BAB II
METODE ELEMEN HINGGA PADA STRUKTUR
2.1 Jenis - Jenis Struktur pada Bangunan Teknik Sipil
Struktur 1D (satu dimensi) adalah suatu idealisasi dari bentuk struktur yang sebenarnya dimana struktur dianggap merupakan gabungan dari elemen 1D (elemen rangka, balok, grid, dan portal) untuk kemudian dilakukan analisis perhitungan.
Pada dasarnya perilaku semua tipe struktur 1D, 2D, atau 3D (rangka/balok/portal, pelat/cangkang atau solid) dapat dijabarkan dalam bentuk persamaan diferensial. Dalam praktiknya, penulisan persamaan diferensial untuk struktur 1D sering kali tidak perlu karena struktur tersebut dapat diperlakukan sebagai penggabungan elemen 1D. Solusi eksak untuk persamaan diferensial dapat dinyatakan dalam bentuk relasi antara gaya dan peralihan pada ujung-ujung elemen.
Kombinasi yang tepat dari relasi ini dengan persamaan keseimbangan dan kompatibilitas pada simpul dan perletakan menghasilkan sebuah sistem persamaan aljabar yang menggambarkan perilaku struktur.
2.1.1 Truss (rangka)
Definisi truss (rangka) adalah konstruksi yang tersusun dari batang-batang tarik dan batang-batang tekan saja, umumnya dari baja, kayu, atau paduan ringan guna
mendukung atap atau jembatan, umumnya hanya memperhitungkan pengaruh aksial saja.
Truss 2 dimensi : truss yang dapat menahan beban pada arah datar saja (sumbu x, y) umumnya beban yang bekerja adalah beban terpusat nodal.
Truss 3 dimensi : truss yang dapat menahan beban pada semua arah (sumbu x, y dan z) umumnya beban yang bekerja adalah beban terpusat nodal.
2.1.2 Balok
Definisi balok yaitu konstruksi yang tersusun dari batang-batang saling menyilang dan menyatu pada bidang horizontal dimana gaya-gaya dominan yang bekerja adalah tegak lurus bidang tersebut sehingga menimbulkan momen lentur yang menghasilkan putaran sudut pada ujung-ujung batang, dan translasi tegak lurus pada bidang batang tersebut.
2.1.3 Grid
Definisi grid yaitu balok-balok yang saling menyilang dan menyatu pada bidang horizontal dimana gaya-gaya dominan yang bekerja adalah tegak lurus bidang tersebut sehingga menimbulkan momen lentur, momen torsi, dan translasi tegak lurus pada bidang balok-balok tersebut, umumnya dapat menahan gaya normal terhadap bidang datarnya.
2.1.4 Frame (portal)
Definisi frame (portal) adalah kerangka yang terdiri dari dua atau lebih bagian konstruksi yang disambungkan guna stabilitas, umumnya dapat menahan gaya momen, gaya geser dan aksial.
Frame 2 dimensi : frame yang dapat menahan beban pada arah datar saja (sumbu x, y) umumnya beban yang bekerja adalah beban terpusat nodal dan beban batang.
Frame 3 dimensi : frame yang dapat menahan beban pada semua arah saja (sumbu x, y dan z) umumnya beban yang bekerja adalah beban terpusat nodal dan beban batang.
2.2 Konsep Elemen Hingga
Struktur dalam istilah teknik sipil adalah rangkaian elemen-elemen yang sejenis maupun yang tidak sejenis. Elemen adalah susunan materi yang mempunyai bentuk relatif teratur. Elemen ini akan mempunyai sifat-sifat tertentu yang tergantung kepada bentuk fisik dan materi penyusunnya. Bentuk fisik dan materi penyusun elemen tersebut akan menggambarkan totalitas dari elemen tersebut.
Totalitas sifat elemen inilah yang disebut dengan kekakuan elemen. Jika diperinci maka sebuah struktur mempunyai Modulus Elastis (E), Modulus Geser (G), Luas Penampang (A), Panjang (L) dan Inersia (I). Inilah satu hal yang perlu dipahami didalam pemahaman elemen hingga nantinya, bahwa kekakuan adalah fungsi dari E,G,A,L,I.
Sebagaimana telah didefinisikan para pendahulu-pendahulu, bahwa energi itu adalah kekal dan jika aksi (energi) dilakukan terhadap suatu materi, maka materi akan melakukan suatu reaksi sebesar aksi tersebut. Reaksi dari pada materi ini akan disebut dengan gaya dalam. ”GAYA DALAM “ yang ada dalam struktur didefinisikan yaitu: Gaya Normal, Gaya Lintang, dan Gaya Momen yang akan
mempengaruhi bentuk fisik materi tersebut. Perubahan bentuk fisik materi ini disebut dengan peralihan (displacement). Metode elemen hingga adalah suatu metode pemaparan bagaimana perjalanan aksi hingga timbul reaksi dalam materi, atau metode untuk memperkirakan besar reaksi dan reaksi apa yang timbul dari materi tersebut.
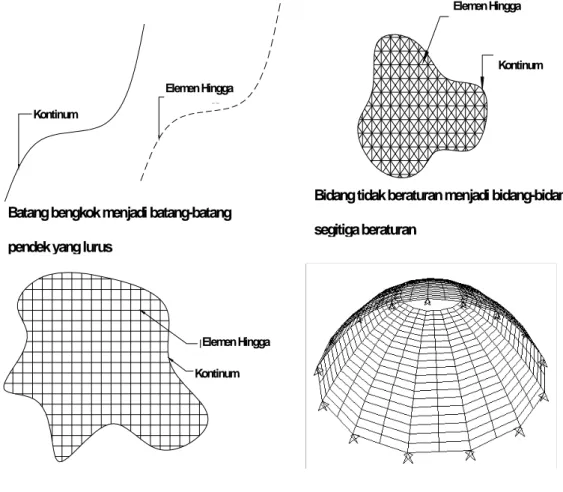
Kontinum dibagi-bagi menjadi beberapa bagian yang lebih kecil, maka elemen kecil ini disebut elemen hingga. Proses pembagian kontinum menjadi elemen hingga disebut proses “diskretisasi” (pembagian). Dinamakan elemen hingga karena ukuran elemen kecil ini berhingga (bukannya kecil tak berhingga) dan umumnya mempunyai bentuk geometri yang lebih sederhana dibanding dengan kontinumnya.
Dengan metode elemen hingga kita dapat mengubah suatu masalah dengan jumlah derajat kebebasan tertentu sehingga proses pemecahannya akan lebih sederhana. Misalnya suatu batang panjang yang bentuk fisiknya tidak lurus, dipotong-potong sependek mungkin sehingga terbentuk batang-batang pendek yang relatif lurus. Maka pada bentang yang panjang tadi disebut kontinum dan batang yang pendek disebut elemen hingga.
Suatu bidang yang luas dengan dimensi yang tidak teratur, dipotong-potong berbentuk segi tiga atau bentuk segi empat yang beraturan. Bidang yang dengan dimensi tidak beraturan tadi disebut kontinum, bidang segitiga atau segi empat beraturan disebut elemen hingga. Dan banyak lagi persoalan yang identik dengan hal diatas. Maka dari sini dapat dikatakan bahwa elemen hingga merupakan elemen diskrit dari suatu kontinum yang mana perilaku strukturnya masih dapat mewakili
Pendekatan dengan elemen hingga merupakan suatu analisis pendekatan yang berdasarkan asumsi peralihan atau asumsi tegangan, bahkan dapat juga berdasarkan kombinasi dari kedua asumsi tadi dalam setiap elemennya.
Bidang tidak beraturan menjadi bidang-bidang segiempat beraturan
Kontinum Elemen Hingga Batang bengkok menjadi batang-batang
pendek yang lurus Elemen Hingga Kontinum
Elemen Hingga
Kontinum tiga dimensi – parabolic dome
Gambar 2.1 Diskretisasi Suatu Koninum pada Metode Elemen Hingga
Karena pendekatan berdasarkan fungsi peralihan merupakan teknik yang sering sekali dipakai, maka langkah-langkah berikut ini dapat digunakan sebagai pedoman bila menggunakan pendekatan berdasarkan asumsi tersebut :
1. Bagilah kontinum menjadi sejumlah elemen (Sub-region) yang berhingga dengan geometri yang sederhana (segitiga, segiempat, dan lain sebagainya).
Bidang tidak beraturan menjadi bidang-bidang segitiga beraturan
um Kontin
Bidang tidak beraturan menjadi bidang-bidang segiempat beraturan
Batang bengkok menjadi batang-batang pendek yang lurus
Bidang tidak beraturan menjadi bidang-bidang segitiga beraturan
Elemen Hingga Kontinum
Kontinum Elemen Hingga
Kontinum
Kontinum – Parabolic Dome menjadi bidang-bidang segiempat kuadrilateral
Elemen Hingga
2. Titik-titik pada elemen yang diperlakukan sebagai titik nodal, dimana syarat keseimbangan dan kompatibilitas dipenuhi.
3. Asumsikan fungsi peralihan pada setiap elemen sedemikian rupa sehingga peralihan pada setiap titik sembarangan dipengaruhi oleh nilai-nilai titik nodalnya.
4. Pada setiap elemen khusus yang dipilih tadi harus dipenuhi persyaratan hubungan regangan peralihan dan hubungan rengangan-tegangannya.
5. Tentukan kekakuan dan beban titik nodal ekivalen untuk setiap elemen dengan menggunakan prinsip usaha atau energi.
6. Turunkan persamaan keseimbangan ini untuk mencari peralihan titik nodal.
7. Selesaikan persamaan keseimbangan ini untuk mencari peralihan titik nodal.
8. Hitung tegangan pada titik tertentu pada elemen tadi.
9. Tentukan reaksi perletakan pada titik nodal yang tertahan bila diperlukan.
2.3 Tegangan dan Regangan dalam Kontinum Elastis
Dalam pembahasan ini diasumsikan bahwa kontinum yang dianalisis terdiri atas material elastis dengan regangan kecil. Hubungan antara regangan dan tegangannya dapat digambarkan dalam suatu sistem koordinat ortogonal yang mengikuti kaidah tangan kanan misalnya dalam sebuah koordinat cartesius.
Gambar 2.2 memperlihatkan sebuah elemen yang amat kecil dalam sumbu koordinat Cartesius yang panjang sisi-sisinya dinyatakan dengan dx, dy, dan dz.
permuakaan elemen tadi. Tegangan normal diberi notasi x, y, dan z, sedangkan
tegangan geser diberi notasi τxy, τyz, dan seterusnya. Dari persamaan keseimbangan elemen tadi didapatkan hubungan sebagai berikut:
τxy x
τxz
τzy
z
τyx τyz
y
τzx
z,w
y,v
x,u dz
dx dy
Gambar 2.2 Tegangan pada sebuah elemen yang sangat kecil
τxy = τyx τyz = τzy τzx = τxz ... (2-1)
Tegangan – regangan yang dilukiskan dalam gambar akan menimbulkan regangan normal dan regangan geser. Regangan normal εx, εy, dan εz didefinisikan sebagai:
εx =
εy = εz= ……….. (2-
2)
dimana u, v, dan w merupakan translasi dalam arah x, y, dan z. Regangan geser, γxy, γyz dan lain-lain dinyatakan dalam rumus berikut ini:
γxy =
+
= γyx ; γyz =+
= γzy ; γzx =+
= γxz.…… (2-3)
gangannya akan dituliskan dalam bentuk matriks kolom (atau vektor) seperti berikut:
σ =
Dari persamaan ini dapat dilihat bahwa hanya ada tiga regangan geser yang bebas. Untuk mempermudah, keenam tegangan bebas beserta keenam re
= ε = = ……… (2-4)
egangan untuk material isotropik diturunkan dari teori elastisitas seperti berikut ini:
εx = Hubungan tegangan – r
=
εx = = ……… (2-5)
εx = =
dimana :
G =
Dalam persamaan ini E = modulus elastisitas (modulus Young), G = modulus geser, dan v = rasio Poisson. Dalam bentuk matriks, hubungan yang terdapat pada persamaan dapat dituliskan sebagai:
ε = C σ………... (2-6)
dimana
C = ……… (2-7)
Matriks C merupakan operator yang menghubungkan vektor regangan ε dengan vektor tegangan σ. Dan dengan meng-invers persamaan (2-6) didapatkan hubungan tegangan – regangan seperti berikut ini:
σ = E ε……….. (2-8) dimana
E = C -1 = … (2-9)
Matriks E adalah operator yang menghubungkan vektor tegangan σ dengan vektor regangan ε.
2.4 Finite Element Method Berdasarkan Prinsip Usaha Virtual
Dalam pembahasan ini, persamaan-persamaan metode elemen hingga akan diturunkan dengan menggunakan prinsip usaha virtual. Sebuah elemen hingga tiga dimensi yang terletak pada salib sumbu cartesius dengan koordinat x, y, dan z.
Peralihan umum (general displacement) yang terjadi pada sembarang titik dalam elemen dinyatakan dengan vektor kolom u:
u = ……….………... (2-10)
dimana u, v, dan w berturut-turut merupakan translasi dalam arah x, y, dan z.
Gaya tubuh (body forces) yang bekerja pada elemen, gaya-gaya ini akan dimasukkan ke dalam vektor b, seperti berikut:
b = ………... (2-11)
Notasi bx, by, dan bz mewakili komponen-komponen gaya (persatuan voume, luas atau panjang) yang bekerja pada sembarang titik sesuai dengan arah x, y, dan z.
Peralihan titik nodal (nodal displacement) q yang diperhitungkan hanyalah berupa translasi dalam arah x, y, dan z. Bila nen = jumlah titik nodal elemen, maka:
dimana:
qi = = ………... (2-13)
Gaya titik nodal (nodal actions) p diambil dalam arah x, y, dan z:
p = {pi} (i = 1,2,...,nen)………... (2-14)
dimana:
pi = ……… (2-15)
Hubungan antara peralihan umum dan peralihan titik nodal dinyatakan oleh fungsi bentuk peralihan (displacement shape function) sebagai berikut:
u = f q………... (2-16)
Dalam persamaan ini notasi f adalah matriks segiempat yang menunjukkan bahwa u sepenuhnya tergantung pada q.
Hubungan regangan-peralihan diperoleh dengan menurunkan matriks peralihan umum. Proses ini ditunjukkan dalam pembentukan matriks d yang disebut operator diferensial linier dan dapat dinyatakan dalam bentuk perkalian matriks:
ε = d u………... (2-17)
Dalam persamaan ini operator d menyatakan hubungan antara vektor regangan ε dengan vektor peralihan umum (vektor u). Dengan substitusi persamaan (2-16) ke dalam (2-17) diperoleh:
(2-22)
ε= B q………. (2-18)
dimana:
B = d f………... (2-19)
Matriks B menunjukkan regangan yang terjadi pada sembarang titik dalam elemen akibat satu satuan peralihan titik nodal.
Dari persamaan (2-8) telah diperoleh hubungan tegangan – regangan dalam bentuk matriks sebagai berikut:
σ = E ε………... (2-20)
dimana E adalah matriks yang menghubungkan tegangan σ dan regangan ε. Dengan mensubstitusikan persamaan (2-18) ke dalam (2-20) diperoleh:
σ = E B q………. (2-21)
dimana perkalian E B menunjukkan tegangan pada sembarang titik bila terjadi satu satuan peralihan titik nodal.
Prinsip usaha virtual: Bila ada suatu struktur dalam keadaan seimbang,
dikerjakan suatu peralihan virtual yang kecil dalam batas-batas deformasi yang masih dapat diterima, maka usaha virtual dari beban luar tadi sama denan energi regangan virtual dari tegangan dalamnya. Bila prinsip di atas kita terapkan pada elemen hingga, akan diperoleh:
δUe = δWe………...
dimana δU adalah energi regangan virtual dari tegangan dalam dan δW merupakan usaha virtual beban luar yang bekerja pada elemen. Untuk memperoleh kedua nilai tersebut, diasumsikan adanya peralihan virtual kecil yang dinyatakan dalam vektor δq. Jadi,
δq = { δq }i (i = 1,2,...,nen)...………...….. (2-23)
Kemudian peralihan umum virtual akan menjadi:
δu = f δq……….... (2-24)
Dengan menggunakan hubungan regangan peralihan dalam persamaan (2-18), kita dapatkan:
δε = B δq……….……... (2-25)
Energi regangan virtual dalam δU dapat dituliskan sebagai berikut:
δUe = ……….…... (2-26)
Usaha virtual luar dari gaya titik nodal dan gaya tubuh menjadi:
δWe = ………... (2-27)
Dengan substitusi persamaan (2-26) dan (2-27) ke dalam persamaan (2-22) akan dihasilkan:
= ………... (2-28)
Kemudian substitusi persamaan (2-20) untuk mengganti σ, dan dengan menggunakan transpose dari persamaan (2-24) dan (2-25) akan diperoleh:
= ………... (2-29) Selanjutnya, substitusi persamaan (2-18) untuk nilai serta bagilah ruas kiri dan kanan dengan sehingga persamaan (2-29) akan menjadi :
= ………...….. (2-30) Persamaan (2-30) dapat dituliskan kembali menjadi:
K q = p + pb………..………..…… (2- 31)
dimana
K = ………... (2-32)
dan
pb = ………... (2-
33)
Matriks K dalam persamaan (2-32) adalah matriks kekakuan elemen, yaitu gaya yang terjadi pada titik nodal akibat adanya satu satuan peralihan titik nodal.
Sedangkan vektor pb pada persamaan (2-33) menunjukkan gaya nodal ekuivalen akiba
Tegangan dan regangan yang diturunkan di atas hanya bergantung pada peralihan titik nodal. Bila terjadi regangan awal
t bekerjanya gaya tubuh dalam vektor b.
0, maka regangan total dapat dituliskan sebagai berikut:
= 0 + C ………... (2-
34)
dimana C adalah matriks hubungan regangan – tegangan. Dari persamaan (2-9) telah kita dapatkan:
C = -1………...….... (2-35) Dengan menyelesaikan vektor tegangan pada persamaan (2-34) akan diperoleh:
= E( – 0)……….. (2-
6)
samaan ini digunakan untuk mengganti 3
Bila per dalam persamaan (2-28), maka
akhirnya rumus tersebut akan menghasilkan:
K q = p + pb + p0………...…..... (2-
dimana
p0 = 37)
……….….... (2-38)
ivalen akibat
erasi Matriks Kita dapat menganggap vektor p0 merupakan beban titik nodal eku
regangan awal, sama halnya dengan yang ditimbulkan oleh perubahan temperatur.
2.5 Fungsi Bentuk Dan Peralihan Umum Dalam Bentuk Op
geom q dengan vektor dari konstanta sembarang c sebagai berikut:
al sehingga:
i en (2-
1)
an g1 me mengasum
carilah konstanta c dalam persamaan (2-40):
c = h-1 q………... (2-42)
Substitusikan persamaan (2-42) ke da (2-39) untuk memperoleh:
u = g h- (2-43)
f = g h-1………... (2-44)
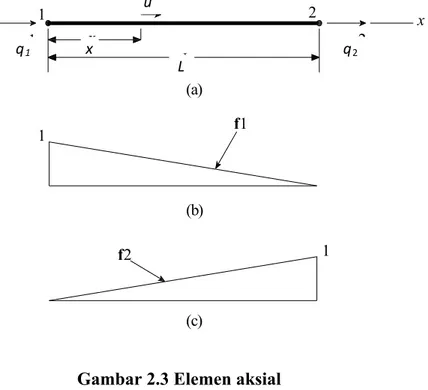
Sebagai contoh, untuk elemen aksial 1 dimensi asumsikan bahwa peralihan u di sembarang titik pada elemen merupakan fungsi linier dari x, seperti berikut ini:
u = c1 + c2 x (fungsi peralihan)……….… (2-45) Asumsikan bahwa fungsi peralihan dinyatakan sebagai perkalian antara matriks etri
u = g c………. (2-39)
Kemudian dicari operator g untuk setiap titik nod
q = h c……….……… (2-40)
Di mana, h = { g }(i = 1,2,...,n )………..
4
d nunjukkan matriks g yang dihitung pada titik nodal ke i. Dengan sikan bahwa matriks h adalah matriks bujur sangkar dan nonsingular,
lam
1 q...
L
x q2
q1
x
1 u 2
1 f1
f2 1
(a)
(b)
(c)
u = [1 x]
Gambar 2.3 Elemen aksial dalam bentuk matriks:
……….. (2-46)
dari persamaan (2-39) diperoleh:
fungsi bentuk peralihan dengan mencari edua kons nya, yaitu c1
adi c2 = (q konstanta in disubstitusikan ke dalam persamaan (2-23) akan diperoleh:
g = [1 x]... (2-47)
fungsi peralihan ini dapat dinyatakan dalam
k tanta dan c2.
Pada x = 0, didapat c1 = q1 ; untuk x = L akan diperoleh q2 = c1 + c2 L
J 2 – q1)/L. Bila i
q1 x q2
L
u = q1+ x………... (2-48)
Persamaan ini bukan lagi merupakan fungsi konstanta, melainkan fungsi dari
dapat dituliskan kembali menjadi:
u =
peralihan titik nodal. Bila persamaan (2-26) digabungkan dengan (2-16) maka akan
= f q……….……... (2-49) dimana fungsi bentuk yang didapat dalam bentuk matriks sebagai berikut:
f = [ f1 f2 ] =
Kedua fungsi bentuk peralihan ini diperlihatkan dalam Gambar 2.3 (b) dan (c).
Fungsi bentuk peralihan (shape function) bisa juga diperoleh dengan menghitung maan (2-40)]:
matriks g pada titik nodal 1 dan 2 [lihat persa
= ………..……... (2-50)
h = sehingga diperoleh:
= ……….. (2-51)
invers dari matriks h adalah:
h-1 = ……….…….... (2-52)
kemudian dari persamaan (2-44) diperoleh:
f = g h-1 = , yang sama dengan persamaan (2-49).
Hubungan regangan peralihan untuk elemen aksial hanya terdiri dari satu turunan saja sesuai persamaan (2-2) dalam sub-bab 2.3:
= d u =
ε = εx = = B maka: B =
q
= [-1 1]
gangan – regangan [persamaan (2-20) dan (2
σ = σx = E ε = E εx = EB q
Dengan cara yang sama, didapat hubungan te -21)] sebagai berikut:
Jadi: E = E dan E B = [-1 1]……… (2-53) Dengan mengasumsikan luas penampang A besarnya konstan, maka kekakuan elemen dapat dihitung dari persamaan (2-32) seperti berikut ini:
K = = [-1 1]
K = ... (2-54)
2.6 Grid Element
dan nodal tersebut Grid adalah sebuah struktur 1D yang terbentuk dari rangkaian balok-balok yang terhubung secara kaku pada nodal, dimana seluruh balok
berada pada bidang (X-Y) yang sama. Penggambaran ini identik dengan penggambaran portal bidang. Perbedaan antara struktur grid dan portal terletak pada arah beban yang bekerja pada struktur dan respons struktur terhadap beban tersebut.
Pada portal bidang seluruh beban bekerja pada bidang portal dan seluruh peralihan juga terjadi pada bidang tersebut. Balok-balok portal mengalami lentur dan deformasi aksial pada arah bidang. Pada struktur grid seluruh beban bekerja pada arah tegak lurus bidang, demikian juga dengan peralihan yang terjadi. Balok-balok grid mengalami lentur keluar bidang dan juga puntir.
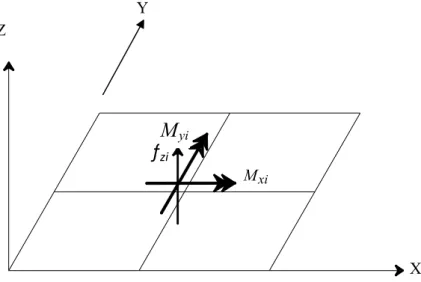
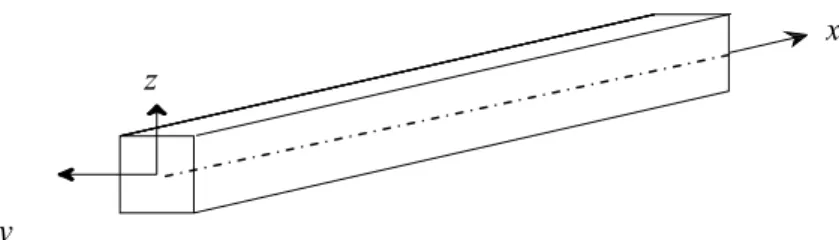
Sistem koordinat global yang akan dipakai untuk menempatkan struktur grid adalah pada bidang X-Y. Beban vertikal akan bekerja pada arah Z dan momen nodal bekerja pada bidang grid seperti tampak pada Gambar 2.4. Pada Gambar 2.5 memperlihatkan sistem koordinat lokal elemen yang digunakan.
Y Z
fzi Myi
Mxi
X
Gambar 2.4 Arah Positif Gaya Nodal Struktur dalam Sistem Global
Pada elemen grid, terdapat efek lentur terhadap sumbu horizontal penampang seperti halnya balok, dan juga efek puntir terhadap sumbu batang, yang berarti dapat
i, θxi, θyi ).
menahan momen torsi. Karenanya, pada setiap nodal terdapat: peralihan vertikal wi, rotasi terhadap sumbu horizontal penampang (arah y) akibat momen lentur, dan rotasi terhadap sumbu elemen akibat torsi. Tiap nodal mempunyai 3 derajat kebebasan (w
x z
y
Gambar 2.5 Sistem Koordinat Lokal Elemen 2.6.1 Efek Lentur
Efek lentur akan terjadi terhadap sumbu y elemen, dan efek puntir terjadi terhadap sumbu x elemen. Peralihan nodal dan gaya batang dianggap positif bila beker
lah rotasi, sedangkan w1 dan w2 adalah translasi pada
ja pada arah koordinat positif. Kita gunakan aturan tangan kanan unuk arah efek lentur dan torsi. Gambar 2.6 menunjukkan arah positif untuk gaya dan peralihan elemen. θx1, θy1, θx2, dan θy2 ada
arah z
z
fz1
y Mx1
x My2
My1
Mx2 fz2
y
Peralihan Elemen Positif
t a x-z. Dalam gambar ditentukan adanya sebuah peralihan umum w, yaitu translasi dalam arah z. Jadi:
n komponen tunggal bz (gaya per satuan panjang) yang bekerja dalam arah z.
b = b
[l at gambar 2.6 (a)]:
q1 : translasi dalam arah z dan rotasi kecil dalam arah y (mata panah tunggal)
an yang diberi nomor 3 tasi yang kecil. Maka, vektor peralihan titik nodal akan menjadi:
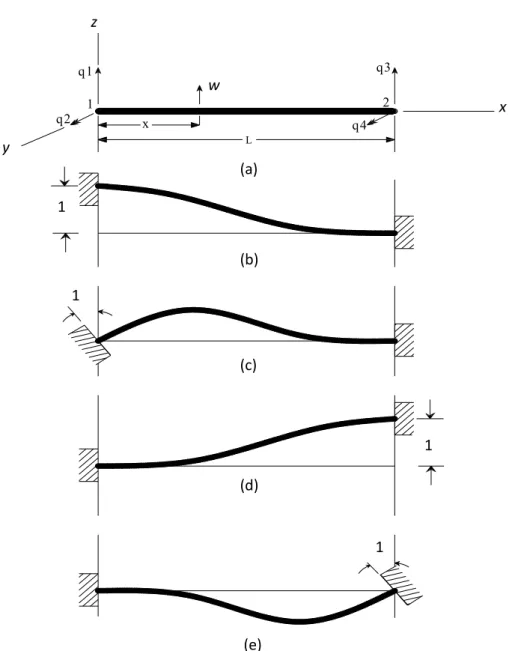
q = {q1, q2, q3, q4} = {w1, θy1, w2, θy2}………....
(2-54)
dimana:
Gambar 2.6 Gaya dan
Gambar 2.7 melukiskan elemen lentur (flexural element) lurus yang melendu pada bidang utam
u = w
Gaya tubuh yang ditinjau merupaka
Maka:
z
Pada titik nodal 1 ih
q2 : rotasi kecil dalam arah y ( mata panah ganda)
Hal yang sama juga berlaku untuk titik nodal 2 peralih dan 4 berturut-turut merupakan translasi dan ro
θy1 =
θ = y2
Turunan (putaran sudut) ini dapat dianggap sebagai suatu rotasi yang kecil walaupun sebenarnya mempengaruhi perubahan translasi pada titik nodal tersebut.
Aksi titik nodal yang terjadi pada titik nodal 1 dan 2 adalah:
p = {p1, p2, p3, p4} = {py1, M py2, Mx2}
py1 dan py2 : gaya dalam arah y pada titik nodal 1 dan 2
Mz1 dan Mz2 men dalam arah y pada titik nodal 1 dan 2
Karena ada empat peralihan titik nodal, fungsi peralihan lengkap untuk elemen lentur ini dapat diasumsikan sebagai berikut:
w = c1 + c2 x + c3 x2 + c4 x3……….…….
(2-55)
x1,
: mo
L
q2 x q1
v
q3 y
1
q4 2 x
z
w
x y z
(a) 1
(b) 1
(c)
1 (d)
1
Bentuk (Sumber : Weaver, William JR dan Paul R. Johnston, Elemen Hingga untuk Analisis Struktur, 1993)
matriks translasi g menjadi:
2 x ……… (2-56)
Peralihan kedua (rotasi) pada setiap titik nodal memiliki hubungan diferensial
terhadap x)adalah:
Gambar 2.7 Elemen Lentur dan Fungsi (e)
g = [ 1 x x 3 ]
dengan peralihan yang pertama (translasi). Matriks rotasi (turunan pertama g
= [0 1 2x 3x2]………
………..…… (2-57)
h dari kedua nodal 1 (x = 0) dan nodal 2 (x = L):
h = Bentuk matriks
= ……….………. (2-58)
invers dari matriks h adalah:
h-1 = ……….. (2-59)
Dari mengalikan kembali h dengan g akan diperoleh matriks fungsi bentuk peralihan dalam matriks f sebagai berikut:
-1
f = g h-1 = [ f1 f2 f3 f4 ]
f = [ 1 x x2 x3 ]
f = [ 2x3 – 3x2 L + L3 x3L – 2x2 L2 + xL3 - 2x3 + 3x2 L x3 L – x2 L2 ]…… (2-60)
f1 =
dimana fungsi bentuk yang didapat adalah:
(translasi pada titik 1 terhadap sumbu-z elemen: wz1)
f2 = (rotasi pada titik 1 terhadap sumbu-y elemen: θy1)
f3 = (translasi pada titik 2 terhadap sumbu-z elemen: wz2)
f4 = (rotasi pada titik 2 terhadap sumbu-y elemen: θy2)
satuan peralihan titik nodal dari eempat arah peralihan q1, q2, q3, dan q4.
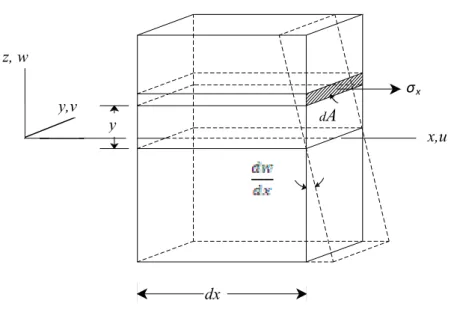
mengasumsikan bahwa penampang yang rata akan tetap rata selama deformasi seperti yang ditunjukkan dalam Gambar 2.8. Translasi u dalam arah x pada setiap titik dalam penampang adalah:
u = - y
Keempat fungsi bentuk ini dilukiskan dalam Gambar 2.6 (b), (c), (d), dan (e) yaitu perubahan w sepanjang elemen akibat dari satu
k
Hubungan regangan-peralihan dapat diturunkan untuk elemen lentur dengan
……… ………… . (2-61)
dengan menggunakan hubungan ini, kita dapat memperoleh persamaan regangan lentur:
εx =
… ..
= - y = - y ø………...……….. (2-62)
dengan ø adalah kelengkungan.
ø =
………...……….……... (2-63)Dari persamaan (2-62) dapat kita lihat bahwa operator diferensial linier d yang menghubungkan εx dengan w adalah:
= - y
d ………... (2-64)
z, w
σx
Gambar 2.8 Deformasi Lentur
Kemudian persamaan (2-19) akan memberikan matriks regangan-peralihan B seperti
(Sumber : Weaver, William JR dan Paul R. Johnston, Elemen Hingga untuk Analisis Struktur, 1993)
di bawah ini:
B = d f = [ 12x - 6L 6xL - 4L -12x + 6L 6xL - 2L ]2 2
x x
…… (2-65) Hubungan antara tegangan lentur σ dan regangan lentur ε dinyatakan dengan:
σ = E ε
x x
……….…..
(2-66) x, u
y,v y dA
x,u
dx
E B = E B……….…... (2-67)
en d t dipe seperti berikut ini:
K = Maka:
E = E dan
Kekakuan elem apa roleh dari persamaan (2-32) dan akan memberikan hasil
K = [ 12x - 6L 6xL - 4L2 -12x + 6L 6xL - 2L2 ]dA dx
Melalui perkalian dan integrasi (dengan EI konstan) maka akan dihasilkan persamaan (2-68).
rsi
Gambar 2.9 m m
tunggal θx, yaitu rotasi kecil dalam arah x. Jadi, u = [ θxi ]. Akibat adanya peralihan b = Mx berupa momen (persatuan panjang) yang bekerja dalam arah sumbu x positif.
Peralihan titik nodal terdiri dari rotasi aksial yang kecil pada titik nodal 1 dan 2.
2.6.2 Efek To
elukiskan sebuah elemen torsi yang dapat berupa tongkat pada esin atau batang pada struktur grid. Element ini juga memiliki peralihan umum
elastis ini (rotasi kecil tadi) akan dihasilkan gaya tubuh
Maka:
q = = ………..… (2-69)
L
x q2
q1
1 u 2 x
1
f2 1
f1 (a)
(b)
(c)
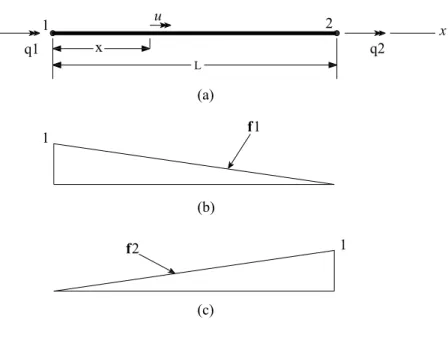
Gambar 2.9 Elemen Torsi dan Fungsi Bentuk
(Sumber : Weaver, William JR dan Paul R. Johnston, Elemen Hingga untuk Analisis Struktur, 1993)
Gaya titik nodal yang dihasilkan pada titik 1 dan 2 adalah:
p = =
Karena hanya ada dua peralihan titik nodal pada elemen torsi ini, maka dapat digunakan fungsi peralihan yang linier, yaitu:
θx = c1+ c2x……….
(2-70)
Fungsi bentuk peralihan pada elemen torsi ini sama seperti yang diperlihatkan dalam Gambar 2.9 (b) dan (c).
f = g h-1 = [ f1 f2 ] = ………... (2-
71)
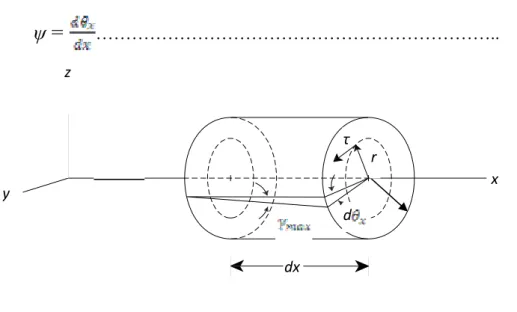
Kemudian turunkan hubungan regangan-peralihan untuk elemen torsi dengan penampang lingkaran seperti yang terlihat dalam Gambar 2.10. Asumsikan jari-jari penampang tetap lurus selama terjadi deformasi torsi. Disini dapat disimpulkan bahwa regangan geser γ akan bervariasi linier terhadap panjang jari-jari r seperti berikut:
γ = r = rψ……….……… (2-72)
dimana ψ adalah putaran (twist), yaitu besarnya perubahan dari putaran sudut. Jadi:
ψ = ……….. (2-73) z
τ
Gambar 2.10 Deformasi Torsi
(Sumber : Weaver, William JR dan Paul R. Johnston, Elemen Hingga untuk Analisis Struktur, 1993) r
y x
d
dx
K = dx
dimana: Ix = dA menya n be ya en ia am te ap netral.
K =
taka sarn mom iners pen pang rhad garis
K = ... ... ... (2-68)
Dari persamaan dapat dibuktikan bahwa nilai maksimum regangan geser terjadi pada permukaan.
γmax = Rψ
dimana R adalah jari-jari penampang (lihat gambar). Selanjutnya, pada persamaan jelas terlihat bahwa operator diferensial linier d yang menghubungkan γ dengan θx
adalah:
d = r ……….………... (2-74)
maka, matriks regangan-peralihan B akan menjadi:
B = d f = [-1 1]………... (2-75)
yang m ncul nilai r.
Pada elemen torsi, hubungan antara tegangan geser τ (Gambar 2.10) dengan regangan gesernya γ dinyatakan dengan:
τ = G γ……….... (2-76)
dimana simbol G menunjukkan modulus geser material.
Jadi: E = G dan E B = G B……….. (2-77)
Kekakuan torsi sekarang bisa diperoleh dengan menurunkan persamaan (2-32) sebagai berikut:
irip dengan matriks B pada elemen aksial, kecuali mu
K =
K = [-1 1] r dr dθ dx
K =
Dengan GJ konstan. Momen inersia polar J didefinisikan sebagai:
J = =
Untuk penampang bukan lingkaran/sembarang, momen inersia polar J diturunkan dari rumus:
+ = -2 G v’ , dimana: Ԅ = fun
Dengan bantuan penyelesaian m
J =
gsi torsi
emakai teori Prand’l (Bahan Kuliah Metode Elemen Hingga Prof.DR.Ing Johannes Tarigan, 2008), maka:
Khusus untuk tampang persegi maka Inersia Polar:
J = α a b 3,
dimana α dapat dilihat pada tabel 2.1.
si T ang ersegi Tabel 2.1 Koefisien Tor amp P
a/b α
1 0.141 1.5 0.196
2 0.229
2.5 0.249 b
3 0.263 4 0.281
5 0.291 a
6 0.299 Gambar 2.11 Tampang Persegi
8 0.307 10 0.312
~ 0.333
Jika nilai a/b ≥ 2, maka J dapat pula dihitung dengan rumus:
Dengan notasi matriks, p samaan-persam an daer a lam elem n yange mengalami lentur dan torsi pada grid element dapat ditulis sebagai persamaan keseimbangan elemen pada sistem koordinat lokal sebagai berikut:
Klokal =
Bila tidak ada beban nodal ekuivalen yang bekerja pada elemen grid, dan dengan
(2-31), maka:
p = K q
mengembalikan kembali bentuk persamaan keseimbangan elemen pada persamaan
=
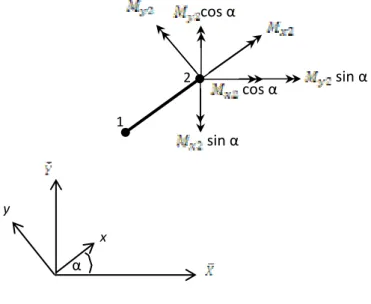
2.6.3 Transformasi pada sistem koordinat
nya men rangka dan portal, kita harus mentransformasikan matriks kekakuan elemen yang mengacu pada koordinat elemen ke dalam sistem
bu X dan Y (global) akan terletak pada bidang struktur dan karenanya berada pada bidang yang sama dengan sumbu x dan y (lokal) elemen.
lokal dan global paralel satu sama lain.
Pada Gambar 2.12, kita harus mentransformasi peralihan dengan memutar dalah s t ant sumbu x men dan sumbu
Seperti hal ele
koordinat global. Sum
Sumbu z
terhadap sumbu z. Bila α a udu ara ele global,
Sumbu (global) berimpit dengan sumbu z (lokal), maka translasi tegak lurus
bidang - maupun x-y adalah Wi = wi.
= 0
cos α
Gambar 2.12 Transformasi koordinat lokal ke koordinat global
Σ Mx = Mx2Cos α + My2 Sin α + 0 = 0
Σ My = Sin α + My2 Cos α + 0 sin α
x y
α
2 sin α
cos α 1
0 = 0 w
Σ Fz = + 0 + z2
{ } = =
Analog:
{ } = =
Pada titik simpul 1 berlaku juga seperti simpul 2, maka untuk satu elemen berlaku :
{ } = [ ] { } { } = = ………. (2-78) Untuk displacement vektor berlaku juga :
= [ ] ……… (2-79)
Analog :
= [ ]
{ } = = -1 { } = [ ]-1 dari persamaan (2-78) dan (2-79) :
[
‐1
] { } = [ ] ‐1 ………. (2-80)
{ } = [ ] [ ] = …………..……… (2-81)
dimana : = [ ] [ ] = [ ] [ ]………... (2-82)
Keterangan : [ ] = [ ] karena [ ] m
Matriks transformasi:
[
atriks Orthogonal.
] =
[ ] =
Matriks kekakuan elemen dalam sistem koordinat lokal adalah:
‐1
‐1 T
T
T
‐1
=
Jika: Sin α = S
Cos α = C, maka:
=[ ] [ ] T
=
=
Dengan menyelesaikan persamaan diatas, diperoleh matriks kekakuan elemen dalam sistem koordinat global:
=
... (2-83)
2.6.4 Kompatibilitas, Keseimbangan, Penentuan Dari Matriks Kekakuan.
Kondisi kompatibilitas mensyaratkan bahwa peralihan untuk semua titik pada suatu struktur yang terbebani harus kompatibel dengan seluruh peralihan pada struktur.
Dengan demikian, pada saat struktur dibagi-bagi menjadi elemen-elemen, kondisi kompatibilitas memerlukan beberapa persyaratan sebagai berikut:
Peralihan nodal yang merupakan pertemuan beberapa elemen haruslah kontinu dan pergerakannya selalu bersama.
Peralihan nodal struktur harus konsisten dengan perilaku nodal yang telah ditetapkan.
Peralihan nodal pada tumpuan harus memenuhi kondisi batas dari peralihan yang telah ditentukan sebelumnya.
Sebagai contoh, diketahui konstruksi seperti Gambar 2.13. Tujuannya adalah untuk mencari matriks kekakuan dari konstruksi tersebut.
Z
X Y
b a
1
MX2 3
MY2 2 FZ5
6
e c d
5
Y 4
Gambar 2.13 Penomoran untuk nodal dan batang
Elemen Simpul 1 (awal) Simpul 2 (akhir) Tabel 2.2 Penomoran untuk Nodal dan Batang
a 1 2
b 2 3
c 2 5
d 4 5
e 5 6
, , , sesuai dengan persamaan di atas
dengan = = = =
dengan = 0, untuk system Koordinat X – Y
berlaku : = = = ……..………... (2-84)
Untuk menjamin kompatibilitas dari perubahan bentuk maka harus ditetapkan :
=
+ + =
= =
+ + =
=
Untuk keseragaman maka perlu dibuat definisi arah positif dari gaya-gaya dalam.
= ………..………. (2-86) π
2
……….………. (2‐85)
Gambar 2.14 Freebody gaya-gaya dalam
{ } = { }
{ } = { } + { } + { } { } = { }
………..………. (2‐87) { } = { }
{ } = { } + { } + { } { } = { }
Dari persamaan f dan g didapat :
{ } = { } + { }
{ } = { } + { } + { } + { } + { } + { }
{ } = { } + { } { } = { } + { }
{ } = { } + { } + { } + { } + { } + { }
{ } = { } + { }
Persamaan (j) diatas jika disusun dalam bentuk matriks menjadi:
{ } = { }……….… (2-89)
dimana :
{ } = vektor dari gaya-gaya luar pada titik simpul
{ } = vektor dari perpindahan (displacement)
= matriks kekakuan simetris
..… (2-88)
=
……….…. (2-90)
2.6.5 Syarat keseimbangan
Pada persamaan (k) banyaknya persamaan sesuai dengan banyaknya yang tidak diketahui. Untuk contoh Gambar 2.13, maka perpindahan (displacement) adalah:
θx1 = θy1 = wz1 = θx3 = θy3 = wz3 = θx4 = θy4 = wz4 = θx6 = θy6 = wz6 = 0 …...
(2-91)
{ } = ; { } = ; { } = ; { } =
{ } = ; { } =
{ } = ; { } = ; { } = ; { } =
dimana vektor gaya-gaya dalam yang timbul pada simpul 1, 3, 4, 6 akibat
pemb
, lihat pada Gambar 2.15.
ebanan pada struktur (simpul 2) belum diketahui. Dari persamaan (m) terdapat 18 bilangan anu tidak diketahui diantaranya 6 displacement (perpindahan) dan 12 gaya/momen
FZ3
Z
X Y
b
a 1
3
MX3 M
2
4
d
Y3 FZ6
5
6
e c
MX6 MY6
MX4 MY4
FZ4 MX1
MY1 F
y2
wz5
?
Z1
wz2
?x2
?
?x5
y5 wz2
θx2
w
x5 z5
θ
Gambar 2.15 Reaksi Tumpuan dan Displacement pada Grid
Untuk Gambar 2.13, matriks keseluruhan 18 x 18 dapat dijadikan matriks 6 x 6.
Dengan kondisi batas yang telah diketahui, maka baris ke 1 s/d 3, 7 s/d 9, 10 s/d 12, dan 16 s/d 18 dapat dicoreng.
Dengan THEORI –
Prof.DR.Ing Johannes Tarigan, 2008)
{
CHOLESKY (Bahan Kuliah Metode Elemen Hingga
} = { } ……….… (2-92) ‐1
Setelah displa ent pada nodal 2 dan 5 diketahui, maka dengan persamaan (i) dapat dihitung reaksi tumpuan dan dicek kembali apakah perhitungan sudah benar atau belum.
2.6.6 Beban Nodal Ekuivalen
Beban-beban yang bekerja di antara nodal elemen (merata, temperatur) yang bekerja a elem arus ditransformasikan menjadi beban nodal sehingga sesuai dengan tipe peralihan nodal yang didefinisikan.
Dalam luar atau
kerja
titik nodal ekuivalen yang disebabkan oleh beban merata bz per satuan panjang seperti tampak pada Gambar 2.16 (a) dapat dihitung dari persamaan (2.4 – 14) dengan f mengacu pada persamaan (f) pada sub-bab 2.6.1 seperti berikut ini:
pb =
cem
pad en h
metode Beban Nodal Ekuivalen (BNE), kita tetapkan kerja
eksternal yang dihasilkan oleh beban nodal ekuivalen sama besarnya dengan kerja yang dihasilkan oleh beban yang bekerja di antara nodal elemen.
Beban
dx = dx = =
L
x
1 2
z
bz
x q2
q4
q3 q1
y
(a)
L
x
1 2
z
bz x/L bz
x q2
q4
Gambar 2.16 Elemen Lentur Dengan Pembebanan Merata
Dengan cara yang sama, dapat diturunkan beban titik nodal ekuivalen untuk pembebanan segitiga (Gambar 2.16 (b)) seperti yang ditunjukkan oleh persamaan di bawah ini:
pb =
q1 q3
y
(b)
dx = dx = =
Selanjutnya untuk beban titik nodal ekuivalen yang disebabkan oleh berbagai kondisi pembebanan disusun pada Gambar 2.17
Sumber : I. Katili, Metode Elemen Hingga untuk Skeletal, 2008
Gambar 2.17 Beban Nodal Ekuivalen (BNE) untuk Grid Bag.1
z ‐bz
= =
x L
L a
=
=
=
‐bz
=
=
=
L
‐bz
‐bz
‐bz
= =
L
a b a
L
= =
=
=
= =
=
=
=
=
Sumber : I. Katili, Metode Elemen Hingga untuk Skeletal, 2008
Gambar 2.18 Beban Nodal Ekuivalen (BNE) untuk Grid Bag.2 z
x L/2
‐P
L a
= =
=
=
‐P
= =
=
M
=
L/2
b
=
=
=
L/2 L/2 =
‐P
L/3
=
=
=
=
M = =
=
a b =
‐P
L/3 L/3
2.6.7 Persamaan untuk Gaya Dalam
Dengan notasi matriks, gaya-gaya dalam pada grid element dapat ditulis
sebagai persamaan keseimbangan elem pada s i
berikut:
en istem koordinat lokal sebaga
Ke =
= [ ]
= [ ]
=
z ‐bz
x L
L a
= =
=
=
‐bz
=
=
=
L
‐bz
=
‐bz
‐bz L
a b a
L
=
=
= =
= =
= =
=
=
= =
Gambar 2.19 Gaya Internal Ekuivalen (GIE) untuk Grid Bag.1
Sumber : I. Katili, Metode Elemen Hingga untuk Skeletal, 2008
Gambar 2.20 Gaya Internal Ekuivalen (GIE) untuk Grid Bag.2
z
x
L/2
‐P
L a
= =
=
=
‐P
= =
=
M L/2 =
b
= =
= =
L/2 L/2
‐P
L/3
=
=
=
=
M = =
= =
a b
‐P
L/3 L/3