BAB 2
LANDASAN TEORI
2.1. Jaringan Saraf Biologi Manusia
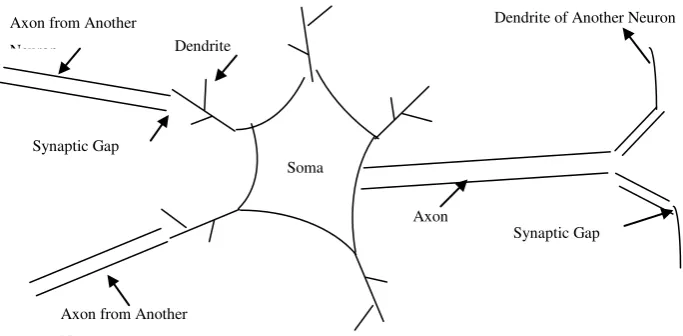
Otak manusia memiliki struktur yang sangat kompleks, serta memiliki kemampuan yang luar biasa. Otak terdiri dari neuron-neuron dan penghubung yang disebut sinapsis. Seperti dapat dilihat pada gambar 2.1 Neuron biologi manusia. Neuron bekerja berdasarkan impuls/sinyal yang diberikan oleh neuron lain. Diperkirakan manusia memiliki 109 neuron dan 6x1018 sinapsis. Dengan jumlah yang begitu banyak, otak mampu mengenali pola, melakukan perhitungan, dan mengontrol organ-organ tubuh dengan kecepatan yang lebih tinggi dibandingkan komputer digital (Puspitaningrum, 2006). Sebagai perbandingan, pengenalan wajah seseorang yang sedikit berubah misal memakai topi, memiliki jenggot dan lainnya akan lebih cepat dilakukan manusia dibandingkan komputer. Pada waktu lahir, otak mempunyai struktur yang menakjubkan karena kemampuannya membentuk sendiri aturan-aturan/pola berdasarkan pengalaman yang diterima. Jumlah dan kemampuan neuron berkembang seiring dengan pertumbuhan fisik manusia, terutama pada umur 0-2 tahun. Pada 2 tahun pertama umur manusia, terbentuk 1 juta sinapsis per detiknya.
Gambar 2.1 Neuron biologi manusia (Medsker & Liebowitz, 1994) Axon
Synaptic Gap
Dendrite of Another Neuron
Axon from Another Neuron
Axon from Another Neuron
Synaptic Gap
Neuron memiliki 3 komponen penting yaitu dendrit, soma dan axon. Dendrit memiliki fungsi menerima sinyal dari neuron lain. Sinyal tersebut berupa impuls elektrik yang dikirim melalui celah sinaptik melalui proses kimiawi. Sinyal tersebut dimodifikasi (diperkuat/diperlemah) di celah sinaptik. Berikutnya, soma menjumlahkan semua sinyal-sinyal yang masuk. Kalau jumlahan tersebut cukup kuat dan melebihi batas ambang (threshold), maka sinyal tersebut akan diteruskan ke sel lain melalui axon. Frekuensi penerusan sinyal berbeda-beda antara satu sel dengan yang lain.
Neuron biologi merupakan sistem yang "fault tolerant" dalam 2 hal. Pertama, manusia dapat mengenali sinyal input yang agak berbeda dari yang pernah kita terima sebelumnya. Sebagai contoh, manusia sering dapat mengenali seseorang yang wajahnya pernah dilihat dari foto, atau dapat mengenali seseorang yang wajahnya agak berbeda karena sudah lama tidak dijumpainya. Kedua, otak manusia tetap mampu bekerja meskipun beberapa neuronnya tidak mampu bekerja dengan baik. Jika sebuah neuron rusak, neuron lain kadang-kadang dapat dilatih untuk menggantikan fungsi sel yang rusak tersebut.
2.2. Jaringan Saraf Tiruan 2.2.1. Latar belakang
Jaringan saraf tiruan dibuat pertama kali pada tahun 1943 oleh Neurophysiologist McCulloch dan Logician Walter Pits. McCulloch dan Pits menyimpulkan bahwa kombinasi beberapa neuron sederhana menjadi sebuah sistem neural akan meningkatkan kemampuan komputasinya. Bobot dalam jaringan yang diusulkan oleh McCulloch dan Pits diatur untuk melakukan fungsi logika sederhana. Pada tahun 1958, Rosenblatt memperkenalkan dan mulai mengembangkan model jaringan yang disebut Perceptron. Metode pelatihan diperkenalkan untuk mengoptimalkan hasil iterasinya.
(single layer). Pada tahun 1986, Rumelhart mengembangkan perceptron menjadi backpropagation, yang memungkinkan jaringan diproses melalui beberapa layer.
2.2.2. Pengertian jaringan saraf tiruan
Jaringan saraf tiruan adalah pemrosesan suatu informasi yang memiliki karakteristik mirip dengan jaringan saraf biologi (Fausett, 1994). Jaringan Saraf Tiruan dibentuk untuk memecahkan suatu masalah tertentu seperti pengenalan pola atau klasifikasi karena proses pembelajaran (Smith, 1996).
Jaringan saraf tiruan dibentuk sebagai generalisasi model matematika dari jaringan saraf biologi, dengan asumsi bahwa :
a. Pemrosesan informasi terjadi pada banyak elemen sederhana (neuron).
b. Sinyal dikirirnkan diantara neuron-neuron melalui penghubung-penghubung. c. Penghubung antar neuron memiliki bobot yang akan memperkuat atau
memperlemah sinyal
d. Untuk menentukan output, setiap neuron menggunakan fungsi aktivasi (biasanyabukan fungsi linier) yang dikenakan pada jumlahan input yang diterima. Besarnya output ini selanjutnya dibandingkan dengan suatu batas ambang
Dapat dilihat pada tabel 2.1 perbedaan antara jaringan saraf tiruan dengan jaringan saraf biologi (Medsker & Liebowitz, 1994).
Tabel 2.1 Perbedaan Saraf Biologi dengan Jaringan Saraf Tiruan (Medsker & Liebowitz, 1994)
Jaringan Saraf Biologi (Manusia) Jaringan Saraf Tiruan (JST)
Soma Node (simpul)
Dendrit Input
Axon Output
Synapse Weight (bobot)
Slow speed Fast speed
Terdiri dari banyak Neuron (109) Beberapa Neuron
2.2.3. Arsitektur jaringan
W11
W1j
W11
Wi1
Wij
Wim
Wnm
Wnj
Wnm
Neuron-neuron pada jaringan diatur menjadi layer-layer. Di dalam tiap layer, neuron-neuron biasanya memiliki fungsi aktivasi yang sama serta pola hubungan yang sama dengan neuron-neuron yang lain. Pengaturan neuron-neuron ke dalam layer dan pola hubungan antar layer dinamakan arsitektur jaringan saraf tiruan. Jaringan saraf tiruan umumnya diklasifikasikan sebagai single layer network dan multilayer network.
a. Single Layer Network
Dalam jaringan single layer, input layer (x) berhubungan langsung dengan ouput layer (y). Masing- masing input terhubung dengan bobot (w) dan menghasilkan output yang berbeda tergantung dari input yang ada. Selama proses training, bobot-bobot akan dimodifikasi berdasarkan aturan tertentu agar menghasilkan keakuratan yang tepat. Dapat dilihat pada gambar 2.2 gambar dari single layer network.
Gambar 2.2 Single Layer Network (Fausett, 1994)
b. Multilayer Network
Jaringan ini merupakan pengembangan dari single layer network. Pada model ini, jaringan mempunyai layer tambahan atau yang sering disebut dengan hidden layer (Z). Keunggulan model ini adalah adalah kemampuannya untuk menghasilkan output yang lebih akurat dari model pertama. Dapat dilihat pada gambar 2.3 gambar multilayer network.
X1 Y1
Xi Yj
Xn Ym
V11
Gambar 2.3 Multilayer Network (Fausett, 1994)
2.2.4. Manfaat Menggunakan Jaringan Saraf Tiruan Berikut manfaat menggunakan Jaringan saraf tiruan.
a. Bersifat adaptif terhadap perubahan parameter yang mempengaruhi karakteristik system.
b. Dapat dilatih untuk memberikan keputusan dengan memberikan set pelatihan sebelumnya untuk mencapai target tertentu, sehingga jaringan saraf tiruan mampu membangun dan memberikan jawaban sesuai dengan informasi yang diterima pada proses pelatihan.
c. Mempunyai struktur paralel yang terdistribusi. Artinya, komputasi dapat dilakukan oleh lebih dari satu elemen pemroses yang bekerja secara simultan. d. Mampu mengklasifikasi pola masukan dan pola keluaran. Melalui proses penyesuaian, pola keluaran dihubungkan dengan masukan yang diberikan oleh jaringan saraf tiruan. Jaringan saraf tiruan ditentukan oleh 3 hal.
1. Pola hubungan antar neuron
Neuron adalah unit pemroses informasi yang menjadi dasar dalam pengoperasian jaringan saraf tiruan. Neuron terdiri dari 3 elemen pembentuk. Elemen-elemen pembentuk neuron tersebut sebagi yaitu, Himpunan unit-unit yang dihubungkan dengan jalur koneksi, unit
penjumlah yang akan menjumlahkan input-input sinyal yang sudah dikalikan dengan bobotnya, fungsi aktivasi yang akan menentukan apakah sinyal dari input neuron akan diteruskan ke neuron lain atau tidak.
2. Metode menentukan bobot penghubung 3. Fungsi aktivasi
Fungsi aktivasi merupakan suatu fungsi yang akan mentransformasikan suatu inputan menjadi suatu output tertentu. Pada jaringan saraf tiruan suatu informasi akan diterima oleh inputan. Inputan ini akan diproses melalui suatu fungsi perambatan. Fungsi ini akan menjumlahkan sejumlah inputan, hasil dari penjumlahan ini kemudian akan dibandingkan dengan nilai ambang (threshold) tertentu melalui fungsi aktivasi terhadap setiap neuron. Jika nilai yang dihasilkan melewati nilai ambang maka neuron tersebut akan diaktifkan jika tidak maka neuron tidak diaktifkan. Artinya neuron akan menghasilkan suatu nilai output jika threshold dilewati.
2.2.5. Paradigma pembelajaran
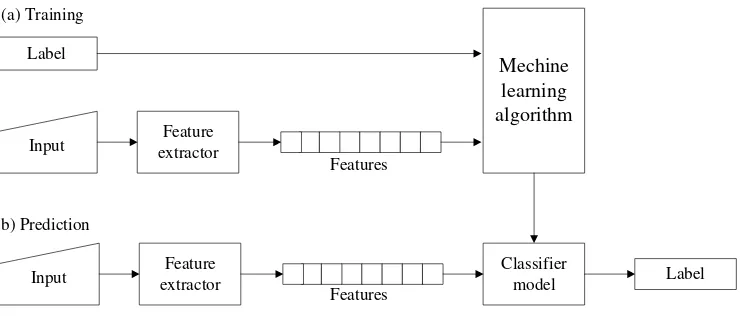
Berikut 2 macam paradigma pembelajaran yang dikenal a. Supervised learning
Input extractorFeature
Mechine learning algorithm
Label
Input extractorFeature Classifier model Label Features
Features (a) Training
(b) Prediction
Gambar 2.4 proses supervised learning (Bird et al, ,2014)
Berdasarkan proses yang dilakukan, kita perlu memperhatikan beberapa hal dalam menyusun set pelatihan, yaitu:
1. Pemberian urutan pola yang akan diajarkan 2. Kriteria perhitungan error
3. Kriteria proses belajar
4. Jumlah iterasi yang harus dilalui 5. Inisialisasi bobot dan parameter awal
Contoh jaringan saraf tiruan supervised learning backpropagation, learning vector quatization.
b. Unsupervised learning
Pada pelatihan unsupervised learning, jaringan tidak mendapatkan target, sehingga jaringan saraf tiruan mengatur bobot interkoneksi sendiri. Unsupervised learning mempelajari bagaimana sistem dapat belajar untuk mewakili pola masukan tertentu dengan cara yang mencerminkan struktur statistik keseluruhan pola masukan (Dayan, 1999). Contoh jaringan saraf tiruan unsupervised learning adalah jaringan Kohonen.
2.3. Learning Vector Quantization
digunakan untuk pengklasifikasian (Biehl, 2006). Hal ini diterapkan dalam berbagai praktis masalah, termasuk medis dan analisis data. Learning vector quantization merupakan salah satu jaringan saraf tiruan, dan merupakan versi supervised learning dari algoritma Kohonen Self-Organizing Map (SOM). Algoritma learning vector quantization bertujuan akhir mencari nilai bobot yang sesuai untuk mengelompokkan vektor-vektor kedalam kelas tujuan yang telah diinisialisasi pada saat pembentukan jaringan Learning vector quantization. Pemrosesan yang terjadi pada setiap vektor adalah mencari jarak antara suatu vektor input ke bobot yang bersangkutan (w1 dan
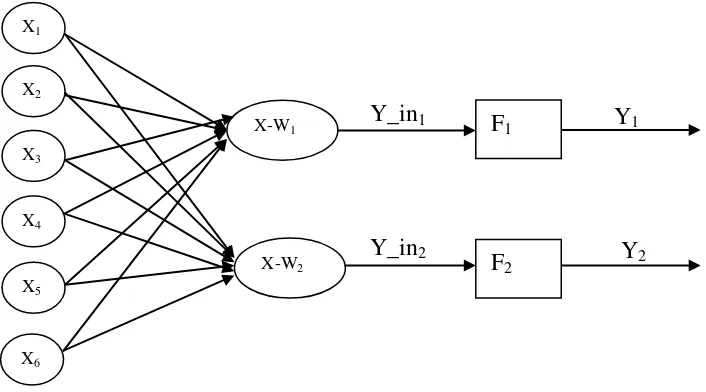
w2). Untuk lebih jelasnya dapat dilihat pada gambar 2.5 Arsitektur jaringan Learning
vector quantization.
Gambar 2.5 Arsitektur Jaringan Learning Vector Quantization (Fausett, 1994) Keterangan:
1. X1, X2 - X6 merupakan vektor inputan. Kemudian vektor-vektor input tersebut
dihubungkan ke vektor W1 dan W2.
2. W1 dan W2 merupakan vektor bobot pertama dan kedua. W1 merupakan vektor
bobot yang menghubungkan setiap neuron pada lapisan input ke neuron
pertama pada lapisan output, sedangkan W2 merupakan vektor bobot yang
menghubungkan setiap neuron pada lapisan input ke neuron yang kedua pada
lapisan output.
3. F1 dan F2 merupakan fungsi aktivasi pertama dan kedua. Fungsi aktivasi F1
akan memetakan y_in1 ke y1 = 1 apabila ||X – w1|| < ||X – w2||, dan y1 = 0 jika
sebaliknya. Demikian pula dengan yang terjadi pada fungsi aktivasi F2, akan
X1
X2
X3
X4
X5
X6
X-W1
X-W2
F1
F2 Y_in1
Y_in2
Y1
memetakan y_in2 ke y2 = 2 apabila ||X – w2|| < ||X – w1||, dan y2 = 0 jika
sebaliknya.
4. Y1 dan Y2 merupakan output pertama dan kedua.
Algoritma training learning vector quantization (Kusumadewi, 2004). 1. Tetapkan
a. Bobot awal variabel input ke-j menuju kelas (cluster) ke-i. b. Parameter learning rate (α)
c. Pengurangan learning rate (Dec α)
d. Minimal learning rate yang diperbolehkan (min α) 2. Masukkan:
a. Data input:Xij
Dengan i = 1, 2, ..., n; dan j = 1, 2, ..., m.
b. Target berupa kelas: Tk;
Dengan k = 1, 2, ..., n.
3. Tetapkan kondisi awal epoch
4. Kerjakan jika (α >=min α)
a. Epoch = epoch + 1;
b. Kerjakan untuk i = 1 sampai n
i. Tentukan j sedemikian hingga ||Xi - Wj||
ii. Perbaiki Wj dengan ketentuan:
o Jika T = Cj maka:
Wj = Wj + α (Xi – Wj)
o Jika T ≠ Cj maka:
Wj = Wj - α (Xi – Wj)
c. Kurangi nilai α.
(Pengurangan α bisa dilakukan dengan: α = α – Dec α; atau dengan Cara: α = α * Dec α).
Setelah dilakukan pelatihan, akan diperoleh bobot-bobot akhir. Bobot-bobot ini
nantinya akan digunakan untuk melakukan simulasi atau pengujian.
Algoritma simulasi (pengujian)
1. Masukkan data yang akan diuji, misal: Xij dengan i = 1, 2, ..., np; dan
j = 1, 2, ..., m.
a. Tentukan J sedemikian hingga ||Xi - Wj|| minimum; dengan
J = 1, 2, ..., k. b. J adalah kelas untuk Xi.
2.4. Penelitian Terdahulu
Terdapat beberapa penelitian terdahulu yang berkaitan dengan learning vector quantization dan produksi kelapa sawit dalam metode prediksi. Beberapa penelitian terdahulu dalam penelitian ini akan dijadikan sebagai bahan acuan agar peneliti dapat memperoleh informasi mengenai topik pembahasan penelitian yang akan dilakukan. Pada tahun 2009, Hermantoro & Purnawan melakukan penelitian dengan judul pemodelan dan simulasi produktivitas perkebunan kelapa sawit berdasarkan kualitas lahan dan iklim menggunakan model Artificial Neural Network.
Data yang akan dijadikan parameter diambil dari beberapa afdeling PT.Sawit Sumbermas Sarana Kalimantan Tengah. Penelitian ini menggunakan 7 data parameter yaitu curah hujan, ketinggian dari permukaan laut, kelerengan, umur tanaman, batuan, solum, dan keasaman tanah. Pada saat training dicoba berbagai struktur model ANN yaitu model :7-3-1, model 7-4-1, dan model 7-51 dengan koefisien laju pembelajaran 0.9, konstanta omentum 0.9 dan konstanta gain 0.9. Berdasarkan hasil penelitian tersebut saat dilakukan test dan dari test tersebut diperoleh model terbaik adalah model 7-3-1, dengan iterasi 30000, laju pembelajaran = 0.9, momentum = 0.9 dan konstanta gain = 0.9 dengan hasil pelatihan (training) R2 = 0.9998 dan RSME = 0.0709 dan pengujian (testing) R2 = 0.8901 dan RSME = 2.2196.
Penelitian selanjutnya yang menjadi acuan penulis yaitu penelitian yang dilakukan Hidayati & Warsito dengan judul Terjangkitnya Penyakit Jantung dengan
nilai 3 jika jenis angina adalah variant pectoris, Diberi nilai 4 jika jenis angina adalah myocardiac infarction. Pada data variabel Kadar gula darah > 120 mg/dl, nilai 0 jika kadar gula darah tidak > 120 mg/dl, diberi nilai 1 jika kadar gula darah > 120 mg/dl. Pada data variabel merokok, diberi nilai 0 jika tidak merokok, Diberi nilai 1 jika merokok kurang dari 3 kali sehari, Diberi nilai 2 jika merokok lebih dari 4 kali sehari.Pada data variabel keturunan diberi nilai 0 jika tidak mempunyai sejarah keluarga yang sakit jantung, dan diberi nilai 1 jika mempunyai sejarah keluarga yang sakit jantung. Pada data variabel olahraga ini, yang dimaksud olah raga adalah olahraga jalan kaki dengan jarak yang ditempuh kurang lebih 4 km. Sedangkan yang dimaksud 0, 1, 2, 3, 4 dan 5 dalam data pasien penyakit jantung adalah frekuensi olah raga tiap minggunya. Pada metode Learning vector quantization, target/sasaran (Y) yang diinginkan juga harus dituliskan. Dalam hal ini targetnya berupa kategori terjangkit penyakit jantung dan tidak terjangkit penyakit jantung. Agar dapat dikenali oleh jaringan, kategori harus diubah ke dalam bentuk numerik, yaitu diiberi nilai 1 jika orang tersebut tidak terjangkit penyakit jantung dan diberi nilai 2 jika orang tersebut terjangkit penyakit jantung. Parameter – parameter yang digunakan pada penelitian tersebut saat melakukan training dengan nilai Alfa (Learning rate), α = 0.25 , DecAlfa (Penurunan Learning rate), Decα = 0.1, MinAlfa (Minimum Learning rate),
Minα = 0.001, MaxEpoch (Maksimum epoch), MaxEpoch = 100. Hasil output