PERANCANGAN PENGENDALI POSISI LINIER UNTUK
MOTOR DC DENGAN MENGGUNAKAN PID
Endra
1; Nazar Nazwan
2; Dwi Baskoro
3; Filian Demi Kusumah
4 1Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas Bina Nusantara Jalan K.H. Syahdan No 9, Palmerah, Jakarta Barat 11480
ABSTRACT
This research creates a PID (Proportional, Integral, Derivative) controlling system. It includes linier position of DC motor with microcontroller. The methodology in this research is experiment through hardware and software designing. The expected result is in each set point (expected point) acquires optimal Kp, Ki, and Kd mark to reach a good report system. The good report system means to have small point of error or close to the expected set point and a quick response time. To 15 cm set point with mark Kp = 850, Ki = 7, Kd = 8000 errors as -0,1 in 0.33s response time. For 40 cm set point in with mark Kp = 2000, Ki = 80, Kd = 8000, acquires errors as -0,6 in 1.21s response time. For 75 cm set point, the mark is Kp = 12000, Ki = 100, Kd = 30000, acquires errors 0.2 in 1,94s response time.
Keywords: PID (Proportional, Integral, Derivative) Controller position, microcontroller, DC
motor, error, response time.
ABSTRAK
Pada penelitian ini dibuat sistem pengaturan PID (Proportional, Integral, Derivative) posisi linier motor DC dengan mikrokontroller. Metode penelitian yang digunakan dari penelitian ini, ialah menggunakan eksprimen dengan melakukan perancangan hardware maupun software. Hasil penelitian yang dicapai, ialah untuk setiap masing - masing set point (posisi yang diinginkan) didapat nilai Kp, Ki, dan Kd optimal untuk mencapai respon sistem yang baik. Respon sistem yang baik berarti mempunyai error yang kecil atau mendekati nilai set point yang diinginkan dan waktu respon yang cepat. Untuk set point 15 cm dengan nilai Kp = 850 , Ki = 7 , Kd = 8000 error sebesar -0.1 dengan waktu respon 0.33s. Untuk set point 40 cm dengan nilai Kp = 2000, Ki = 80, Kd = 8000, didapat error sebesar -0.6 dengan waktu respon 1.21s. Untuk set point 75 cm yaitu nilai Kp = 12000, Ki = 100, Kd =30000 didapat error sebesar 0.2 dengan waktu respon 1.94s.
Kata kunci: Pengaturan PID (Proportional, Integral, Derivative) posisi, mikrokontroller, motor
PENDAHULUAN
Dalam dunia industri penggunaan motor DC diaplikasikan untuk sistem kontrol posisi yang memerlukan daya poros yang cukup besar sehingga sangat banyak digunakan. Dalam mengatasi sesuatu masalah, sangatlah baik bila masalah tersebut dapat terselesaikan dengan sebuah cara yang sederhana namun tepat pada penggunaanya. Oleh karena itu sangatlah bermanfaat bila mempelajari sebuah sistem control, karena pada penggunaan yang sebenarnya tidak hanya terpaku dalam dunia perangkat keras dan yang lainnya dalam sistem pengaturan. Dengan adanya teknologi yang berkembang pesat saat ini, sangatlah membantu untuk membuat sistem control yang dapat membantu manusia dalam mengatasi sebuah permasalahan. Untuk dapat mengimplementasikan sistem control tersebut secara digital, haruslah memahami dahulu dasar-dasar dari sistem control,
karena hal ini sangatlah mambantu dalam mengimplementasikannya ke dalam dunia perindustrian. Untuk itu perlu dibuat sebuah kontroller yang bertugas untuk menjaga kecepatan motor sehingga sesuai dengan kecepatan yang diinginkan.
Dalam penelitian ini, pengontrolan yang digunakan yaitu PID. Kontroler PID merupakan gabungan dari pengendali Proportional, Integral dan Differensial. Unsur Proportional, Integral dan Differensial masing masing berfungsi untuk mempercepat reaksi sistem, menghilangkan offset
dan mendapatkan energi tambahan pada awal perubahan beban. Jadi dengan kontroller ini hasil akhir atau jarak dapat dihasilkan sesuai dengan keinginan. Pada penelitian ini, digunakan mikrokontroller sebagai sistem pengaturan posisi motor DC. Mikrokontroller merupakan komponen elektronika digital yang dapat menerima data dari sejumlah saluran input, memproses dan mengeluarkan data.
PEMBAHASAN
Pengontrolan Kontroller Proportional Dengan Integral Dengan Derivative (PID)
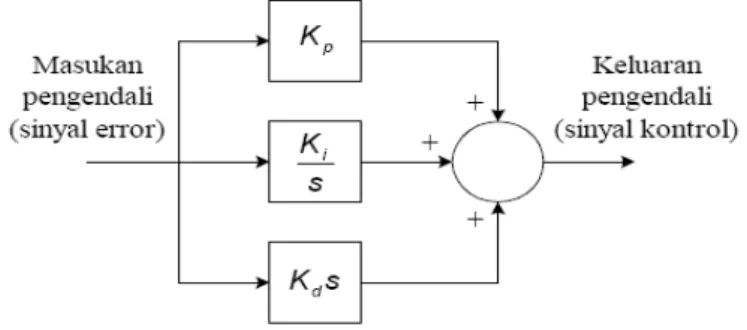
Penggabungan dari Kontroler Proportional (P) dengan Kontroler Integral (I) dan Kontroller Diferensial (D) maka akan menjadi kontroller PID . Setiap kekurangan dan kelebihan dari masing-masing kontroller P, I, dan D dapat saling menutupi dengan menggabungkan ketiganya secara pararel. Elemen-elemen kontroller P, I, dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar.Gambar 1 Blok diagram controller PID
Karakteristik kontroller PID sangat dipengaruhi oleh kontribusi besar dari ketiga parameter P, I, dan D. Parameter kontroller PID selalu didasari atas tinjauan terhadap karakteristik yang
diatur (plant). Kontroller bekerja sebagai penggerak plant dan mengontrol sifat plant. Yang dikontrol oleh sistem PID adalah output sistem. Agar diperoleh output yang sesuai maka sistem PID akan memanipulasi nilai input. Nilai yang dimanipulasi merupakan hasil komputasi dari nilai
input, feedback dan sinyal error. Sinyal error ini dihasilkan oleh output yang dibawa dalam komponen feedback untuk dikirim ke kontroler PID sehingga dapat dijadikan pengukuran error output. Dari nilai manipulasi inilah, diperoleh output yang sesuai dengan error yang minimum.
Persamaan output dari kontroler PID adalah:
∫
+ + = t 0 ) ( ) ( Ki e(t) Kp u(t) dt t de Kd dt t e ………. Persamaan (1) Dengan:Kp = Konstanta penguatan Proportional
Ki = Konstanta penguatan Integral
Kd = Konstanta penguatan Derivative
Perancangan Sistem
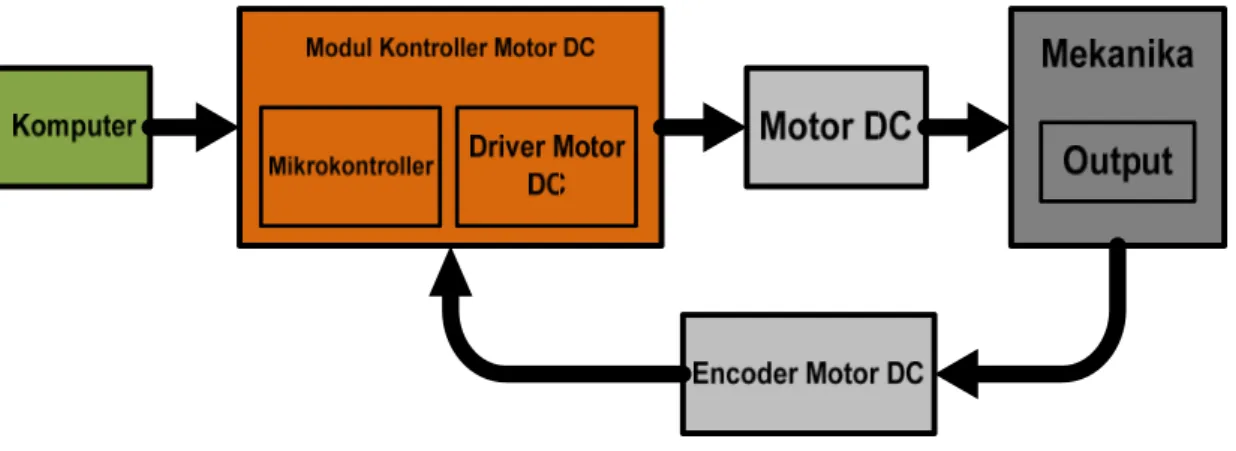
Perancangan sistem pengendalian posisi linier motor DC dengan algoritma PID berbasiskan mikrokontroler ini mempunyai modul utama untuk pengendalian motor DC dan modul mekanik. Perancangan sistem ini merupakan sistem pengendali single input dan single output di mana nilai set point sebagai inputan dan putaran motor sebagai output-nya. Perancangan awal dari sistem yang akan dibangun ini adalah algoritma PID yang dipakai sepenuhnya berdasarkan implementasi dari sebuah algoritma matematika yang dituangkan ke dalam bahasa pemograman mikrokontroler. Mikrokontroller merupakan pusat pemrosesan data.
Dalam modul, driver akan menerima sinyal input yang dikirim dari mikrokontroler berupa
clock dan arah pergerakan. Modul driver ini akan mengirim sinyal ke motor DC yang akan menggerakkan axis. Encoder dari motor DC menjadi feedback untuk mikrokontroller dalam pengaturan perputaran motor DC dan akan terlihat output set point akan sama dengan nilai input set point dengan pengukuran secara manual. Ouput pergerakan benda di dalam modul mekanik dari titik awal sampai titik akhir atau sesuai dengan jarak input.
Gambar 2 Diagram Blok Sistem
Kontroller ini dapat bekerja dengan motor DC yang memiliki encoder dengan resolusi tinggi. Untuk masalah daya, kontroller ini dapat di sesuaikan dalam mengontrol motor DC dengan daya sampai 1 kW. Kontroller ini juga mempunyai pembatas arus (current limiter) sehingga arus maksimum dapat dibatasi yang mengalir pada motor DC, dengan begitu motor DC akan terlindung dari kelebihan arus. Jika terjadi kesalahan, misalnya ketika waktu motor DC bergerak, maka akan
ada feedback ke sistem dan sistem akan berhenti. Dengan ini sistem tidak rusak atau tetap stabil dan khususnya motor DC tidak dipaksakan dan tidak timbul kerusakan. Dalam kontroller ini algoritma PID dapat digunakan.
Gambar 3 Tampilan Motor DC dan sistem Mekanik
Gambar 4 Tampilan Modul kontroller Motor DC dan Modul Power Supply
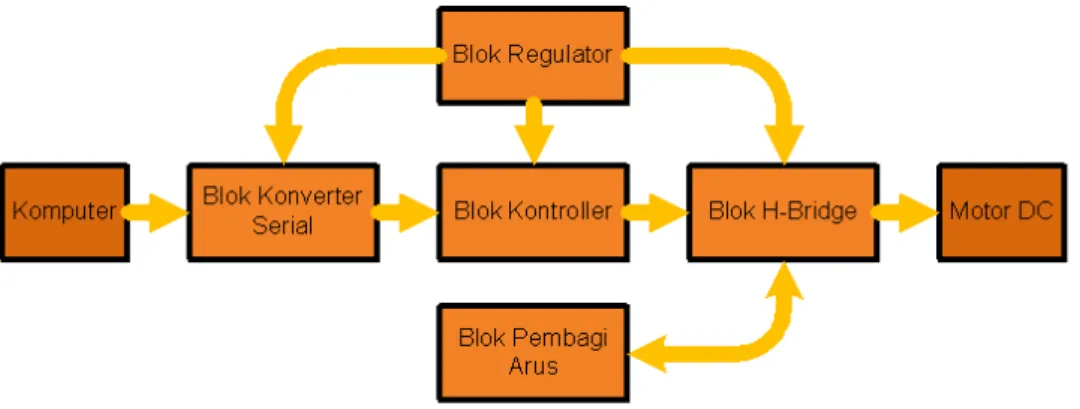
Dalam modul kontroller ini terdapat bagian-bagian, yang setiap bagian mempunyai fungsi yaitu:
Gambar 5 Diagram Blok Modul Kontroller Motor DC
Blok regulator berguna untuk mengonversi dari tegangan 12 volt menjadi 5 volt. Tegangan 5 volt ini akan digunakan sebagai tegangan supply (Vcc) untuk IC halfbridge (IR2184) yang memicu mosfet. Tegangan yang dikonversi ini juga menjadi tegangan suply buat mikrokontroller dan juga IC TTL yang ada.
Komputer mengirim data dengan menggunakan USB to serial yang terhubung ke blok
converter serial di modul controller. Dalam blok serial converter ini terdapat IC MAX232 yang berguna sebagai level converter untuk melakukan konversi dua arah antara serial port dari PC (RS232) dan serial port dari mikrokontroler.
Setelah itu dilanjutkan ke blok controller. Dalam blok controller ini terdapat mikrokontroller. Attiny 2313 digunakan sebagai kontroller digital untuk mengendalikan motor DC dengan waktu yang cepat dan dengan kesalahan yang sangat kecil. Algoritma PID akan diprogram di AVR ini dan algoritma ini juga yang mengatur PWM yang berguna untuk mengatur perputaran motor. Kontroller ini berbentuk closed loop sistem dengan adanya feedback kecepatan dan posisi oleh encoder motor sampai mencapai posisi yang diinginkan atau set point yang diberikan oleh
user. Di blok ini terdapat IC flip-flop yang berguna untuk mengaktifkan IC halfbridge IR 2184 dalam blok H-bridge.
Blok H-bridge ini berfungsi sebagai penggerak (driver) untuk motor DC. Terdiri dari dua IC halfbridge (IR2184) yang berguna sebagai trigger mosfet (pemicu mosfet). Empat buah mosfet
(IRFP260) yang terdapat pada blok ini berguna sebagai saklar aliran arus yang menuju motor DC. Dalam blok ini terdapat resistor dengan daya 5 watt. Resistor juga berguna menentukan tegangan di blok ini sesuai dengan arus maksimum motor DC. IC IR2184 untuk memilih mosfet mana yang harus aktif pada saat putaran motor DC searah jarum jam (CW) atau berlawanan jarum jam (CCW). IC IR2184 yang atas men-trigger mosfet T1 dan T4, sedangkan IC IR2184 yang bawah
men-trigger mosfet T2 dan T3. Mosfet yang harus aktif antara T1 dan T4 atau T2 dan T3. Jika yang aktif T1 dan T3 atau T2 dan T4 yang aktif maka sistem akan rusak.
Blok H-bridge ini terhubung dengan blok pembagi arus. Dalam blok ini terdapat OP-AMP (TL082) yang berguna sebagai komparator untuk membandingkan arus yang mengalir di motor DC dengan tegangan yang di-set di trimpot. Blok ini bekerja setelah IC halfbridge (IR2184) di blok H-bridge telah men-triggermosfet yang ada untuk menjalankan motor DC. Oleh karena itu, blok ini berguna untuk membatasi arus maksimum yang boleh mengalir pada motor DC, dengan begitu motor DC akan terlindung dari kelebihan arus. Jika motor DC kelebihan arus, maka IC op-amp yang ada di blok akan memberi sinyal kepada IC halbridge untuk berhenti men-trigger mosfet,
sehingga motor DC berhenti berputar. Ini yang dapat menyebabkan sistem tetap stabil dan terhindar dari kerusakan sistem.
Evaluasi Sistem
Untuk Encoder motor DC tidak bisa dipastikan bahwa untuk satu putaran mempunyai resolusi 1024 (sesuai spesifikasi Motor DC). Maka dari itu, untuk menentukan jumlah pulse untuk 1 cm dilakukan percobaan. Motor berputar dengan jumlah pulse 1000 lalu dilakukan pengukuran. Tetapi, setelah dilakukan secara berulang-ulang dengan nilai pulse yang sama, hasil dari pengukuran menghasilkan jarak yang berubah-ubah. Oleh karena itu, dari hasil pengukuran diambil besar jarak rata-rata yang dihasilkan yaitu untuk 1000 pulse jarak yang dihasilkan 15 cm. Setelah itu dilakukan perhitungan untuk mencari jumlah pulse untuk 1 cm yaitu 1000 dibagi dengan 15 dan didapat hasil 66,66666667. Nilai 66 diambil untuk 1 cm.
Gambar 6 Grafik untuk Encoder Resolution
Untuk mendapatkan jarak yang diinginkan dibutuhkan konstanta encoder dan jumlah pulse encoder, seperti persamaan dibawah ini:
N . K S = …….. persamaan (2) Dengan :
N
K
S
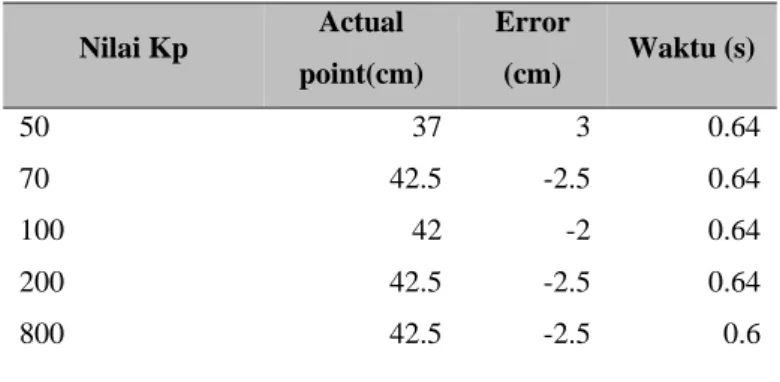
Tabel 1 Hasil Percobaan untuk mencari nilai Kp Untuk set Point 40 cm
Nilai Kp Actual point(cm) Error (cm) Waktu (s) 50 37 3 0.64 70 42.5 -2.5 0.64 100 42 -2 0.64 200 42.5 -2.5 0.64 800 42.5 -2.5 0.6
=
Jarak (cm)=
Konstanta Encoder (cm/pulse)850 42 -2 0.6
1000 42.1 -2.1 0.58
5000 42.5 -2.5 0.52
10000 42.5 -2.5 0.45
20000 42.8 -2.8 0.41
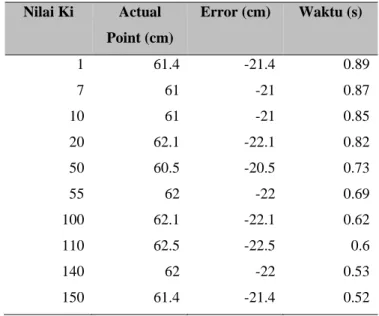
Tabel 2 Hasil Percobaan untuk mencari nilai Ki Untuk Set Point 40 cm
Nilai Ki Actual Point (cm) Error (cm) Waktu (s) 1 61.4 -21.4 0.89 7 61 -21 0.87 10 61 -21 0.85 20 62.1 -22.1 0.82 50 60.5 -20.5 0.73 55 62 -22 0.69 100 62.1 -22.1 0.62 110 62.5 -22.5 0.6 140 62 -22 0.53 150 61.4 -21.4 0.52
Tabel 3 Hasil Percobaan untuk mencari nilai Kd Untuk Set Point 40 cm
Nilai Kd Actual Point
(cm) Error (cm) Waktu (s) 100 42.5 -2.5 0.83 500 41.8 -1.8 0.95 1000 42.7 -2.7 1.29 2000 41 -1 1.2 5000 40.9 -0.9 1.27 8000 40.6 -0.6 1.21 10000 42.3 -2.3 1.38 20000 41 -1 1.35 50000 41.5 -1.5 1.45 60000 41.9 -1.9 1.39
Dari percobaan, Ketika nilai Kp terlalu kecil maka menghasilkan error yang sangat besar seperti pada percobaan mencari nilai Kp untuk set point 40 cm ketika nilai Kp = 1 error yang dihasilkan adalah 7.7 cm dan waktu yang dihasilkan sangat lambat (waktu = 0.69 s). Tetapi ketika nilai Kp terlalu besar (Kp = 20000) maka dihasilkan error negatif (error = -2.8 cm ) tetapi waktu
yang dihasilkan sangat cepat (waktu = 0.41 s). Semakin besar nilai Kp, maka waktu yang dihasilkan untuk mencapai respon sistem akan semakin cepat.
Dari percobaan, nilai Ki dimasukkan menghasilkan error negatif yang sangat besar. Untuk percobaan mencari nilai Ki untuk set point 15 cm, actual point yang dihasilkan ± 30- 32.5 cm. Untuk 40 cm adalah ± 20-22 cm. Untuk 75 cm, actual point yang didapat hampir ± 93- 94 cm. Untuk penggabungan parameter proporsional dan integral saja dihasilkan respon sistem yang kurang baik untuk sistem ini. Untuk sistem ini parameter Propotional (P) dan Integral (I) harus ditambah parameter Derivative (D).
Dari percobaan, ketika nilai Kd terlalu kecil maka kemampuan meredam error negatif untuk mendekati jarak yang dimasukkan akan semakin kecil; seperti pada percobaan mencari nilai Kd untuk set point 40 cm. Ketika nilai Kd = 100, error yang dihasilkan adalah -2.5, sedangkan ketika nilai Kd = 60000, error yang dihasilkan adalah -1.9.
Dalam percobaan mencari nilai Kd setiap percobaan, waktu yang dihasilkan tidak terkendali atau sering berubah-ubah; seperti pada percobaan mencari nilai Kd untuk set point 40 cm. Ketika nilai Kd = 20000, waktu yang dihasilkan adalah 1.35 s; sedangkan Kd = 25000, waktu yang dihasilkan adalah 1.45 s. Tetapi ketika nilai Kd = 45000, waktu yang dihasilkan adalah 1.4 s. Waktu yang dihasilkan ini berubah-ubah disebabkan oleh efek redaman yang dihasilkan oleh nilai Kd.
Gambar 7 Grafik Perbandingan Penggunaan PID Untuk Set Point 15 cm
Dengan menggunakan Kp saja dihasilkan error sebesar 0.4 cm dan waktu respon yang dihasilkan adalah 0.24 s. Ketika Kp digabungkan dengan nilai Ki maka dihasilkan error yang sangat besar yaitu 15.2 cm dan waktu yang dihasilkan adalah 0.5 s. Oleh karena itu, penggabungan nilai Kp dan Ki kurang menghasilkan respon sistem yang kurang baik dalam system ini. Ketika nilai Kp dan Ki digabungkan dengan nilai Kd, maka error yang dihasilkan hampir mendekati 0 yaitu 0.1 cm. Tetapi waktu yang dihasilkan lebih lama yaitu 0.33. Hal ini disebabkan oleh nilai Kd terdapat efek redaman di sistem. Efek redaman ini seperti berosilasi ketika mendekati set point, jadi waktu ini didapat setelah efek tersebut berhenti atau penunjuk benar-benar berhenti.
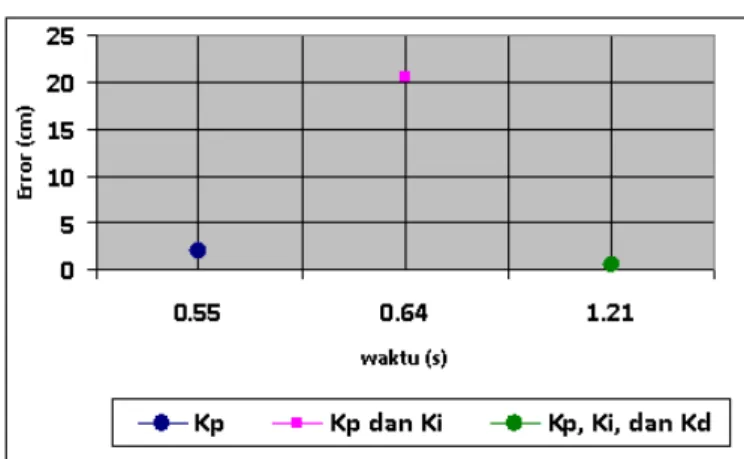
Gambar 8 Grafik Perbandingan Penggunaan PID Untuk Set Point 40 cm
Dengan menggunakan Kp saja dihasilkan error sebesar 2 cm dan waktu respon yang dihasilkan adalah 0.55s. Ketika Kp digabungkan dengan nilai Ki maka dihasilkan error yang sangat besar yaitu 20.5 cm dan waktu yang dihasilkan adalah 0.64s. Oleh karena itu untuk system ini untuk penggabungan nilai Kp dan Ki kurang menghasilkan respon system yang kurang baik. Ketika nilai Kp, Ki digabungkan dengan nilai Kd maka error yang dihasilkan hampir mendekati 0 yaitu 0.6 cm, tetapi waktu yang dihasilkan lebih lama yaitu 1.21 s. Hal ini disebabkan karena dengan nilai Kd terdapat efek redaman di system. Efek redaman ini seperti berosilasi ketika mendekati set point, jadi waktu ini didapat setelah efek tersebut berhenti atau penunjuk benar-benar berhenti.
Gambar 9 Grafik Perbandingan Penggunaan PID Untuk Set Point 75 cm
Dengan menggunakan Kp saja dihasilkan error sebesar 0.3 cm dan waktu respon yang dihasilkan adalah 1.1s; sama dengan percobaan untuk set point 15 cm dan 40 cm. Ketika Kp digabungkan dengan nilai Ki maka dihasilkan error yang sangat besar yaitu 17.4 cm dan waktu yang dihasilkan adalah 1.38 s. Oleh karena itu, penggabungan nilai Kp dan Ki dalam sistem ini menghasilkan respon sistem yang kurang baik. Ketika nilai Kp, Ki digabungkan dengan nilai Kd, maka error yang dihasilkan hampir mendekati 0 yaitu 0.2 cm. Tetapi waktu yang dihasilkan lebih lama yaitu 1.94 s. Hal ini disebabkan karena dengan nilai Kd terdapat efek redaman di sistem. Efek redaman ini seperti berosilasi ketika mendekati set point, jadi waktu ini didapat setelah efek tersebut berhenti atau penunjuk benar-benar berhenti.
SIMPULAN
Dari percobaan, ketika nilai Kp terlalu kecil (Kp =1), maka menghasilkan error yang sangat besar (7.7 cm) dan waktu yang dihasilkan sangat lambat (waktu = 0.69 s). Tetapi ketika nilai Kp terlalu besar (Kp = 20000), maka dihasilkan error negatif (error = -2.8 cm) tetapi waktu yang dihasilkan sangat cepat (waktu = 0.41 s). Semakin besar nilai Kp maka waktu yang dihasilkan untuk mencapai respon sistem akan semakin cepat.
Jika nilai Ki dimasukkan akan menghasilkan error negatif yang sangat besar. Dalam percobaan mencari nilai Ki untuk set point 15 cm, actual point yang dihasilkan ± 30- 32.5 cm; untuk 40 cm adalah ± 60-62 cm; untuk 75 cm, actual point yang didapat hampir ± 93- 94 cm .
Ketika nilai Kd terlalu kecil (Kd = 100), maka kemampuan meredam error negatif untuk mendekati jarak yang dimasukkan akan semakin besar (-2.5 cm). Sedangkan ketika nilai Kp terlalu besar (Kd = 60000), error yang dihasilkan semakin kecil (-1.9).
Dalam percobaan mencari nilai Kd setiap percobaan, waktu yang dihasilkan tidak terkendali atau sering berubah-ubah. Misalnya seperti pada percobaan mencari nilai Kd untuk set point 40 cm; ketika nilai Kd = 20000, waktu yang dihasilkan adalah 1.35s, sedangkan Kd = 25000 waktu yang dihasilkan adalah 1.45s. Tetapi ketika nilai Kd = 45000, waktu yang dihasilkan adalah 1.4s. Waktu yang dihasilkan ini berubah-ubah disebabkan oleh efek redaman yang dihasilkan oleh nilai Kd.
Dalam sistem ini, penggabungan parameter P dan I juga tidak menghasilkan respon sistem yang baik. Tetapi penggabungan parameter P dan D tidak bisa digunakan karena menyebabkan sistem tidak stabil. Oleh karena itu, sistem ini harus menggunakan penggabungan antara parameter P, I dan D untuk menghasilkan respon sistem yang baik.
Dari percobaan mencari nilai Kp, nilai Ki dan nilai Kd yang optimal didapat adalah (1) untuk set point 15 cm yaitu nilai Kp = 850, Ki =7, Kd = 8000; dihasilkan error sebesar -0.1 dengan waktu 0.33s; (2) untuk set point 40 cm yaitu nilai Kp = 2000, Ki = 80, Kd = 8000; dihasilkan error
sebesar -0.6 dengan waktu 1.21s; (3) untuk set point 75 cm yaitu nilai Kp = 12000, Ki = 100, Kd =30000; dihasilkan error sebesar 0.2 dengan waktu 1.94s.
DAFTAR PUSTAKA
Kuo, B. .C (1985). Automatic Control System 4th edition. New Delhi: Prentice Hall. Ogata, K. (1996). Modern Control Engineering 2nd edition. New Jersey:Prentice Hall Inc.,