Accelerating the world's research.
Laporan Resmi Praktikum Eksplorasi Magnetik
Bayu Tambak Samudra
Related papers
Laporan Resmi Praktikum Eksplorasi Magnetik ( A ) Raden Aldi Kurnia W ( 3712100011 eka agustina
PEMODELAN DUA DIMENSI MENGGUNAKAN RESIDUAL ANOMALI MAGNET IK LOKASI SAINS CENT ER DI … Jehunias L E O N I D A S Tanesib
ANALISIS SEBARAN PASIR BESI BERDASARKAN DATA MAGNET IK (ST UDI KASUS DUSUN SUNGAI T OPO … M Irvan
Download a PDF Pack of the best related papers
Laporan Resmi
Praktikum Eksplorasi Magnetik ( A )
Disusun oleh :
Raden Aldi Kurnia W ( 3712100011 ) Satrio Budiharjo ( 3712100009 ) Raden Bagus Fauzan I ( 3712100010 ) Ridho Fahmi Alifudin ( 3712100013 ) Bayu Tambak Samudra ( 3712100016 ) Gigih Prakoso W ( 3712100023 ) Yosar Fatahillah ( 3712100027 )
Muhazzib ( 3713100041 )
Jurusan Teknik Geofisika
Fakultas Teknik Sipil dan Perencanaan Institut Teknologi Sepuluh Nopember
2015
ABSTRAK
Telah dilakukan pengukuran magnetik dengan menggunakan Magnetometer jenis Proton Precission Magnetometer di belakang Bundaran ITS, di depan Jurusan D3 Mesin ITS dengan koordinat 697811, 9194983 UTM. IGRF lokal daerah ITS adalah sebesar 57070 nT. Teknik yang digunakan adalah dengan menggunakan Base Station yang tetap lalu pengukuran dilakukan sebanyak 10 titik tiap line hingga line ke-10. Jarak yang digunakan setiap ine nya adalah 54 m sehingga luasan yang dipetakan adalah 54X54 m2. Pada pengukuran geomagnet ini, yang diukur adalah Kuat medan magnet (H), namun data yang digunakan untuk processing adalah ∆H dari koreksi Higrf dengan H diurnal. Pengukuran ini dilakukan untuk memisahkan anomali lokal dengan anomali regional daerah setempat dengan menggunakan upwarding continuation. Tujuan utamanya adalah untuk menentukan anomali regional setempat dengan menggunakan software Magpick dan Surfer. Anomali yang dimaksudkan adalah pipa bawah tanah yang berada pada lokasi setempat. Pada pengukuran geomagnet ini diperlukan waktu 12 menit tiap line. Sedangkan untuk hasil rata-rata ∆H yang dihasilkan tiap titik adalah mendekati 24000 nT.
Kata Kunci : Anomali Magnetik, Base station, IGRF, Intensitas Medan Magnet, Proton Precission Magnetometer
BAB I
PENDAHULUAN
1.1. Latar Belakang
Geofisika merupakan bagian dari ilmu bumi dengan menggunakan prinsip fisika.
Geofisika digunakan untuk mengetahui kondisi bawah permukaan bumi yang melibatkan pengukuran permukaan dari parameter fisika yang dimilki oleh batuan yang ada di bawah permukaan bumi. Metode fisika umumnya dibagi menjadi metode aktif dan pasif. Metode aktif adalah suatu metode yang dilakukan dengan membuat medan buatan kemudian mengukur resons yang dilakukan oleh bumi. Sedangkan metode pasif adalah suatu metode yang digunakan untuk mengukur medan alami yang dipancarkan oleh bumi. Dalam hal ini medan buatan adalah suatu getaran atau gelombang yang dapat menimbulkan suatu respon seperti ledakan dinamit, dan pemberian arus listrik.
Metode magnetic sendiri adalah salah satu metode pasif dimana prinsip kerjanya adalah bahwasanya Bumi memiliki medan magnetik yang disebut dengan geoaxial magnetic field. Metode ini digunakan dalam teknik geofisika yang berdasarkan anomaly geomagnetic yang diakibatkan oleh perbedaan kontras suseptibilitas atau permeabilitas magnetic jebakan dari daerah magnetic di sekelilingnya. Pengukuran medan magnet bumi ini memiliki beberapa tujuan diantaranya untuk mengetahui lokasi deposit mineral, situs arkeologi, material di bawah tanah, atau objek dibawah permukaan laut seperti kapal selam atau kapal karam dan lain sebagainya.
1.2. Rumusan Masalah
Adapun rumusan masalah dalam praktikum geomagnetik ini adalah sebagai berikut : a. Bagaimana menganalisa dan interpretasi data metode magnetic.
b. Bagaimana cara mengetahui struktur bawah permukaan bumi dengan menggunakan metode magnetic
c. Bagaimana mendapatkan anomali magnetik dan mengetahui persebaran anomali regional daerah pengukuran
d. Bagaimana cara memisahkan antara anomali regional dengan anomali lokal e. Bagaimana menentukan target pengukuran menggunakan geomagnetik 1.3. Tujuan
Tujuan dilaksanakannya praktikum dengan menggunakan metode magnet ini adalah : a. Untuk menganalisa daerah mana yang memiliki kuat medan magnet
b. Mahasiswa mampu menguasai software yang mendukung pengolahan data magnetik seperti Surfer, Magpick, dan Mag2dc
c. Untuk model struktur bawah permukaan daerah penelitian dan menentukan nilai anomali magnetik daerah tersebut
d. Memisahkan antara anomali regional dengan anomali lokal e. Untuk mencari target pengukuran
1.4. Manfaat
Adapun manfaat dari praktikum ini adalah :
a. Dapat menggunakan alat yang berhubungan dengan metode magnetic b. Dapat mengolah data menggunakan software Surfer, Magpic, dan Mag2dc
c. Dapat menginterpretasikan hasil yang didapat serta menjelaskan proses pengolahan data secara umum
d. Dapat mengetahui model struktur bawah permukaan daerah penelitian dan menentukan nilai anomali magnetik daerah tersebut
e. Dapat mencari target mengukuran dan dibuat modelnya
BAB II DASAR TEORI
2.1 Proton Precission Magnetometer (PPM)
PPM) yang digunakan untuk mengukur nilai kuat medan magnetik total. Sebagai pendukung, peralatan lain yang digunakan dalam survei magnetik adalah GPS. GPS digunakan untuk mengukur posisi titik pengukuran meliputi bujur, lintang, ketinggian, dan waktu. Hasil dari pengukuran geomagnetik adalah berupa profil atau peta kontur magnetik.
Pada umumnya peta anomali magnetik mempunyai pola yang kompleks. Berdasarkan hal tersebut maka interpretasi dalam metode magnetik relatif lebih sulit. Sebuah proton memiliki momentum sudut L dan momen magnetik M.
Gambar 2.1 Konsep PPM
Tingkat waktu merecharge momentum sudut samadengan torsi T. Jika the body memiliki momen magnetik, nilai torsi adalah :
T = M x B sehingga
dL/dt = M x B
Untuk proton ada hubungan mendasar antara momentum sudut dan momen magnetic. Berikut adalah hubungan dari keduanya:
M=eL/2mc sehingga
dL/dt=LxeB/2mc
Proton Precession Magnetometer adalah instrument geofisika yang digunakan untuk mengukur kekuatan medan magnet Bumi, pengukuran medan magnet Bumi ini bertujuan untuk mengetahui lokasi deposit mineral, situs arkeologi, material di bawah tanah, atau objek dibawah permukaan laut seperti kapal selam atau kapal karam dan lain sebagainya.
Prinsip kerja Proton Procession Magnetometer adalah dengan proton yang ada pada semua atom memintal atau berputar pada sumbu axis yang sejajar dengan medan magnet Bumi. Normalnya, proton cenderung untuk sejajar dengan medan magnet Bumi. Ketika subjek diinduksi medan magnet (dibuat sedemikian), maka proton dengan sendirinya akan menyesuaikan dengan medan yang baru. Dan ketika medan baru itu dihentikan maka proton akan kembali seperti semula yang sejajar dengan medan magnet Bumi. Saat terjadi perubahan kesejajaran, perputaran proton berpresesi, dan putarannya semakin melambat. Frekuensi pada saat presesi berbanding lurus dengan kuat medan magnet Bumi. Rasio Gyromagnetic proton adalah 0,042576 Hertz / nano Tesla. Sebagai contoh, pada area dengan kekuatan medan sebesar 57.780 nT maka frekuensi presesi menjadi 2460 Hz.
Komponen sensor pada proton precession magnetometer adalah tabung silinder yang berisi cairan penuh atom hidrogen yang dikelilingi oleh lilitan kabel. Cairan yang digunakan umumnya terdiri dari air, kerosin, dan alkohol. Sensor tersebut dihubungkan dengan kabel ke unit yang berisi sebuah power supply, sebuah saklar elektronik, sebuah amplifier, dan sebuah pencatat frekuensi.
Ketika saklar ditutup, arus DC mengalir dari baterai ke lilitan, kemudian memproduksi kuat medan magnet dalam silinder tersebut. Atom hidrogen (proton) yang berputar seperti dipol magnet, menjadi sejajar dengan arah medan (sepanjang sumbu silinder). Daya listrik kemudian memotong lilitan dengan membuka saklar. Karena medan magnet Bumi menghasilkan torsi (tenaga putaran) pada putaran atom hydrogen, maka atom hydrogen memulai presesi disekitar arah total medan Bumi. Presesi tersebut menunjukkan medan magnet dalam berbagai wktu (time-varying) yang mana menginduksi sedikit arus AC pada lilitan tersebut. Frekuensi pada arus AC memiliki persamaan dengan frekuensi presesi atom tersebut. Karena frekuensi presesi berbanding dengan kuat medan total dan karena konstanta perbandingan diketahui, maka kuat medan total dapat ditetapkan dengan akurat.
2.2 Pengambilan Data Geomagnetik
Dalam penelitian PPM yang digunakan berjumlah dua buah, satu sebagai rover dan satunya sebagai base station. PPM dapat digunakan untuk mengukur medan magnet gradien maupun medan magnet total. Pengukuran medan magnet gradien dengan menggunakan dua buah sensor dan medan magnet total dengan menggunakan satu buah sensor. Beberapa peralatan bantu lainnya adalah:
1. Theodolit, untuk menentukan arah lintasan titik-titik pengukuran di lapangan.
2. Kompas geologi, untuk menentukan arah utara sensor PPM dan membantu menentukan posisi supaya urut.
3. GPS, untuk menentukan posisi lintang dan bujur serta ketinggian
4. Meteran, untuk mengukur jarak grid. Dan Jam, untuk waktu pengambilan 5. Catatan lapangan, untuk mencatat hari, tanggal, jam, kondisi
Dalam melakukan akuisisi data magnetik yang pertama dilakukan adalah menentukan base station dan membuat station-station pengukuran (usahakan membentuk grid-grid).
Ukuran gridnya disesuaikan dengan luasnya lokasi pengukuran, kemudian dilakukan pengukuran medan magnet di station-station pengukuran di setiap lintasan, pada saat yang bersamaan pula dilakukan pengukuran variasi harian di base station.
Data-data yang dicatat dalam survei geomagnetik antara lain : 1. Waktu : meliputi hari, tanggal, jam
2. Data geomagnetik :
a). Medan total : minimal lima kali pengukuran pada tiap titik pengukuran untuk mengurangi gangguan lokal (noise)
b). Medan vertikal : dua orientasi yaitu utara-selatan dan timur-barat dengan masing- masing minimal lima kali pengukuran pada setiap titik pengamatan
c). Variasi harian
d). Medan utama bumi (IGRF) 3. Posisi titik pengukuran
4. Kondisi cuaca dan topografi lapangan
Pengumpulan data bergantung pada target dan kondisi lapangan. Pegukuran dengan target lokal biasanya dilakukan untuk daerah survei yang tidak terlalu luas, dengan spasi 50- 500 meter, sedang untuk target regional mencakup daerah yang lebih luas dengan spasi 1-5 km. Pengukuran di daerah gunung api, di puncak dan tubuh gunung dilakukan dengan spasi 0,5 km atau sekitar 25-30 menit perjalanan (kaki), sedangkan pada kaki gunung dan sekitarnya spasinya 1-2 km. Untuk target dengan daerah yang sempit dan topografi yang relatif datar saat dilakukan dengan spasi 50-100 m bergantung kepada hasil pengukuran yang diinginkan. Pengumpulan data dilakukan pada titik yang telah diplotkan grid-nya. Variasi harian dapat diukur dengan menggunakan Base Statio PPM.
Pada prinsipnya, survei metode magnetik harus menggunakan 2 buah PPM yang berfungsi sebagai base dan rover. Base station untuk mengukur variasi harian yang akan dikoreksikan terhadap data yang terbaca di rover. Bila menggunakan 2 buah PPM, maka satu PPM dengan dipasang di tempat yang sama selama pengukuran yang berlaku sebagai base station dan dioperasikan secara otomatis merekam data medan magnet dengan selang waktu selama dua menit. Tujuan dari pemasangan base station ini adalah untuk mendapatkan data variasi harian.
Namun demikian, karena keterbatasan alat dan alasan nilai variasi harian yang cukup kecil, seringkali survei metode magnetik dilakukan hanya dengan 1 PPM, yang diperlukan sebagai rover Untuk mendapatkan koreksi variasi harian, maka pengambilan data dilakukan secara looping, dan nilai variasi harian seakan-akan seperti drift pada survei metode gravitasi.
2.3 Pengolahan Data Geomagnetik
Jika dua kutub magnet m1 dan m2 dipisahkan pada jarak r, besarnya gaya magnet yang timbul di antara keduanya diberikan oleh persamaan berikut :
Kuat medan magnet H didefinisikan sebagai gaya magnet per satuan kuat kutub magnet. Kuat medan magnet pada suatu titik yang berada pada jarak r dari kutub magnet m dapat dinyatakan sebagai :
Jika suatu bahan magnetik ditempatkan dalam medan magnetik H, bahan tersebut akan termagnetisasi. Intensitas magnetisasi (M) berkaitan dengan kuat medan magnetik melalui konstansta kesebandingan ks , yang dikenal sebagai suseptibilitas magnetik.
Hubungan intensitas magnetisasi dengan suseptibilitas magnetik diungkapkan dalam : M = kH
Berdasarkan respon suatu bahan terhadap medan magnetik luar, bahan magnetik dapat dikelompokkan ke dalam tiga jenis :
1. Diamagnetik, bahan diamagnetik mempunyai nilai suseptibilitas magnetik yang kecil.
Bahan diamagnetik memiliki arah magnetisasi yang berlawanan dengan arah medan magnetik luar sehingga bahan diamagnetik mempunyai nilai suseptibilitas magnetik negatif.
Suseptibilitas magnetik bahan diamagnetik tidak bergantung pada temperatur. Contoh mineral yang termasuk diamagnetik adalah bismuth, grafit, gipsum, marmer, kuarsa.
2. Paramagnetik, bahan paramagnetik memiliki nilasi suseptibilitas magnetik yang kecil dan positif. Arah magnetisasi dari bahan paramagnetik sama dengan dengan arah medan magnetik luar sehingga memiliki suseptibilitas magnetik positif. Nilai suseptibilitas magnetik bahan paramagnetik bergantung pada temperatur.
3. Ferromagnetik (termasuk ferrimagnetik, antiferromagnetik) Bahan ferromagnetik memiliki nilai suseptibilitas magnetik positif dan besar. Seperti halnya bahan paramagnetik, sifat kemagnetan bahan ferromagnetik dipengaruhi oleh temperatur. Contoh mineral yang termasuk diamagnetik adalah besi, nikel, kobalt.
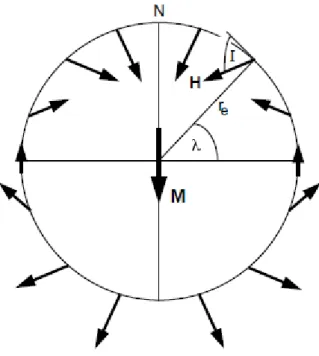
2.4 Medan Magnet Bumi
Berdasarkan hasil pengamatan variasi medan magnet bumi ada 2 macam :
1. Variasi sekular merupakan variasi yang ditimbulkan oleh adanya perubahan internal bumi.
Perubahannya bisa sangat lambat (orde puluhan sampai dengan ratusan) untuk dapat mempengaruhi hasil survei magnetik
2. Variasi diurnal (harian) merupakan variasi yang ditimbulkan secara dominan oleh gangguan matahari. Radiasi ultraviolet matahari menimbulkan ionisasi lapisan ionosfir, yang
menyebabkan adanya elektron-elektron yang terlempar dari matahari akan menimbulkan fluktuasi arus sebagai sumber medan magnet.
Berikut ini merupakan gambaran dari medan magnetik yang ada pada bumi.
Gambar 2.2 Medan geoaxial magnetik pada bumi
Sifat perubahan harian ini acak, tetapi secara periodik rata-rata selama 24 jam. Variasi lain adalah “badai magnetik”. Sumber penyebabnya sama yaitu akibat aktivitas matahari.
Perubahannya sangat cepat sehingga mengaburkan pengamatan. Medan magnet bumi terdiri dari tiga bagian, yaitu:
1.Medan Magnetik Utama Medan magnetik utama ini tidak konstan dalam waktu dan berubah relatif lamban dan asal perubahan dari perubahan internal dalam bumi, yang dapat dihubungkan dengan perubahan arus konveksi dalam inti, perubahan inti mantel, perubahan dalam laju perputaran bumi.
2. Medan Luar Merupakan bagian kecil medan utama, yaitu sisa 1% medan magnetik bumi, berasal dari luar bumi yang berhubungan dengan arus listrik yang mengalir dalam lapisan terionisasi atmosfir luar. Perubahan medan ini terhadap waktu jauh lebih cepat daripada medan permanen.
3. Anomali Magnetik Lokal Dekat permukaan kerak bumi merupakan penyebab perubahan dalam medan utama yang biasanya jauh lebih kecil dari medan utama, relatif konstan dalam waktu dan tempat. Perubahan ini dapat dihubungkan dengan perubahan kandungan mineral magnetik dalam batu-batuan dekat permukaan. Kadang-kadang anomali ini cukup besar sehingga besar medan menjadi dua kali lipat dibanding medan utama dangkal. Pada umumnya anomali ini tidak menyebar kedaerah luas karena sumbernya tidak terletak terlalu dalam.
Berdasarkan sifat medan magnet bumi dan sifat kemagnetan bahan pembentuk batuan, maka bentuk medan magnetik yang timbulkan oleh benda menyebabnya tergantung pada :
- Inklinasi medan medan magnet bumi sekitar anomali.
- Geometri benda anomali.
- Kecenderungan arah dipol magnet di dalam anomali.
- Orientasi arah dipol magnet terhadap arah medan bumi 2.5 Koreksi Data Anomali Magnetik
Ada beberapa cara yang dilakukan untuk mendapatkan hasil anomali magnetik. Cara yang dilakukan adalah dengan melakukan koreksi terhadap nilai intensitas magnet (H) yang didapatkan saat di lapangan. Cara yang digunakan adalah sebagai berikut ini.
2.5.1 Koreksi Diurnal ( Koreksi Harian
Koreksi diurnal (harian) dilakukan pada masing-masing titik pengukuran berdasarkan masing-masing line. Rumus yang digunakan pada koreksi diurnal adalah sebagai berikut :
Hd =
x (H base 2 – H base 1)
Contoh perhitungan koreksi diurnal adalah sebagai berikut pada line 1 dan titik 1 pengukuran :
Dik : t base 1 = 09.00 t line 1 = 09.01
selisih waktu t line 1 – t base 1 = 1 menit = 60 sekon t base 2 = 09.12
selisih waktu t base 2 – t base 1 = 12 menit = 720 sekon H base 2 = 20021,7 nT
H base 1 = 17578,4 nT Dit : Hd ?
Jawab :
Hd =
x (H base 2 – H base 1) Hd =
x (20021,7 – 17578,4) Hd = 203,6083333 nT
2.5.2 Perhitungan Anomali Magnetik
Setelah melakukan koreksi harian dan koreksi IGRF maka setelah itu dilakukan perhitungan nilai anomali magnet pada setiap titik pengukuran. Rumus yang digunakan yaitu sebagai berikut.
∆H = Hp – Higrf – Hd
Namun, untuk kasus pengukuran dengan menggunakan alat PPM (Proton Precission Magnetometer) Higrf sudah terkoreksi dengan alat yang digunakan sehingga perhitungan yang dilakukan untuk mendapatkan nilai anomali magentiknya sudah tidak melakukan pengurangan terhadap Higrf berdasarkan lokasi pengukuran atau regional setempat. Berikut ini merupakan rumusan yang digunakan.
∆H = Hp – Higrf – Hd
Contoh perhitungan anomali magnet pada line 1 di titik pengukuran 1 yaitu sebagai berikut :
Dik : Hp = 18543,2 nT Hd = 203,6083333 nT Dit : ∆H ?
Jawab :
∆H = Hp – Hd
∆H = 18543,2 – 203,6083333
∆H= 18399,592 nT 2.5.3 Koreksi IGRF
Koreksi IGRF dilakukan dengan cara menghitung nilai medan magnet titik pengukuran berdasarkan nilai yang sudah tertera pada IGRF (International Geomagnetic Reference Field). Pada praktikum ini langkah awal sebelum menentukan nilai medan magnet IGRF adalah mengubah koordinat UTM ke bentuk longitude dan latitude. Hal itu dikarenakan untuk menentukan nilai IGRF harus memasukkan koordinat dalam bentuk longitude dan latitude, sedangkan dari data yang di ambil koordinat posisi pengukuran dalam bentuk UTM. Cara yang digunakan untuk mengubah koordinat dari UTM pada lembar datasheet menjadi latitude dan longitude adalah dengan melakukan converting secara online pada website http://www.engineeringtoolbox.com/utm-latitude-longitude-d_1370.html.
Berikut ini merupakan gambaran penampakan dari website yang digunakan untuk converting data.
Gambar 2.3 Website converting dari UTM ke latitude dan longitude
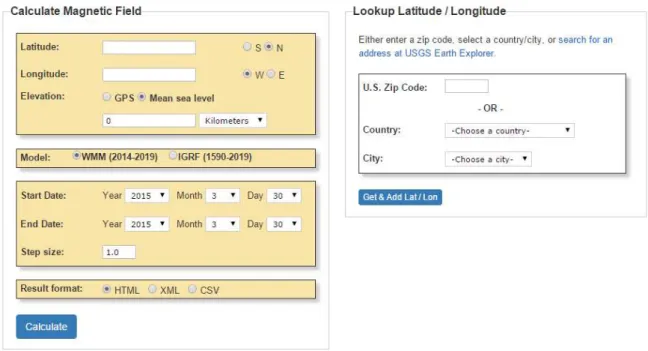
Setelah mendapatkan koordinat dalam bentuk latitude dan longitude maka memasukkan koordinat tersebut secara online pada website http://www.ngdc.noaa.gov/geomag-web/#igrfwmm . Perhitungan Higrf akan dilakukan secara otomatis oleh website yang tersedia, mengingat Higrf setiap bulan berubah maka digunakan waktu terakhir atau waktu paling baru pada kolom yang tersedia. Berikut ini merupakan salah satu contoh website yang digunakan dalam menentukan nilai IGRF yang sesuai dengan lokasi pengukuran geomagnetik.
Gambar 2. 4 Website Perhitungan Higrf
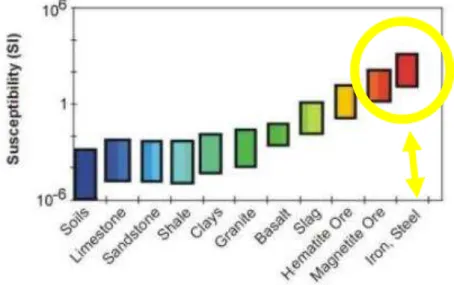
2.6 Suseptibilitas Pipa Besi
Pipa yang kami temukan pada daerah tenggara wilayah pengukuran merupakan pipa yang terbuat dari material besi. Pipa besi merupakan gabungan antara beberapa macam unsur-unsur kimia yang 98% nya merupakan unsur Ferum (Fe) atau besi, dan selebihnya merupakan unsur Karbon (C) dan unsur Oksigen (O). Adapun menurut sumber yang kami dapatkan dari Wightman, W.E (2003) besar nilai suskeptibilitas besi berada pada range 10 – 1000 SI (tak berdimensi) sesuai pada grafik berikut:
Gambar 2.5 Range nilai suskeptibilitas beberapa jenis material dan batuan. (Weightman W.E, 2003)
BAB III METODOLOGI
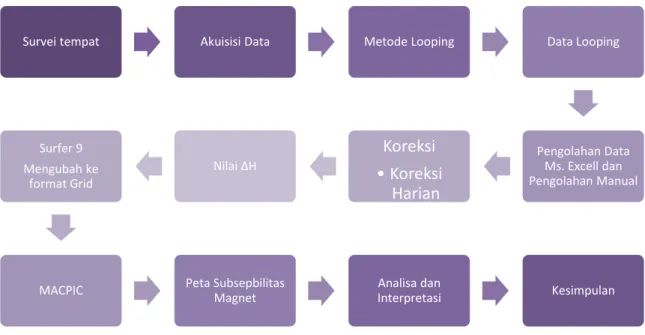
3.1. Skema Langkah Kerja Survei Geomagnetik
Berikut ini merupakan langkah kerja yang digunakan kelompok 2 dalam melakukan survei geomagnetik.
Gambar 3.1 Diagram alir cara kerja survei geomagnetik
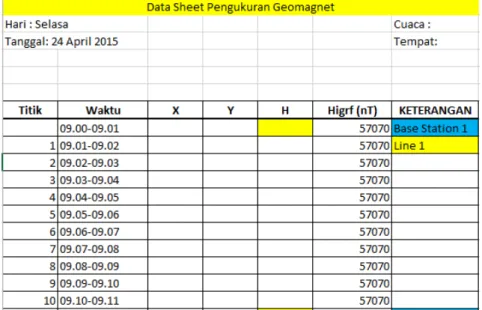
Sedangkan untuk datasheet yang digunakan untuk survei magnetik adalah sebagai berikut ini.
Gambar 3.2 Datasheet pengukuran geomagnetik
Survei tempat Akuisisi Data Metode Looping Data Looping
Pengolahan Data Ms. Excell dan Pengolahan Manual
Koreksi
•Koreksi Harian
•Koreksi IGRF
Nilai ∆H Surfer 9
Mengubah ke format Grid
MACPIC Peta Subsepbilitas
Magnet
Analisa dan
Interpretasi Kesimpulan
3.2. Lokasi Survei Geomagnet
Berikut ini merupakan gambaran lokasi survei geomagnetik dari kelompok 2 jika koordinat UTM yang didapatkan dari GPS di plot pada Google Earth.
Gambar 3.3 Lokasi survei geomagnetik
Survey Magnetik yang kami lakukan bertempat pada daerah depan bundaran Institut Teknologi ITS. Dengan luas area survey geomagnet mencapai 2.916 m2 dengan detail panjang dan lebar senilai 54 m x 54 m. Spasi tiap titik pengukuran yang dilakukan sebesar 6 meter, sehingga untuk luas lahan dan spasi pengukuran tersebut diperoleh data 100 titik pengukuran. Penempatan Base Station ditempatkan sejauh 25 meter kearah Utara lokasi pengukuran, hal tersebut dilakukan karena daerah tersebut minim gangguan (jalan raya, dll).
Berikut ditampilkan koordinat tiap titik pengukuran tiap line.
Gambar 3.4 Koordinat tiap line 3.3. Alat dan Bahan
Dalam survey Geomagnet yang dilakukan, maka diperlukan sejumlah peralatan yang digunakan untuk pengukuran, adapun alat dan bahan ialah sebagai berikut:
a) Seperangkat Magnetometer PROTON ENVI SCITREX atau Proton Precission Magnetometer (PPM)
b) GPS, untuk menentukan koordinat tiap titik serta ketinggian lokasi penelitian.
c) Kompas, untuk menentukan arah Utara sensor PPM dan menentukan posisi supaya urut.
d) Meteran, untuk mengukur panjang lintasan.
e) Tali Rafia, untuk ketetapan spasi 6 meter
f) Worksheet, untuk mencatat hari, tanggal, jam, kondisi cuaca dan lingkungan saat pengambilan data, serta mencatat data hasil pengukuran PPM.
3.4. Metode Pengukuran
Metode pengukuran yang dilakukan ialah menggunakan konsep Looping. Pengukuran dengan Metode Looping dimulai dari base dan diakhiri di base lagi. Pengukuran Looping ini hanya menggunakan satu alat Magnetometer, sehingga setiap satu line dengan durasi waktu tertentu (12 menit), alat magnetometer harus kembali lagi ke base.
Gambar 3.5 Teknik looping dalam pengukuran geomagnetik
Metode Looping ini sekaligus mencatas nilai variasi harian (diurnal) dan intensitas magnet total dengan noise yang terkecil, diharapkann kurang dari 20%. Data-data yang dicata dlam survey geomagnetic antara lain ialah :
1) Waktu
2) Data Geomagnetik
Medan Total : Minimal 3 kali pengukuran untuk tiap pengukuran untuk mengurangi gangguan lokal (noise).
Variasi Harian
Medan Magnet Utama Bumi 3) Posisi Titik Pengukuran
3.5. Perhitungan Data
Datasheet lengkap kelompok 2 saat survei geomagnet Hari Selasa tanggal 24 Maret 2015 dengan lokasi yang berada di belakang bundaran ITS adalah sebagai berikut ini.
Gambar 3.6 Tabel nilai H yang diperoleh dari pengukuran
Sedangkan untuk perhitungan nilai anomali magnetiknya digunakan beberapa koreksi seperti koreksi harian atau diurnal, koreksi IGRF (namun pada survei ini tidak peru dilakukan karena alat sudah dengan sendirinya melakukan koreksi IGRF), dan perhitungan anomali magneti dengan menggunakan cara yang ada pada subbab 2.5 diatas. Berikut ini adalah data yang didapatkan dari berbagi perhitungan diatas.
Gambar 3.7 Tabel perhitungan anomali magnetik tanpa pengaruh Higrf
Jika data pada gambar 4.1 dan 4.2 menggunakan X dan Y yaitu koordinat dalam UTM, maka berikut ini merupakan datasheet anomali manetik tiap jarak dalam 6 meter pengukuran :
Gambar 3.8 Tabel perhitungan anomali magnetik berdasarkan jarak
3.6. Pengolahan Data Geomagnetik 3.6.1 Mengubah Data menjadi Grid
Untuk mengubah data lapangan magnetic yang sudah dikoreksi oleh data magnetic igrf, menggunakan software surfer untuk mengolah data mentah (excel) yang berisi data koordinat dan nilai magnetic pada titik tersebut, kemudian menggunakan surfer dimasukkan data tersebut pada worksheet,
Gambar 3.9 Data Worksheet Magnetik pada Surfer
Kemudian data ini safe sebagai .bln, lalu untuk membuat suatu kontur dari file .bln ini buka pada lembar plot, grid->data lalu pilih file .bln yang sudah kita buat pada lembar worksheet dan akan muncul proses seperti pada gambar
Gambar 3.10 Laporan Proses Grid
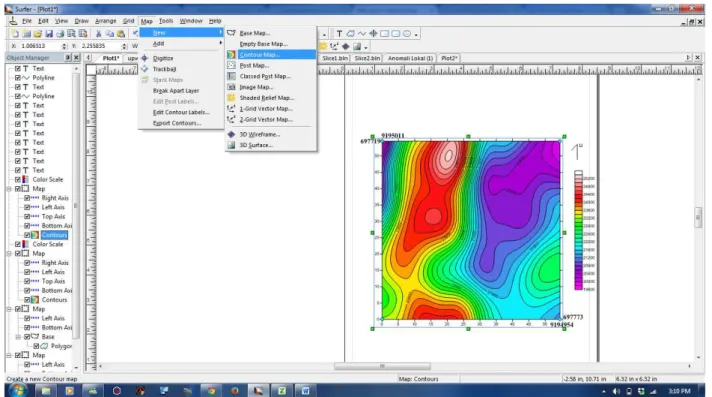
Menu diatas menunjukkan bahwa proses grid selesai dan bisa dilanjutkan untuk dibuka pada program magpick untuk diolah lebih lanjut. Adapun jika ingin melihat hasil kontur .grd ini dengan menggunakan toolbar sebagai berikut :
Gambar 3.11 Menu membuat kontur (New Contour Map)
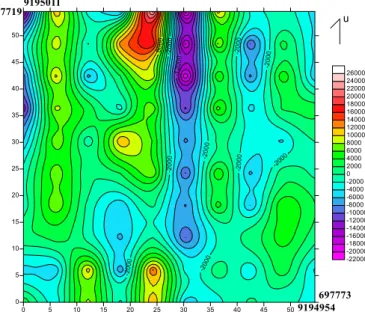
Lalu pilih file .grd yang sudah dibuat, dan akan terbuat kontur magnetic yang masih belum di sempurnakan dengan hasil akhir :
Gambar 3.12 Kontur magnetic awal
Kemudian setelah memastikan data grid yang sudah kita masukkan benar, maka proses selanjutnya bisa dilanjutkan yaitu membuat anomaly regional yang akan dilakukan menggunakan software magpick.
3.6.2. Pengolahan Data pada Magpick
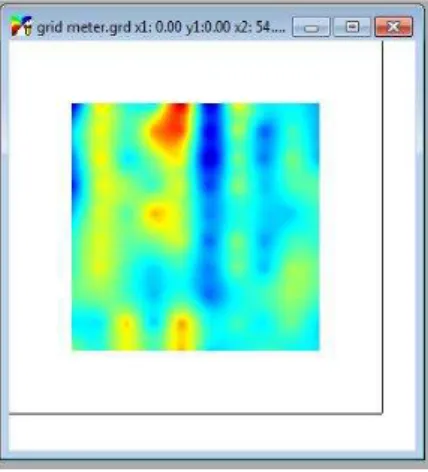
Data hasil pengukuran yang sudah dirubah dalam fomat grid kemudian dibuka pada software Magpick untuk melakukan kontinusitas keatas sehingga didapatkan anomali regional dan anomali lokal. Data yang ditampilkan dilapangan seperti gambar dibawah.
Gambar 3.13 Data suseptibilitas magnetik hasil pengukuran dilapangan
Untuk mendapatkan gambaran yang lebih baik, dapat dilakukan dengan meningkatkan resolusi dengan fungsi Bi-linear.
Gambar 3.14 Cara peningkatan resolusi gambar
Gambar 3.15 Data suseptibilitas magnetik hasil pengukuran dilapangan yang telah ditingkatkan resolusinya
Kemudian dilakukan kontinuitas keatas dengan menggunakan fungsi operations upward continuation pada software Magnetic.
Gambar 3.16 Fungsi upward continuation
Gambar 3.17 Tabel untuk melakukan kontinuitas keatas
Pada table diisi nilai kontinuitas ke atas pada kolom evaluation dari 3 sampai 19.
Kemudian didapatkan hasil anomali regional yang hampir sama antara 18 dengan 19 terlihat seperti gambar dibawah, ditambah dengan evaluation 17 sebagai pembanding.
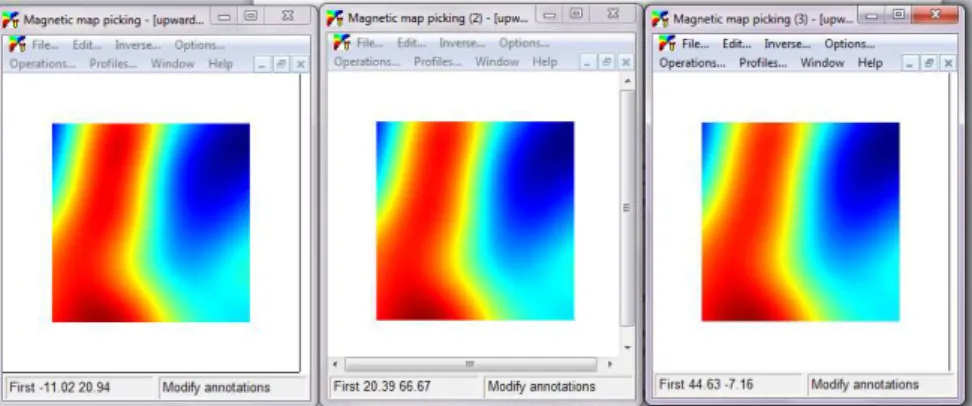
Gambar 3.18 Anomali regional dengan nilai evaluation 17 (kiri), 18 (tengah), dan 19 (kanan) Dari gambar diatas kami mengambil nilai pada evaluation 18 karena bentuk anomali regionalnya hampir sama dengan evaluation 19. Sedangkan untuk evaluation 17 masih ada perbedaan yang mencolok apabila dibandingkan dengan evaluation 18. Kemudian dilakukan koreksi kutub.
3.6.3 Koreksi Kutub pada Magpick
Koreksi Kutub atau istilah lainnya adalah reduksi ke kutub adalah salah satu koreksi anomali magnetik yang dilakukan untuk memudahkan saat proses interpretasi. Cara yang dilakukan adalah dengan cara mengubah sudut deklinasi menjadi 90 derajat dan inklinasi menjadi 0 derajat. Berikut ini merupakan gambaran umum contoh dari koreksi kutub.
Gambar 3.19 Proses Reduksi Kutub
Dari gambar diatas dapat dilihat bahwa kurva kiri menunjukkan data sebelum koreksi kutub dan sebelah kanan gambar setelah dilakukan koreksi kutub. Dapat dilihat perbedaan smooting kurva yang dihasilkan. Berikut ini langkah-langkah yang dilakukan dalam software magpick 2D.
Gambar 3.20 Window Reduction to the pole
Pada gambar diatas, nilai main field untuk D dan I nya didapatkan dari IGRF yang ada pada website yang telah dijelaskan tadi. Setelah dimasukkan nilai inklinasi dan deklinasi
sesuai sudut diatas, maka dimasukkan pula nilai deklinasi dan inklinasi 90 dan 0 derajat. Dari data tersebut, maka data yang dihasilkan adalah sebagai berikut.
Gambar 3.21 Pemilihan tool Reduction to the pole
Gambar diatas ini merupakan gambaran hasil pengukuran anomali magnetik sebelum dilakukan koreksi kutub. Sehingga jika dilakukan koreksi kutub, maka hasil yang didaptkan adalah seperti ini.
Gambar 3.22 Tampilan gambar setelah dilakukan koreksi kutub
Dari gambar diatas dapat diamati bahwa perbedaan antara gambar sebelum dikoreksi IGRF dengan yang sudah dikoreksi adalah tidak mengalami perbedaan yang significan.
Dalam hal ini berarti pengukuran yang dilakukan telah sesuai dengan prosedur yang dilakukan.
3.6.4. Slicing Data Magnetik pada Software Surfer
Setelah mendapatkan anomaly regional dengan menggunakan software magpick, kemudian dilakukan slicing pada data .grd yang sudah di olah agar diketahui bentuk 2D magnetic pada garis/slice yang diterapkan pada peta anomaly, slice dilakukan dua kali secara menyilang. Untuk menslice suatu data pertama kita harus digitasi daerah yang ingin kita slice terlebih dahulu, caranya adalah :
Gambar 3.23 Digitasi pada Surfer
Kemudian mendigit daerah yang ingin dislice, adapun daerah yang di slice seperti pada gambar :
Gambar 3.24 Kuning : Slice 1, Coklat : Slice 2
Kemudian untuk slicing menggunakan toolbar berikut,
Gambar 3.25 Toolbar Slicing
Kemudian pilih file .grd hasil dari magpick (upward) dan file hasil digitasi, lalu save sebagai .DAT. Lalu buka file .DAT yang sudah dibuat pada lembar worksheet, kemudian akan tampil tampilan data sebagai berikut :
Gambar 3.26 Tampilan data slicing
Pada kolom A paling atas menunjukkan jumlah data (45 data pada hasil slicing), Apabila hasil slicing diinginkan mempunyai fill (isi berupa warna) maka data diatas ditambahkan pada akhirnya,
Gambar 3.27 Menambahkan opsi fill
Di kolom A yang terakhir isikan nilai terakhir pada kolom A lalu pada kolom B masukkan nilai terkecil, lalu pada kolom A yang selanjutnya isikan nilai nol (0) dan kolom B nilai terkecil, terakhir kolom A diisikan nilai nol (0) dan nilai pertama pada kolom B.
Kemudian jumlah data diganti menjadi 48 (sesuai jumlah data setelah ditambah opsi fill).
Lalu setelah menerapkan cara ini grafik hasil slicing dapat di beri fill. Kemudian data slicing tersebut di save sebagai format file .bln, dan dibuka pada plot sebagai base map, sehingga didapatkan hasil slicing pertama adalah sebagai berikut :
Gambar 3.28 Slicing pertama
Dan slicing kedua adalah seperti berikut :
Gambar 3.29 Slicing Kedua 3.7 Modelling Menggunakan mag2dc
Pada tahap ini pengolahan menggunakan software mag2dc (modelling)Sebelum membuat model, pertama kali yang harus dilakukan adalah menginput data magnetic kedalam filet .dat yang dilakukan menggunakan software surfer, namun sebelum menginput data harus menentukkan beberapa parameter fisis model sesuai dengan kebutuhan,
Gambar 3.30 Input model parameter
Kemudian menginput data yang sudah berformat file .dat yang ditunjukkan pada windows seperti akan ditampilkan pada gambar windows berikut,
Gambar 3.31 Proses Input Data
Dimana pada data yang digunakan diatas kolom pertama merupakan informasi posisi (dalam meter) dan pada kolom kedua merupakan informasi magnetic yang di dapat dari hasil slicing (dalam nT), lalu setelah menginput data dilakukan pembuatan model, misal seperti yang ditampilkan pada gambar dibawah ini :
Gambar 3.32 Pembuatan Model
Kemudian mencocokkan kurva pemodelan dengan kurva magnetic yang merupakan hasil dari pengukuran data, dengan mengubah parameter-parameter fisis dari model yang kita buat, atau merubah posisi, dan ukuran dari model, yang bisa dilakukan pada menu berikut
Figure 3.33 Menu pengeditan model
Pada menu tersebut kita dapat menentukkan parameter, dan mengubah posisi :
Gambar 3.34 Edit Parameter
Atau mengubah bentuk model sesuai dengan kebutuhan dan juga kita dapat menambahkan model seperti berikut :
Gambar 3.35 Menambahkan body model
Hal tersebut dilakukkan hingga kurva antara hasil data dan hasil modelling cenderung sama dan error (misfit) kecil :
BAB IV PEMBAHASAN
4.1 Pembahasan Awal
Pengukuran dilaksanakan di depan kampus jurusan D3 Teknik Mesin, dan dibelakang bundaran/ gerbang utama ITS. Kuat medan magnet H IGRF 57070 dimulai pada pukul 09.00 pagi hingga pukul 11.40 tanggal 24 Maret 2015. Lama durasi pengukuran diminimalisasi agar pengukuran tidak sampai pada kisaran waktu pukul 12.00 untuk menghindari adanya badai elektromagnetik di waktu siang saat terjadi terik matahari. Cuaca lapangan cerah, dengan suhu udara berkisar antara 26 – 34 derajat Celcius, terdapat genangan air dan tanah berlumpur pada bagian barat lapangan observasi – di lintasan 7 - 10.
Dengan metode pengukuran medan magnetik Looping, grid yang digunakan antara masing-masing titik pengukuran sebesar 6 meter. Penentuan titik pengukuran didesain sedemikian rupa untuk mendeteksi keberadaan pipa logam yang diprediksi memiliki kedalaman hingga 2 meter dibawah permukaan tanah. Adapun grid sebesar 6 meter itu sendiri dipilih untuk mendeteksi anomali akibat pipa logam tersebut yang diperkirakan berada pada kedalaman 1/3 x 6 meter = 2 meter. Pipa dan kabel bawah tanah yang dijadikan sebagai target pada titik sounding berada di tenggara dan di barat wilayah observasi.
Base station pada pengukuran kali ini berlokasi di bagian timur dengan jarak 25 meter dari titik pengukuran terdekat. Adapun fungsi base station itu sendiri merupakan base dimana pengukuran kuat medan magnetik diukur setiap selesai pengukuran pada masing-masing lintasan. Adapun durasi optimal untuk kembali mengukur pada base station yang kami tentukan adalah setiap 12 menit. Masing-masing lintasan memiliki panjang 50 meter, dan jumlah lintasan sebanyak 10 lintasan. Pengukuran dimulai pada lintasan-1 yang berlokasi di bagian paling timur wilayah observasi mengarah ke utara agar menghasilkan pengukuran yang tegak lurus/ cross dengan arah lintasan pipa ke barat laut..
Pengukuran di lapangan dilaksanakan oleh empat orang personil. Personil pertama bertugas untuk menentukan lokasi selanjutnya untuk mengukur dan melakukan orientasi medan agar Proton Precission Magnetometer oleh personil kedua dihadapkan ke arah utara dengan menggunakan kompas sesuai prosedur pengukuran. Personil pertama ini diikatkan dengan tali rafia dengan personil kedua agar jarak 6 meter terus dapat terjaga. Adapun personil ketiga bertugas untuk mencatat hasil pengukuran dan personil keempat bertugas untuk mencatat koordinat lokasi pengukuran. Dengan cara demikian maka lama durasi pengukuran dapat dikurangi serta waktu optimal untuk kembali ke pengukuran base station dapat dipenuhi.
Pengukuran magnetik ini menggunakan 1 base station, 100 titik pengamatan dengan interval titik pengamatan sebesar 6 m. Setelah didapat nilai medan magnet (H) setiap line, kami hitung nilai error tiap line.
Gambar 4.1 Line 1
Gambar 4.2 Line 2 y = -304,95x + 22439
R² = 0,0627
0 5000 10000 15000 20000 25000 30000
0 5 10 15
nilai H
titik pengukuran
line 1
trendline 1 Linear (trendline 1)
y = -417,3x + 24874 R² = 0,1124
0 5000 10000 15000 20000 25000 30000
0 5 10 15
nilai H
titik pengukuran
line 2
trendline 2 Linear (trendline 2)
Gambar 4.3 Line 3
Gambar 4.4 Line 4 y = -285,57x + 21182
R² = 0,0715
0 5000 10000 15000 20000 25000 30000
0 5 10 15
nilai H
titik pengukuran
line 3
trendline 3 Linear (trendline 3)
y = 517,46x + 18670 R² = 0,2922
0 5000 10000 15000 20000 25000 30000
0 5 10 15
nilai H
titik pengukuran
line 4
trendline 4 Linear (trendline 4)
Gambar 4.5 Line 5
Gambar 4.6 Line 6 y = -213,25x + 20902
R² = 0,0651
0 5000 10000 15000 20000 25000
0 5 10 15
nilai H
titik pengukuran
line 5
trendline 5 Linear (trendline 5)
y = -246,71x + 25565 R² = 0,0103
0 5000 10000 15000 20000 25000 30000 35000 40000
0 5 10 15
nilai H
titik pengukuran
line 6
trendline 6 Linear (trendline 6)
Gambar 4.7 Line 7
Gambar 4.8 Line 8 y = 1108,8x + 16394
R² = 0,2004
0 5000 10000 15000 20000 25000 30000 35000 40000
0 5 10 15
nilai H
titik pengukuran
line 7
trendline 7 Linear (trendline 7)
y = -1165,5x + 31912 R² = 0,4581
0 5000 10000 15000 20000 25000 30000 35000 40000
0 5 10 15
nilai H
titik pengukuran
line 8
trendline 8 Linear (trendline 8)
Gambar 4.9 Line 9
Gambar 4.10 Line 10
Terlihat dari grafik-grafik di atas, error tiap line yaitu secara berturut-turut dari line 2 sampai line 10 sebesar 6,27%, 11,24%, 7,15%, 29,22%, 6,51%, 1,03%, 20,04%, 45,81%, 77,77%, dan 20,16%. Pada line 9 terdapat error terbesar untuk nilai magnetnya karena diperkirakan terdapat kabel yang berada di bawah tanah pengukuran yang berada di sebelah Barat. Untuk pengolahan data lapangan, kami tidak menggunakan koreksi IGRF karena pada saat kalibrasi alat Proton Precession Magnetometer sudah dilakukan koreksi yang nilai H IGRF-nya sebesar 57070. Nilai H IGRF ini didapat dengan memasukkan koordinat longitude dan latitude ke dalam web IGRF. Nilai H IGRF bersifat regional.
y = 1812,5x + 20311 R² = 0,777
0 5000 10000 15000 20000 25000 30000 35000 40000 45000
0 5 10 15
nilai H
titik pengukuran
line 9
trendline 9 Linear (trendline 9)
y = -739,69x + 28052 R² = 0,2016
0 5000 10000 15000 20000 25000 30000 35000
0 5 10 15
nilai H
titik pengukuran
line 10
trendline 10 Linear (trendline 10)
4.2 Interpretasi
Dari hasil pengolahan data pengukuran didapatkan dua peta anomali regional dan anomali lokal yang kemudian akan dianalisa secara kualitatif.
Gambar 4.11 Peta anomali lokal
Peta anomali lokal didapatkan dari hasil residual setelah dilakukan kontitunitas keatas pada software magpick. Intensitas medan magnet yang didapatkan berkisar antara -24.000 nT sampai dengan 28.000 nT. Dalam hal ini peta anomali lokal digunakan untuk mencari target dalam hal ini adalah pipa air. Dari pengamatan dilapangan diketahui terdapat pipa air yang keluar di sungai sekitar lapangan tepatnya pada x=54 dan y=36 yang diperkirakan memanjang ke arah Graha ITS. Apabila dilihat dari peta anomali lokal diperkirakan pipa memanjang dari timur berbelok ke arah utara pada x=50 dan y=37.5, dari hal tersebut dibuat sayatan memanjang (sayatan warna kuning). Selain itu terlihat ada dipole intensitas medan magnet yang menarik sekitar x=26 dan y dari 25-54, sehingga dibuat sayatan pada daerah tersebut (sayatan biru muda).
Gambar 4.12 Peta anomali regional
Peta anomali regional didapatkan dari hasil kontitunitas keatas 18 m pada software magpick. Intensitas medan magnet yang didapatkan berkisar antara 21400 nT sampai dengan 23100 nT. Dari peta regional ini digunakan untuk mengetahui basement di sekitar lokasi pengukuran. Dari peta anomali regional terlihat intensitas medan magnet tertinggi memanjang di x=10 kearah utara, untuk intensitar medan magnet terendah berada di sebelah barat daya peta anomali regional.
Dari sayatan pada peta anomali lokal dibuat kurva yang nantinya akan dibuat model yang menyamai data dari sayatan tersebut. Dari model yang dibuat, akan dianalisa secara kuantitatif untuk mengetahui target atau anomali yang berada dibawah permukaan. Kurva dari sayatan yang dibuat diperlihatkan oleh gambar 4.13.
Gambar 4.13 Hasil pengolahan data regional dan kurva hasil sayatan pada anomali lokal, sebelah kiri sayatan kuning dan sebelah kanan sayatan biru
Dari sayatan kuning (pada gambar 4.13 kiri) terlihat puncak nilai intensitas magnetik sebesar 4665 nT dan untuk sayatan biru (gambar 4.13 kanan) pada puncak nilai intensitas magnetik sebesar 19256 nT. Dalam hal ini target pipa berada pada kurva sebelah kiri, dari kurva tersebut diolah pada sogtware mag2dc untuk mendapatkan model pipa sebagai target.
Setelah dilakukan proses pemodelan menggunakan software mag2dc menggunakan data hasil sayatan dari software surfer didapatkan model magnetic seperti pada gambar dibawah:
Gambar 4.14 Pemodelan Mag2dc
Seperti diketahui sebelumnya, nilai intensitas magnetic (kurva) dipengaruhi oleh faktor subseptibilitas, kedalaman, dan dimensi target. Dengan merekayasa bentuk bawah permukaannya, maka didapat bentuk kurva yang mendekati hasil pengukuran sebenarnya, karena target kita ialah daerah sebelah tenggara daerah akuisisi yang diprediksi terdapat pipa logam, maka fokus kita akan ke daerah tersebut. Daerah kurva antiklin disebelah kanan diprediksi lokasi dari pipa besi yang dicari.
Dengan mencocokkan bentuk model dengan kurva intensitas magnetic (nT) didapatlah model benda dibawah permukaan. Model yang dibuat meliputi model dasar yaitu tanah alluvial dan pipa besi yang disinyalir ada sekitar tersebut. Dimana tanah alluvial memiliki nilai suseptibilitas sebesar 0.02, kemudian dengan mengikuti bentuk kurva dari data dibuat dua model pipa besi. Pipa besi pertama yaitu sebelah kanan dengan nilai suseptibilitas 13,387 dengan lebar jari-jari sekitar 40 cm di kedalaman 2,5 meter, ini sesuai dengan pipa yang nampak dilapangan dimana pipa memanjang dari barat pada awalnya dan berbelok ke utara. Untuk anomali benda di sebelah kiri kami menginterpretasikan bahwa benda tersebut adalah pipa lain dengan nilai suseptibilitas yang lebih tinggi karena ukurannya lebih besar yang memanjang dari selatan ke utara menuju Graha ITS. Pipa disebelah kiri memiliki nilai suspetibilitas 87,450 dengan jari-jari sekitar 60 cm di kedalaman 2, berdasarkan teori nilai suseptibilitas besi antara 4 sampai 100.
BAB V PENUTUP
5.1 Kesimpulan
Setelah dilaksanakan pengukuran lapangan, processing data, serta analisa dan interpretasi hasil olah data, disimpulkan beberapa poin peting berikut:
- Terdapat anomali intensitas medan magnet pada bagian tenggara, x=54 dan y=36 yang diperkirakan memanjang ke arah Graha ITS, dengan besar kisaran nilai H sebesar -24.000 nT sampai dengan 28.000 nT. Dengan mencocokkan factor suseptibilitas, kedalaman dan dimensi target, maka pipa logam diidentiffikasikan memiliki nilai suseptibilitas 13,387 dengan lebar jari-jari sekitar 40 cm di kedalaman 2,5 meter. Pipa tersebut memanjang dari arah timur laut ke arah barat daya disekitar titik awal pengukuran line 1-4 (sisi tenggara daerah akuisisi/survey magnetic).
- Anomali kedua terdeteksi di bagian barat pengukuran. Benda tersebut adalah pipa lain dengan nilai suseptibilitas yang lebih tinggi karena ukurannya lebih besar yang memanjang dari selatan ke utara menuju Graha ITS. Pipa disebelah tersebut memiliki nilai suspetibilitas 87,450 dengan jari-jari sekitar 60 cm di kedalaman 2, berdasarkan teori nilai suseptibilitas besi antara 4 sampai 100.