APPLIED MECHANICS AND MATERIALS
"Applied Mechanics and Materials" publishes only complete volumes on given topics, proceedings and complete special topic volumes. We do not publish stand'alone papers by individual authors.
"Applied Mechanics and Materials" specializes in rapid publication of proceedings of
international scientific conferences, workshops and symposia as well as special volumes on topics of contemporary interest in all areas which are related to:
1) Research and design of mechanical systems, machines and mechanisms; 2) Materials engineering and technologies for manufacturing and processing; 3) Systems of automation and control in the areas of industrial production; 4) Advanced branches of mechanical engineering such as mechatronics, computer engineering and robotics.
Authors retain the right to publish an extended, significantly updated version in another periodical.
Volumes are submitted for indexing to
Index Copernicus Journals Master List www.indexcopernicus.com. Google Scholar scholar.google.com.
Cambridge Scientific Abstracts (CSA) www.csa.com.
Inspec (IET, Institution of Engineering Technology) www.theiet.org. SCImago Journal & Country Rank (SJR) www.scimagojr.com.
EBSCO www.ebsco.com.
Thomson Reuters (WoS), all volumes are submitted and selected ones will be indexed.
Please ask for additional information: [email protected]
Irregular: approx. 30'50 volumes per year.
The subscription rate 2016 for
Standing order price: 20% discount off list price
!
Huaqiao University, Ministry of Education Engineering Research Center for Brittle Materials Machining; Xiamen, China, 361021;
!
University of Applied Sciences of Southern Switzerland, Dynamat Laboratory; Via Trevano P.o. Box 12,
Canobbio, 6952, Switzerland;
Harbin Institute of Technology, School of Materials Science and Technology; P.O. Box 435, Harbin,
China, 150001;
Yurga Institute of Technology of National Research Tomsk Polytechnic University; Leningradskaya
Street, 26, Yurga, Russian Federation, 652055;
Slovak University of Technology in Bratislava, Faculty of Materials Science and Technology in Trnava;
Bottova 25, Trnava, 917 24, Slovakia;
Gheorghe Asachi Technical University of IaHi, Department of Machine Manufacturing Technology; D. Mangeron Blvd, 39A, IaHi, 700050, Romania;
Clermont Université, Pascal Institute; UMR 6602 CNRS/UBP/IFMA, BP10448, Clermont'Ferrand, F' 63000, France;
!
Technical University of Kosice, Department of Production Systems and Robotics, Faculty of Mechanical
Engineering; Letná 9, Kosice, 042 00, Slovakia;
" # !
Université de Toulouse, INPT ' Ecole Nationale d’Ingénieurs de Tarbes (ENIT), LGP (Laboratoire Génie
de Production); 47 Avenue d’Azereix, BP1629, Tarbes Cedex, 65016, France;
" $ %
Technical University of Kosice, Faculty of Mechanical Engineering, Department of Production Systems
and Robotics; Nemcovej 32, Kosice, 042 00, Slovakia;
" & ' (
Technical University of Košice, Department of Technical Devices Design; Štúrova 31, Prešov, 08001,
Slovakia;
% & !
University of Glasgow, Department of Mechanical Engineering; Glasgow, United Kingdom, G12 8QQ;
Malaysian Nuclear Agency Bangi, Materials Technology Group (MTEC), Industrial Technology Division; Kajang, Malaysia, 43000;
Politehnica University of Bucharest; Splaiul Independentei 313. Sector VI, Bucharest, 060042, Romania;
# &
TU Kosice, Faculty of Manufacturing Technologies; Bayerova 1, Presov, 08001, Slovakia;
) *"
Friedrich'Alexander'Universität Erlangen'Nürnberg, Institute for Factory Automation and Production Systems; Egerlandstraße 7'9, Germany;
+ (
AGH University of Science and Technology, Department of Robotics and Mechatronics, Faculty of Mechanical Engineering and Robotics; Al. Mickiewicza 30, Krakow, 30'059, Poland;
,
Universiti Kebangsaan Malaysia, Department of Mechanical and Materials Engineering, Faculty of
Engineering and Built Environment, Centre for Automotive Research, Faculty of Engineering and Built
$ #%& ! % # / # ' 6 ! * / % !# * ! &# ! "/ %6
Experimental and Theoretical Investigation of Bolted Bamboo Joints without Void Filled Material
" # $ %& ' ( ) * + ' ( * ' ( * &
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban
Planning
Abstract:An experimental and theoretical are presented to calculate the load capacity of shear single
connection (SSC) and shear double connection...
,-The Significant Importance to Measure Road Safety
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban Planning
Abstract:Although road safety is a huge problem in develop and developing countries, road safety measures are not implemented seriously yet,...
Accessibility to Location of Activities in Denpasar City, Bali'Indonesia
" / " +
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban Planning
Abstract:Denpasar City is the capital of Bali Province with the population of about 0.9 million. Denpasar City has experienced high increase in...
Travel Time Estimation Based on Spot Speed with Instantaneous and Time Slice Model
" $(0( $ " "' ( ! ' (1( 2 *
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban
Planning
Abstract:In off'line applications, travel time is the main parameter of road performance which can be
the main consideration for evaluation and... 3
Port Location Selection Model: Case Study of Tourism Sector in Bali
" 4 & $ + ! " ' ) " ' 56 " $
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban
Planning
Abstract:We employ an integrated model to decide the location of the most optimum harbor
infrastructure of tourism in determining the tourism...
Determining Passenger Car Equivalent for Motorcycle at Mid'Block of Sesetan Road
" ( # 4 & /
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban Planning
Abstract:Motorcycle dominates traffic in Bali, particularly in urban roads, which occupy more than 85% of mode share. The three types of vehicles,...
-,
Readiness Criteria: Indonesias’ New Initiative to Ensure Sustainable Development Program
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban Planning
Abstract:Government of Indonesia through Ministry of National Development Planning/Head of BAPPENAS, recently launched a new initiative in regard to...
3
Conceptual Framework of Bidding Strategy in Order to Improve Construction Project Performance
" ( + 7 " ' 0( ( 4 ' $ " 8 *
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban
Planning
Abstract:Globalization makes the competition ofconstruction is increasingly tight. The competitors
faced not only in the regional district/city,... 3
The Conceptual Framework of Design Change Effects in Some Project Delivery Systems
" ( ( # 7 ' 0( ( 4 ' $( 8 *
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban
Planning
Abstract:Changes will always occur in project construction and can not be avoided. Many factors can cause changes in the construction project. Most...
An Identification of Construction Project Overheads for Sustainable Cost Management and Controlling Practices (CMCPs)
" + $ " 1 + ' + 9 &
Chapter 1: Technologies of Sustainable Development in Civil Engineering, Transportation and Urban
Planning
Abstract:Project overheads are allocated on a percentage basis to project costs and common to
maintain multiple cost objects, but cannot directly be..
Simulation of a Differential'Drive Wheeled Mobile Lego Robot Mindstorms NXT
" ( 8 + 8 " ' .(#( / " ' 7 (/( 8 + 4 :
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:The aim of this paper is to model and simulate kinematics motion using the differential drive model of a mobile Lego robot Mindstorm NXT. The...
;
-Design and Simulation of Five Fingers Gripper for Dexterous Pick'Up Various of Components
" ( 8 + 8 " ' / * ' .(#( / " ' 7 (/( 8 + 4 :
Abstract:In this paper, the authors describe and demonstrate how a Five fingered gripper can be designed and simulated to provide both gross motion...
; ,
Tar Balls Collector for Mechanical Recovery in Combating Oil Spill on the Marine Environment
< " . & / $ " ' $ " 7 ' 5
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:The impacts of oil spill on water pollution are more fatal than on the mainland because the spread of pollutants is larger and more massive....
;;
Three Wheel Bike as Physical Therapy Equipment for Post'Stroke Patient
" ( $ 2 ! ' 4 & ' $ " 4 = >
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:Three wheel bike as a physical therapy equipment for post'stroke patients was designed with
length of 1937 mm, 1010 mm in width and height of... ;;
Geometric Progression Application in Design Transmission Gear Ratio
" ( ( ( ( ? * ' ( # ? ' ( ? &
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:One of the important aspects in determining the competitiveness of an automotive product is
the traction ability or performance, the... ; ;
Role of Risk Management in Effective Maintenance
" 0 7 ' / 9 / *
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:Every manufacturer requires plant maintenance. Knowing that an effective maintenance system increases sales and decreases maintenance cost of...
;
-Redesign Combustion Air Shelter of the Furnace to Improve the Performance in Melting Bronze for Manufacturing Gamelan
" ( # " / ' ( ? # ' ( ( ( ( ? * ' ? * ' (
8 + ! +
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:Gamelan Bali is a set of Balinese traditional musical instruments used to accompany a series
of cultural and religious ceremonies or... ;,,
Model of Carbon Dioxide (CO2) Emission from Motorcycle to the
Manufactures, Engine Displacement, Service Life and Travel Speed
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:By the end of 2012 the population of motorcycle reached 77.7 million units with their
average composition on the road reached 82%. The number... ;
Experimental Study of Heat Transfer Characteristics of Condensed Flow on the Vertical Wave Plates
" 8 "+ 0( / "' @ + 56
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:Studies on the heat transfer characteristics of vertical wave plate subjected to the condensed
steam had been done. This research was done to... ;
Forces Analysis on a Spherical Shaped Delivery Valve of Hydram Pump
" $
Chapter 3: Advanced Decisions in Mechanical Engineering
Abstract:Hydram pump has been found more than two centuries ago, and has been widely developed
Design and Simulation of Five Fingers Gripper for Dexterous
Pick-up Various of Components
I Wayan Widhiada
1,a, Endra Pitowarno
2,b, Cok. Gd. Indra Partha
3,c,
Wayan Reza Yuda A.P
4,d1,4Teknik Mesin, Fakultas Teknik, Universitas Udayana, Indonesia
2Teknik Elektro, Politeknik Elektronika Negeri Surabaya
3Teknik Elektro, Fakultas Teknik, Universitas Udayana, Indonesia
a[email protected], b[email protected], c[email protected] , d [email protected]
Keywords: Five Fingers Gripper, PID control, Gross and Fine Motion
Abstract. In this paper, the authors describe and demonstrate how a Five fingered gripper can be designed and simulated to provide both gross motion and fine motion to the fingers. Satisfactory motion responses for the finger simulation are achieved. The fine motion including force feedback and the gross motions, which orientate the fingers into their approximate configuration is provided by an advance PID control strategy. The fingers are to be controlled in a manner which mimics the kinematics and dynamics of the five fingers of a human hand. This mimicry is required to design the correct motions necessary to handle engineering components. In order to evaluate the design philosophy and capability of the five fingered gripper, a challenging assembly process has been identified. The five fingered gripper assembly was built using Solidworks software tool, and it’s mechanical assembly representation was established in SimMechanics. The advance PID control is very effectively used to control the trajectory of the fingers. The simulation results have been demonstrated that the radius of finger movement is achieved in stable response. The signal error towards closed less than 1% which it indicates the response dynamic system response is stable.
Introduction
Robotic hands have been developed with the aim of copying the human hand in terms of dexterity and adaptive capabilities to function as either a manipulator or as a prosthetic device. Pioneer designs include: Okada’s hand [1] (Okada, 1982) the Stanford/JPL hand [2], the Belgrade/USC hand [3], the Utah/MIT Dexterous hand [4] and the LMS hand [5]. However, significant efforts have still to be made to find designs simple enough to be easily built and controlled, in order to obtain practical systems [6].
Robot fingers and hands are usually confronted with a situation in which a few contact points of each finger take place simultaneously and must be maintained so that the captured object does not slip from the grasp. To this end, a number of methodologies to achieve stable control and dexterous manipulation tasks have been proposed, and a number of related studies published in the late 1980s. A direct-calculation method to capture the style and provide the optimal internal strength so that the internal dependency friction force on the fixed contact is minimized [7].
The driver for this research study arose from a local Small Medium Enterprise (SME) on Merseyside, who manufactured low pressure gas reducing valves for the UK gas industry. This company had attempted to automate the assembly of the valves with a machine consisting of twelve separate work stations with each station dedicated to grasp individual components. Each station was PLC controlled and this control regularly resulted in the components being incorrectly grasped
In this paper the authors describe how a five fingered gripper can be designed and simulated to provide both gross motion and fine motion to the fingers. The fine motion including force feedback and the gross motions which orientate the fingers into their approximate configuration is
Applied Mechanics and Materials Vol. 776 (2015) pp 325-330 Submitted: 2015-02-19
© (2015) Trans Tech Publications, Switzerland Accepted: 2015-04-10
doi:10.4028/www.scientific.net/AMM.776.325
provided by an advance PID control strategy. The fingers are to be controlled in a manner which mimics the kinematics and dynamics of the five fingers of a human hand. This mimicry is required to design the correct motions and tactile forces necessary to handle delicate and non delicate engineering components. In order to evaluate the design philosophy and capability of the five fingered gripper challenging assembly process has been identified.
Five Fingers Gripper Robot Design
In order to demonstrate the expediency of the described robot hand approach, the author’s have developed a three fingered hand prototype by developing five fingers in a 3 dimension model with Solidworks software [10]. Actuators, position sensors and force sensors have been integrated in the hand structure.
The dexterous robot gripper is equipped with four identical fingers (index, middle, fourth, little finger) and a thumb. An actuator is installed in each joint of the fingers and thumb. The joints of the finger, the distal interphalangeal (DIP), proximal interphalangeal (PIP) and metacarpophalangeal (MCP) joints each have 1 DOF to provide a rotation movement. The prismatic sliding joints are also installed at each fingertip of the fingers and thumb. The architecture of the three fingers is show in Fig.1.
Fig. 1. Architecture of Five Fingers Robot Gripper.
The thumb has been designed in order to complete the hand and it has three degrees of freedom. A prismatic sliding element is installed at the end of each finger to facilitate the handling of awkward small compliant geometries. The thumb is both able to flex and extend. The index, middle, forth and little finger prototypes have been designed such that each finger has three degrees of freedom. The prismatic sliding joint is again installed at the end of the fingers to handle small and awkward objects. In order to simulate the finger motions each revolute joint has an associated Servo DC motor attached to it. The extension finger tip is also controlled using a DC motor Servo driving a rack and pinion.
Simulation Technique
Simulation has been identified as a significant study tool for robotic systems since the early of the 20th century [8] and now simulation methods area powerful tool supporting the design, planning, analysis, and decisions in different areas of research and development. The Simulink extension to Matlab was identified in 1990 [9], permitting users to establish continuous a causal design graphically without the need of writing code. Now, Simulink has developed in many directions: adding more blocks, built-in algebraic loop solving, and a physical modeling of toolboxes.
The author has shown through the demonstration of simulation that it is suitable for the fundamental building of mechanical systems. A fundamental of this work is the use of Matlab/Simulink Toolboxes to support the simulation and understanding of the various dynamics systems and in particular how the SimMechanics toolbox is used to interface seamlessly with ordinary Simulink block diagrams to enable the mechanical elements and its associated control
system elements to be investigated in one common environment.
Creating and Modelling A Five Fingers Robot Gripper
The design and 3D modelling of a five fingers robot gripper are worked using Solidworks 2013 as CAD software. This software enables easier 3D model creation for both simulation and hardware implementation. In general, the determination of a models position, orientation, and visualization of the body use transformation matrices. However, when confronted with a complex model with the multi-degree of freedom mechanism analytic solutions are tedious to determine. The software package Solidworks and Matlab/SimMechanics provides an easier method to analyse physical models.
Using SimMechanics, it becomes possible to model and simulate mechanical systems with a suite of tools to specify bodies and their mass properties, their possible motions, kinematic constraints and coordinates system and to initiate and measure body motions. The five fingers gripper assembly was built in Solidwork tool, and it’s mechanical assembly representation exported using SimMechanics. The CAD assembly in Solidworks program is automatically changed to a physical model in XML for import to SimMechanics software. The physical model was created using SimMechanics which assumes that all systems are made of bodies with different DOFs, specific positions, orientations and masses. This model can be used to simulate flexion motion of the fingers. The wrist is modelled by a solid which provides no DOF, the MCP joint is modelled using a revolute block which provides only one DOF (no adduction /abduction motion). The PIP and DIP joints are also modelled using revolute blocks. The palm and the phalanges are modelled using body blocks, which provide the orientation with respect to the general coordinate system (the ground block), the length, the mass, etc. The physical SimMechanics model of one joint of finger is shown in Fig.2.
Fig. 2The abstraction of Physical modelling of thumb gripper
Actuator Modelling
Five fingers gripper robot is installed five servomotors with built in rotation sensor and a gear ratio. A DC servomotor for gripper robot is shown in Fig.3.
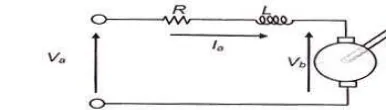
Fig. 3 DC servomotor for gripper robot and DC motor circuit
Speed of motor in robotic is able to change in accessible parameter of source voltage. Motor speed control is required to obtain the various rotation methods and trajectory control. Driving dc servomotor has two direction, forward and reverse.
The armature control DC servomotor with the load will be presented using an algorithm. Consider the DC servomotor armature, where in the armature current is constant. In this system transfer function can be written as shown in Fig.3 as follows in eq. (1):
( )
( ) = [ + + ] = ( + 1) (1)
Where,
Ra= armature of Resistance, ohm, La= armature of inductance, Henry, ia= armature of electricity, ampere, Ea= applied of voltage, volt, = angular displacement motor shaft, radian, T= motor
torque, Nm, J= Inertia Moment ,kg-m2, K
b=coefficient of motor friction, N-m/rad/sec, Ktn=Motor
constant
Trajectory Line
The trajectory planning is necessary to generate the reference inputs to the motion control system, which ensures that the gripper robot executes the planned trajectories.The minimal set of requirement for a gripper robot is to be able to run from an initial position to a final assigned position.
The input of trajectory planning algorithm is the path description, the path constraints and the constraints imposed by a gripper robot dynamics, whereas the outputs are the joint trajectories in terms of a time sequence of the values attained by position, velocity and acceleration.
Position control is used when the robot finger must be moved with or without load along a prescribed trajectory through the mobile robot workspace. The control system of robot gripper is merely a collection of joint controllers each of which is presented to a single joint to drive it individually. The reference signals for these controllers are supplied by a joint trajectory generator determining the desired joint trajectory from the desired trajectory of the robot gripper.
Control Strategy
Position control is used when the robot finger must be moved with or without load along a prescribed trajectory through the robot finger workspace. The control system of robot fingers is simply a collection of joint controllers each of which is dedicated to a single joint and drives it individually. The reference signals for these controllers are supplied by a joint trajectory generator determining the desired joint trajectory from the desired trajectory of the gripper. The joint controller is a feedback controller having two terms respectively proportional to position and velocity errors and introducing proportional and derivative actions (PID control). An advance PID control with auto tuning has been applied to control the kinematics motion in the joint angles of each of the fingers. By tuning suitable values of the three constant gains in the PID controller algorithm, the controller has been found to provide the necessary control action for specific process requirements. The suitable gains of Proportional gain (Kp), Integral (Ki) and Differential gain (Kd) value are determined by auto tuning to achieve a fast response to steady state (setting tune) without excessive overshoot. The error signal is the difference between reference input angle and actual output angle of the system. Parameter Kd works on the change of the error signal, so it can reduce dramatically overshoot effects to reach steady state response.
Fig. 4Control system of a n-DOF Fingers Robot Gripper
Result and Discussion
The simulation results visualization of gripper five fingers kinematics motion are shown in Fig.5. In this gripper robot animation, the fingers gripper move to open and close. In this task there are five position configuration set points of finger which can operate by simulation in Matlab/Simmechanics. Curve signal as input desired is provided in this task to produce the various fingers motion.
Fig. 5 The simulation of a five finger gripper kinematics motion
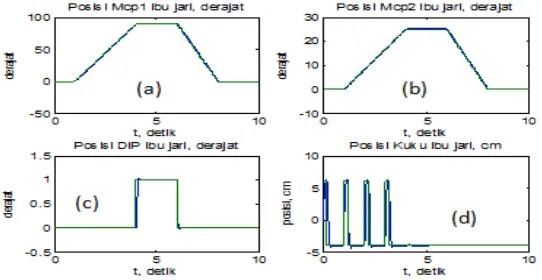
In this paper, the author’s just shows the angle position motion graph in thumb gripper robot as shown in Fig.6.
Fig. 6 Angle position in Thumb gripper robot.
The thumb moves to touch the index finger where an actual angle position in thumb moved from 0o
to 90o in 4 seconds. In this graph shows that the desired position input is located in the same line
position as actual position output. The signal error towards closed less than 1% which it indicates the response of kinematics and dynamics system response is stable. The prismatic sliding element response is shown in Fig. 6(d) and the desired displacement move and back from 5 cm to -5 cm is achieved smoothly in less than 0.2 seconds.
Conclusion
The physical model of the five finger robot gripper is built using SimMechanics software and the application Simmechanics has also been verified with identical outputs when compared with Simulink simulations. These studies indicate that each finger of the gripper can be controlled using the advance PID formulation. PID control is very effectively used to control the trajectory of the fingers. The simulation results have been demonstrated that the radius of finger movement is achieved in stable response. The signal error towards closed less than 1% which it indicates the response dynamic system response is stable.
Acknowledge We are deeply and invaluable gratitude a Minister Department of Research and Technology Republik Indonesia for supporting and finding this SINAS research (APBN 2014) though Letter of assignment in the contract of implementation of Ristek SINAS 2014:288/MKp/XII/2013.
References
[1] Okada,T. “Computer Control of Multi-jointed Finger System for Precise Object Handling” IEEE Trans. Syst., Man, Cybern, 1982,Vol. SMC-12, pp.289–299.
[2] Salisbury,J.K. and CRAIG, J. “Force Control and Kinematic Issues” International Root.Res.Vol.1,pp.4-17, 1982.
[3] Bekey, G., TOMOVIC, R. and ZELJKOVIC, I. “Control Architecture for the Belgrade/USC Hand in Dextrous Robot Hands” New York: Springer-Verlag,pp.136-149, 1999.
[4] Jacobsen, S.C. “Design of the Utah/MIT Dextrous Hand” Proc. IEEE Int. Conf. Robotics and Automation, San Francisco, CA, Vol.3, pp. 1520–1532, 2001.
[5] Gazeau, J. “Force and position control in the aim of the fine manipulation of objects.”Proc. IEEE Int. Conf. Robotics and Automation, Seoul, Korea, Vol.3, pp. 2642–2648, 2001.
[6] Bicchi “Hands for Dexterous Manipulation and Robust Grasping” IEEE Transactions on Robotics and Automation,Vol.16, No.6, pp.652-662, 2000.
[7] Kerr, J. and Roth,B. “Analysis of Multi-fingered Hands” Int. Journal of Robotics Research, Vol.4, No.4, pp.3–17, 1986.
[8] Zlajpah, L. “Simulation in robotics” Mathematics and Computers in Simulation, Slovenia,Vol.79, no.4, 2008.
[9] Moler, C., The growth of MATLAB and The MathWorks over two decades.The MathWorks.com: News and Notes, Jan. 2010
[10] W. Widhiada, S.S. Douglas, I.D.Jenkinson and J.B. Gomm, "Design and control of three fingers motion for dexterous assembly ofcompliant elements", International Journal of Engineering, Science and Technology,Vol. 3, No. 6, 2011, pp. 18-34.