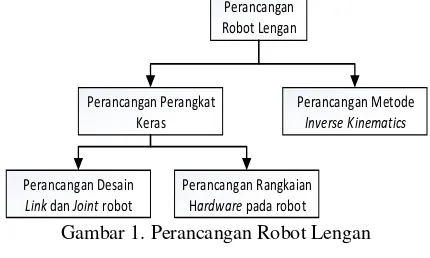
Implementasi Robot Lengan Pemindah Barang 3 DOF Menggunakan Metode Inverse Kinematics
Teks penuh
Gambar
Dokumen terkait
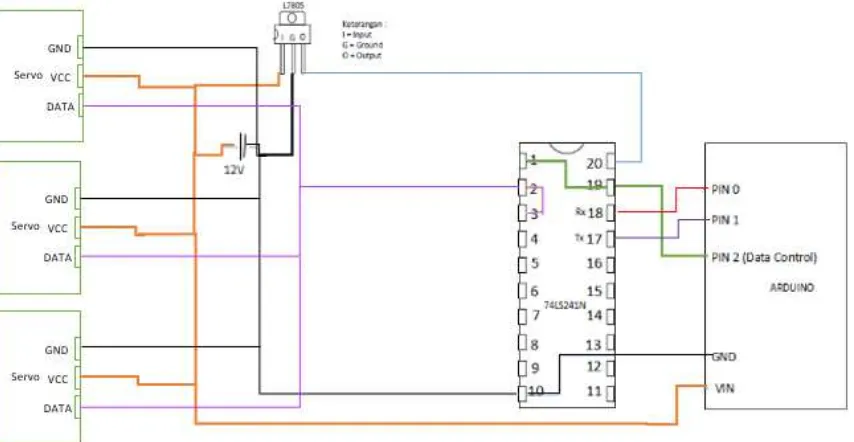
Pergerakan dari robot berdasarkan pada koordinat sumbu X, sumbu Y, dan sumbu Z, dimana robot akan berjalan menuju koordinat yang ditentukan apabila telah menerima inputan dari
Pergerakan dari robot berdasarkan pada koordinat sumbu X, sumbu Y, dan sumbu Z, dimana robot akan berjalan menuju koordinat yang ditentukan apabila telah menerima inputan dari port
Analisa Pergerakan Lengan Robot Manipulator Menggunakan 6 Derajat Kebebasan (DOF) dengan Griper Tipe Barret; Raditya Wahyu Imansyah, 081910101034; 2012: 56
4.3 Hasil Implementasi Metode Pembuatan simulasi manusia ketika berjalan yang telah diimplementasikan dengan metode forward kinematics dan inverse kinematics sebelumnya akan
Sine pattern adalah metode yang dapat kita gunakan bersama inverse kinematics untuk menyederhankan variabel kontrol gerak, dimana metode ini akan menghasilkan sekumpulan
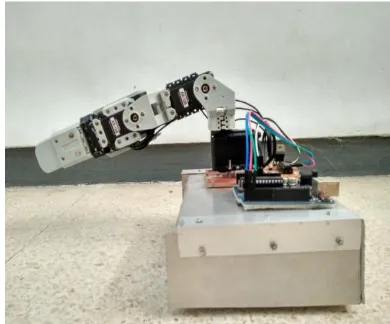
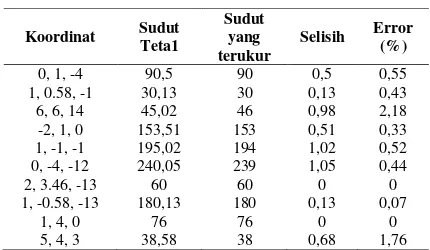
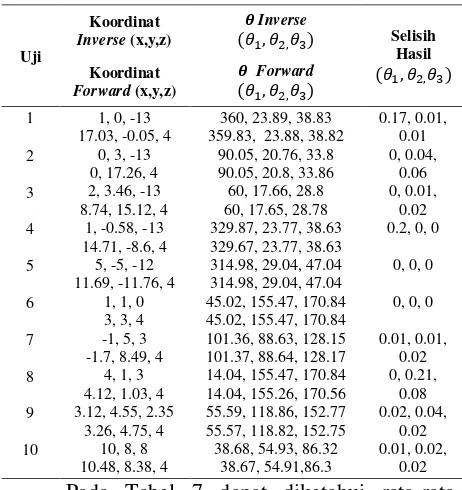
Perancangan robot lengan pemindah barang ini ini dilakukan dengan beberapa kali pengujian untuk menganalisa putaran motor servo dan sensor photodiode sebagai
Perancangan robot lengan pemindah barang ini ini dilakukan dengan beberapa kali pengujian untuk menganalisa putaran motor servo dan sensor photodiode sebagai
SciVal Topic Prominence Topic: Prominence percentile: 76.984 Author keywords ANFIS Arm robot forward kinematics inverse kinematics PUMA 560 Indexed keywords Engineering controlled
