Prototipe Robot Line Follower Pengantar Makanan Berbasis Mikrokontroller ATMega32 Menggunakan Algoritma Fuzzy
Teks penuh
Gambar
![Gambar 2.4 : Memory ATMega32[15] (a) Flash Program Memory, (b) Data](https://thumb-ap.123doks.com/thumbv2/123dok/352345.32619/30.595.109.498.419.724/gambar-memory-atmega-a-flash-program-memory-data.webp)
![Gambar 2.12 Hubungan Power Supply ke LCD[15]](https://thumb-ap.123doks.com/thumbv2/123dok/352345.32619/37.595.232.431.137.288/gambar-hubungan-power-supply-ke-lcd.webp)
![Gambar 2.13 Kode Karakter CGROM pada LCD[15]](https://thumb-ap.123doks.com/thumbv2/123dok/352345.32619/39.595.111.522.74.735/gambar-kode-karakter-cgrom-pada-lcd.webp)
![Gambar 3.10 Detail rancangan aktuator robot Line Follower[1]](https://thumb-ap.123doks.com/thumbv2/123dok/352345.32619/53.595.282.398.297.435/gambar-detail-rancangan-aktuator-robot-line-follower.webp)
Dokumen terkait
tabel.4.12 maka, ada beberapa faktor yang mempengaruhi beberapa percobaan gagal, yaitu pergerakan robot terlalu cepat bergerak sehingga pembacaan sensor
sehingga Robot Light Follower dapat bergerak mengikuti perbedaan intensitas cahaya pada ke tiga sensor kiri, tengah, kanan.. Apabila robot berbelok kiri, maka motor kanan
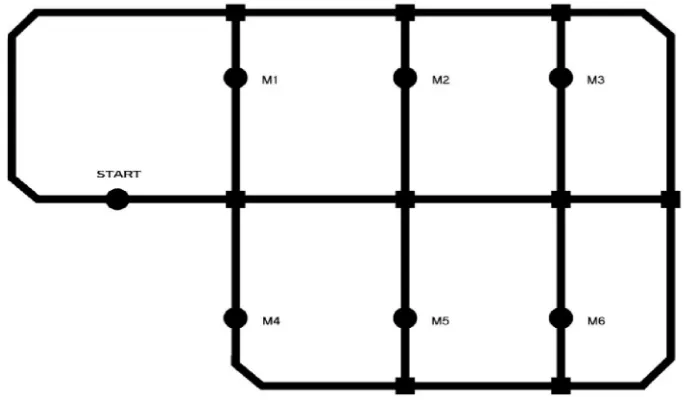
Pada paper ini diimplementasikan algoritma flood fill pada line follower robot untuk melakukan pencarian jalur dari tempat awal menuju tempat tujuan dalam
Berdasarkan seluruh pengujian dan uraian laporan perancangan Robot line follower dengan kendali logika fuzzy, dapat diambil kesimpulan yang mungkin dapat dijadikan
Dapat dilihat rute pergerakan robot sebelum menggunakan algoritma Fuzzy dan wall follower, jarak Robot dengan dinding bagian kanan belum beraturan , memiliki nilai
Dapat dilihat rute pergerakan robot sebelum menggunakan algoritma Fuzzy dan wall follower, jarak Robot dengan dinding bagian kanan belum beraturan , memiliki nilai error
JUDUL SKRIPSI : NAVIGASI ROBOT MOBIL PENGIKUT DINDING PADA PETA KONTES ROBOT PEMADAM API BERBASIS MIKROKONTROLLER DENGAN MENERAPKAN ALGORITMA LOGIKA FUZZY.. Menyatakan bahwa
Berdasarkan seluruh pengujian dan uraian laporan perancangan Robot line follower dengan kendali logika fuzzy, dapat diambil kesimpulan yang mungkin dapat dijadikan
