iii
ABSTRAK
Robot pengikut garis adalah robot yang bergerak otonom yang bertujuan untuk mengikuti suatu garis yang telah di tentukan. Salah satu teknik yang di gunakan untuk menggerak robot agar dapat mengikuti garis yaitu dengan steering depan dan diferential steering hanya teknik ini masih memiliki kendala, pada saat belokan yang mencapai 900 dapat menghabiskan cukup banyak waktu untuk menyesuaikan posisi robot dan jalur.
Dengan menggunakan robot line follower menggunakan roda omniwheel maka di harapkan Penggunaan roda omniwheel pada robot line follower diharapkan robot line follower dapat berjalan secara mulus pada saat melewati tikungan yang susah sekalipun, pada bagian bawah robot line follower di lengkapi dengan sensor garis, yang berfungsi untuk mendeteksi garis. Sebagai penggerak roda omniwheel menggunakan motor DC yang dilengkapi dengan driver motor. Dan sebagai pengontrolan menggunakan mikrokontroler basicstamp BS2P40 dan juga sebagai pengaturan sensor digunakan komparator LM393.
Pergerakan robot line follower ini sudah sesuai keinginan tetapi masih mengalami kendala diantaranya yaitu : jarak antara sensor lebih lebar dibandingkan dengan jarak garis sehingga jika robot berhenti diantara garis maka robot dianggap keluar garis maka robot tidak dapat melakukan perintah berikutnya dikarenakan sensor garis sudah tidak mendeteksi garis.
iv
ABSTRACT
Line follower robot is autonomous robots that moved and aims to follow an aranged line. One of the technique that is used to move the robot in order to follow the line is by using front steering and differential steering,however this technique still has obstacles, when the curves reach 90°,it can spend plenty of time to adjust the position of the robot and the robots path.
The using of omniwheel to the robot, its expected that line follower robots can run smothly when passing even the dificult bend, at the bottom of the line follower robot is equipped with sensors line, which serves to detect the line. As the drive wheels omniwheel in use DC motor equipped with a driver motors. And as a control using a microcontroller basicstamp BS2P40 as well as sensor settings used LM393 comparator.
Line follower robot movement is already fit but are still experiencing problems such as : the distance between the sensors is wider than the line spacing so that if the robot stops between the lines, then the robot is considered as it out of line then the robot can not perform the next command line, because the sensor is not detecting the line .
1
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Di era globalisasi ini telah mengenal berbagai macam jenis robot,di antaranya adalah robot penggikut garis atau line follower robot. Robot pengikut garis adalah robot yang bergerak otonom yang bertujuan untuk mengikuti suatu garis yang telah di tentukan. Salah satu teknik yang di gunakan untuk menggerak robot agar dapat mengikuti garis yaitu dengan steering depan dan diferential steering hanya teknik ini masih memiliki kendala, pada saat belokan yang mencapai 900 dapat menghabiskan cukup banyak waktu untuk menyesuaikan posisi robot dan jalur
Dari kendala yang di hadapi di atas maka pada penelitian ini akan di rancang suatu robot line follower dengan menggunakan roda khusus yaitu roda omniwheel, dengan robot ini maka di harapkan robot line follower dapat berjalan secara mulus pada saat melewati tikungan yang susah sekalipun, dan robot dapat mengikuti garis yang telah di buat sesuai keinginan dan tidak salah mengikuti garis yang telah di tentukan.
1.2. Perumusan Masalah
Masalah yang akan dibahas pada penelitian ini adalah :
1. Bagaimana memilih roda omniwheel yang cocok buat robot line follower ini.
2. Bagaimana merancang posisi sensor garis agar sesuai sebagai navigasi pergerakan robot.
3. Bagaimana memprogram Pulse Width Modulation (PWM).
1.3. Maksud dan Tujuan
2 mengikuti garis, dan robot dapat bergerak pada saat belokan mencapai 900 ataupun 450 tanpa perlu memutar badan robot.
1.4. Batasan Masalah
Untuk menghindari penyimpangan dari pokok permasalahan dan untuk mempermudah dalam pembahasaan tugas akhir ini, maka perlu adanya pembatasan masalah sehingga diharapkan pembahasan dapat dilakukan lebih mendalam dan terfokus. Adapun pembatasan masalah dalam pembahasan tugas akhir ini, sebagai berikut :
1. Robot line folower ini menggunakan empat buah roda omniwheel yang terletak pada ke empat sudut sisinya.
2. Mikrokontroler yang di gunakan yaitu BS2P40 karena lebih mudah dalam pemrograman.
3. Garis yang di ikuti oleh line follower yaitu mengikuti garis hitam yang memiliki lebar 3cm.
4. Jalurnya yang akan dilewati telah ditentukan sebelumnya. 5. Jarak tiap sensor sekitar 2 cm.
6. Menggunakan motor DC + gearbox.
7. Saat belokan, robot tidak perlu lagi untuk memutar posisi robot untuk berbelok.
1.5. Metodologi Penelitian
Metode penelitian yang di lakukan adalah eksperimental dengan tahapan sebagai berikut :
1. Studi literature dan studi lapangan
3 2. Interview
Merupakan metode pengumpulan data dengan cara mengajukan pertanyaan secara langsung kepada pihak – pihak yang mengetahui hal – hal yang dipelajari selama pengerjaan skripsi. Pertanyaan – pertanyaan ini diajukan kepada dosen pembimbing di kampus dan pihak lain yang mengetahui tentang robot line follower ini.
3. Perancangan
Yaitu mengaplikasikan teori yang didapat dari studi pustaka dan dari hasil bimbingan, sehingga tersusun suatu perancangan sistem untuk bagian perangkat keras juga untuk bagian perangkat lunak.
4. Analisis dan Pengujian
Metode untuk mengetahui hasil dari perancngan sistem yang telah dibuat, apakah sudah berhasil sesuai dengan yang direncanakan atau belum, selanjutnya akan dilakukan pengujian, baik secara teroritis ataupun praktis, dan jika terdapat kekurangan maka akan dilakukan beberapa perbaikan sistem sehingga akhirnya dapat diambil sebuah kesimpulan dari penelitian ini.
1.6 Sistematika Penulisan
Sistematika penulisan pada tugas akhir ini adalah :
BAB I PENDAHULUAN
Dalam bab ini dibahas latar belakang tugas akhir yang dilaksanakan, perumusan masalah, maksud dan tujuan, batasan masalah, metode penelitian dan sistematika penulisan.
BAB II LANDASAN TEORI
4 DC, Driver motor DC dengan IC L298, Phototansistor, LED ultra brigh, komparator, regulator tegangan, dan catu daya.
BAB III PERANCANGAN SISTEM
Dalam bab ini akan dibahas tentang perancangan perangkat keras, dan perangkat lunak untuk membuat Robot line follower tersebut.
BAB IV ANALISIS MASALAH
Dalam bab ini akan dibahas tentang bagaimana robot bergerak, analisa sensor, analisa Driver motor, analisa teknik pembacaan sensor,dan menganalisa pergerakan putaran roda pada saat melalui jalur – jalur tertentu.
BAB V KESIMPULAN DAN SARAN
5
BAB II
LANDASAN TEORI
2. Macam-macam Bentuk Robot
1. Mobile Robot
Robot Mobil atau Mobile Robot adalah konstruksi robot yang ciri khasnya adalah mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik yang lain.Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot.Hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang berat.Untuk dapat membuat sebuah robot mobile minimal diperlukan pengetahuan tentang mikrokontroler dan sensor-sensor elektronik.Base robot mobil dapat dengan mudah dibuat dengan menggunakan plywood / triplek, akrilik sampai menggunakan logam ( aluminium ). Robot mobil dapat dibuat sebagai pengikut garis ( Line Follower ) atau pengikut dinding ( Wall Follower ) ataupun pengikut cahaya. [10]
2. Mobile Jaringan
6 Teoritik dan Komputasi – GFTK LIPI.Seperti ditunjukkan di LWR, seluruh proses kontrol dan monitoring bisa dilakukan melalui perambah internet. Lebih jauh, seluruh sistem dan protokol yang dikembangkan untuk LWR ini telah dibuka sebagai open-source dengan lisensi GNU Public License (GPL) di SourceForge dengan nama openNR. [10]
3. Robot Manipulator ( robot tangan )
Robot ini hanyak memiliki satu tangan seperti tangan manusia yang fungsinya untuk memegang atau memindahkan barang, contoh robot ini adalah robot las di Industri mobil, robot merakit elektronik dll. [10]
4. Robot Humanoid
Robot yang memiliki kemampuan menyerupai manusia, baik fungsi maupun cara bertindak, contoh robot ini adalah Ashimo yang dikembangkan oleh Honda. Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan).Robot biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor.Biasanya kebanyakan robot industri digunakan dalam bidang produksi.Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, pekerjaan “cari dan tolong” (search and rescue), dan untuk pencarian tambang.Belakangan ini robot mulai memasuki pasaran konsumen di bidang hiburan, dan alat pembantu rumah tangga, seperti penyedot debu, dan pemotong rumput. [10]
5. Robot Berkaki
7 6. Flying Robot ( Robot Terbang )
Robot yang mampu terbang, robot ini menyerupai pesawat model yang deprogram khusus untuk memonitor keadaan di tanah dari atas, dan juga untuk meneruskankomunikasi. [10]
7. Under Water Robot (Robot dalam air)
Robot ini digunakan di bawah laut untuk memonitor kondisi bawah laut dan juga untuk mengambil sesuatu di bawah laut. [10]
2.2. Robot Line Follower Omniwheel
Robot Line Follower merupakan suatu bentuk robot bergerak otonom yang mempunyai misi mengikuti suatu garis pandu yang telah ditentukan.Robot line follower ini pada bagiannya bawahnya mempunyai sensor lantai, sehingga dapat mengetahui keberadaan garis pandu. Prinsip kerja pendeteksian garis pandu dari robot tersebut adalah bahwa tiap-tiap warna permukaan memiliki kemampuan memantulkan cahaya yang berbeda-beda. Warna putih memiliki kemampuan memantulkan cahaya yang lebih banyak. Sebaliknya, warna-warna gelap memiliki lebih sedikit kemampuan memantulkan cahaya. Hal itulah yang digunakan untuk mendeteksi garis pandu tersebut. Sebagai penggeraknya digunakan motor yang dilengkapi dengan driver motornya dan memiliki roda omniwheel. Dan juga sebagai pengontrolnya digunakan mikrokontroler BS2p40. [3] [4]
A. Omniwheel Robot vs Non-Omniwheel
8 dapat bergerak baik dalam arah X dan Y, tetapi membutuhkan gerakan kompleks untuk mencapai arah X. [4]
Sebuah robot omniwheel pada gambar 2.1 mobil dapat bergerak ke segala arah. Ini tidak perlu melakukan gerakan yang kompleks untuk mencapai posisi tertentu. Jenis robot akan memiliki 2 derajat kebebasan karena dapat bergerak baik di X dan Y bebas pesawat. Sebuah lengan robot biasanya adalah omniwheel juga, dengan lebih banyak derajat kebebasan. [4]
Gambar 2.1 jenis robot menggunakan roda standar dan yang menggunakan omniwheel
Keuntungan dari roda omniwheel adalah memliki kemampuan pergerakan yang bebas, sedangkan roda standar memiliki pergerakan yang terbatas. Pengaturan posisi roda mempengaruhi pergerakan robot secara signifikan, jika dengan roda standar semakin jauh jarak roda depan dengan roda belakang maka semakin sulit untuk memutar posisi robot. Dengan menggunakan empat buah roda omniwheel maka di posisikan secara merata di ke empat sisi robot [4]
Kekurangan dari roda omniwheel, roda omniwheel kurang efisiensi karena tidak semua roda berputar dalam arah gerak robot dan roda juga memiliki gaya gesek yang cukup besar. [4]
B. Roda Omniwheel
9 Omniwheel terdiri dari roda inti besar dan sepanjang periferal ada terdapat banyak roda kecil tambahan yang mempunyai poros tegak lurus pada roda inti, dan juga dikenal sebagai penggerak roda omni-directional atau omni-roda untuk jangka pendek, kadang-kadang ditulis sebagai omniwheel. [4] [5]
Gambar 2.2 Jenis – Jenis Omniwheel
2.3. Mikrokontroler Basic Stamp (BS2P40)
Basic stamp adalah mikrokontroler yang dikembangkan oleh Parallax Inc yang diprogram menggunakan format bahasa pemrograman basic.Program yang dibuat di-download melalui port serial dan dapat menggunakan konverter USB to Serial untuk komputer yang tidak memiliki port serial. Mikrokontroler basic stamp membutuhkan powersupply saat mendownload pemrograman dan tidak kehilangan program yang sudah di download saat baterai atau power supply dicabut.
Kode PBasic disimpan di dalam EEPROM serial pada board basic stamp.EEPROM menyediakan penyimpanan yang sulit diubah, yaitu menjaga memory saat kehilangan power. EEPROM digunakan dalam basic stamp 1 dan 2 yang dijamin menyimpan selama 40 tahun ke depan dan mampu ditulisi ulang 10.000.000 kali per lokasi memori.
Mikrokontroler basic stamp memiliki versi yang berbeda - beda. Basic stamp memiliki tujuh versi, yaitu basic stamp 1, basic stamp 2, basic stamp 1e, basic stamp 2P, basic stamp 2Pe dan basic stamp 2sx. Basic stamp jalan pada tegangan DC 5 sampai 15 volt. Pada modul basic stamp terdapat IC regulator LM7805 dengan output 5 volt yang mengubah input 6 hingga 15 volt (pada pin VIN) turun menjadi 5 volt yang dibutuhkan komponen. Basic stamp yang di pakai
10 ini karena membutuhkan banyak input atau output yang dipakai. Berikut ini adalah tampilan basic stamp BS2P40.
Gambar 2.3. Modul basic stamp (BS2P40)
Basic stamp ini mempunyai spesifikasi hardware sebagai berikut:
1. Mikrokontroler basic stamp 2P40 Interpreter Chip (PBASIC48W/P40) 2. 8 x 2Kbyte EEPROM yang mampu menampung hingga 4000 instruksi. 3. Kecepatan prosesor 20MHz Turbo dengan kecepatan eksekusi program
hingga 12000 instruksi per detik.
4. RAM sebesar 38byte (12 I/O, 26 variabel) dengan Scratch Pad sebesar 128 byte.
5. Jalur input / output sebanyak 32 pin.
6. Tersedia jalur komunikasi serial UART RS-232 dengan konektor DB9. 7. Tegangan input 9 – 12 VDC dengan tegangan output 5 VDC.
Berikut ini adalah alokasi pin yang terdapat pada mikrokontroler basic stamp BS2P40.
11 2.4. Motor DC
Roda digerakkan menggunakan empat buah motor DC yang dipasang pada roda sebelah kiri, kanan, depan dan belakang. Motor DC merupakan peralatan elektromekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Seperti pada gambar 2.5. Secara umum, kecepatan putaran poros motor DC akan meningkat seiring dengan meningkatnya tegangan yang diberikan. Dengan demikian, putaran motor DC akan berbalik arah jika polaritas tegangan yang diberikan juga dirubah.
Gambar 2.5. Motor DC
Motor DC juga menggunakan gear berfungsi untuk membantu putaran roda,pemilihan motor gear DC berdasarkan pada putaran dan torsi yang lebih besar di bandingkan dengan motor stepper atau motor servo,juga didasarkan atas ketersediaan di pasaran selain harga murah juga banyak variasinya.Gear DC tidak dapat dikendalikan langsung oleh mikrokontroler, karena kebutuhan arus yang besar sedangkan keluaran arus dari mikrokontroler sangat kecil. Motor driver merupakan alternatif yang dapat digunakan untuk menggerakkan motor DC.
2.5. IC Motor Driver
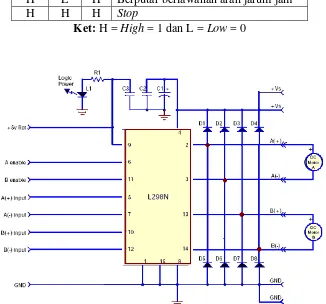
L298 adalah IC yang dapat digunakan sebagai driver motor DC. IC ini menggunakan prinsip kerja H-Bridge. Tiap H-Bridge dikontrol menggunakan level tegangan TTL yang berasal dari output mikrokontroler. L298 dapat mengontrol 2 buah motor DC. Tegangan yang dapat digunakan untuk mengendalikan robot bisa mencapai tegangan 46 VDC dan arus 2 A untuk setiap
12 Gambar 2.6. IC driver motor L298
Pengaturan kecepatan kedua motor dilakukan dengan cara pengontrolan lama pulsa aktif (mode PWM – Pulse width Modulation) yang dikirimkan ke rangkaian driver motor oleh pengendali (mikrokontroler basic stamp). Duty cycle PWM yang dikirimkan menentukan kecepatan putar motor DC.
2.6 PWM (Pulse Width Modulation)
PWM (Pulse width Modulation), adalah sebuah metode untuk pengaturan kecepatan perputaran, dalam hal ini adalah motor DC untuk gerak robot. PWM dapat dihasilkan oleh empat metode, sebagai berikut :
1. Metode analog 2. Metode digital 3. IC diskrit 4. Mikrokontroler
13 Gambar 2.7. Ilustrasi prosentase PWM
Semakin rapat periode antar pulsa, maka frekuensi yang dihasilkan akan semakin tinggi, ini berarti kecepatan akan bertambah. Semakin lebar jarak antar pulsa, maka frekuensi semakin rendah ini berarti kecepatan berkurang atau menurun. Kondisi pemberian kecepatan harus disesuaikan dengan kondisi track yang akan dilewati oleh robot, misal pada saat jalan lurus, naik atau turun harus mendapatkan nilai PWM yang tepat. [1]
2.7 Phototransistor
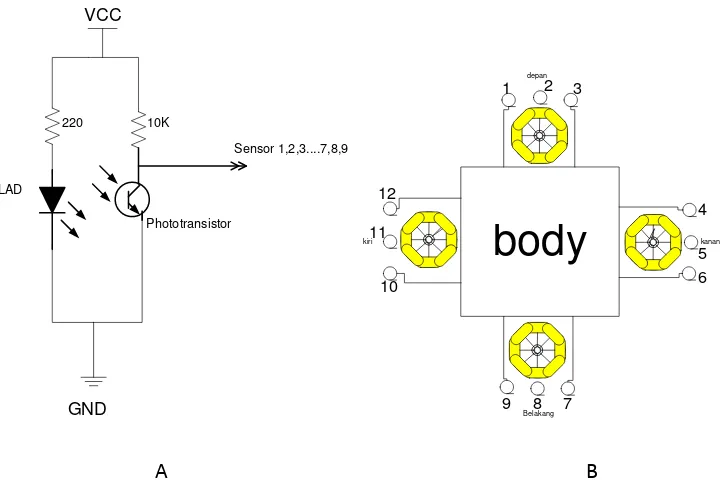
Phototansistor merupakan suatu jenis transistor yang sangat peka trahadap cahaya yang ada disekitarnya. Pada gambar 2.8. dan 2.9. Ketika basis menangkap cahaya maka collectorakan terhubung dengan emitter dalam hal ini transistor bekerja. Prinsip kerja phototransistor sama seperti transistor pada umumnya dengan kata lain phototransistor akan bekerja seperti saklar dengan parameter cahaya untuk mendapatkan kondisi on dan off. Berikut ini adalah simbol phototransistor.
14 VCC
GND
220 10K
LAD
Phototransistor
Sensor 1,2,3....7,8,9
LAD
phototransistor
Garis hitam
Gambar 2.9. gambar rangkaian sensor
2.8. IC LM 393
IC Komparator atau IC pembanding adalah sebuah IC yang berfungsi untuk membandingkan dua macam tegangan yang terdapat pada kedua inputnya. Komparator memiliki 2 buah input dan sebuah output. Inputnya yaitu input(+) dan input (-). Dapat di lihat pada gambar 2.10.b [14]
LM 393 dalam satu kemasannya mempunyai dua buah komparator didalamnya. IC ini memiliki fitur sebagai berikut:
IC komparator LM 393 memiliki fitur-fitur sebagai berikut:
a. Dapat bekerja dengan single supply 2V sampai 36V b. Dapat bekerja dengan tegangan input -3V sampai +36V c. Dapat bekerja dengan segala macam bentuk gelombang logic d. Dapat membandingkan tegangan yang mendekati ground.
15 Cara kerja komparator :
Komparator bekerja berdasarkan tegangan yang masuk pada kedua pin inputnya
1.Jika tegangan pada pin(+) lebih besar pada tegangan pin(-) maka output komparator akan bergerak kearah V+
2.Jika tegangan pada pin(+) lebih kecil pada tegangan pin(-) maka output komparator akan bergerak kearah V-
dalam aplikasinya biasanya salah satu pin input dari komparator sebagai tegangan reverensi sedangkan pin input lainya sebagai tegangan yang akan dibandingkan. [14]
a b
Gambar 2.10. a. Kemasan IC LM393N b. Diagram rangkaian IC LM393N
2.9. Catu Daya
Catu daya memegang peranan yang sangat penting dalam hal perancangan sebuah robot. Tanpa bagian ini robot tidak akan berfungsi. Begitu juga bila pemilihan catu daya tidak tepat, maka robot tidak akan bekerja dengan baik.
Penentuan sistem catu daya yang akan digunakan ditentukan oleh banyak faktor, diantaranya :
1. Tegangan
16 2. Arus
Arus memiliki satuan Ah (Ampere-hour).Semakin besar Ah, semakin lama daya tahan baterai bila digunakan pada beban yang sama.
3. Teknologi Baterai
Baterai isi ulang ada yang dapat diisi hanya apabila benar-benar kosong, dan ada pula yang dapat diisi ulang kapan saja tanpa harus menunggu baterai tersebut benar-benar kosong. [1]
Banyak jenis baterai yang bisa dipakai untuk mensuplai tegangan untuk robot antara lain (Alkaline, Fuel Cell, Lead Acid,Lithium, NiCad, NiMH, baterai Lithium Polymer (LIPO)). Namun catu daya yang digunakan dalam robot ini menggunakan baterai Lithium Polymer (LIPO). Daya yang dimiliki baterai lipo adalah 3,7 V adalah tegangan nominal 1 cell dari kimia LIPO , Tegangan sebenarnya dapat dinaikan sampai pada pengisian ( charging ) maksimum pada 4,25 V dan dapat diturunkan sampai minimum 3,0 V. Serta berat beban baterai lipo cukup ringan di bandingkan jika menggunakan baterai yang jenis lain.
Untuk baterai 2 cell volt yang dibuat SERI adalah 2 x 3,7 V = 7,4 V Untuk baterai 3 cell volt yang dibuat SERI adalah 3 x 3,7 V = 11,1 V Untuk baterai 3 cell volt yang dibuat SERI adalah 4 x 3,7 V = 14,8 V
17 Gambar 2.11. baterai Lithium Polymer (LIPO)
2.10. Regulator Tegangan
Regulator tegangan yang digunakan dalam hal ini adalah regulator tegangan 5 Volt dengan tegangan keluaran yang dihasilkannya ±5 Volt.IC regulator yang digunakan adalah LM7805 seperti ditunjukan pada gambar 2.12. Yang mana keluaran tegangan IC ini adalah ± 5 Volt, dengan tegangan masukan antara 7,2 V sampai 25 V.
Gambar 2.12. LM7805
Pada gambar 2.13. merupakan skematik rangkaian dari regulator tegangan yang digunakan oleh robot line follower ini.
18 2.11. Perangkat Lunak (Software)
2.11.1 Pengenalan Basic Stamp Editor
Perangkat lunak merupakan faktor penting dalam tahap perancangan robot.Perangkat lunak ini merupakan algoritma gerak dan tugas robot dalam bentuk listing program yang ditanamkan kedalam mikrokontroler.Program dapat bermacam-macam bentuk versi dan bahasa pemrogramannya, sesuai dengan spesifikasi dari mikrokontroler yang digunakan.
Mikrokontroler basic stamp (BS2P40) menggunakan bahasa pemrograman basic. Software yang digunakan adalah basic stamp editor.Basic stamp editor adalah sebuah editor yang dibuat oleh Paralax Inc untuk menulis program, mengkompile dan mendownloadnya ke mikrokontroler keluarga basic stamp. Program ini memungkinkan penggunanya memprogram basic stamp dengan bahasa basic yang relatif ringan dibandingkan bahasa pemrograman lainnya.Berikut ini beberapa instruksi-instruksi dasar yang dapat digunakan pada mikrokontroler basic stamp. [1]
Tabel 2.1. Beberapa instruksi dasar basic stamp
Instruksi Keterangan
DO...LOOP Perulangan
GOSUB Memanggil prosedur IF..THEN Percabangan
FOR...NEXT Perulangan
PAUSE Waktu tunda milidetik IF...THEN Perbandingan
PULSOUT Pembangkit pulsa PULSIN Menerima pulsa
GOTO Loncat ke alamat memori tertentu HIGH Menset pin I/O menjadi 1
LOW Menset pin I/O menjadi 0
19 Gambar 2.14. Tampilan basic stamp editor
1. Nama editor, nama folder dan nama file yang sedang dibuka/dikerjakan
2. Menu utama editor
3. Shortcut untuk menyimpan,cut,copy,paste,print dll Nama file yang sedang dikerjakan
4. Pemilihan jenis mikrokontroler yang digunakan 5. Pemilihan versi compiler PBASIC
6. Menjalankan / RUN program 7. Area utama pengetikan program
8. Status posisi kursor berada (baris-kolom) 9. List file-file yang ada di folder kerja
10. Folder utama yang digunakan untuk menyimpan file-file kerja
2.11.2 Memprogram Basic Stamp
Dalam pemrograman, sebuah program lengkap secara umum dapat dibagi menjadi empat bagian penting, yaitu :
20 4. Prosedur
Pemrograman dalam basic stamp editor, secara blok dibagi menjadi empat bagian penting. [1]
Gambar 2.15. Urutan bagian dari program dalam basic stamp
2.11.2.1 Directive
Directive ditulis paling awal program yang dibuat.Bagian ini menentukan tipe prosesor yang digunakan dan versi dari compiler PBASIC yang digunakan untuk mengkompile bahasa basic menjadi bahasa mesin. Tampilannya adalah seperti gambar berikut : [1]
Gambar 2.16. Tampilan bagian directive
2.11.2.2 Menentukan Variabel
Menentukan PINmikrokontroler yang digunakan serta membuat variabel.Ada beberapa ketentuan untuk mendeklarasikan variabel yaitu :
1. PIN : PIN dari mikrokontroler (0-15) 2. VAR : Variabel
3. CON : Konstanta
PINyang digunakan sudah ditentukan sesuai dengan konfigurasi hardware / mainboard yang digunakan adalah BS2P40.Selain itu
Directive
Deklarasi variabel
Program utama
21 dapat membuat variabel bebas yang nantinya dapat digunakan untuk keperluan perulangan atau yang lainnya. [1]
Gambar 2.17. Tampilan bagian deklarasi variabel
Setelah menentukan variabal dan PIN yang digunakan, selanjutnya membuat program utama. Pada bagian program utama bisa melakukan dua mode, yaitu mode pengetikan langsung atau mode pemanggilan prosedur. Mode pengetikan langsung akan efektif jika program tidak terlalu banyak dan hanya untuk menangani kasus yang sederhana. Tetapi jika program sudah mulai banyak, rumit dan lebih dari satu slot, maka sebaiknya program utama memanggil prosedur. Pemanggilan prosedur akan mempermudah urutan/alur program,lebih terkendali dan mudah dalam pemeriksaan. [1]
2.11.2.3 Bagian Program Utama
Berikut ini contoh program utama yang memanggil prosedur MAJU.Listing programnya dapat dilihat pada gambar berikut.
Gambar2.18. Tampilan bagian program utama yang memanggil prosedur
2.11.2.4 Bagian Prosedur
22 Gambar 2.19. Tampilan bagian prosedur MAJU
Sebuah prosedur harus mempunyai nama prosedur yang disimpan dibagian paling atas prosedur itu sendiri, serta harus diakhiri dengan Return supaya kembali lagi ke program utama dan melanjutkan kembali urutan program berikutnya. Sebuah prosedur mempunyai fungsi khusus, misal untuk prosedur maju ini hanya bertugas untuk menjalankan robot dengan arah maju. [1]
2.11.2.5. Memeriksa Sintaks Program
Sangat penting untuk memeriksa sintaks program, hal ini dapat dilakukan untuk memastikan semua sintaks sudah benar. Untuk memeriksa sintaks ini bisa pilih menu RUN, Cek Syntax atau kombinasi tombol CTRL+T. Berikut ini adalah tampilan jika listing program yang dibuat sudah benar. [1]
Gambar 2.20. Hasil pemeriksaan sintaks yang sukses (tokenize successful)
2.11.3 Menjalankan Program
24
BAB III
PERANCANGAN SISTEM
Pada bab ini diterangkan tentang langkah-langkah dalam merancang atau membuat robot line follower tersebut. Perancangan ini meliputi perancangan keras (hardware) maupun perangkat lunak (software). Perancangan hardware meliputi perancangan skematik rangkaian, komponen elektronik yang dibutuhkan, desain PCB, dll. Perancangan software meliputi perancangan algoritma program, pembuatan program, dll.
3.1. Diagram Blok System
Bab ini membahas tentang perancangan mengenai komponen-komponen yang digunakan pada robot line follower.Sebelum masuk di perancangan hardware dan software maka akan di buat terlebih dahulu diagram blok sistem
Sensor lantai Komparator
Gambar 3.1 Diagram Blok Syatem
Berikut penjelasan tentang tiap-tiap blok sistem pada gambar 3.1. 1. Mikrokontroler
25
bergerak sesuai dengan pembacaan sensor agar robot tidak keluar jalur yang telah ditentukan.
2. Sensor Garis
Sensor garis sebagai pengirim menggunakan lad dan sebagai penerima menggunakan pototransistor yang masing-masing berjumlah 12 sensor. Sensor garis ini berfungsi untuk mendeteksi jalur yang ada, dan data yang ada kan di atur komparator, selanjutnya data digital di kirim ke mikrokontroler sehingga mikrokontroler dapat mengatur pergerakan robot agar tidak keluar dari jalur.
3. Komparator LM 393
Komparator disini menggunakan IC LM393,komparator berfungsi untuk mengatur sensor garis agar pembacaan sensor pada jalur selalu tepat, dan selanjutnya data pada sensor di kirim ke mikrokontroler. Karena IC LM393 memiliki dua buah op-amp,tiap op-amp mengontrol satu sensor, sedangkan sensor memiliki 12 sensor maka pada komparator ini menggunakan 6 buah IC LM393.
4. Driver Motor
Driver motor berfungsi sebagai sakelar untuk mengatur pergerakan motor, dalam robot line follower ini menggunakan dua driver motor tiap driver motor mengontrol dua motor dan dapat mengatur motor DC berputar atau tidak, driver motor pertama mengontrol motor pada roda kiri dan kanan dan pada driver motor ke dua mengontrol motor pada roda depan dan belakang.
5. Motor DC
26
berfungsi untuk menambah tenaga putaran agar motor DC dapat berputar dengan beban yang ada pada robot
6. Roda Omniwheel
Omniwheel roda adalah roda dengan 2 derajat kebebasan, omniwheel tidak seperti roda biasa tetapi sebuah roda khusus. Omniwheel terdiri dari roda inti besar dan sepanjang periferal ada terdapat banyak roda kecil tambahan yang mempunyai poros tegak lurus pada roda inti. Roda ohmniwheel ini dipasang pada motor DC yang telah memiliki gearbox sehingga mengikuti putaran dan gerakan motor DC. Pada perancangan ini menggunakan 4 buah roda omniwheel yang terdapat pada sebelah kiri dan kanan terdapat masing-masing satu buah,sebelah kiri 1 buah sebelah kanan 1 buah dan tardapat pada depan dan belakang masing-masing 1 buah, bagian depan 1 buah dan bagian belakang 1 buah jadi keseluruhannya menggunakan 4 buah roda omniwheel.
3.2. Perangkat Keras (Hardware)
3.2.1. Perancangan Mekanik
Pada robot line follower ini dipasang empat motor DC, yang dipasang pada tiap samping robot yang mana saat maju keempat motor akan bergarak bersamaan tetapi memiliki putaran yang berbeda sehingga menghasilkan putaran maju, semua komponen sperti mikro, driver motor,komparator dan baterai smuanya terletak di atas robot, sedangkan sensor, motor DC dan Gearbox diletakkan pada bawah robot. Tinggi robot 10cm, panjang 13cm dan lebar 13cm.
3.2.2. Perancangan Sistem Minimum
27
pengaturan pulse width modulation (PWM) dapat dengan mudah di program.
Gambar 3.2. Rangkanan Mikrokontroler Basic stamp 2P40
Tabel 3.1. Konfigurasi port yang digunakan pada mikrokontroler basic stamp
Nama Pin No. Pin Fungsi Keterangan
MAIN I/O 0 input Sensor1
MAIN I/O 1 input Sensor2
MAIN I/O 2 input Sensor3
MAIN I/O 3 input Sensor4
MAIN I/O 4 input Sensor5
MAIN I/O 5 input Sensor6
MAIN I/O 6 input Sensor7
MAIN I/O 7 input Sensor8
MAIN I/O 12 input Sensor9
MAIN I/O 9 input Sensor10
28
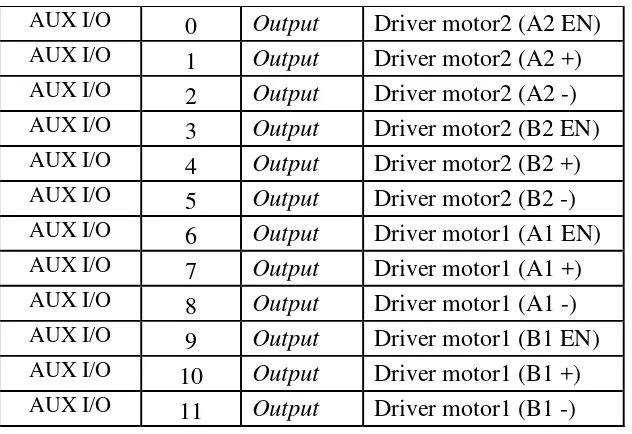
AUX I/O 0 Output Driver motor2 (A2 EN) AUX I/O 1 Output Driver motor2 (A2 +) AUX I/O 2 Output Driver motor2 (A2 -) AUX I/O 3 Output Driver motor2 (B2 EN) AUX I/O 4 Output Driver motor2 (B2 +) AUX I/O 5 Output Driver motor2 (B2 -) AUX I/O 6 Output Driver motor1 (A1 EN) AUX I/O 7 Output Driver motor1 (A1 +) AUX I/O 8 Output Driver motor1 (A1 -) AUX I/O 9 Output Driver motor1 (B1 EN) AUX I/O 10 Output Driver motor1 (B1 +) AUX I/O 11 Output Driver motor1 (B1 -)
3.2.3. Perancangan sensor garis
Sensor garis berfungsi untuk mendeteksi warna yang berada di bagian bawah robot line follower dengan maksud agar robot dapat bergerak sesuai dengan jalur yang telah di tentuin agar robot tidak keluar dari jalur.
Pada sensor garis menggunakan lad sebagai pengirim sedangkan penerimanya menggunakan phototransistor sebagai penerima
led phototransistor
Garis hitam
led phototransistor
Garis hitam
29
Gambar 3.4. A.Rangkaian sensor B. posisi tiap-tiap sensor dan roda
Arus yang boleh mengalir di dalam lad super brigh yaitu minimal 10mA dan maximal 30mA. Untuk mengetahui resistor yang digunakan pada rangkaian maka menggunakan rumus persamaan 3.1
... 3.1 ... 3.2 Ket :
R = nilai hambatan V = tegangan sumber Vir =tegangan pada led Imax = arus maximal pada led Imin = arus minimal pada led
Jadi untuk mengetahui batas maximal dan minimal penggunaan resistor maka masukan nilai pada rumus.
R= belum di ketahui V= 5V
Vir= 2,2V
30
Maka batas minimal resistor yang boleh digunakan pada lad super brigh yaitu 93,3Ω sedangkan batas maksimum digunakan 280Ω jadi diperbolehkan menggunakan resistor diantara 93,3Ω sampai 280Ω. Jika menggunakan resistor kekecilan tahanannya maka akan berakibat rusaknya lad super brigh karena arusnya yng di hasilkan akan berlebilah dari yang seharusnya dan jika menggunakan resistor melebihi 280Ω maka rangkaian tidak akan berfungsi karena tidak ada arus yang melewati rangkaian lad super brigh.
Phototransistor adalah merupakan sebuah transistor yang akan saturasi pada saat menerima sinar lad super brigh dan cut off pada saat tidak ada sinar lad super brigh. led module adalah sebuah rangkaian yang terdiri dari sebuah phototransistor dan filter yang terbentuk dalam satu modul di mana kolektor dari phototransistor merupakan output dari modul ini. Pada saat phototransistor cut off maka tidak terjadi aliran arus dari kolektor menuju ke emitter sehingga kolektor yang merupakan output dari led module akan berkondisi high. Apabila phototransistor saturasi maka arus mengalir dari kolektor ke emitter dan output dari led moduleakan berkondisi low.
Transmisi data dilakukan dengan menggunakan prinsip aktif dan non-aktifnya LED Super brigh sebagai kondisi logic 0 dan logic 1. Pada rangkaian ini menggunakan 12 pasang sensor yang didesain sesuai pergerkan robot. Dan data dari sensor akan di kirim ke komparator selanjutnya data digital yang dari komparator dikirim ke mikrokontroler agar dapat mengatur pergerakan robot sesuai dengan jalur yang ada
31
Pada gambar 3.5. merupakan skematik rangkaian sensor garis menggunakan komparator menggunakan IC LM393.
Gamabar 3.5. Rangkaian sensor garis
3.2.4. Motor Driver
L298 bisa men-drive dua buah motor dc sampai tegangan maksimal 46 VDC dan arus sebesar 2A untuk tiap kanal, supply tegangan yang
diberikan ke motor dc sebesar 14,8 VDC yang berasal dari baterai litium
polimer (lipo) 2200mAh, sedangkan untuk tegangan logic pada driver motor diberikan tegangan sebesar 5 VDC yang berasal dari mikrokontroler.
Penggunaan dioda pada perancangan driver motor ini ditujukan agar driver motor dapat menahan arus balik yang datang dari motor dc.
Satu motor dapat dikontrol dengan 3 pin yaitu Aenable, A+ dan A-. Dan dikarenakan robot ini menggunaka empat buah motor dc maka dibutuhkan dua buah driver motor yang tiap driver motor mengatur dua buah motor dc. Berikut ini adalah tabel kebenaran untuk salah satu motor.
32
Tabel 3.2. Tabel kebenaran untuk salah satu motor
AEN A+ A- Reaksi Motor
L L L Motor off L L H Motor off L H L Motor off L H H Motor off
H L L Stop
H H L Berputar searah jarum jam
H L H Berputar berlawanan arah jarum jam
H H H Stop
Ket: H = High = 1 dan L = Low = 0
Gambar 3.6. Rangkaian driver motor L298
Pengontrolan empat buah motor kiri, kanan, depan dan belakang dibutuhkan 12 port output pada mikrokontroler, yaitu untuk motor kiri masing-masing AEN1, A+1, A-1, motor kanan BEN1,
B+1, B-1, dan untuk mengontrol motor depan AEN2, A+2 , A-2,
motor belakang BEN2, B+2, B-1 seperti yang terlihat pada tabel
33
Tabel 3.3. Tabel kebenaran untuk empat motor
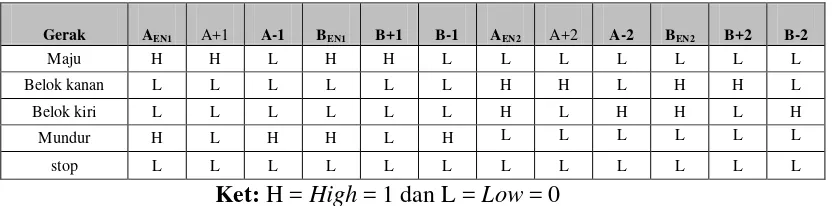
Ket: H = High = 1 dan L = Low = 0
1. Pengaturan gerak robot dengan detode PWM
Pada dasarnya PWM yang dihasilkan mikrokontroler akan berubah menjadi tegangan analog yang akan diterima oleh bagian motor driver. Jika PWM diberi kondisi High, maka tegangan keluaran mendekati 14,8 Volt, dan jika PWM diberi kondisi Low, maka tegangan keluaran mendekati 0 Volt. Diantara kondisi itu maka nilai tegangan keluaran dapat dihitung, yaitu :
(Duty ÷ 255) x 14,8 V.
Sebagai contoh, ketika Duty adalah 100, maka :
(100 ÷ 255) x 14,8 V = 5,8 V, tegangan keluaran PWM sebesar 5,8 V.Duty cycle sebagai pengaturan kecepatan, mulai (0-255)
Hal-hal yang harus diperhatikan dalam pemrogramannya adalah nama pin tujuan, lamanya PWM diberikan dan kecepatannya (duty cycle).Perintah yang digunakan dalam pemrograman bahasa basic untuk mikrokontroler BS2P40 adalah sebagai berikut :
Syntax: PWM Pin, Duty, Duration Keterangan :
1. Pin adalah variable, dengan rentang nomor pin dari (0-11). 2. Duty adalah variabel, (0-255), menentukan besarnya tegangan
analog, yang oleh motor driver akan diterima untuk mengatur kecepatan putarannya.
3. Duration adalah varibel (0-255) untuk durasi PWM tersebut dikerjakan.
Gerak AEN1 A+1 A-1 BEN1 B+1 B-1 AEN2 A+2 A-2 BEN2 B+2 B-2
Maju H H L H H L L L L L L L
Belok kanan L L L L L L H H L H H L
Belok kiri L L L L L L H L H H L H
Mundur H L H H L H L L L L L L
34
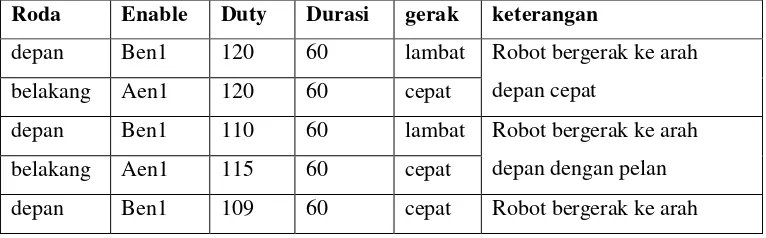
Pada tabel 3.4, tabel 3.5, tabel 3.6, dan tabel 3.7 adalah hasil uji coba pada pengaturan gerak roda menggunakan PWM :
Tabel.3.4. pengaturan gerak motor roda kiri dan kanan bergerak maju Roda Enable Duty Durasi gerak keterangan motor kiri dan kanan bergerak sama cepatnya Kanan Ben2 90 60 lambat
Tabel 3.5. pengaturan gerak motor roda kiri dan kanan bergerak mundur Roda Enable Duty Durasi gerak keterangan kiri dan kanan bergerak sama cepatnya
Kanan Ben2 108 60 lambat
35
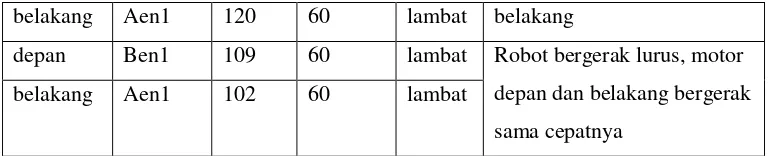
belakang Aen1 120 60 lambat belakang
depan Ben1 109 60 lambat Robot bergerak lurus, motor depan dan belakang bergerak sama cepatnya
belakang Aen1 102 60 lambat
Tabel 3.7. pengaturan gerak motor roda depan dan belakang bergerak kiri Roda Enable Duty Durasi gerak keterangan motor depan dan belakang bergerak sama cepatnya belakang Aen1 102 60 lambat
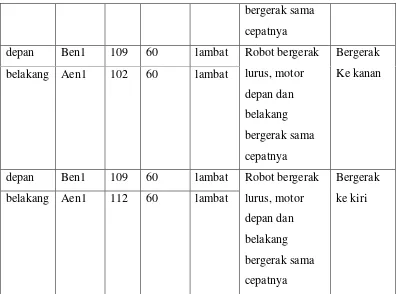
Pada hasil percobaan pengaturan PWM di atas maka di dapat hasil yang cocok untuk digunakan pada pemrograman pada PWM. Berikut hasil duty dan durasi yang digunakan pada pemrograman motor DC
Tabel 3.8. duty dan durasi yang digunakan pada PWM
36
bergerak sama cepatnya depan Ben1 109 60 lambat Robot bergerak
lurus, motor depan dan belakang bergerak sama cepatnya
Bergerak Ke kanan belakang Aen1 102 60 lambat
depan Ben1 109 60 lambat Robot bergerak lurus, motor depan dan belakang bergerak sama cepatnya
Bergerak ke kiri belakang Aen1 112 60 lambat
3.2.5. Motor DC
Motor DC digunakan sebagai penggerak bebuah robot yang di kendalikan oleh driver motor yang berfungsi sebagai sakelar untuk mengatur gerakan motor yang dikontrol oleh mikrokontroler. Pada robot ini menggunakan empat buah motor dc yang menggunakan motor dc 12 Volt. Menggunakan motor dc 12 volt dikarenakan berat beban robot dan memiliki putaran yang kuat sehingga diharapkan motor dc mampu berputar dengan beban yang cukup besar
Gambar 3.7. Motor DC 12 Volt
37
dijual di pasaran. Gearbox yang digunakan mempunyai skala 1:78 yang artinya 1 putaran pada roda sebanding dengan 78 kali putaran pada motor dc.
3.2.6. Roda Ohmniwheel
Holonomic roda adalah roda dengan 2 derajat kebebasan, omniwheel tidak seperti roda biasa tetapi sebuah roda khusus. Omniwheel terdiri dari roda inti besar dan sepanjang periferal ada terdapat banyak roda kecil tambahan yang mempunyai poros tegak lurus pada roda inti. [5]
Gambar 3.8. Roda Ohmniwheel
3.2.7. Sumber Tegangan
A. Baterai
Pada robot ini menggunakan dua buah baterai lipo yang memiliki tegangan 14,8 Volt 2200mAh yang ada di pasaran. Sumber tegangan ini digunakan untuk memberi sumber tegangan pada semua komponen yang digunakan. [13]
B. Reglator LM7805
38
Pada regulator ini sudah terdapat pada besicstamp 2P40,sehingga tidak pelu membuat rangkaian regulator lagi.
Gambar 3.9. LM7805
3.3. Perancangan Software
Perangkat lunak merupakan faktor penting dalam tahap perancangan robot.Perangkat lunak ini merupakan algoritma gerak dan tugas robot dalam bentuk listing program yang ditanamkan kedalam mikrokontroler.Program dapat bermacam-macam bentuk versi dan bahasa pemrogramannya, sesuai dengan spesifikasi dari mikrokontroler yang digunakan.
Sistem perangkat lunak merupakan suatu perangkat yang dibuat untuk mengendalikan sistem kerja dari masing-masing komponen. Sistem ini dikendalikan oleh mikrokontroler yang juga mengendalikan perangkat keras yang juga mengendalikan input dan output data serta pertukaran informasi.
Sebelum pembuatan program terlebih dahulu dibuat algoritma programnya dalam bentuk flowchart. Ini bertujuan agar pada saat pemrograman jika terjadi error maka dapat dengan mudah mengetahui letak kesalahan pemrogramannya
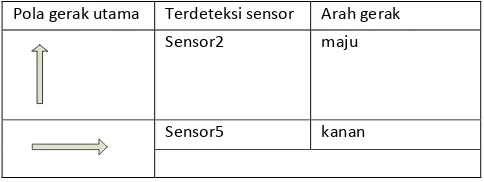
3.3.1. Perancangan algoritma sistem
Tabel 3.9. pola gerak utama robot dan kondisi sensor
Pola gerak utama Terdeteksi sensor Arah gerak Sensor2 maju
39
Sensor11 kiri
Sensor2 Maju 45
Sensor8 mundur
40
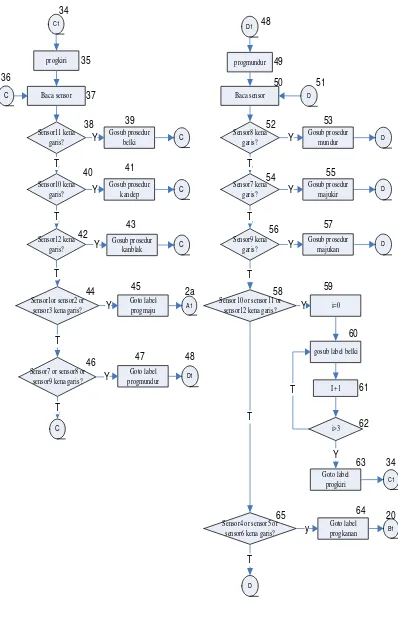
progmaju mulai
Baca sensor
Sensor2 kena garis ? Gosub prosedur maju
Sensor1 kena garis ? Gosub prosedur majukir
Sensor3 kena garis ? Gosub prosedur majukan
Sensor4 or sensor5 kena garis?
sensor2 or sensor3 kena garis?
Goto label progmaju
Sensor7 or sensor8 kena garis?
Goto label progmundur
41
Sensor7 or sensor8 or sensor9 kena garis?
Sensor10 or sensor11 or
sensor12 kena garis? i=0
Sensor4 or sensor5 or sensor6 kena garis?
42
Aktifkan roda kiri putar maju maju
Aktifkan roda kanan putar maju
Aktifkan PWM kiri dan kanan
Aktifkan roda depan putar kanan belka
Aktifkan roda belakang putar kanan
Aktifkan PWM depan dan belakang
Aktifkan roda depan putar kiri belki
Aktifkan roda belakang putar kiri
Aktifkan PWM roda depan dan belakang
Aktifkan roda kiri putar mundur mundur
Aktifkan roda kanan putar mundur
Aktifkan PWM roda kiri dan kanan
return return
Aktifkan roda depan putar kiri
Aktifkan roda belakang putar kanan
Aktifkan roda kiri putar belakang
Aktifkan roda kanan putar depan
return
majukan
Aktifkan roda depan putar kanan
Aktifkan roda belakang putar kiri
Aktifkan roda kiri putar depan
Aktifkan roda kanan putar belakang
return
kanandep
Aktifkan roda kanan putar depan
Aktifkan roda kiri putar belakang
Aktifkan roda depan putar kiri
Aktifkan roda belakang putar kanan
return
kananblak
Aktifkan roda kanan putar blakang
Aktifkan roda kiri putar depan
Aktifkan roda depan putar kanan
Aktifkan roda belakang putarkiri
return
Aktifkan PWM kiri,kanan,depan,belakang Aktifkan PWM kiri,kanan,depan,belakang Aktifkan PWM kiri,kanan,depan,belakang
43
Penjelasan diagram alir flowchart system pada tabel 3.10 :
Tabel 3.10. penjelasan alir flowchart system
nomor Keterangan
1 Awal pemrograman.
2 Label maju sebagai awal program maju.
2a Sebagai inisialisasi lompatan program dari label program lain. 3 Baca kondisi sensor.
4 Apakah sensor2 deteksi garis?jika ya maka kerjakan program pada nomor 5. jika tidak, maka lakukan yang ada di nomor 7.
5 Jika benar maka panggil prosedur maju untuk gerak robot maju,jika telah maju maka lompat pada no 6 sebagai lompatan untuk baca sensor.
6 Sebagai inisialisasi lompatan menuju baca kondisi sensor.
7 Apakah sensor1 deteksi garis?jika ya,maka kerjakan program pada nomor 8. Jika tidak maka kerjakan program pada nomor 8.
8 Jika benar maka panggil prosedur majukir untuk gerak robot memutar ke arah kiri sebagai koreksi posisi jika robot akan keluar jalur,dan lompat ke baca sensor pada nomor 3.
9 Apakah sensor3deteksi garis?jika ya, maka kerjakan program pada nomor 10. Jika tidak maka kerjakan program di nomor 11.
10 Jika ya maka panggil prosedur majukan untuk memutar arak ke kanan sebagai koreksi posisi ke arak kanan jika robot akan keluar jalur. Dan lompat pada nomor 3 untuk pengecekan sensor.
11 Apakah sensor4 atau sensor5 terdeteksi garis? Jika ya, maka kerjakan pada program no 12. Jika tidak maka cek lagi pada program nomor 13 12 Jika iya maka lompat ke label progkanan untuk melakukan program arah
gerak kanan pada nomor 20 sebagai label progkanan.
13 Apakah sensor10 deteksi garis?jika ya, maka lakukan pada nomor 14. Dan jika tidak maka lakukan program pada nomor 18
14 Masukan nilai 0 pada variabel i
44
17 Apakah variabel i>2? Jika ya maka lompat lagi ke nomor 6 sebagai baca sensor. Jika i<2 maka panggil lagi prosedur kandep pada nomor
15,ulangi terus sampai i>2.
18 Apakah sensor10 atau sensor11 atau sensor12 deteksi garis?jika iya,maka lakukan program di nomor19. Jika tidak maka kembali cek sensor pada nomor 3
19 Lompat pada label progkiri pada nomor 34.
20 Inisialisasi lompatan ke label progkanan sebagai awal label program untuk pergerakan kanan.
21 Label progkanan sebagai awal label program untuk pergerakan kanan 22 Inisialisasi untuk menandakan lompatan ke baca sensor di program
kanan.
23 Pembacaan kondisi sensor.
24 Apakah sensor5 deteksi garis?jika ya,maka lakukan perinta pada nomor 25. Jika tidak,maka lakukan pada nomor 26.
25 Jika ya,maka panggil prosedur putar motor arah kanan untuk pergerakan motor gerak kanan.jika sudah selesai pemanggilan maka lompat pada nomor 23.
26 Apakah sensor4 deteksi garis?jika iya,maka lakukan pada program di nomor 27. Jika tidak maka cek lagi pada nomor 28.
27 Jika ya,maka panggil prosedur kandep,untuk memutar arah gerak ke depan sebagai koreksi posisi jika robot akan keluar garis.setelah perika posisi selesai maka lompat pada baca kondisi sensor lagi.
28 Apakah sensor6 deteksi garis?jika ya,maka kerjakan pada nomor29.jika tidak,maka lakukan pada program di nomor 30.
29 Jika ya,maka panggil prosedur kanblak sebagai putar arah robot untuk koreksi posisi jika robot keluar garis.dan lompat pada pembacaan sensor. 30 Apakah sensor2 atau sensor3 deteksi garis?jika ya,maka lakukan
program nomor 31. Jika tidak,maka lakukan proram di nomor32. 31 Jika ya,maka lompat ke label progmaju untuk menjalankan program
gerak maju yang ada pada nomor 2a.
45
nomor 33. Jika tidak ,maka lompat pada nomor 23 untuk pembacaan kondisi sensor lagi.
33 Jika ya,lompat pada label progmundur untuk melakukan arah gerak mundur yang ada pada program nomor 48.
34 Inisialisasi untuk lompatan dari program sebelumya menuju progkiri untuk melakukan arah gerak kiri.
35 Label progkiri sebagai awal program arah gerak kiri.
36 Sebagai inisialisasi lompatan dari program sebslumnya menuju baca kondisi sensor.
37 Cek kondisi sensor untuk arah gerak kiri.
38 Apakah sensor11 deteksi garis?jika ya,maka lakukan program yang ada di nomor 39. Jika tidak,maka lakukan program di nomor 40.
39 Jika ya, maka panggil prosedur belki untuk arah gerak kiri,dan lompat pada pembacaan sensor pada nomor 37.
40 Apakah sensor10 kena garis?jika ya,maka lakukan program di nomor 41. Jika tidak,maka lakukan perintah di nomor 42.
41 Jika ya,maka panggil prosedur kandep untuk memutar arah ke depan sebagai koreksi posisi jika robot keluar jalur.dan lompat ke pembacaan sensor.
42 Apakah sensor12 deteksi garis?jika ya,maka lakukan perintah di nomor 43. Jika tidak maka lakukan program di nomor 44.
43 Jika ya,maka panggil prosedur kanblak untuk memutar arah belakang sebagai koreksi posisi jika robot mulai keluar garis.dan lompat ke pembacaan kondisi sensor.
44 Apakah sensor1 atau sensor2 atau sensor3 deteksi garis?jika ya,maka lakukan perintah di nomor 45.jika tidak maka lakukan perintah di nomor 45.
45 Jika ya,maka lompat ke label progmaju untuk melakukan pergerakan maju yang ada pada label di nomor 2a.
46 Apakah sensor4 atau sensor5 atau sensor6 deteksi garis?jika ya maka lakukan perintah pada nomor 47. Jika tidak maka lompat pada
46
47 Jika ya,maka lompat ke label progmundur untuk melakukan gerakan mundur yang ada pada nomor 48
48 Inisialisasi label untuk lompatan dari program lain menuju label progmundur.
49 Sebagai awal program untuk program arah gerak mundur. 50 Baca kondisi sensor utuk gerak mundur.
51 Inisialisasi untuk lompatan dari program untuk menuju pembacaan kondisi sensor
52 Apakah sensor8 deteksi garis?jika ya,maka lakukan perintah pada nomor 53. Jika tidak maka lakukan perintah pada nomor 54.
53 Jika ya,maka panggil prosedur mundur untuk arah gerak mundur dan lompat ke pembacaan kondisi sensor pada nomor 50.
54 Apakah sensor7 deteksi garis? Jika ya,maka lakukan perintah pada nomor 55.jika tidak maka lakukan perintah pada 56.
55 Jika ya,maka panggil prosedur mundur untuk arah gerak mundur dan lompat ke pembacaan sensor pada nomor 50.
56 Apakah sensor9 deteksi garis?jika ya,maka lakukan perintah pada nomor 57. Jika tidak maka lakukan perintah pada nomor 58.
57 Jika ya,maka panggil prosedur majukan untuk memutar arah robot ke arah kanan dikarenakan robot mulai keluar jalur sehingga pergerakan ini digunakan untuk koreksi posisi,dan lompat pada nomor 50 untuk
pengecekan sensor.
58 Apakah sensor10 atau sensor11 atau sensor12 deteksi garis?jika ya,maka lakukan perintah selanjutnya.jika tidak maka lakukan perintah pada nomor 65.
59 Masukan variabel i=0.
60 Panggil prosedur belki untuk belok arah kiri. 61 Variabel i+1
62 Apakah nlai i>3?jika tidak maka lompat lagi ke pemanggilan pada nomor 60. Jika ya maka lakukan perintah selanjutnya pada nomor 63. 63 Jika sudah terpenuhi nilai i>3 maka lompat ke label progkiri untuk
47
64 Jika ya,lompat ke label progkiri untuk menjalankan program dengan gerak kiri yang berada pada label di nomor 34.
65 Apakah sensor4 atau sensor5 atau sensor6 deteksi garis?jika ya maka lakukan perintah pada no 64.jika tidak,maka lompat pada pembacaan sensor pada nomor 50 untuk pengecekan sensor
Tabel 3.11. penjelasan flowchart prosedur putaran roda
Label Keterangan
A Awal prosedur maju,untuk menghasilkan arah gerak maju A1 Aktifkan roda kiri putar kedepan.
A2 Aktifkan roda kanan putar kedepan.
A3 Aktifkan PWM kiri dan PWM kanan untuk pengaturan kecepatan roda. ret Kembali ke pemanggilan pada program utama.
B Awal prosedur gerak kanan,untuk menghasilkan arah gerak kanan. B1 Aktifkan roda depan putar kanan.
B2 Aktifkan roda belakang putar kanan.
B3 Aktifkan PWM depan dan PWM belakang untuk pengaturan kecepatan roda
ret Kembali ke pemanggilan pada program utama.
C Awal prosedur gerak kiri,untuk menghasilkan arah gerak kiri. C1 Aktifkan roda depan putar kiri.
C2 Aktifkan roda belakang putar kiri.
C3 Aktifkan PWM depan dan PWM belakang untuk pengaturan kecepatan roda
ret Kembali ke pemanggilan pada program utama.
D Awal prosedur mundur,untuk menghasilkan arah gerak mundur D1 Aktifkan roda kiri putar ke belakang.
D2 Aktifkan roda kanan putar ke belakang.
D3 Aktifkan PWM kiri dan PWM kanan untuk pengaturan kecepatan roda. ret Kembali ke pemanggilan pada program utama.
48
E1 Aktifkan roda kanan putar arah depan. E2 Aktifkan roda kiri putar belakang. E3 Aktifkan roda depan putar kiri. E4 Aktifkan roda belakang putar kanan.
E5 Aktifkan PWM roda kiri,PWM roda kanan,PWM roda depan, PWM roda belakang untuk mengatur kecepatan masing-masing roda.
ret Kembali ke pemanggilan pada program utama.
F Awal prosedur putar arah untuk putar arah ke belakang F1 Aktifkan roda kanan putar arah belakang.
F2 Aktifkan roda kiri putar depan. F3 Aktifkan roda depan putar kanan. F4 Aktifkan roda belakang putar kiri.
F5 Aktifkan PWM roda kiri,PWM roda kanan,PWM roda depan, PWM roda belakang untuk mengatur kecepatan masing-masing roda.
ret Kembali ke pemanggilan pada program utama. G Awal prosedur untuk pergerakan putar arah ke kiri. G1 Aktifkan roda depan putar kiri.
G2 Aktifkan roda belakang putar kanan. G3 Aktifkan roda kiri putar belakang. G4 Aktifkan roda kanan putar depan
G5 Aktifkan PWM roda kiri,PWM roda kanan,PWM roda depan, PWM roda belakang untuk mengatur kecepatan masing-masing roda.
ret Kembali ke pemanggilan pada program utama. H Awal prosedur untuk pergerakan putar arah ke kanan. H1 Aktifkan roda depan putar kanan.
H2 Aktifkan roda belakang putar kiri. H3 Aktifkan roda kiri putar depan. H4 Aktifkan roda kanan putar belakang
H5 Aktifkan PWM roda kiri,PWM roda kanan,PWM roda depan, PWM roda belakang untuk mengatur kecepatan masing-masing roda.
49
3.4 Perancangan Maket Lapangan
Gambar 3.12. Jalur lintasan robot
50 BAB IV
PENGUJIAN DAN ANALISA
Tujuan pengujian mengukur sisi fungsional tiap alat pengujian hardware meliputi pengujian hardware dan software
4.1. Pengujian dan Analisa Modularitas ( pengujian tiap blok komponen )
Pengujian ini bertujuan untuk mengetahui cara kerja dan nilai masing-masing tiap blok komponen diantaranya yaitu sensor lantai,komparator, drivel motor L298.
4.1.1. Pengujian Dan analisa Sensor Lantai
Tabel 4.1. Logika sensor
kondisi sensor logika lampu indikator
kena garis low ( 0 ) menyala tidak kena garis high ( 1 ) mati
Berdasarkan pengujian sensor lantai pada tabel.4.1 terhadap garis, Sifat dari warna putih yaitu memantulkan cahaya dan warna hitam yaitu menyerap cahaya. Sehingga pada saat tidak kena garis maka intensitas infrared yang di terima photo transistor besar maka tahanan photo transistor akan semakin kecil dan akan menghasilkan nilai high (1), sedangkan jika kena garis maka intensitas infra red yang diterima photo transistor jika kecil maka tahanan yang dimiliki photo transistor akan besar sehingga akan menghasilkan nilai low (0).
4.1.2. Pengujian Dan Analisa Komparator
51 Tabel 4.2. Hasil pengujian sensor
sensor
Nilai saat sensor kena garis Nilai saat sensor tidak kena garis Vin Low
Vin : Tegangan sebelum masuk komparator Vo : Tegangan setelah masuk komparator
52 4.1.3. Pengujian Dan Analisa Driver Motor LM298
Hasil pengujian untuk mengendalikan motor DC yang terhubung dengan driver motor dapat dilihat pada tabel 4.3
Tabel 4.3. Hasil pengujian perputaran motor DC
Enable IN+ IN- Keadaan motor Hasil pengujian
0 X X Tidak berputar Sesuai
1
0 0 Tidak berputar Sesuai
0 1 Berputar Sesuai
1 0
Berputar ke arah sebaliknya
Sesuai
1 1 Tidak berputar sesuai
Enable sebagai pengaktifan putaran motor dan juga sebagai pengaturan Pulse-width modulation( PWM ) cepat atau pelan putaran motor tergantung dari besar
atau kecilnya nilai PWM, makin besar nilai PWM maka makin cepat putaran motor. Apapun nilai yang di dapat pada IN+ atau IN- jika enable berlogika low(0) maka driver motor tidak akan berputar dan jika salah satu IN+ atau IN- berlogika high(1) dan enable selalu aktif dan berlogika High(1) maka motor akan berputar 4.2. Pengujian dan Analisa Integratif ( pengujian hardware dan software )
Pengujian ini bertujuan untuk menguji pergerakan robot beserta programnya supaya robot bergerak sesuai keinginan. Pengujian ini meliputi pengujian gerak robot tanpa sensor dan dengan menggunakan sensor, pengujian pola gerak belok, serta pengujian keseluruhan pergerakan pada jalur.
4.2.1. Pengujian dan Analisa Pola Gerak Robot Line Fillower
53 Pada pengujian gerak robot di ambil 10 kali percobaan dengan panjang jalur 1 meter.
4.2.2. Pengujian dan Analisa Pola gerak satu arah
Pada pengujian gerak menggunakan sensor, selain program maju yang di uji digunakan juga program pengkoreksian posisi. Jika robot mulai keluar dari jalur maka program koreksi posisi bekerja sehingga arah robot kembali ke posisi lurus.
Tabel.4.4. Percobaan arah gerak maju dengan menggunakan sensor
Percobaan Pwm
kiri
Pwm
kanan
Waktu
tempuh
Sukses/gagal
1 110,60 90,60 4,56 detik sukses 2 110,60 90,60 4,94 detik sukses 3 110,60 90,60 4,35 detik sukses 4 110,60 90,60 5,79 detik sukses 5 110,60 90,60 4,47 detik sukses 6 110,60 90,60 4,72 detik sukses 7 110,60 90,60 4,81 detik sukses 8 110,60 90,60 4,28 detik sukses 9 110,60 90,60 4,66 detik sukses 10 110,60 90,60 5 detik sukses Rata-rata 110,60 90,60 4,758 detik sukses
54 Tabel.4.5. Percobaan arah gerak mundur dengan menggunakan sensor
Percobaan Pwm
Pada tabel.4.5. pada percobaan ini pergerakan sama dengan pergerakan maju yaitu hanya menggunakan sensor sebagai gerakan mundur dan sebagai koreksi posisi, maka waktu yang didapat hanya berbeda untuk mengkoreksi posisi. Jika makin banyak robot keluar jalur maka waktu untuk koreksi posisi jg membutuhkan waktu yg akan lama. Data ini diambil pada tanggal 28 juli 2011 di dalam ruangan.
Tabel.4.6. Percobaan arah gerak kanan dengan menggunakan sensor
55 8 109,60 102,60 5,87 detik sukses 9 109,60 102,60 5,06 detik sukses 10 109,60 102,60 5,44 detik sukses
Pada tabel.4.6. pada percobaan ini di dapat waktu yang tidak jauh ini di karenakan pergerakan ini hanya membutuhkan waktu untuk koreksi posisi pada saat robot keluar jalur. Data ini di ambil pada tanggal 28 juli 2011 di dalam ruangan.
Tabel.4.7. Percobaan arah gerak kiri dengan menggunakan sensor
Percobaan Pwm membutuhkan waktu untuk mengkoreksi posisi.data ini diambil pada tanggal 28 juli 2011 di dalam ruangan.
56 roda makin melambat.makin banyak robot akan keluar jalur maka makin banyak juga waktu yang dibutuhkan untuk koreksi posisi hingga robot berada pada jalur lurus.
4.2.3. Pengujian dan Analisa Pola gerak dua arah
Pada pola gerak ini dilakukan percobaan dua pola gerak sekaligus, masing-masing 1 meter, jadi total pergerakan keseluruhannya 2meter.
Tabel.4.8. percobaan pola gerak maju dan belok kiri
Percobaan Waktu
tempuh
Sukses/gagal
1 12,81 detik Sukses 2 11,84 detik Sukses 3 11,44 detik Sukses 4 6,87 detik Gagal 5 12,47 detik Sukses 6 13,41 detik Sukses 7 5,19 detik Gagal 8 11,47 detik Sukses 9 5,47 detik Gagal 10 12,44 detik Suksess
57 Tabel.4.9. Percobaan pola gerak arah kanan dan maju
Percobaan Waktu tempuh
Sukses/gagal
1 10,84 detik Sukses 2 10,22 detik Sukses 3 9,84 detik Sukses 4 6,57 detik Gagal 5 10,40 detik Sukses 6 11,22 detik Suksess 7 11,13 detik Sukses 8 10,50 detik Sukses 9 9,56 detik Sukses 10 9,97 detik Sukses
Pada tabel 4.9. pada percobaan yang gagal ini dikarenakan pada saat akan belok robot sudah berhenti dan pembacaan sensor sudah tidak dapat deteksi garis sehingga robot sudah tidak dapat menyelesaikan program yang ada. Pada pengujian yang sukses ini pembacaan sensor masih membaca garis hingga akhir sehingga robot sukses menjalankan proses yang ada. Data ini diambil pada tanggal 28 juli 2011 di dalam ruangan.
Tabel.4.10. Percobaan pola gerak maju dan belok kanan
Percobaan Waktu tempuh
Sukses/gagal
58 8 11,06 detik Sukses
9 5,37 detik Gagal 10 11,13 detik Sukses
Percobaan pada tabel.4.10. pada percobaan ini ada beberapa percobaan yang gagal,ini dikarenakan gagal pada saat akan belok. Pada saat akan belok sensor depan sudah tidah deteksi garis maka robot berhenti dan juga sensor kiri sudah tidak dapat deteksi garis maka robot berhenti di tempat. Data ini di ambil pada tanggal 28 juli 2011 di dalam ruangan.
Tabel.4.11. percobaan pola gerak kiri dan belok 45 derajat
Percobaan Waktu tempuh
Sukses/gagal
1 13,20 detik Sukses 2 12,89 detik Sukses 3 13,50 detik Sukses 4 6,20 detik Gagal 5 5,20 detik Gagal 6 12,99 detik Gagal 7 13,5 detik Sukses 8 14,12 detik Sukses 9 5,20 detik Sukses 10 12,87 detik Sukses
59 Tabel.4.12.percobaan pola gerak kanan dan mundur
Percobaan Waktu tempuh
Sukses/gagal
1 13,62 Sukses
2 6,72 Gagal
3 10,28 Sukses
4 11,50 Sukses
5 11,15 Sukses
6 11,72 Sukses
7 17,31 Sukses
8 14,31 Sukses
9 10,87 Sukses
10 9,94 Sukses
Pada tabel.4.12. pada percobaan ini ada beberapa waktu yang lama sampai tujuan,ini di karenakan pinggiran roda omniwheel ini tidak berputar di karenakan ada yang mengganjal pada roda hingga roda kecil tidak bergerak sehingga robot terjadi slip hingga beberapa detik. Dan pada proses yang gagal dikarenakan pada saat belok sensor belakang sudah tidak terdeteksi garis dikarenakan robot sudah berhenti lebih dahulu sebelum sensor terdeteksi garis.dan beberapa proses yang sukses dan butuh waktu yang singkat di karenakan roda kecil pada omniwheel ini berjalan lancar. Data ini diambil pada tanggal 28 juli 2011 di dalam ruangan.
60 4.3. Pengujian dan Analisa Pergerakan Keseluruhan
Pada program yang telah dibuat, robot sudah berhasil mencapai posisi semula tetapi ada beberapa kegagalan yang ada.
Gambar.4.1. maket lapangan
Setelah program di gabung, berikut hasil percobaan pada keseluruhan program dan pergerakan robot
Tabel.4.13. percobaan pergerakan pada jalur
Percobaan Waktu
tempuh
Berheni
pada blok
Sukses/Gagal
1 27,03 detik I Gagal
2 33,78 detik M Gagal
3 38,06 detik A Sukses
61
5 41,66 detik A Sukses
6 40,44 detik A Sukses
7 38,06 detik A Sukses
8 39,59 detik A Sukses
9 23,72 detik J Gagal
10 37,69 detik M Gagal
62 PBAB V
KESIMPULAN
Bab ini berisi kesimpulan dan saran dari hasil perancangan dan pembuatan sistem.
5.1. KESIMPULAN
Berdasarkan uraian yang telah dipaparkan berdasarkan analisis serta uji coba maka di peroleh beberapa kesimpulan yaitu :
1. Berdasarkan tabel.4.1 pada saat intensitas LED yang diterima photo transistor besar maka tahanan photo transistor akan semakin kecil sehingga akan menghasilkan nilai high (1) pada output komparator, sedangkan untuk menghasilkan nilai low (0) jika photo transiPstor menerima intensitas cahaya yang rendah maka tahanan photo transistor akan besar.
2. Berdasarkan pengujian pada tabel.4.2. maka, jika tegangan input lebih kecil dari tegangan referensi (VinL) maka tegangan keluaran pada komparator akan berloika low (VoL), dan jika tegangan input lebih besar dari tegangan referensi (VinH) maka tegangan keluaran akan berlogika high (VoH).