6 Veren Nurlin Nabilah
BAB 2
TEORI DASAR PERANCANGAN GEOMETRI JALAN
2.1 Langkah-Langkah Penyelesaian
Dalam penyelesaian Tugas Geometri Jalan Raya memerlukan alur atau urutan penyelesaian tugas. Perencanaan Geometri Jalan antar kota meliputi 5 tahapan yang berurutan, yaitu :
1. Melengkapkan data dasar, 2. Identifikasi lokasi jalan,
3. Penetapan kriteria perancangan,
4. Penetapan alignment jalan yang optimal, dan
5. Penggambaran detail perancangan geometri jalan raya dan pekerjaan tanah.
2.1.1 Data Dasar
Data dasar yang diperlukan untuk suatu perencanaan suatu geometri adalah : a) peta topografi berkontur yang akan menjadi peta dasar perencanaan jalan
dengan skala tidak lebih kecil dari 1 : 10.000 (skala lain misal 1 : 2500 dan 1 : 500). Perbedaan tinggi tiap garis kontur disarankan untuk tidak lebih besar dari 5 meter,
b) peta geologi yang memuat informasi daerah lebih dari daerah stabil, c) peta tata guna lahan yang memuat informasi ruang penutupan jalan, dan d) peta jaringan jalan yang ada.
2.1.2 Identifikasi Lokasi Jalan
Identifikasi lokasi jalan dilakukan setelah data-data dasar didapatkan. Dengan menggunakan data-data dasar maka dapat diperoleh :
a) kelas median jalan,
b) titik awal dan akhir perencanaan,dan
c) identifikasi daerah-daerah yang layak dilintasi jalan berdasarkan struktur tanah dan struktur geologi pada peta dasar perencanaan serta pertimbangan- pertimbangan lainnya yang dianggap perlu.
Klasifikasi menurut medan jalan dapat dilihat pada Tabel 2.1 sebagai berikut : Tabel 2.1 Klasifikasi menurut Medan Jalan
No. Jenis Medan Notasi Kemiringan Medan (%)
1. Datar D < 3
2. Perbukitan B 3 – 25
3. Pegunungan G > 25
(Sumber : Tata Cara Perencanaan Geometri Jalan Antar Kota, 1997)
2.1.3 Penetapan Kriteria Perencanaan a) Tetapkan
1. Untuk perencanaan geometric, perlu ditetapkan klasifikasi menurut fungsi jalan (dapat dilihat pada Tabel 1.1).
2. Kendaraan rencana (dimensi kendaraan dapat dilihat pada Tabel 2.2).
Tabel 2.2 Dimensi Kendaraan Rencana Kategori
Kendaraan Rencana
Dimensi Kendaraan
(cm) Tonjolan (cm) Radius Putar Radius Tonjolan
t l p Depan Belakang Min Max
Kecil 130 210 580 90 150 420 730 780
Sedang 410 260 1210 210 240 740 1280 1410
Besar 410 260 2100 120 90 290 1400 1370
(Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, 1997)
3. VLHR dan VJR
Volume Lalu Lintas Harian Rencana (VLHR) adalah perkiraan volume lalu lintas pada akhir tahun rencana lalu lintas, dinyatakan dalam SMP/hari. Volume Jam Rencana (VJR) adalah perkiraan volume lalu lintas pada jam sibuk tahun rencana lalu lintas, dinyatakan dalam SMP/jam.
4. Kecepatan Rencana (Vr)
Kecepatan rencana adalah kecepatan maksimum yang aman dan dapat dipertahankan sepanjang bagian tertentu pada jalan raya tersebut. Jika kondisi
Veren Nurlin Nabilah yang beragam tersebut menguntungkan dan terjaga oleh keistimewaan perencanaan jalan.
b) Kriteria perencanaan tersebut ditetapkan berdasarkan atas pertimbangan kecenderungan perkembangan transportasi di masa yang akan datang, sehingga jalan yang dibangun dapat memenuhi fungsinya.
2.1.4 Penetapan Alignment Jalan 2.1.4.1 Alignment Horizontal
a) Berdasarkan kriteria perencanaan, ditetapkan : 1. Jari-jari lengkung minimum horizontal, 2. Kelandaian jalan maksimum,
3. Panjang maksimum jalan yang lurus,
4. Jarak pandang henti dan jarak pandang mendahului/menyiap.
b) Dengan memperhatikan kriteria perencanaan dan DAMIJA (Daerah Milik Jalan) pada peta dasar perencanaan, rencana alignment horizontal jalan untuk beberapa alternatif-alternatif lintasan.
c) Pada setiap alignment bubuhkan “nomor station” disingkat “Sta” dan ditulis
“Sta xxx+yyy” dimana xxx adalah satuan kilometer dan yyy adalah satuan meter, persamaan Sta ditetapkan sebagai berikut :
1. Pada bagian jalan lurus, Sta dibubuhkan pada setiap 50 meter.
2. Pada bagian lengkung, Sta dibubuhkan pada setiap 20 meter.
3. Penulisan Sta pada gambar dilakukan di sebelah kiri dari arah kilometer ke kilometer besar.
2.1.4.2 Alignment Vertikal
a) Berdasarkan kriteria perencanaan, ditetapkan : 1. Jari-jari vertikal minimum,
2. Kelandaian jalan maksimum,
3. Panjang jalan dengan kelandaian tertentu yang membutuhkan lajur pendakian,
4. Jarak pandang henti dan jarak pandang mendahului/menyiap.
b) Dengan memperhatikan kriteria perencanaan gambar alignment vertikal untuk semua alternatif alignment horizontal, gambar alignment vertikal berskala panjang 1 : 1000 dan skala vertikal 1 : 100.
c) Setiap alignment perlu diuji terhadap pemenuhan jarak pandang sesuai ketentuan.
2.1.4.3 Potongan Melintang
a) Berdasarkan kriteria perencanaan, ditetapkan : 1. Lebar jalur, lebar lajur, dan lebar bahu jalan, 2. Pelebaran jalan di tikungan untuk setiap tikungan
3. Daerah manfaat jalan, daerah milik jalan, dan pengawasan jalan.
b) Rencanakan gambar potongan melintang jalan dengan skala horizontal 1 : 100 dan skala vertikal 1 : 10. Gambar potongan dibuat untuk setiap Sta.
2.1.4.4 Pemilihan Alignment yang Optimal
a) Perencanaan untuk beberapa alternatif bertujuan mencari alignment jalan yang efisien.
b) Pada beberapa alignment yang paling efisien, perlu di elevasi, koordinat antara alignment horizontal dan vertikal.
2.1.5 Pengujian Rencana Geometrik
Bagian-bagian rencana yang disajikan meliputi :
a) Gambar alignment horizontal yang digambarkan pada peta topografi berkontur,
b) Gambar alignment vertikal jalan, c) Diagram elevasi,
d) Gambar potongan melintang,
e) Diagram pekerjaan tanah (mass diagram), dan f) Bagian-bagian lain yang dianggap perlu.
Veren Nurlin Nabilah 2.2 Dasar Teori
Jalan raya merupakan salah satu factor yang mempengaruhi perkembangan suatu wilayah. Dengan kelancaran perhubungan antar daerah, maka roda perekonomian juga akan berjalan lancar. Untuk itu diperlukan sarana dan prasarana yang memadai agar tercipta jalan raya yang aman dan nyaman, maka diperlukan perencanaan jalan raya yang baik. Di Indonesia, penentuan jalan telah ditetapkan dalam tata cara perencanaan geometric jalan antar kota yang dikeluarkan oleh Departemen Pekerjaan Umum Direktorat Jendral Bina Marga Tahun 1997.
Rumus-rumus yang dipergunakan dalam perhitungan perencanaan jalan raya antara lain :
2.2.1 Perhitungan Azimuth
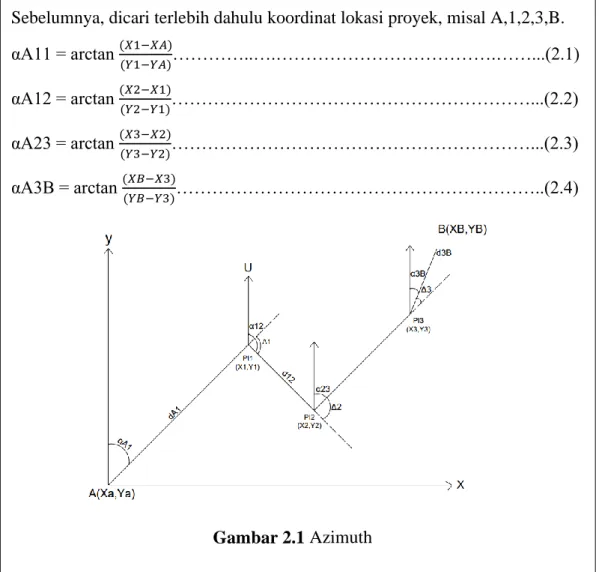
Sebelumnya, dicari terlebih dahulu koordinat lokasi proyek, misal A,1,2,3,B.
αA11 = arctan (𝑋1−𝑋𝐴)
(𝑌1−𝑌𝐴)…………..….……….……...(2.1)
αA12 = arctan (𝑋2−𝑋1)
(𝑌2−𝑌1)………...(2.2)
αA23 = arctan (𝑋3−𝑋2)
(𝑌3−𝑌2)………...(2.3)
αA3B = arctan (𝑋𝐵−𝑋3)
(𝑌𝐵−𝑌3)………..(2.4)
Gambar 2.1 Azimuth
2.2.2Penentuan Kelandaian Melintang dan Kelas Medan Kemiringan medan dapat dirumuskan dengan Persamaan (2.5).
𝑖 = 𝛥ℎ
𝐿 𝑥 100%...(2.5) Dimana :
i = kemiringan medan
Δh = beda tinggi (kiri, kanan = melintang; atas, bawah memanjang) 2.2.2.1 Klasifikasi kemiringan menurut medan jalan
Kemiringan :
➢ 0 - 0,9% daerah datar
➢ 1,0 - 24,9% daerah perbukitan
➢ > 25% daerah pegunungan
(Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, 1997)
2.2.2.2 Penentuan Kelas Medan
Spesifikasi standar untuk perencanaan geometrik jalan raya kota Bina Marga dapat dilihat pada Tabel 2.3.
Tabel 2.3 Klasifikasi Menurut Kemiringan Melintang
Jenis Medan Kemiringan Melintang Rata-Rata (%)
Datar < 3
Perbukitan 3 – 25
Pegunungan > 25
(Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, 1997)
2.2.3 Alignment Horizontal
2.2.3.1 Pengertian dan Macam Tikungan
Alignment horizontal atau trace adalah garis proyeksi sumbu jalan tegak lurus pada bidang peta. Trace adalah susunan dari potongan-potongan garis lurus yang disebut “Tangent”, diantara tangent dihubungkan dengan lengkung-lengkung yang berupa busur lingkaran (circle) atau busur lingkaran ditambah lengkung peralihan saja, lengkung-lengkung tersebut disebut lengkung horizontal atau tikungan.
Veren Nurlin Nabilah Tikungan terdiri dari 3 macam, antara lain,
1) Lengkung busur lingkaran sederhana (full circle)
Lengkung yang dapat dibuat bentuk busur lingkaran sederhana, yaitu lengkung yang mempunyai radius besar. Superelevasi yang dibutuhkan <
30% untuk mengatasi perubahan kemiringan melintang yang tajam.
2) Lengkung busur lingkaran dengan lengkung peralihan (spiral-circle-spiral) Lengkung yang memiliki busur lingkaran dan busur spiral yang merupakan lengkung peralihan penghubung dengan bagian lurus dengan radius tak terhingga dari bagian lingkaran.
3) Lengkung spiral-spiral
Lengkung berupa busur lingkaran, sehingga titik spiral circle terhimpit dengan titik circle spiral. Panjang busur lingkaran Lc=0 dan s = 0,5 β, jari- jari rencana harus sedemikian rupa sehingga Ls yang dibuthkan lebih besar dari Ls yang menghasilkan landai relatif.
Gambar 2.2 Kelandaian melintang
2.2.3.2 Pengertian Lengkung Spiral dan Rumus
Lengkung Spiral merupakan lengkung yang terletak antara bagian lurus dari suatu jalan (R=0) dan bagian lengkung suatu jalan di tikungan yang berjari-jari tetap (R=Desain).
Berdasarkan waktu tempuh maksimum (3 detik), untuk melintasi lengkung peralihan, maka panjang lengkung:
Ls = 𝑉𝑟
3,6T………..…………(2.6)
Berdasarkan antisipasi gaya sentrifugal:
Ls = 0,022 𝑉𝑅3
𝑅−𝑅𝑐– 2,727 𝑉𝑟.𝑒𝑡𝑗𝑑
𝑡 ………..………(2.7)
Berdasarkan tingkat pencapaian perubahan kelandaian : Ls = (𝑒𝑚−𝑒𝑛)𝑉𝑟
3,6 𝑟𝑏 ……….……….(2.8)
Keterangan :
T = waktu tempuh pada lengkung peralihan, ditetapkan 3 detik.
V = Kecepatan rencana (km/jam)
C = perubahan percepatan diambil 0,3 – 1,0 disarankan 0,4 m/det² R = jari-jari busur lingkaran (m)
em = Superelevasi maksimum en = Superelevasi Normal
r = tingkat pencapaian perubahan kemiringan melintang jalan Untuk VR ≤ 70 km/jam, rB = 0,035 m/m/dt
Untuk VR ≥ 80 km/jam, rB= 0,025 m/m/dt
A. Tikungan Full Circle (C-C) TC = 𝑅𝑟 𝑡𝑎𝑛 1
2 𝐴 FC = 𝑇𝐶 𝑡𝑎𝑛 1
4 𝐴 LC = 𝐴
180 𝐴 𝑇𝐸 𝑅𝑟 k = 𝐴
180 𝐴 𝐿𝑡 𝑅𝑟 e terjadi ≤ 3%
Veren Nurlin Nabilah Gambar 2.3 Alignment Horizontal dan Superelevasi FC
Keterangan:
TC = Titik peralihan dari bentuk tangent ke bentuk lingkaran CT = Titik peralihan dari unsur lingkaran ke bentuk tangent PH = Titik perpotongan dari bagian kelas jalan
D = Sudut yang dibentuk dari bagian kelas jalan TL = Jarak TC dengan FH
EI = Jarak titik PH dengan busur lingkaran LC = Panjang busur lingkaran
B. Tikungan Spiral-Circle-Spiral (S-C-S)
𝑋𝑆 = 𝐿𝑆(1 − (𝐿𝑆)2 40(𝑅𝑅)2) 𝑌𝑆 = 𝐿𝑆(𝐿𝑆)2
6𝑅𝑅 𝜃𝑆 =𝐿𝑆× 360°
2𝑅𝑅 × 2𝜋 𝜃𝐶 = ∆𝑃𝐼 − 2𝜃𝑆
𝑝 = 𝑌𝑠− 𝑅𝑅 (1 − 𝑐𝑜𝑠𝜃𝑆) 𝑘 = 𝑋𝑠− 𝑅𝑅 (𝑠𝑖𝑛𝜃𝑆)
𝑇 = (𝑅𝑅+ 𝑝) 𝑡𝑎𝑛 (1 2⁄ ∆𝑃𝐼) + 𝑘 𝐸𝑆 = (𝑅𝑅+ 𝑝) 𝑠𝑒𝑐(1 2⁄ ∆𝑃𝐼) − 𝑅𝑅 𝐿 = 𝐿𝐶+ 2 𝐿𝑆
syarat > 20 cm
Veren Nurlin Nabilah Gambar 2.4 Alignment horizontal dan superelevasi S-C-S
Keterangan:
Titik Ls berhimpit dengan titik θ Panjang LC = 0 dan θ = ½ β 𝐿𝑆 =𝜃𝑆 𝑥 𝑃𝐶
90°
𝑇𝑆 = (𝑅𝑅 + 𝑝) 𝑡𝑎𝑛 (1 2⁄ 𝛽) + 𝑘
𝐸𝑆 = (𝑅𝑅 + 𝑝) 𝑠𝑒𝑐(1 2⁄ 𝛽) − 𝑅𝑅
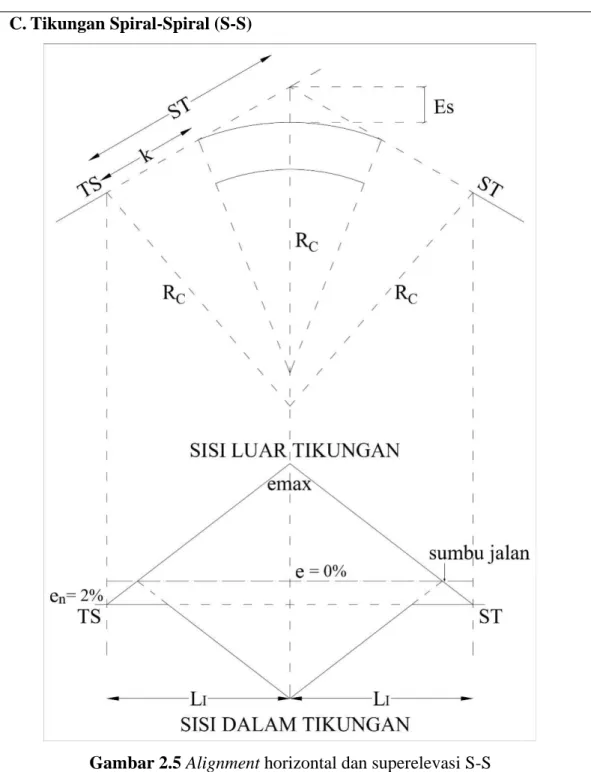
C. Tikungan Spiral-Spiral (S-S)
Gambar 2.5 Alignment horizontal dan superelevasi S-S Keterangan :
TS = titik peralihan bagian luas ke bagian spiral SC = titik peralihan bagian spiral ke bagian lingkaran
Veren Nurlin Nabilah X3 = L−(1 − 𝐿2
40𝑅2) X1 = 𝐿
2 6𝑅
𝜃𝑠 = 𝐿𝑠
2𝐿𝑟
𝜃𝑠 =90𝐿𝑠
𝐽𝑇𝑅𝑐
P = 𝐿𝑠
6−𝑅𝑠− (1 − 𝑐𝑜𝑠 𝜃) k = L3−Ls3−𝑅𝑐sin 𝜃𝑠 𝜃𝑐 = β -𝜃𝑠
Es = (Rc + p) sec 1
2β−𝑅𝑐 Ts = (Rc - p) tan 1
2β−𝑘 Lc =𝜃𝑠
100− 𝑅𝑐
2.2.3.3 Perhitungan Perletakan Perkerasan Tikungan
Perhitungan perletakan perkerasan tikungan menggunakan persamaan (2.9).
𝐵 = (𝑛)(𝑏′ + 𝑐) + (𝑛 − 1)𝑇𝑑+ 𝑧………..………(2.9) dimana : 𝑇𝑑 = 𝑅𝑟2+ 𝐴(2𝑝 + 𝐴) − 𝑅𝑟
𝑧 = 0,15×𝑉𝑟
√𝑅
𝑏′ = 𝑅𝑟− 𝑅2− 𝑝2 𝑝′ = 𝑏 + 𝑏"
Keterangan n = Jumlah jalur lalu lintas
b = Lebar jejak kendaraan ban keluar daerah tangen A = Profil overlapping
C = Kebebasan samping
Gambar 2.6 Pelebaran dan perkerasan pada tikungan Keterangan,
BC = WC = lebar perkerasan jalan pada tikungan (m) B = W = pelebaran perkerasan (m)
Bn = Wn = lebar perkerasan pada jalur lurus R = jari-jari tikungan
b’ = lebar lintasan kendaraan truk pada tikungan (m) n = jumlah jalur lalu lintas
c = kebebasan samping tiap kendaraan (m) = 0,8 m
b = lebar jarak kendaraan antara kedua ban → untuk Su = 2,5 m Td = FA = lebar tambahan pengerasan untuk tonjolan depan (m) P = L = jarak antara gandar depan dan belakang, Su = 6 m A = tonjolan depan kendaraan (m) → Su = 1,2 m
z = tambahan pengerasan akibat kelalaian/kesukaran dalam mengemudi di tikungan
Veren Nurlin Nabilah 𝐵𝐶 = 𝑛(𝑏′ + 𝑐) + (𝑛 − 1)𝑇𝑑+ 𝑧
𝑇𝑑 = 𝑅2+ 𝐴(2𝐿 + 𝐴) − 𝑅𝑟 𝑧 =0,1 × 𝑉𝑟
√𝑅
𝑏′ = 𝑏 + 𝑅 − √𝑅2− 𝑝2
2.2.3.4 Perhitungan Kebebasan Samping
Perhitungan kebebasan samping menggunakan persamaan (2.10) dan persamaan (2.11).
𝑅′ = 𝑅 1 4⁄ 𝑊………...….(2.10) 𝐿′ = 2𝐿𝑠+ 𝐿𝑐………(2.11) Berdasarkan jarak pandang henti, perhitungan menggunakan persamaan (2.12).
𝑚 = 𝑅′ (1 −cos 90°𝑠ℎ
3,14𝑅1 )………...…(2.12)
Berdasarkan jarak pandang menyiap, perhitungan menggunakan persamaan (2.13) dan persamaan (2.14).
𝜃 = 90𝐿
𝜋×𝑅………..………(2.13)
𝑚 = 𝑅′(1 − cos 𝜃) + 0,5 sin 𝐿 sin 𝐸……….…(2.14)
Gambar 2.7 Daerah bebas samping tikungan untuk Jh < Lt
Gambar 2.8 Daerah bebas sampinng tikungan untuk Jh > Lt Keterangan :
Jh = jarak pandang henti R = jari-jari tikungan Lt = panjang tikungan Perhitungan kebebasan samping :
𝑅′ = 𝑅 1 4⁄ 𝑊 𝐿 = 2𝐿𝑠′ + 𝐿𝑐
Berdasarkan jarak pandang henti : 𝑚 = 𝑘′ (1 −cos 90° 𝑠ℎ
3,14𝑅′ )
Berdasarkan jarak pandang menyiap : 𝜃 = 90𝐿
𝜋 × 𝑅′
𝑚 = 𝑘′(1 − cos 𝜃) + 0,5 (500 − L) sin 𝜃
2.2.3.5 Rumus-rumus Aligment Vertikal Menentukan Lv berdasarkan :
a. Grafik Lv TPGJAK 1997 b. Syarat drainase
𝐿𝑣 = 𝐴 . 40 ………..(2.15) c. Syarat kenyamanan
𝐿𝑣 = 𝐴 . 𝑉2
360 ……….. …………(2.16)
Veren Nurlin Nabilah d. Syarat keluasaan bentuk
𝐿𝑣 = 0,6 . 𝑉………... ……..(2.17) e. Syarat jarak pandang henti :
Bila s < Lv 𝐿𝑣 = 𝐴 𝑠2
100 (√2ℎ1+√2ℎ2)2 ………..(2.18) Bila s > Lv
𝐿𝑣 =25−200 (ℎ1+ℎ2)2
𝐴 ………....(2.19)
f. Syarat jarak pandang : Bila s < Lv
𝐿𝑣 = 𝐴 𝑠2
100 (√2ℎ1+√2ℎ2)2 ………..(2.20) Bila s > Lv
𝐿𝑣 =25−200 (ℎ1+ℎ2)2
𝐴 ………(2.21)
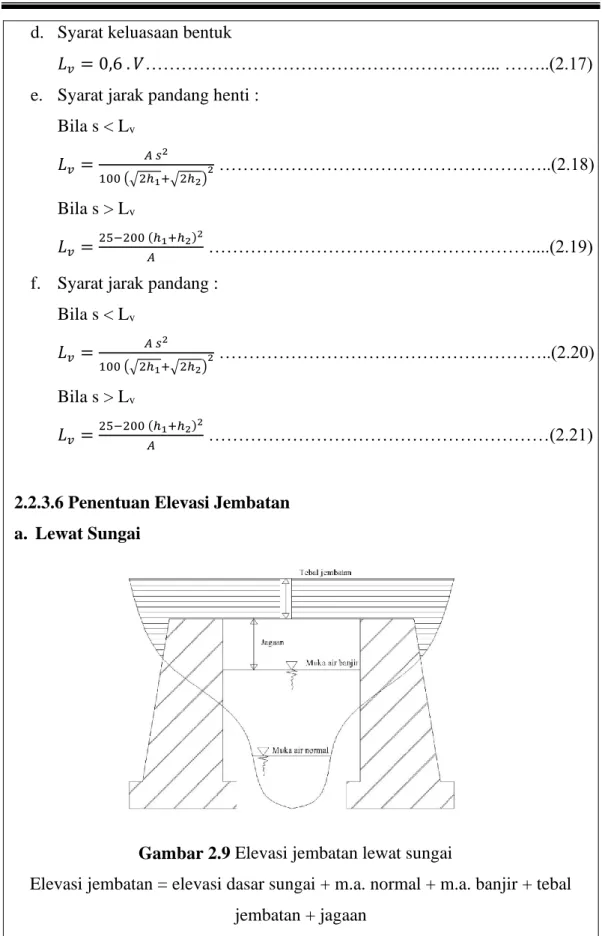
2.2.3.6 Penentuan Elevasi Jembatan a. Lewat Sungai
Gambar 2.9 Elevasi jembatan lewat sungai
Elevasi jembatan = elevasi dasar sungai + m.a. normal + m.a. banjir + tebal jembatan + jagaan
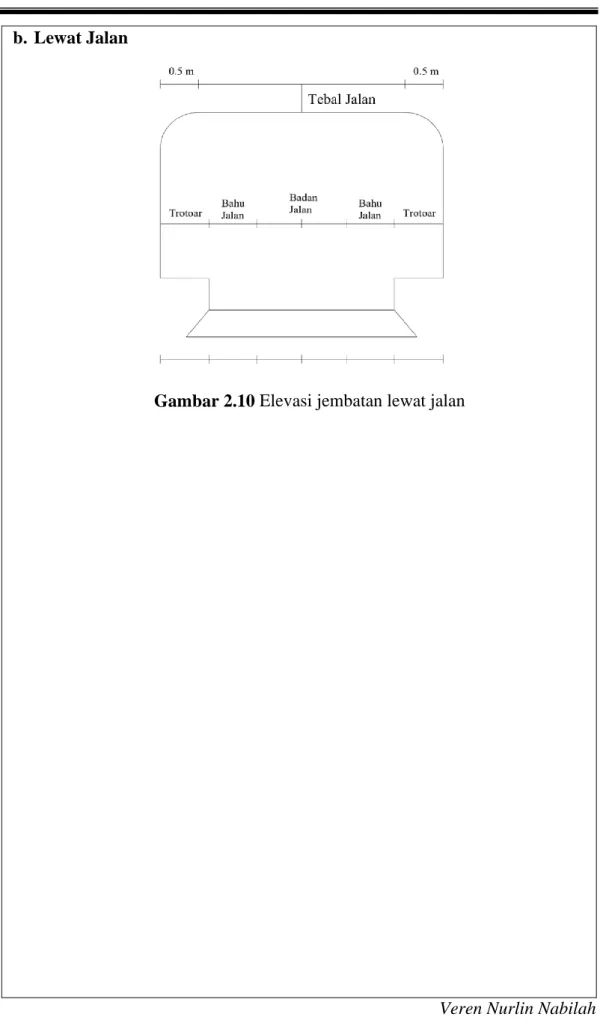
b. Lewat Jalan
Gambar 2.10 Elevasi jembatan lewat jalan
Veren Nurlin Nabilah Flowchart Alignment Horizontal
START
Data
Jenis jalan untuk mencari Vrencana
Lebar perkerasan Lebar bahu jalan e normal
e maks b
CC (Circle-circle) Syarat :
- Hanya lengkung dengan radius besar - Untuk superelevasi
≤ 3%
- Rmin ditentukan oleh R yang menghasilkan superlevasi 3%
- B > 0 - Lc ≥ 20 m Kontrol : 2Tt > Lc
Tc
SS (Spiral- Spiral) Syarat :
- 𝜃𝑠 = ½ β - Lc ≤ 20 m - 𝐿𝑐 = 𝜃𝑐
180𝜋 𝑅𝑟 Kontrol :
Tt > Ls , dimana Tt=(Rr+P)tan 𝛽 2⁄ +k 𝐿𝑠 = 2 𝑅𝑟. 2𝜋2𝜃𝑠
360 SCS (Spiral-Circle-
Spiral) Syarat : - Rmin yang
ditentukan oleh panjang busur lingkaran yang terjadi
- Tergantung sudut β yang direncanakan atau terjadi
- B > 0 - Lc ≥ 20 m Kontrol : 2Tt > 2Ls + Lc
A A
B A
C A Perencanaan ulang / ubah data
tidak
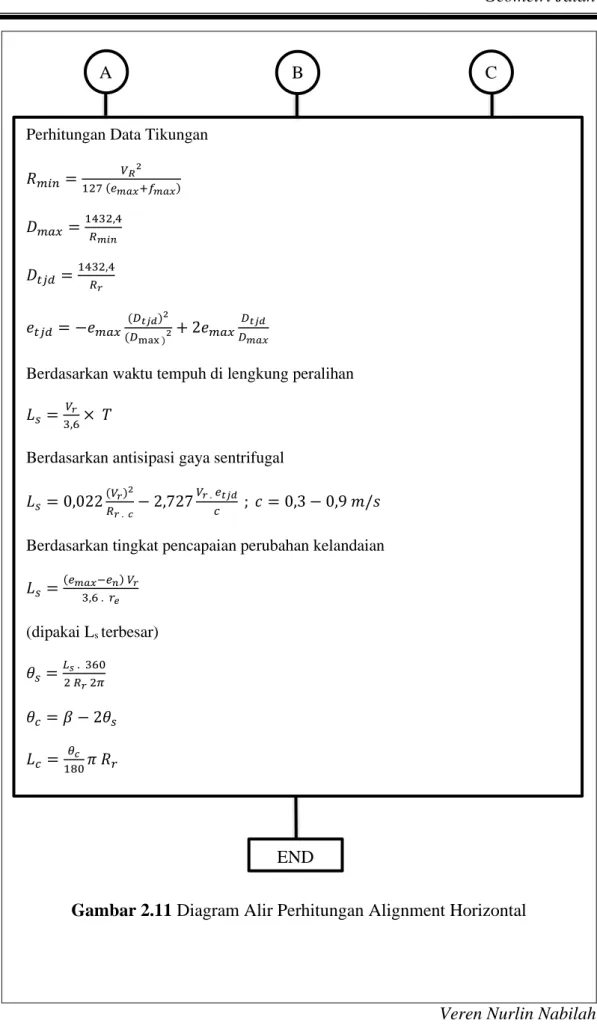
Gambar 2.11 Diagram Alir Perhitungan Alignment Horizontal A
A
B A
C A Perhitungan Data Tikungan
𝑅𝑚𝑖𝑛= 𝑉𝑅2
127 (𝑒𝑚𝑎𝑥+𝑓𝑚𝑎𝑥) 𝐷𝑚𝑎𝑥=1432,4
𝑅𝑚𝑖𝑛 𝐷𝑡𝑗𝑑 =1432,4
𝑅𝑟 𝑒𝑡𝑗𝑑= −𝑒𝑚𝑎𝑥 (𝐷𝑡𝑗𝑑)2
(𝐷max )2+ 2𝑒𝑚𝑎𝑥 𝐷𝑡𝑗𝑑
𝐷𝑚𝑎𝑥
Berdasarkan waktu tempuh di lengkung peralihan 𝐿𝑠= 𝑉𝑟
3,6× 𝑇
Berdasarkan antisipasi gaya sentrifugal 𝐿𝑠= 0,022(𝑉𝑟)2
𝑅𝑟 . 𝑐− 2,727𝑉𝑟 . 𝑒𝑡𝑗𝑑
𝑐 ; 𝑐 = 0,3 − 0,9 𝑚/𝑠
Berdasarkan tingkat pencapaian perubahan kelandaian 𝐿𝑠=(𝑒𝑚𝑎𝑥−𝑒𝑛) 𝑉𝑟
3,6 . 𝑟𝑒 (dipakai Ls terbesar) 𝜃𝑠=𝐿𝑠 . 360
2 𝑅𝑟 2𝜋 𝜃𝑐= 𝛽 − 2𝜃𝑠 𝐿𝑐 =180𝜃𝑐 𝜋 𝑅𝑟
END
Veren Nurlin Nabilah 1. Circle - Circle (C-C)
START Data : Vr
en
emax
F B
Rmin = 𝑉𝑟2
127 ( 𝑒𝑚+𝑓)
Dmax = 143,4
𝑅
Dtjd = 143,4
𝑅𝑟
etjd = −𝑒𝑚𝑎𝑥 × (𝐷𝑡𝑗𝑑)2
𝐷𝑚𝑎𝑥 + 2 × 𝑒𝑚𝑎𝑥 × 𝐷𝑡𝑗𝑑
𝐷𝑚𝑎𝑥
Berdasarkan waktu tempuh di lengkung peralihan 𝐿𝑠 = 𝑉𝑅
3,6× 𝑇
Berdasarkan antisipasi Gaya Sentrifugal 𝐿𝑠= 0,022 × 𝑉𝑅3
𝑅 × 𝑐 − 2,727 𝑉𝑅× 𝑒𝑡𝑗𝑑 𝑐
A
Gambar 2.12 Diagram Alir Perhitungan Lengkung Busur F-C Dipakai Ls terbesar
𝜃𝑠 = 𝐿𝑠× 360 2 × 𝑅𝑟× 2𝜋
𝐴𝑡= 𝛽. 2𝜃𝑠
B > 0 L > 20 cm
END A
Berdasarkan tingkat pencapaian perubahan kelandaian 𝐿𝑠= (𝑒𝑚− 𝑒𝑛)× 𝑉𝑅
3,6 × 𝜋 × 𝑒
𝑇𝑡= 𝑅𝑟 𝑡𝑎𝑛 (1/2 𝛽)
𝑇𝑐 = 𝑅𝑟
𝑐𝑜𝑠 (1/2 𝛽) − 1
Kontrol = 2𝑇𝑡 < 𝐿𝑠
Veren Nurlin Nabilah 2. S-C-S (Spiral-Circle-Spiral)
START
Data : Vr F en B emax
Rmin = 𝑉𝑅
2 127 (𝑒𝑚𝑎𝑥+𝑓)
Dmax = 134,4
𝑅𝑚𝑖𝑛
Dterjadi = 1432,4
𝑅𝑟
eterjadi = -emax (𝐷𝑡𝑗𝑑)2
𝐷𝑚𝑎𝑥 + 2emax 𝐷𝑡𝑒𝑟𝑗𝑎𝑑𝑖
𝐷𝑚𝑎𝑥
Berdasarkan waktu tempuh di lengkung peralihan LS = 𝑉𝑅
3,6 T
Berdasarkan tingkat pencapaian perubahan kelandaian LS = (𝑒𝑚−𝑒𝑛) 𝑉𝑅
3,6 𝑅𝑒
A
h = x – Rr sinθS
P = y – R (1 – πs.θS)
Tt = (R + P) tan (1
⁄ 𝛽) tk 2
Et = Rr + P 𝑅𝑟
cos1 2⁄ 𝐴
Kontrol 2Tt > 2LS+LC
Gambar 2.13 Diagram Alir Perhitungan Lengkung Busur Lingkaran dengan Lengkung Peralihan (S–C–S)
A
θS = 𝐿𝑠
2𝑅𝑟 - 360
2𝜋
θC = β - 2 θS
LC = 𝐴𝑐
180 . T1 . Rr
AT > 0 , LC > 10 m
V= 𝐿𝑠
2 6𝑅𝑟
x= LS – 𝐿𝑠
3 40𝑅𝑟
END
Veren Nurlin Nabilah 3. S-S (Spiral - Spiral)
Gambar 2.14 Diagram Alir Perhitungan Lengkung Busur Lingkaran S-S
Veren Nurlin Nabilah 2.2.4 Alignment Vertikal
Alignment vertikal adalah perpotongan bidang vertikal dengan bidang permukaan perkerasan jalan melalui sumbu jalan atau merupakan bentuk geometric jalan dalam arah vertikal. Profil ini menggambarkan tinggi rendahnya jalan terhadap muka tanah aslinya sehingga memberikan gambaran terhadap kendaraan dalam keadaan naik dan muatan penuh (truk dipakai dalam keadaan standar). Perencanaan vertikal berpengaruh besar dalam besar kecilnya biaya karena berkaitan langsung dengan pekerjaan tanahnya. Seperti diketahui bahwa pekerjaan tanah merupakan titik pekerjaan terpenting di dalam suatu proyek.
2.2.4.1 Landai Maksimum
Landai maksimum merupakan batas landai terbesar yang diperoleh untuk batas jalan tertentu agar setiap kendaraan mampu melewati tanpa mengganggu kelancaran lalu lintas. Terkadang landai maksimum dapat dilampaui, akan tetapi toleransi masih dapat ditentukan dengan catatan bahwa penyimpangan yang terjadi kecil dan yang distandarkan dari penyimpangan itu dilakukan untuk menghemat dan mengefisiensikan dana proyek.
2.2.4.2 Landai Minimum
Landai minimum merupakan batas landai terkecil yang diperlukan suatu jalan dimana masih dimungkinkan adanya saluran drainase, ke kiri dan ke kanan jalan pada saat landai tersebut secara teoritis landau minimum yang diperkenankan adalah 0,5% dimana masih dimungkinkan adanya saluran drainase. Hal ini kurang sesuai, mungkin dilihat dari pengaman jalan membuat landai sekecil mungkin atau bahkan datar. Oleh karena itu, syarat ini tidak mutlak sifatnya.
2.2.4.3 Panjang Kritis
Panjang kritis merupakan panjang landai maksimum yang ditetapkan agar kendaraan dapat mempertahankan kecepatannya sedemikian sehingga penurunan kecepatan tidak lebih dari separuh Vr. Panjang kritis sangat diperlukan sebagai batasan kelandaian maksimum agar pengurangan kecepatan
tidak lebih dari Vr. Ketentuan panjang kritis dan kelandaian dapat dilihat dalam tabel 2.4.
Tabel 2.4 Panjang Kritis dan Landai Landai
(%)
3 4 5 6 7 8 10 12
Panjang kritis (m)
400 330 260 200 170 150 135 120
(Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, 1997)
Karena pertimbangan biaya yang memaksa panjang kritis tersebut boleh dilampaui dengan ketentuan bahwa bagian jalan diatas landai kritis disampingnya harus dibuatkan suatu jalan pendakian khusus untuk kendaraan berat atau dikenal sebagai “hiking line”.
2.2.4.4 Lengkung Vertikal
Lengkung vertikal adalah perubahan landau jalan secara berangsur-angsur dari landau yang lainnya, sehingga perubahan jalan tidak bisa terasa besarnya
pengaruh dan kenyamanan pengemudi dapat terjamin. Adanya lengkung vertikal dapat dipengaruhi oleh faktor-faktor :
• Jarak pendang menyiap
• Jarak pandang henti
• Keluasan jalan dan kenyamanan
• Syarat drainase
Jenis lengkung vertikal dilihat dari letak perpotongan antara kedua bagian lurus (tangen) adalah :
a) Lengkung vertikal cekung
Yaitu lengkung dimana titik perpotongan antara kedua tangen berada dibawah permukaan jalan.
b) Lengkung vertikal cembung
Yaitu dimana titik perpotongan antara kedua tangen berada diatas permukaan jalan.
Veren Nurlin Nabilah Gambar 2.15 Diagram Perhitungan Alignment Vertikal
START Data : Sta PPV
Elevasi PPV VR
g2
g3
A2
dimana : 𝑔 =𝑒𝑙𝑒𝑣𝑎𝑠𝑖−𝑒𝑙𝑒𝑣𝑎𝑠𝑖 𝑏𝑒𝑙𝑎𝑘𝑎𝑛𝑔
𝑗𝑎𝑟𝑎𝑘 × 100%
𝐿𝑉 =𝐴𝑉2
360 (berdasarkan kenyamanan) 𝐿𝑉 = 0,6 𝑉 (berdasarkan keluwesan bentuk)
𝐿𝑉 = 𝑆𝑏𝑣 (syarat drainase)
𝐿𝑉 = 2,5𝐿𝑉2 𝐴
𝐿𝑉 = 𝐴 − 𝑦 (berdasarkan panjang minimal lengkung vertikal) 𝐿𝑉 = 𝐼2
𝐴𝑉5
𝐸 = 𝐴. 𝐿𝑦 800
Perhitungan elevasi Perhitungan stasioning
END
2.2.4.5 Lengkung Vertikal Cembung
Gambar 2.16 Lengkung vertikal cembung Rumus yang digunakan :
1. EV = ∆𝐿𝑣
800 ; ∆ = (g1 – g2)%
2. EV’ = EV . ppv – x1g1 – 4𝑥
2 𝐿𝑉2 – EV 3. g1 = 𝑡𝑖𝑡𝑖𝑘 𝑡𝑖𝑛𝑔𝑔𝑖 𝑃𝑉1 − 𝑡𝑖𝑡𝑖𝑘 𝑡𝑖𝑛𝑔𝑔𝑖 𝑃𝑉2
𝑌2𝐿𝑣 𝑥 100%
4. Lv = ∆𝑠
2
100 (2√ℎ1 − 2√ℎ2)2 ; 𝜏 < 𝐿 5. Lv = 25 . 200 (√ℎ1 +√ℎ2)2
∆
6. Syarat keluwesan bentuk = 0,6V 7. Syarat drainase
Suatu lengkung vertical cembung, bila titik potong antara kedua tangen yang bersangkutan diatas permukaan jalan, panjang minimum dari lengkung vertical cembung ditentukan berdasarkan syarat pandang henti dan drainase.
keterangan:
S = Jarak pandang
h1 = Tinggi mata pengemudi h2 = Tinggi halangan
Untuk tinggi jarak henti : h1 = 1,25 m h2 = 0,1 m
Untuk jarak pandang menyiap : h1 = 1,25 m
h2 = 1,25 m
Veren Nurlin Nabilah 2.2.4.6 Lengkung Vertikal Cekung
Gambar 2.17 Lengkung vertikal cekung
Lengkung vertikal disebut cekung adalah apabila titik potong antara kedua tangen yang bersangkutan ada di bawah permukaan jalan. Panjang lengkungan vertikal cekung minimal ditetapkan berdasarkan jarak pandang waktu malam dan drainase.
Rumus yang digunakan pada lengkung cekung sama dengan rumus yang digunakan lengkung cembung, kecuali
1. Lv = 𝑆2 × 𝐴
150 + 3,55 ; T < L 2. Lv = 25 − 150 × 3,55
∆ ; S < L 3. Syarat keluwesan bentuk = 0,6 v 4. Syarat drainase
Flowchart Alignment Vertikal Cembung
Gambar 2.18 Diagram perhitungan alignment vertikal Start
Data : - Sta PPV - g1 - Sta PPV - g2
- VR - A = (g2-g1)
Jarak pandang berada seluruhnya dalam daerah lengkung SCL
Jarak pandang berada diluar dan dalam daerah lengkung
Panjang Lengkung Vertikal
1. Berdasarkan Sifat kenyamanan : 𝐿𝑣 = 𝐴𝑣2
380
2. Berdasarkan Keluwesan bentuk : 𝐿𝑣 = 0,5 𝑉
3. Berdasarkan Drainase : 𝐿𝑣 = 40 𝐴 4. Berdasarkan jarak pandang henti (JL) :
𝐿𝑣 =40 𝐴𝑠
5. Berdasarkan table PGJR (1997)
𝐺𝑣 =𝐴𝐿𝑣 800
Perhitungan Stationary Perhitungan Elevasi
END
Veren Nurlin Nabilah Flowchart Alignment Vertikal Cekung
Gambar 2.19 Diagram alir Perhitungan Alignment Vertikal Cekung START
Data : - Sta PPV - Elevasi PPV - VR
- g1
- g2
- A – g2 – g1
Jarak penyinaran
lampu kendaraan
Jarak pandang bebas dari
bangunan
Persyaratan drainase
Kenyamanan pengemudi
Jarak penyinaran
lampu kendaraan
• S > Lv
Lv =
𝐴𝑠2 1 .20+3 .05
• S > Lv
Lv =
25 .120+3 .05 𝐴
• S > Lv Lv = 25−3840
𝑅
• S > Lv Lv = 𝐴𝑠
2
3840
Lv ada
Lv = 𝐴𝑉2
380
Lv = 0,6 V
Ev = 𝐴 .𝐿𝑣
800
Perhitungan Stasioning Perhitungan Elevasi
END
2.2.5 Jarak Pandang 2.2.5.1 Jarak Pandang Henti
Jarak pandang henti (Jh) adalah jarak minimum yang diperlukan oleh setiap pengemudi untuk menghentikan kendaraannya dengan aman begitu melihat adanya halangan di depan. Jalan harus direncanakan sehingga dapat memberikan jarak pandang yang paling besar atau paling sedikit sama dengan jarak pandangan henti minimum tersebut. Jh diukur berdasar asumsi : tinggi mata pengemudi 105 cm dan tinggi halangan 15 cm yang diukur dari permukaan jalan.
Jarak Pandang Henti (Jh) terdiri atas 2 (dua) elemen jarak, yaitu:
● Jarak Tanggap (Jht) adalah jarak yang ditempuh oleh kendaraan sejak pengemudi melihat suatu halangan yang menyebabkannya harus berhenti sampai saatpengemudi menginjak rem.
● Jarak Pengereman (Jhr) adalah jarak yang dibutuhkan untuk menghentikan kendaraan sejak pengemudi menginjak rem sampai kendaraan berhenti.
Jarak Pandang Henti (Jh) menggunakan rumus:
Jh = Jht + Jhr……….………..(2.22) Jh = (Jht = 𝑉𝑅
3,6T) + (Jhr = Vr.3,6
2.𝑔.𝑓𝑝) ……….…….(2.23)
Keterangan :
𝑉𝑅 = kecepatan rencana (km/jam)
T = waktu tanggap, ditetapkan 2,5 detik
g = percepatan gravitasi, ditetapkan 9,8 m/det2
fp = koefisien gesek memanjang antara ban kendaraan dengan perkerasan jalan aspal, ditetapkan 0,28–0,45 menurut AASHTO, fp akan mengecil jika kecepatan (VR) semakin tinggi dan sebaliknya menurut Bina Marga fp = 0,35– 0,55.
Untuk jalan datar : Jh = 0,278.𝑉𝑅. 𝑇+ 𝑉𝑅2
254.𝑓𝑝………..……….(2.24)
Untuk jalan dengan kelandaian tertentu : Jh = 0,278.𝑉𝑅 . 𝑇 + 𝑉𝑅2
254 (𝑓𝑝±𝐿)………....…….(2.25)
L = kelandaian jalan dalam (%) dibagi 100
Veren Nurlin Nabilah 2.2.5.2 Jarak Pandang Menyiap
Jarak Pandang Menyiap adalah jarak yang memungkinkan kendaraan menyiap kendaraan lain di depannya dengan aman hingga kendaraan tersebut kembali pada jalurnya semula. Jarak pandang menyiap diukur berdasarkan asumsi bahwa tinggi mata pengemudi adalah 105 cm ( 50 cm tinggi Jok dan 55 cm tinggi mata orang posisi duduk) dan tinggi halangan adalah 105 cm.
Jm = d1 + d2 + d3 + d4……….(2.26) Dimana :
d₁ = Jarak yang ditempuh selama waktu tanggap (m).berdasarkan waktu PIEV.
d₂ = Jarak yang ditempuh selama menyiap sampai kembali ke jalur semula (m).
d₃ = Jarak antara kendaraan yang menyiap dengan kendaraan yang datang dari arah berlawanan setelah proses menyiap selesai (m), antara 30 – 100 meter.
d₄ = Jarak yang ditempuh oleh kendaraan yang datang dari arah berlawanan, yang besarnya diambil sama dengan 2/3 d₂ (m)
2.2.6 Perhitungan Kebebasan Samping 2.2.6.1 Berdasarkan Jarak Pandang Henti
Berdasarkan jarak pandang henti, nilai kebebasan tikungan (m) diperoleh dengan rumus:
𝑚 = 𝑅′(1−𝑐𝑜𝑠90.𝑔.ℎ
𝜋𝑅′ )……….………(2.27)
Dimana
𝑅′ = 0,25. 𝑅. 𝑤………....(2.28) 𝐿′ = 𝐿𝑠………..………..(2.29) 2.2.6.2 Berdasarkan Jarak Pandang Menyiap
Berdasarkan jarak pandang menyiap, nilai kebebasan tikungan dapat diperoleh dengan rumus :
𝑚 = 𝑅′(1 − 𝑐𝑜𝑠𝜃 + 0,5(𝐽𝑑 − 𝐿𝑡)………..…..(2.30) Jika jarak Jh < Lt
𝐸 = 𝑅 [1 −𝑐𝑜𝑠(90−𝐽ℎ)
𝑇𝑖.𝑅 ]………(2.31)
Jika Jh > Lt
𝐸 = 𝑅 [1− 𝑐𝑜𝑠(90−𝐽ℎ)
𝑇𝑖.𝑅 ]+ 0,5 (Jh-Lt).sin (90𝐽ℎ)
𝑇𝑖.𝑅 ………...….(2.32) dimana :
R = Jari-jari tikungan (m) R’ = Jari-jari sumbu lajur dalam (m) Jh = Jarak pandang henti (m)
Lt = Panjang tikungan (m)
Penentuan lebar jalur dan bahu jalan dapat dilihat pada tabel 2.5
Veren Nurlin Nabilah
Tabel 2.5 Penentuan lebar Jalur dan Bahu Jalan Lokal Minimum Lebar bahu (m) 1,0 1,0 - - Keterangan : **) mengacu persyaratan ideal *) 2 jalur terbagi, masing-masing 2n x 3,5 m Dimana n = jumlah lajur per jalur - tidak ditentukan
Lebar jalur (m) 4,5 6,0 - -
Ideal Lebar bahu (m) 1,0 1,5 - -
Lebar jalur (m) 6,0 7,0 - -
Kolektor Minimum Lebar bahu (m) 1,0 1,5 - -
Lebar jalur (m) 4,5 6,0 **) **)
Ideal Lebar bahu (m) 1,5 1,5 2,0 2,0
Lebar jalur (m) 2,0 7,0 2,0 2n,35* )
Arteri Minimum Lebar bahu (m) 1,0 1,5 2,0 2,0
Lebar jalur (m) 4,5 6,0 7,0 2 x 7,0*)
Ideal Lebar bahu (m) 1,5 2,0 2,0 2,5
Lebar jalur (m) 6,0 7,0 7,0 2n3,5 *)
VLHR <300 300-10000 10000- 25000 >25000
2.2.7 Galian dan Timbunan
Dalam perencanaan suatu trase jalan, tidak mungkin membuat jalan langsung dengan tanah asli. Harus membuat galian atau timbunan sehingga didapat elevasi yang sesuai rencana.
Pekerjaan galian dilakukan jika elevasi rencana lebih rendah daripada elevasi tanah asli. Dalam melakukan pekerjaan galian dan timbunan diusahakan seimbang dan hanya terjadi sesedikit mungkin timbunan.
Total galian dan timbunan yang dibuat dapat dilihat dari gambar long profile dan volumenya dapat dihitung melalui trase jalan. Dengan mengetahui luas masing- masing pekerjaan baik galian ataupun timbunan dapat dicari volume jalan atau timbunan dengan mengalikan dengan rerata luasan galian atau timbunan antara 2 tipikal cross section dengan jaraknya. Dengan demikian, volume galian atau timbunan yang harus dilakukan dalam pembuatan jalan tersebut.
Langkah-langkah untuk menghitung volume galian dan timbunan : 1. Mencari elevasi titik-titik yang diperlukan
2. Mencari tinggi kap pias (h netto) Untuk bagian perkerasan / badan jalan
ℎ 𝑛𝑒𝑡𝑜 = ℎ 𝑏𝑟𝑢𝑡𝑜 ± 𝑡𝑒𝑏𝑎𝑙 𝑝𝑒𝑟𝑘𝑒𝑟𝑎𝑠𝑎𝑛 (20 𝑚𝑚)………....(2.33) Untuk bahu jalan
ℎ 𝑛𝑒𝑡𝑜 = ℎ 𝑏𝑟𝑢𝑡𝑜 ± 𝑡𝑒𝑏𝑎𝑙 𝑏𝑎ℎ𝑢 𝑗𝑎𝑙𝑎𝑛……….(2.34) 3. Mencari luas total
4. Mencari volume antar sectum 𝑣𝑜𝑙𝑢𝑚𝑒 =⊥𝑆𝑡𝑎 𝑎𝑤𝑎𝑙 + ⊥𝑆𝑡𝑎 𝑎𝑘ℎ𝑖𝑟
2 + 𝑗𝑎𝑟𝑎𝑘 𝑎𝑛𝑡𝑎𝑟 𝑠𝑡𝑎𝑡𝑖𝑜𝑛………….(2.35)
Veren Nurlin Nabilah Gambar 2.20 Pias potongan melintang untuk galian
Gambar 2.21 Pias Potongan Melintang Untuk Timbunan
Jika dalam jarak antar stasiun yang ditinjau ada galian dan timbunan maka dihitung sendiri dan baru dijumlahkan.
𝑣𝑜𝑙𝑢𝑚𝑒 𝑔𝑎𝑙𝑖𝑎𝑛 = ⊥ 𝑆𝑡𝑎 𝐴 2 × 𝑥 𝑣𝑜𝑙𝑢𝑚𝑒 𝑡𝑖𝑚𝑏𝑢𝑛𝑎𝑛 =𝐿 × ⊥ 𝑆𝑡𝑎 𝐵
2 × (𝐿 − 𝑥) 𝑣𝑜𝑙𝑢𝑚𝑒 𝑡𝑜𝑡𝑎𝑙 = 𝑣𝑜𝑙𝑢𝑚𝑒 𝑔𝑎𝑙𝑖𝑎𝑛 + 𝑣𝑜𝑙𝑢𝑚𝑒 𝑡𝑖𝑚𝑏𝑢𝑛𝑎𝑛
2.2.8 Stationing
Stasioning pada tahap perencanaan adalah memberikan nomor pada interval tertentu dari awal pekerjaan. Nomor jalan (sta jalan) dibutuhkan sebagai sarana komunikasi untuk dengan cepat mengenali lokasi yang sedang dibicarakan.
Selanjutnya menjadi panduan untuk lokasi tempat. Disamping itu, dari penomoran jalan tersebut diperoleh informasi tentang panjang jalan secara keseluruhan. Setiap sta jalan dilengkapi dengan gambar-gambar melintangnya.
Nomor jalan ini sama fungsinya dengan patokan di sepanjang jalan, perbedaannya:
1. Patokan merupakan petunjuk jalan yang diukur dari pojok kiri yang umumnya terletak di ibukota provinsi atau kotamadya. Sedangkan pada sta merupakan penunjuk jalan yang diukur dari awal pekerjaan (proyek) sampai dengan akhir.
2. Patok kiri merupakan patok permanen yang dipasang dengan ukuran standar yang berlaku patok sta merupakan patok sementara selama awal pelaksaan proyek tersebut.
2.2.8.1 Metode Penomoran
Sta jalan dimulai dari 0+000 m yang artinya 0 km dan 0 m dari awal proyek.
Sta 10+250 m berarti lokasi jalan terletak sejauh 10 km dan 250 m dari awal proyek. Jika terjadi perubahan arah tangan pada alignment horizontal maupun vertikal, maka penomoran selanjutnya dilakukan:
1. Setiap 100 m pada medan datar 2. Setiap 50 m pada medan bukit
3. Setiap 25 m pada medan pegunungan
Pada tikungan, penomoran dilakukan pada seiap titik penting, jadi terdapat sta dititik, dan sta di titik TS, pada perhitungan jenis lingkaran sederhana sta titik TS, sta titik ST, serta titik St pada tikungan. Jenis spiral, busur lingkaran, spiral.
Veren Nurlin Nabilah Contoh penomoran pada tikungan:
Sta TC= Sta A = α1 - T Sta CT= Sta TC + LC Sta TS= Sta (T + (d2-T-T1)) Sta SC= Sta TS + Ls Sta CS= Sta SC + Lc Sta ST= Sta CS + Ls
Contoh pe
Contoh perhitungan kelandaian melintang:
Elevasi = 125 + 2,02 = 127,02 m
100 m di sebelah kiri
2,5 m y1
1,5 m 6,3 m
y2 = 1,1 m
Elevasi = 125 + 1,1 = 126,1 m Maka,
=
=
= 0,92
Kelandaian melintang (i) = = 0,92
200— 100%
= 0,46%
2,5 m
6,4 m 1,8 m
Veren Nurlin Nabilah
Gambar 2.22 Diagram alir pengerjaan geometri jalan raya