PROTOTIPE ROBOT
LINE FOLLOWER
PENGANTAR MAKANAN
BERBASIS MIKROKONTROLLER ATMega32
MENGGUNAKAN ALGORITMA
FUZZY
SKRIPSI
M. FEBRI RAHMANSYAH
091401019
PROGRAM STUDI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
PROTOTIPE ROBOT LINE FOLLOWER PENGANTAR MAKANAN BERBASIS MIKROKONTROLLER ATMega32
MENGGUNAKAN ALGORITMA FUZZY
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah Sarjana Ilmu Komputer
M. FEBRI RAHMANSYAH 091401019
PROGRAM STUDI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
MEDAN 2014
ii
PERSETUJ UAN
Judul : PROTOTIPE ROBOT LINE FOLLOWER
PENGANTAR MAKANAN BERBASIS MIKROKONTROLLER ATMega32 MENGGUNAKAN ALGORITMA FUZZY
Kategori : SKRIPSI
Nama : M. FEBRI RAHMANSYAH
NomorIndukMahasiswa : 091401019
Program Studi : SARJANA (S1) ILMU KOMPUTER
Departemen : ILMU KOMPUTER
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI
INFORMASI
Diluluskan di
Medan, Agustus 2014
Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Drs. Dahlan Sitompul, M.Eng Dr. PoltakSihombing, M.Kom
NIP. 196707252005011002 NIP.196203171991031001
Diketahui/Disetujuioleh
Program Studi S1 IlmuKomputer Ketua,
iii
PERNYATAAN
PROTOTIPE ROBOT LINE FOLLOWER PENGANTAR MAKANAN BERBASIS MIKROKONTROLLER ATMega32
MENGGUNAKAN ALGORITMA FUZZY
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing telah disebutkan sumbernya.
Medan, Agustus 2014
M. Febri Rahmansyah 091401019
iv
PENGHARGAAN
Alhamdulillahirrabbil’alamin. Puji dan syukur penulis ucapkan atas kehadirat Allah SWT yang telah memberikan limpahan rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan skripsi ini sebagai syarat untuk memperoleh gelar Sarjana Komputer, Program Studi Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara. Shalawat beriring salam penulis juga persembahkan kepada Nabi Besar Muhammad SAW.
Dengan segala kerendahan hati, pada kesempatan ini penulis menyampaikan terima kasih kepada semua pihak yang telah membantu penyelesaian skripsi dengan judul Prototipe Robot Line Follower Pengantar Makanan Berbasis Mikrokontroller ATMega32 Menggunakan Algoritma Fuzzy. Penulis mengucapkan terima kasih kepada:
1. Bapak Prof. Dr. Syahril Pasaribu, DTMH, MSc(CTM), SpA(K) sebagai Rektor Universitas Sumatera Utara (USU).
2. Bapak Prof.Dr.Muhammad Zarlis selaku Dekan Fasilkom-TI Universitas Sumatera Utara dan Pembimbing Akademik.
3. Bapak Dr. Poltak Sihombing, M.Kom sebagai Ketua Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara dan sekaligus sebagai Dosen Pembimbing I.
4. Ibu Maya Silvi Lydia, BSc. MSc sebagai Sekretaris Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara.
5. Bapak Drs. Dahlan Sitompul, M.Eng selaku dosen pembimbing yang telah memberikan arahan dan motivasi kepada penulis dalam pengerjaan skripsi ini.
6. Ibu Dian Wirdasari, S.Si, M.Kom dan Bapak Drs. Muhammad Firdaus, M.Si sebagai dosen penguji yang telah memberikan saran dan kritik kepada penulis dalam penyempurnaan skripsi ini.
7. Seluruh Dosen serta Staf Pegawai di Program Studi S1 Ilmu Komputer Fasilkom-TI USU.
v
9. Teman-teman seperjuangan mahasiswa S1-Ilmu Komputer stambuk 2009, Mustika Agung Maulana S.Kom, Azhar Indra Rifangi S.Kom, Gamal Nasir S.Kom, Dewa Made Suryadharma S.Kom, Fithri Rizki Khairani S.Kom, Fauzi Zulmi S.Kom, Dewi Ayu Pratami S.Kom, Nur Ainun S.Kom, Yudi Aron Pangaribuan, Ismail Fatha Lubis dan teman-teman satu stambuk lain yang telah memberikan motivasi, arahan dan perhatiannya.
10. Abangda Ahmad Royhan Putra S, S.Kom dan Sadam Husein S, S.Kom yang telah memberikan motivasi, arahan dan semangat kepada penulis selama menyelesaikan skripsi.
11. Rekan-rekan Demisioner pengurus IMILKOM 2012-2013 yang telah banyak memberikan dukungan kepada penulis.
12. Adik-adik junior stambuk 2010, 2011 dan 2012 yang selalu memberikan semangat dan dorongan kepada penulis selama menyelesaikan skripsi ini.
13. Pihak-pihak yang terlibat langsung maupun tidak langsung yang membantu penyelesaian laporan ini.
Semoga Allah SWT melimpahkan berkah kepada semua pihak yang telah memberikan bantuan, perhatian, serta dukungan kepada penulis dalam menyelesaikan skripsi ini. Akhirnya, semoga skripsi ini bermanfaat bagi pribadi, keluarga, masyarakat, organisasi dan negara.
Medan, Agustus 2014
M. Febri Rahmansyah
vi
ABSTRAK
Robot line follower adalah robot yang bergerak dengan bantuan sensor proximity untuk mendeteksi suatu garis dengan pola tertentu dan mengikuti lintasan yang telah ditentukan. Robot line follower pengantar makanan ini merupakan robot yang diciptakan untuk menggantikan peran seorang pelayan di rumah makan. Robot ini memiliki kemampuan untuk mengantarkan makanan dari home base menuju ke meja pesanan secara otomatis yang diimplementasikan menggunakan algoritma fuzzy. Robot line follower ini menggunakan Mikrokontroller ATMega32 dengan menggunakan bahasa pemrograman C Codevision AVR, 6 pasang sensor IRED (Infra Red Emitting Diode) dan photodioda, dan driver motor untuk mengendalikan 2 buah motor DC. Hasil yang diperoleh dari pengujian sistem ini adalah robot bergerak sesuai dengan data yang dihasilkan oleh algoritma fuzzy dan membuat robot bergerak teratur dari home base menuju ke meja pelanggan untuk mengantarkan makanan secara otomatis dengan mengikuti lintasan garis berwarna hitam. Dengan demikian robot line follower pengantar makanan ini nantinya diharapkan dapat membantu dan mempermudah pekerjaan manusia untuk mengantarkan makanan dengan cepat dan tepat.
vii
THE PROTOTYPE OF FOOD DELIVERY LINE FOLLOWER ROBOT BASED
USING FUZZY ALGORITHM ATMEGA32 MICROCONTROLLER
ABSTRACT
Line follower robot is a robot that moves with the help of proximity sensors to detect a line with a certain pattern and following a predetermined trajectory. Food delivery line follower robot is a robot that was created to replace the role of a waiter in a restaurant. This robot has the ability to deliver food from home base to the table to automatically order which is implemented using fuzzy algorithm. This line follower robot using microcontroller ATmega32 using the C programming language CodeVision AVR, 6 pairs of sensors IRED (Infra Red Emitting Diode) and a photodiode, and motor drivers to control two DC motors. The results obtained from testing of this system is the robot to move in accordance with the data produced by the fuzzy algorithm and make the robot move regularly from home base to the table to deliver food to customers automatically by following the black line trajectory. Thus the line follower robot introduction of these foods is expected to assist and facilitate the work of humans to deliver food quickly and precisely.
Keyword: Line Follower Robot, ATMega32, Sensors, Fuzzy Algorithm.
viii
DAFTAR ISI
Halaman
Persetujuan ii
Pernyataan iii
Penghargaan iv
Abstrak vi
Abstract vii
Daftar Isi viii
Daftar Tabel xi
Daftar Gambar xii
Daftar Lampiran xiv
Bab I Pendahuluan
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Batasan Masalah 2
1.4 Tujuan Penelitian 2
1.5 Manfaat Penelitian 3
1.6 Metode Penelitian 3
1.7 Sistematika Penulisan 4
Bab II Landasan Teori
2.1 Robotika 6
2.1.1 Sejarah Robot 6
2.1.2 Karakteristik Robot 6
2.1.3 Tipe Robot 7
2.1.4 Line Follower Robot (Robot Pengikut Garis) 7
2.2 Algoritma Fuzzy 8
2.2.1 Logika Fuzzy 8
2.3 Mikrokontroller ATMega32 9
2.3.1 Cara Kerja Mikrokontroller 14
2.4 Aktuator 15
2.4.1 Motor DC 15
2.4.2 Motor Servo 16
2.4.3 Driver Motor DC L298 17
2.5 Keypad Matriks 4x4 19
2.6 LCD LCD (Liquid Crystal Display) Karakter 16x2 19
2.7 Sensor 23
2.8 Cara Kerja Sensor Garis (Line Follower) 23
Bab III Analisis dan Perancangan
3.1 Analisis Sistem 24
3.1.1 Analisis Masalah 24
3.1.2 Analisis Kebutuhan (Requirement Analyst) 25
ix
3.1.2.2 Analisis NonFungsional 26
3.1.2.3 Pemodelan Persyaratan Sistem dengan Use Case 26
3.1.2.4 Activity Diagram 27
3.1.2.5 Sequence Diagram 29
3.2Perancangan Sistem 30
3.2.1Komponen yang digunakan Robot 30
3.2.2Perancangan Kontruksi Robot Line Follower 32
3.2.3Perancangan Kerangka Robot 32
3.2.4Perancangan Sensor Proximity 33
3.2.5Perancangan Lintasan Robot Line Follower 35
3.2.6Perancangan Aktuator Robot 36
3.2.7Perancangan Aktuator Servo 37
3.2.8Perancangan Sirkuit Elektronik 37
3.2.8.1Perancangan Rangkaian Sumber Tegangan 37 3.2.8.2Perancangan Mikrokontroller ATMega32 38
3.2.8.3Perancangan Push Button 40
3.2.8.4Perancangan LCD Karakter 16x2 41
3.2.8.5Perancangan Rangkaian Sensor Proximity 41 3.2.8.6Perancangan Rangkaian Driver Motor DC 42
3.2.9Perancangan Program Mikrokontroller 43
3.2.9.1Perancangan Program Robot Line Follower 44
3.2.9.2Perancangan Program Push Button 45
3.2.9.3Perancangan Algoritma Fuzzy 46
Bab IV Implementasi dan Pengujian
4.1Implementasi Sistem 47
4.1.1ImplementasiKerangka Robot Line Follower 47
4.1.2ImplementasiAktuator Robot 48
4.1.3ImplementasiCatu Daya 48
4.1.4Implementasi Sensor Priximity 49
4.1.5Implementasi Rangkaian Sirkuit Elektronik 49 4.1.6Implementasi Lintasan Robot Line Follower 55 4.1.7Implementasi Modul Program Mikrokontroller 55
4.1.7.1Rutin Program Pushbutton 56
4.1.7.2Rutin Program untuk Sensor Proximity 57 4.1.7.3Rutin Program untuk Aktuator Robot Line Follower 58
4.2Pengujian Sistem 58
4.2.1 Pengujian Input Robot 59
4.2.2 Pengujian Aktuator Robot 59
4.2.3 Pengujian Sensor Proxymity 60
4.2.4Pengujian Pergerakan Robot 62
4.2.4.1Pengujian Pergerakan Robot 62
4.2.4.2Pengujian Pergerakan Robot 63
4.2.4.3Pengujian Pergerakan Robot 63
4.2.4.4Pengujian Waktu 64
x
Bab V Kesimpulan dan Saran
5.1 Kesimpulan 66
5.2 Saran 66
xi
DAFTAR TABEL
Nomor
Tabel Nama Tabel Halaman
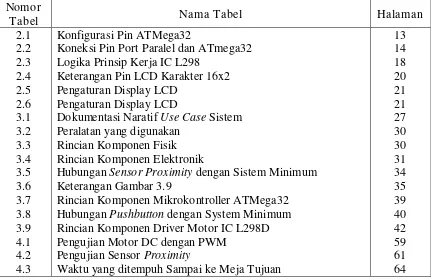
2.1
Konfigurasi Pin ATMega32
Koneksi Pin Port Paralel dan ATmega32 Logika Prinsip Kerja IC L298
Keterangan Pin LCD Karakter 16x2 Pengaturan Display LCD
Pengaturan Display LCD
Dokumentasi Naratif Use Case Sistem Peralatan yang digunakan
Rincian Komponen Fisik Rincian Komponen Elektronik
Hubungan Sensor Proximity dengan Sistem Minimum Keterangan Gambar 3.9
Rincian Komponen Mikrokontroller ATMega32 Hubungan Pushbutton dengan System Minimum Rincian Komponen Driver Motor IC L298D Pengujian Motor DC dengan PWM
Pengujian Sensor Proximity
Waktu yang ditempuh Sampai ke Meja Tujuan
xii
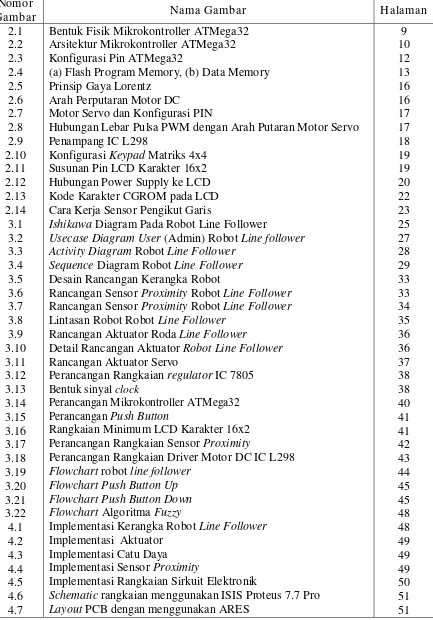
Bentuk Fisik Mikrokontroller ATMega32 Arsitektur Mikrokontroller ATMega32 Konfigurasi Pin ATMega32
(a) Flash Program Memory, (b) Data Memory Prinsip Gaya Lorentz
Arah Perputaran Motor DC Motor Servo dan Konfigurasi PIN
Hubungan Lebar Pulsa PWM dengan Arah Putaran Motor Servo Penampang IC L298
Konfigurasi Keypad Matriks 4x4 Susunan Pin LCD Karakter 16x2 Hubungan Power Supply ke LCD Kode Karakter CGROM pada LCD Cara Kerja Sensor Pengikut Garis
Ishikawa Diagram Pada Robot Line Follower
Usecase Diagram User (Admin)Robot Line follower Activity Diagram Robot Line Follower
Sequence Diagram Robot Line Follower
Desain Rancangan Kerangka Robot
Rancangan Sensor Proximity Robot Line Follower
Rancangan Sensor Proximity Robot Line Follower
Lintasan Robot Robot Line Follower
Rancangan Aktuator Roda Line Follower
Detail Rancangan Aktuator Robot Line Follower
Rancangan Aktuator Servo
Perancangan Rangkaian regulator IC 7805 Bentuk sinyal clock
Perancangan Mikrokontroller ATMega32 Perancangan Push Button
Rangkaian Minimum LCD Karakter 16x2 Perancangan Rangkaian Sensor Proximity
Perancangan Rangkaian Driver Motor DC IC L298
Flowchart robot line follower Flowchart Push Button Up Flowchart Push Button Down Flowchart Algoritma Fuzzy
Implementasi Kerangka Robot Line Follower
Implementasi Aktuator Implementasi Catu Daya ImplementasiSensor Proximity
ImplementasiRangkaian Sirkuit Elektronik
Schematic rangkaian menggunakan ISIS Proteus 7.7 Pro
Layout PCB dengan menggunakan ARES
xiii
Layout di Export kedalam Grafik
Hasil Printing Layout pada Kertas Glossy Proses Penyablonan Layout pada PCB Proses Pelarutan
Proses Pengeboran pada PCB
Proses Penempatan dan Penyolderan Komponen pada PCB Proses pengecekan dan pengujian komponen pada PCB Implementasi Lintasan Robot Line Follower
Proses Pembuatan Program Mikrokontroller Pengujian Aktuator Robot
Pengujian Sensor Poximity
Pengujian Pergerakan Robot Pengujian Pergerakan Robot Pengujian Pergerakan Robot
xiv
DAFTAR LAMPIRAN
Halaman
A. Listing Program A-1