Fakultas Ilmu Komputer
Universitas Brawijaya 4622
Sistem Deteksi Api pada Quadcopter Ar Drone Menggunakan Metode Color Filtering HSV dan YCbCr Color Space
Anata Tumonglo1, Gembong Edhi Setyawan 2, Rizal Maulana3
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Peristiwa kebakaran merupakan bencana yang terjadi oleh karena adanya perluasan titik sumber api yang menjalar ke benda berpotensi terbakar. Selain itu, peristiwa tersebut juga sering disebabkan oleh kelalaian manusia yang tidak bertanggung jawab. Oleh sebab itu dilakukan manajemen pengendalian resiko dalam mengantisipasi maupun meminimalizir dampak kerugian yang terjadi. Salah satunya yakni dengan penggunaan quadcopter untuk memonitoring dan melakukan pendeteksian objek. Penelitian ini dirancang untuk mendeteksi objek titik api dalam suatu ruangan melalui pengolahan citra dengan menggunakan kamera depan ArDrone terhadap pengiriman frame data image raw pada UDP port 5555.
Pengolahan citra diimplementasikan pada platform ROS yang digunakan untuk menghubungkan quadcopter dengan GCS menggunakan OpenCv. Sistem ini memanfaatkan metode Color Filtering Hue Saturation Value (HSV) dan YCbCr Color Space. Hasil penelitian ini berupa sebuah sistem pada ArDrone yang mampu mendeteksi objek titik api. Uji coba pada sistem dilakukan dengan melakukan pengujian pendeteksian dengan jarak yang berbeda-beda dengan acuan posisi objek titik api, pengujian rentangan parameter nilai HSV beserta nilai YCbCr pada setiap kondisi, pengujian dengan kecepatan tertentu dengan acuan posisi objek titik api dan pengujian kinerja respons sistem. Hasil yang didapat yaitu jarak yang efektif pendeteksian adalah jarak 8 meter dengan persentase keseluruhan sebesar 83,33%, kecepatan maksimun quadcopter ArDrone yang sesuai jika dilakukan pendeteksian adalah dengan kecepatan 1m/s dan kinerja respons sistem dalam keadaan statis untuk mendeteksi objek titik api sebesar 0,022 detik.
Kata kunci: kebakaran, quadcopter, pengolahan citra, color filtering hsv, ycbcr color space Abstract
Fire events are disasters that occur because of the expansion of the source of the fire that propagates to potentially burned objects. In addition, these events are also often caused by irresponsible human negligence. Therefore risk management is carried out in anticipation of minimizing the impact of losses. One of them is by using a quadcopter to monitor and detect objects. This study was designed to detect hotspot objects in a room through image processing using the ArDrone front camera for sending raw frame data images at UDP port 5555. Image processing is implemented on the ROS platform which is used to connect quadcopter with GCS using OpenCv. This system utilizes the Hue Saturation Value (HSV) Color Filtering and YCbCr Color Space methods. The results of this study are in the form of a system on ArDrone that is capable of detecting hotspot objects. Testing on the system is done by doing detection tests with different distances with reference to the position of the hotspot object, testing the range of HSV value parameters along with YCbCr values in each condition, testing with a certain speed by reference to the position of hotspot objects and testing the system response performance. The results obtained are effective detection distance is 8 meters with an overall percentage of 83.33%, the speed of the appropriate ArDrone quadcopter if detected is with a speed of 1m/s and the system response performance to detect hotspot objects by 0.022 seconds.
Keywords: fire, quadcopter, image processing, color filtering hsv, ycbcr color space
1. PENDAHULUAN
Perisitiwa kebakaran merupakan bencana yang terjadi oleh karena adanya perluasan titik sumber api menjalar ke benda berpotensi terbakar. Selain itu, peristiwa tersebut juga
sering disebabkan oleh kelalaian manusia yang tidak bertanggung jawab. Terjadinya peristiwa kebakaran sering menimbulkan berbagai akibat yang tidak diinginkan baik yang menyangkut kerugian material, kegiatan usaha, kerusakan
lingkungan, maupun menimbulkan ancaman terhadap keselamatan jiwa manusia (Ramli, 2010). Oleh karena peristiwa tersebut maka dibutuhkan suatu tindakan preventif ataupun upaya pencegahan dalam mengurangi bahkan menghilangkan kemungkinan dampak yang terjadi. Salah satunya hal yang dapat dilakukan yakni manajemen risiko, karena sangat penting bagi kelangsungan suatu usaha atau kegiatan jika terjadi suatu bencana seperti kebakaran (Kuntoro, 2017).
Upaya dalam manajemen pengendalian resiko terjadinya peristiwa kebakaran dapat dibagi dalam berbagai bentuk seperti mengurangi potensi pemantik api, pengendalian bahan mudah terbakar, dan identifikasi cepat mengenai terjadinya kebakaran (ILO, 2018).
Penggunaan sistem pada saat ini, dalam melakukan penanganan kebakaran sebagai bentuk pengendalian resiko pada ruang lingkup gedung berupa penggunaan sistem pendeteksian terhadapa suhu, flame dan asap. Ketiga bentuk sistem tersebut dapat mendeteksi dengan cara mendeteksi adanya perubahan suhu, mendeteksi timbulnya warna api dalam ruangan dan mendeteksi timbulnya asap di sekitar dalam ruangan. Di lain hal juga terdapat penggunaan teknologi drone (UAV) sebagai bentuk manajemen resiko akan tetapi pengembangannya masih sangat minim di Indonesia dalam hal pendeteksian objek.
Kemampuan jangkauan operasi yang diperluas, manuvernya yang cepat, serta peningkatan keselamatan personel, maka kendaraan udara tak berawak (UAV) dengan sistem vision-based memiliki potensi besar untuk memantau, mendeteksi, dan memerangi kebakaran (Yuan, 2015). Pada penelitian sebelumnya, secara otomatis dapat mendeteksi kebakaran hutan melalui gambar inframerah (IR). Dalam proses operasi metode penghitung blob dan morphological image processing, api akhirnya dapat dilacak di setiap gambar IR. Akan tetapi dalam penelitian ini harga kamera yang digunakan cukup mahal dan daerah panas bukan api dengan gerakan juga diekstrak (Yuan, 2017).
Pada penelitian sebelumnya, melakukan pengembangan perangkat sistem quadcopter cerdas yang dapat mendeteksi dan mencari api melalui menggunakan sensor api. Penelusuran api pada penelitian ini menggunakan metode pencarian grid akan tetapi dalam penelitian ini sensor api yang digunakan hanya dapat digunakan pada jarak dekat sehingga dapat merusak sistem jika terkena dengan objek titik
api (Rishang, 2016).
Agar quadcopter dapat digunakan untuk mendeteksi objek titik api maka akan digunakan metode color filtering HSV dan YCbCr Color Space. Color filtering merupakan salah satu metode image processing yang digunakan dalam mengolah ataupun memproses data citra berdasarkan komposisi warna yang tekah disesuaikan dengan pengguna. Warna yang digunakan dalam penelitian ini adalah HSV (Hue, Saturation and Value) dan YCbCr.
Pemilihan penggunaan ruang warna HSV memiliki keunggulan oleh karena ruang warna HSV lebih efisien daripada RGB dalam memperkirakan daerah api. Pemilihan ruang warna HSV bukan RGB oleh karena pada ruang warna RGB sulit untuk men-filter nyala warna, dimana channels sangat berkorelasi satu sama lain (Lee, et al., 2017). Sedangkan dalam pemilihan penggunaan ruangan warna YCbCr memiliki keunggulan tersendiri berupa menampilkan kinerja terbaik dalam mendeteksi api dibandingkan dengan RGB karena dapat memisahkan chrominance dari luminance lebih efektif daripada ruang warna RGB (Zaidi, et al., 2015).
Pada penelitian ini akan diimplementasikan metode Color Filtering HSV dan YCbCr Color Space dengan menggunakan opencv sebagai unit pengolahan citra pada quadcopter berjenis Ar Drone. Data citra video diperoleh melalui pengiriman data frame dari kamera internal ArDrone yang ditransmisikan melalui protocol UDP port 5555. Pengolahan citra diimplementasikan pada platform ROS yang digunakan untuk menghubungkan quadcopter dengan GCS menggunakan OpenCv. Data gambar akan diproses di dalam personal computer melalui pengolahan citra. Akuisi awal gambar akan diolah terlebih dahulu dengan melakukan blur untuk meningkatkan kualitas hasil deteksi yang kemudian akan dikonversi ke dalam bentuk HSV dan YCbCr untuk melakukan color filtering. Setelah itu akan melakukan opening dan closing untuk menghilangkan noise serta menghaluskan kontur. Terakhir, langkah selanjutnya dilakukan contour detection untuk menampilkan output hasil deteksi di GCS.
2. PERANCANGAN DAN IMPLEMENTASI 2.1 Gambaran Umum Sistem
Gambar 1. Diagram blok sistem
Diagram blok sistem memaparkan secara menyeluruh sistem mulai dari input sistem, proses dari sistem dan output dari sistem. Pada gambar 1, Operatyng system Linux Ubuntu merupakan sistem operasi yang digunakan dalam pemrosesan atau unit pengolahan dari sistem dalam memproses input berupa data video citra dari kamera ArDrone. Melalui fitur kamera dari quadcopter ArDrone akan melakukan akuisisi data frame video streaming dari lingkungan ArDrone dimana data tersebut dikirim dari quadcopter ArDrone menuju komputer melalui protokol IEEE 802.11n/ wifi.
Pada ruang lingkup pengolahan sistem, terdapat sistem operasi ROS yang dipergunakan sebagai sistem operasi yang nantinya akan menghubungkan komputer dengan quadcopter melalui jaringan Wi-fi. Selain itu, terdapat juga driver Ardrone Autonomy yang digunakan sebagai library untuk mengambil nilai linear dan angular yang selanjutnya dipakai dalam pergerakan quadcopter. Ditambah lagi, terdapat library OpenCV untuk mengolah citra input yang diberikan. Setelah input berhasil diolah maka langkah selanjutnya akan menghasilkan output berupa pergerakan dari quadcopter dan menampilkan hasil proses deteksi pada ground control system.
2.1 Perancangan Komunikasi Sistem
Dalam perancangan komunikasi sistem, keseluruhan dari alur koneksi dipaparkan seperti pada gambar 2. Hal pertama yang harus dilakukan yakni berupa dengan melakukan konfigurasi sistem di komputer dengan mengatur beberapa beberapa parameter quadcopter AR Drone pada ground control system. Setelah konfigurasi dilakukan, maka proses selanjutnya yakni berupa melakukan koneksi antara komputer dengan quadcopter melalui protokol IEEE 802.11/wifi pada UDP port 5556.
Dalam hal ini komputer yang bertindak
sebagai client mengirim AT Commands untuk konfigurasi koneksi dengan quadcopter ArDrone yang bertindak sebagai server.
Kemudian ketika antara quadcopter ArDrone dan komputer sudah terhubung satu sama lain maka komputer bisa menerima informasi navdata dari quadcopter AR Drone seperti data status posisi, kecepatan, percepatan dan kecepatan putaran motor melalui UDP port 5554. Data navdata tersebut dapat dilihat oleh user melalui ground control station.
Gambar 2. Perancangan komunikasi sistem
Langkah selanjutnya yakni melakukan perintah take-off secara manual melalui user dengan melakukan input di keyboard komputer dan dalam saat yang bersamaan pengiriman frame video melalui streaming video pada UDP port 5555 dilakukan. Setelah itu, quadcopter akan melakukan take-off dan akan mencari objek titik api dalam ruangan. Ketika objek titik api berhasil dideteksi dan dikenali oleh quadcopter AR Drone, maka langkah selanjutnya yakni quadcopter akan menampilkan frame video output hasil proses deteksi pada ground control system.
2.2 Perancangan Ground Control System dan Pergerakan Quadcopter
Dalam perancangan ground control system dan pergerakan quadcopter, pengguna akan mengendalikan menggunakan cara melalui pergerakan secara manual menggunakan keyboard pada gcs.. Pertama-tama akan dilakukan perancangan ground control system sebagai unit pengendali quadcopter dalam menjalankan misi tertentu. Misi tertentu yang dilakukan berupa berbagai pergerakan dari quadcopter ArDrone untuk mencari titik api.
Bagian dari Ground Control System terdiri dari 3 fungsi diantaranya fungsi utama, fungsi pergerakan dan fungsi deteksi api.
Gambar 3. Perancangan ground control system
Dalam fungsi utama memuat inisialisasi node yang merupakan source inti untuk menjalankan sistem dan memuat subscriber yang diperuntukkan dalam hal akuisisi data dari quadcopter ArDrone. Selain itu juga, fungsi utama digunakan untuk memanggil fungsi- fungsi lain. Dalam fungsi pergerakan memuat inisialisasi kecepatan linear dan angular dari quadcopter. Variabel dari nilai linear dan angular disimpan di dalam nilai x, y dan z. Data yang diperlukan dalam pergerakan quadcopter diambil dari driver ArDrone Autonomy.
Sedangkan yang terakhir adalah fungsi deteksi api, dimana memuat perancangan pengolahan citra dari sistem untuk mendeteksi objek titik api
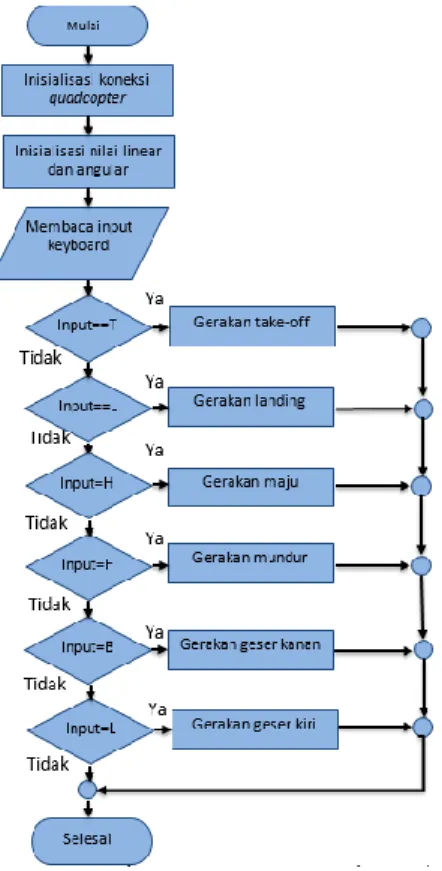
Gambar 4. Diagram alir pergerakan quadcopter
Setelah merancang sistem utama, langkah selanjutnya merupakan perancangan pergerakan quadcopter seperti yang terlihat pada gambar 4.
Dalam pergerakan quadcopter, pengguna akan mengendalikan pergerakan melalui input tombol-tombol pada keyboard di ground control sytem. Pertama kali melakukan inisialisasi
koneksi ground control station dengan quadcopter. Setelah itu melakukan inisialisasi nilai linear dan angular pada sumbu x, sumbu y dan sumbu z. Untuk alur pergerakan ini ditunjukkan pada gambar 4.
2.3 Perancangan Deteksi Objek Titik Api .
Sebelum melakukan perancangan area deteksi dari output hasil deteksi langkah pertama yang dilakukan yakni membagi tampilan frame kamera depan ArDrone. Dalam hal tersebut frame tampilan kamera depan dari quadcopter dengan ukuran 640x360 pixel dibagi menjadi 9 kotak frame kecil dengan mempunyai ukuran masing-masing sama. Perancangan dari pembagian frame dilakukan karena berdasarkan pengujian serta eksperimen yang telah dilakukan terhadap sudut pandang kamera depan ArDrone diperoleh hasil pendeteksian secara maksimal dan lebih efektif. Untuk area pendeteksian bisa digambarkan seperti gambar 4.
Gambar 5. Perancangan area deteksi
Perancangan dari pembagian frame tampilan kamera depan quadcopter dilakukan berdasarkan pengujian dan analisis sehingga nantinya akan mempermudah dalam proses pendeteksian objek yang berada di depan kamera quadcopter ArDrone. Pembagian frame dilakukan menggunakan persamaan 1 dan 2.
Pembagian sumbu x = sumbu x / 3 (1) Pembagian sumbu x = sumbu y / 3 (2)
Dari persamaan 1, diketahui pembagian terhadap sumbu vertikal x yang dimana akan dibagi menjadi 3 bagian sehingga masing- masing dari range ukuran kotak frame kecil berukuran 0 -213.33 pixel. Sedangkan dari persamaan 2 sumbu horizontal y juga dilakukan pembagian yang dimana akan dibagi 3 bagian
sumbu x = 640
sumbu y = 360
sehingga masing-masing dari range ukuran kotak frame kecil berukuran 0 - 120 pixel. Untuk melakukan pembagian frame kecil tersebut maka akan menggunakan fungsi yang terdapat pada OpenCV.
Gambar 6. Diagram alir deteksi objek api
Seperti yang dipapakan pada gambar 5 dalam bagian alur perancangan proses deteksi dari kamera maka hal pertama yang dilakukan yakni melakukan akuisisi data frame video dari kamera depan quadcopter untuk selanjutnya dilakukan pemrosesan citra. Kemudian data frame citra video quadcopter dalam bentuk tipe ruangan warna BGR dikonversi ke RGB untuk dilakukan dukungan pemrosesan citra. Setelah itu, pada urutan kondisi proses pertama yakni pada ruangan warna RGB akan dilakukan konversi ke ruangan warna YCbCr yang mempunyai rentangan nilai sesuai untuk mendeteksi objek titik api, kemudian menghilangkan noise dengan melakukan blurring, setelah itu melakukan erotion, dilation dan morphologhical, serta melakukan contour detection. Sedangkan pada urutan kondisi proses kedua yakni pada ruangan warna RGB akan dilakukan konversi ke ruangan warna HSV yang
mempunyai rentangan nilai sesuai untuk mendeteksi objek titik api, kemudian menghilangkan noise dengan melakukan blurring, setelah itu melakukan erotion, dilation dan morphologhical, serta melakukan contour detection. Dari kedua proses yang telah dilakukan sebelumnya akan dilakukan proses combine dan masking untuk dilakukan penggabungan sehingga mendapatkan hasil deteksi objek lebih optimal. Setela itu, ketika objek titip api berhasil dideteksi maka langkah selanjutnya akan melakukan proses Enclosing circle dengan dilengkapi radius dalam gambar untuk menandakan atau menunjukkan objek titik api. Akan tetapi terdapat kondisi ketika objek belum berhasil dideteksi oleh sistem maka akan kembali ke kondisi akuisisi awal dari data citra.
Gambar 7. Diagram alir akuisisi nilai HSV dan YCbCr
Dalam melakukan pengambilan data nilai HSV beserta nilai YCbCr, pertama kali yang harus dilakukan yakni berupa inisialisasi koneksi dengan kamera depan dari quadcopter.
Kemudian melakukan pembacaan titik tengah koordinat serta mengambil nilai dari setiap masing-masing komponen nilai red, green dan blue. Setelah itu, melakukan proses konversi nilai, baik itu konversi dari nilai rgb ke nilai hsv maupun konversi dari nilai rgb ke nilai ycbcr.
3. PENGUJIAN DAN HASIL
Untuk menyimpulkan performa dari sistem in, maka akan dilakukan 5 jenis pengujian yaitu pengujian ketepatan deteksi api terhadap jarak, pengujian terhadap nilai HSV dan nilai YCbCr, pengujian ketepatan deteksi dengan beragam kecepatan dan pengujian kinerja respons sistem.
3.1 Pengujian Ketepatan Deteksi Api terhadap jarak
Pengujian ini dimaksudkan untuk memperoleh seberapa jauh jarak quadcopter agar bisa mendeteksi objek titik api dalam berbagai jarak yang telah ditentukan.
Gambar 8. Pengujian ketepatan pada jarak 2 m Pada gambar 7 menunjukkan pengujian ketepatan deteksi api pada jarak 2 m dan ketinggian 1,5 meter. Dari beberapa jarak yang diuji didapatkan total keseluruhan hasil ketepatan deteksi sebesar 83,33%. dikarenakan semakin jauh jarak dari objek titik api terhadap kamera depan quadcopter didapatkan hasil bahwa kontur pixel dari titik api semakin kecil sehingga semakin sulit untuk terdeteksi. Hasil analisis pada jarak lainnya dapat dilihar pada tabel 1, 2, 3 ,4, 5 dan tabel 6.
Tabel 1. Hasil pengujian ketepatan deteksi terhadap jarak
Posisi Frame Jarak dalam meter
2m 4m 6m 8m 9m 10m Kiri atas 100% 100% 100% 100% 100% 0%
Tengah atas 100% 100% 100% 100% 100% 0%
Kanan atas 100% 100% 100% 100% 100% 0%
Kiri tengah 100% 100% 100% 100% 100% 0%
Pusat 100% 100% 100% 100% 100% 0%
Kanan tengah 100% 100% 100% 100% 100% 0%
Kiri bawah 100% 100% 100% 100% 100% 0%
Tengah bawah 100% 100% 100% 100% 100% 0%
Kanan bawah 100% 100% 100% 100% 100% 0%
Pengujian dengan rentang jarak yang berbeda-beda didapatkan hasil seperti pada
Tabel 1, bahwa semakin jauh jarak dari titik objek api maka nilai untuk deteksi juga semakin kecil. Hasil dari pengujian ini didapatkan rata- rata persentase keberhasilam pada jarak 2 meter sebesar 100%, jarak 4 meter sebesar 100%, jarak 6 meter sebesar 100%, jarak 8 meter sebesar 100%, jarak 9 meter sebesar 100% dan jarak 10 meter sebesar 0%. Sehingga untuk total persentase keberhasilan deteksi pada sistem ini sebesar 83,33%.
3.2 Pengujian terhadap nilai HSV dan nilai YCbCr
Pengujian ini dimaksudkan yakni untuk mendapatkan serta memperoleh parameter nilai minimun serta parameter nilai maksimun dari masing-masing ruang warna, baik itu ruang warna HSV maupun ruang warna YCbCr dalam mendeteksi objek titik api pada kondisi waktu dan lingkungan yabg berbeda. Kondisi berupa pagi hari, siang hari dan sore hari. Dalam melakukan pengujian ini, maka akanmenggunakan kamera dari quadcopter tanpa menerbangkan quadcopter. Dengan beberapa pengujian secara acak, data nilai HSV dan nilai YCbCr sampai objek titik api dapat terdeteksi oleh quadcopter.
Tabel 2. Hasil pengujian nilai HSV kondisi pagi hari
No Nilai Hue Nilai Saturation Nilai Value MIN MAX MIN MAX MIN MAX
1 0 55 0 135 246 255
Tabel 3. Hasil pengujian nilai YCbCr kondisi pagi hari
No Nilai Y Nilai CB Nilai Cr
MIN MAX MIN MAX MIN MAX
1 210 246 132 159 91 201
Tabel 4. Hasil pengujian nilai HSV kondisi siang hari
No Nilai Hue Nilai Saturation Nilai Value MIN MAX MIN MAX MIN MAX
1 0 94 0 30 255 255
Tabel 5. Hasil pengujian nilai YCbCr kondisi siang hari
No Nilai Y Nilai CB Nilai Cr
MIN MAX MIN MAX MIN MAX
1 225 255 155 218 0 176
Tabel 6. Hasil pengujian nilai HSV kondisi sore hari
No Nilai Hue Nilai Saturation Nilai Value MIN MAX MIN MAX MIN MAX
1 0 49 2 105 250 255
Tabel 7. Hasil pengujian nilai YCbCr kondisi sore hari
No Nilai Y Nilai CB Nilai Cr
MIN MAX MIN MAX MIN MAX
1 210 246 132 159 91 201
Berdasarkan hasil pengujian yang dilakukan sebanyak 10 kali dengan nilai HSV dan YCbCr yang berbeda-beda seperti yang terlihat pada tabel 2, tabel 3, tabel 4, tabel 5, tabel 6 dan tabel 7. Didapatkan hasil bahwa nilai yang bisa mendeteksi dengan akurat pada ruangan warna HSV kondisi pagi hari yaitu parameter Hue minimal = 0 dan maksimal = 55 , parameter Saturation minimal = 0 dan maksimal = 135, dan parameter Value minimal = 246 dan maksimal = 255. Sedangkan nilai yang bisa mendeteksi dengan akurat pada ruangan warna YCbCr yaitu parameter Y(Luminance) minimal = 210 dan maksimal = 246 , parameter Cb(Chrominance) minimal = 132 dan nilai maksimal = 159, dan parameter Cr(Chrominance) minimal = 91 dan nilai maksimal = 201. Pada kondisi siang hari yaitu parameter Hue minimal = 0 dan maksimal
= 94 , parameter Saturation minimal = 0 dan maksimal = 30, dan parameter Value minimal = 255 dan maksimal = 255. Sedangkan nilai yang bisa mendeteksi dengan akurat pada ruangan warna YCbCr yaitu parameter Y(Luminance) minimal = 225 dan maksimal = 255 , parameter Cb(Chrominance) minimal = 155 dan nilai maksimal = 218, dan parameter Cr(Chrominance) minimal = 0 dan nilai maksimal = 176. Dan terakhir sore hari, yaitu parameter Hue minimal = 0 dan maksimal = 49 , parameter Saturation minimal = 2 dan maksimal
= 105, dan parameter Value minimal = 250 dan maksimal = 255. Sedangkan nilai yang bisa mendeteksi dengan akurat pada ruangan warna YCbCr yaitu parameter Y(Luminance) minimal =
210 dan maksimal = 246 , parameter Cb(Chrominance) minimal = 132 dan nilai maksimal = 159, dan parameter Cr(Chrominance) minimal = 91 dan nilai maksimal = 201.
3.3 Pengujian Ketepatan Deteksi Api dengan beragam Kecepatan
Pengujian ini dimaksudkan untuk memperoleh tingkat keakuratan dalam mendeteksi objek api dalam berbagai kecepatan yang berbeda-beda.
Tabel 4. Hasil pengujian ketepatan deteksi api dengan beragam kecepatan
Posisi Frame Kecepatan (m/s)
0,3 0,6 0,9 1
Gerak maju 100% 100% 100% 100%
Geser kiri 100% 100% 100% 100%
Geser kanan 100% 100% 100% 100%
Gerak atas 100% 100% 100% 100%
Gerak bawah 100% 100% 100% 100%
Pada Tabel 4 menunjukkan hasil pengujian terhadap kecepatan didapatkan rata-rata persentase total keberhasilan pada kecepatan 0,3 m/s sebesar 100 %, rata-rata persentase total keberhasilan pada kecepatan 0,6 m/s sebesar 100
%, rata-rata persentase total keberhasilan pada kecepatan 0,9 m/s sebesar 100 % dan rata-rata persentase total keberhasilan pada kecepatan 1 m/s sebesar 100 %. Sehingga untuk total keberhasilan dari total keseluruhan sebesar 100%. Pada pengujian kecepatan tidak berpengaruh terhadap pada ketepatan deteksi objek titik api. Untuk kecepatan rendah maupun kecepatan maksimal mendapatkan nilai ketepatan deteksi yang sama dengan hasil ketepatan deteksi yang maksimal.
3.4 Pengujian Respons Sistem
Pengujian ini dimaksudkan untuk memperoleh ataupun mengetahui seberapa baik performa dari sistem deteksi api yang telah dirancang dengan melihat waktu yang dibutuhkan oleh sistem dari awal hingga dapat mendeteksi objek titik api. Untuk mengetahui selisih waktu tersebut maka dilakukan dengan menggunakan dua cara yang berbeda yakni komputasi program pada saat keadaan dinamis maupun komputasi program pada saat keadaan statis. Pemerolehan waktu selisih komputasi program pada saat keadaan dinamis dilakukan pada saat kondisi drone terbang sedangkan pemerolehan waktu selisih komputasi program pada saat keadaan statis dilakukan pada saat kondisi drone diam pada tempatnya. Pagi setiap
pengujian, akan menghasilkan output berupa selisih waktu dari waktu akhir dikurangi waktu awal.
(a)Waktu awal kondisi statis (b)Waktu akhir kondisi statis
(c)Waktu awal kondisi dinamis (d)Waktu akhir kondisi statis gerakan pitch gerakan pitch
(e)Waktu awal kondisi dinamis (f)Waktu akhir kondisi statis gerakan roll gerakan roll
(g)Waktu awal kondisi dinamis (h)Waktu akhir kondisi statis gerakan yaw gerakan yaw
Gambar 9. Pengujian kinerja respons sistem
Pada gambar 9 menunjukkan hasil pengujian kinerja respons sistem pada kondisi yang berbeda-beda. Pada pengujian waktu kinerja respons sitem kondisi statis didapatkan waktu awal dan waktu akhir seperti pada Gambar 9 (a) dan Gambar 9 (b).
Pada pengujian waktu kinerja respons sistem kondisi dinamis gerakan pitch didapatkan waktu awal dan waktu akhir seperti pada Gambar 9 (b).
dan Gambar 9 (c).
Pada pengujian waktu kinerja respons sistem kondisi dinamis gerakan roll didapatkan waktu awal dan waktu akhir seperti pada Gambar 9 (e) dan Gambar 9 (f).
Pada pengujian waktu kinerja respons sistem kondisi dinamis gerakan yaw didapatkan waktu
awal dan waktu akhir seperti pada Gambar 9 (g) dan Gambar 9 (h).
Tabel 5. Hasil pengujian tehadap waktu kinerja respons sistem
No. Uji
Nilai Waktu kinerja (detik) Statis Dinamis
(pitch)
Dinamis (roll)
Dinamis (yaw)
1 0,018 0,034 0,033 0,058
2 0,023 0,035 0,046 0,019
3 0,018 0,035 0,032 0,016
4 0,029 0,017 0,082 0,021
5 0,018 0,022 0,020 0,031
6 0,026 0,030 0,018 0,046
7 0,022 0,043 0,029 0,039
8 0,020 0,033 0,033 0,043
9 0,020 0,023 0,018 0,039
10 0,030 0,020 0,031 0,028
Rata-rata 0,022 0,029 0,033 0,034
Setelah melakukan pengujian terhadap waktu kinerja respons sistem pada setiap kondisi sebanyak 10 kali, didapat hasil kinerja respons sistem seperti pada Tabel 5. Besar dari repsons sistem ini diperoleh dari menghitung selisih waktu melalui perhitungan waktu akhir (t2) yang didapat dari saat quadcopter mampu mendeteksi api dikurangi waktu awal (t1) yang didapat dari pada saat pengambilan data frame video melalui inisialisasi penggunaan kamera depan. Hasil dari pengujian kinerja respons sistem pada keadaan statis didapatkan waktu rata-rata dari keseluruhan percobaan yang telah dilakukan sebesar 0,022 detik. Hasil dari pengujian kinerja respons sistem pada keadaan dinamis gerakan pitch didapatkan waktu rata-rata dari keseluruhan percobaan yang telah dilakukan sebesar 0,029 detik. Hasil dari pengujian kinerja respons sistem pada keadaan dinamis gerakan roll didapatkan waktu rata-rata dari keseluruhan percobaan yang telah dilakukan sebesar 0,033 detik. Hasil dari pengujian kinerja respons sistem pada keadaan dinamis gerakan yaw didapatkan waktu rata-rata dari keseluruhan percobaan yang telah dilakukan sebesar 0,034 detik. Hasil rata-rata dari beberapa waktu kinerja tersebut menunjukkan bahwa performa dari sistem sangat cepat dan responsif.
4. KESIMPULAN
Berdasarkan beberapa analisis dari hasil yang telah dilakukan pada penelitian ini, dapat dirangkum bahwa sistem deteksi api pada quadcopter ArDrone menggunakan metode color filtering hsv dan ycbcr color spaces secara keseluruhan dapat berjalan dengan fungsionalitasnya. Komponen kamera internal
Ar Drone dapat mengakuisisi dan mengirimkan data frame video ke gcs. Akurasi sistem secara keseluruhan memiliki nilai rata-rata sebesar 83,33% berdasarkan akurasi terhadap jarak.
sedangkan waktu kinerja respons sistem mendapatkan nilai sebesar 0,022 detik. Untuk akurasi sistem dan kinerja sistem dapat dikatakan cepat dan sangat responsif
Untuk saran dalam penelitian selanjutnya diharapkan dapat mengembangkan sistem ini menjadi lebih baik lagi, misalnya dengan penambahan komunikasi dengan raspberry pi untuk memungkinkan dilakukannya task tambahan seperti sistem robot terbang yang dapat memadamkan api serta menggunakan metode lain dalam segmentasi objek.
5. DAFTAR PUSTAKA
International Labour Office, 2018. Manajemen Risiko Kebakaran. [pdf] International Labour Organization. Tersedia di:
<https://ilo.org/wcmsp5/groups/public/- --asia/---ro-bangkok/---ilo/documents /publication/wcms_616190.pdf>
[Diakses 1 Maret 2019]
Kuntoro, C. (2017). Implementasi Manajemen Risiko Kebakaran Berdasarkan (IS) ISO 31000. HIGEIA (Journal of Public Health Research and Development), 1(4), 109-119.
Lee, D., Lee, S.H., Byun, T., & Cho, N.I. 2017.
Fire Detection using Color and Motion Models. IEIE Transactions on Smart Processing & Computing. 6. 237-245.
Putri, A.S., 2018. Sistem Deteksi Warna pada Quadcopter Ar.Drone Menggunakan Metode Color Filtering Hue Saturation and Value (HSV) .S1.Universitas Brawijaya.
Rishang, A. (2016). Perancangan Sistem Deteksi Api Dengan Quadcopter Ar Drone Menggunakan Metode Pencarian Grid.
Sarjana thesis, Universitas Brawijaya.
Ramli, Soehatman, 2010. Petunjuk Praktis Manajemen Kebakaran (Fire Management). Jakarta: Dian Rakyat.
Yuan, Chi & Zhang, Youmin & Liu, Zhixiang., 2015. A Survey on Technologies for Automatic Forest Fire Monitoring, Detection and Fighting Using UAVs and Remote Sensing Techniques. In Canadian Journal of Forest Research 2015. 45.
Yuan, C., Liu, Z. and Z, Youmin., 2017. Fire
detection using infrared images for UAV-based forest fire surveillance. In 2017 International Conference on Unmanned Aircraft Systems (ICUAS) 2017, pp 567-572, 2017.
Zain, A.B., 2018. Sistem Ar Drone Pengikut Garis Menggunakan Algoritma Progressive Probabilistic Hough Transform. S1. Universitas Brawijaya.
Zaidi, N.I.B., Lokman, N.A.A.B, Daud, M.A., M.S., Chia, K.A., 2015. Fire recognition using RGB and YCbCr color space.
10(1). pp. 9786-9790.