30 A. Aziz Achmad
Laboratorium Mekanika Benda Padat Jurusan Teknik Mesin FTI – ITS Abstrak
Suspensi merupakan komponen yang penting dalam memberikan kendaraan. Kehadiran suspensi semiaktif diharapkan dapat meningkatkan kenyamanan kendaraan bila dibandingkan dengan menggunakan suspensi pasif.
Penelitian terhadap suspensi semiaktif banyak dilakukan baik dengan simulasi maupun dengan uji lapangan. Dengan menggunakan model ½ kendaraan dan lima derajad kebebasan dilakukan penelitian terhadap respon dari suspensi semiaktif secara analitis dan simulatif dengan bantuan software MATLAB. Besarnya gaya redaman dikendalikan dengan menggunakan pengontrol logika fuzzy dengan scaling factor error [Sfe] 2,5; scaling factor delta error [Sfde] 2,5; dan gain variable damper [Gvd] 225.
Dari analisa dan simulasi bila dibandingkan dengan suspensi pasif didapat hasil sebagai berikut:
• Terjadi penurunan amplitudo percepatan vertikal kursi penumpang, amplitudo percepatan vertikal kendaraan dan amplitudo percepatan pitching sebesar 19% sampai dengan 31,8% untuk profil jalan sinusoidal, dan 25,63% sampai dengan 30,6% untuk profil jalan bump. • Terjadi penurunan defleksi suspensi dan amplitudo defleksi ban 19,28% sampai dengan
26,67% untuk profil jalan sinusoidal dan 19,49% sampai dengan 29,03% untuk profil jalan bump.
Sehingga dapat disimpulkan bahwa secara analitis dan simulatif, suspensi semiaktif dapat meningkatkan kenyamanan dibandingkan penggunaan suspensi pasif.
Kata kunci: suspensi semiaktif, amplitudo percepatan vertikal, amplitudo percepatan pitching, defleksi suspensi, amplitudo defleksi ban.
Kendaraan sebagai alat transportasi merupakan kebutuhan yang sangat penting pada masa kini. Untuk memenuhinya bermunculan produsen otomotif dengan berbagai jenis produknya. Semakin berkembangnya ilmu pengetahuan dan teknologi, masyarakat semakin selektif dalam memilih kendaraan sebagai alat transportasi sedang produsen juga selalu berupaya meningkatkan kualitas produksinya agar dapat memenuhi keinginan konsumen selain dapat mampu bersaing di pasaran.
Salah satu pertimbangan dalam memilih kendaraan adalah kenyamanan. Komponen utama pada kendaraan yang berpengaruh terhadap kenyamanan adalah suspensi yang terdiri dari pegas dan peredam. Suspensi pasif tidak dapat mengendalikan kenyamanan kendaraan pada profil jalan yang berbeda,
sedang suspensi semiaktif diharapkan dapat meningkatkan kenyamanan dengan mengatur besarnya konstanta redaman.
Dengan menggunakan model ½ kendaraan dan lima derajad kebebasan serta bantuan bahasa pemrograman MATLAB akan dapat disimpulkan bahwa dibanding dengan suspensi pasif, secara analitis dan simulatif suspensi semiaktif telah mennigkatkan kenyamanan kendaraan.
Kenyamanan
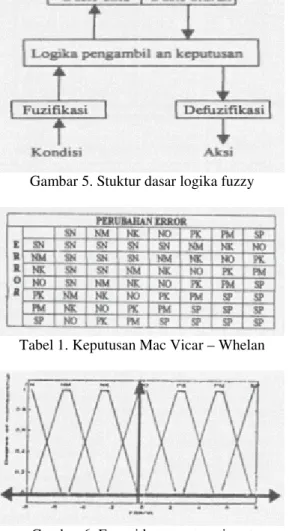
Respon manusia terhadap getaran meliputi beberapa faktor internal, yakni: umur, tinggi badan, posisi dan lain-lain. Serta faktor eksternal, seperti: frekuensi, amplitudo, waktu dan arah getaran. Standar kenyamanan yang dipergunakan adalah standar international ISO 2631. Standar ini memberikan nilai batas
Gambar 1. Batas percepatan vertikal ISO 2631 Model Kendaraan dan Sistem Kontrol Model ½ kendaraan
Kendaraan dimodelkan sebagai sistem ½ kendaraan dengan 5 derajad kebebasan (5DOF) seperti tampak pada Gambar 2.
Kendaraan yang dianalisa diasumsikan melaju lurus dengan kecepatan tetap pada jalur datar. Sumber gangguan berasal dari
ketidakrataan permukaan jalan dengan profil sinusoidal, bump, dan random. Sifat kekakuan ban lebih dominan daripada sifat redamannya. Dalam hal redaman ban diabaikan.
Persamaan Gerak Sistem
Persamaan gerak sistem dirumuskan sebagai berikut:
[ ]
M{ }
U&& +[
C+Vd]
{ }
U& +[ ]
K{ }
U =F(t)Dimana matrik massanya:
= 5 4 3 1 5 4 3 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 U U U U M M M I M M & & & & & & & & & & θ Matrik kekakuannya:
Matriks Gaya Eksitasi karena profil jalan
Persamaan Ruang Keadaan
Persamaan ruang keadaan dalam bentuk matrik adalah sebagai berikut:
Dimana:
Gambar 2. Model ½ kendaraan dengan 5 derajad kebebasan
Dimana:
m3 =Massa roda depan dan assesoris m4 =Massa roda belakang dan assesoris m5 =Massa penumpang
m1 =Massa badan kendaraan I =Momen Inersia ( pitch ) badan
kendaraan
k1 =Kekakuan pegas depan k2 =Kekakuan pegas belakang k3 =Kekakuan pegas ban depan k4 =Kekakuan pegas ban belakang k5 =Kekakuan pegas kursi penumpang cl = Konstanta redaman shock absorbser
depan
c2 = Konstanta redaman shock absorbser belakang
L1 = Jarak poros depan ke pusat massa L2 = Jarak poros belakang ke pusat massa L = Jarak kursi penumpang ke pusat
massa
V adalah kecepatan laju kendaraan, td
adalah perbedaan waktu antara ban depan dan belakang. Dimana Vd1, Vd2 adalah sinyal
kontrol untuk variabel damper, nilai dari keduanya harus berada diantara range yang ditentukan:
Vdmin < Vd1, Vd2 < Vdmaks
Persamaan ruang keadaan diatas dapat ditulis kembali dalam bentuk matrik dengan hubungan masing-masing variabel sebagai berikut:
Kontrol Logika Fuzzi
Diagram blok kontrol suspensi pasif dan suspensi semiaktif ditunjukkan oleh Gambar 3 dan Gambar 4.
Gambar 3. Diagram blok suspensi pasif
Gambar 4. Diagram blok KLF pada suspensi Semi-Aktif kendaraan
Dimana:
y(t): keluaran sistem berupa kecepatan relatif kendaraan
w(t): masukan sistem berupa profil permukaan jalan
u(t): sinyal kendali kontroler berupa gaya redam dari variable damper
e : error
de : perubahan error sp : set point
Struktur dasar kontrol logika fuzzy dapat dilihat pada Gambar 5.
overlapping 25%.
Sedangkan keluaran berupa sinyal kontrol mempunyai fungsi keanggotaan dengan range (0,1) dengan overlapping 25% tampak pada Gambar 6 dan 7.
Gambar 5. Stuktur dasar logika fuzzy
Tabel 1. Keputusan Mac Vicar – Whelan
Gambar 6. Fungsi keanggotaan input
Gambar 7. Fungsi keanggotaan sinyal kontrol Logika pengambilan keputusan untuk menentukan kebutuhan output sinyal kontrol berdasarkan basis data dan basis aturan, menggunakan aturan operasi mini madani.
Defuzzifikasi pada penelitian ini menggunakan metode defuzzifikasi center of area (COA) dengan menggunakan persamaan dibawah ini:
Dimana:
Ui = Sinyal kontrol KLF berupa data
Crisp
Μci(w) = Keluaran dari keanggotaan aksi
kontrol ke-i
Wi = Nilai tengah variabel linguistik
bentuk trapesium Analisa dan Simulasi
Spesifikasi kendaraan
Pengujian dilakukan dengan simulasi komputer terhadap kendaraan dengan spesifikasi yang diambil dari Jurnal Alexande Hac, Iljoong Youn, Hsien H. Chen “Control of Suspension for Vehicle with Flexible Bodies Part II Semi-active Suspension”, Hyunday Motor Company, Gyunggi, Republic of Korea (Tabel 2).
Tabel 2. Spesifikasi Kendaraan [3] Profil permukaan jalan
Sebagai eksitasi dipilih dua macam profil permukaan jalan, yaitu:
a. Sinusoidal dengan amplitudo 0,1 m seperti tampak pada Gambar 8.
b. Bump dengan persamaan:
Zo(t) = 0,05 sin ωt untuk to < t < to+0,5T Zo(t) = 0 untuk harga t yang lain
Profil jalan bump dapat dilihat pada Gambar 9.
Gambar 8. Profil jalan sinusoidal
Gambar 9. Profiljalan bump
Respon sistem dari hasil simulasi
Respon dari sistem yang akan dianalisa meliputi: percepatan vertikal kendaraan, percepatan vertikal kursi penumpang, percepatan pitching, defleksi suspensi depan dan belakang serta defleksi ban depan dan belakang.
Gambar 10. Defleksi pegas belakang
Gambar 11. Roadholding roda depan
Gambar 12. Roadholding roda belakang Dari grafik-grafik diatas tampak bahwa penggunaan suspensi semi-aktif dapat mereduksi percepatan kursi penumpang hingga 19,05%, percepatan vertikal kendaraan 31,8%, percepatan pitching 24,9%, defleksi suspensi
Gambar 13. Percepatan vertikal bodi kendaraan
Gambar 14. Percepatan vertikal kursi penumpang
Gambar 15. Percepatan pitching kendaraan Respon sistem pada permukaan jalan sinusoidal dengan frekuensi 1 rad/det
Gambar 16. Percepatan vertikal bodi kendaraan
Gambar 17. Percepatan kursi penumpang
Gambar 18. Percepatan pitching kendaraan
Gambar 19. Defleksi pegas depan
Gambar 21. Roadholding roda depan
Gambar 22. Roadholding roda belakang Dari grafik-grafik diatas tampak bahwa percepatan vertikal kendaraan, percepatan vertikal kursi penumpang, percepatan pitching, defleksi suspensi depan dan belakang, serta defleksi ban depan dan belakang pada mulanya lebih besar tetapi segera turun dan lebih kecil, dibandingkan dengan suspensi pasif. Setting time suspensi semi-aktif lebih kecil dibanding suspensi pasif.
Respon sistem pada permukaan jalan sinusoidal dengan frekuensi 5 rad/det
Gambar 23. Percepatan vertikal bodi kendaraan
Gambar 24. Percepatan kursi penumpang
Gambar 25. Percepatan pitching kendaraan
Gambar 26. Defleksi pegas depan
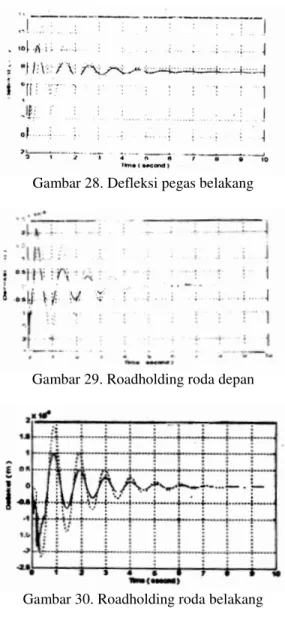
Gambar 28. Defleksi pegas belakang
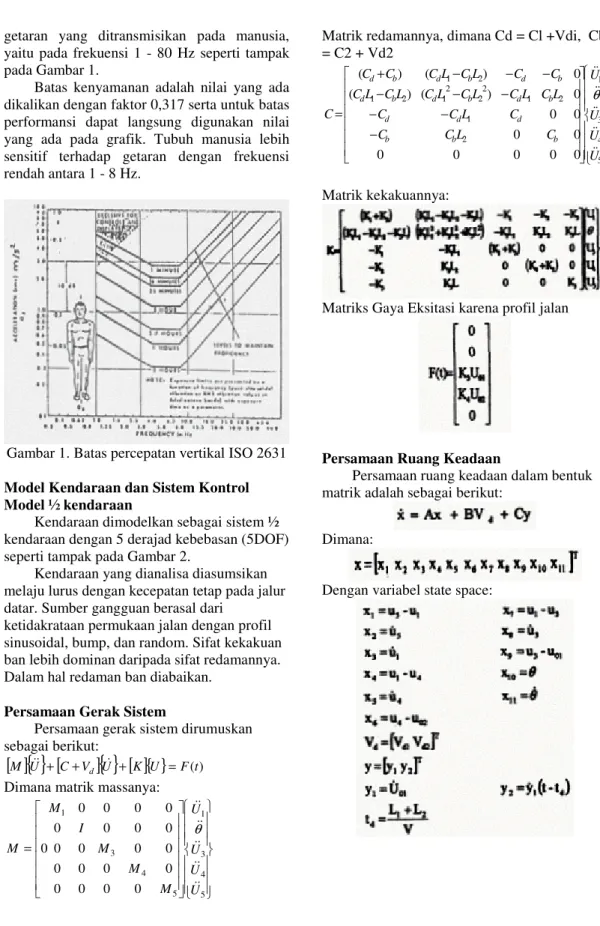
Gambar 29. Roadholding roda depan
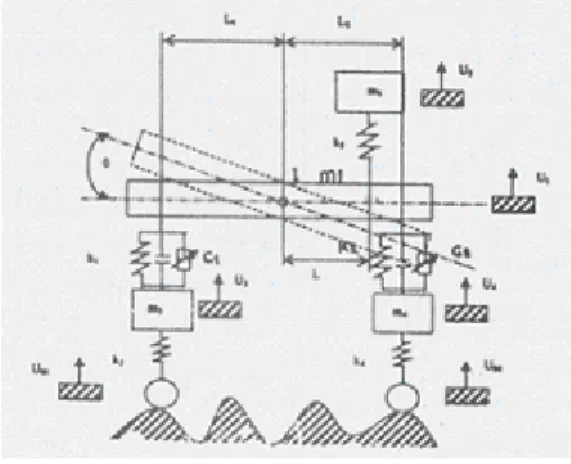
Gambar 30. Roadholding roda belakang Dari grafik-grafik diatas tampak bahwa penggunaan suspensi semi-aktif dapat
mereduksi percepatan kursi penumpang hingga 26,77%, percepatan vertikal kendaraan 30,61%, percepatan pitching 25,63%, defleksi suspensi depan 19,49%, defleksi suspensi belakang 25%, defleksi ban depan 28,5% dan defleksi ban belakang 29,03% dibanding bila menggunakan suspensi pasif.
Kesimpulan
Dari hasil simulasi dan analisa penerapan kontroler logika fuzzy, berhasil meningkatkan unjuk kerja sistem suspensi semi-aktif dalam mengatasi ketidakteraturan profil permukaan jalan sebagai berikut:
pitching sebesar 19% sampai dengan 31,8%. Sedang defleksi suspensi dan ban sebesar 19,28% sampai dengan 26,67% bila dibandingkan dengan penggunaan suspensi pasif.
[3] Pada permukaan jalan bump, penggunaan suspensi semi-aktif dapat mereduksi percepatan vertikal kursi penumpang, percepatan vertikal kendaraan, dan percepatan pitching sebesar 25,63% sampai dengan 30,6%. Sedang defleksi suspensi dan ban sebesar 19,49% sampai dengan 29,03% bila dibandingkan dengan penggunaan suspensi pasif.
Referensi
[4] Bansing, Nyoman, 1997, “Active Suspension Controller Design by Optimal Regulator Approach”, The Ninth International Pacific Conference on Automotive Engineering, Bali.
[5] Ekawati, Estiyani, 1997, “The design of Nonlinier Semi-aktive Suspension Control System on A Quarter car Using Dissipative Methods”, The Ninth International Pacific Conference on Automotive Engineering, Bali.
[6] Hac, A. Young, I., 1992, “ Optimal Semiaktive Suspension with Preview Based on A Quarter Car Model”, Journal of Vibration and Accoustic Transaction of ASME, Vol. 11e4,.
[7] Harris, C. M., Crede, C. E., 1976. Shock and Vibration Handbook, McGraw Hill Book Company, USA.
[8] Inman, Daniel J.,1993, Engineering Vibration, Prentice - Hall Inc., New Jersey [9] Karnopp, D., 1990, Design Principle for
Vibration Control Using Semi-active Danipers, Journal of Dynamic System, Measurement and Control Transactions of ASME, Vol. 112.
[10] Kibong Park Seung-Jin Heo, 1997, “Design and Tesy of Semi-active Suspension Control Alogarithms Using Hardware-in-the-Loop Simulations”, The Ninth lnternational Pacific Conference on Automotive engineering, Bali.
[11] Martinus, D., 1997, “A Semi-active Suspension System Design Using Optimal Control on A Hatf Vehicle Model”, The Ninth International Pacific Conference on Automotive engineering, Bali.
[12] Ogata, Katsuhiko, 1994, Teknik Kontrol Automatik, Penerbit Erlangga, Jakarta, [13] Shahian, B., Hassul, M., 1993, Control
System Design Using Matlab, PrenticeHall Inc., New Jersey.
[14] Sutjiatmo, Bambang, 1989, ”Pengembangan Metode Domain Waktu untuk Analisa Getaran Acak Kendaraan”, Tesis, Institut Teknologi Bandung.
[15] Vierck, R. K., 1979, Vibration Analysis, Harper and Row, New York.
[16] Wong, Jo Yung, 1978, Theory of Ground Vehicle, John Willey & Sons, USA [17] Woo, 1997. “A New Double Sky-Hook
Algorithm for Improving Road-Holding Property in Semi-active Suspension Systems”, The Ninth International Pacific Conference on Automotive engineering, Bali.
[18] Yan, J., Ryan, M., Power, J., 1994, Using Fuzzy Logic, Prentice-Hall Inc., New Jersey, USA.
[19] Yoshihiro Atsumi Hiroyuki Shinjyo, 1997, “Truck Riding Comfort Improved by Semi-active controlled Cab Suspension”, The Ninth International Pacific Conference on Automotive engineering, Bali.
![Tabel 2. Spesifikasi Kendaraan [3]](https://thumb-ap.123doks.com/thumbv2/123dok/4666332.3422301/5.774.86.372.103.458/tabel-spesifikasi-kendaraan.webp)