BAB II
LANDASAN TEORI
2.1 Sampah
Menurut definisi World Health Organization (WHO) sampah adalah sesuatu yang tidak digunakan, tidak dipakai, tidak disenangi atau sesuatu yang dibuang yang berasal dari kegiatan manusia dan tidak terjadi dengan sendirinya (Chandra, 2006). Undang-Undang Pengelolaan Sampah Nomor 18 tahun 2008 menyatakan sampah adalah sisa kegiatan seharihari manusia dan/atau dari proses alam yang berbentuk padat.
Sampah merupakan barang sisa yang sudah tidak berguna lagi dan harus dibuang. Tapi definisi sampah menurut para ahli bermacam-macam, berikut definisi sampah menurut para ahli (Kanisius, 2007).
1. Kamus Lingkungan (1994), sampah adalah bahan yang tidak mempunyai nilai atau tidak berharga untuk digunakan secara biasa atau khusus dalam produksi atau pemakaian; barang rusak atau cacat selama manufaktur; atau materi berkelebihan atau buangan.
2. Istilah Lingkungan untuk Manajemen, Ecolink (1996), sampah adalah suatu bahan yang terbuang atau dibuang dari sumber hasil aktivitas manusia maupun proses alam yang belum memiliki nilai ekonomis.
3. Tanjung, Dr. M.Sc., sampah adalah sesuatu yang tidak berguna lagi, dibuang oleh pemiliknya atau pemakai semula.
4. Radyastuti, W. Prof. Ir. (1996), sampah adalah sumber daya yang tidak siap pakai.
5. Basriyanta, sampah merupakan barang yang dianggap sudah tidak terpakai dan dibuang oleh pemilik/pemakai sebelumnya, tetapi masih bisa dipakai kalau dikelola dengan prosedur yang benar.
2.1.1 Macam-Macam Sampah
Jenis sampah yang ada di sekitar kita cukup beraneka ragam, ada yang berupa sampah rumah tangga, sampah industri, sampah pasar, sampah rumah
sakit, sampah pertanian, sampah perkebunan, sampah peternakan, sampah institusi/kantor/sekolah, dan lain sebagainya.
Berdasarkan asalnya, sampah padat digolongkan menjadi tiga, yaitu: 1. Sampah Organik
Sampah organik adalah sampah yang dihasilkan dari bahan-bahan hayati yang dapat didegradasi oleh mikroba atau bersifat biodegradable. Sampah ini dengan mudah dapat diuraikan melalui proses alami. Sampah rumah tangga sebagian besar merupakan bahan organik, misalnya sampah dari dapur, sisa-sisa makanan, tepung, sayuran, kulit buah, daun, dan ranting.
2. Sampah Anorganik
Sampah anorganik adalah sampah yang dihasilkan dari bahan-bahan non-hayati, baik berupa produk sintetik maupun hasil proses teknologi pengolahan bahan tambang. Sampah anorganik dibedakan menjadi: sampah logam dan produk-produk olahannya, sampah plastik, sampah kertas, sampah kaca dan keramik, sampah detergen. Sebagian besar sampah anorganik tidak dapat diurai oleh alam/mikro-organisme secara keseluruhan (unbiodegredable).
3. Sampah B3 (Bahan Berbahaya/Beracun)
Sampah B3 adalah sampah jenis sampah sisa dari bahan-bahan berbahaya dan beracun diperlukan penanganan khusus untuk mengelola jenis sampah ini.
2.1.2 Hubungan Sampah Terhadap Masyarakat dan Lingkungan
pengelolaan sampah di suatu daerah akan membawa pengaruh bagi masyarakat maupun lingkungan daerah itu sendiri. Pengaruhnya tentu saja ada yang positif dan juga ada yang negatif. (Chandra, 2006).
Pengaruh positif dari pengelolaan sampah ini terhadap masyarakat dan lingkungan, antara lain :
a. Sampah dapat dimanfaatkan untuk menimbun lahan semacam rawa-rawa dan dataran rendah
c. Sampah dapat diberikan untuk makanan ternak setelah menjalani proses pengelolaan yang telah ditentukan terlebih dahulu untuk mencegah pengaruh buruk sampah terhadap ternak
d. Pengelolaan sampah menyebabkan berkurangnya tempat untuk berkembang biak serangga atau binatang pengerat
e. Menurunkan insidensi kasus penyakit menular yang erat hubungannya dengan sampah
f. Keadaan estetika lingkungan yang bersih menimbulkan kegairahan hidup masyarakat
g. Keadaan lingkungan yang baik mencerminkan kemajuan budaya masyarakat h. Keadaan lingkungan yang baik akan menghemat pengeluaran dana kesehatan suatu Negara sehingga dana itu dapat digunakan untuk keperluan lain.
Sedangkan pengaruh negatif dari sampah terhadap kesehatan, lingkungan maupun sosial ekonomi dan budaya masyarakat, antara lain :
a. Pengaruh terhadap kesehatan:
1. Pengolahan sampah yang kurang baik akan menjadikan sampah sebagai tempat perkembangbiakan sektor penyakit seperti lalat atau tikus
2. Insidensi penyakit Demam Berdarah dengue akan meningkat karena vector penyakit hidup dan berkembang biak dalam sampah kaleng maupun ban bekas yang berisi air hujan
3. Terjadinya kecelakaan akibat pembuangan sampah secara sembarangan misalnya luka akibat benda tajam seperti besi, kaca dan sebagainya
4. Gangguan psikosomatis, misalnya sesak nafas, insomnia, stress dan lain-lain. b. Pengaruh terhadap lingkungan:
1. Estetika lingkungan menjadi kurang sedap dipandang mata
2. Proses pembusukan sampah oleh mikroorganisme akan menghasilkan gas-gas tertentu yang menimbulkan bau busuk
3. Pembakaran sampah dapat menimbulkan pencemaran udara dan bahaya kebakaran yang lebih luas
4. Pembuangan sampah ke dalam saluran pembuangan air akan menyebabkan aliran air terganggu dan saluran air akan menjadi dangkal
5. Apabila musim hujan datang, sampah yang menumpuk dapat menyebabkan banjir dan mengakibatkan pencemaran pada sumber air permukaan atau sumur dangkal
6. Air banjir dapat mengakibatkan kerusakan pada fasilitas masyarakat seperti jalan, jembatan dan saluran air.
c. Pengaruh terhadap sosial ekonomi dan budaya masyarakat:
1. Pengelolaan sampah yang kurang baik mencerminkan keadaan sosial budaya masyarakat setempat
2. Keadaan lingkungan yang kurang baik dan jorok, akan menurunkan minat dan hasrat orang lain (turis) untuk datang berkunjung ke daerah tersebut
3. Dapat menyebabkan terjadinya perselisihan antara penduduk setempat dan pihak pengelola (misalnya kasus TPA Bantar Gebang, Bekasi)
4. Angka kasus kesakitan meningkat dan mengurangi hari kerja dan produktifitas masyarakat menurun
5. Kegiatan perbaikan lingkungan yang rusak memerlukan dana yang besar sehingga dana untuk sektor lain berkurang
6. Penurunan pemasukan daerah (devisa) akibat penurunan jumlah wisatawan yang diikuti dengan penurunan penghasilan masyarakat setempat
7. Penurunan mutu dan sumber daya alam sehingga mutu produksi menurun dan tidak memiliki nilai ekonomis
8. Penumpukan sampah di pinggir jalan menyebabkan kemacetan lalu lintas yang dapat menghambat kegiatan transportasi barang dan jasa
2.2 Tempat Sampah
Tempat sampah adalah tempat untuk menampung sampah secara sementara, yang biasanya terbuat dari logam atau plastik (National Research Council, 2000).
Di dalam ruangan, tempat sampah umumnya disimpan di dapur untuk membuang sisa keperluan dapur seperti kulit buah atau botol. Ada juga tempat
sampah khusus kertas yang digunakan di kantor. Beberapa tempat sampah memiliki penutup pada bagian atasnya untuk menghindari keluarnya bau yang dikeluarkan sampah. Kebanyakan harus dibuka secara manual, namun saat ini sudah banyak yang menggunakan pedal untuk memudahkan membuka tutup tempat sampah. Beberapa tempat umum seperti taman memiliki tempat sampah yang ditempatkan di sisi sepanjang jalan yang secara frekuentif dapat ditemukan di sisi sepanjang jalan. Hal ini untuk menghindari kebiasaan membuang sampah sembarangan yang dapat mengganggu keindahan dan kesehatan lingkungan serta etika sosial.
2.3 Robot
2.3.1 Sejarah dan Definisi Robot
Kata “ROBOT” pertama kali muncul pada tahun 1921 dalam sebuah drama berjudul R.U.R. (Rossum’s Universal Robots). Karangan Karel Capek (dibaca chop’ek). Kata “ROBOT” berasal dari bahasa ceko “ROBOTA” yang berarti Forced Labor. Kata “ROBOTICS” juga berasal dari sebuah karya cerita pendek fiksi ilmiah karangan Issac Asimov pada tahun 1942 yang berjudul “Runaround”. Cerita pendek tersebut kemudian dimasukkan oleh Isaac Asimov ke dalam buku karangannya yang sangat terkenal, “I, Robot” (Hendy Djaya Siswaja., 2008).
Sebuah robot adalah sebuah unit baik berupa mekanikal atau fisikal maupun yang virtual yang memiliki kecerdasan. Pada umumnya, robot berupa rangkaian elektromekanik yang dapat bergerak dan memiliki akal.
Secara umum, sebuah robot harus memiliki sifat-sifat atau karakteristik sebagai berikut:
1. Sebuah robot tidaklah alami, merupakan hasil rekaan. 2. Dapat merasakan kondisi lingkungannya.
3. Dapat memanipulasi benda-benda yang berada di lingkungannya.
4. Memiliki tingkat kecerdasan tertentu, mampu membuat keputusan berdasarkan lingkungannya, terkontrol secara otomatis (preprogrammed sequence).
6. Dapat bergerak dengan satu atau lebih aksis untuk berputar dan berpindah. 7. Dapat membuat pergerakan yang terkoordinasi dengan baik.
International Standard ISO 8373 mendefinisikan robot sebagai : “An Automatically controlled, reprogrammable, multipurpose, manipulator programmable in three or more axes, which may be either fixed or mobile for use in industrial automation applications.” (Hendy Djaya Siswaja., 2008).
2.3.2 Klasifikasi robot
Secara umum, jenis robot dapat dibedakan dalam 4 kategori (Supriyanto, et al., 2010), yaitu:
2.3.2.1 Non-Mobile Robot
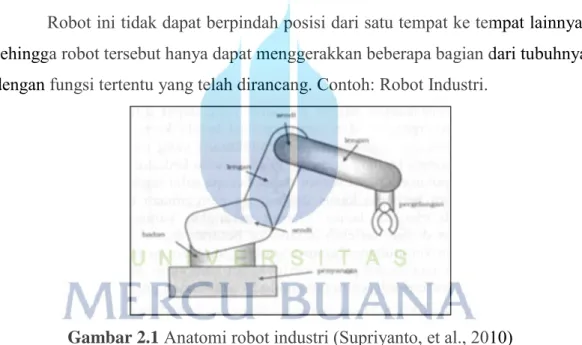
Robot ini tidak dapat berpindah posisi dari satu tempat ke tempat lainnya, sehingga robot tersebut hanya dapat menggerakkan beberapa bagian dari tubuhnya dengan fungsi tertentu yang telah dirancang. Contoh: Robot Industri.
Gambar 2.1 Anatomi robot industri (Supriyanto, et al., 2010)
Anatomi robot industri secara umum dapat diilustrasikan seperti pada gambar 2.1. Robot industri yang diilustrasikan ini adalah robot tangan yang memiliki dua lengan (dilihat dari persendian) dan pergelangan. Di ujung pergelangan dapat diinstal berbagai tool sesuai dengan fungsi yang diharapkan. Jika dipandang dari sudut pergerakan maka terdiri dari tiga pergerakan utama, yaitu badan robot yang dapat berputar ke kiri dan kanan, lengan yang masing-masing dapat bergerak rotasi ke arah atas dan bawah, dan gerak pergelangan sesuai dengan sifat tool.
Mobile dapat diartikan bergerak, sehingga robot ini dapat memindahkan dirinya dari satu tempat ke tempat lain (Supriyanto, et al., 2010). Robot ini merupakan robot yang palingpopuler dalam dunia penelitian robotika. Dari segi manfaat, robot ini diharapkan dapat membantu manusia dalam melakukan otomasi dalam transportasi, platform bergerak untuk robot industri , eksplorasi tanpa awak, dan masih banyak lagi. Contoh:
1. Robot Line Tracker
Robot line tracker merupakan robot yang dapat bergerak mengikuti track berupa garis hitam setebal ±3 cm. Untuk membaca garis, robot dilengkapi dengan sensor proximity yang dapat membedakan antara garis hitam dengan lantai putih. Sensor proximity ini dapat dikalibrasi untuk menyesuaikan pembacaan sensor terhadap kondisi pencahayaan ruangan. Sehingga pembacaan sensor selalu akurat.
2. Robot Terbang (Flying Robot)
Robot yang mampu terbang, robot ini menyerupai pesawat model yang diprogram khusus untuk memonitor keadaan di tanah dari atas, dan juga untuk meneruskan komunikasi.
3. Robot Dalam Air (Underwater Robot)
Robot ini digunakan di bawah laut untuk memonitor kondisi bawah laut dan juga untuk mengambil sesuatu di bawah laut.
2.3.2.3 Kombinasi Mobile dan Non-Mobile Robot
Robot ini merupakan penggabungan dari fungsi-fungsi pada robot mobile dan non-mobile. Sehingga keduanya saling melengkapi dimana robot non-mobile dapat terbantu fungsinya dengan bergerak dari satu tempat ke tempat yang lain (Supriyanto, et al., 2010).
2.3.2.4 Humanoid
Sebuah robot humanoid adalah robot otonom yang dapat beradaptasi dengan perubahan lingkungan atau dirinya sendiri. Ini merupakan perbedaan utama antara jenis humanoid dan jenis robot. Dalam konteks, robot humanoid dapat mencakup, antara lain:
1. Dapat merawat dirinya sendiri (seperti pengisian sumber tenaga sendiri). 2. Dapat belajar otonom (belajar atau memiliki kemampuan baru tanpa
bantuan dari luar (manusia), menyesuaikan diri berdasarkan lingkungan dan beradaptasi dengan lingkungan yang baru).
3. Dapat menghindari hal-hal yang berbahaya bagi manusia, properti, dan dirinya sendiri.
4. Dapat berinteraksi dengan manusia dan lingkungan. (Supriyanto, et al., 2010)
2.4 Arduino ATMega 2560
Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Hardwarenya memiliki prosesor Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri. Saat ini Arduino sangat populer di seluruh dunia. Banyak pemula yang belajar mengenal robotika dan elektronika lewat Arduino karena mudah dipelajari. Tapi tidak hanya pemula, para hobbyist atau profesional pun ikut senang mengembangkan aplikasi elektronik menggunakan Arduino. Bahasa yang dipakai dalam Arduino bukan assembler yang relatif sulit, tetapi bahasa C yang disederhanakan dengan bantuan pustaka-pustaka (libraries) Arduino (https://www.arduino.cc/en/Guide/Introduction).
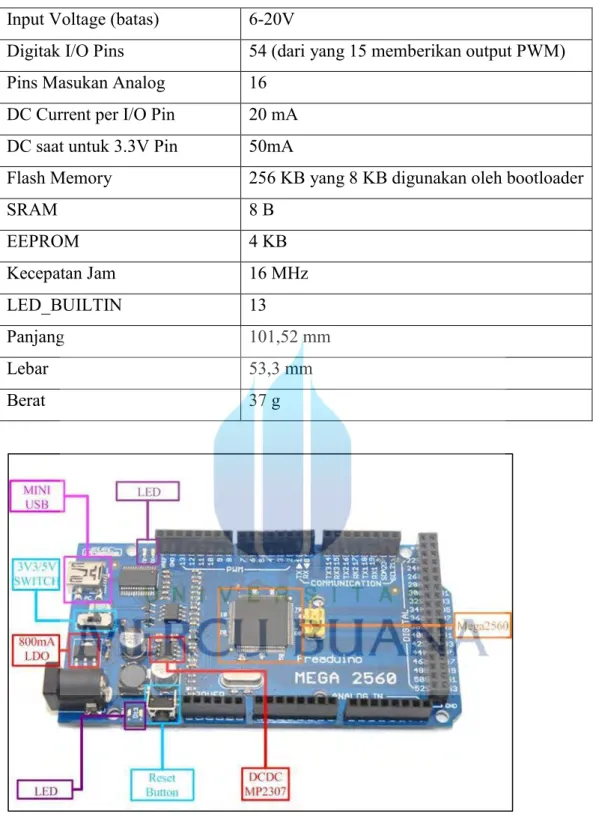
Arduino Mega 2560 adalah papan mikrokontroler berdasarkan ATmega2560. Ini memiliki 54 digital pin input / output (yang 15 dapat digunakan sebagai output PWM), 16 analog input, 4 UART (hardware port serial), 16 MHz osilator kristal, koneksi USB, jack listrik, header ICSP, dan tombol reset. Ini berisi semua yang diperlukan untuk mendukung mikrokontroler; hanya terhubung ke komputer dengan kabel USB atau kekuasaan itu dengan adaptor AC-DC atau baterai untuk memulai. Mega 2560 papan kompatibel dengan sebagian perisai dirancang untuk Uno dan mantan papan Duemilanove atau Diecimila.
Tabel 2.2 Spesifikasi Arduino Mega 2560
Mikrokontroler ATmega2560
Tegangan operasi 5V
Input Voltage (batas) 6-20V
Digitak I/O Pins 54 (dari yang 15 memberikan output PWM) Pins Masukan Analog 16
DC Current per I/O Pin 20 mA DC saat untuk 3.3V Pin 50mA
Flash Memory 256 KB yang 8 KB digunakan oleh bootloader
SRAM 8 B EEPROM 4 KB Kecepatan Jam 16 MHz LED_BUILTIN 13 Panjang 101,52 mm Lebar 53,3 mm Berat 37 g
Gambar 2.2.1 Peta Pin Arduino Mega 2560
(https://www.arduino.cc/en/Main/ArduinoBoardMega2560) 2.4.1 Pin Power
Arduino dapat diberikan power melalui koneksi USB atau power supply. Powernya diselek secara otomatis. PIN power terdapat pada kaki 1 sampai kaki 6.
Power supply dapat menggunakan adaptor DC atau baterai. Adaptor dapat dikoneksikan dengan memasang jack adaptor pada koneksi port input supply. Board Arduino dapat dioperasikan menggunakan supply dari luar sebesar 6 – 20 Volt. Jika supply kurang dari 7V, kadangkala pin 5V akan menyuplai kurang dari 5 volt dan board bisa menjadi tidak stabil. Jika menggunakan lebih dari 12 V, tegangan di regulator bisa menjadi sangat panas dan menyebabkan kerusakan pada board. Rekomendasi tegangan ada pada 7 sampai 12 volt.
Penjelasan pada pin power adalah sebagai berikut :
➢VIN
Tegangan input ke Board Arduino ketika menggunakan tegangan dari luar (seperti yang disebutkan 5 volt dari koneksi USB atau tegangan yang diregulasikan). Pengguna dapat memberikan tegangan melalui pin ini, atau jika tegangan suplai menggunakan power jack, aksesnya menggunakan pin ini.
➢ 5V
Regulasi power supply digunakan untuk power mikrokontroller dan komponen lainnya pada board. 5V dapat melalui Vin menggunakan regulator pada board, atau supply oleh USB atau supply regulasi 5V lainnya.
➢ 3.3V
Suplai 3.3 volt didapat oleh FTDI chip yang ada di board. Arus maximumnya adalah 50mA.
➢ Pin Ground
Berfungsi sebagai jalur ground pada arduino.
➢ Memori
ATmega328 memiliki 32 KB flash memori untuk menyimpan kode, juga 2 KB yang digunakan untuk bootloader. ATmega328 memiliki 2 KB untuk SRAM dan 1 KB untuk EEPROM. Input dan Output Setiap 14 pin digital pada arduino dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maximum 40 mA dan memiliki internal pull-
up resistor (disconnected oleh default) 20- 50 KOhms. Beberapa pin memiliki fungsi sebagai berikut :
Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirim (TX) TTL data serial. Pin ini terhubung pada pin yang koresponding dari USB FTDI ke TTL chip serial.
Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk trigger sebuah interap pada low value, rising atau falling edge, atau perubahan nilai.
PWM : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output PWM dengan fungsi analogWrite().
LED : 13. Ini adalah dibuat untuk koneksi LED ke digital pin 13. Ketika pin bernilai HIGH, LED hidup, ketika pin LOW, LED mati.
➢Konektor USB
Konektor USB adalah soket untuk kabel USB yang disambungkan ke komputer atau laptop. Berfungsi untuk mengirimkan program ke Arduino dan juga sebagai port komunikasi serial.
➢Input / Output Digital
Input/Output Digital atau digital pin adalah pin-pin untuk menghubungkan Arduino dengan komponen atau rangkaian digital. Input/Output digital pada KIT arduino terdapat pada kaki 1 samapai kaki 13. Misalnya kalau ingin membuat LED berkedip, LED tersebut bisa dipasang pada salah satu pin I/O digital dan ground. Komponen lain yang menghasilkan output digital atau menerima input digital bisa disambungkan ke pin-pin ini.
➢Input Analog
Input Analog atau analog pin adalah pin-pin yang berfungsi untuk menerima sinyal dari komponen atau rangkaian analog. Misalnya dari potensiometer, sensor suhu, sensor cahaya, dsb.
Soket baterai atau adaptor digunakan untuk menyuplai Arduino dengan tegangan dari baterai/adaptor 9V pada saat Arduino sedang tidak disambungkan ke komputer. Kalau Arduino sedang disambungkan ke komputer melalui USB, Arduino mendapatkan suplai tegangan dari USB, jadi tidak perlu memasang baterai/adaptor saat memprogram Arduino.
2.5 Gerak
Gerak adalah perubahan atau peralihan posisi, kedudukan atau tempat dari suatu benda atau makhluk hidup dari posisi atau kedudukan awal. Gerak bersifat relatif, yaitu tergantung pada pengamat. Gerak dapat terjadi pada semua benda baik benda mati ataupun benda hidup. Hanya saja jenis gerakan dan penyebabnya berbeda. Pada makhluk hidup, gerakan bisa terjadi karena faktor internal, sedangkan pada benda mati, gerakan biasanya terjadi karena pengaruh faktor eksternal (http://www.kamusq.com/).
Secara umum gerak di bedakan menjadi dua kelompok, yaitu: 1. Gerak pada benda hidup (manusia, hewan dan tumbuhan).
Salah satu ciri makhluk hidup adalah bisa bergerak. Sekecil apapun gerakannya, makhluk hidup pasti bergerak. Meskipun bentuk gerakan yang terjadi berbeda antara satu sama lain. Gerak pada makhluk hidup secara umum juga di bedakan menjadi 2, yaitu
Gerak pada hewan/manusia, makhluk hidup jenis ini bergerak dengan alat gerak khusus yang mereka memiliki sehingga memungkinkan bagi mereka untuk berpindah tempat. Gerak pada hewan dan manusia sangat banyak jenisnya, dan ini akan di bahas lebih lanjut dalam bab tersendiri.
Gerak pada tumbuhan, tumbuhan tidak mempunyai alat gerak khusus, sehingga tidak mungkin berpindah tempat dengan sendirinya. Gerakan pada tumbuhan bersifat gerakan di tempat, seperti bergoyang dll.
Benda mati sebenarnya tidak bisa bergerak jika tidak ada pengaruh dari luar. Pengaruh dari luar itu berubah gaya. Gaya adalah interaksi yang terjadi pada sebuah benda sehingga benda tersebut dapat bergerak. Banyak gaya yang bisa menyebabkan benda mati bisa bergerak, diantaranya:
Gaya gravitasi Gaya elektromagnet Gaya kelembaman, dll.
Gerak pada benda mati di pengaruhhi oleh banyak faktor, diantaranya:
Bentuk benda, benda yang berbelut bulat lebih mudah bergerak dengan berpindah tempat daripad abenda yang berbentuk kotak ataupun segitiga. Ukuran dan massa benda, benda yang berukuran lebih kesil dengan massa
yang kecil juga lebih mudah berpindah tempat dari pada benda berukuran besar dengan massa besar. Karena benda yang berukuran kecil dengan massa kecil dapat dengan mudah tertiup angin dan terbang kemana saja,
Permukaan benda, benda dengan permukaan halus lebih mudah berpindah tempah tempat daripada benda dengan permukaan kasar.
2.6 Motor DC
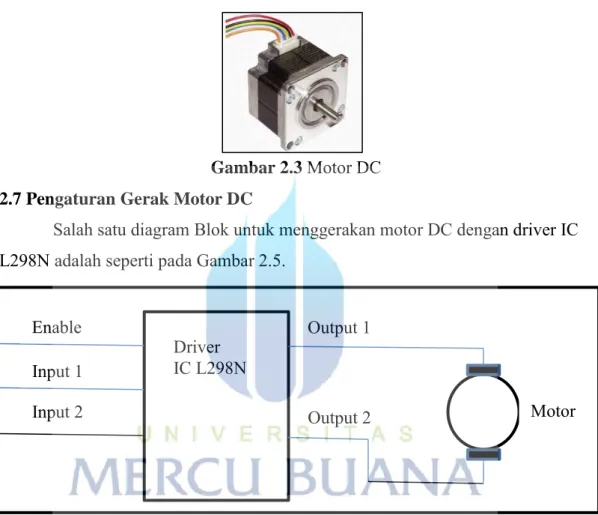
Motor DC adalah motor yang menggunakan sumber tegangan DC dan digunakan untuk mengubah tenaga listrik menjadi tenaga mekanis (Kadir, 2013). Komponen ini bekerja dengan prinsip electromagnet. Ketika sumber tegangan diberikan, medan magnet di bagian yang diam atau disebut stator akan terbentuk. Medan magnet ini membuat rotor atau bagian yang bergerak berputar dan tentu saja dapat dimanfaatkan untuk memutar benda lain, misalnya roda.
Kecepatan putaran motor DC ditentukan oleh besar tegangan. Semakin tinggi tegangannya, semakin cepat putarannya. Namun, tentu saja tegangan yang dapat diberikan ke motor DC ada batasannya. Tegangan yang terlampau tinggi, yang melampaui batas maksimumnya, dapat membuat motor terbakar. Bentuk dari motor DC dapat dilihat pada gambar 2.3.
1. Rotor atau armature, yaitu bagian yang berputar (rotating part). Rotor ini berupa sebuah koil di mana arus listrik mengalir.
2. Stator, yaitu bagian yang tetap (stationery part), Stator ini menghasilkan medan magnet , baik yang dibangkitkan dari sebuah koil (elektromagnet) ataupun magnet permanen.
Gambar 2.3 Motor DC 2.7 Pengaturan Gerak Motor DC
Salah satu diagram Blok untuk menggerakan motor DC dengan driver IC L298N adalah seperti pada Gambar 2.5.
Gambar 2.4 Diagram Blok Pengaturan Motor DC dengan Driver IC L298N. (Budi Raharjo, 2006)
2.7.1 Driver Motor DC
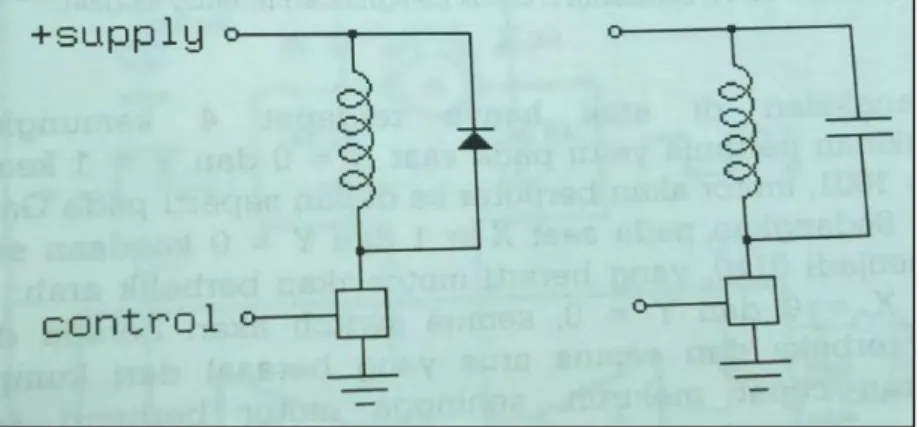
Driver Motor digunakan untuk mengontrol lamanya putaran motor dan Arah putaran motor. Prinsip Kerja dari driver ini hanya dengan melewatkan arus pada motor dan menghentikan arus yang melewati motor serta mengatur arah arusnya dengan menggunakan switch. Kumparan motor merupakan beban induktif, sehingga arus yang melewati kumparan motor tidak dapat dinyalakan dan dimatikan dengan segera. Ketika switch pengontrol kumparan motor
terhubung maka arus akan naik dengan perlahan, akibatnya terjadi Voltage Spike Enable Input 1 Input 2 Driver IC L298N Output 1 Output 2 Motor DC
yang dapat merusak switch. Untuk menghidari Voltage Spike ini digunakan dioda atau kapasitor seperti gambar dibawah ini.
Gambar 2.4.1 Driver Motor dengan pengaman
Driver pada gambar 2.4.1 merupakan driver untuk mengontrol lamanya perputaran motor. Dari gambar tersebut switch digerakkan oleh suatu pulsa yang dibangkitkan oleh PC. Untuk mengontrol arah putaran motor dapat digunakkan jembatan H driver, yang dapat dibuat seperti rangkaian pada gambar 2.4.2
Gambar 2.4.2 Driver Jembatan H
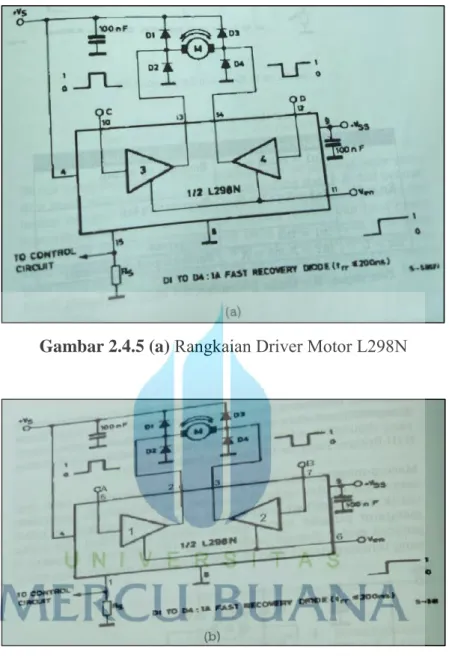
Pada umumnya penggunaan motor DC tidak digerakkan dalam satu arah melainkan dapat digerakkan secara bolak-balik. Untuk mengatur perubahan arah gerak motor ini digunakan driver. Driver yang digunakan adalah IC L298N yang merupakan jenis jembatan H (H-Bridge) yang terdiri dari dua buah jembatan.
Masing-masing jembatan terdiri dari tiga masukkan, yaitu dua masukkan In dan sebuah masukkan En. Masukkan En digunakan untuk mengaktifkan jembatan H sedangkan masukan In untuk mengatur putaran motor seperti terlihat pada Tabel 2.4.1 logika putaran motor. Seperti pada Gambar 2.4.5 dua buah jembatan H yang terdapat dalam satu IC digunakan untuk mengatur dua motor.
Gambar 2.4.5 (a) Rangkaian Driver Motor L298N
Gambar 2.4.5 (b) Rangkaian Driver Motor L298N Tabel 2.4.1 Logika perputaran Motor
Masukkan Fungsi
En = H In1 = H;In2 = L Berputar ke kanan
In1 = L;In2 = H Berputar ke kiri
In1 = In2 Mengerem
En = L In1 = X;In2 = X Berhenti perlahan-lahan Keterangan: H = tinggi, L = rendah, X = tinggi atau rendah
2.8 DC Step Down Converter Module
DC Step Down Converter adalah sebuah alat konversi arus daya dari DC ke DC yang menurunkan tegangan (ketika arus naik) dari input (penyedia daya) ke output (beban). Ini adalah kelas dari Switched Mode Power Supply (SMPS) biasanya mengandung setidaknya dua semikonduktor (dioda dan transistor, meskipun konverter buck modern yang sering mengganti dioda dengan transistor kedua digunakan untuk perbaikan sinkron) dan setidaknya satu elemen penyimpanan energi , kapasitor, induktor, atau dua dalam kombinasi. Untuk mengurangi tegangan riak, filter terbuat dari kapasitor (kadang-kadang dalam kombinasi dengan induktor) biasanya ditambahkan untuk keluaran seperti converter (load-side filter) dan input (supply-side filter).
Gambar 2.5 Diagram sirkuit Converter. (Mammano, Robert, 2001).
2.9 Arduino IDE
Arduino IDE merupakan Open-source Arduino Software (IDE), memudahkan untuk menulis kode dan meng-upload ke papan arduino. Berjalan pada Windows, Mac OS X, dan Linux. dibuat dengan menggunakan Java dan berdasarkan Pengolahan dan perangkat lunak open source lainnya. Perangkat lunak ini dapat digunakan dengan papan Arduino. (https://www.arduino.cc/en/Main/Software) IDE Arduino adalah software yang dibuat dengan menggunakan Java. IDE Arduino terdiri dari:
Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Processing.
Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah microcontroller tidak akan bisa
memahami bahasa Processing. Yang bisa dipahami oleh microcontroller adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
Uploader, sebuah modul yang memuat kode biner dari Jomputer ke dalam memory di dalam papan Arduino.
2.9.1 Pemrograman Dasar Arduino
Struktur dasar arduino hanya terjadi dalam dua bagian: Void setup()
{
// Statement; di eksekusi satu kali }
Void loop() {
// Statement; di eksekusi terus menerus }
2.9.1.1 Setup
Fungsi setup() hanya dipanggil satu kali ketika program pertama kali di jalankan. Ini digunakan untuk mendifinisikan mode pin atau memulai komunikasi serial. Fungsi setup() harus di ikut sertakan dalam program ,walaupun tidak ada statement yang di jalankan. Contoh pemrograman yang menggunakan fungsi setup sebagai berikut:
Void setup () {
pinMode(3,OUTPUT) ; // men-set “pin” 3 sebagai Output pinMode(6, INPUT); // men-set pin 6 sebagai Input Serial.begin(9600); }
Keterangan:
pinMode() = berfungsi untuk mengatur fungsi sebuah pin sebagai INPUT atau OUTPUT.
Serial.begin(9600) = digunakan untuk mengaktifkan fitur UART dan menginisialisasinya.
2.9.1.2 Loop
Setelah melakukan fungsi setup() maka secara langsung akan melakukan fungsi loop() secara berurutan dan melakukan instruksi-instruksi ayang ada dalam fungsi loop().
void loop() {
If (digitalRead(6)==HIGH) // membaca input digital pin 6 {
xstart = millis(); //aktifkan timer digitalWrite(3, HIGH); // nyalakan pin 3 delay(1000); // pause 1detik
digitalWrite(3, LOW); // matikan pin 3 }
}
Keterangan:
digitalWrite : Untuk memberikan nilai LOW dan HIGH pada sebuah pin output.
Delay : Untuk memberikan waktu tunda dalam satuan millisekon.
digitalRead : Untuk membaca logika LOW dan HIGH.
2.9.1.3 Struktur Pengaturan Program
Program sangat tergantung pada pengaturan apa yang akan dijalankan berikutnya, berikut ini adalah elemen dasar pengaturan program:
if..else, dengan format seperti berikut ini: if (kondisi) { }
else if (kondisi) { } else { }
Dengan struktur seperti diatas program akan menjalankan kode yang ada di dalam kurung kurawal jika kondisinya TRUE, dan jika tidak (FALSE) maka
akan diperiksa apakah kondisi pada else if dan jika kondisinya FALSE maka kode pada else yang akan dijalankan.
for, dengan format seperti berikut ini:
for (int i = 0; i < #pengulangan; i++) { }
Digunakan bila anda ingin melakukan pengulangan kode di dalam kurung kurawal beberapa kali, ganti #pengulangan dengan jumlah pengulangan yang diinginkan. Melakukan penghitungan ke atas dengan i++ atau ke bawah dengan i– .
2.9.1.4 Input/Output Digital a. pinMode(pin, mode)
Digunakan untuk menetapkan mode dari suatu pin, pin adalah nomor pin yang akan digunakan dari 0-19 (pin analog 0-5 adalah 14-19). Mode yang bisa digunakan adalah INPUT atau OUTPUT.
b. digitalWrite(pin, value)
Ketika sebuah pin ditetapkan sebagai OUTPUT, pin tersebut dapat dijadikan HIGH (ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground). c. digitalRead(pin)
Ketika sebuah pin ditetapkan sebagai INPUT maka anda dapat menggunakan kode ini untuk mendapatkan nilai pin tersebut apakah HIGH (ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground).
2.9.1.5 Input/Output Analog
Arduino adalah mesin digital tetapi mempunyai kemampuan untuk beroperasi di dalam alam analog (menggunakan trik). Berikut ini cara untuk menghadapi hal yang bukan digital.
a. analogWrite(pin, value)
Beberapa pin pada Arduino mendukung PWM (pulse width modulation) yaitu pin 3, 5, 6, 9, 10, 11. Ini dapat merubah pin hidup (on) atau mati (off) dengan sangat cepat sehingga membuatnya dapat berfungsi layaknya keluaran
analog. Value (nilai) pada format kode tersebut adalah angka antara 0 ( 0% duty cycle ~ 0V) dan 255 (100% duty cycle ~ 5V).
b. analogRead(pin)
Ketika pin analog ditetapkan sebagai INPUT anda dapat membaca keluaran voltase-nya. Keluarannya berupa angka antara 0 (untuk 0 volts) dan 1024 (untuk 5 volts).
2.10 Bahasa C
Akar dari bahasa C adalah dari bahasa BCPL yang dikembangkan oleh Martin Richards pada tahun 1967. Bahasa ini memberikan ide kepada Ken Thompson yang kemudian mengembangkan bahasa yang disebut dengan B pada tahun 1970. Perkembangan selanjutnya dari bahasa B adalah bahasa C oleh Dennis Richie sekitar tahun 1970-an di Bell Telephone Laboratories Inc. (sekarang adalah AT&T Bell Laboratories). Bahasa C pertama kali digunakan di komputer Digital Equipment Corporation PDP-11 yang menggunakan sistem operasi UNIX (Jogiyanto Hartono, 1993).
C adalah bahasa yang standar, artinya suatu program yang ditulis dengan versi bahasa C tertentu akan dapat dikompilasi dengan versi bahasa C yang lain dengan sedikit modifikasi. Standar bahasa C yang asli adalah standar dari UNIX. Patokan dari standar UNIX ini diambilkan dari buku yang ditulis oleh Brian Kerninghan dan Dennis Ritchie berjudul “The C Programming Languange”, diterbitkan oleh Prentice-Hall tahun 1978. Deskripsi C dari Kerninghan dan Ritchie ini kemudian dikenal secara umum sebagai “K&R C”.
2.10.1 Struktur Program C
Struktur dari program C dapat dilihat sebagai kumpulan dari sebuah atau lebih fungsi-fungsi. Fungsi pertama yang harus ada di program C sudah ditentukan namanya, yaitu bernama main(). Suatu fungsi di program C dibuka dengan kurung kurawal ({) dan ditutup dengan kurung kurawal tutup (}). Di antara kurung-kurung kurawal dapat dituliskan statement-statement program C. Berikut ini adalah struktur program C.
main() // fungsi utama {
statement-statement; }
Fungsi_fungsi_lain() // fungsi-fungsi lain yang ditulis oleh //pemrogram komputer
{
statement-statement; }
Bahasa C dikatakan sebagai bahasa pemrograman terstruktur, karena strukturnya menggunakan fungsi-fungsi sebagai program-program bagian (subroutine). fungsi selain fungsi utama merupakan program-program bagian. Fungsi-fungsi ini dapat ditulis setelah Fungsi-fungsi utama diletakkan di file pustaka (library). 2.11 Flowchart
Flowchart adalah bagan- bagan yang mempunyai arus yang menggambarkan langkah- langkah penyelesaian suatu masalah. Bagan alir program (program flowchart) adalah suatu bagan yang menggambarkan arus logika dari data yangkan diproses dalam suatu program dari awal sampai akhri. Bagan alir terdiri dari simbol-simbol yang mewakili fungsi-fungsi langkah program dan garis alir (flowlines) menujukan urutan dari simbol-simbol yang akan dikerjakan.
Flowchart dalam Bahasa Indonesia diterjemahkan sebagai Diagram Alir. Dari dua kata ini, maka dapat kita bayangkan bahwa flowchart itu berbentuk diagram yang bentuknya dapat mengalirkan sesuatu. Hal ini memang benar, flowchart memang melukiskan suatu aliran kegiatan dari awal hingga akhir mengenai suatu langkah-langkah dalam penyelesaian suatu masalah. Masalah yang kita pelajari tentu saja masalah pemrograman dengan menggunakan komputer, tetapi secara logika dapat kita awali dengan mengamati permasalahan dalam kehidupan sehari-hari kita. Contoh sederhananya adalah masalah membuat secangkir kopi. Dalam membuat secangkir kopi, tentu saja diperlukan langkah-langkah yang berurutan agar hasilnya dapat sesuai dengan apa yang kita inginkan, yaitu secangkir kopi. Demikian halnya dalam memprogram, diperlukan suatu algoritma agar program yang kita buat dapat berjalan dan memberikan hasil yang valid. (A. B. bin Ladjamudin, 2005).
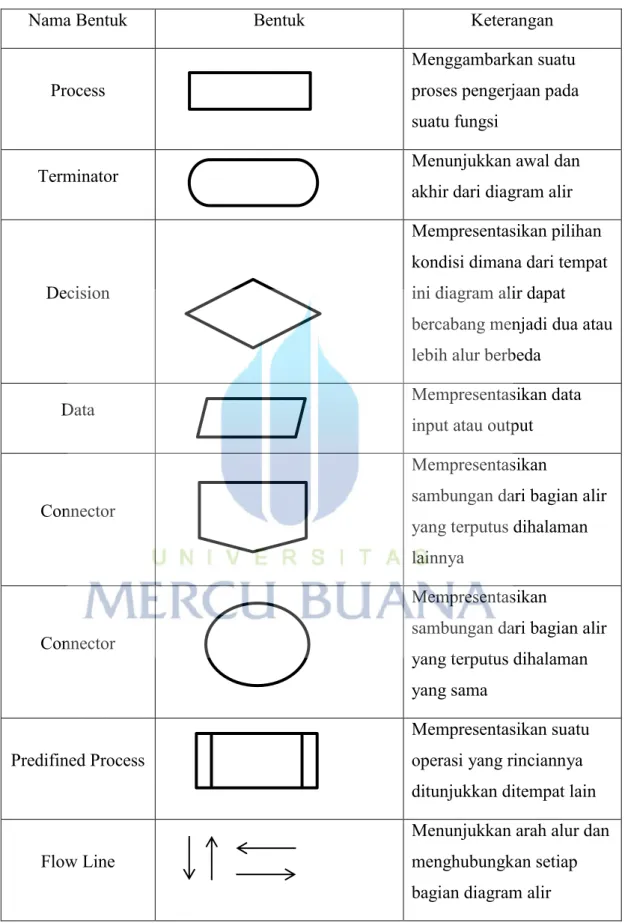
Tabel 2.8 Diagram Flowchart
Nama Bentuk Bentuk Keterangan
Process
Menggambarkan suatu proses pengerjaan pada suatu fungsi
Terminator Menunjukkan awal dan
akhir dari diagram alir
Decision
Mempresentasikan pilihan kondisi dimana dari tempat ini diagram alir dapat bercabang menjadi dua atau lebih alur berbeda
Data Mempresentasikan data
input atau output
Connector
Mempresentasikan
sambungan dari bagian alir yang terputus dihalaman lainnya
Connector
Mempresentasikan
sambungan dari bagian alir yang terputus dihalaman yang sama
Predifined Process
Mempresentasikan suatu operasi yang rinciannya ditunjukkan ditempat lain
Flow Line
Menunjukkan arah alur dan menghubungkan setiap bagian diagram alir