Informasi Dokumen
- Penulis:
- Teguh Hadi Pratama
- Pengajar:
- Dr. Yeffry Handoko Putra, M.T
- Iman Imanudin, S.Si
- Sekolah: Universitas Komputer Indonesia
- Mata Pelajaran: Teknik Komputer
- Topik: Implementasi Algoritma Lucy Richardson Sebagai Restorasi Citra Blur Pada Penginderaan Jauh Muatan Roket
- Tipe: Tugas Akhir
- Tahun: 2012
- Kota: Bandung
Ringkasan Dokumen
I. Pendahuluan: Relevansi Restorasi Citra Blur dalam Penginderaan Jauh Muatan Roket
Bagian ini membahas urgensi restorasi citra blur dalam konteks penginderaan jauh berbasis muatan roket. Citra blur yang disebabkan oleh pergerakan muatan roket selama pengambilan data mengurangi kualitas informasi yang didapat. Oleh karena itu, implementasi algoritma restorasi citra, khususnya Algoritma Lucy-Richardson, menjadi sangat relevan untuk meningkatkan kualitas data dan mencapai tujuan pendidikan tinggi, yaitu menghasilkan lulusan yang mampu memecahkan masalah riil dengan pendekatan teknologi terkini. Kemampuan menganalisis dan menerapkan algoritma pemrosesan citra merupakan keahlian penting yang dibutuhkan dalam bidang penginderaan jauh dan ilmu komputer.
1.1 Latar Belakang dan Perumusan Masalah
Latar belakang menekankan probabilitas tinggi terjadinya citra blur pada penginderaan jauh muatan roket dan kesulitan dalam mengekstrak informasi dari citra tersebut. Perumusan masalah difokuskan pada teknik meminimalkan blur akibat gerakan muatan roket, teknik pengiriman citra dengan komunikasi half-duplex, teknik pengolahan citra (grayscale dan cropping), implementasi algoritma Lucy-Richardson, dan optimasi waktu pengiriman data. Dari sini, terlihat bagaimana penelitian ini dirancang untuk menjawab tantangan praktis dan meningkatkan pemahaman mahasiswa tentang pemrosesan citra dan sistem embedded.
1.2 Maksud dan Tujuan Penelitian
Tujuan utama penelitian ini adalah membangun sistem penginderaan jauh yang mampu merestorasi citra blur akibat ayunan muatan roket, sehingga memudahkan identifikasi objek. Implementasi Algoritma Lucy-Richardson diharapkan dapat merestorasi citra dengan baik dan memaksimalkan pengiriman data dalam waktu sesingkat mungkin. Tujuan ini selaras dengan tujuan pendidikan tinggi untuk menghasilkan lulusan yang kompeten dan inovatif dalam bidang teknologi.
1.3 Batasan Masalah
Penelitian dibatasi pada citra berukuran maksimal 200x200 pixel, format grayscale, komunikasi half-duplex, waktu pengiriman maksimal 45 detik, dan restorasi citra blur akibat motion blur. Batasan ini membantu memfokuskan penelitian dan memberikan ruang lingkup yang terukur bagi mahasiswa untuk memahami metodologi penelitian dan manajemen proyek.
1.4 Metodologi Penelitian
Metodologi penelitian meliputi studi pustaka, observasi, perancangan (perangkat keras dan lunak), pengujian (pengiriman data, deblurring, dan waktu pengiriman), dan analisis data. Tahapan ini mencerminkan proses ilmiah yang sistematis dan mengajarkan mahasiswa tentang siklus hidup pengembangan sistem, mulai dari perencanaan hingga evaluasi. Mahasiswa juga belajar bagaimana merumuskan hipotesis dan menguji validitasnya.
II. Landasan Teori: Algoritma Lucy-Richardson dan Prinsip-prinsip Pengolahan Citra
Bagian ini menjelaskan dasar teori yang mendasari penelitian, yaitu Algoritma Lucy-Richardson, Point Spread Function (PSF), model degradasi citra, dan penginderaan jauh. Pemahaman yang mendalam tentang teori-teori ini penting untuk interpretasi hasil dan pengembangan kemampuan analitis mahasiswa. Penjelasan yang rinci dan terstruktur memungkinkan mahasiswa untuk menguasai konsep-konsep kunci dalam pemrosesan citra dan penerapannya dalam konteks riil.
2.1 Algoritma Lucy-Richardson
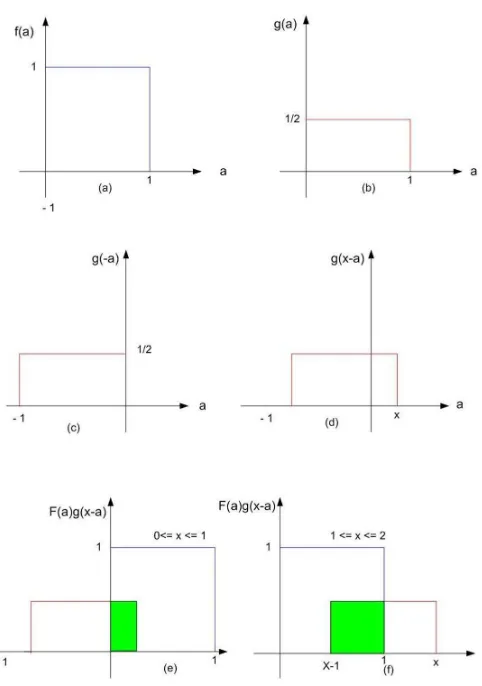
Algoritma Lucy-Richardson dijelaskan secara detail, termasuk persamaannya dan prinsip kerjanya. Konsep konvolusi dan Point Spread Function (PSF) juga dibahas secara menyeluruh. Penjelasan ini memberikan pemahaman yang kuat tentang algoritma pemrosesan citra dan bagaimana ia dapat digunakan untuk merestorasi citra yang terdegradasi. Hal ini membantu mahasiswa membangun pondasi yang kuat dalam bidang pemrosesan citra digital.
2.2 Point Spread Function (PSF)
PSF dijelaskan sebagai model matematis dari proses pengaburan citra. Berbagai jenis PSF (motion blur, Gaussian blur, dll.) dibahas, dan relevansinya terhadap penginderaan jauh muatan roket dijelaskan. Pemahaman tentang PSF sangat penting untuk memilih algoritma pemrosesan citra yang tepat dan menginterpretasi hasil restorasi. Bagian ini melatih mahasiswa dalam berpikir kritis dan memecahkan masalah.
2.3 Model Degradasi Citra
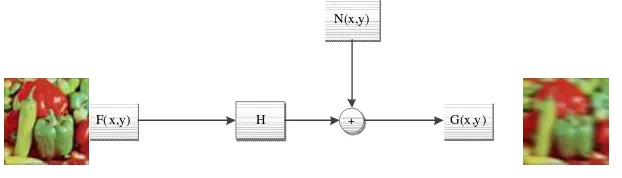
Model degradasi citra dijelaskan, termasuk peran operator distorsi (H) dan derau (n). Pemahaman tentang model ini penting untuk memahami proses restorasi citra. Menjelaskan bagaimana citra asli (f) terdegradasi menjadi citra yang teramati (g). Ini memperkuat pemahaman mahasiswa tentang proses degradasi dan bagaimana algoritma Lucy-Richardson dapat digunakan untuk membalikkan proses tersebut.
2.4 Penginderaan Jauh
Prinsip-prinsip penginderaan jauh dijelaskan, termasuk jenis-jenis pengambilan data (vertikal, oblique, high oblique). Relevansi penginderaan jauh berbasis muatan roket dijelaskan, termasuk kelebihan dan kekurangannya. Ini memberikan konteks aplikasi bagi algoritma Lucy-Richardson dan memperluas pengetahuan mahasiswa tentang teknologi penginderaan jauh.
III. Perancangan Sistem: Arsitektur dan Implementasi
Bagian ini menjelaskan perancangan sistem penginderaan jauh, termasuk arsitektur sistem, proses pengambilan gambar, format paket data, dan perancangan perangkat keras dan lunak. Penjelasan yang rinci dan terstruktur membantu mahasiswa memahami proses desain sistem dan bagaimana berbagai komponen bekerja bersama-sama. Ini melatih mahasiswa dalam berpikir sistematis dan memecahkan masalah kompleks.
3.1 Diagram Blok Sistem
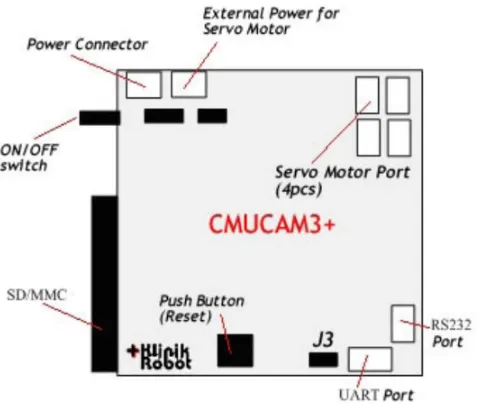
Diagram blok sistem muatan roket dan ground segment dijelaskan secara detail. Komponen-komponen utama sistem, seperti kamera CMUcam3+, mikrokontroler ARM, modem radio, dan antarmuka pengguna, dijelaskan fungsinya. Ini membantu mahasiswa memahami arsitektur sistem dan bagaimana komponen-komponen tersebut berinteraksi.
3.2 Proses Pengambilan Gambar
Proses pengambilan gambar diilustrasikan secara bertahap, mulai dari peluncuran roket hingga pengambilan gambar setelah separasi muatan roket. Penjelasan ini menekankan tantangan yang dihadapi dalam pengambilan gambar dalam kondisi dinamis dan bagaimana sistem dirancang untuk mengatasi tantangan tersebut. Ini memperkenalkan mahasiswa pada kendala dunia nyata dalam implementasi teknologi.
3.3 Format Paket Data
Format pengiriman data grayscale dijelaskan, termasuk penggunaan header untuk identifikasi baris dan penanganan data yang sama dengan header. Penjelasan ini menunjukkan bagaimana data dioptimalkan untuk transmisi efisien. Ini melatih mahasiswa untuk berpikir tentang efisiensi dan optimasi dalam desain sistem.
3.4 Perancangan Perangkat Keras
Spesifikasi perangkat keras, seperti muatan roket, modul CMUcam3+, dan modem radio, dijelaskan secara rinci. Pemilihan komponen dan alasan di balik pilihan tersebut dijelaskan. Ini memperkenalkan mahasiswa pada berbagai pilihan teknologi dan membantu mereka dalam pengambilan keputusan teknis.
3.5 Perancangan Perangkat Lunak
Algoritma yang diimplementasikan pada CMUcam3+ dan antarmuka pengguna pada ground segment dijelaskan secara detail, termasuk flowchart dan penjelasan kode. Ini mengajarkan mahasiswa tentang pemrograman embedded dan pengembangan antarmuka pengguna. Mahasiswa juga belajar bagaimana mengintegrasikan berbagai komponen perangkat lunak untuk mencapai tujuan penelitian.
IV. Analisis dan Hasil: Evaluasi Kinerja Sistem
Bagian ini menganalisis hasil pengujian sistem, termasuk analisis citra blur, proses restorasi, proses grayscale, cropping image, dan waktu pengiriman data. Analisis data yang komprehensif dan interpretasi hasil yang cermat membantu mahasiswa memahami kinerja sistem dan mengidentifikasi area untuk perbaikan. Ini melatih mahasiswa dalam analisis data, evaluasi kinerja, dan penyelesaian masalah.
4.1 Analisa Teknik Pengolahan Citra
Analisis ini meliputi proses grayscale, cropping image, dan restorasi citra blur menggunakan Algoritma Lucy-Richardson. Perbandingan hasil sebelum dan sesudah pemrosesan citra dibahas untuk mengevaluasi efektivitas masing-masing teknik. Ini memberikan pemahaman yang komprehensif tentang teknik pengolahan citra dan aplikasinya dalam memperbaiki kualitas citra.
4.2 Analisa Citra Blur
Jenis-jenis citra blur (motion blur, Gaussian blur) dibahas, dan penyebabnya diidentifikasi dalam konteks penginderaan jauh muatan roket. Analisis ini memberikan pemahaman tentang tantangan yang dihadapi dalam pengambilan citra dalam kondisi dinamis. Ini membantu mahasiswa untuk memahami konteks permasalahan dan pentingnya restorasi citra.
4.3 Analisa Restorasi Citra Blur
Efektivitas algoritma Lucy-Richardson dalam merestorasi citra blur dievaluasi secara kuantitatif dan kualitatif. Parameter yang digunakan untuk evaluasi dijelaskan, dan hasilnya diinterpretasikan. Ini mengajarkan mahasiswa tentang teknik evaluasi kinerja algoritma dan bagaimana menafsirkan hasil secara kritis.
4.4 Analisa Waktu Pengiriman Gambar
Waktu pengiriman data dianalisis dan dibandingkan dengan batasan waktu yang telah ditentukan. Faktor-faktor yang mempengaruhi waktu pengiriman diidentifikasi dan dibahas. Ini melatih mahasiswa dalam analisis kinerja sistem dan optimasi waktu pengiriman data.
V. Simpulan dan Saran: Kesimpulan dan Rekomendasi
Bagian ini merangkum kesimpulan utama penelitian dan memberikan saran untuk penelitian selanjutnya. Kesimpulan yang jelas dan terstruktur membantu mahasiswa untuk menyimpulkan temuan utama penelitian dan mengidentifikasi area untuk perbaikan atau pengembangan lebih lanjut. Ini melatih mahasiswa dalam komunikasi ilmiah dan penyampaian temuan penelitian.
5.1 Simpulan
Kesimpulan penelitian dirangkum secara singkat dan jelas. Temuan utama penelitian, seperti efektivitas algoritma Lucy-Richardson, kinerja sistem, dan waktu pengiriman data, dibahas. Ini merangkum hasil penelitian dan memberikan gambaran keseluruhan tentang kontribusi penelitian.
5.2 Saran
Saran untuk penelitian selanjutnya diberikan, termasuk peningkatan algoritma, optimasi sistem, dan eksplorasi aplikasi lain dari teknologi tersebut. Saran ini menunjukkan area untuk perbaikan atau pengembangan lebih lanjut dan membantu mahasiswa untuk berpikir tentang implikasi dari penelitian mereka. Ini mendorong mahasiswa untuk berpikir kritis dan inovatif.
Referensi Dokumen
- Restorasi Citra Kabur dengan Algoritma Lucy- Richardson dan Perbandingannya dengan Penapis Wiener ( Munir, R. )
- Apa itu Foto Udara ( Wicaksono, F. Y. )
- Some Blind Deconvolution Technique in Image Processing ( Chan, T., park, F., & Yip, A. M. )
- Konvolusi dan Transformasi fourier ( W, Eri Prasetyo )
- Digital Image Processing ( Gonzalez, R. C., & Woods, R. E. )