STUDI PERBANDINGAN KENDALI MOTOR
DC PID IDEAL DAN FUZZY SET POINT
MENGGUNAKAN LABVIEW
TUGAS AKHIR
Disusun Oleh:
NURUL HIKMAH
4211531019
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2017
STUDI PERBANDINGAN KENDALI MOTOR DC PID
IDEAL DAN FUZZY SET POINT MENGGUNAKAN
LABVIEW
TUGAS AKHIR
Disusun Oleh:
Nurul Hikmah
4211531019
Disusun untuk memenuhi salah satu syarat kelulusan Program Diploma IV Program Studi Teknik Mekatronika
Politeknik Negeri Batam
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2017
i PERNYATAAN KEASLIAN TUGAS AKHIR
Saya yang bertanda tangan dibawah ini menyatakan bahwa isi sebagian maupun keseluruhan Tugas Akhir saya yang berjudul: “STUDI PERBANDINGAN KENDALI MOTOR DC PID IDEAL DAN FUZZY SET POINT MENGGUNAKAN LABVIEW” adalah hasil karya sendiri, diselesaikan tanpa menggunakan bahan-bahan yang tidak diijinkan dan bukan merupakan karya pihak lain yang saya akui sebagai karya sendiri.
Semua referensi yang dikutip atau dirujuk telah ditulis secara lengkap pada daftar pustaka. Apabila ternyata pernyataan saya ini tidak benar, saya bersedia menerima sanksi sesuai peraturan yang berlaku.
Batam, 23 Desember 2016
Nurul Hikmah 4211531019
ii LEMBAR PENGESAHAN TUGAS AKHIR II
Tugas Akhir disusun untuk memenuhi salah satu syarat memperoleh gelar Sarjana Terapan Teknik (S. Tr. T)
di
Politeknik Negeri Batam Oleh Nurul Hikmah 4211531019 Tanggal Sidang: 1 Januari 2017 Disetujui Oleh : Dosen Penguji : 1. Iman Fahruzi, M. T NIP/NIK : 100007
2. Rifqi Amalya Fatekha NIP/NIK : 113107
Dosen Pembimbing :
1. Sumantri K.R, M. T NIP/NIK : 104030
iii
STUDI PERBANDINGAN KENDALI MOTOR DC PID IDEAL DAN FUZZY SET POINT MENGGUNAKAN LABVIEW
Nama Mahasiawa : Nurul Hikmah NIM : 4211531019
Pembimbing I : Sumantri K.R, MT. Pembimbing II : -
Email : [email protected]
ABSTRAK
Banyak hal yang mempengaruhi kecepatan motor DC, diantaranya pada saat diberi beban maka kecepatan motor akan melambat. Agar mendapatkan nilai kecepatan yang stabil pada saat diberi beban yang bervariasi sehingga kecepatan motor yang didapat stabil. Dengan merancang suatu kendali PID Ideal dan Fuzzy Set Point yang dapat mengendalikan perputaran kecepatan motor DC agar stabil. Pada sistem Kendali motor DC memerlukan user interface untuk membantu dalam memantau proses pengendalian kecepatan motor DC. Salah satu perangkat lunak yang dapat digunakan untuk membuat
interface adalah LabView. Dengan LabView dapat dibuat sistem pengendalian beserta user interface-nya. Setelah merancang Kendali PID Ideal pada motor DC, hasil keluaran
Kendali PID Ideal dibandingkan dengan hasil keluaran Fuzzy Set Point yang telah dirancang sebelumnya guna mengetahui kendali mana yang lebih stabil keluarannya.
Nilai Set Point yang digunakan untuk melakukan perbandingan pada Kendali PID Ideal dan Fuzzy Set Point ini adalah 2000, dengan KP pada PID sebesar 6000. Maka didapatlah hasil keluaran kecepatan motor DC tersebut, dengan waktu yang berbeda. Pada Kendali PID Ideal membutuhkan waktu yang lama untuk mencapai steady state, sedangkan Fuzzy
Set Point membutuhkan waktu yang cepat untuk mencapai steady state.
Berdasarkan pengujian yang telah dilakukan, dapat disimpulkan bahwa kedua kendali tersebut sama sama stabil akan tetapi waktu yang ditempuh untuk mendapatkan kecepatan stabil Kendali PID Ideal lebih lama dibandingkan Kendali Fuzzy Set Point.
iii
STUDY COMPARISON OF DC MOTOR CONTROL OF IDEAL PID AND FUZZY
SET POINT USING LABVIEW
Student Name : Nurul Hikmah Student ID : 4211531019
Advisor I : Sumantri K.R, MT. Advisor II : -
Email : [email protected]
ABSTRACT
Many things that affect the speed of DC motor, such as when given the load then the speed of the motor will be slow down. In order to get the value of a stable speed when given varies load so that the motor speed obtained stable. By designing a PID Ideal and Fuzzy Set Point Control that can Control the rotation of DC motor speed to be stable. On a DC motor Control system requires a user interface to assist in monitoring the DC motor speed Control process. One of the software that can be used to create interface is LabView. With LabView can be created Control system and its user interface. After designing a PID Ideal Control on a DC motor, the PID Ideal Control output is compared with the pre-designed Fuzzy Set Point output to determine which Control is more stable.
Set Point Value that be used to perform comparison on PID Control and Fuzzy Set Point is 2000, with KP at PID is 6000. So it is gotten the output result of speed of DC motor, with different time. On the PID Ideal Control takes a long time to reach steady state, while the Fuzzy Set Point takes a fast time to reach the steady state.
Based on the tests have be done, it can be concluded that both Controls are equally stable but the time taken to obtain stable speed PID Ideal Control is longer than the Fuzzy Set Point Control.
iv KATA PENGANTAR
Puji dan syukur penulis haturkan kepada Allah S.W.T, karena berkat rahmat-Nya penulis dapat menyelesaikan Laporan Tugas Akhir dengan judul Studi Perbandingan Kendali Motor DC PID Ideal dan Fuzzy Set Point Menggunakan Labview. Tak lupa shalawat beriring salam, penulis sampaikan kepada junjungan alam Nabi Muhammad S.A.W, karena berkat beliaulah kita dapat merasakan zaman saat ini yang penuh dengan ilmu pengetahuan dan teknologi
Penulisan Laporan Tugas Akhir ini dimaksudkan untuk melengkapi persyaratan kelulusan tingkat Diploma IV Program Studi Teknik Mekatronika Politeknik Negeri Batam. Untuk memenuhi persyaratan tersebut maka penulis mencoba untuk mengaplikasikan sebuah persamaan PID dan fuzzy yang diterapkan pada Labview untuk memberikan kontrol terhadap perputaran Motor DC.
Penulisan Laporan Tugas Akhir ini, dapat tersusun dan selesai dengan baik tak terlepas dari bantuan dan dukungan dari semua pihak yang ikut dalam membimbing penulis untuk menyelesaikan Laporan Tugas Akhir ini. Pada kesempatan ini, penulis ingin mengucapkan terima kasih kepada:
1. Allah S.W.T, atas anugerah yang telah diberikan kepada penulis. 2. Kedua orang tua dan keluarga atas jasa, do’a, bimbingan dan nasehat. 3. Bapak Dr. Priyono Eko Sanyoto, Selaku Direktur Politeknik Negeri Batam.
4. Bapak Sumantri Kurniawan Risandriya, ST., MT. Selaku Ka. Jurusan Teknik Elektro Politeknik Negeri Batam serta selaku dosen pembimbing Tugas Akhir. 5. Seluruh Dosen-dosen Teknik Elektro Politeknik Negeri Batam.
6. Seluruh teman-teman yang telah membantu atas terselesaikannya buku laporan ini. Semoga amal dan ibadah mereka yang telah diberikan kepada penulis diterima di sisi Allah S.W.T. penulis menyadari sepenuhnya, bahwa dalam penulisan Laporan Tugas Akhir ini masih banyak kesalahan dan kekurangan karena keterbatasan ilmu yang dimiliki oleh penulis, untuk itu kritik dan saran dari pembaca sangat diperlukan untuk penulis.
Batam, 30 Desember 2016
v DAFTAR ISI
PERNYATAAN KEASLIAN TUGAS AKHIR i
LEMBAR PENGESAHAN TUGAS AKHIR ii
ABSTRAK ABSTRACT iii iv KATA PENGANTAR v DAFTAR ISI vi
DAFTAR GAMBAR viii
DAFTAR TABEL ix
BAB I PENDAHULUAN 1
1.1 Latar Belakang Masalah 1
1.2 Perumusan Masalah 2
1.3 Batasan Masalah 2
1.4 Tujuan dan Manfaat 2
BAB II DASAR TEORI 3
2.1 Kontrol PID 3 2.2 Motor DC 3 2.3 LabView 4 2.3.1 Pengertian LabView 4 2.3.2 Tampilan Labview 4 2.3.3 PID LabView 6 2.4 NI USB 6008-6009 7 2.5 Rotary Encoder 7 2.6 EMS 30 A H-Bridge 7
BAB III PERANCANGAN SISTEM 9
3.1 Rancangan Penelitian 9
3.2 Rancangan Perangkat Keras (Hardware) 9
3.3 Rancangan Perangkat Lunak (Software) 10
3.4 Rancangan Mekanik 11
3.5 Instrument Penelitian 12
BAB IV HASIL DAN ANALISA 13
4.1 Pembacaan RPM pada Encoder 13
4.2 Pengujian Motor DC Menggunakan Kendali PID Ideal 13
4.2.1 Set Point 1500 Dengan KP 5000 15
4.2.2 Set Point 2000 Dengan KP 6000 15
4.2.3 Set Point 2000 Dengan KP 6000 16
4.3 Parameter Respon Transient Motor 16
4.4 Perbandingan Antara Respon Kendali PID dan Fuzzy Set Point 17
4.4.1 Kontrol PID Ideal 18
4.4.2 Kontrol Fuzzy Set Point 18
4.5 Menghitung Presentase Error 20
BAB V KESIMPULAN DAN SARAN 21
5.1 Kesimpulan 21
vi
DAFTAR PUSTAKA 22
LAMPIRAN A User Interface LabView 23
LAMPIRAN B Program LabView 24
LAMPIRAN C Datasheet NI USB 6008-6009 25
vii DAFTAR GAMBAR
Gambar 2.1 Batasan Kerja dari Motor DC 4
Gambar 2.2 Front Panel 5
Gambar 2.3 Blok Diagram 5
Gambar 2.4 Control Pallete 5
Gambar 2.5 Functions pallete 6
Gambar 2.6 Functions PID pallete 7
Gambar 2.7 NI USB-6008DAQ 8
Gambar 3.1 Blok diagram sistem kendali kecepatan motor 9
Gambar 3.2 Flowchart sistem kendali kecepatan motor DC 10
Gambar 3.3 Desain Mekanik 11
Gambar 4.1 Waktu yang Diperlukan Dalam Satu Perioda 14
Gambar 4.2 Kestabilan motor dengan settingpoint kecepatan 1500 dan Kp 5000 15 Gambar 4.3 Kestabilan motor dengan settingpoint kecepatan 2000 dan Kp 6000 15 Gambar 4.4 Kestabilan motor dengan settingpoint kecepatan 3000 dan Kp 6000 16 Gambar 4.5 Grafik Perbandingan PID Ideal dan Fuzzy Set Point dengan SP 2000 17
Gambar 4.6 Grafik Kontrol PID Ideal 18
Gambar 4.7 Grafik Kontrol Fuzzy Set Point 18
viii DAFTAR TABEL
Tabel 2.1 Alokasi Pin Interface Header J 8
Tabel 4.1 Hasil Pembacaan Encoder 13
Tabel 4.2 Parameter respon transient motor dengan sistem kendali PID Ideal 16 Tabel 4.3 Presentase Error Antara Control PID dan Fuzzy Set Point 20
ii BAB I
PENDAHULUAN 1.1 LATAR BELAKANG
Motor DC merupakan aktuator yang sangat lazim untuk digunakan. Banyak sistem kendali yang telah diaplikasikan untuk mengatur kecepatan motor DC. Beberapa penelitian telah dilakukan untuk memecahkan masalah dalam pengaturan kecepatan motor DC diantaranya: pengendalian kecepatan motor DC dengan PD-logika fuzzy terhadap pengereman berbasis mikrokontroller (Ridwan, 2013). Dan Sistem Kendali hybrid PID-logika fuzzy pada pengaturan kecepatan motor DC (H. Syamsul Bahri, 2004).
Banyak hal yang mempengaruhi kecepatan motor DC, diantaranya pada saat diberi beban maka kecepatan motor akan melambat.
Dengan adanya permasalahan di atas, solusi yang akan Penulis buat yaitu dengan merancang suatu kendali yang dapat mengendalikan perputaran kecepatan motor DC agar stabil. Pada sistem kendali motor DC memerlukan user interface untuk membantu manusia dalam memantau proses pengendalian kecepatan motor DC. Salah satu perangkat lunak yang dapat digunakan untuk membuat user interface adalah LabView. Dengan LabView dapat dibuat sistem pengendalian beserta user interface-nya. Kendali tersebut berupa “Studi Perbandingan Kendali Motor DC PID Ideal dan Fuzzy Set Point Menggunakan LabView” sehingga diharapkan akan mendapat suatu hasil kecepatan yang lebih optimal. 1.2 Perumusan Masalah
Berdasarkan latar belakang masalah, penelitian dilakukan untuk memecahkan beberapa masalah yaitu:
1. Bagaimana mengendalikan motor DC agar adaptif tanpa banyak perhitungan matematis. 2. Menentukan konstanta PID yang tepat sesuai dengan plant yang digunakan.
3. Menganalisa perbandingn PID Ideal dengan Fuzzy Set Point.
4. Desain dan implementasi modul-modul program yang mencakup kebutuhan dalam penelitian yang dilakukan.
1.3 Batasan Masalah
Berdasarkan uraian latar belakang dan perumusan masalah diatas, diperlukan batasan masalah penelitian sebagai berikut:
1. Motor yang dikendalikan adalah motor dengan tegangan 12Vdc yang berjenis motor DC bersikat/brushed motor DC
2. Penulis tidak membahas serta menganalisa kontruksi rangkaian daya maupun analisis perhitungannya
3. Penulis tidak membahas secara detail bagaimana konstruksi di hardware dibuat maupun konstruksi softwarenya. Semua hardware maupun software yang dibuat hanya bersifat membantu proses dalam meneliti membangun sistem kendali kecepatan motor DC
4. Sistem kendali PID menggunakan tools PID yang terdapat pada software LabVIEW
1.4 Tujuan dan Manfaat
Tujuan yang diharapkan dari tugas akhir ini adalah:
Memecahkan masalah pengendalian motor DC dengan pengendalian PID dan melakukan analisa hasil pengendalian dari perbandingan PID Ideal dan fuzzy Set point.
Adapun manfaat yang dapat diambil kendali motor DC menggunakan PID Ideal dan studi perbndingan Fuzzy Set Point pada Labview antara lain:
1. Mengontrol motor DC menjadi lebih stabil.
2. Mengetahui perbedaan antara PID Ideal dan Fuzzy Set Point berdasarkan kestabilan kecepatan.
3. Menguji PID Ideal pada motor DC
BAB II DASAR TEORI 2.1 Kontrol PID
Struktur Kontrol PID Ideal atau strategi kontrol PID ideal secara praktis dikenal juga dengan istilah struktur PID Parallel atau struktur PID noninteracting. Struktur ideal ini pada dasarnya adalah struktur yang umum dijumpai pada buku-buku Teks Kontrol. Algoritma kontrol untuk PID jenis ini diperlihatkan pada persamaan berikut:
……….(1) Seperti terlihat pada persamaan (1) diatas, untuk struktur PID ideal ini ada tiga buah parameter kontrol yang dapat diatur secara bebas (independen), masing-masing: Kp (gain proporsional), Ti (waktu integral), dan Td (waktu derivative).
Untuk tujuan yang lebih praktis, persamaan (1) tersebut umum juga ditulis dalam bentuk seperti terlihat pada persamaan (2) dibawah:
………..(2) dengan dalam hal ini Ki dan Kd berturut-turut dikenal dengan istilah gain integral dan gain derivative.
Walaupun secara teoritis nilai-nilai parameter kontrol PID ideal tersebut besarnya dapat diatur secara independen, tetapi secara praktis (terutama terkait dengan model proses yang akan dikontrol), untuk menghasilkan unjuk kerja sistem kontrol yang diharapkan, pengaturan atau tuning yang dilakukan terhadap salah satu parameter umumnya memerlukan pengaturan ulang pada parameter yang lain. Sebagai contoh, untuk sebuah proses tertentu, Pengubahan nilai Kp (diperbesar atau diperkecil) umumnya memerlukan setting ulang pada besaran parameter kontrol yang lainnya, yaitu Ki (Ti) dan Kd (Td).
2.2 Motor DC
Motor DC bekerja berdasarkan prinsip gaya elektromagnetik sehingga apabila motor tersebut diberi catu daya, arus akan mengalir ke dalam motor kemudian menghasilkan torsi putar yang sebanding dengan arus tersebut.
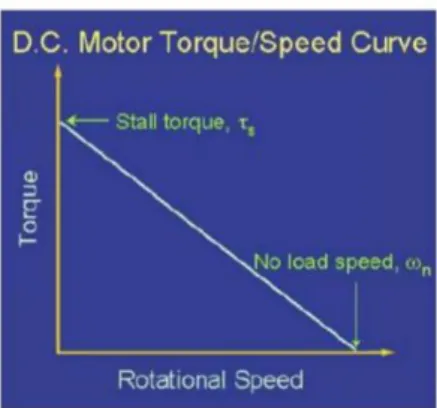
Karakteristik yang dimiliki suatu motor DC dapat digambarkan melalui kurva daya dan kurva torsi/kecepatannya, dari kurva tersebut dapat dianalisa batasan- batasan kerja dari motor serta daerah kerja optimum dari motor tersebut.
Gambar 2.1 Batasan Kerja dari Motor DC
Dari grafik diatas terlihat hubungan antara torsi dan kecepatan untuk suatu motor dc tertentu. Dari grafik terlihat bahwa torsi berbanding terbalik dengan kecepatan putaran, dengan kata lain terdapat tradeoff antara besar torsi yang dihasilkan motor dengan kecepatan putaran motor. Dua karakteristik penting terlihat dari grafik yaitu:
a. Stall torque menunjukan titik pada grafik dimana torsi maksimum, tetapi tidak ada
putaran pada motor.
b. No load speed menunjukan titik pada grafik dimana terjadi kecepatan putaran
maksimum, tetapi tidak ada beban pada motor. 2.3 LabView
2.3.1 Pengertian LabView
LabVIEW singkatan dari Laboratory Virtual Instrumentation Engineering
Workbench, adalah perangkat lunak computer untuk pemrosesan dan visualisasi
data dalam bidang akuisisi data, kendali instrumentasi serta automasi industri yang pertama kali dikembangkan oleh perusahaan National Instruments pada tahun 1986.
2.3.2 Tampilan LabView
Tampilan sederhana labVIEW terdiri dari tiga jendela yaitu: a. Front Panel
Front panel adalah bagian window yang berlatar belakang abu-abu
serta mengandung control dan indikator. Front panel digunakan untuk membangun sebuah VI (virtual instrument), menjalankan program dan mendebug program.
Gambar 2.2 Front Panel
b. Blok diagram
Blok diagram adalah bagian window yang berlatar belakang putih berisi source code yang dibuat dan berfungsi sebagai instruksi untuk front
panel.
Tampilan dari blok diagram dapat lihat pada Gambar 2.3.
Gambar 2.3 Blok Diagram
c. Control dan Function Pallete
Control Pallete merupakan tempat beberapa control dan indikator
pada front panel, control pallete hanya tersedia di front panel, untuk menampilkan control pallete dapat dilakukan dengan mengkilk windows >>
show control pallete atau klik kanan pada front panel. Contoh control
pallete ditunjukkan pada Gambar 2.4.
Functions Pallete di gunakan untuk membangun sebuah blok
diagram, functions pallete hanya tersedia pada blok diagram, untuk menampilkannya dapat dilakukan dengan mengklik windows >> show
control pallete atau klik kanan pada lembar kerja blok diagram. Contoh dari
functions pallete ditunjukkan pada Gambar 2.5.
Gambar 2.5 Functions pallete
2.3.3 PID LabView
Palet LabVIEW FRC PID terdiri dari empat VI: 1. PID
PID adalah suatu algoritma yang digunakan dalam umpan balik kontrol untuk mengatur proses seperti gerakan motor atau aliran melalui katup. Menggunakan kontrol PID akan membuat desain robot lebih stabil, kuat, dan memiliki potensi untuk meningkatkan karakteristik respon.
2. PID Set point Profil
Set point Profil VI untuk menghasilkan profil set point. Profiling set point
dapat berguna ketika sistem yang mengendalikan kebutuhan melalui serangkaian keadaan. Contoh, lengan robot yang perlu untuk menyelesaikan urutan yang tepat dari bergerak untuk mengambil dan menempatkan objek. PID Profil dapat digunakan profiling set point untuk menentukan urutan gerakan PID Set point. 3. PID Kontrol Masukan Filter
Input Filter VI menerapkan low-pass filter dan dapat digunakan untuk menyaring frekuensi tinggi suara dari proses variabel sinyal. Noise pada proses variabel dapat mengakibatkan fluktuasi yang tidak diinginkan dalam output PID. 4. PID Lead-Lag
PID Lead-Lag VI menggunakan algoritma posisi yang mendekati eksponensial Lead/lag. Kontrol Lead-Lag sering digunakan dalam skema kontrol
umpan-maju sebagai kompensator dinamis. Ini adalah kontras dengan algoritma PID, yang digunakan dalam sistem umpan balik.
Gambar 2.6 Functions PID pallete
2.4 NI USB 6008-6009
National Instrument USB 6008 adalah perangkat keras yang menyediakan dasar data aquisisi (DAQ) yang berfungsi untuk pengaplikasian data logging, pengukuran yang praktis dan untuk media pembelajaran.
Gambar 2.7 NI USB-6008DAQ
2.5 Rotary Encoder
Rotary encoder adalah device elektromekanik yang dapat memonitor gerakan dan
posisi. Rotary encoder umumnya menggunakan sensor optik untuk menghasilkan serial pulsa yang dapat diartikan menjadi gerakan, posisi, dan arah. Sehingga posisi sudut suatu poros benda berputar dapat diolah menjadi informasi berupa kode digital oleh rotary
encoder untuk diteruskan oleh rangkaian kendali.
2.6 EMS 30 A H-Bridge
EMS 30 A H-Bridge merupakan H-Bridge berbasis VNH3SP30 yang didesain untuk
menghasilkan 2 arah dengan arus continue sampai dengan 30 A pada tegangan 5,5 Volt sampai 36 Volt (IC VNH2SP30 hanya sampai 16 V). Modul ini dilengkapi dengan rangkaian sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini mampu men-drive beban-beban induktif seperti misalnya relay, solenoida, motor DC, motor stepper, dan berbagai macam beban lainnya.
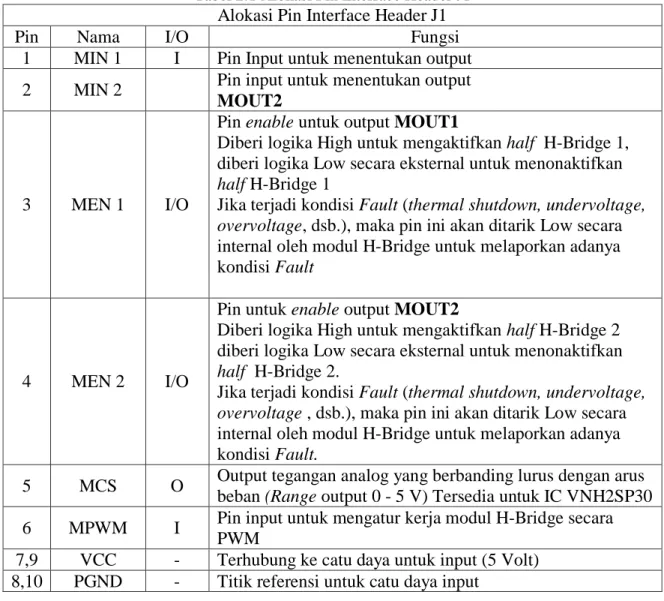
Tabel 2.1 Alokasi Pin Interface Header J1
Alokasi Pin Interface Header J1
Pin Nama I/O Fungsi
1 MIN 1 I Pin Input untuk menentukan output 2 MIN 2 Pin input untuk menentukan output
MOUT2
3 MEN 1 I/O
Pin enable untuk output MOUT1
Diberi logika High untuk mengaktifkan half H-Bridge 1, diberi logika Low secara eksternal untuk menonaktifkan
half H-Bridge 1
Jika terjadi kondisi Fault (thermal shutdown, undervoltage,
overvoltage, dsb.), maka pin ini akan ditarik Low secara
internal oleh modul H-Bridge untuk melaporkan adanya kondisi Fault
4 MEN 2 I/O
Pin untuk enable output MOUT2
Diberi logika High untuk mengaktifkan half H-Bridge 2 diberi logika Low secara eksternal untuk menonaktifkan
half H-Bridge 2.
Jika terjadi kondisi Fault (thermal shutdown, undervoltage,
overvoltage , dsb.), maka pin ini akan ditarik Low secara
internal oleh modul H-Bridge untuk melaporkan adanya kondisi Fault.
5 MCS O Output tegangan analog yang berbanding lurus dengan arus beban (Range output 0 - 5 V) Tersedia untuk IC VNH2SP30 6 MPWM I Pin input untuk mengatur kerja modul H-Bridge secara
PWM
7,9 VCC - Terhubung ke catu daya untuk input (5 Volt) 8,10 PGND - Titik referensi untuk catu daya input
BAB III
PERANCANGAN SISTEM
3.1 Rancangan Penelitian
Penelitian yang akan dilakukan yaitu rancang bangun sistem kendali kecepatan motor DC dengan menggunakan metode PID Labview memiliki tahapan penelitian sebagai
berikut:
1. Pembuatan program pada Labview 2. Pembuatan mekanik.
3. Pembuatan dan perakitan rangkaian sensor encoder.
4. Pengujian perangkat lunak sensor encoder dan NI USB 6008.
5. Pengujian Motor DC dengan menggunakan program yang sudah dibuat dan sensor encoder.
6. Analisa data kecepatan motor DC dengan nilai set point pada PID Labview. 7. Penulisan tugas akhir.
3.2 Rancangan Perangkat Keras (Hardware)
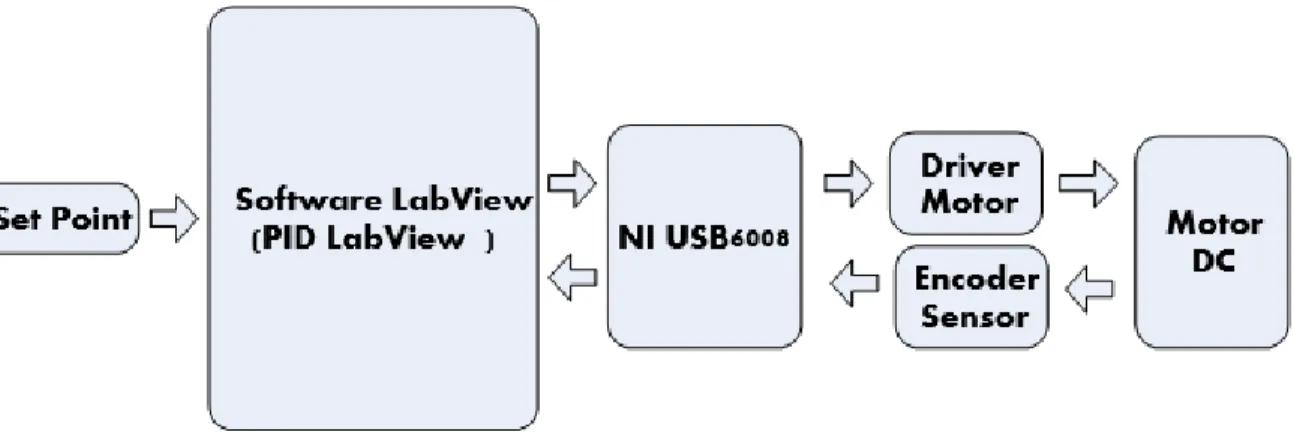
Gambar 3.1 Blok diagram sistem kendali kecepatan motor DC
Berdasarkan dari gambar blok diagram diatas digunakan beberapa perangkat keras yang berguna untuk mendukung proses kerja alat agar berjalan sesuai yang diinginkan. Salah satunya adalah dengan menggunakan PID pada labview yang digunakan sebagai pengontrol dari sistem alat yang akan dibuat. PID pada labview digunakan untuk memproses hasil data yang masuk dari input set point yang kemudian hasilnya akan digunakan sebagai input pada NI USB 6008. NI USB disini berguna sebagai pengolah data yang masuk dari PC yang kemudian data akan diubah dalam bentuk tegangan sehingga dapat menggerakan actuator yaitu motor DC. Apabila motor DC sudah bergerak maka
kecepatnnya akan terbaca oleh sensor encoder dan hasil data kecepatan encoder tersebut akan menjadi inputan kembali bagi NI USB 6008 yang kemudian akan menjadi pembanding apakah kecepatan yang dibaca oleh sensor encoder sama dengan set point yang diberikan di dalam labview. Jika data kecepatan yang dibaca sensor encoder kurang dari set point atau lebih dari set point yang diberikan, maka labview akan me-looping data kembali dan dikeluarkan output dalam bentuk tegangan sehingga data kecepatan yang dihasilkan sama dengan set point yang diberikan. Sehingga dengan software labview kita dapat melihat keluaran kecepatan dari motor.
3.3 Rancangan Perangkat Lunak (Software)
START INPUT SETPOINT PID LABVIEW NI USB 6008 MOTOR DC SENSOR ENCODER COMPARE PID BETWEEN FUZZY SETPOINT END
Gambar 3.2 Flowchart sistem kendali kecepatan motor DC
Langkah pertama yang dilakukan pada sistem ini adalah memasukan nilai setting
point atau nilai awal. Selanjutnya saat motor bergerak akan menimbulkan suatu error
antara nilai set point dengan nilai yang dikeluarkan oleh motor. Sensor encoder yang ada pada motor berfungsi untuk membandingkan antara nilai set point dengan nilai yang dihasilkan motor. Sehingga nilai yang diterima sensor encoder kemudian akan dikirim ke PID yang ada pada labview. Setelah mendapat nilai PID-nya maka nilai tersebut kemudian akan masuk pada NI USB 6008 yang kemudian akan dikonversikan menjadi nilai tegangan yang kemudian akan dialirkan kemotor sehingga motor akan berputar stabil sesuai dengan nilai set point.
Data yang sudah diproses melalui LABVIEW dan NI USB 6008 akan dilihat kestabilannya dalam bentuk sinyal. Sinyal yang keluar dalam grafik akan langsung terdeteksi kestabilannya jika motor dalam kondisi diam maupun bergerak. Jika keluaran sinyal memiliki sedikit ripple maka alat tersebut sudah cukup stabil, tetapi jika memiliki
ripple yang banyak maka kestabilan alat masih belum stabil. Selanjutnya membandingkan
hasil pembacaan pada PID Ideal dengan Fuzzy Set Point guna mengetahui kendali mana yang dapat mengendalikan kecepatan motor lebih stabil.
3.4 Rancangan Mekanik
Gambar 3.3 Desain Mekanik
Dari gambar diatas dapat diketahui bahwa perancangan mekanik memiliki tiga komponen utama yaitu input, NI USB 6008, motor DC, encoder sensor. Komponen input berisikan plug tegangan dari power supply. NI USB 6008 merupakan sarana komunikasi
dari Labview ke motor DC dan sebaliknya. Motor DC yang digunakan adalah motor DC 12 Vdc.
3.5 Instrument Penelitian
Dalam melakukan penelitian ini alat pengujian yang digunakan untuk pengujian alat dan sebagai referensi keberhasilan dari alat yang dibuat adalah sebagai berikut:
Multimeter
Multimeter digunakan untuk mengukur nilai tegangan, arus pada rangkaian control dan nilai tegangan output dari motor.
Tacho meter
Tacho meter digunakan sebagi reverensi nilai encoder yang dibaca sensor dengan nilai
BAB IV
HASIL DAN ANALISA 4.1 Pembacaan RPM pada Encoder
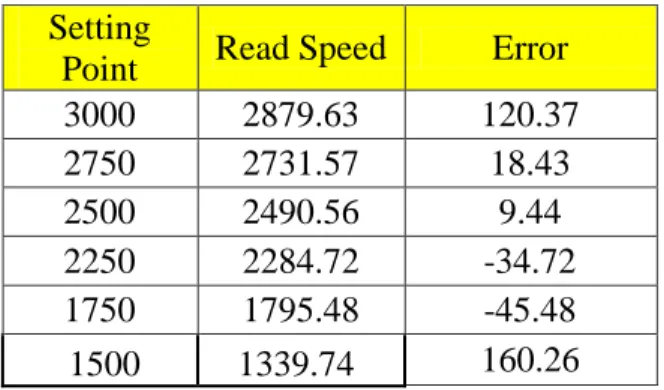
Tabel 4.1 Hasil Pembacaan Encoder
Setting
Point Read Speed Error
3000 2879.63 120.37 2750 2731.57 18.43 2500 2490.56 9.44 2250 2284.72 -34.72 1750 1795.48 -45.48 1500 1339.74 160.26
Pembacaan nilai encoder merupakan hasil dari nilai putaran yang dihasilkan motor. Dimana dari putaran yang dihasilkan oleh motor kemudian akan dikonversikan menjadi bentuk rpm. Dalam alat ini encoder berfungsi sebagai feedback dari motor DC yang kemudian menjadi nilai input dari PID Ideal. Sedangkan nilai Error didapat dari hasil pengurangan antara Setting Point dan Read Spead.
4.2 Pengujian Motor DC Menggunakan Kendali PID Ideal
Dari hasil percobaan, didapatkan sebuah grafik kestabilan yang mencapai setting
point, dimana digunakan metode PID Ideal sebagai pengontrolnya semakin kecil nilai error
maka nilai rpm yang didapat semakin stabil.
Untuk menentukan nilai Kp, Ti, dan Td digunakanlah teori Ziegler Nichlos yang berdasarkan pada karakeristik tanggapan dari motor yang diberikan. Dengan menetukan nilai Kcr sendiri maka perhitungan nya adalah:
Diketahui Kcr = 500, maka
………..……….………(1)
Selanjutnya untuk mencari nilai Ti adalah sebagai berikut.
……….(2) Pct: waktu yang diperlukan dalam satu prioda
Gambar 4.1Waktu yang Diperlukan Dalam Satu Perioda
Sehingga,
Selanjutnya untuk mencari nilai Td adalah sebagai berikut.
……….(3)
Nilai Kp, Ti, dan Td yangtelah didapat dapat diimplementasikan pada setting PID pada LabView. Dikarenakan motor yang digunakan sama maka nilai Kp dapat kita set sendiri dan nilai Ti dan Td tetap.
4.2.1 Set Point 1500 Dengan KP 5000
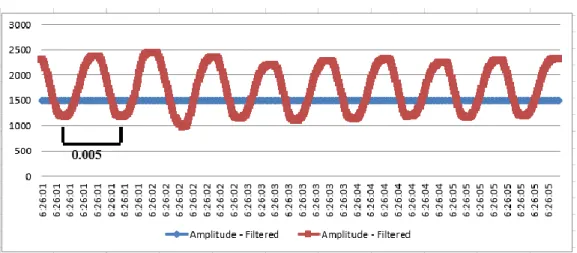
Gambar 4.2 Kestabilan motor dengan settingpoint kecepatan 1500 dan Kp 5000
Dari hasil gambar transient diatas dapat diamati bahwa garis berwarna putih merupakan set point sedangkan yang berwarna merah adalah output pengendalian. Waktu yang dicapai untuk menyamakan nilai set point pada percobaan diatas sangat lama, sehingga output rpm tidak dapat berjalan secara stabil.
4.2.2 Set Point 2000 dengan KP 6000
Gambar 4.3 Kestabilan motor dengan settingpoint kecepatan 2000 dengan Kp 6000
Dari gambar diatas pada kecepatan 2000 dengan mengunakan Kp 6000 ini menghasilkan waktu yang lebih cepat dibandingkan dengan menggunakan Kp 5000 untuk mencapai nilai set point. Karena error yang dihasilkan tidak terlalu tinggi. Sehingga waktu rise time tidak lama.
4.2.3 Set Point 3000 dengan KP 6000
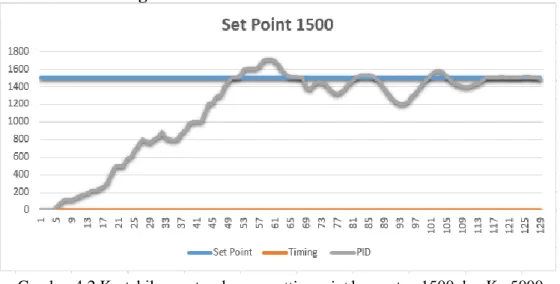
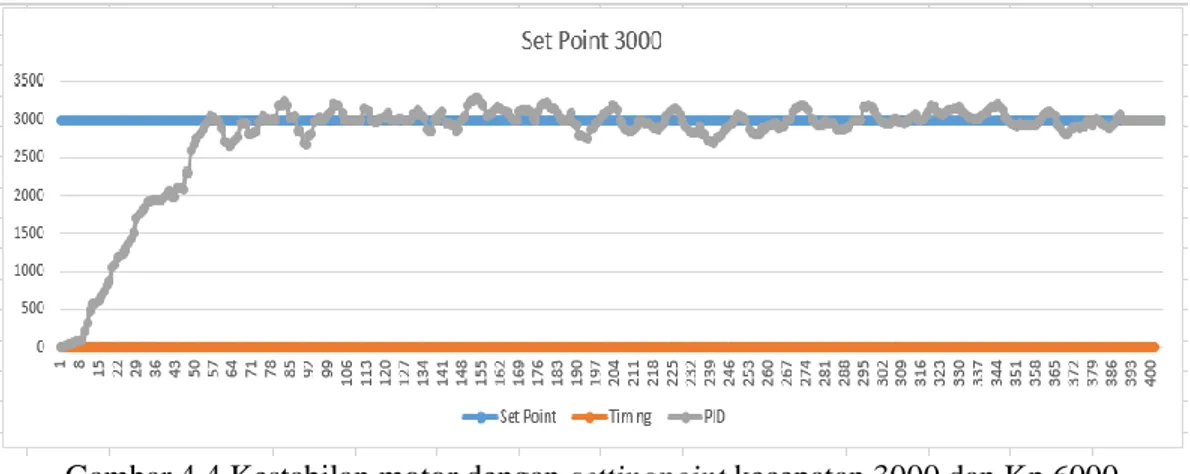
Gambar 4.4 Kestabilan motor dengan settingpoint kecepatan 3000 dan Kp 6000
Dari gambar diatas pada kecepatan 3000 dengan mengunakan Kp 6000 ini menghasilkan waktu yang cepat untuk mencapai nilai set point sama seperti set point 2500. Sehingga error yang dihasilkan tidak tinggi. Sehingga waktu yang diperlukan untuk rise time tidak lama.
4.3 Parameter Respon Transient Motor
Dari data pengujian hasil kestabilan motor dapat diamati respon transient motor untuk setiap referensi. Data parameter respon transient dari hasil pengamatan adalah sebagai berikut.
Tabel 4.2 Parameter respon transient motor dengan sistem kendali PID Ideal
Kecepatan Tr Td Tp Mp Ts
3000 0.3 0.1 0.38 50 0.1
2000 0.3 0.12 0.3 340 0.2
1500 0.5 0.2 0.7 36.24 0.1
Dari tabel 4.2 diatas kita akan mengetahui bahwa respon transient berpengaruh pada waktu dalam mencapai nilai set point, nilai tersebut didapat dari berbagai spesifikasi renspon transient, diantaranya:
a. Rise Time (Tr)
Adalah waktu yang dibutuhkan oleh output untuk bergerak dari 0% sampai 100% terhadap kondisi set point.
b. Delay Time (Td)
Merupakan waktu yang dibutuhkan output untuk mencapai 50% dari kondisi set
point.
0 500 1000 1500 2000 2500 3000 1 1 :1 1 .5 1 1 :1 1 .5 11 :1 1. 6 1 1 :1 1 .6 1 1 :1 1 .7 1 1 :1 1 .7 1 1 :1 1 .8 1 1 :1 1 .8 1 1 :1 1 .9 1 1 :1 1 .9 1 1 :1 2 .0 1 1 :1 2 .0 1 1 :1 2 .1 1 1 :1 2 .1 1 1 :1 2 .2 1 1 :1 2 .2 1 1 :1 2 .3 1 1 :1 2 .3 1 1 :1 2 .4 1 1 :1 2 .5 1 1 :1 2 .5 11 :1 2. 6 1 1 :1 2 .6 1 1 :1 2 .7 1 1 :1 2 .7 1 1 :1 2 .8
Set Poin 2000
Set Point PID Fuzzy Set Point
Merupakan waktu yang dibutuhkan oleh output dalam mencapai nilai maksimum.
d. Maksimum Overshoot (Mp)
Adalah tinggi maksimum yang melebihi nilai set point.
e. Settling Time (Ts)
Adalah waktu yang dibutuhkan oleh output untuk mencapai kondisi set point dengan toleransi yang diberikan.
4.4 Perbandingan Antara Respon Kendali PID Ideal dan Fuzzy Set Point
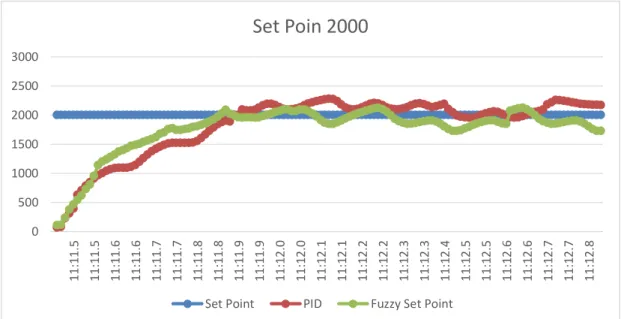
Gambar 4.5 Grafik Perbandingan PID Ideal dan Fuzzy Set Point dengan SP 2000
Ideal PID di-tuned secara manual ke Propotional gain KP = 6000, Integral time Ti = 0.0025 dan Derivative time Td = 0.000625. Sedangkan Fuzzy Set Point akan menghitung sendiri parameter PID berdasarkan kondisi error (E) dan perubahan error (ΔE). Hasilnya, response yang diberikan Fuzzy Set Point sedikit lebih bagus dan stabil dibandingkan dengan PID Ideal.
4.4.1 Kontrol PID Ideal
Gambar 4.6 Grafik Kontrol PID Ideal
Dari gambar grafik di atas dapat dilihat bahwa, pada set point 2000, dengan menggunakan kontrol PID Ideal waktu yang didapat untuk mencapai titik puncak/maximum (Tp) adalah 0.3. Nilai kecepatan yang melebihi set point (Mp) adalah 340 rpm. Waktu yang diperlukan untuk bergerak dari titik 0 ke titik set point (Tr) adalah 0.3. Waktu yang dibutuhkan output untuk mencapai 50% dari kondisi
set point (Td) adalah 0.12. Toleransi yang diberikan untuk mencapai output yang
stabil dari grafik diatas adalah ± 0.2.
4.4.2 Kontrol Fuzzy Set Point
Dari gambar grafik di atas dapat dilihat bahwa, dengan menggunakan kontrol Fuzzy Set point 1500 waktu yang didapat untuk mencapai titik puncak/maximum (Tp) adalah 0.2. Nilai kecepatan yang melebihi set point (Mp) adalah 41 rpm. Waktu yang diperlukan untuk bergerak dari titik 0 ke titik set point (Tr) adalah 0.2. Waktu yang dibutuhkan output untuk mencapai 50% dari kondisi set point (Td) adalah 0.1. Toleransi yang diberikan untuk mencapai output yang stabil dari grafik diatas adalah ± 0.1.
Dari perbandingan grafik diatas dapat disimpulkan bahwa untuk mendapatkan kecepatan yang stabil terhadap set point maka kendali yang tepat digunakkan adalah Fuzzy Set Point. Dimana waktu yang diperlukan untuk mencapai kecepatan stabil relativ cepat dibanding dengan PID Ideal.
4.5 Menghitung Presentase Error
Tabel 4.3 Presentase Error Antara Control PID dan Fuzzy Set Point
Set Poin PID Fuzzy Set Point 2000.00 1931.14 1985.99 2000.00 1940.86 1999.67 2000.00 1998.04 2000.00 2000.00 2000.02 2000.02 2000.00 2016.69 2000.01 2000.00 2015.71 2000.00 2000.00 2015.88 2000.07 2000.00 2013.32 2000.52 2000.00 2013.05 2000.73 2000.00 2011.98 2004.58 2000.00 2011.85 2004.46 2000.00 2010.76 2004.02 2000.00 2008.67 2002.23 2000.00 2008.97 2000.19 2000.00 2005.18 2000.13 2000.00 2005.13 2000.04 2000.00 2001.02 2000.00 2000.00 2000.00 1999.64 2000.00 2000.00 2000.06 2000.00 2000.11 2000.00 2000.00 2000.10 2000.00 2000.00 2000.00 2000.00 2000.00 1997.49 2000.03 2000.00 2000.01 2000.00 2000.00 2000.00 2000.00 2000.00 2000.00 2000.00 2000.00 2000.00 2000.00 Average 2000.22 2000.09 Error 1.1% 0.4%
BAB V
KESIMPULAN DAN SARAN 5.1 Kesimpulan
Setelah dilakukan pengujian dan analisa maka dapat disimpulkan sebagai berikut : 1. Dengan system PID Ideal control motor stabil
2. Setelah dibandingkan antara PID Ideal dengan Fuzzy Set Point, pengendalian motor DC yang paling stabil ialah menggunakan pengendalian Fuzzy Set Point.
3. Sistem memiliki tingkat persentase error 1.5% 5.2 Saran
Untuk penelitian lebih lanjut kedepannya perlu ditambahkan beberapa saran sebagai berikut ini :
1. Perlu dibuatnya sistem plan yang lengkap agar dapat menguji kehandalan dari sistem kendali PID Ideal dan Fuzzy Set point.
2. Perlu adanya sistem yang mampu memperkecil tingkat persentase error. 3. Perlu adanya tempat untuk pembuatan TA.
DAFTAR PUSTAKA
[1] Bahri, H. Syamsul. “Sistem Kendali hybrid PID-logika fuzzy pada pengaturan kecepatan motor DC.” DIII Teknik Elektronika, Politeknik Negeri Batam, Batam, 2004.
[2] Firdaus, Ahmad Riyad. Dosen Politeknik Negeri Batam, Topic: “Sistem Kendali Kecepatan Motor DC.” Batam, 2010
[3] Sani, Ridwan. “Pengendalian Kecepatan Motor DC dengan PD-Logika Fuzzy Terhadap Pengereman Berbasis Mikrokontroller.” DIV Teknik Mekatronika, Politeknik Negeri Batam, Batam, 2013.
[4] Kefin F. “[FRC 2015] PID Tutorial.” Internet:
https://decibel.ni.com/content/docs/DOC-26317, January 2, 20135*[24 Mei 2016]
[5] http://www.ni.com/pdf/manuals/371303n.pdf [24 Mei 2016]
[6] http://www.innovativeelectronics.com/innovative electronics/download_files/manual/
Lampiran A
Lampiran B Program LabView