Constraint Propagation Analysis and Adjusted Systems
Gen Yoneda
Department of Mathematical Science, Waseda Univ., Japan [email protected]
Hisa-aki Shinkai
Computational Sci. Div., RIKEN (The Institute of Physical and Chemical Research), Japan [email protected]
Outline
• Constraint propagation analysis gives us an index of stability
• We try to unify previous treatments (such as hyperbolic and BSSN) by adjusting eqM.
Refs:
review article gr-qc/0209111 (Nova Science Publ.)
for Ashtekar form. PRD 60 (1999) 101502, CQG 17 (2000) 4799, CQG 18 (2001) 441 for ADM form. PRD 63 (2001) 124019, CQG 19 (2002) 1027
for BSSN form. PRD 66 (2002) 124003 general CQG 20 (2003) L31
This PDF is available at
www.f.waseda.jp/yoneda/mex.pdf
Plan of talks
1. Background of the problem
• ADM,BSSN
• hyperbolic
• asymptotically constrained 2. Constraint propagation analysis
• For time evolution systems with constraints in general
• Constraint Amplification Factors (CAF) as an index to express stability (partially new)
• examples (partially new) 3. adjusted systems
• For time evolution systems with constraints in general
• Example:Maxwell equations
• Example:Einstein eqautions(ADM) (partially new)
• Example:Einstein eqautions(BSSN) (partially new) 4. Numerical Demonstrations (new) → Hisaaki
5. Discussion (new) → Hisaaki
Best formulation of the Einstein eqs. for long-term stable & accurate simulation?
Many (too many) trials and errors, not yet a definit recipe.
time time
err or er ro r
Blow up
Blow up Blow up Blow up
ADM ADM
BSSN BSSN
Mathematically equivalent formulations, but differ in its stability!
strategy 0: Arnowitt-Deser-Misner formulation
strategy 1: Shibata-Nakamura’s (Baumgarte-Shapiro’s) modifications to the standard ADM strategy 2: Apply a formulation which reveals a hyperbolicity explicitly
strategy 3: Formulate a system which is “asymptotically constrained” against a violation of constraints
By adding constraints in RHS, we can kill error-growing modes
⇒ How can we understand the features systematically?
1 background of the problem
strategy 1 Shibata-Nakamura’s (Baumgarte-Shapiro’s) modifications to the standard ADM – define new variables (φ, γ ˜ ij ,K, A ˜ ij , Γ ˜ i ), instead of the ADM’s (γ ij ,K ij ) where
˜
γ ij ≡ e − 4φ γ ij , A ˜ ij ≡ e − 4φ (K ij − (1/3)γ ij K), Γ ˜ i ≡ Γ ˜ i jk γ ˜ jk , use momentum constraint in Γ i -eq., and impose det˜ γ ij = 1 during the evolutions.
– The set of evolution equations become (∂ t − L β )φ = − (1/6)αK,
(∂ t − L β )˜ γ ij = − 2α A ˜ ij ,
(∂ t − L β )K = α A ˜ ij A ˜ ij + (1/3)αK 2 − γ ij ( ∇ i ∇ j α),
(∂ t − L β ) ˜ A ij = − e − 4φ ( ∇ i ∇ j α) T F + e − 4φ αR (3) ij − e − 4φ α(1/3)γ ij R (3) + α(K A ˜ ij − 2 ˜ A ik A ˜ k j )
∂ t Γ ˜ i = − 2(∂ j α) ˜ A ij − (4/3)α(∂ j K )˜ γ ij + 12α A ˜ ji (∂ j φ) − 2α A ˜ k j (∂ j γ ˜ ik ) − 2α Γ ˜ k lj A ˜ j k γ ˜ il
− ∂ j β k ∂ k γ ˜ ij − γ ˜ kj (∂ k β i ) − γ ˜ ki (∂ k β j ) + (2/3)˜ γ ij (∂ k β k ) R ij = ∂ k Γ k ij − ∂ i Γ k kj + Γ m ij Γ k mk − Γ m kj Γ k mi =: ˜ R ij + R φ ij
R φ ij = − 2 ˜ D i D ˜ j φ − 2˜ g ij D ˜ l D ˜ l φ + 4( ˜ D i φ)( ˜ D j φ) − 4˜ g ij ( ˜ D l φ)( ˜ D l φ)
R ˜ ij = − (1/2)˜ g lm ∂ lm g ˜ ij + ˜ g k(i ∂ j ) Γ ˜ k + ˜ Γ k Γ ˜ (ij)k + 2˜ g lm Γ ˜ k l(i Γ ˜ j)km + ˜ glm Γ ˜ k im Γ ˜ klj – No explicit explanations why this formulation works better.
AEI group (2000): the replacement by momentum constraint is essential.
strategy 2 Apply a formulation which reveals a hyperbolicity explicitly.
For a first order partial differential equations on a vector u,
∂ t
u 1 u 2 ...
=
A
∂ x
u 1 u 2 ...
characteristic part
+ B
u 1 u 2 ...
lower order part if the eigenvalues of A are
weakly hyperbolic all real.
strongly hyperbolic all real and ∃ a complete set of eigenvectors.
symmetric hyperbolic if A is real and symmetric (Hermitian).
Symmetric hyp.
Symmetric hyp.
Strongly hyp.
Strongly hyp.
Weakly hyp.
Weakly hyp.
Expectations
– Wellposed behaviour
symmetric hyperbolic system = ⇒ WELL-POSED , || u(t) || ≤ e κt || u(0) ||
– Better boundary treatments ⇐ = ∃ characteristic field.
– known numerical techniques in Newtonian hydrodynamics.
strategy2 Apply a formulation which reveals a hyperbolicity explicitly (cont.) Are hyperbolic formluations actulay helpful in numerical simulations?
Unfortunately, we do not have conclusive answer to it yet.
Theoretical issues
• Well-posedness of the non-linear hyperbolic formulations is obtained only locally in time domain.
• Energy inequality indicates boundedness of norm which does not forbid divergence
• The discussion of hyperbolcity only uses characteristic part of evolution equations, and ignore the non- characteristic part.
Numerical issues
• Earlier numerical comparisons reported the advantages of hyperbolic formulations, but they were against to the standard ADM formulation. [Cornell-Illinois, NCSA, ...]
• If the gauge functions are evolved with hyperbolic equations, then their finite propagation speeds may cause a pathological shock formation [Alcubierre].
• Some group [HS-GY, Hern] reported no drastic numerical differences between three hyperbolic levels, while other group [Calabresse] reported that strongly hyperbolic is good and weakly hyperbolic is bad. Of course, these statements only cast on a particular formulations and models to apply.
Proposed symmetric hyperbolic systems were not always the best one for numerics.
strategy 3 Formulate a system which is “asymptotically constrained” against a violation of constraints
“Asymptotically Constrained System”– Constraint Surface as an Attractor
t=0
Constrained Surface
(satisfies Einstein's constraints)
time time err or er ro r
Blow up Blow up
Stabilize?
Stabilize?
?
method 1: λ-system (Brodbeck et al, 2000)
– Add aritificial force to reduce the violation of con- straints
– To be guaranteed if we apply the idea to a sym- metric hyperbolic system.
method 2: Adjusted system (Yoneda HS, 2000, 2001) – We can control the violation of constraints by ad-
justing constraints to EoM.
– Eigenvalue analysis of constraint propagation equations may prodict the violation of error.
– This idea is applicable even if the system is not symmetric hyperbolic. ⇒
for the ADM/BSSN formulation, too!!
Idea of λ-system
Brodbeck, Frittelli, H¨ ubner and Reula, JMP40(99)909 We expect a system that is robust for controlling the violation of constraints
Recipe
1. Prepare a symmetric hyperbolic evolution system ∂ t u = J ∂ i u + K 2. Introduce λ as an indicator of violation of constraint
which obeys dissipative eqs. of motion
∂ t λ = αC − βλ (α = 0, β > 0) 3. Take a set of (u, λ) as dynamical variables ∂ t
u λ
A 0 F 0
∂ i
u λ
4. Modify evolution eqs so as to form
a symmetric hyperbolic system ∂ t
u λ
=
A F ¯ F 0
∂ i
u λ
Remarks
• BFHR used a sym. hyp. formulation by Frittelli-Reula [PRL76(96)4667]
• The version for the Ashtekar formulation by HS-Yoneda [PRD60(99)101502]
for controlling the constraints or reality conditions or both.
• Succeeded in evolution of GW in planar spacetime using Ashtekar vars. [CQG18(2001)441]
• Do the recovered solutions represent true evolution? by Siebel-H¨ ubner [PRD64(2001)024021]
80s 90s 2000s
A D M A D M
Shibata-Nakamura Shibata-Nakamura
95
Baumgarte-Shapiro Baumgarte-Shapiro
99
Nakamura-Oohara Nakamura-Oohara
87
Bona-Masso Bona-Masso
92
Anderson-York Anderson-York
99
ChoquetBruhat-York ChoquetBruhat-York
95-97
Frittelli-Reula Frittelli-Reula
96 62
Ashtekar Ashtekar
86
Yoneda-Shinkai Yoneda-Shinkai
00
Kidder-Scheel Kidder-Scheel -Teukolsky -Teukolsky
01
lambda-system lambda-system
99
adjusted-systema d j u s t e d - s y s t e m
01
Alcubierre Alcubierre
97
80s 90s 2000s
A D M A D M
Shibata-Nakamura Shibata-Nakamura
95
Baumgarte-Shapiro Baumgarte-Shapiro
99
Nakamura-Oohara Nakamura-Oohara
87
Bona-Masso Bona-Masso
92
Anderson-York Anderson-York
99
ChoquetBruhat-York ChoquetBruhat-York
95-97
Frittelli-Reula Frittelli-Reula
96 62
Ashtekar Ashtekar
86
Yoneda-Shinkai Yoneda-Shinkai
00
Kidder-Scheel Kidder-Scheel -Teukolsky -Teukolsky
01
NCSA
NCSA Potsdam Potsdam
G-code G-code H-code
H-code BSSN-code BSSN-code
Cornell-Illinois Cornell-Illinois
UWash UWash
Hern Hern
Caltech Caltech PennState
PennState
lambda-system lambda-system
99
adjusted-systema d j u s t e d - s y s t e m
01
Shinkai-Yoneda Shinkai-Yoneda Alcubierre
Alcubierre
97
Nakamura-Oohara
Nakamura-Oohara Shibata Shibata
80s 90s 2000s
A D M
Shibata-Nakamura
95
Baumgarte-Shapiro
99
Nakamura-Oohara
87
Bona-Masso
92
Anderson-York
99
ChoquetBruhat-York
95-97
Frittelli-Reula
96 62
Ashtekar
86
Yoneda-Shinkai
99
Kidder-Scheel -Teukolsky
01
NCSA AEI
G-code
H-code BSSN-code
Cornell-Illinois
UWash
Hern
Caltech PennState
lambda-system
99
ad ju st ed -s ys te m
01
Shinkai-Yoneda Alcubierre
97
Nakamura-Oohara Shibata
Iriondo-Leguizamon-Reula 97
LSU
Illinois
section 1 Background of the problem
section 2 Constraint propagation analysis
• For time evolution systems with constraints in general
• Constraint Amplification Factors (CAF) as an index to express stability (partially new)
• example1:Maxwell example2:ADM example3:BSSN
section 3 Adjusted systems
section 4 Numerical experiment
section 5 Discussion
For time evolution systems with constraints in general
∂ t u a = f (u a , ∂u a , ∂∂u a ) evolution equations C α = C α (u a , ∂u a , ∂∂u a ) ≈ 0 constraints
If constraints are first class, constraint propagation takes this form
∂ t C α = A 0 C α + A 1 ∂C α + A 2 ∂∂C α + · · · constraint propagation
Analytically, constraints are satisfied during evolution. But numerically, does not.
By Fourier transformation, we rewrite constraint propagation with each modes, which is ODE.
∂ t C ˆ α = A 0 C ˆ α + A 1 (i~k) ˆ C α + A 2 (i~k)(i~k) ˆ C α + · · ·
= (A 0 + A 1 (i~k) + A 2 (i~k)(i~k) + · · · )
| {z }
M
C ˆ α constraint propagation 2 constraint propagation matrix
we substitute background metric into M → M bg
CAF := Eigenvalues M bg Constraint Amplification Factors
By evaluating CAFs before simulations, we can predict constraint violation in
numerical evolution.
A Classification of Constraint Propagations
(C1) Asymptotically constrained :
Violation of constraints decays (converges to zero).
(C2) Asymptotically bounded :
Violation of constraints is bounded at a certain value.
(C3) Diverge :
At least one constraint will diverge.
Note that (C1) ⊂ (C2).
(C1) Decay (C2) Bounded
(C3) Diverge
time time
err or er ro r
Diverge Diverge
Constrained,
Constrained,
or Decay
or Decay
A Classification of Constraint Propagations (cont.)
∂ t C = λC ⇒ C = C (0) exp(λt)
(C1) Asymptotically constrained : (Violation of constraints converges to zero.)
≈ all the real part of CAFs are negative
(C2) Asymptotically bounded : (Violation of constraints is bounded at a certain value.)
≈ all the real part of CAFs are non-positive
(C3) Diverge: (At least one constraint will diverge.)
≈ there exists CAF with positive real part
A Classification of Constraint Propagations (cont.)
∂ t C = M C , CAF = Eigenvalues(M )
(C1) Asymptotically constrained : (Violation of constraints decays.)
⇔ all the real part of CAFs are negative
(C2) Asymptotically bounded : (Violation of constraints is bounded at a certain value.)
⇔ all the real part of CAFs are non-positive
and Jordan matrices for eigenvalues with zero real part are diagonal
⇐ all the real part CAFs are non-positive and M is diagonalizable (C3) Diverge: (At least one constraint will diverge.)
⇔ there exists CAF with positive real part
or there exists non diagonal Jordan matrix for eigenvalues with zero real part
A Classification of Constraint Propagations (cont.)
∂ t C = M C , CAF = Eigenvalues(M )
(C1) Asymptotically constrained : (Violation of constraints decays.)
⇔ all the real part of CAFs are negative
(C2) Asymptotically bounded : (Violation of constraints is bounded at a certain value.)
⇔ all the real part of CAFs are non-positive
and Jordan matrices for eigenvalues with zero real part are diagonal
⇐ all the real part CAFs are non-positive and M is diagonalizable (C3) Diverge: (At least one constraint will diverge.)
⇔ there exists CAF with positive real part
or there exists non diagonal Jordan matrix for eigenvalues with zero real part
Each eigenvalue evaluation.
Real part: Nagative is better than zero and positive is worst.
Imaginary part: non-zero is better than zero for avoiding degeneracy.
A flowchart to classify the fate of constraint propagation.
Q1: Is there a CAF which real part is positive?
NO / YES
Q2: Are all the real parts of CAFs negative?
Q3: Is the constraint propagation matrix diagonalizable?
Q4: Is a real part of the degenerated CAFs is zero?
NO / YES
NO / YES
YES / NO
Diverge
Asymptotically Constrained
Asymptotically Bounded
Diverge
Asymptotically Bounded
Q5: Is the associated Jordan matrix diagonal?
NO / YES Asymptotically
Bounded
Example1: Maxwell equation
∂ t E i = −c² i j l ∂ l B j , ∂ t B i = c² i j l ∂ l E j C E := ∂ i E i ≈ 0, , C B := ∂ i B i ≈ 0,
∂ t C E = 0, ∂ t C B = 0
CAF = (0, 0) (asymptotically bounded) Example 2: ADM equation
∂ t γ ij = −2αK ij + ∇ i β j + ∇ j β i ,
∂ t K ij = αR (3) ij + αKK ij − 2αK ik K k j − ∇ i ∇ j α + (∇ i β k )K kj + (∇ j β k )K ki + β k ∇ k K ij , H := R (3) + K 2 − K ij K ij ,
M i := ∇ j K j i − ∇ i K,
∂ t H = β j (∂ j H) − 2αγ ji (∂ i M j ) + 2αK H + α(∂ l γ mn )(2γ ml γ nj − γ mn γ lj )M j − 4γ im (∂ m α)M i ,
∂ t M i = −(1/2)α(∂ i H) + β j (∂ j M i ) + αK M i − (∂ i α)H − β k γ jm (∂ i γ mk )M j + (∂ i β m )γ mj M j . CAF = (0, 0, ± √
−k 2 ) (in Minkowskii background) (asymptotically bounded)
Example 3: BSSN
∂ t B ϕ = −(1/6)αK + (1/6)β i (∂ i ϕ) + (∂ i β i ),
∂ t B γ ˜ ij = −2α A ˜ ij + ˜ γ ik (∂ j β k ) + ˜ γ jk (∂ i β k ) − (2/3)˜ γ ij (∂ k β k ) + β k (∂ k γ ˜ ij ),
∂ t B K = −D i D i α + α A ˜ ij A ˜ ij + (1/3)αK 2 + β i (∂ i K ),
∂ t B A ˜ ij = −e −4ϕ (D i D j α) T F + e −4ϕ α(R ij BSSN ) T F + αK A ˜ ij − 2α A ˜ ik A ˜ k j + (∂ i β k ) ˜ A kj + (∂ j β k ) ˜ A ki
−(2/3)(∂ k β k ) ˜ A ij + β k (∂ k A ˜ ij ),
∂ t B ˜Γ i = −2(∂ j α) ˜ A ij + 2α(˜Γ i jk A ˜ kj − (2/3)˜ γ ij (∂ j K) + 6 ˜ A ij (∂ j ϕ)) − ∂ j (β k (∂ k γ ˜ ij ) − γ ˜ kj (∂ k β i )
− γ ˜ ki (∂ k β j ) + (2/3)˜ γ ij (∂ k β k )).
H BSSN = R BSSN + K 2 − K ij K ij , M BSSN i = ∇ j K j i − ∇ i K
G i = ˜Γ i − γ ˜ jk ˜Γ i jk A = ˜ A ij γ ˜ ij
S = ˜ γ − 1
constraint propagation is given in next page CAF = (0 (×3), ± √
−k 2 (3 pairs)) (in Minkowskii background) (asymptotically bounded)
A Full set of BSSN constraint propagation eqs.
∂ t BS
H BS M i
G i A S
=
A 11 A 12 A 13 A 14 A 15
− (1/3)(∂ i α) + (1/6)∂ i αK A 23 0 A 25
0 α˜ γ ij 0 A 34 A 35
0 0 0 β k (∂ k S ) − 2α γ ˜
0 0 0 0 αK + β k ∂ k
H BS M j
G j A S
A
11= +(2/3)αK + (2/3)α A + β
k∂
kA
12= − 4e
−4ϕα(∂
kϕ)˜ γ
kj− 2e
−4ϕ(∂
kα)˜ γ
jkA
13= − 2αe
−4ϕA ˜
kj∂
k− αe
−4ϕ(∂
jA ˜
kl)˜ γ
kl− e
−4ϕ(∂
jα) A − e
−4ϕβ
k∂
k∂
j− (1/2)e
−4ϕβ
kγ ˜
−1(∂
jS )∂
k+(1/6)e
−4ϕ˜ γ
−1(∂
jβ
k)(∂
kS ) − (2/3)e
−4ϕ(∂
kβ
k)∂
jA
14= 2αe
−4ϕγ ˜
−1γ ˜
lk(∂
lϕ) A ∂
k+ (1/2)αe
−4ϕ˜ γ
−1(∂
lA )˜ γ
lk∂
k+ (1/2)e
−4ϕγ ˜
−1(∂
lα)˜ γ
lkA ∂
k+ (1/2)e
−4ϕγ ˜
−1β
mγ ˜
lk∂
m∂
l∂
k− (5/4)e
−4ϕγ ˜
−2β
mγ ˜
lk(∂
mS )∂
l∂
k+ e
−4ϕ˜ γ
−1β
m(∂
m˜ γ
lk)∂
l∂
k+ (1/2)e
−4ϕγ ˜
−1β
i(∂
j∂
iγ ˜
jk)∂
k+(3/4)e
−4ϕ˜ γ
−3β
i˜ γ
jk(∂
iS )(∂
jS )∂
k− (3/4)e
−4ϕ˜ γ
−2β
i(∂
i˜ γ
jk)(∂
jS )∂
k+ (1/3)e
−4ϕ˜ γ
−1γ ˜
pj(∂
jβ
k)∂
p∂
k− (5/12)e
−4ϕ˜ γ
−2γ ˜
jk(∂
kβ
i)(∂
iS )∂
j+ (1/3)e
−4ϕγ ˜
−1(∂
kγ ˜
ij)(∂
jβ
k)∂
i− (1/6)e
−4ϕγ ˜
−1˜ γ
mk(∂
k∂
lβ
l)∂
mA
15= (4/9)αK A − (8/9)αK
2+ (4/3)αe
−4ϕ(∂
i∂
jϕ)˜ γ
ij+ (8/3)αe
−4ϕ(∂
kϕ)(∂
l˜ γ
lk) + αe
−4ϕ(∂
jγ ˜
jk)∂
k+8αe
−4ϕ˜ γ
jk(∂
jϕ)∂
k+ αe
−4ϕ˜ γ
jk∂
j∂
k+ 8e
−4ϕ(∂
lα)(∂
kϕ)˜ γ
lk+ e
−4ϕ(∂
lα)(∂
kγ ˜
lk) + 2e
−4ϕ(∂
lα)˜ γ
lk∂
k+e
−4ϕ˜ γ
lk(∂
l∂
kα)
A
23= αe
−4ϕγ ˜
km(∂
kϕ)(∂
jγ ˜
mi) − (1/2)αe
−4ϕΓ ˜
mklγ ˜
kl(∂
jγ ˜
mi)
+(1/2)αe
−4ϕγ ˜
mk(∂
k∂
j˜ γ
mi) + (1/2)αe
−4ϕγ ˜
−2(∂
iS )(∂
jS ) − (1/4)αe
−4ϕ(∂
iγ ˜
kl)(∂
jγ ˜
kl) + αe
−4ϕγ ˜
km(∂
kϕ)˜ γ
ji∂
m+αe
−4ϕ(∂
jϕ)∂
i− (1/2)αe
−4ϕΓ ˜
mklγ ˜
kl˜ γ
ji∂
m+ αe
−4ϕγ ˜
mkΓ ˜
ijk∂
m+ (1/2)αe
−4ϕ˜ γ
lkγ ˜
ji∂
k∂
l+(1/2)e
−4ϕ˜ γ
mk(∂
jγ ˜
im)(∂
kα) + (1/2)e
−4ϕ(∂
jα)∂
i+ (1/2)e
−4ϕ˜ γ
mk˜ γ
ji(∂
kα)∂
mA
25= − A ˜
ki(∂
kα) + (1/9)(∂
iα)K + (4/9)α(∂
iK) + (1/9)αK∂
i− α A ˜
ki∂
kA
34= − (1/2)β
kγ ˜
ilγ ˜
−2(∂
lS )∂
k− (1/2)(∂
lβ
i)˜ γ
lkγ ˜
−1∂
k+ (1/3)(∂
lβ
l)˜ γ
ikγ ˜
−1∂
k− (1/2)β
l˜ γ
in(∂
lγ ˜
mn)˜ γ
mkγ ˜
−1∂
k+(1/2)β
kγ ˜
ilγ ˜
−1∂
l∂
kA
35= − (∂
kα)˜ γ
ik+ 4α˜ γ
ik(∂
kϕ) − α˜ γ
ik∂
ksection 1 Background of the problem section 2 Constraint propagation analysis
section 3 Adjusted systems
• For time evolution systems with constraints in general
• Example:Maxwell equations
• Example:Einstein eqautions(Ashtekar)
• Example:Einstein eqautions(ADM) (partially new)
• Example:Einstein eqautions(BSSN) (partially new)
section 4 Numerical experiment
section 5 Discussion
Idea of adjusted system
Add constraint terms to evolution equations (adjust)
∂ t u a = f (u a , ∂u a , ∂∂u a ) + F (C α , ∂C α , ∂∂C α )
constraint propagation changes depending on them, too
∂ t C α = A 0 C α + A 1 ∂C α + A 2 ∂∂C α + · · · + B 0 C α + B 1 ∂C α + B 2 ∂∂C α + · · ·
CAF changes depending on them, too
We should adjust so that CAFs improve.
Advantage of adjusted system
1. Available even if the base system is not a symmetric hyperbolic.
2. Keep the number of the variables same with the original system.
3. Unified understanding for formulation problem is possible using the notions of
adjustment and CAF
Example: the Maxwell equations
Yoneda HS, CQG 18 (2001) 441 Maxwell evolution equations.
∂ t E i = c i jk ∂ j B k + P i C E + Q i C B ,
∂ t B i = − c i jk ∂ j E k + R i C E + S i C B ,
C E = ∂ i E i ≈ 0, C B = ∂ i B i ≈ 0,
sym. hyp ⇔ P i = Q i = R i = S i = 0, strongly hyp ⇔ (P i − S i ) 2 + 4R i Q i > 0, weakly hyp ⇔ (P i − S i ) 2 + 4R i Q i ≥ 0 Constraint propagation equations
∂ t C E = (∂ i P i )C E + P i (∂ i C E ) + (∂ i Q i )C B + Q i (∂ i C B ),
∂ t C B = (∂ i R i )C E + R i (∂ i C E ) + (∂ i S i )C B + S i (∂ i C B ),
sym. hyp ⇔ Q i = R i ,
strongly hyp ⇔ (P i − S i ) 2 + 4R i Q i > 0, weakly hyp ⇔ (P i − S i ) 2 + 4R i Q i ≥ 0 CAFs?
∂ t
C ˆ E C ˆ B
=
∂ i P i + P i k i ∂ i Q i + Q i k i
∂ i R i + R i k i ∂ i S i + S i k i
∂ l
C ˆ E C ˆ B
≈
P i k i Q i k i R i k i S i k i
C ˆ E C ˆ B
=: T
C ˆ E C ˆ B
⇒ CAFs = (P i k i + S i k i ± (P i k i + S i k i ) 2 + 4(Q i k i R j k j − P i k i S j k j ))/2 Therefore CAFs become negative-real when
P i k i + S i k i < 0, and Q i k i R j k j − P i k i S j k j < 0
Example: Maxwell adjusted (cont.)
GY HS, CQG 18 (2001) 441
∂ t E i = −c² i j l ∂ l B j + κ∂ i C E , ∂ t B i = c² i j l ∂ l E j + κ∂ i C B C E := ∂ i E i ≈ 0, , C B := ∂ i B i ≈ 0,
∂ t C E = κ∂ i ∂ i C E , ∂ t C B = κ∂ i ∂ i C B CAF = (−κ, −κ)
original Maxwell(κ = 0), CAF= (0, 0), averaged VN factor for FTCS=1.013
adjusted Maxwell(κ = 0.1), CAF= (−0.1, −0.1), averaged VN factor for FTCS=0.8017
adjusted Maxwell(κ = −0.1), CAF= (+0.1, +0.1), averaged VN factor for FTCS=1.2246 Adjustments also reduce the von Neumann factors.
In other words, adjustment is just like adding viscosity terms to evolution equations.
Example: the Ashtekar equations
HS Yoneda, CQG 17 (2000) 4799 Adjusted dynamical equations:
∂ t E ˜ a i = − i D j ( cb a N ∼ E ˜ c j E ˜ b i ) + 2 D j (N [j E ˜ a i] ) + i A b 0 ab c E ˜ c i +X a i C H + Y a ij C M j + P a ib C Gb
adjust
∂ t A a i = − i ab c N ∼ E ˜ b j F ij c + N j F ji a + D i A a 0 + ΛN ∼ E ˜ i a +Q a i C H + R i aj C M j + Z i ab C Gb
adjust
Adjusted and linearized:
X = Y = Z = 0, P b ia = κ 1 (iN i δ b a ), Q a i = κ 2 (e − 2 N ∼ E ˜ i a ), R aj i = κ 3 ( − ie − 2 N ∼ ac d E ˜ i d E ˜ c j ) Fourier transform and extract 0th order of the characteristic matrix:
∂ t
C ˆ H C ˆ M i C ˆ Ga
=
0 i(1 + 2κ 3 )k j 0 i(1 − 2κ 2 )k i κ 3 kj i k k 0 0 2κ 3 δ a j 0
C ˆ H C ˆ M j
C ˆ Gb
Eigenvalues:
0, 0, 0, ± κ 3
− kx 2 − ky 2 − kz 2 , ± ( − 1 + 2κ 2 )(1 + 2κ 3 )(kx 2 + ky 2 + kz 2 )
In order to obtain non-positive real eigenvalues:
( − 1 + 2κ 2 )(1 + 2κ 3 ) < 0
3 Adjusted ADM systems
We adjust the standard ADM system using constraints as:
∂ t γ ij = − 2αK ij + ∇ i β j + ∇ j β i , (1) +P ij H + Q k ij M k + p k ij ( ∇ k H ) + q kl ij ( ∇ k M l ), (2)
∂ t K ij = αR (3) ij + αKK ij − 2αK ik K k j − ∇ i ∇ j α + ( ∇ i β k )K kj + ( ∇ j β k )K ki + β k ∇ k K ij , (3) +R ij H + S k ij M k + r k ij ( ∇ k H ) + s kl ij ( ∇ k M l ), (4) with constraint equations
H := R (3) + K 2 − K ij K ij , (5) M i := ∇ j K j i − ∇ i K. (6)
We can write the adjusted constraint propagation equations as
∂ t H = (original terms) + H 1 mn [(2)] + H 2 imn ∂ i [(2)] + H 3 ijmn ∂ i ∂ j [(2)] + H 4 mn [(4)], (7)
∂ t M i = (original terms) + M 1i mn [(2)] + M 2i jmn ∂ j [(2)] + M 3i mn [(4)] + M 4i jmn ∂ j [(4)]. (8)
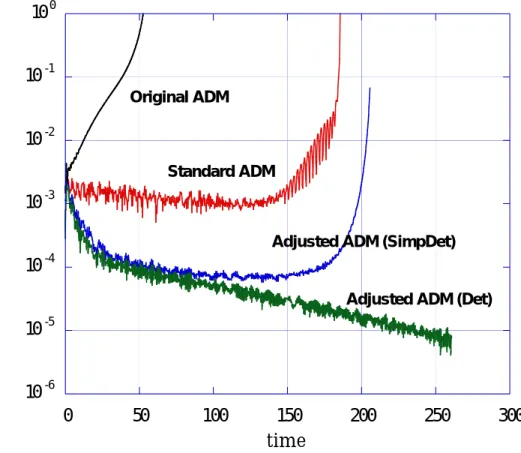
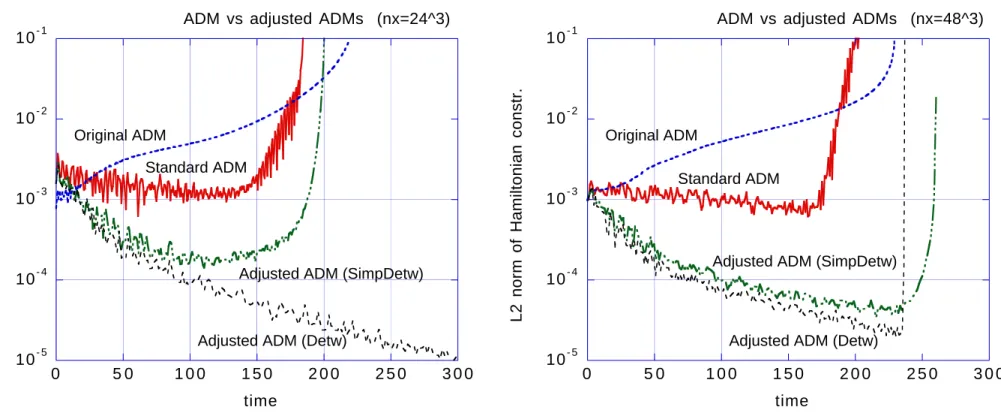
Standard ADM v.s. Original ADM in Minkowskii background
∂ t γ ij = −2αK ij + ∇ i β j + ∇ j β i
∂ t K ij = αR (3) ij + αKK ij − 2αK ik K k j − ∇ i ∇ j α + (∇ i β k )K kj + (∇ j β k )K ki +β k ∇ k K ij + κ F αγ ij H
standard : κ F = 0, original : κ F = −1/4 CAFs = (0, 0, ± r −k 2 (1 + 4κ F ))
standard : (0, 0, =, =) (asymptotically bounded) original : (0, 0, 0, 0) (diverge)
Standard ADM is better than original ADM.
Example 1: standard ADM vs original ADM (in Schwarzschild coordinate)
- 1 -0.5 0 0.5 1
0 5 1 0 1 5 2 0
no adjustments (standard ADM)
Real / Imaginary parts of Eigenvalues (AF)
rsch
( a )
-0.5 0 0.5
0 5 1 0 1 5 2 0
original ADM (κ
F= - 1/4)
rsch
( b )
Real / Imaginary parts of Eigenvalues (AF)
Figure 1: Amplification factors (AFs, eigenvalues of homogenized constraint propagation equations) are shown for the standard Schwarzschild coordinate, with (a) no adjustments, i.e., standard ADM, (b) original ADM (κ
F= − 1/4). The solid lines and the dotted lines with circles are real parts and imaginary parts, respectively. They are four lines each, but actually the two eigenvalues are zero for all cases. Plotting range is 2 < r ≤ 20 using Schwarzschild radial coordinate. We set k = 1, l = 2, and m = 2 throughout the article.
∂ t γ ij = − 2αK ij + ∇ i β j + ∇ j β i ,
∂ t K ij = αR (3) ij + αKK ij − 2αK ik K k j − ∇ i ∇ j α + ( ∇ i β k )K kj + ( ∇ j β k )K ki + β k ∇ k K ij + κ F αγ ij H ,
Example 2: Detweiler-type adjusted (in Schwarzschild coord.)
- 1 -0.5 0 0.5 1
0 5 1 0 1 5 2 0
Detweiler type, κ
L = + 1/2 ( b )
Real / Imaginary parts of Eigenvalues (AF)
rsch
- 1 -0.5 0 0.5 1
0 5 1 0 1 5 2 0
Detweiler type, κ
L = - 1/2
Real / Imaginary parts of Eigenvalues (AF)
( c )
rsch
Figure 2: Amplification factors of the standard Schwarzschild coordinate, with Detweiler type adjustments. Multipliers used in the plot are (b) κ
L= +1/2, and (c) κ
L= − 1/2.
∂ t γ ij = (original terms) + P ij H ,
∂ t K ij = (original terms) + R ij H + S k ij M k + s kl ij ( ∇ k M l ),
where P ij = − κ L α 3 γ ij , R ij = κ L α 3 (K ij − (1/3)Kγ ij ),
S k ij = κ L α 2 [3(∂ (i α)δ j) k − (∂ l α)γ ij γ kl ], s kl ij = κ L α 3 [δ (i k δ j) l − (1/3)γ ij γ kl ],
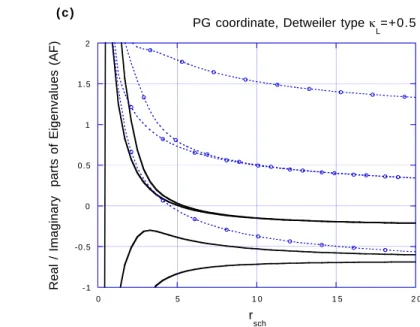
Example 4: Detweiler-type adjusted (in iEF/PG coord.)
- 1 -0.5 0 0.5 1 1.5 2
0 5 1 0 1 5 2 0
iEF coordinate, Detweiler type κ
L=+0.5 ( b )
Real / Imaginary parts of Eigenvalues (AF)
rsch
- 1 -0.5 0 0.5 1 1.5 2
0 5 1 0 1 5 2 0
PG coordinate, Detweiler type κ
L=+0.5 ( c )
Real / Imaginary parts of Eigenvalues (AF)
rsch