ANALISA SINYAL GETARAN POMPA SEBAGAI PREDICTIVE
MAINTENANCE POMPA PADA LABORATORIUM REKAYASA
AKUSTIK DAN VIBRASI TEKNIK FISIKA – ITS
Nadhifa Maulida1, Alinda Nurul B.1, Trikarsa Tirta Dwipa1, Nugroho Raharjo A1, Naindar Afdany1, Aditya Isman1, dan Andi Rahmadiansah, ST, MT2
Jl. Arief Rahman Hakim, Surabaya 60111
E-mail : [email protected], [email protected], [email protected] Abstrak – Pada dunia industri, vibrasi dari
suatu mesin berputar dimanfaatkan sebagai dasar dalam menyusun langkah serta jadwal maintenance. Salah satu strategi maintenance yang dapat digunakan adalah Predictive Maintenance. Predictive Maintenance merupakan salah satu metode untuk merawat alat. Salah satu instrumen yang sering dijadikan penerapan Predictive Maintenance adalah rotary machine. Percobaan dilakukan pada 3 arah secara axial, vertikal, horisontal kemudian didapatkan masing-masing grafik dengan menggunakan analisa spectrum frekuensi dari MATLAB. Pengukuran rpm dilakukan menggunakan stroboskop. Data yang diperoleh saat pengukuran pompa menggunakan stroboskop sebesar 2980rpm. Kesimpulan yang dapat diambil antara lain hasil monitoring vibrasi terhadap pompa didapatkan jenis kerusakan Unbalance dikarenakan posisi putaran tidak seimbang akibat adanya
ketidakseimbangan impeller (unbalanced)
. Hasil monitoring RPM pompa menunjukkan data kerusakan yang sama pada frekuensi 50 Hz dan 100Hz.Kata kunci : vibrasi, stroboskop, rpm, frekuensi
I. Pendahuluan
Pompa merupakan salah satu perangkat yang berfungsi untuk mengmindahkan fluida dari tempat satu ke tempat lainnya dengan memanfaatkan perbedaan tekanan, guna dapat menaikkan tekanan dan kecepatan fluida tersebut. Pentingnya fungsi pompa dalam suatu proses baik skala rumahan hingga skala industri khususnya yang berhubungan dengan perlakuan fluida. Oleh karena penggunaan pompa yang secara kontinyu dapat menyebabkan penurunan performansi dan kualitas dari pompa, belum lagi ketidak sempurnaan manufaktur pada saar
pembuatan. Penurunan kualitas kinerja pompa di tunjukkan dengan level vibrasi yang mulai naik atau yang ditandai dengan munculnya suara yang tidak wajar pada pompa. Jika ketidaknormalan kinerja pompa dibiarkan dan pompa tetap dipaksa bekerja, maka dapat mengakibatkan timbulnya kerusakan jenis lain yang nantinya dapat mengakibatkan pompa trip semakin cepat. Penurunan kualitas pompa ini dapat dilakukan analisa melalui level vibrasi yang dihasilkan, jika level vibrasi melebihi batas yang telah ditentukan maka perlu dilakukan analisa dengan mengginakan FFT (Fast Fourier Transform) untuk menginvestigasi kerusakan yang terjadi pada pompa (Yudhistira, 2015). Namun FFT ini tidak dapat digunakan untuk mempresiksi waktu yang dibutuhkan pompa sejak awal dioperasikan hingga pompa mengalami trip. Oleh Karena itu, dalam penelitian ini dilakukan analisa sinyal getaran pompa dengan menggunaan Hilbert transform dan Cepstrum analisys.
II. Teori Penunjang
2.1 Pompa
Pompa adalah suatu alat yang digunakan untuk memindahkan suatu fluida dari suatu tempat ke tempat lain dengan cara menaikkan tekanan cairan tersebut. Standart pompa sesuai dengan API 610, ISO 5199, DIN 24256 (Martianis, 2012).
2.2 Vibrasi Pompa
Pompa merupakan alat yang berfungsi untuk menimbulkan perbedaan tekanan dalam fluida sehingga menyebabkan fluida dapat bergerak. Pompa digerakkan oleh motor listrik. Daya motor listrik penggerak pompa bergantung pada nilai debit pompa, jika debit pompa besar maka daya motor listrik besar dan sebaliknya. Proses manufaktur di industri pompa dan motor listrik tidak sempurna 100 % menyebabkan beberapa
bagian pompa yang digabungkan tidak tergabung dengan sempurna. Toleransi manufaktur yang demikian menyebabkan vibrasi ketika pompa dan motor listrik dioperasikan. Batas toleransi manufaktur ditentukan oleh level vibrasi berdasarkan ISO 7327. Pompa yang dioperasikan secara kontinyu akan mengalami penurunan kualitas yang diindikasikan dengan level vibrasi yang mulai naik. Jika level vibrasi melebih batas yang telah ditentukan maka perlu dilakukan analisa lebih lanjut menggunakan FFT untuk diinvestigasi kemungkinan kerusakan yang terjadi pada pompa. Jika pompa dengan kerusakan tertentu tetap dioperasikan tanpa menghiraukan kerusakan tersebut, maka akan timbul kerusakan jenis lain yang dapat menyebabkan pompa trip semakiin cepat. Kerusakan lain yang timbul dapat dideteksi menggunakan FFT. Namun FFT tidak dapat digunakan untuk memprediksi waktu yang dibutuhkan pompa sejak awal dioperasikan hingga trip. Dalam peneletian ini diusulkan penggunaan Hilbert transform untuk memprediksi waktu trip pompa yang akan dikaitkan dengan analisa reliability pompa. 2.3 Predictive Maintenance
Proses pembangkitan listrik tenaga panas bumi melibatkan beberapa mesin besar, yaitu scrubber, turbin, kondensor, hot well pump, cooling tower, dan reinjection pump. [1] Turbin
merupakan komponen kategori critical 1 merupakan komponen yang dapat menyebabkan seluruh pembangkit listrik shut down jika komponen trip. Untuk menjaga performa pembangkit listrik dalam kondisi baik dan mencegah terjadinya shut down yang tidak diinginkan perlu dilakukan perawatan terhadap turbin. Jenis perawatan yang digunakan adalah perawatan prediktif (predictive maintenance). Predictive maintenance adalah perawatan yang dilakukan berdasarkan kondisi terkini suatu mesin atau sistem. Komponen mesin yang rusak atau diindikasikan akan segera rusak segera diganti. [2] Perawatan prediktif dapat mengoptimalkan kendalan sistem dan menghemat inventaris suku cadang karena tidak semua suku cadang komponen harus disediakan. [2] Perawatan prediktif dilakukan dengan mengukur dan menganalisa parameter fisis yang terjadi di turbin, yaitu getaran, suhu, displacement, dan kekentalan oli. Parameter
getaran yang dapat diamati yaitu akselerasi, kecepatan, dan perpindahan getar (Yudhistira, 2015).
2.4 PengukuranVibrasi
Secara umum sistem pengukuran dapat digambarkan dalam blok diagram sebagai berikut:
Gambar 1. Diagram blok pengukuran Pada pengukuran vibrasi sinyal input berupa getaran mekanik diubah oleh tranduser menjadi sinyal tegangan kemudian ditransmisikan keelemen pengkondisisinyal, diproses oleh elemen pemroses sinyal dan akhirnya ditampilkan dalam bentuk data angka maupun grafik (spektrum, waveform dan trend).
Sesuai dengan tigabesaran pada vibrasi maka tranduser yang digunakan untuk tugas akhir dalam pengukuran vibrasi adalah :
Accelerometer
Accelerometer merupakan tranduser yang paling sering dipakai karena fleksibilitasnya dan range frekuensinya tinggi. Biasanya berupa piezolelectric yang terdiri dari kristal dan massa penekan kristal. Ketika terjadi vibrasi maka terjadi penekanan dan kristal akan membangkitkanmuatanlistrikyang kemudiandi-amplifikasi sehingga sinyal vibrasi terbaca.
Gambar 2. Sinyal vibrasi dari accelerometer
Elemen pengkondisisinyal (signal conditioning) pada sistem pengukuran vibrasi berupa amplifier yang menguatkan sinyal agar dapat diproses oleh signal processing. Sepuluh tahun yang lalu, accelerometer masih menggunakan externalamplifier, namun saat ini kebanyakan amplifier sudah tersedia dalam tranduser itu sendiri, disebut internally amplified Accelerometer atau integrated circuitpiezoelectric (ICP).
2.5 Pengambilan Data Menggunakan
Accelerometer
Tranduser getaran dipasang pada bagian-bagian mesin yang cukup kaku untuk menghindari efek resonansi lokal bagiantersebut. Pengambilan data-data dengan alat tranduser tersebut harus terlebih dahulu mengetahui bagianmana dari mesin tersebut yang paling tepat untuk pengukuran vibrasi. Tempat yang paling tepat tersebut adalah pada tempat yang dekat dengan sumber vibrasi, misalnya pada kerusakan bearing maka penempatan tranduser diletakkan pada bearing caps (rumah bearing). Pengambilan data vibrasi dilakukan dengan dua posisi yaitu dengan posisi axial dan posisi radial. Pengambilan data secara axial adalah menempatkan alat tranduser pada arah axial atau searah dengan poros. Cara radial sendiri terbagi menjadi 2 cara, yaitu:
Horizontal
Pengukuran secara horizontal dengan cara meletakkan alat tranduser secara horizontal misalnya pada bagian atas pompa. Dari pengukuran ini dapat diketahui amplitudo yang paling tinggi.
Vertikal
Pengambilan data secara vertikal adalah dengan menempatkan alat tranduser pada posisi vertikal atau berbanding 90o dengan arah horizontal pada pompa.
Pengambilan data pada tiga sumbu berfungsi untuk melihat kondisi vibrasi pada masing-masing sumbu,karena disetiap sumbu mempunyai vibrasi yang berbeda.Pada setiap kondisi mesin dapat ditentukan karakteistik kerusakan dengan melihat sinyal vibrasidari masing-masing sumbu pengukuran.
Gambar 3. Posisi sensor accelerometer III. Metodologi Penelitian
3.1. Objek Penelitian
Objek yang digunakan dalam penilitian adalah pompa di ruang kedap Laboratorium Vibrasi dan Akustik Teknik Fisika ITS. Pompa yang digunakan di laboratorium memiliki spesifikasi sebagai berikut:
Daya 125 Watt
Debit 30 liter/menit
Kecepatan putar 3000 rpm (50 Hz)
Penggerak pompa adalah motor listrik 1 Fasa
Gambar 4. Pompa Air Laboratorium
3.2. Pengambilan Data Getaran Pompa
Pompa air dioperasikan pada kondisi kecepatan normal 2987 rpm tanpa beban air. Data getaran diambil menggunakan vibrometer National Instrument dengan akselerometer array 3 sumbu yang diletakkan pada sumbu aksial, horisontal, dan vertikal. Hasil pengukuran getaran berupa akselerasi getaran.
Gambar 5. Konfigurasi Pengukuran Getaran menggunakan Akselerometer Array pada 3
Sumbu
Akselerometer dihubungkan ke NI-DAQ 9178 yang berfungsi sebagai ADC (Analog to Digital Converter). Data digital dari NI-DAQ dikirim ke laptop untuk ditampilkan dan disimpan. Pengambilan data dilakukan menggunakan dua buah laptop, satu laptop dihubungkan dengan DAQ di dalam ruang kedap untuk mengambil dan menyimpan data getaran, laptop tersebut dikendalikan dari luar ruang kedap menggunakan laptop lain melalui wifi demi keselamatan kerja dalam pengambilan data. Pompa air yang digunakan dalam penelitian dikondisikan unbalance pada bagian impeller.
Gambar 6. Pompa Unbalance Impeller Pompa dengan satu jenis kerusakan dinyalakan hingga trip. Data getaran diambil tiap satu menit dengan durasi 10 detik tiap data mulai pompa dinyalakan hingga trip. Frekuensi sampling ditentukan sebesar 16000 Hz agar didapatkan data yang detail namun tidak terlalu berat ketika diolah.
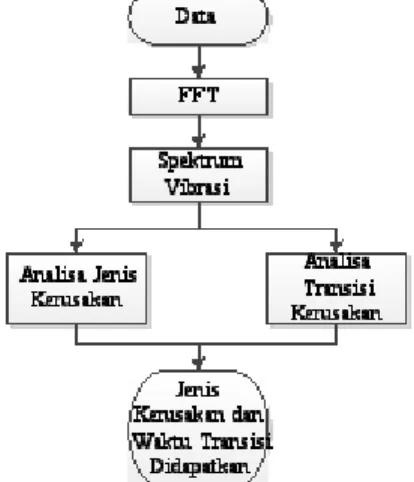
3.3. Analisa Data dengan FFT
Kerusakan pada pompa dengan unbalance di bagian depan menyebabkan kerusakan lain pada pompa ketika pompa tetap dinyalakan dalam kondisi unbalance. Kerusakan yang ditimbulkan berupa looseness pada bearing house bagian
belakang motor pompa. Untuk menentukan waktu transisi kerusakan unbalance-looseness terjadi digunakan algoritma FFT (Fast Fourier Transform). FFT juga dapat digunakan untuk menentukan jenis kerusakan pompa. Data vibrasi pompa pada menit pertama dan menit akhir diolah menggunakan FFT untuk memastikan jenis kerusakan pompa. Data vibrasi antara menit pertama dan menit akhir juga diolah dengan FFT untuk didapatkan spectrum yang mengindikasikan looseness yang pertama. Saat looseness terindikasi pertama kali merupakan waktu transisi terjadi.
Gambar 7. Diagram Alir Pengolahan Data Menggunakan FFT
IV.Analisa Data
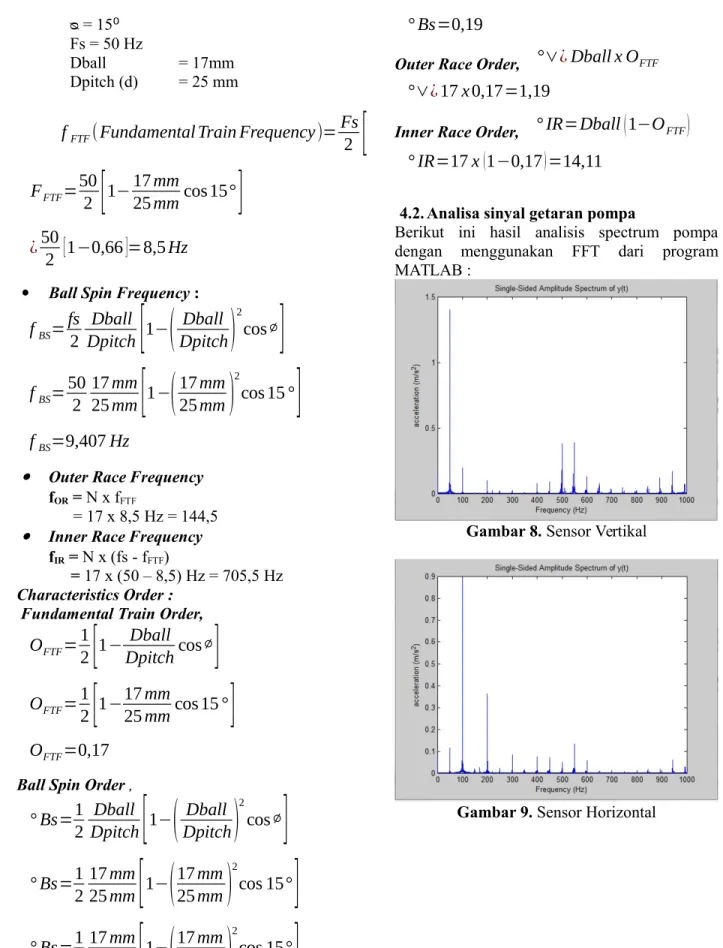
4.1. Perhitungan Frekuensi bearing Perhitungan frekuensi bearing pompa : Spesifikasi :
Merk Pompa : Panasonic
Tipe Bearing : Deep Groove Ball Bearings Single Row Tipe 6305
Ukuran :
d (Diameter Dalam) : 25 mm D (Diameter Luar) : 62 mm B (Diameter Ball) : 17 mm
Basic Load Ratings : Dynamid C (k N) : 23,4
Co : 11,6
Fatigue Load Ratings : Pu (k N) :0,49
Speed Ratings (Reference Speed) : 24000 r/min
N (Jumlah Bola): 9 Buah
= 15
ᴓ ⁰
Fs = 50 Hz
Dball = 17mm
Dpitch (d) = 25 mm
f
FTF(
Fundamental Train Frequency)=
Fs
2
[
1−
Dball
Dpitc h
cos ∅
]
F
FTF=
50
2
[
1−
17 mm
25 mm
cos 15°
]
¿
50
2
[
1−0,66
]
=
8,5 Hz
Ball Spin Frequency :
f
BS=
fs
2
Dball
Dpitch
[
1−
(
Dball
Dpitch)
2cos ∅
]
f
BS=
50
2
17 mm
25 mm
[
1−
(
17 mm
25 mm
)
2cos 15 °
]
f
BS=9,407 Hz
Outer Race Frequency fOR = N x fFTF
= 17 x 8,5 Hz = 144,5 Inner Race Frequency
fIR = N x (fs - fFTF)
= 17 x (50 – 8,5) Hz = 705,5 Hz Characteristics Order :
Fundamental Train Order,
O
FTF=
1
2
[
1−
Dball
Dpitch
cos∅
]
O
FTF=
1
2
[
1−
17 mm
25 mm
cos 15 °
]
O
FTF=0,17
Ball Spin Order ,
° Bs=
1
2
Dball
Dpitch
[
1−
(
Dball
Dpitch
)
2cos ∅
]
° Bs=
1
2
17 mm
25 mm
[
1−
(
17 mm
25 mm
)
2cos 15°
]
° Bs=
1
2
17 mm
25 mm
[
1−
(
17 mm
25 mm
)
2cos 15°
]
° Bs=0,19
Outer Race Order,
°∨
¿
Dball x O
FTF°∨¿17 x 0,17=1,19
Inner Race Order,
° IR=Dball
(
1−O
FTF)
° IR=17 x (1−0,17)=14,11
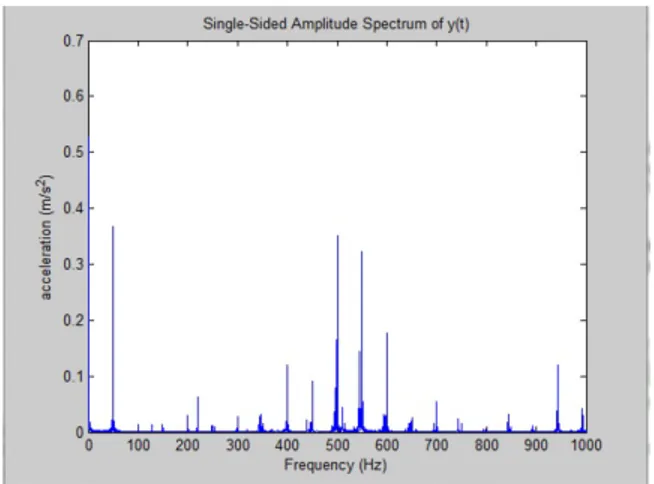
4.2. Analisa sinyal getaran pompa
Berikut ini hasil analisis spectrum pompa dengan menggunakan FFT dari program MATLAB :
Gambar 8. Sensor Vertikal
Gambar 10. Sensor Aksial
Berdasarkan hasil analisis spectrum pompa, tidak ditemukan peak pada frekuensi daerah inner dan outter race dari bearing. Sehingga dapat disimpulkan bahwa tidak terdapat kerusakan pada bagian dalam dan luar bearing. Sedangkan letak peak tertinggi terdapat pada 1 kali Rpm frekuensi dasar yaitu 50Hz pada sensor vertical dan sensor axial serta ditemukan pada 2 kali Rpm pada sensor Horizontal yang menunjukkan kerusakan pada impeller pompa, yaitu kemungkinan adanya pergeseran pusat perputaran massa impeller atau yang disebut dengan unbalanced.
V. Penutup
5.1. Kesimpulan
Adapun kesimpulan yang didapat dari percobaan pengukuran pompa sebagai predictive maintenance yaitu :
a. Pompa tidak mengalami kerusakan pada inner maupun outter bearing.
b. Pompa diprediksi mengalami kerusakan pada impeller yaitu berupa ketidakseimbangan impeller (unbalanced). 5.2. Saran
Adapun saran yang dapat diberikan penulis, yaitu dilakukan material treatment pada impeller agar massa pada setiap sudutnya sama.
DAFTAR PUSTAKA
Martianis, Erwin. 2012. Analisa Getaran pada Pompa Sentrifugal Sistem Penyambungan Kopling Sabuk untuk Monitoring Kondisi. Jurnal Dinamis, Vol. III, No. 10, Januari 2012.
Yudhistira, Yuda. 2014.
Mobley, R. Keith. 2002. An Introduction to Predictive Maintenance 2nd Edition. USA. Butterwooth-Heineman.