MENGGUNAKAN ALGORITMA
FUZZY
SKRIPSI
M. FEBRI RAHMANSYAH
091401019
PROGRAM STUDI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah Sarjana Ilmu Komputer
M. FEBRI RAHMANSYAH 091401019
PROGRAM STUDI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
PERSETUJ UAN
Judul : PROTOTIPE ROBOT LINE FOLLOWER
PENGANTAR MAKANAN BERBASIS MIKROKONTROLLER ATMega32 MENGGUNAKAN ALGORITMA FUZZY
Kategori : SKRIPSI
Nama : M. FEBRI RAHMANSYAH
NomorIndukMahasiswa : 091401019
Program Studi : SARJANA (S1) ILMU KOMPUTER
Departemen : ILMU KOMPUTER
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI
INFORMASI Diluluskan di
Medan, Agustus 2014 Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Drs. Dahlan Sitompul, M.Eng Dr. PoltakSihombing, M.Kom NIP. 196707252005011002 NIP.196203171991031001
Diketahui/Disetujuioleh
Program Studi S1 IlmuKomputer Ketua,
PERNYATAAN
PROTOTIPE ROBOT LINE FOLLOWER PENGANTAR MAKANAN BERBASIS MIKROKONTROLLER ATMega32
MENGGUNAKAN ALGORITMA FUZZY
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing telah disebutkan sumbernya.
Medan, Agustus 2014
PENGHARGAAN
Alhamdulillahirrabbil’alamin. Puji dan syukur penulis ucapkan atas kehadirat Allah SWT yang telah memberikan limpahan rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan skripsi ini sebagai syarat untuk memperoleh gelar Sarjana Komputer, Program Studi Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara. Shalawat beriring salam penulis juga persembahkan kepada Nabi Besar Muhammad SAW.
Dengan segala kerendahan hati, pada kesempatan ini penulis menyampaikan terima kasih kepada semua pihak yang telah membantu penyelesaian skripsi dengan judul Prototipe Robot Line Follower Pengantar Makanan Berbasis Mikrokontroller ATMega32 Menggunakan Algoritma Fuzzy. Penulis mengucapkan terima kasih kepada:
1. Bapak Prof. Dr. Syahril Pasaribu, DTMH, MSc(CTM), SpA(K) sebagai Rektor Universitas Sumatera Utara (USU).
2. Bapak Prof.Dr.Muhammad Zarlis selaku Dekan Fasilkom-TI Universitas Sumatera Utara dan Pembimbing Akademik.
3. Bapak Dr. Poltak Sihombing, M.Kom sebagai Ketua Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara dan sekaligus sebagai Dosen Pembimbing I.
4. Ibu Maya Silvi Lydia, BSc. MSc sebagai Sekretaris Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara.
5. Bapak Drs. Dahlan Sitompul, M.Eng selaku dosen pembimbing yang telah memberikan arahan dan motivasi kepada penulis dalam pengerjaan skripsi ini. 6. Ibu Dian Wirdasari, S.Si, M.Kom dan Bapak Drs. Muhammad Firdaus, M.Si
sebagai dosen penguji yang telah memberikan saran dan kritik kepada penulis dalam penyempurnaan skripsi ini.
7. Seluruh Dosen serta Staf Pegawai di Program Studi S1 Ilmu Komputer Fasilkom-TI USU.
9. Teman-teman seperjuangan mahasiswa S1-Ilmu Komputer stambuk 2009, Mustika Agung Maulana S.Kom, Azhar Indra Rifangi S.Kom, Gamal Nasir S.Kom, Dewa Made Suryadharma S.Kom, Fithri Rizki Khairani S.Kom, Fauzi Zulmi S.Kom, Dewi Ayu Pratami S.Kom, Nur Ainun S.Kom, Yudi Aron Pangaribuan, Ismail Fatha Lubis dan teman-teman satu stambuk lain yang telah memberikan motivasi, arahan dan perhatiannya.
10. Abangda Ahmad Royhan Putra S, S.Kom dan Sadam Husein S, S.Kom yang telah memberikan motivasi, arahan dan semangat kepada penulis selama menyelesaikan skripsi.
11. Rekan-rekan Demisioner pengurus IMILKOM 2012-2013 yang telah banyak memberikan dukungan kepada penulis.
12. Adik-adik junior stambuk 2010, 2011 dan 2012 yang selalu memberikan semangat dan dorongan kepada penulis selama menyelesaikan skripsi ini.
13. Pihak-pihak yang terlibat langsung maupun tidak langsung yang membantu penyelesaian laporan ini.
Semoga Allah SWT melimpahkan berkah kepada semua pihak yang telah memberikan bantuan, perhatian, serta dukungan kepada penulis dalam menyelesaikan skripsi ini. Akhirnya, semoga skripsi ini bermanfaat bagi pribadi, keluarga, masyarakat, organisasi dan negara.
Medan, Agustus 2014
ABSTRAK
Robot line follower adalah robot yang bergerak dengan bantuan sensor proximity untuk mendeteksi suatu garis dengan pola tertentu dan mengikuti lintasan yang telah ditentukan. Robot line follower pengantar makanan ini merupakan robot yang diciptakan untuk menggantikan peran seorang pelayan di rumah makan. Robot ini memiliki kemampuan untuk mengantarkan makanan dari home base menuju ke meja pesanan secara otomatis yang diimplementasikan menggunakan algoritma fuzzy. Robot line follower ini menggunakan Mikrokontroller ATMega32 dengan menggunakan bahasa pemrograman C Codevision AVR, 6 pasang sensor IRED (Infra Red Emitting Diode) dan photodioda, dan driver motor untuk mengendalikan 2 buah motor DC. Hasil yang diperoleh dari pengujian sistem ini adalah robot bergerak sesuai dengan data yang dihasilkan oleh algoritma fuzzy dan membuat robot bergerak teratur dari home base menuju ke meja pelanggan untuk mengantarkan makanan secara otomatis dengan mengikuti lintasan garis berwarna hitam. Dengan demikian robot line follower pengantar makanan ini nantinya diharapkan dapat membantu dan mempermudah pekerjaan manusia untuk mengantarkan makanan dengan cepat dan tepat.
THE PROTOTYPE OF FOOD DELIVERY LINE FOLLOWER ROBOT BASED USING FUZZY ALGORITHM ATMEGA32 MICROCONTROLLER
ABSTRACT
Line follower robot is a robot that moves with the help of proximity sensors to detect a line with a certain pattern and following a predetermined trajectory. Food delivery line follower robot is a robot that was created to replace the role of a waiter in a restaurant. This robot has the ability to deliver food from home base to the table to automatically order which is implemented using fuzzy algorithm. This line follower robot using microcontroller ATmega32 using the C programming language CodeVision AVR, 6 pairs of sensors IRED (Infra Red Emitting Diode) and a photodiode, and motor drivers to control two DC motors. The results obtained from testing of this system is the robot to move in accordance with the data produced by the fuzzy algorithm and make the robot move regularly from home base to the table to deliver food to customers automatically by following the black line trajectory. Thus the line follower robot introduction of these foods is expected to assist and facilitate the work of humans to deliver food quickly and precisely.
DAFTAR ISI
1.4 Tujuan Penelitian 2
1.5 Manfaat Penelitian 3
1.6 Metode Penelitian 3
1.7 Sistematika Penulisan 4
Bab II Landasan Teori
2.1 Robotika 6
2.1.1 Sejarah Robot 6
2.1.2 Karakteristik Robot 6
2.1.3 Tipe Robot 7
2.1.4 Line Follower Robot (Robot Pengikut Garis) 7
2.2 Algoritma Fuzzy 8
2.2.1 Logika Fuzzy 8
2.3 Mikrokontroller ATMega32 9
2.3.1 Cara Kerja Mikrokontroller 14
2.4 Aktuator 15
2.4.1 Motor DC 15
2.4.2 Motor Servo 16
2.4.3 Driver Motor DC L298 17
2.5 Keypad Matriks 4x4 19
2.6 LCD LCD (Liquid Crystal Display) Karakter 16x2 19
2.7 Sensor 23
2.8 Cara Kerja Sensor Garis (Line Follower) 23
Bab III Analisis dan Perancangan
3.1 Analisis Sistem 24
3.1.1 Analisis Masalah 24
3.1.2 Analisis Kebutuhan (Requirement Analyst) 25
3.1.2.2 Analisis NonFungsional 26 3.1.2.3 Pemodelan Persyaratan Sistem dengan Use Case 26
3.1.2.4 Activity Diagram 27
3.1.2.5 Sequence Diagram 29
3.2Perancangan Sistem 30
3.2.1Komponen yang digunakan Robot 30
3.2.2Perancangan Kontruksi Robot Line Follower 32
3.2.3Perancangan Kerangka Robot 32
3.2.4Perancangan Sensor Proximity 33
3.2.5Perancangan Lintasan Robot Line Follower 35
3.2.6Perancangan Aktuator Robot 36
3.2.7Perancangan Aktuator Servo 37
3.2.8Perancangan Sirkuit Elektronik 37
3.2.8.1Perancangan Rangkaian Sumber Tegangan 37 3.2.8.2Perancangan Mikrokontroller ATMega32 38
3.2.8.3Perancangan Push Button 40
3.2.8.4Perancangan LCD Karakter 16x2 41
3.2.8.5Perancangan Rangkaian Sensor Proximity 41 3.2.8.6Perancangan Rangkaian Driver Motor DC 42
3.2.9Perancangan Program Mikrokontroller 43
3.2.9.1Perancangan Program Robot Line Follower 44
3.2.9.2Perancangan Program Push Button 45
3.2.9.3Perancangan Algoritma Fuzzy 46
Bab IV Implementasi dan Pengujian
4.1Implementasi Sistem 47
4.1.1ImplementasiKerangka Robot Line Follower 47
4.1.2ImplementasiAktuator Robot 48
4.1.3ImplementasiCatu Daya 48
4.1.4Implementasi Sensor Priximity 49
4.1.5Implementasi Rangkaian Sirkuit Elektronik 49 4.1.6Implementasi Lintasan Robot Line Follower 55 4.1.7Implementasi Modul Program Mikrokontroller 55
4.1.7.1Rutin Program Pushbutton 56
4.1.7.2Rutin Program untuk Sensor Proximity 57 4.1.7.3Rutin Program untuk Aktuator Robot Line Follower 58
4.2Pengujian Sistem 58
4.2.1 Pengujian Input Robot 59
4.2.2 Pengujian Aktuator Robot 59
4.2.3 Pengujian Sensor Proxymity 60
4.2.4Pengujian Pergerakan Robot 62
4.2.4.1Pengujian Pergerakan Robot 62
4.2.4.2Pengujian Pergerakan Robot 63
4.2.4.3Pengujian Pergerakan Robot 63
Bab V Kesimpulan dan Saran
5.1 Kesimpulan 66
5.2 Saran 66
DAFTAR TABEL
Nomor
Tabel Nama Tabel Halaman
2.1
Koneksi Pin Port Paralel dan ATmega32 Logika Prinsip Kerja IC L298
Keterangan Pin LCD Karakter 16x2 Pengaturan Display LCD
Pengaturan Display LCD
Dokumentasi Naratif Use Case Sistem Peralatan yang digunakan
Rincian Komponen Fisik Rincian Komponen Elektronik
Hubungan Sensor Proximity dengan Sistem Minimum Keterangan Gambar 3.9
Rincian Komponen Mikrokontroller ATMega32 Hubungan Pushbutton dengan System Minimum Rincian Komponen Driver Motor IC L298D Pengujian Motor DC dengan PWM
Pengujian Sensor Proximity
Waktu yang ditempuh Sampai ke Meja Tujuan
DAFTAR GAMBAR
(a) Flash Program Memory, (b) Data Memory Prinsip Gaya Lorentz
Arah Perputaran Motor DC Motor Servo dan Konfigurasi PIN
Hubungan Lebar Pulsa PWM dengan Arah Putaran Motor Servo Penampang IC L298
Konfigurasi Keypad Matriks 4x4 Susunan Pin LCD Karakter 16x2 Hubungan Power Supply ke LCD Kode Karakter CGROM pada LCD Cara Kerja Sensor Pengikut Garis
Ishikawa Diagram Pada Robot Line Follower
Usecase Diagram User (Admin)Robot Line follower Activity Diagram Robot Line Follower
Sequence Diagram Robot Line Follower Desain Rancangan Kerangka Robot
Rancangan Sensor Proximity Robot Line Follower Rancangan Sensor Proximity Robot Line Follower Lintasan Robot Robot Line Follower
Rancangan Aktuator Roda Line Follower
Detail Rancangan Aktuator Robot Line Follower Rancangan Aktuator Servo
Perancangan Rangkaian regulator IC 7805 Bentuk sinyal clock
Perancangan Mikrokontroller ATMega32 Perancangan Push Button
Rangkaian Minimum LCD Karakter 16x2 Perancangan Rangkaian Sensor Proximity
Perancangan Rangkaian Driver Motor DC IC L298 Flowchart robot line follower
Flowchart Push Button Up Flowchart Push Button Down Flowchart Algoritma Fuzzy
Implementasi Kerangka Robot Line Follower Implementasi Aktuator
Implementasi Catu Daya ImplementasiSensor Proximity
ImplementasiRangkaian Sirkuit Elektronik
Schematic rangkaian menggunakan ISIS Proteus 7.7 Pro Layout PCB dengan menggunakan ARES
4.8
Layout di Export kedalam Grafik
Hasil Printing Layout pada Kertas Glossy Proses Penyablonan Layout pada PCB Proses Pelarutan
Proses Pengeboran pada PCB
Proses Penempatan dan Penyolderan Komponen pada PCB Proses pengecekan dan pengujian komponen pada PCB Implementasi Lintasan Robot Line Follower
DAFTAR LAMPIRAN
Halaman
A. Listing Program A-1
ABSTRAK
Robot line follower adalah robot yang bergerak dengan bantuan sensor proximity untuk mendeteksi suatu garis dengan pola tertentu dan mengikuti lintasan yang telah ditentukan. Robot line follower pengantar makanan ini merupakan robot yang diciptakan untuk menggantikan peran seorang pelayan di rumah makan. Robot ini memiliki kemampuan untuk mengantarkan makanan dari home base menuju ke meja pesanan secara otomatis yang diimplementasikan menggunakan algoritma fuzzy. Robot line follower ini menggunakan Mikrokontroller ATMega32 dengan menggunakan bahasa pemrograman C Codevision AVR, 6 pasang sensor IRED (Infra Red Emitting Diode) dan photodioda, dan driver motor untuk mengendalikan 2 buah motor DC. Hasil yang diperoleh dari pengujian sistem ini adalah robot bergerak sesuai dengan data yang dihasilkan oleh algoritma fuzzy dan membuat robot bergerak teratur dari home base menuju ke meja pelanggan untuk mengantarkan makanan secara otomatis dengan mengikuti lintasan garis berwarna hitam. Dengan demikian robot line follower pengantar makanan ini nantinya diharapkan dapat membantu dan mempermudah pekerjaan manusia untuk mengantarkan makanan dengan cepat dan tepat.
THE PROTOTYPE OF FOOD DELIVERY LINE FOLLOWER ROBOT BASED USING FUZZY ALGORITHM ATMEGA32 MICROCONTROLLER
ABSTRACT
Line follower robot is a robot that moves with the help of proximity sensors to detect a line with a certain pattern and following a predetermined trajectory. Food delivery line follower robot is a robot that was created to replace the role of a waiter in a restaurant. This robot has the ability to deliver food from home base to the table to automatically order which is implemented using fuzzy algorithm. This line follower robot using microcontroller ATmega32 using the C programming language CodeVision AVR, 6 pairs of sensors IRED (Infra Red Emitting Diode) and a photodiode, and motor drivers to control two DC motors. The results obtained from testing of this system is the robot to move in accordance with the data produced by the fuzzy algorithm and make the robot move regularly from home base to the table to deliver food to customers automatically by following the black line trajectory. Thus the line follower robot introduction of these foods is expected to assist and facilitate the work of humans to deliver food quickly and precisely.
1.1 Latar Belakang
Teknologi adalah cara untuk mendapatkan sesuatu dengan kualitas lebih baik (lebih mudah, lebih murah, lebih cepat dan lebih menyenangkan). Salah satu teknologi yang berkembang pesat saat ini adalah teknologi di bidang robotika. Robot berguna untuk membantu manusia dalam melakukan pekerjaan tertentu misalnya untuk melakukan pekerjaan yang memerlukan ketelitian tinggi, beresiko tinggi, membosankan atau yang membutuhkan tenaga besar[8].
Kemajuan ilmu pengetahuan dan teknologi telah mendorong manusia untuk berusaha mengatasi segala permasalahan yang timbul di sekitarnya, termasuk dalam kasus sebuah rumah makan atau restoran. Masalah umum yang biasa dihadapi dalam kinerja rumah makan adalah pengiriman makanan (food delivery) ke meja pelanggan. Beberapa rumah makan bermasalah dengan jumlah pegawai yang mengantar makanan ke meja pelanggan. Namun dengan adanya teknologi bidang robotika, kini masalah tersebut dapat diatasi.
Robotika bukanlah sesuatu yang baru saat ini, sehingga pengembangan dari robot ini sudah banyak dilakukan dalam segala hal pengaplikasiannya. Dimana hampir di semua kalangan meminati dan juga menggunakannya. Salah satunya adalah robot pengikut garis (line follower robot).
Robot pengikut garis (line follower) merupakan salah satu bentuk robot bergerak otonom yang banyak dirancang baik untuk penelitian, industri maupun kompetisi robot. Sesuai dengan namanya, robot line follower akan bergerak mengikuti jalur/garis/lintasan yang telah dibentuk serupa dengan mapping suatu tempat.
yang berjudul “Prototipe Robot Line Follower Pengantar Makanan Berbasis Mikrokontroller ATMega32 Menggunakan Algoritma Fuzzy”, yang diharapkan robot line follower pengantar makanan ini bisa membantu dan mempermudah pekerjaan manusia dalam mengantarkan makanan secara tepat, cepat dengan mengikuti jalur/garis/lintasan yang telah ditentukan. Algoritma yang akan digunakan dalam penelitian ini adalah algoritma fuzzy, dimana robot akan bergerak dari home base ke meja pelanggan untuk mengantarkan makanan sesuai lintasan yang dihasilkan oleh algoritma fuzzy sehingga robot tidak akan melintasi keseluruhan mapping yang ada.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah dipaparkan, rumusan masalah dalam penelitian ini adalah bagaimana cara membuat sebuah prototipe berupa robot line follower pengantar makanan yang mampu digunakan dalam melakukan tugas mengantar makanan di sebuah rumah makan, dengan mengikuti jalur/garis/lintasan yang telah ditentukan, menggunakan Mikrokontroller ATMega32 dengan algoritma fuzzy.
1.3 Batasan Masalah
Adapun dalam penelitian tugas akhir ini, penulis memberikan batasan-batasan yaitu: 1. Algoritma yang digunakan adalah algoritma fuzzy
2. Robot pengantar makanan yang dibuat hanya akan berjalan di area yang telah ditentukan berupa mapping lintasan yang dibuat dengan garis berwarna hitam. 3. Jauh posisi meja sudah ditentukan.
4. Bahasa pemrograman yang digunakan adalah bahasa C Codevision AVR. 5. Robot hanya mengantarkan makanan.
6. Jumlah meja makan yang digunakan sebanyak 6 buah meja.
1.4 Tujuan Penelitian
1.5 Manfaat Penelitian
Adapun manfaat yang dapat diambil dari pembuatan robot pengantar makanan menggunakan Mikrokontroller ATMega32 dengan algoritma fuzzy adalah sebagai berikut :
1. Mengetahui membuat robot line follower pengantar makanan yang berbasis mikrokontroller ATMega32 menggunakan algoritma fuzzy.
2. Mengetahui cara kerja mikrokontroller ATMega32 pada pembuatan robot pengantar makanan dengan jarak posisi meja yang telah ditentukan.
1.6 Metode Penelitian
Penelitian ini menerapkan beberapa metode penelitian sebagai berikut: 1. Studi Literatur
Pada tahap ini akan dilakukan pengumpulan bahan referensi yang terkait dengan algoritma Fuzzy dan mikrokontroller ATMega32 yang berupa buku-buku, artikel-artikel atau e-book serta jurnal nasional dan internasional yang didapatkan melalui internet.
2. Pengumpulan dan Analisa Data
Pada tahap ini dilakukan pengumpulan dan analisa data yang berhubungan dengan penelitian ini seperti datasheet yang merupakan penjelasan dari mikrokontroller ATMega32 dan cara kerja komponen yang digunakan serta data alur pengantaran makanan pada rumah makan.
3. Perancangan Sistem
Merancang sistem sesuai dengan rencana yang telah ditentukan, yaitu meliputi perancangan desain robot, hardware, dan software. Proses perancangan ini berdasarkan pada batasan masalah dari penelitian ini.
4. Implementasi Sistem
5. Pengujian Sistem
Pada tahap ini akan dilakukan pengujian terhadap sistem yang telah dikembangkan.
6. Dokumentasi Sistem
Melakukan pembuatan dokumentasi sistem mulai dari tahap awal hingga pengujian sistem, untuk selanjutnya dibuat dalam bentuk laporan penelitian (skripsi).
1.7 Sistematika Penulisan
Agar pembahasan lebih sistematis, maka tulisan ini dibuat dalam lima bab, yaitu: BAB I PENDAHULUAN
Bab ini akan menjelaskan mengenai latar belakang masalah yang dibahas dalam skripsi ini, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metode penelitian, dan sistematika penulisan skripsi.
BAB II LANDASAN TEORI
Bab ini merupakan tinjauan teoritis yang berkaitan dengan Robotika, Algoritma fuzzy, Mikrokontroler ATMega32, Aktuator robot (Motor DC, Driver motor DC L298), Keypad Matriks 4x4, LCD Karakter 16x2, dan Sensor Proximity.
BAB III ANALISIS DAN PERANCANGAN
Bab ini membahas mengenai tentang analisis dan perancangan sistem dalam prototipe robot line follower pengantar makanan berbasis mikrokontroller ATMega32 menggunakan algoritma fuzzy. Model Unified Modelling Language (UML) yang digunakan antara lain use case diagram, activity diagram, dan sequence diagram. Juga dibahas komponen yang digunakan robot, perancangan konstruksi robot, aktuator, sensor proximity, sirkuit elektronik robot dan perangkat lunak robot.
BAB IV IMPLEMENTASI DAN PENGUJ IAN
BAB V KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
2.1 Robotika 2.1.1 Sejarah Robot
Kata robot berasal dari Czech yaitu robot yang berarti bekerja. Istilah ini diperkenalkan ke publik oleh Karel Capek pada saat mementaskan RUR (Rossum’s Universals Robots) pada tahun 1921. Robot adalah peralatan eletro-mekanik atau bio-mekanik, atau gabungan peralatan yang menghasilkan gerakan yang otonomi maupun gerakan berdasarkan gerakan yang diperintahkan[3].
Awal kemunculan robot dapat dirunut dari bangsa Yunani kuno yang membuat patung yang dapat dipindah-pindah. Pada tahun 270 SM, Ctesibus seorang insinyur Yunani, membuat organ dan jam air dengan komponen yang dapat dipindahkan. Pada zaman Nabi Muhammad SAW telah dibuat mesin perang dengan menggunakan roda dan dapat melontarkan bom. Bahkan Al-Jajari (1136-1206), seorang ilmuan Islam pada dinasti Artuqid, dianggap sebagai tokoh yang pertama kali menciptakan robot humanoid yang berfungsi sebagai 4 musisi.
Robot adalah rangkaian peralatan mekanika dan elektronika yang di rangkai bersama-sama yang bekerja dan beroperasi sesuai dengan instruksi atau program. Robot yang selama ini kita kenal adalah sebuah mesin berbentuk manusia yang dapat berbicara dan berjalan layaknya manusia. Robot tersebut adalah salah satu jenis robot berdasarkan bentuknya yaitu kategori Android. Robot jenis ini berbentuk seperti kendaraan yang dilengkapi dengan roda dan bergerak seperti sebuah mobil.
2.1.2 Karakteristik Robot
Sebuah robot umumnya memiliki karakteristik sebagai berikut [3]:
2. Mampu Bergerak : Robot umumnya bergerak dengan menggunakan kaki atau roda, dan pada beberapa kasus robot dapat terbang dan berenang.
3. Cerdas : Robot memiliki kecerdasan buatan agar dapat memutuskan aksi yang tepat dan akurat.
4. Membutuhkan Energi yang Memadai : Robot membutuhkan catu daya yang memadai.
2.1.3 Tipe Robot
Robot didesain dan dibuat sesuai kebutuhan pengguna. Robot, hingga saat ini, secara umum dibagi menjadi beberapa tipe sebagai berikut [3]:
1. Robot manipulator
2. Robot mobil (mobile robot) a. Robot daratan (ground robot)
Robot beroda Robot berkaki
b. Robot air (submarine robot) c. Robot terbang (aerial robot)
Robot manipulator biasanya dicirikan dengan memiliki lengan (arm robot). Robot ini biasanya diterapkan pada dunia industri, seperti pada industri otomotif, elektronik dan komputer. Sedangkan robot mobil mengarah ke robot yang bergerak, meskipun nantinya robot ini juga memiliki manipulator.
2.1.4 Line Follower Robot (Robot Pengikut Garis)
Line follower robot adalah robot yang didesain untuk dapat berjalan mengikuti garis yang membentuk sebuah alur mapping tertentu (biasanya garis yang dipakai berwana hitam atau putih)[4]. Beberapa hal yang perlu dalam merancang line follower robot ini adalah mekanika, elektronik, dan algoritma (software) dari robot.
2x16 sebagai output, dan main board yang terdiri dari mikrokontroler ATMega32 dan driver motor DC.
2.2Algoritma Fuzzy 2.2.1 Logika Fuzzy
Logika fuzzy pertama kali dikembangkan oleh Prof. Lotfi A. Zadeh, seorang peneliti dari Universitas California, pada tahun 1960-an. Logika fuzzy dikembangkan dari teori himpunan fuzzy [2].
Fuzzy secara bahasa diartikan sebagai kabur atau samar-samar. Suatu nilai dapat bernilai besar atau salah secara bersamaan. Dalam fuzzy dikenal derajat keanggotaan yang memiliki rentang nilai 0 (nol) hingga 1(satu). Berbeda dengan himpunan tegas yang memiliki nilai 1 atau 0 (ya atau tidak) [17].
Logika Fuzzy merupakan seuatu logika yang memiliki nilai kekaburan atau kesamaran (fuzzyness) antara benar atau salah. Dalam teori logika fuzzy suatu nilai bias bernilai benar atau salah secara bersama. Namun berapa besar keberadaan dan kesalahan suatu tergantung pada bobot keanggotaan yang dimilikinya. Logika fuzzy memiliki derajat keanggotaan dalam rentang 0 hingga 1. Berbeda dengan logika digital yang hanya memiliki dua nilai 1 atau 0. Logika fuzzy digunakan untuk menterjemahkan suatu besaran yang diekspresikan menggunakan bahasa (linguistic), misalkan besaran kecepatan laju kendaraan yang diekspresikan dengan pelan, agak cepat, cepat, dan sangat cepat. Logika fuzzy menunjukan sejauh mana suatu nilai itu benar dan sejauh mana suatu nilai itu salah. Tidak seperti logika klasik (scrisp)/tegas, suatu nilai hanya mempunyai 2 kemungkinan yaitu merupakan suatu anggota himpunan atau tidak. Derajat keanggotaan 0 (nol) artinya nilai bukan merupakan anggota himpunan dan 1 (satu) berarti nilai tersebut adalah anggota himpunan.
Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang input kedalam suatu ruang output, mempunyai nilai kontinyu. Fuzzy dinyatakan dalam derajat dari suatu keanggotaan dan derajat dari kebenaran. Oleh sebab itu sesuatu dapat dikatakan sebagian benar dan sebagian salah pada waktu yang sama (Kusumadewi. 2004).
seperti "sedikit", "lumayan" dan "sangat" (Zadeh 1965). Kelebihan dari teori logika fuzzy adalah kemampuan dalam proses penalaran secara bahasa (linguistic reasoning). Sehingga dalam perancangannya tidak memerlukan persamaan matematik dari objek yang akan dikendalikan.
2.3 Mikrokontroller ATMega32
Mikrokontroller merupakan sebuah kombinasi dari sebuah CPU, memori dan I/O yang terintegrasi dalam bentuk sebuah IC atau dapat disebut dengan single Chip. Mikrokontroller AVR (Alf and Vegard’s Risc Processor) standart memiliki arsitektur 8 – bit, dimana semua intruksi dikemas dalam kode 16 – bit dan sebagian besar intruksi dalam
1 (satu) siklus clock. AVR berteknologi RISC (Reduced Intruction Set Computing)[8].
Kontrol utama dari keseluruhan sistem pada penelitian ini ditangani oleh mikrokontroler AVR (Alf and Vegard’s Risc Processor) ATmega32. Mikrokontroler ini memiliki arsitektur 8 bit, dimana semua instruksi dikemas dalam kode 16 – bit, dan sebagian besar instruksinya dieksekusi dalam satu siklus clock. Kelebihan dari ATmega32 sehingga digunakan sebagai kontrol utama adalah sebagai berikut[8]:
1. Mempunyai performa yang tinggi (berkecepatan akses maksimum 16MHz) tetapi hemat daya.
2. Memori untuk program flash cukup besar yaitu 32Kb. 3. Memori internal (SRAM) cukup besar yaitu 2Kb. 4. Mendukung hubungan serial SPI.
5. Tersedia 3 channel timer/counter (2 untuk 8 bits dan 1 untuk 16 bits).
Gambar 2.1 Bentuk Fisik Mikrokontroller ATMega32[8] Mikrokontroler Keluarga AVR secara umum dikelompokkan menjadi 6 (enam) kelompok, yaitu[15] :
b. Keluarga AT90Sxx : Merupakan mikrokontroler yang pertama kali dibuat oleh Atmel Corp.
c. keluarga ATMega : Merupakan pengembangan mikrokontroler AT90Sxx dengan fitur yang lebih banyak.
d. Keluarga AT86RFxx : Merupakan mikrokontroler berorientasi desai minimal. e. Keluarga AT90USBxx : Merupakan mikrokontroler yang berorientasi
pemrograman USB.
f. Keluarga AVR 32 Bit contohnya AP7000, UC3Axxxx, UC3Bxxx, UC3Lxx, dsb : Merupakan mikrokontroler dengan register dan instruksi dengan panjang 32 bit.
Mikrokontroler ATMega32 adalah keluarga dari ATMega yang memiliki Arsitektur seperti gambar 2.2 berikut :
Fitur-fitur yang dimiliki oleh ATMega32 adalah sebagai berikut[15]: a. Performa tinggi, mikrokontroler berdaya rendah.
b. Mikrokontroler dengan arsitektur RISC 8 bit.
1. 131 kode instruksi dalam bahasa assembly, hampir semua membutuhkan satu clock untuk eksekusi.
2. Mempunyai 32 x 8 bit register kerja kegunaan umum.
3. Pengoprasian full static, artinya clock dapat diperlambat, bahkan dihentikan sehingga chip berada dalam kondisi sleep. CMOS juga lebih tahan terhadap noise.
4. Kecepatan mengeksekusi sampai dengan 16 mega instruksi per detik pada saat diberikan osilator sebesar 16 MHZ.
5. Terdapat rangkaian pengali 2 (dua) kali untuk siklus kerjanya di dalam chip. c. Flash EEPROM (Electrically Eraseable Programmable Read Only Memory)
sebesar 32 kilobyte yang dapat diprogram ulang dan dengan kemampuan Read While Write.
d. Ketahanan hapus-tulis Flash ROM adalah 10.000 kali dengan pengaturan pilihan kode boot dan Lock Bit yang independen.
e. Memori SRAM sebesar 2 kilobyte yang dapat dihapus-tulis 100.000 kali.
f. Penguncian kode program untuk keamanan perangakat lunak agar tidak dapat dibaca.
g. Memori yang non-volatile EEPROM sebesar 1024 byte.
h. Memiliki 2 buah timer/counter 8 bit sebanyak 2 buah dan sebuah timer/counter 16 bit dengan opsi PWM sebanyak 4 kanal.
i. Memiliki 8 kanal Analog to Digital Converter 10 bit dengan jenis single ended. j. Untuk kemasan TQFP ADC dapat diatur 7 buah kanal jenis diferensial dan
khusus 2 kanal dengan penguatan yang dapat diatur melalui registernya sebesar 1x, 10x atau 20x.
k. Antarmuka komunikasi serial USART yang dapat diprogram dengan kecepatan maksimal 2,5 Mbps.
l. Antarmuka SPI master / slave.
m. Watchdog timer dengan osilator di dalam chip yang dapat diprogram. n. Komparator Analog di dalam chip.
p. Osilator RC internal yang terkalibrasi. q. Sumber interupsi internal dan eksternal.
r. Pilihan Mode sleep : idle, pereduksi noise ADC, penghematan daya konsumsi, penurunan daya, kondisi standby.
s. 32 Pin masukan dan keluaran terprogram.
t. Terdapat pilihan kemasan PDIP 40 pin,TQFP 44 kaki, QFN/MLF 44 titik. u. Tegangan pengoprasian
1. 2,7 – 5,5 Volt untuk ATMega32L 2. 4,5 – 5,5 Volt untuk ATMega32 v. Kecepatan
1. 0 – 8 MHz untuk ATMega32L 2. 0 – 16 MHz untuk ATMega32
w. Konsumsi daya pada 1 MHz, 3 Volt, suhu 25o C untuk ATMega32L. 1. Aktif : 1,1 Miliampere
2. Mode idle : 0,35 Miliampere
3. Mode power down : kurang dari 1 Mikroampere ATMega32 dapat dilihat pada Gambar 2.3 berikut.
Konfigurasi Pin ATMega32 dapat dilihat pada table 2.1 berikut: Tabel 2.1 Konfigurasi Pin ATMega32
Nomor Pin Nama Fungsi
10 VCC Catu daya positif
11, 31 GND Catu daya negative/ground
30 AVCC Catu daya positif untuk ADC internal
32 AREF Pin untuk tegangan referensi AADC
1 – 8 PB7…PB0 Pin masukan dan keluaran Port B
33 – 40 PA7…PA0 Pin masukan dan keluaran Port A
14 – 21 PD7…PD0 Pin masukan dan keluaran Port D
22 – 29 PC7…PC0 Pin masukan dan keluaran Port C
9 RESET Pin masukan untuk reset (active low)
12, 13 XTAL1 dan 2 Pin untuk masukan osilator eksternal
Memori ATMega32 dapat dilihat pada gambar 2.4 berikut:
(a) (b)
Untuk dapat menggunakan atau mengoprasikan mikrokontroller ATMega32, harus dibuat sistem minimum yang meliputi komponen antara lain : sumber tegangan (Vcc) sebesar 5V DC, Ground (Gnd) dan sistem reset. Mikrokontroller ATMega32 memiliki clock generator internal sebesar 1 MHz, sehingga mikrokontroller ini dapat bekerja langsung tanpa harus menggunakan clock external.
Untuk membuat program mikrokotroler ATMega32 digunakan editor dan compiler untuk bahasa C. Dalam pembahasan ini editor dan compiler yang digunakan adalah WinAVR. Setelah proses pembuatan dan kompilasi program selesai dilakukan akan diperoleh file intel hex (*.hex). File ini adalah file yang nantinya akan diprogramkan ke mikrokontroler ATMega32 melalui interface bsd programmer (Brian Dean's Programmer) yang terhubung ke komputer melalui antarmuka port paralel komputer. Koneksi antara ATmega32 dan port paralel untuk bsd programmer diberikan oleh tabel 2.2.
Tabel 2.2 Koneksi Pin Port Paralel dan ATmega32
Port Paralel ATMega32
2.3.1 Car a Kerja Mikrokontroller
Prinsip kerja mikrokontroler adalah sebagai berikut:
Berdasarkan nilai yang berada pada register Program Counter, mikrokontroler mengambil data pada ROM dengan alamat sebagaimana yang tertera pada register Program Counter. Selanjutnya isi dari register Program Counter ditambah dengan satu (Increment) secara otomatis.
Data yang diambil pada ROM merupakan urutan instruksi program yang telah dibuat dan diisikan sebelumnya oleh pengguna.
pada register, RAM, isi Port, atau melakukan pembacaan dan dilanjutkan dengan pengubahan data.
Program Counter telah berubah nilainya (baik karena penambahan otomatis pada langkah 1, atau karena pengubahan-pengubahan pada langkah 2). Selanjutnya yang dilakukan oleh mikrokontroler adalah mengulang kembali siklus ini pada langkah 1. Demikian seterusnya hingga power dimatikan.
2.4 Aktuator
Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator biasanya merupakan peranti elektromekanik yang menghasilkan gaya gerakan. Aktuator terdiri dari 2 jenis, yaitu[3]:
1. Aktuator elektrik
2. Aktuator pneumatik dan hidrolik.
Pada penelitian ini aktuator yang akan digunakan adalah aktuator elektrik yang berupa motor DC yang akan dijelaskan sebagai berikut :
2.4.1 Motor DC
Motor DC adalah suatu mesin yang berfungsi untuk mengubah energi listik arus searah menjadi energi gerak atau energi mekanik. Motor yang paling sederhana untuk pengaktifannya. Motor DC terdiri dari dua bagian utama, yaitu rotor dan stator. Rotor adalah bagian yang berputar atau armature, berupa koil dimana arus listrik dapat mengalir. Stator adalah bagian yang tetap dan menghasilkan medan magnet dari koilnya[3].
Gambar 2.5 Prinsip Gaya Lorentz[18] (Sumber: ht t p:/ / hyperphysics.phy-ast r.gsu.edu)
Dengan berdasarkan pada prinsip gaya Lorentz, memberikan tegangan pada DC motor akan membuat motor berputar secara kontinyu ke arah tertentu. Membalik arah putaran motor dapat dilakukan dengan mengubah polaritas arus yang mengalir pada motor. Gambar 2.6 memperlihatkan arah perputaran motor DC berdasarkan polaritas arus yang mengalir.
Gambar 2.6 Ar ah perputaran motor DC[18]
Motor DC biasanya mempunyai kecepatan putar yang cukup tinggi dan sangat cocok digunakan untuk roda robot yang membutuhkan kecepatan gerak yang tinggi. Pada penelitian ini motor DC digunakan sebagai penggerak utama robot line follower.
2.4.2 Motor Servo Standar
Motor servo adalah motor DC yang dilengkapi dengan sistem kontrol. Sistem kontrol ini akan memberikan umpan balik posisi perputaran motor dari 0 sampai 180 derajat. Disamping itu motor ini juga memiliki torsi relatif cukup kuat. Gambar 2.7 menunjukkan penampang dan pengkabelan dari motor servo. Sistem pengkabelan motor servo terdiri atas 3 bagian, yaitu Vcc, Gnd, dan Kontrol (PWM= Pulse Width Modulation). Pemberian PWM pada motor servo akan membuat servo bergerak pada posisi tertentu dan kemudian berhenti (kontrol posisi)[18].
Gambar 2.7 Motor servo dan konfigurasi pin[18]
Prinsip utama dari pengendalian motor servo adalah pemberian nilai PWM pada kontrolnya. Frekuensi PWM yang digunakan pada pengontrol motor servo selalu 50 Hz sehingga pulsa dihasilkan setiap 20 ms. Lebar pulsa akan menentukan posisi servo yang dikehendaki. Pemberian lebar pulsa 1,5 ms akan membuat motor servo berputar ke posisi netral (90 derajat), lebar pulsa 1,75 ms akan membuat motor servo berputar l;;\mendekati posisi 180 derajat, dan dengan lebar pulsa 1,25 ms motor servo akan bergerak ke posisi 0 derajat. Gambar 2.8 berikut memperlihatkan hubungan antara lebar pulsa PWM dengan arah putaran motor servo.
Gambar 2.8 Hubungan Lebar Pulsa PWM dengan Arah Putaran Motor Servo[18]
2.4.3 Dr iver Motor DC L298
mengendalikan 2 motor DC menggunakan H-Bridge driver motor DC L298 pada mode paralel[18].
Prinsip kerja IC L298, IC ini memiliki empat channel masukan yang didesain untuk dapat menerima masukan level logika TTL. Masing-masing channel masukan ini memiliki channel keluaran yang bersesuaian. Gambar 2.7 memperlihatkan penampang IC L298. Dengan memberi tegangan 5 volt pada pin enable A dan enable B, masing-masing channel output akan menghasilkan logika high (1) atau low (0) sesuai dengan input pada channel masukan. Untuk lebih jelasnya prinsip kerja IC L298 dapat dilihat pada tabel 2.9.
Gambar 2.9 Penampang IC L298[18]
Tabel 2.3 Logika Prinsip Kerja IC L298
Enable A,B Input 1,3 Output 1,3 Input 2,4 Output 2,4
1
0 0 0 0
1 1 1 1
0
0 X 0 X
2.5 Keypad Matr iks 4x4
Keypad merupakan salah satu peripheral yang sangat penting dalam sistem komputer. Keypad matriks 4x4 pada dasarnya merupakan konfigurasi saklar/tombol yang disusun berdasarkan baris dan kolom (4 baris dan 4 kolom).
Pada Gambar 2.10 ditunjukkan ilustrasi susunan / konfigurasi keypad 4x4 yang lazim. Keypad 4x4 biasa juga disebut keypad heksadesimal karena terdapat 16 tombol yang dapat mewakili semua karakter heksadesimal dari 0-9 dan A-F. Untuk keperluan yang lain karakter tersebut boleh digannti sesuai dengan penggunaannya.
Gambar 2.10 Konfigurasi Keypad Matr iks 4x4
(sumber : http://electrocontrol.files.wordpress.com/2011/04/dasar-keypad.jpg)
2.6 LCD (Liquid Crystal Display) Karakter 16x2
LCD (liquid crystal display) adalah piranti output untuk sistem komputer atau mikrokontroler yang dapat menampilkan karakter standar yang telah tersimpan dalam ROM pada LCD tersebut. Karakter yang dapat ditampilkan sebanyak 32 karakter yang tersusun dalam 16 kolom dan dua baris, sehingga sering disebut LCD 16x2. LCD memiliki 16 pin dan memerlukan tegangan 5V DC. Gambar 2.11 menunjukkan bentuk dan susunan pin LCD dan keterangan dari setiap pin diberikan pada tabel 2.4.
Sebelum menggunakan modul LCD ini, power supply 5V DC harus diberikan sebagai sumber arusnya seperti yang ditunjukkan gambar 2.12.
Gambar 2.12 Hubungan Power Supply ke LCD[15] Tabel 2.4 Keterangan Pin LCD Karakter 16x2
No pin Nama pin Level Fungsi
1 Vss - Ground
2 Vdd - Power supply untuk chip
3 Vo 0V – 5V Power supplyuntuk LCD
4 RS H/L Register Selection
5 R/W H/L Read atau Write
6 E H→L Enable
7 DB0 H/L Data Bit 0
8 DB1 H/L Data Bit 1
9 DB2 H/L Data Bit 2
10 DB3 H/L Data Bit 3
11 DB4 H/L Data Bit 4
12 DB5 H/L Data Bit 5
13 DB6 H/L Data Bit 6
14 DB7 H/L Data Bit 7
15 LEDA - Power supply untuk LED (+)
16 LEDK - Power supply untuk LED (-)
1. Mengatur display LCD, cursor dan blink.
Tabel 2.5 Pengaturan Display LCD
E RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
1→0 0 0 0 0 0 0 1 D C B
Keterangan:
D: D=0 display mati dan D=1 display hidup C: C=0 cursor mati dan C=1 cursor hidup B: B=0 blink mati dan B=1 blink hidup 2. Mengatur karakter yang akan ditampilkan
Tabel 2.6 Pengaturan Display LCD
E RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
1→0 0 0 Nilai berdasarkan CGROM
2.7 Sensor
Pada penelitian ini, robot line follower menggunakan sensor proximity yang dapat mendeteksi ada atau tidak adanya suatu garis, dimana garis ini merupakan pembimbing gerak robot. Sensor ini dapat dibuat dari pasangan IRED (InfraRed Emitting Diode) dan Photodiode . IRED merupakan LED (Light Emitting Diode) yang memancarkan inframerah, sedangkan photodiode merupakan sebuah dioda semikunduktor yang berfungsi sebagai sensor cahaya (sensor penerima cahaya).
2.8Cara Kerja Sensor Garis (Line Follower)
Robot mengguanakn IR sensor (dalam hal ini menggunakan LED dan photodiode sebagai pengganti IR sensor) untuk mendeteksi jalur yang dibuat, yaitu dengan cara : pososi robot diletakkan pada jalur, usahakan posisi jalur hitam berada ditengah - tengah IR sensor kiri dan IR sensor kanan[8].
Gambar 2.14 Cara Kerja Sensor Garis[8]
BAB III
ANALISIS DAN PERANCANGAN SISTEM
Line follower termasuk ke dalam jenis robot daratan (ground robot), secara umum robot ini bergerak menggunakan roda. Sesuai dengan namanya, robot ini merupakan robot pengikut garis yang hanya akan bergerak mengikuti garis yang telah ditentukan. Oleh karena itu penulis akan menggunakan algoritma fuzzy untuk menentukan tujuan dari home base menuju ke meja pelanggan sehingga robot akan bergerak sesuai dengan hasil yang dihasilkan oleh algoritma tersebut dan robot tetap bergerak didalam jalur yang telah disediakan.
3.1 Analisis Sistem
Analisis sistem dapat didefinisikan sebagai penguraian dari suatu sistem yang utuh kedalam bagian-bagian komponennnya dengan maksud untuk mengidentifikasi dan mengevaluasi permasalahan-permasalahan yang terjadi dan kebutuhan - kebutuhan yang diharapkan sehingga dapat diusulkan perbaikan-perbaikannya.
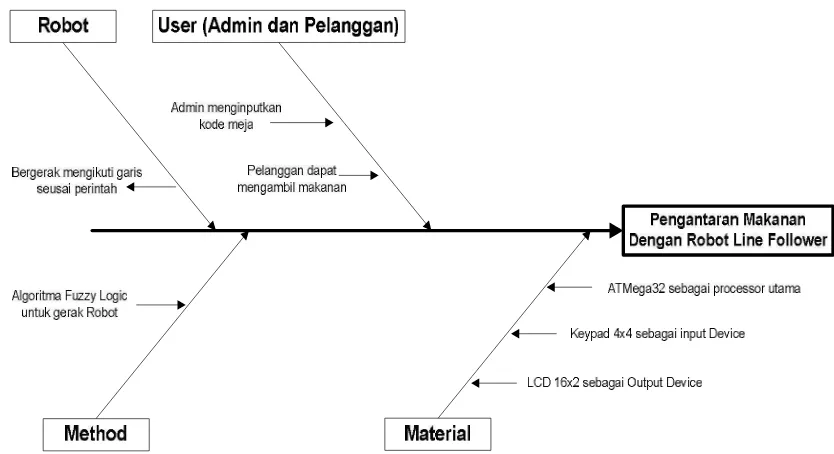
3.1.1 Analisis Masalah
Untuk mengidentifikasi masalah digunakan diagram Ishikawa. Diagram Ishikawa adalah sebuah alat grafis yang digunakan untuk mengidentifikasi, mengeksplorasi dan menggambarkan masalah serta sebab dan akibat dari masalah tersebut. Ini sering disebut juga diagram sebab – akibat atau diagram tulang ikan (fishbone diagram).
Masalah utama adalah tidak bisanya robot line follower biasa dapat melakukan mengantarkan makanan ke meja pelanggan. Secara umum robot line follower akan bergerak secara acak mengikuti garis hitam, sehingga robot sulit untuk mengantarkan makanan ke suatu tempat.
bermasalah dengan pengantaran makanan (food delivery). Oleh karena itu robot line follower pengantar makanan ini sekiranya dapat membantu kinerja manusia dalam melakukan pengantaran makanan ke meja pelanggan. Robot line follower ini dibangun dengan menggunakan bahasa C CodeVision AVR.
Analisis masalah digambarkan dengan Diagram Ishikawa (fishbone Diagram) berikut ini. Bagian kepala atau segiempat yang berada di sebelah kanan merupakan masalah. Sementara di bagian tulang-tulangnya merupakan penyebab.
Gambar 3.1 Ishikawa Diagr am Pada Robot Line Follower
3.1.2Analisis Kebutuhan (Requirement Analyst)
Analisis kebutuhan sistem dibagi menjadi dua, yaitu analisis kebutuhan non fungsional dan analisis kebutuhan fungsional. Pada tahapan analisis ini sangat dibutuhkan dalam mendukung kinerja sistem, apakah sistem yang dibuat telah sesuai dengan kebutuhan atau belum, karena kebutuhan sistem akan mendukung tercapainya tujuan yang diharapkan.
3.1.2.1Analisis Fungsional
a. Robot dapat menerima perintah yang diinputkan oleh user.
b. Robot dapat melakukan mengantarkan makanan ke meja pelanggan berdasarkan hasil Algoritma Fuzzy.
c. Robot dapat bergerak sesuai dengan hasil inputan meja berdasarkan Algoritma Fuzzy.
3.1.2.2Analisis Nonfungsional
Untuk mendukung kinerja sistem, sistem juga dapat berfungsi sebagai berikut : 1. Robot dapat dioperasikan dengan mudah.
2. Robot dapat menerima inputan kode meja. 3. Robot dapat menampilkan hasil pencarian meja.
3.1.2.3Pemodelan Per syaratan Sistem dengan Use Case
Unified Modelling Language(UML) merupakan bentuk perancangan dan dokumentasi perangkat lunak berbasis pemrograman berorientasi objek. Pada penelitian ini, bentuk perancangan UML menggunakan beberapa diagram, yaitu Usecase Diagram, Activity Diagram, dan Sequence Diagram. Use case adalah salah satu pemodelan yang digunakan untuk memodelkan persyaratan sistem. Dengan use case ini digambarkan siapa saja yang berinteraksi dengan sistem dan apa saja yang dapat dilakukan dengan sistem.
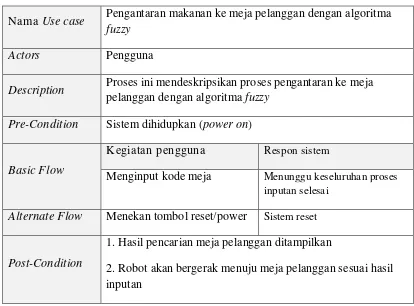
Gambar 3.2 Usecase Diagram Prototipe Robot Line follower Pengantar Makanan Tabel 3.1 Dokumentasi Naratif Use Case sistem
Nama Use case Pengantaran makanan ke meja pelanggan dengan algoritma fuzzy
Actors Pengguna
Description Proses ini mendeskripsikan proses pengantaran ke meja pelanggan dengan algoritma fuzzy
Pre-Condition Sistem dihidupkan (power on)
Basic Flow
Kegiatan pengguna Respon sistem
Menginput kode meja Menunggu keseluruhan proses inputan selesai
Alternate Flow Menekan tombol reset/power Sistem reset
Post-Condition
1. Hasil pencarian meja pelanggan ditampilkan
2. Robot akan bergerak menuju meja pelanggan sesuai hasil inputan
3.1.2.4Activity Diagram
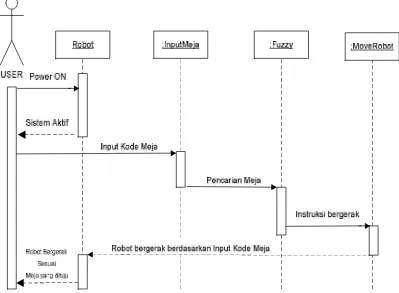
3.1.2.5 Sequence Diagram
Sequence diagram merupakan interaksi antara aktor-aktor yang terdapat dalam suatu
sistem, dan terjadi komunikasi yang berupa pesan. Pada gambar 3.4 berikut dijelaskan
sequence diagram robot line follower pengantar makanan.
Gambar 3.4 Sequence Diagram Prototipe Robot Line follower Pengantar Makanan
3.2 Perancangan Sistem
Pada tahap perancangan sistem akan dibagi menjadi beberapa bagian utama, yaitu penentuan komponen yang digunakan, perancangan kontruksi robot line follower dan perancangan perangkat lunak robot serta algoritma fuzzy.
3.2.1Komponen yang Digunakan Robot
Komponen yang digunakan dikelompok menjadi dua yaitu komponen fisik dan komponen
elektronik. Komponen fisik digunakan untuk membentuk kerangka robot, bagian body
utama, mekanis robot. Sedangkan komponen elektronik digunakan untuk membangun
sirkuit utama (main circuit ), bagian aktuator, dan perangkat sensor. Berikut adalah tabel
rincian dari peralatan dan komponen yang digunakan (Tabel 3.2, Tabel 3.3 dan Tabel 3.4).
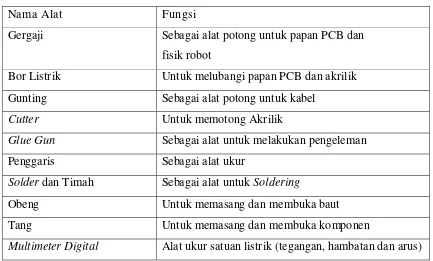
Tabel 3.2 Tabel Peralatan yang digunakan
Nama Alat Fungsi
Gergaji Sebagai alat potong untuk papan PCB dan fisik robot
Bor Listrik Untuk melubangi papan PCB dan akrilik
Gunting Sebagai alat potong untuk kabel
Cutter Untuk memotong Akrilik
Glue Gun Sebagai alat untuk melakukan pengeleman
Penggaris Sebagai alat ukur
Solder dan Timah Sebagai alat untuk Soldering
Obeng Untuk memasang dan membuka baut
Tang Untuk memasang dan membuka komponen
Multimeter Digital Alat ukur satuan listrik (tegangan, hambatan dan arus)
Tabel 3.3 Tabel Rincian Komponen Fisik
Nama Spesifikasi Keterangan
Akrilik Tebal 3 mm Sebagai badan robot dan
Papan PCB (Printed Circuit Board)
Tebal 3 mm Sebagai tempat untuk
memasang rangkaian
Spacer Panjang 20 mm Tiang untuk akrilik
Tabel 3.4 Tabel Rincian Komponen Elektronik
Nama Spesifikasi Keterangan
Minimum Sistem Mikrokontroler
ATMega32 Processor Utama
Driver Motor L298D Driver untuk motor DC
Motor Servo 1,5 Kg/cm Aktuator lengan robot
Toggle Switch 3 pin Saklar Servo driver
Motor DC 6 Volt Akuator Roda
LCD Karakter 16x2 Media output
Pushbutton 3 pin Media input
Komponen Pasif Kapasitor, Resistor, Kristal, Potensiometer
Komponen Sirkuit
Switch 6 pin Sebagai On/Off Robot
Push Button 2 pin Sebagai Reset
Sensor Proximity Infra Red, dioda foto dan IC LM324
Komponen untuk sensor robot
Pin Konektor Male Konektor
Housing Female Konektor
Kabel UTP 1 Meter Transmisi komponen
Kabel Pelangi Isi 20, 2 Meter Transmisi konektor
Baterai 1,2 V, 2.000 MAh (8 buah) Sumber tegangan
3.2.2 Perancangan Konstruksi Robot Line Follower
Prototipe robot line follower pengantar makanan yang akan dirancang ini untuk membantu dan meringankan pekerjaan manusia. Robot line follower pengantar makanan ini merupakan robot yang diciptakan untuk menggantikan peran seorang pelayan dirumah makan. Ada beberapa hal yang menjadi fokus dalam tahap perancangan robot yaitu kerangka robot, aktuator, sensor proximity, sirkuit elektronik dan perangkat lunak.
3.2.3 Perancangan Kerangaka Robot
Kerangka adalah konstruksi robot yang akan menentukan desain, bentuk dan ukuran dari komponen fisik lainnya. Fungsi utama dari kerangka adalah sebagai tempat atau kedudukan untuk seluruh komponen robot. Disamping itu kerangka juga akan menentukan efisiensi kerja dari robot.
Untuk material kerangka robot dapat digunakan beberapa alternatif bahan seperti
bahan dari logam, plastik, dan kayu[16]. Pemilihan material akan sangat berpengaruh
terhadap konstruksi robot seperti berat, kekuatan, ketahanan terhadap keretakan dan
kemampuan meredam getaran. Perpaduan material yang baik dapat menghasilkan
konstruksi yang kuat dan ringan.
Membicarakan soal robot, tidak lepas dari unsur mekanik sebagai kerangka robot. Kerangka robot line follower ini terbuat dari bahan plastik yaitu acrylic. Alasan penggunaan acrylic adalah, karena bahan ini ringan, kuat, tidak mudah rusak dan mudah
Gambar 3.5 Desain Rancangan Kerangka Robot
Dimana terdapat plat acrylic sebagai tempat sensor proximity, baterai, driver motor, Servo, gearbox, motor DC, Mikrokontroller ATMega32 dan tempat untuk meletakkan makanan. Robot terdiri dari 2 buah roda yang terhubung secara mekanik menggunakan single gearbox dengan motor DC, dan 1 buah roda bebas.
3.2.4 Perancangan Sensor Proximity
Robot Line Follower pengantar makanan ini menggunakan sensor Proximity sebagai lintasan yang akan di lalui robot sampai pada tujuan. Sensor proximity ini memiliki sensitivitas yang tinggi serta output yang dihasilkan berupa pulsa digital dengan logika high sebesar 5 volt. Sensor ini terdiri dari 6 pasang IRED (InfraRed Emitting Diode) dan photodioda ditempatkan secara menggantung pada bagian bawah depan kerangka robot, sehingga dapat berhadapan langsung dengan lintasan yang akan dibaca. Bila sensor mendeteksi warna hitam maka keluaran dari rangkaian sensor akan berlogika “1” (high) dan sebalinya jika sensor mendeteksi warna putih maka keluaran dari rangkaian sensor akan berlogika “0” (low). Berikut adalah rancangan sensor proximity dapat dilihat pada gambar 3.6.
Gambar 3.6 Rancangan sensor proximity 7 mm
Infra Red
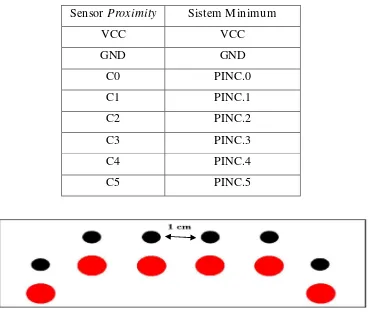
Pada robot line follower ini sensor proximity yang digunakan terdiri dari 6 buah pasang IRED (InfraRed Emitting Diode) dan Photodioda, dengan letak tiga buah disebelah kiri dan tiga buah di sebelah kanan depan bawah kerangka robot, sehingga dapat berhadapan langsung dengan lintasan yang akan dibaca. Berikut rancangan sensor proximity pada robot line follower dapat dilihat pada gambar 3.7.
Tabel 3.5 Hubungan Sensor Proximity Dengan Sistem Minimum
Sensor Proximity Sistem Minimum
VCC VCC
GND GND
C0 PINC.0
C1 PINC.1
C2 PINC.2
C3 PINC.3
C4 PINC.4
C5 PINC.5
Gambar 3.7 Rancangan Sensor Proximity Robot Line Follower
maksimum dan ketika sensor mendeteksi garis hitam, maka tegangan output dari LDR (light defendant resistor) akan bernilai mendekati 0 volt.
3.2.5 Perancangan Lintasan Robot Line Follower
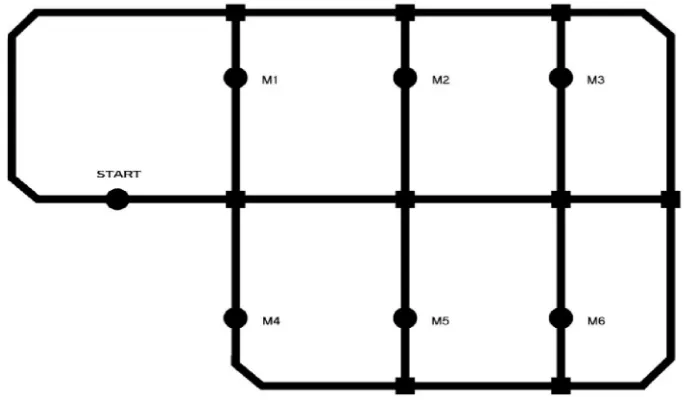
Pada perancangan system, data lintasan yang digunakan adalah lintasan skema di sebuah rumah makan. Kemudian setiap jalan utama dari lintasan yang diperoleh diberi warna hitam sebagai rancangan lintasan robot line follower. Berikut adalah rancangan lintasan disebuah rumah makan untuk robot line follower (Gambar 3.8).
Gambar 3.8 Lintasan r obot pengantar makanan Berikut table keterangan gambar 3.8 (Tabel 3.6).
Tabel 3.6 Keterangan gambar 3.9
Kode Ketarangan
M1 M2 M3 M4 M5 M6
3.2.6 Perancangan Aktuator Robot
Aktuator adalah komponen yang berfungsi untuk melakukan gerakan mekanis berdasarkan input perintah dari mikrokontroler (processor). Robot line follower ini memiliki 2 komponen mekanis yaitu roda (wheel) dan servo standar.
Roda adalah aktuator yang akan digunakan oleh robot line follower untuk melakukan pergerakan didarat. untuk penggerak roda digunakan motor DC dan gearbox untuk meningkatkan torsi motor. Motor DC yang digunakan akan dikontrol oleh mikrokontroler ATMega32 melalui IC driver L298. Arah perputaran motor akan ditentukan berdasarkan output dari IC L298. Rancangan aktuator robot line follower dapat dilihat pada gambar 3.9 berikut.
Gambar 3.9 Rancangan Aktuator Robot Line Follower[1]
Detail rancangan aktuator diatas dapat dilihat dari gambar 3.11 berikut.
Gambar 3.10 Detail rancangan aktuator r obot Line Follower[1] M ot or dan gear box
Baut penghubung Roda
3.2.7 Perancangan Aktuator Servo
Robot line follower ini dilengkapi dengan servo yang digunakan sebagai lengan untuk
meletakkan makanan yang akan di antar ke meja pelanggan, servo ini di letakkan di badan
robot dapat dilihat gambar 3.11 berikut.
Gambar 3.11 Rancangan Aktuator Servo
3.2.8 Perancangan Sir kuit Elektronik
Perancangan sirkuit elektronik berhubungan dengan perancangan rangkaian power supply, mikrokontroler ATMegaa32, Pushbutton, LCD karakter 16x2, rangkaian sensor proximity, driver motor DC, dan driver motor servo. Semua rangkaian tersebut disatukan pada sebuah pada papan sirkuit utama (main circuit). Disamping itu, khusus untuk rangkaian driver servo aktuator manipulator dibuat terpisah dari sirkuit utama.
3.2.8.1Perancangan Rangkaian Sumber Tegangan
Agar sistem dapat bekerja dengan baik dibutuhkan sumber tegangan (power supply). Ada dua jenis sumber tegangan yang dibutuhkan pada system ini yaitu sumber tegangan untuk sirkuit dan sumber tegangan untuk aktuator. Sirkuit utama mebutuhkan tegangan agar dapat beroperasi dengan stabil yaitu 5V. Sedangkan aktuator membutuhkan tegangan 9V – 12V.
baterai (tunggal atau gabungan beberapa baterai) yang menghasilkan tegangan keluaran 9V – 12V. Untuk memperoleh tegangan 5V dari sumber tegangan 6V – 12V dapat digunakan IC regulator 7805, IC regulator ini berfungsi untuk menghasilkan tegangan keluaran sebesar 5V. Berikut adalah gambar rangkaian sumber tegangan untuk sirkuit utama (Gambar 3.12).
Gambar 3.12 Perancangan Rangkaian regulator IC 7805
3.2.8.2Perancangan Mikrokontr oller ATMega32
Mikrokontroler digunakan sebagai pengendali utama robot line follower. Mikrokontroler
akan memproses input dari perangkat kontrol dan mengontrol semua aktivitas robot
seperti pergerakan, sensing, dan komunikasi dengan perangkat kontrol. Rangkaian dasar
yang digunakan untuk mengoperasikan sebuah mikrokontroler disebut sebagai rangkaian
sistem minimum. Rangkaian sistem minimum terdiri dari rangakaian osilator, rangkaian
sistem reset, dan sumber tegangan.
Rangkaian osilator (clock) berfungsi memberikan sinyal clock untuk
mikrokontroler dengan frekuensi tertentu agar mikrokontroler yang digunakan pada
sistem dapat bekerja dengan baik. Rangkaian clock ini menghasilkan sinyal high atau low
dengan periode yang sama dan konstan. Pada gambar 3.13 ditunjukkan bentuk sinyal
clock dalam satuan waktu mikro detik.
Rangkaian clock (osilator) pada sistem menggunakan satu buah kristal dengan frekuensi
12 MHZ dan dua buah kapasitor keramik dengan kapasitas 22 pF. Keluaran dari osilator
ini dihubungkan ke mikrokontroler pin 12 (XTAL2) dan pin 13 (XTAL1).
Sistem reset pada mikrokontroler berada pada pin 9. Sistem Mikrokontroler akan melakukan reset apabila pin 9 menerima satu siklus sinyal (1 dan 0). Jika sistem reset berjalan dengan baik, maka mikrokontroler akan kembali menjalankan program dari awal. Pada gambar 3.14 berikut dapat dilihat sistem minimum mikrokontroler ATMega32.
Tabel 3.7 Rincian Komponen Mikrokontroller ATMega32
No Nama Barang Banyak Fungsi
1 Mikrokontroller
(ATmega32A) 1 Processor Utama
2 Crystall (12MHz) 1 Pembangkit Sinyal
3 Kapasitor nonpolar
(22pF) 2 Komponen Pendukung
4 Resistor 10k 1 Komponen Pendukung
5 Kapasitor10uF 1 Komponen Pendukung
6 Dioda1N4002 1 Komponen Pendukung
7 IC 7805 1 Pembagi tegangan sebesar 5 V
8 Kapasitor nonpolar
(100 uF) 1 Komponen Pendukung
9 LED 1 Sebagai indicator
Gambar 3.14 Perancangan Mikrokontr oler ATMega32
3.2.8.3Perancangan Push Button
Pushbutton digunakan pada robot pengantar makanan sebagai input untuk menentukan meja yang dituju. Penulis menggunakan 4 buah PushButton untuk setiap meja. Berdasarkan table 3.8 dapat dilihat bahwa di System minimum dikoneksikan langsung ke 4 pushbutton melalui pin pada PINB.0, PINB.1, PINB.2, PINB.3 dan Pin PINB.4. Dimana PINA.0 sebagai input untuk button up, sedangkan PIN.1 sebagai input untuk button down dan PIN.3 untuk button OK. Pushbutton ini merupakan input device pada system yang digunakan untuk memasukkan inputan kode meja pada sistem. Pushbutton ini terdiri dari 4 button yang tersusun dalam 1 baris. Berikut adalah rangkaian pushbutton (Gambar 3.15).
Tabel 3.8 Hubungan Pushbutton dengan System Minimum Pushbutton System Minimum
Vcc Vcc
Gnd Gnd
B1 PINB.0
B2 PINB.1
B3 PINB.2
Gambar 3.15 Perancangan Pushbutton
3.2.8.4Perancangan LCD Karakter 16x2
LCD karakter 16x2 merupakan output device yang digunakan pada robot line follower. LCD karakter 16x2 ini memiliki 16 buah pin dimana delapan pin sebagai bus data, tiga pin sebagai bus kontrol, dan lima pin lainnya sebagai jalur power supply dan
pengaturan kontras LCD. Pada penggunaannya LCD dapat dikontrol dengan
menggunakan 8 pin bus data atau 4 pin bus data, tapi pada penelitian ini sistem hanya
akan menggunakan 4 pin bus data (pin D4, D5, D6 dan D7). Berikut adalah rangkaian
minimum LCD karakter 16x2 (Gambar 3.16).
Gambar 3.16 Rangkaian Minimum LCD Karakter 16x2
3.2.8.5Perancangan Rangkaian Sensor Proximity
Berikut adalah rangkaian sensor proximity yang akan digunakan pada robot line follower pengantar makanan (Gambar 3.17).
Gambar 3.17 Perancangan Rangkaian Sensor Proximity
3.2.8.6Perancangan Rangkaian Driver Motor DC
Untuk mengendalikan perputaran motor DC digunakan IC L298. IC ini akan menerima input dari mikrokontrolerATMega32 dan menghasilkan output yang bersesuaian. L298 mampu men-drive dua motor DC sekaligus. Untuk mengaktifkan IC L298 membutuhkan dua sumber tegangan yaitu sumber tegangan 5 V untuk enable chip dan input-an (logic power supply) serta sumber tegangan yang kedua adalah sumber tegangan untuk motor DC sebesar 9V - 12V. Berikut ini adalah gambar rangkaian IC L298 (Gambar 3.18).
Tabel 3.9 Rincian Komponen Dr iver Motor IC L298D
No Nama Komponen Banyak Fungsi
1 IC L298D 1 Driver Motor DC
2 IC 7805 1 Pembagi tegangan sebesar 5 V
3 Dioda IN4002 9 Komponen Pendukung
4 Resistor 330 Ohm 1 Komponen Pendukung
6 LED 1 Indikator
7 TBlock 3 Terminal rangkaian
8 Resistor 4,7 Ohm 2 Komponen Pendukung
9 Pin jantan hitam 10 Konektor ke MCU
Gambar 3.18 Perancangan Rangkaian Driver Motor DC IC L298
3.2.9 Perancangan Pr ogram Mikrokontroller
3.2.9.1Perancangan Pr ogram Robot Line Follower
3.2.9.2Perancangan Pr ogram Push Button Berikut adalah flowchatpushbutton:
Gambar 3.20 Flowchart Pushbutton Up
3.2.9.3Perancangan Algoritma Fuzzy Berikut adalah flowchart algoritma fuzzy:
IMPLEMENTASI DAN PENGUJ IAN SISTEM
4.1 Implementasi Sistem
Prototipe robot line follower pengantar makanan berbasis mikrokontroller ATMega32 yang mengunakan algoritma fuzzy ini dibangun dengan menggunakan bahasa C CodeVision AVR. File program *.c dikompilasi menjadi file *.hex. Hasil kompilasi tersebut kemudian di-download ke dalam mikrokontroler.
4.1.1Implementasi Kerangka Robot Line Follower
Kerangka robot line follower diimplementasikan menggunakan bahan plastik yaitu akrilik dengan ketebalan 3 mm. Alasan menggunakan bahan akrilik yaitu karena bahan ini ringan, kuat, tidak mudah rusak dan mudah dalam pengerjaannya. Bahan yang digunakan untuk membuat kerangka robot adalah akrilik 3 mm, spacer berukuran 35 mm, lem, gergaji, kertas pasir dan bor listrik dengan mata 3 mm.
(a) (b) (c)
Gambar 4.1 Implementasi Kerangka Robot Line Follower (a) Kerangka Bagian Depan (b) Kerangka Bagian Belakang (c) Kerangka Bagian Samping
4.1.2Implementasi Aktuator Robot
Robot line follower hanya memiliki satu buah aktuator yang digunakan untuk penggerak robot. Aktuator ini diimplementasikan menggunakan motor gear box dan wheel. Motor yang digunakan dapat bekerja antara 3 – 12 volt. Untuk wheel memiliki diameter 8 cm dan depth 3.25 mm, dapat dilihat pada gambar 4.2.
(a) (b)
Gambar 4.2 Implementasi aktuator (a) Aktuator Motor (b) Roda (wheel)
4.1.3Implementasi Catu Daya
5 volt ke pushbutton. Keluaran 5 Volt dibutuhkan oleh mikrokontroler, agar bisa sekaligus mensuplai sensor Proximity, pushbutton, dan driver motor.
Gambar 4.3 Implementasi Catu Daya
4.1.4Implementasi Sensor Proximity
Sensor proximity diimplementasikan menggunakan infrared sebagai pemancar sinyal dan photodiode sebagai penerima sinyal. Terdiri dari enam pasang buah infrared dan photodiode. Enam pasang sensor ini diletakkan pada papan PCB yang di letakkan di depan bawah robot, dengan susunan sensor 3 buah sensor berada dikanan dan tiga buah sensor berada dikiri. Pada gambar 4.4 dapat dilihat implementasi sensor proximity.
Gambar 4.4 Implementasi sensor proximity
4.1.5Implementasi Rangkaian Sir kuit Elektronik
mudah karena komponen hanya dipasang pada lubang-lubang yang disediakan tanpa penguat (solder). Berikut adalah gambar contoh penggunaan PCB dan protoboard (Gambar 4.5).
(a) (b)
Gambar 4.5 Implemenasi rangkaian sir kuit elektronik (a) pada PCB (b) pada protoboard
Langkah-langkah implementasi rangkaian sirkuit elektroik pada papan PCB dijelaskan sebagai berikut:
Gambar 4.6 Schematic rangkaian menggunakan ISIS Proteus 7.7 Pro Setelah membuat schematic rangkaian, tahap selanjut adalah membuat layout PCB dengan menggunakan ARES. Berikut gambar layout PCB (gambar 4.7).
dilakukan tahap printing. Pada tahap ini, pertama-tama akan dilakukan pemindaian layout, yang bertujuan untuk menentukan komponen yang akan dicetak. Setelah pemindaian selesai dilakukan, yang dilakukan adalah dengan men-export layout tersebut kedalam grafik (dapat dilihat pada gambar 4.8).
Gambar 4.8 layout di export kedalam gr afik
Setelah di-export kedalam bentuk grafik, tahap selanjutnya grafik layout tersebut dicetak mengunakan printer dengan tinta laser (gambar 4.9).
Gambar 4.9 Hasil printing layout pada ker tas glossy
3. Tahap penyablonan, pada tahapan ini, grafik layout PCB yang sudah diprint sebelumnya, akan disablon ke papan PCB. Caranya adalah, pertama-tama menempelkan kertas layout pada papan PCB, kemudian dipanaskan dengan mesin press atau dapat juga dilakukan dengan setrika listrik hingga layout tersebut menempel pada papan PCB (gambar 4.10).
(a) (b)
dilarutkan dengan memasukkan larutan ferri cloride (FeCl3). Caranya adalah
larutan FeCl3 dicampur dengan air hangat, kemudian papan PCB yang disablon
dimasukkan kedalam larutan tersebut sampai tembaga pada papan PCB terlarut
dan tinggal menyisakan layout yang telah kita buat sebelumnya. Berikut gambar
4.11 (a) papan PCB dan larutan FeCl3 (b) hasil pelarutan pada papan PCB.
(a) (b)
Gambar 4.11 Proses pelarutan (a) PCB dan Larutan FeCl3 (b)Hasil Pelarutan
Papan PCB
5. Pengeboran, pada tahap ini PCB yang telah dilarutkan akan dilubangi menggunakan bor dengan mata bor 0.8 mm – 1 mm. Tempat yang akan dilubangi telah tersedia pada layout PCB tersebut. Tujuan dari melubangi PCB untuk menyediakan tempat penyolderan antara komponen dengan papan PCB. Dapat dilihat pada gambar 4.12.
![Gambar 2.4 : Memory ATMega32[15] (a) Flash Program Memory, (b) Data](https://thumb-ap.123doks.com/thumbv2/123dok/352345.32619/30.595.109.498.419.724/gambar-memory-atmega-a-flash-program-memory-data.webp)
![Gambar 2.12 Hubungan Power Supply ke LCD[15]](https://thumb-ap.123doks.com/thumbv2/123dok/352345.32619/37.595.232.431.137.288/gambar-hubungan-power-supply-ke-lcd.webp)
![Gambar 2.13 Kode Karakter CGROM pada LCD[15]](https://thumb-ap.123doks.com/thumbv2/123dok/352345.32619/39.595.111.522.74.735/gambar-kode-karakter-cgrom-pada-lcd.webp)
![Gambar 3.10 Detail rancangan aktuator robot Line Follower[1]](https://thumb-ap.123doks.com/thumbv2/123dok/352345.32619/53.595.282.398.297.435/gambar-detail-rancangan-aktuator-robot-line-follower.webp)
