kita peroleh:
t t e k p t u d d n d t n sin cos 1 ) ( 0 ………(5.1) ………(5.2) ………(5.3) ………(5.4) ………(5.5)
Suatu cara yang berguna untuk menentukan respon dinamis suatu sistem adalah dengan memperhitungkan rasio respon atau suatu faktor beban dinamik,R(t), yang didefinisikan oleh:
max ) ( ) ( p t ku t R
Suatu faktor beban dinamik adalah rasio dari respon dinamis terhadap deformasi statis. Untuk step input ideal, R(t)diberikan oleh:
t t e t R d d n d t n sin cos 1 ) (
Suatu faktor beban dinamik yang sejenis diilustrasikan pada gambar 5.2. Pada rasio respon plot R(t)1 sesuai dengan posisi dari perpindahan statis. Karena beban diberikan secara langsung, terdapat overshoot, kemudian sistem akan tetap bertahan pada nilai statis yaitu 1 setelah melalui sejumlah gerakan bolak-balik yang teredam.
Gambar 5.2. Plot dari faktor beban dinamik untuk sebuah step input.
Untuk sebuah sistem tak teredam (undamped), persamaan 5.5 menjadi:
) cos 1 ( ) ( 0 t k p t u n dan Rmax 2
5.2 Persamaan Respon dari sebuah Sistem Undamped SDOF pada Rectangular Pulse dan Pembebanan Ram
Pada bagian rectangular pulse akan dibahas efek dari hilangnya beban setelah durasi td. Gambar 5.3 menunjukkan sebuah input rectangular pulse dan rasio respon untuk sebuah sistem tak teredam untuk 2 kasus, yaitu
2 ) ( , 2 ) ( n d n d T t b T t a
dimana td adalah durasi dari rectangular pulse.
………(5.6)
………(5.7)
Gambar 5.3. Respon dari sebuah input rectangular pulse, (a) rectangular pulse dan
(b) rasio reaksi.
Dari gambar di atas terlihat bahwa ketika ketika td Tn 2, maka respon maksimum terjadi sepanjang Force-vibration era, sedangkan jika td Tn 2, maka respon maksimum terjadi di Residual-vibration era, dimana nilai maksimumnya dapat ditentukan pada tiap kasusnya.
a. Kasus 1 : Forced-vibration era (0 t td)
Gambar 5.3 (b) memperlihatkan R(t) untuk sebuah pulse dengan durasi pembebanan sebesar td 5 4Tn, dimana R(max) terjadi selama
force-vibration era. Untuk kasus ini, R(t) adalah sama untuk sebuah step ideal
yang nilainya diperoleh dari persamaan (5.5) untuk sistem undamped, dimana:
d
nt t t
t
R1( )1cos , 0 Nilai maksimumnya adalah
2 2 ) ( 1 max 1 R Tn R
b. Kasus 2 : Residual-vibration era (td < t)
Gambar 5.3(b) menunjukkan R(t) untuk sebuah pulse selama durasi 8
n d T
t . Rmaks terjadi selama residual-vibration era. Karena respon untuk t > td adalah vibrasi bebas dengan kondisi awal “initial condition”
) ( 1 td R
dan R1(td), maka persamaan (3.17) dapat digunakan dalam bentuk ) ( sin ) ( ) ( cos ) ( ) ( 1 1 2 n d n d d n d t t t R t t t R t R
untuk t td, dimana R1(td) dan R1(td)diperoleh dari persamaan 5.9.
………(5.9)
………(5.11) ………(5.10)
Gambar 5.4. Rotasi vektor yang merepresentasikan vibrasi bebas tak teredam.
Dari gambar 5.4 dapat dilihat bahwa amplitude U, dan sudut pada persamaan 3.21 ditentukan dengan
2 2 2 n o o u u U dan o n o u u tan
Persamaan amplitude U tersebut dapat digunakan untuk menentukan
amplitude dan respon ini.
2 1 2 1 2 1 max 2 ) ( ) ( n d d t R t R R Persamaan di atas dapat ditulis sebagai berikut: n d T t R ) 2sin ( 2 max
Untuk memperhitungkan pengaruh dari durasi pembebanan pada respon maksimum, maka selanjutnya akan dibahas mengenai pengaruh dari peningkatan waktu pembebanan. Gambar 5.4 memperlihatkan hubungan antara beban ramp dengan peningkatan waktu tr yang diterapkan pada
sistem undamped SDOF.
………(5.12)
P(t)
Po
tr t
Gambar 5.5. Fungsi input ramp.
Persamaan gerakan pada kondisi awal adalah
(5.14b) ... ... ... (5.14a) ... ... ... 0 t t P t t P t t ku u m r o r o r
0 u 0 0 u untuk 0 ≤ t ≤ tr, solusi khususnya adalah
k p t t u r p 0 Kemudian, t A t A k p t t u n n r sin cos 2 1 0
Dengan menggunakan kondisi awal dari persamaan 5.15, kita dapatkan
t t t t k p u n r n r sin 1 0
Untuk ttr, persamaan 5.14b dapat diselesaikan menjadi
t t t t k p u n r n r n sin sin 1 1 0Gambar 5.6a memperlihatkan respon sebuah masukan dengan tr Tnserta
n r T
t . Gambar 5.6b menggambarkan pengaruh dari kenaikan waktu pada respon maksimum. ………(5.15) ………(5.16) ………(5.17) ………(5.18) ………(5.19)
(a)
(b)
Gambar 5.6. Respon dari sistem SDOF tak teredam terhadap input ramp. (a) Respon terhadap
input ramp. (b) Respon maksimum terhadap input ramp.
Dari gambar 5.6, dapat dilihat bahwa respon maksimum, Rmax 2, terjadi pada step input ideal (misalkan untuk tr = 0). Untuk ramp dengan tr >> Tn akan terjadi sedikit overshoot dan sistem mengalami sedikit getaran bolak-balik atas kurva defleksi statis semu (pseudostatic deflection curve).
r r ic pseudostat t t k p t t u 0 , 0
5.3 Respon Dari Sistem SDOF Tak Teredam untuk Impuls dengan Durasi Pendek, Unit Respon Impuls
Pembebanan impuls adalah pembebanan yang berlangsung dalam selang waktu yang singkat. Impuls pada pembebanan ini didefinisikan sebagai perkalian dari gaya dan selang waktu bekerjanya gaya tersebut. Mengingat sistem SDOF tak teredam menyebabkan gaya dari durasi td << Tn menghasilkan sebuah impuls