PERANCANGAN DAN PEMBUATAN ALAT UNTUK
MEMBUKA DAN MENUTUP ATAP OTOMATIS
MENGGUNAKAN SENSOR CAHAYA PADA MINIATUR
RUMAH KACA BERBASIS MIKROKONTROLLER AT89S51
TUGAS AKHIR
BANGKIT KESUMA WARDANA
092408020
PROGRAM STUDI DIII FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERANCANGAN DAN PEMBUATAN ALAT UNTUK
MEMBUKA DAN MENUTUP ATAP OTOMATIS
MENGGUNAKAN SENSOR CAHAYA PADA MINIATUR
RUMAH KACA BERBASIS MIKROKONTROLLER AT89S51
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh gelar Ahli Madya
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERNYATAAN
PERANCANGAN DAN PEMBUATAN ALAT UNTUK MEMBUKA DAN MENUTUP ATAP OTOMATIS MENGGUNAKAN SENSOR CAHAYA PADA MINIATUR RUMAH KACA BERBASIS MIKROKONTROLLER
AT89S51
TUGAS AKHIR
Saya mengakui bahwa Laporan Tugas Akhir ini adalah hasil kerja saya sendiri,
kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan
sumbernya.
Medan, 31 Juli 2012
BANGKIT KESUMA WARDANA
PERSETUJUAN
Judul : PERANCANGAN DAN PEMBUATAN ALAT
UNTUK MEMBUKA DAN MENUTUP ATAP
OTOMATIS MENGGUNAKAN SENSOR CAHAYA
PADA MINIATUR RUMAH KACA BERBASIS
MIKROKONTROLLER AT89S51
Medan, 31 Juli 2012
Disetujui oleh :
Diketahui/Disetujui oleh Program Studi D3 Fisika
Ketua, Pembimbing
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Allah Subhanahuwata’ala, yang
senantiasa melimpahkan karunia-Nya dan selalu memberikan kemudahan dan
kelancaran sehingga penulis dapat menyelesaikan Tugas Akhir ini dalam waktu
yang telah ditetapkan. Dan Sholawat beriring salam semoga senantiasa
tercurahkan kepada Rasulullah sallallahu’alaihiwasalam selalu menjadi inspirasi dan teladan bagi penulis.
Pada kesempatan ini penulis mengucapkan banyak terima kasih penulis
sampaikan kepada berbagai pihak yang telah banyak membantu penulis dalam
penyelesaian Tugas Akhir ini yaitu kepada:
1. Bapak Dr. Sutarman, M.Sc selaku Dekan Fakultas Matematika dan Ilmu
Pengetahuan Alam Universitas Sumatera Utara.
2. Ibu Dr. Susilawati, M.Sc selaku ketua Program studi D-III Fisika Fakultas
Matematika dan Ilmu Pengetahuan Alam.
3. Bapak Dr. H. Nasruddin MN, M. Eng. Sc. Selaku dosen pembimbing.
4. Bapak/ibu staf pengajar serta seluruh pegawai program studi D-III Fisika
Fakultas Matemetika dan Ilmu Pengetahuan Alam.
5. Teristimewa Ayahanda Selamat Pawiro dan Ibunda Satiah yang telah banyak
memberikan dukungan doa, moril, materil, serta sudah menjadi motivator.
6. Kakak saya Irvan Priandanu dan adik saya Widha Aristia atas dukungan
7. Rekan–rekan seperjuangan FIN 09 , khususnya Ridho, Zulkarnain, Iqbal,
Faisal, Yogi, Syahrial, Aswan, yang telah banyak memberi dukungan
semangat dan kerja sama selama masa perkuliahan.
8. Sahabat-sahabat saya Annissa Riafni, Wahyu, Rendhi, Izhar, Wawan, Satria,
dkk yang lainnya terimakasih atas motivasi, kritik dan sarannya.
Penulis menyadari bahwa dalam penyusunan Tugas Akhir ini masih terdapat
kekurangan maupun kesalahan. Untuk penulis sangat mengharapkan kritik dan
saran dari semua pihak untuk penyempurnaan laporan ini.
Akhirnya penulis berharap semoga Tugas Akhir ini dapat bermanfaat bagi
penulis dan pembaca, khususnya rekan-rekan mahasiswa lainnya yang mengikuti
perkuliahan di Universitas Sumatera Utara.
Medan, 31 Juli 2012
ABSTRAK
Kajian ini merupakan pembahasan mengenai perancangan sistem
pengendalian intensitas cahaya pada rumah kaca. Sistem pengendalian alat
intensitas cahaya pada rumah kaca ini dilengkapi menggunakan mikrokontroler
AT89S51 dan Sensor cahaya LDR (Light Defendent Resistor). Dimana
mikrokontroller AT89S51 berfungsi sebagai pengendali semua sistem sedangkan
LDR digunakan untuk mendeteksi intensitas cahaya pada lingkungan sekitarnya.
Ketika sensor LDR menerima sedikit cahaya maka atap akan tertutup dan jika
atap terbuka kembali saat LDR mendapat cahaya yang cukup terang. Adapun
untuk menggerakkan atap pada rumah kaca digunakan Motor Stepper. Motor
stepper dikendalikan oleh Driver Motor Stepper. Dalam sistem ini digunakan voltage devider sebagai pembagi tegangan dan relay sebagai saklar. LDR sebagai
input akan memberikan nilai yang berubah-ubah ke ADC yang terdapat pada
DAFTAR ISI
Pernyataan ... i
Persetujuan ... ii
Kata Pengantar ... iii
Abstrak ... v
Daftar isi ... vi
Daftar Gambar ... x
Daftar Tabel ... xi
BAB I : PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 3
1.3 Tujuan Penulisan ... 3
1.4 Batasan Masalah ... 4
1.5 Sistematika Penulisan ... 4
BAB II : LANDASAN TEORI 2.1 Perangkat Keras ... 7
2.1.1 Mikrokontroller AT89S51 ... 7
2.1.2 Konstruksi AT89S51 ... 10
2.1.3 Konfigurasi dan Fungsi Kaki Pin AT89S51 ... 13
2.1.5 ADC 0804 ... 16
2.1.6 Karakteristik ADC 0804 ... 20
2.1.7 Prinsip Kerja ADC 0804 ... 21
2.1.8 Pin ADC 0804 ... 24
2.1.9 Sensor Cahaya (Light Defendent Resistor) ... 25
2.1.10 Motor Stepper ... 26
2.2 Perangkat Lunak ……... 33
2.2.1 Software 8051 Editor, Assembler, Simulator (IDE) ... 38
2.2.2 Software Downloader ... 39
BAB III : Rancangan Sistem 3.1 Diagram Blok Rangkaian ... 41
3.2 Perancangan Power Supplay (PSA) ... 42
3.3 Rangkaian Mikrokontroller AT89S51 ... 43
3.4 Rangkaian ADC 0804 ... 44
3.5 Rangkaian Driver Motor Stepper ... 46
3.6 Perancangan Rangkaian Sensor Cahaya (LDR) ... 48
BAB IV : PENGUJIAN RANGKAIAN 4.1 Pengujian Rangkaian Power Supplay (PSA) ... 50
4.2 Pengujian Rangkaian Mikrokontroller AT89S51 ... 50
4.4 Pengujian Rangkaian Driver Motor Stepper ... 53
4.5 Pengujian Sensor Intensitas Cahaya (LDR) ... 56
4.6 Pengujian Alat Secara Keseluruhan ... 57
BAB V : KESIMPULAN DAN SARAN
5.1 Kesimpulan ... 59
5.2 Saran ... 59
DAFTAR GAMBAR
Gambar 2.1 Konfigurasi Pin Mikrokontroller AT89S51 ... 13
Gambar 2.2 Skematik ADC 0804 ... 23
Gambar 2.3 ADC 0804 ... 24
Gambar 2.4 Sensor Cahaya (Light Defender Resistor) ... 25
Gambar 2.5 Variable Reluctance ... 28
Gambar 2.6 Konstruksi Motor Stepper Bipolar ... 30
Gambar 2.7 Konstruksi Motor Stepper Unipolar ... 30
Gambar 2.8 Software 8051 Editor, Assembler, Simulator ... 39
Gambar 2.9 ISP-Flash Programer ... 40
Gambar 3.1 Diagram Blok ... 41
Gambar 3.2 Rangkaian Power Supplay (PSA) ... 42
Gambar 3.3 Rangkaian Mikrokontroller AT89S51 ... 43
Gambar 3.4 Rangkaian ADC ... 45
Gambar 3.5 Rangkaian Motor Stepper ... 46
DAFTAR TABEL
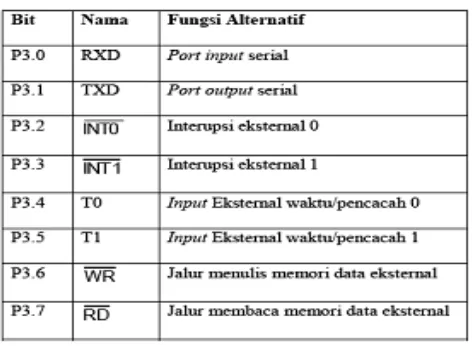
Tabel 2.1 Fungsi Kaki Pin Port 3 AT89S51 ... 14
ABSTRAK
Kajian ini merupakan pembahasan mengenai perancangan sistem
pengendalian intensitas cahaya pada rumah kaca. Sistem pengendalian alat
intensitas cahaya pada rumah kaca ini dilengkapi menggunakan mikrokontroler
AT89S51 dan Sensor cahaya LDR (Light Defendent Resistor). Dimana
mikrokontroller AT89S51 berfungsi sebagai pengendali semua sistem sedangkan
LDR digunakan untuk mendeteksi intensitas cahaya pada lingkungan sekitarnya.
Ketika sensor LDR menerima sedikit cahaya maka atap akan tertutup dan jika
atap terbuka kembali saat LDR mendapat cahaya yang cukup terang. Adapun
untuk menggerakkan atap pada rumah kaca digunakan Motor Stepper. Motor
stepper dikendalikan oleh Driver Motor Stepper. Dalam sistem ini digunakan voltage devider sebagai pembagi tegangan dan relay sebagai saklar. LDR sebagai
input akan memberikan nilai yang berubah-ubah ke ADC yang terdapat pada
BAB I
PENDAHULUAN
1.1. Latar Belakang
Sistem pengendalian merupakan hal yang penting di bidang teknologi dan
industri. Pengendalian secara manual sudah tidak lagi efisien karena akan
membutuhkan waktu. Oleh karena itu diperlukan sistem pengendalian secara
otomatis.
Pengukuran, pemantauan dan tampilan nilai Intensitas Cahaya adalah bagian
yang sering dibutuhkan dilingkungan, dalam suatu sistem elektronik, maupun
industri serta merupakan salah satu kunci penting dalam dunia pertanian atau
perkebunan. Namun pembutan alat ini dilatar belakangi karena sensor LDR
merupakan salah satu sistem yang penting untuk membangun sebuah Alat
Intensitas Cahaya, yang akan memantau dan mengendalikan Intensitas Cahaya pada suatu ruangan tertentu serta memberikan informasi kepada pemakainya.
Rumah kaca (Green house) adalah bangunan di mana tanaman dibudidayakan.
rumah kaca terbuat dari gelas atau plastik. Rumah kaca dapat menjadi panas
karena radiasi elektromagnetik yang datang dari matahari dan memanaskan
tumbuhan, tanah, dan barang lainnya di dalam bangunan ini. Rumah kaca
melindungi tanaman dari panas dan dingin yang berlebihan, melindungi tanaman
dari badai debu dan menolong mencegah hama. Pengontrolan Intensitas Cahaya
membudidayakan tanaman yang memiliki nilai jual yang tinggi seperti tanaman
hias dan buah-buahan.
Sinar matahari yang tersedia dalam jumlah yang cukup besar tersebut tidak
dapat dimanfaatkan secara terus menerus. Karena adakalanya sinar matahari tidak
ada karena faktor alam dan cuaca, karena mendung atau hujan misalnya. Hal ini
tentu menjadi permasalahan dan dapat menggangu proses fotosintesis tanaman
yang dibudidayakan pada rumah kaca. Selain itu, rumah kaca pada umumnya
tidak dilengkapi perangkat yang dapat mengatasi hal tersebut. Karena rumah kaca
pada umumnya tidak dilengkapi peralatan yang dapat mensuplai kebutuhan suhu.
Untuk itu diperlukannya perangkat tambahan pada rumah kaca yang dapat
mengendalikan Intensitas Cahaya. Dengan memanfaatkan mikrokontroler ini
dapat diciptakan suatu alat secerdas komputer tetapi dengan biaya yang relatife
lebih murah daripada komputer. Ketika sensor LDR menerima sedikit cahaya
maka atap akan tertutup dan jika atap terbuka kembali saat LDR mendapat cahaya
yang cukup terang. Adapun untuk menggerakkan atap pada rumah kaca
digunakan Motor Stepper. Motor stepper dikendalikan oleh Driver Motor Stepper.
Dalam sistem ini digunakan voltage devider sebagai pembagi tegangan dan relay
sebagai saklar. LDR sebagai input akan memberikan nilai yang berubah-ubah ke
ADC yang terdapat pada mikrokontroller AT89S51 sesuai dengan intensitas
cahaya yang diterimanya.
Dengan adanya perangkat pengaturan Intensitas Cahaya pada rumah kaca ini
diharapkan akan memaksimalkan pemanfaatan rumah kaca sebagai media untuk
yang baik serta menghasilkan produksi yang baik pula dan kita juga tidak
direpotkan oleh pergantian cuaca.
1.2. Rumusan Masalah
Berdasarkan uraian di atas, dapat dirumuskan beberapa masalah yang dibahas dalam tugas akhir ini , yaitu:
1. Program apa yang diberikan untuk dapat membuka atau menutup atap secara
otomatis.
2. Mikrokontroler AT89S51 berfungsi untuk mengolah data dari sensor LDR.
3. Motor Stepper akan bekerja apabila sensor LDR menerima sedikit cahaya
maka atap akan tertutup dan jika atap terbuka kembali saat LDR mendapat
cahaya yang cukup terang.
4. Bagaimana cara kerja ADC (Analog to Digital Converter) 0804 yang
berfungsi untuk mengubah besaran analog menjadi besaran digital.
1.3. Tujuan Penulisan
Adapun tujuan dari penulisan tugas akhir ini adalah sebagai berikut:
1. Untuk memenuhi salah satu syarat dalam menyelesaikan studi program studi
DIII Fisika di Fakultas MIPA Universitas Sumatera Utara.
2. Dalam pengembangan merancang suatu alat instrumentasi cerdas alat untuk
membuka dan menutup atap pada miniatur rumah kaca sehingga dapat
dikendalikan secara otomatis, efektif dan efisien.
3. Memahami bagaimana cara mengintegrasikan program dalam sebuah sistem
mikroprosesor terpadu untuk menghasilkan sebuah alat yang sederhana dan
4. Memanfaatkan sensor LDR sebagai alat mendeteksi intensitas cahaya, ADC
0804 sebagai pengubah data analog dari sensor LDR menjadi data digital serta
motor stepper untuk membuka dan menutup atap.
1.4. Batasan Masalah
Mengingat keterbatasan kemampuan penulis dan waktu pelaksanaan
pembuatan tugas akhir, maka dibuat batasan masalah sebagai berikut :
1. Mikrokontroler yang digunakan adalah jenis AT89S51.
2. Sensor Intensitas Cahaya yang digunakan sensor LDR.
3. Untuk membuka dan menutup atap ruangan digunakan motor stepper dengan
memanfaatkan sinar cahaya matahari.
1.5. Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat
sistematika pembahasan bagaimana sebenarnya prinsip kerja sistem pengaturan
BAB I. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan
masalah, tujuan penulisan, batasan masalah, serta sistematika
penulisan.
BAB II. LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung
yang digunakan untuk pembahasan dan cara kerja dari rangkaian
Teori pendukung itu antara lain tentang mikrokontroller AT89S51
(hardware dan software), bahasa program yang digunakan. serta
karekteristik dari komponen-komponen pendukung.
BAB III. PERANCANGAN ALAT
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram
blok dari rangkaian, skematik dari masing-masing rangkaian.
BAB IV. PENGUJIAN RANGKAIAN
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem
kerja alat, penjelasan mengenai program-program yang digunakan
untuk mengaktifkan rangkaian, dan diagram alir dari program yang
akan diisikan ke mikrokontroller AT89S51.
BAB V. KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan
yang dilakukan dari tugas akhir ini serta saran apakah yang
dikembangkan perakitannya pada suatu metode lain yang
BAB II
LANDASAN TEORI
2.1. Perangkat Keras
Dalam merancang sebuah peralatan yang cerdas, diperlukan suatu perangkat
keras (hardware) yang dapat mengolah data, menghitung, mengingat dan
mengambil pilihan. Mikrokontroler merupakan salah satu jawabannya. Vendor
dari mikrokontroller ini ada beberapa macam, diantaranya yang paling terkenal
adalah AT89S51. Selain mengunakan mikrokontroller juga digunakan LDR
sebagai sensor cahaya dan ADC sebagai pengkonversi besaran analog menjadi
besaran digital. Selain itu juga terdapat beberapa perangkat seperti :
Mikrokontroller AT89S51, ADC 0804, Sensor LDR, Motor stepper dan Driver
motor stepper.
2.1.1. Mikrokontroller AT89S51
Mikrokontroller adalah gabungan dari sebuah mikroprosesor dan
periperalnya, seperti RAM,ROM (EPROM atau EEPROM) antar muka serial dan
paralel, timer dan rangkaian pengontrol interupsi yang terkait dalam satu IC.
Semuanya membentuk suatu sistem komputer yang lengkap. Perbedaannya
dengan komputer adalah mikrokontroller didesain dengan komponen-komponen
yang minimum dan dipakai untuk orientasi kontrol. Programnya tidak berukuran
besar dan disimpan dalam ROM. Akibat perbedaan aplikasinya dengan
berbeda dengan mikroprosesor. Tidak seperti sistem komputer, yang mampu
menangani berbagai macam program aplikasi (misalnya pengolahan kata,
pengolahan angka dan lain sebagainya), mikrokontroller hanya bisa digunakan
untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan
RAM dan ROM-nya. Pada sistem komputer RAM dan ROM-nya besar.
Sedangkan pada mikrokontroller ROM dan RAM-nya terbatas.
Mikroprosesor biasanya mempunyai set instruksi yang sangat lengkap,
sedangkan mikrokontroller mempunyai set instruksi yang lebih sederhana,
terutama dipakai untuk mengontrol antar muka input dan output yang
menggunakan bit tunggal (singgel bit). Mikrokontroller mempunyai banyak
instruksi untuk set dan clear bit secara individual dan melakukan operasi yang
berorientasi 1 bit untuk logika AND, OR, XOR, loncatan (jumping), percabangan
(brancing) dan lain-lain. Set instruksi seperti ini jarang ada pada mikroprosesor
yang biasanya untuk operasi pada byte atau unit data yang lebih besar.
Adapun kelebihan dari mikrokontroller adalah sebagai berikut :
1. Penggerak pada mikrokontoller menggunakan bahasa pemograman assembly
dengan berpatokan pada kaidah digital dasar sehingga pengoperasian sistem
menjadi sangat mudah dikerjakan sesuai dengan logika sistem (bahasa
assembly ini mudah dimengerti karena menggunakan bahasa assembly aplikasi dimana parameter input dan output langsung bisa diakses tanpa menggunakan
banyak perintah). Desain bahasa assembly ini tidak menggunakan begitu
banyak syarat penulisan bahasa pemrograman seperti huruf besar dan huruf
2. Mikrokontroller tersusun dalam satu chip dimana prosesor, memori, dan I/O
terintegrasi menjadi satu kesatuan kontrol sistem sehingga mikrokontroller
dapat dikatakan sebagai komputer mini yang dapat bekerja secara inovatif
sesuai dengan kebutuhan sistem.
3. Sistem running bersifat berdiri sendiri tanpa tergantung dengan komputer
sedangkan parameter komputer hanya digunakan untuk download perintah
instruksi atau program. Langkah-langkah untuk download komputer dengan
mikrokontroller sangat mudah digunakan karena tidak menggunakan banyak
perintah.
4. Pada mikrokontroller tersedia fasilitas tambahan untuk pengembangan
memori dan I/O yang disesuaikan dengan kebutuhan sistem.
5. Harga untuk memperoleh alat ini lebih murah dan mudah didapat.
6. Mikrokontroller AT89S51 adalah standart International.
AT89S51 merupakan keluaran atmel dengan 4 Kbyte Flash PEROM
(Programmable and Erasable Read Only Memory). Isi memori tersebut dapat diisi ulang ataupun dihapus berkali-kali. AT89S51 merupakan memori dengan
teknologi non-volatile memory (data tidak hilang walaupun catu daya dimatikan).
Memori ini biasa digunakan untuk menyimpan instruksi berstandar MCS-51 code
sehingga memungkinkan mikrokontroller ini bekerja dalam mode single chip
operation (mode operasi keping tunggal) yang tidak memerlukan external memory (memori luar) untuk menyimpan source code tersebut.
Beberapa fasilitas yang dimiliki oleh mikrokontroller AT89S51 adalah
sebagai berikut :
b. Osilatc : internal dan rangkaian pewaktu
c. RAM internal 128 byte
d. Flash memori 4 Kbyte
e. Lima buah jalur interupsi (dua buah interupsi eksternal dan tiga buah
interupsi internal)
f. Empat buah programable port I/0 yang masing-masing terdiri dari delapan
buah jalur I/0
g. Sebuah port serial dengan kontrol serial full duplex UART
h. Kemampuan untuk melaksanakan operasi aritmatika dan operasi logika
i. Kecepatan dalam melaksanakan instruksi per siklus 1 mikrodetik pada
frekuensi.
2.1.2. Konstruksi AT89S51
Mikrokontroller AT89S51 hanya memerlukan tambahan 3 kapasitor, 1
resistor dan 1 kristal serta catu daya 5 volt. Kapasitor 10 micro-farad dan resistor
10 kilo Ohm dipakai untuk membentuk rangkaian riset. Dengan adanya rangkaian
riset ini AT89S51 otomatis diriset begitu rangkaian menerima catu daya. Kristal
dengan frekuensi maksimum 12 MHz dan kapasitor 30 piko-farad dipakai untuk
melengkapi rangkaian oscilator pembentuk clock yang menentukan kecepatan
kerja Microcontroller.
Memori merupakan bagian yang sangat penting pada Mikrokontroller.
1. Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dengan keperluannya, dalam susunan MCS-51
memori penyimpanan program ini dinamakan sebagai memori program.
2. Random Access Memory (RAM) isinya akan sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat program bekerja. RAM yang
dipakai untuk menyimpan data ini disebut sebagai memori data.
Ada berbagai jenis ROM. Untuk Mikrokontroller dengan program yang
sudah baku dan diproduksi secara massal, program diisikan kedalam ROM pada
saat IC Mikrokontroller dicetak dipabrik IC. Untuk keperluan tertentu
Mikrokontroller menggunakan ROM yang dapat diisi ulang atau
Programble-Eraseable ROM yang disingkat menjadi PROM (PEROM). Dulu banyak
UV-EPROM (Ultra Violet Eraseable Programble ROM) yang kemudian dinilai mahal
dan ditinggalkan setelah ada flash PEROM yang harganya jauh lebih murah. Flash PEROM adalah Memori yang digunakan untuk menyimpan instruksi-instruksi
MCS51. Flash PEROM dialamati oleh Program Address Register. AT89S51
mempunyai 4Kb Flash PEROM, yaitu ROM yang dapat ditulis ulang atau dihapus
menggunakan sebuah perangkat programmer, yang mempunyai kemampuan
untuk ditulis ulang hingga 1000 kali. Program yang ada pada Flash PEROM akan
dijalankan pada saat sistem di-reset, pin EA/VP berlogika 1 sehingga
mikrokontroller aktif berdasarkan program yang ada pada Flash PEROM-nya.
Namun jika pin EA/VP berlogika 0, mikrokontroller aktif berdasarkan program
Jenis memori yang dipakai untuk memori program AT89S51 adalah flash
PEROM, program untuk mengendalikan Mikrokontroller diisikan ke memori itu
lewat bantuan alat yang dinamakan sebagai AT89S51 flash PEROM Programmer.
Memori data yang disediakan dalam chip AT89S51 sebesar 128 kilo byte
meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu
sudah cukup. Sarana Input/Output yang disediakan cukup banyak dan bervariasi.
AT89S51 mempunyai 32 jalur Input/Output paralel dikenal sebagai Port 1 (P1.0
… P1.7) dan Port 3 (P3.0 … P3.7).
AT89S51 dilengkapi UART (Universal Asyncronous Receiver
/Transmiter) yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk
komunikasi data seri (RXD dan TXD) diletakkan berhimpitan dengan P1.0 dan
P1.1. pada kaki nomor 2 dan 3, sehingga kalau sarana input/output bekerja
menurut fungsi waktu. Clock penggerak untaian pencacah ini bisa berasal dari
oscillator kristal atau clock yang diumpan dari luar lewat T0 dan T1/T0 dan T1
berhimpitan dengan P3.4 dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai
untuk jalur input/output paralel kalau T0 dan T1 dipakai.
AT89S51 mempunyai enam sumber pembangkit interupsi, dua diantaranya
adalah sinyal interupsi yang diumpankan ke kaki INT0 dan INT1. Kedua kaki ini
berhimpitan dangan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur
input/output paralel kalau INT0 dan INT1 dipakai untuk menerima sinyal
interupsi.
Port1 dan 2, UART, Timer 0, Timer 1 dan sarana lainnya merupakan yang
secara fisik merupakan RAM khusus, yang ditempatkan di Special Function
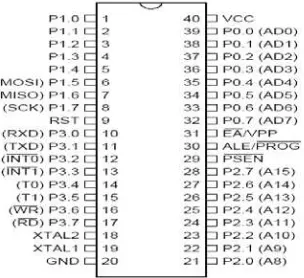
2.1.3. Konfigurasi dan Fungsi Kaki Pin AT89S51
Mikrokontroller AT89S51 mempunyai 40 kaki, 32 kaki diantaranya adalah
kaki untuk keperluan Port paralel. Satu Port paralel terdiri dari 8 kaki, dengan
demikian 32 kaki tersebut membentuk 4 buah Port paralel. Berikut adalah gambar
konfigurasi pin mikrokontroller AT89S51 seperti pada gambar 2.1. :
Gambar 2.1. Konfigurasi Pin Mikrokontroler AT89S51
Pada Gambar 2.1. terlihat bahwa AT89S51 mempunyai 4 buah port
paralel, yang masing-masing dikenal dengan Port 0, Port 1, Port 2, dan Port 3.
Nomor dari masing-masing jalur (kaki) dari Port paralel mulai dari 0 sampai 7,
jalur pertama Port 0 disebut sebagai P0.0 dan jalur terakhir untuk Port 3 adalah
P3.7.
Susunan pena – pena mikrokontroller AT89S51 dapat dijelaskan sebagai
berikut :
1. Pin 1 sampai 8 (Port 1) merupakan port pararel 8 bit dua arah (bidirectional) yang dapat digunakan untuk berbagai keperluan (general purpose).
2. Pin 9 merupakan pin reset, reset aktif jika mendapat catuan tinggi.
3. Pin 10 sampai 17 (Port 3) gambar 2.1 port pararel 8 bit dua arah yang
Tabel 2.1. Fungsi Pengganti
4. Pin 18 sebagai XTAL 2, keluaran osilator yang terhubung pada kristal.
5. Pin 19 sebagai XTAL 1, masukan ke osilator berpenguatan tinggi, terhubung
pada kristal.
6. Pin 20 sebagai Vss, terhubung ke 0 atau ground pada rangkaian.
7. Pin 21 sampai 28 (Port 2) adalah port pararel 8 bit dua arah. Port ini mengirim
byte alamat bila pengaksesan dilakukan pada memori eksternal.
8. Pin 29 sebagai PSEN (Program Store Enable) adalah sinyal yang digunakan
untuk membaca, memindahkan program memori eksternal (ROM / EPROM)
ke mikrokontroler (aktif low).
9. Pin 30 sebagai ALE (Address Latch Enable) untuk menahan alamat bawah
selama mengakses memori eksternal. Pin ini juga berfungsi sebagai PROG
(aktif low) yang diaktifkan saat memprogram internal flash memori pada
mikrokontroler (on chip).
10.Pin 31 sebagai EA (External Accesss) untuk memilih memori yang akan
eksternal (EA = Vss), juga berfungsi sebagai Vpp (programming supply voltage) pada saat memprogram internal flash memori pada mikrokontroler.
11.Pin 32 sampai 39 (Port 0) merupakan port pararel 8 bit dua arah. Berfungsi
sebagai alamat bawah yang dimultipleks dengan data untuk mengakses
program dan data memori eksternal.
12.Pin 40 sebagai Vcc, terhubung ke +5 V sebagai catuan untuk mikrokontroler.
2.1.4. Antarmuka Serial AT89S51
Pada port serial AT89S51 penerimaan dan pengiriman data port serial
melalui register SBUF. Penulisan ke SBUF berarti mengisi register pengiriman ke
SBUF, sedangkan pembacaan dari SBUF berarti membaca register penerimaan
SBUF. Port serial pada AT89S51 bisa digunakan dalam 4 mode kerja yang
berbeda, terdiri dari 1 mode bekerja secara sinkron dan 3 lainnya bekerja secara
asinkron.
Adapun mode kerja dari port serial, antara lain yaitu :
1. Mode 0 : Mode ini bekerja secara sinkron, data serial dikirim dan diterima melalui kaki P3.0 (Rxd), sedangkan kaki P3.1 (Txd) digunakan untuk
menyalurkan detak pendorong data serial yang dibangkitkan oleh AT89S51.
Data dikirim dan diterima 8 bit sekaligus dimulai dari bit LSB dan diakhiri
dengan bit MSB. Kecepatan boud rate 1/12 frekuensi kristal yang digunakan. 2. Mode 1 : Pada mode ini data dikirim melalui kaki P3.1 (Txd) dan diterima
melalui kaki P3.0 (Rxd) secara asinkron (juga mode 2 dan 3). Pada mode 1
Pada AT89S51/52 yang berfungsi sebagai penerima bit stop adalah RB8
dalam register SCON. Kecepatan boud rate bisa diatur sesuai dengan
keperluan dengan menggunakan timer. Mode 2 dan 3 yang umum dikenal
dengan UART.
3. Mode 2 : Data dikirim atau diterima 11 bit sekaligus, diawali dengan 1 bit
start, disusul 8 bit data, kemudian bit ke 9 yang bisa diatur lebih lanjut,
diakhiri dengan 1 bit stop. Pada AT89S51/52 yang berfungsi sebagai
pengirim, bit 9 tersebut berasal dari bit TB8 dalam register SCON dan yang
berfungsi sebagai penerima, bit 9 ditampung pada bit RB8 dalam register
SCON, sedangkan bit stop diabaikan tidak ditampung. Boud rate bisa dipilih antara 1/32 atau 1/64 frekuensi kristal yang digunakan.
4. Mode 3 : Mode ini sama dengan mode 2 hanya saja boud rate-nya bisa diatur sesuai dengan keperluan seperti mode1.
2.1.5. ADC 0804
Analog digital converter (ADC) adalah perangkat untuk menkonversi
sinyal masukan dalam bentuk tegangan analog menjadi sinyal keluaran dalam
bentuk digital. Dimana output yang dihasilkan ADC sebanding dengan input yang
diberikan. Proses pengubahan ini dikenal juga dengan nama sistem akusisi data.
Umumnya ADC digunakan sebagai perantara antara sensor yang kebanyakan
analog dengan sistim komputer seperti sensor suhu, cahaya, tekanan atau berat,
aliran dan sebagainya kemudian diukur dengan menggunakan sistim digital
(komputer). Hal-hal yang juga perlu diperhatikan dalam penggunaan ADC adalah
pengkondisi sinyal, resolusi, pewaktu eksternal ADC, tipe keluaran, ketepatan dan
waktu konversinya.
Menurut cara pengkonversiannya, ADC dapat dikelompokkan dalam
beberapa jenis yaitu:
1. Tipe integrating
Tipe integrating menawarkan resolusi tertinggi dengan biaya terendah.
ADC tipe ini tidak dibutuhkan rangkaian sample hold. Tipe ini memiliki
kelemahan yaitu waktu konversi yang agak lama, biasanya beberapa milidetik.
2. Tipe tracking
Tipe tracking menggunakan prinsip up down counter (pencacah naik dan
pencacah turun). Fungsinya adalah Binary counter (pencacah biner) akan
mendapat masukan clock secara kontinyu dan hitungan akan bertambah atau
berkurang tergantung pada kontrol dari pencacah apakah sedang naik (up
counter) atau sedang turun (down counter). ADC tipe ini tidak
menguntungkan jika dipakai pada sistem yang memerlukan rangkaian sample
hold.
ADC tipe ini sangat tergantung pada kecepatan clock pencacah, semakin
tinggi nilai clock yang digunakan, maka proses konversi akan semakin
singkat.
3. Tipe flash/ paralel
Tipe ini dapat menunjukkan konversi secara lengkap pada kecepatan 100
MHz dengan rangkaian kerja sederhana. Sederetan tahanan mengatur masukan
inverting dari tiap-tiap konverter menuju tegangan yang lebih tinggi dari
range, komparator dengan bias di bawah Vin akan mempunyai keluaran rendah.
Keluaran komparator ini tidak dalam bentuk biner murni. Suatu dekoder
dibutuhkan untuk membentuk suatu keluaran yang biner. Beberapa
komparator berkecepatan tinggi, dengan waktu tunda (delay) kurang dari 6 ns banyak digunakan karena itu dihasilkan kecepatan konversi yang sangat
tinggi. Jumlah komparator yang dibutuhkan untuk suatu konversi n bit adalah
2n-1.
4. Tipe successive approximation
Tipe successive approximation merupakan suatu konverter yang paling
sering ditemukan dalam dasar perangkat keras yang menggunakan ADC. Tipe
ini memiliki kecepatan konversi cukup tinggi meskipun dari segi harga relatif
mahal. Prinsip kerja konverter tipe ini adalah dengan membangkitkan
pertanyaan yang pada intinya berupa tebakan nilai digital terhadap nilai
tegangan analog yang dikonversikan. Apabila resolusi ADC ini adalah 2n
maka diperlukan maksimal n kali tebakan.
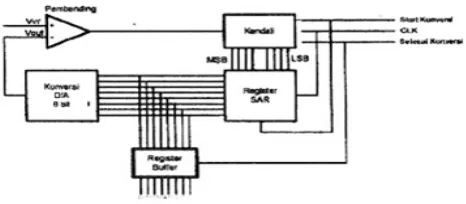
Komparator digunakan untuk membandingkan keluaran D/A dengan
masukan analog Vin. Keluaran komparator digunakan untuk mencek register
pendekatan berurutan (Successive Approximation Register – SAR). Setelah
menerima pulsa mulai konversi, SAR akan mengeluarkan bit-bit untuk diubah
menjadi tegangan analog oleh suatu pengubah D/A, mula SAR akan
mengaktifkan MSB, yang akan menghasilkan suatu tegangan analog pada
keluaran pengubah D/A. tegangan ini dibandingkan dengan Vin. Bila V1 <
Pada contoh kita V1 < Vin sehingga MSB dibuat “1”. Selanjutnya bit no 2
diaktifkan dibuat 1 dan keluaran pengubah D/A yang baru dibandingkan lagi
dengan Vin . pada contoh V2 < Vin sehingga bit no 2 dibuat juga 1. kemudian
bit no 3 dibuat 1. terakhir bit no 4 (LSB) dibuat “1”. Akan tetapi V4 > Vin,
maka bit no 4 dibuat 0. keadaan akhir pada keluaran SAR adalah (1110)2
menyatakan keluaran digital untuk Vin.
Jenis ADC yang biasa digunakan dalam perancangan adalah jenis
successive approximation convertion (SAR) atau pendekatan bertingkat yang memiliki waktu konversi jauh lebih singkat Pemilihan ADC umumnya
ditentukan oleh metode yang digunakan untuk konversi data, sedangkan
Rentang tegangan masukan analog maksimum adalah watak untai ADC yang
digunakan sehingga masukan analog yang akan dimasukkan ke ADC tersebut
terlebih dahulu harus disesuaikan dengan tegangan analog maksimal yang
diizinkan. Resolusi ADC berkaitan dengan cacah bit dan rentang tegangan
pada masukan analog.
Dengan pertimbangan diatas penulis sengaja memilih ADC 0804 sebagai
Konverter A/D . ADC 0804 adalah suatu IC CMOS pengubah analog ke
digital 8-bit dengan satu kanal masukan. Jumlah bit yang dihasilkan, didapat
dari hasil pengkonversian tegangan yang biasanya besar tegangan tersebut
antara 0 volt sampai dengan +5 volt. Dengan demikian, apabila kita
memasukan sebuah tegangan antara 0 volt sampai dengan 5 volt pada sebuah
ADC 8 bit maka setelah proses konversi akan menghasilkan sebuah kombinasi
bilangan biner yang ditunjukkan dengan bilangan biner antara 0 sampai
ADC ini relatif cepat dan mempunyai ukuran kecil. Keuntungan tambahan
adalah setiap sampling diubah dalam selang waktu yang sama tidak tergantung
pada arus masukan dan secara keseluruhan ditentukan oleh frekuensi yang
mengandalkan clock dan resolusi dari pengubah. Kekurangan pengubah jenis
ini adalah mempunyai kekebalan rendah terhadap noise dan diperlukan adanya
pengubah digital ke analog yang tepat dan pembanding dengan unjuk kerja
yang tinggi.
2.1.6. Karakteristik IC ADC 0804
IC ADC 0804 adalah sebuah piranti yang dirancang untuk mengubah
sinyal-sinyal analog menjadi sinyal-sinyal digital. IC ADC 0804 dianggap dapat
memenuhi kebutuhan dari rangkaian yang akan dibuat. IC jenis ini bekerja secara
cermat dengan menambahakan sedikit komponen sesuai dengan spesifikasi yang
harus diberikan dan dapat mengkonversikan secara tepat masukan tegangan.
ADC bayank tersedia dipasaran Beberapa karakteristik dari ADC 0804
adalah sebagai berikut :
1. Memiliki 2 masukan analog yaitu Vin (+) dan Vin (-) sehingga
memperbolehkan masukan selisih (diferensial). Dengan kata lain, tegangan
masukan analog yang sebenarnya adalah selisih dari masukan kedua pin
{analog Vin = Vin (+) – Vin (-)}. Jika hanya satu masukan, maka Vin
dihubungkan ke ground. Pada operasi normal, ADC menggunakan Vcc =+5
sebagai tegangan refrensi dan masukan analog memiliki dari 0 sampai 5V
2. Mengubah tegangan analog menjadi keluaran digital 8 bit. Sehingga
resolusinya adalah 5V/255 = 19,6 mV
3. Memiliki pembangkit detak (clock) internal yang menghasilkan frekuensi
F=1/(1,1RC), dengan R dan C adalah komponen eksternal.
4. Memiliki koneksi ground yang berbeda antara tegangan digital dan analog.
Kaki 8 adalah ground analog. Kaki 10 adalah ground digital.
2.1.7. Prinsip Kerja ADC 0804
Ada banyak cara yang dapat digunakan untuk mengubah sinyal analog
menjadi sinyal digital yang nilainya proposional. Secara singkat prinsip kerja dari
konverter A/D adalah semua bit-bit diset deretan data biner bit mulai dari MSB
dan diakhiri dengan LSB. Selama proses perhitungan biner, register akan
memonitor output komparator untuk melihat jika perhitungan biner kurang atau
lebih besar dari input analog kemudian diuji, dan bilamana perlu sesuai dengan
kondisi yang telah ditentukan. Dengan rangkaian yang paling cepat, konversi akan
diselesaikan sesudah 8 clock, dan keluaran D/A merupakan nilai analog yang
ekivalen dengan nilai register SAR. Apabila konversi telah dilaksanakan,
rangkaian kembali mengirim sinyal selesai konversi yang berlogika rendah. Sisi
turun sinyal ini akan menghasilkan data digital yang ekivalen ke dalam register
buffer. Dengan demikian, keluaran digital akan tetap tersimpan sekalipun akan di
mulai siklus konversi yang baru.
IC ADC 0804 mempunyai dua masukan analog, Vin (+) dan Vin (-),
sehingga dapat menerima masukan diferensial. Masukan analog sebenarnya (Vin)
pin masukan yaitu Vin= Vin (+) – Vin (-). Kalau masukan analog berupa tegangan
tunggal, tegangan ini harus dihubungkan dengan Vin (+), sedangkan Vin (-)
digroundkan. Untuk operasi normal, ADC 0804 menggunakan Vcc = +5 Volt
sebagai tegangan referensi. Dalam hal ini jangkauan masukan analog mulai dari 0
Volt sampai 5 Volt (skala penuh), karena IC ini adalah SAC 8-bit, resolusinya
akan sama dengan :
... (2.1)
(n) menyatakan jumlah bit keluaran biner IC analog to digital converter) IC ADC
0804 memiliki generator clock intenal yang harus diaktifkan dengan
menghubungkan sebuah resistor eksternal (R) antara pin CLK OUT dan CLK IN
serta sebuah kapasitor eksternal (C) antara CLK IN dan ground digital. Frekuensi
clock yang diperoleh di pin CLK OUT sama dengan :
... (2.2)
Untuk sinyal clock ini dapat juga digunakan sinyal eksternal yang dihubungkan ke
pin CLK IN. ADC 0804 memilik 8 keluaran digital sehingga dapat langsung
dihubungkan dengan saluran data mikrokomputer. Masukan (chip select, aktif
Gambar 2.2. Skematik ADC 0804
Pada ADC 0804 ini, terdapat dua jenis prinsip didalam melakukan
konversi, yaitu free running dan mode control. Pada mode free running, ADC
akan mengeluarkan data hasil pembacaan input secara otomatis dan berkelanjutan
(continue). Pada mode ini pin INTR akan berlogika rendah setelah ADC selesai
melakukan konversi, logika ini dihubungkan kepada masukan WR untuk
memerintahkan ADC memulai konversi kembali. Prinsip yang kedua yaitu mode
control, pada mode ini ADC baru akan memulai konversi setelah diberi instruksi dari mikrokontroler. Instruksi ini dilakukan dengan memberikan pulsa rendah
kepada masukan WR sesaat +1ms, kemudian membaca keluaran data ADC
setelah keluaran INTR berlogika rendah. Pada penelitian ini, prinsip konversi
yang digunakan adalah mode control.
Secara umum Rangkaian di dalam IC ADC memiliki 2 bagian utama, yaitu:
a. Bagian Sampling dan Hold, yang berfungsi menangkap atau menahan
tagangan analog input sesaat untuk seterusnya diumpankan ke rangkaian
pengonversi.
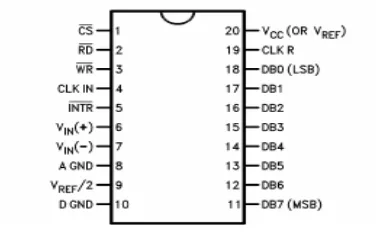
2.1.8. Pin Pada ADC 0804
Pin pada ADC 0804 seperti pada gambar 2.3 :
Gambar 2.3. ADC 0804
Fungsinya sebagai berikut :
1. Pin WR (Write), pulsa high pada input write maka ADC akan melakukan
konversi data, tegangan analog menjadi data digital. Pin WR dihubungkan
dengan pin INTR. Setelah selesai konversi pin INTR akan memberi pulsa low
pada pin WR.
2. Pin INTR (Interrupt), bila konversi data analog menjadi digital telah selesai
maka pin INTR akan mengeluarkan pulsa low ke pin WR. Perangkat ADC
dapat diopersikan dalam mode free running dengan menghubungkan pin INT
ke input WR.
3. Pin CS (Chip select), agar ADC dapat aktif , melakukan konversi data maka
input chip select harus diberi logika low. Data output akan berada pada
kondisi three state apabila CS mendapat logika high.
4. Pin RD (Read), agar data ADC data dapat dibaca oleh sistem mikroprosessor
5. Pin Vin (+) dan Vin (-) merupakan input tegangan deferensial yang akan
mengambil nilai selisih dari kedua input. Dengan memanfaatkaninput Vin
maka dapat dilakukan offset tegangan nol pada ADC.
6. Pin Vref, tegangan referensi dapat diatur sesuai dengan input tegangn pada
Vin (+) dan Vin (-), Vref = Vin / 2.
Vresolusi = Vin max / 255.
7. Pin CLOCK, clock untuk ADC dapat diturunkan pada clock CPU atau RC
eksternal dapat ditambahkan untuk memberikan generator clock dari dalam
CLK In menggunakan schmitt triger.
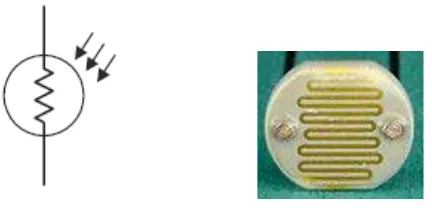
2.1.9. Sensor Cahaya (Light Defendent Resistor)
LDR (Light Dependent Resistor) merupakan suatu resistor yang nilai
hambatannya tergantung pada intensitas cahaya. Tampilan fisik dan simbol LDR
dapat dilihat pada gambar 2.4 :
Gambar 2.4. Sensor Cahaya (Light Defender Resistor)
Biasanya LDR (atau lebih dikenal dengan fotoresistor) dibuat berdasarkan
kenyataan bahwa film kadmium sulfida mempunyai tahanan yang besar kalau
terkena sinar. Resistor peka cahaya atau fotoresistor adalah komponen elektronik
yang resistansinya akan menurun jika ada penambahan intensitas cahaya yang
mengenainya. Fotoresistor dapat merujuk pula pada light dependent resistor
(LDR), atau fotokonduktor.
Fotoresistor dibuat dari semikonduktor beresistansi tinggi. Jika cahaya
yang mengenainya memiliki frekuensi yang cukup tinggi, foton yang diserap oleh
semikonduktor akan menyebabkan elektron memiliki energi yang cukup untuk
meloncat ke pita konduksi. Elektron bebas yang dihasilkan (dan pasangan
lubangnya) akan mengalirkan listrik, sehingga menurunkan resistansinya.
Besarnya tahanan LDR / fotoresistor dalam kegelapan mencapai jutaan ohm dan
turun sampai beberapa ratus ohm dalam keadaan terang. LDR dapat digunakan
dalam suatu jaringan kerja (network) pembagi potensial yang menyebabkan
terjadinya perubahan tegangan kalau sinar yang datang berubah. LDR digunakan
untuk mendeteksi intensitas cahaya, yang mana intensitas cahaya sendiri
dinyatakan dalam dua satuan fisika, yaitu lumens per meter persegi dan Watt per
meter persegi. Kedua satuan itu agak berbeda. yang satu berdasarkan pada
kepekaan mata manusia, yang satu lagi berdasarkan energi listrik yang dialirkan
ke sumber cahaya.
2.1.10.Motor Stepper
Motor stepper adalah motor listrik yang dikendalikan dengan pulsa-pulsa
digital, bukan dengan memberikan tegangan yang terus-menerus. Deretan pulsa
diterjemahkan menjadi putaran shaft, dimana setiap putaran membutuhkan
atau step, yang merupakan bagian dari satu putaran penuh. Oleh karena itu,
perhitungan jumlah pulsa dapat diterapkan untuk mendapatkan jumlah putaran
yang diinginkan. Perhitungan pulsa secara otomatis menujukkan besarnya putaran
yang telah dilakukan, tanpa memerlukan informasi balik(feedback).
Ketepatan kontrol gerak motor stepper terutama dipengaruhi oleh jumlah
step tiap putaran; semakin banyak jumlah step, semakin tepat gerak yang
dihasilkan. Untuk ketepatan yang lebih tinggi, beberapa driver motor stepper
membagi step normal menjadi setengah step(half step) atau mikro step. Pada
motor stepper umumnya tertulis spesifikasi Np (= pulsa / rotasi). Sedangkan
kecepatan pulsa diekspresikan sebagai pps (= pulsa per second) dan kecepatan
putar umumnya ditulis sebagai ω (= rotasi / menit atau rpm). Kecepatan putar
motor stepper (rpm) dapat diekspresikan menggunakan kecepatan pulsa (pps)
sebagai berikut.
... (2.3)
Oleh karena 1 rotasi = 360°, maka tingkat ketelitian motor stepper dapat
diekspresikan dalam rumus sebagai berikut.
Variable Reluctance (VR) motor stepper jenis ini memiliki bentuk rotor
yang unik yaitu berbentuk silinder dan pada semua unitnya memiliki gerigi yang
memiliki hubungan dengan kutub-kutub stator. Rotor pada magnet tipe ini tidak
menggunakan magnet permanent. Stator terlilit oleh lilitan sehingga pada saat
teraliri arus, stator akan menghasilkan kutub magnet. Jumlah gerigi pada rotor
akan menentukan langkah atau step motor. Perbedaan motor stepper berjenis PM
dengan VR yaitu motor berjenis VR memiliki torsi yang relatif lebih kecil
dibanding dengan motor stepper berjenis PM. Hal lain yang dapat dilihat adalah
sisa kemagnetan sangat kecil sehingga pada saat motor stepper tidak dialiri arus
maka ketika diputar tidak ada torsi yang melawan. Sudut langkah motor stepper
berjenis VR ini bervariasi yaitu sekitar sampai dengan 30°. Motor stepper berjenis
VR ini memiliki torsi yang kecil. Sering ditemukan pada printer dan
instrumen-instrumen pabrik yang ringan yang tidak membutuhkan torsi yang besar variabel
Reluctance pada gambar 2.5 :
Gambar 2.5. Variable Reluctance
Seperti pada gambar diatas, motor mempunyai 3 pasang kutub stator (A,
B, C) yang diset terpisah 15 derajat. Arus dialirkan ke kutub A melalui lilitan
motor yang menyebabkan tarikan magnetik yang menyejajarkan gigi rotor
berputar 15 derajat sejajar kutub B. Proses ini akan berlanjut kekutub C dan
kembali kekutub A searah dengan jarum jam.
Pada dasarnya prinsip kerja motor stepper sama dengan motor DC, yaitu
membangkitkan medan magnet untuk memperoleh gaya tarik ataupun gaya tolak
menolak dengan menggunakan catu tegangan DC pada lilitan/kumparannya.
Motor stepper menggunakan gaya tarik untuk menarik fisik kutub magnet yang
berlawanan sedekat mungkin ke posisi kutub magnet yang dihasilkan oleh
kumparan.
Dilihat dari lilitannya motor stepper terbagi menjadi 2 jenis yaitu :
a. Motor Stepper Bipolar
Motor stepper bipolar memiliki empat kabel masukan. Namun untuk
menggerakan motor stepper tipe ini lebih rumit jika dibandingkan dengan
menggerakan motor stepper tipe unipolar. Sebagai gambaran dapat dilihat
konstruksi motor stepper bipolar pada gambar 2.6 :
Gambar 2.6. Konstruksi Motor Stepper Bipolar
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang
berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal
negatif dan sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang lebih
kompleks daripada rangkaian pengendali untuk motor unipolar.
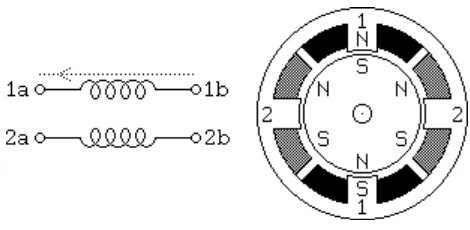
b. Motor Stepper Unipolar
Motor stepper unipolar terdiri dari dua lilitan yang memiliki center tap. Center
tap dari masing masing lilitan ada yang berupa kabel terpisah sudah terhubung
didalamnya sehingga center tap yang keluar hanya satu kabel. Center tap dari
motor stepper dapat dihubungkan ke ground atau dapat juga yang
menghubungkannya ke +Vcc, tergantung pada driver yang digunakan. Sebagai
gambaran dapat dilihat konstruksi motor stepper unipolar pada gambar 2.7 :
Gambar 2.7. Konstruksi Motor Stepper Unipolar
Rangkaian pengendali motor stepper unipolar lebih mudah dirancang
karena hanya memerlukan satu switch pada setiap lilitannya. Agar motor ini
berputar, tegangan positif diberikan pada terminal center tap, kemudian tegangan
positif diberikan secara bergantian dan berurutan terus- menerus pada keempat
terminal masing-masing lilitan. Oleh karena itu, pada alat ini digunakan motor
stepper jenis unipolar.
Pada motor stepper ini, suplai tegangan yang dibutuhkan adalah V = 12
3600/1,80= 200 step (Np). Kecepatan pulsa diekspresikan sebagai pps (= pulsa per
second) dan kecepatan putar umumnya ditulis sebagai ω (= rotasi / menit atau
rpm). Kecepatan putar motor stepper (rpm) dapat dihitung menggunakan rumus
pada kecepatan pulsa (pps) sebagai berikut.
[
rotasi menit]
Dengan : Np = step/putaran (pulsa/rotasi)
pps = pulsa per detik
Torsi yang dapat dihasilkan oleh motor stepper dapat dihitung berdasarkan
perbandingan daya kerja motor terhadap kecepatan putarannya. Atau dapat
dirumuskan sebagai berikut:
ω τ = P
... (2. 7)
dengan P adalah daya kerja motor dalam satuan watt dan ω adalah kecepatan
perputaran motor dalam satuan rotation per minute (rpm).
Untuk mengetahui beban maksimum yang dapat digerakkan motor stepper dapat
r F. =
τ
... (2.8)dengan F adalah gaya berat yang bekerja terhadap motor dan r adalah jarak
sumbu putar pada motor. Gaya berat yang bekerja terhadap motor dapat dituliskan
dengan:
F = m.g (Newton) ... (2.9)
Dengan : m = massa (kg)
g = percepatan gravitasi (m/s2).
Motor stepper dapat diatur posisinya dengan akurat pada posisi tertentu
dan dapat berputar kearah yang diinginkan dengan memberi pulsa-pulsa digital
dengan pola seperti pada table 2.2 dibawah ini. Untuk memutar motor stepper
adalah dengan memberi pulsa ke koil secara berurutan dari koil 1 ke koil 2, dan
seterusnya. Arah putaran motor stepper tergantung urutan pulsa yang diberikan ke
koil, apabila diinginkan putaran dengan arah yang berlawanan, maka urutan pulsa
yang dimasukkan ke koil juga bergeser berlawanan arah jarum jam. Dari gambar
2.7 diperoleh tabel 2.2 :
Putaran Searah jarum jam Berlawanan arah jarum jam
koil 1 koil 2 koil 3 koil 4 koil 1 koil 2 koil 3 koil 4
step 1 1 0 0 0 0 0 0 1
step 2 0 1 0 0 0 0 1 0
step 3 0 0 1 0 0 1 0 0
step 4 0 0 0 1 1 0 0 0
Pada tabel 2.2 diatas, ‘1’ diartikan bahwa lilitan yang bersangkutan
dilewati arus sehingga menghasilkan gaya tolak untuk rotor, sedangkan ‘0’
diartikan lilitan dalam kondisi off, yakni tidak mendapatkan arus. Pada tabel juga ditunjukkan, untuk membalik putaran motor stepper cukup membalik urutan
pemberian pulsa pada lilitan. Untuk memperlambat atau mempercepat putaran
motor stepper, dengan mengatur waktu urutan pemberian pulsa, akan tetapi,
pemberian waktu pulsa jika terlalu lamban akan menyebabkan motor stepper
bergetar dan jika terlalu cepat akan mengakibatkan motor tidak mau berputar.
2.2. Perangkat Lunak
Bahasa yang digunakan untuk memprogram IC mikrokontroller AT89S51
adalah bahasa assembly untuk MCS-51 merupakan jumlah instruksi, pada bahasa
ini hanya ada 51 instruksi. Dari instruksi, yang sering digunakan orang hanya 10
instruksi, instruksi tersebut adalah :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register
tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Contoh pengisian nilai secara langsung
MOV R0,#20h
Perintah diatas berarti : isikan nilai 20 heksadesimal ke register 0 (R0). Tanda
# sebelum bilangan menunjukkan bahwa bilangan tersebut adalah nilai.
MOV 20h,#80h
…………
…………
MOV R0,20h
Perintah diatas berarti : isikan nilai yang terdapat pada alamat 20
heksadesimal ke register 0 (R0).
Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah
alamat.
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk
mengurangi nilai register tertentu dengan 1 dan lompat jika hasil
pengurangannya belum nol.
Contoh ,
MOV R0,#80h
Loop: …………
…………
DJNZ R0,Loop
R0 -1, jika belum 0 lompat ke loop, jika R0 = 0 maka program akan
meneruskan ke perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memangggil suatu rutin tertentu.
Contoh :
…………
ACALL TUNDA
…………
TUNDA :
…………
4. Instruksi RET
Instruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin
pemanggil setelah instruksi ACALL dilaksanakan.
Contoh :
ACALL TUNDA
…………
TUNDA:
…………
5. Instruksi JMP (JUMP)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu.
Contoh:
Loop:
………
………
JMP Loop
6. Instruksi JB (JUMP IF BIT)
Instruksi ini merupakan perintah untuk melompat ke alamat tertentu, jika pin
yang dimaksud berlogika high (1).
Contoh :
Loop:
JB P1.0,Loop
………
7. Instruksi JNB (JUMP IF NOT BIT)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin
yang dimaksud berlogika low (0).
JNB P1.0,Loop
…………
8. Instruksi CJNE (COMPARE JUMP IF NOT EQUEL)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register
dengan suatu nilai tertentu.
Contoh :
Loop:
………
CJNE R0,#20h,loop
………
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin
Loop.
Jika nilai R0 sama dengan 20h, maka program akan melanjutkan instruksi
selanjutnya.
9. Instruksi DEC (DECREMENT)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang
dimaksud dengan 1. contoh :
……
DEC R0 R0 = R0 – 1
……
10.Instruksi INC (INCREMENT)
Instruksi ini merupakan perintah untuk menambahkan nilai register yang
dimaksud dengan 1.
Contoh:
MOV R0,#20h R0 = 20h
…………
INC R0 R0 = R0 + 1
…………
2.2.1. Software 8051 Editor, Assembler, Simulator (IDE)
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan
pada sebuah editor, yaitu 8051 Editor, Assembler, Simulator seperti pada gambar
Gambar 2.8. Software 8051 Editor, assembler, simulator
Software 8051IDE ini berfungsi untuk merubah program yang kita
tuliskan ke dalam bilangan heksadesimal, dimana proses perubahan ini terjadi
pada saat kita meng-Assemble program tersebut. Bilangan heksadesimal hasil
proses inilah yang dikirim ke mikrokontroller. Kemudian instruksi-instruksi
(program-program) tersebut akan di-save dan kemudian di-Assemble
(di-Compile). Pada saat di-Assemble maka akan tampil pesan peringatan dan
kesalahan. Jika masih ada peringatan tersebut, itu berarti masih ada kesalahan
dalam penulisan instruksi atau ada nama subrutin yang sama. sehingga harus
diperbaiki terlebih dahulu sampai tidak ada pesan kesalahan lagi.
2.2.2. Software Downloader
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke
mikrokontroller digunakan software ISP-Flash Programer yang dapat di download
Gambar 2.9. ISP-Flash Programer
Cara menggunakannya adalah dengan meng klik open file untuk mengambil
file heksadesimal dari hasil kompilasi 8051 IDE, kemudian klik write untuk
BAB III
RANCANGAN SISTEM
3.1. Diagram Blok Rangkaian
Diagram blok merupakan gambaran dasar dari rangkaian sistem yang akan dirancang. Setiap diagram blok mempunyai fungsi masing-masing. Adapun
diagram blok dari sistem yang dirancang adalah seperti yang diperlihatkan pada
diagram blok seperti gambar 3.1 :
Gambar 3.1. Diagram Blok Rangkaian
Disain sistem rangkaian terdiri dari:
1. Sensor LDR berfungsi untuk mendeteksi ada tidaknya cahaya sinar matahari
kemudian output sensor ini akan diinputkan ke ADC 0804.
2. ADC 0804 berfungsi untuk merubah tegangan analog dari sensor LDR
menjadi data digital 8 bit, sehingga data tersebut dapat diolah oleh
mikrokontroler AT89S51.
3. Mikrokontroler AT89S51 berfungsi untuk mengolah data digital yang
dikirimkan oleh ADC 0804, selanjutnya mikrokontroller akan menggerakkan
motor stepper.
Sensor ADC Mikrokontroller AT89S51
Motor Driver Motor
Vreg
4. Sensor hanya melihat kondisi terang (atap terbuka) dan kondisi gelap (atap
tertutup), untuk menggerakkan atap ruangan digunakan motor stepper.
3.2. Perancangan Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan
12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh
rangkaian, sedangkan keluaran 12 volt digunakan untuk mensuplay tegangan ke
relay. Rangkaian power supplay ditunjukkan pada gambar 3.2 :
Gambar 3.2. Rangkaian Power Supplay (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan
tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan
disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan
diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT)
digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan
pada tegangan masukannya. LED hanya sebagai indikator apabila PSA
apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan
(LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar.
Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
3.3. Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh system yang ada. Kompoen utama dari rangkaian ini adalah IC mikrokontroler AT89S51. Pada IC
inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan
yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar 3.3 :
Gambar 3.3. Rangkaian Mikrokontroller AT89S51
Mikrokontroler ini memiliki 32 port I/O, yaitu port 0, port 1, port 2 dan
port 3. Pin 32 sampai 39 adalah Port 0 yang merupakan saluran/bus I/O 8 bit. Pin
adalah port 3 Pin 40 dihubungkan ke sumber tegangan 5 volt. Dan pin 20
dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen
kristal 12 MHz sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi
kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
Pada pin 9 dihubungkan dengan sebuah kapasitor 10 uF yang dihubungkan
ke positip dan sebuah resistor 10 Kohm yang dihubungkan ke ground. Kedua
komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa
saat setelah power aktip. Lamanya waktu antara aktipnya power pada IC
mikrokontroler dan aktipnya program adalah sebesar perkalian antara kapasitor
dan resistor tersebut. Jika dihitung maka lama waktunya adalah :
10 10 1 det
t=R x C= KΩ x µF = m ik ... (3.1)
Jadi 1 mili detik setelah power aktip pada IC kemudian program aktip.
3.4. Rangkaian ADC
Rangkaian ADC ini berfungsi untuk merubah data analog yang dihasilkan
oleh LDR menjadi bilangan digital. output dari ADC dihubungkan ke
mikrokontroler. Sehingga mikrokontroler dapat mendeteksi tingkat intensitas
cahaya di dalam ruangan Dengan demikian proses pengukuran suhu dan
pengaturan tingkat pencayaan dapat dilakukan. Gambar rangkaian ADC
Gambar.3.4 Rangkaian ADC
Input ADC dihubungkan LDR, sehingga setiap perubahan tegangan pada
LDR akan dideteksi oleh ADC. Agar output yang dihasilkan oleh ADC bagus,
maka tegangan refrensi ADC harus benar-benar stabil, karena perubahan
tegangan refrensi pada ADC akan merubah output ADC tersebut. Oleh sebab itu
pada rangkaian ADC di atas tegangan masukan 12 volt dimasukkan ke dalam IC
regulator tegangan 9 volt ( 7809) agar keluarannya menjadi 9 volt, kemudian
keluaran 9 volt ini dimasukkan kedalam regulator tegangan 5 volt (7805),
sehingga keluarannya menjadi 5 volt. Tegangan 5 volt inilah yang menjadi
tegangan refrensi ADC.
Dengan demikian walaupun tegangan masukan turun setengahnya, yaitu
dari 12 volt menjadi 6 volt, tegangan refrensi ADC tetap 5 volt.
Output dari ADC dihubungkan ke mikrokontroler, sehingga setiap perubahan
output ADC yang disebabkan oleh perubahan inputnya akan diketahui oleh
mikrokontoller.
3.5. Rangkaian Driver Motor Stepper
Agar intensitas cahaya yang masuk ke dalam ruangan dapat di atur sesuai
dengan keinginan kita maka dibutuhkan suatu rangkaian yang dapat
mengendalikan tingkat intensitas cahaya yang masuk tersebut. Rangkaian ini
digunakan untuk mengendalikan ventilasi sehingga dengan cara menutup dan
membuka ventilasi kita dapat mengendalikan tingkat intensitas cahaya yang
masuk ke dalam ruangan tersebut. Rangkaian ini menggunakan otor stepper dan
driver stepper. Motor stepper berfungsi untuk membuka ventilasi dan driver
stepper berfungsi untuk mengendalikan motor stepper.rangkaian pengendali motor
stepper dapat dilihat pada gambar 3.5 :
Driver ini berfungsi untuk memutar motor stepper searah dengan jarum jam atau
berlawanan arah dengan jarum jam. Rangkaian ini akan dikendalikan oleh
mikrokontroler AT89S51. Jadi dengan memberikan sinyal high secara bergantian
ke input dari rangkaian driver motor stepper tersebut, maka pergerakan motor
stepper sudah dapat dikendalikan oleh mikrokontroler AT89S51.
Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat
keluaran, dimana masing-masing masukan dihubungkan dengan mikrokontroler
AT89S51 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan
bekerja memutar motor stepper jika diberi sinyal high (1) secara bergantian pada
ke-4 masukannya.
Rangkaian ini terdairi dari 4 buah transistor NPN TIP 122. Masing-masing
transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler
AT89S51. Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk
membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan
kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan
dengan sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122
mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan
terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0
volt dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan
12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet.
Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak
aktip dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan
magnet pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga
kumparan yang terhubung ke P0.1 akan menghasilkan medan magnet. Maka
motor akan beralih kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya
jika logika high diberikan secara bergantian pada input dari driver motor stepper,
maka motor stepper akan berputar sesuai dengan arah logika high (1) yang
diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang
sebelumnya, maka logika high (1) pada input driver motor stepper harus
diberikan secara bergantian dengan arah yang berlawanan dengan sebelumnya.
3.6. Perancangan Rangkaian Sensor Cahaya (LDR)
Untuk dapat menggerakkan drive motor steper, maka alat dilengkapi dengan sebuah sensor. Sensor yang digunakan adalah sensor LDR. LDR atau Light
Dipendent Resistor adalah salah satu jenis resistor yang dinilai hambatannya
dipengaruhi oleh cahaya yang diterimanya. LDR dibuat ddari Cadmium Sulfida
yang peka terhadap cahaya. Seperti yang telah diketahui bahwa cahaya memiliki
dua sifat yang berbeda yaitu sebagai gelombang elektromagnetik dan
foton/partikel energi (dualisme cahaya). Saat cahaya menerangi LDR, foton akan
menabrak ikatan cadmium sulfida dan melepaskan elektron yang terlepas dari
ikatan. Sehingga hambatan LDR akan turun saat cahaya meneranginya. LDR akan
(gelap). Dalam kondisi ini hambatan LDR mampu mencapai 1 M ohm akan tetapi
saat terkena cahaya, hambatan LDR akan turun secara drastis, hingga kira-kira
250 ohm.
Tegangan tersebut belum dapat mengaktifkan transistor C945 dengan
demikian tegangan kolektor-emitor berkisar antara 4.5 V -5 V. Teganagan inilah
BAB IV
PENGUJIAN ALAT DAN PROGRAM
4.1. Pengujian Rangkaian Power Supplay (PSA)
Pengujian pada bagian rangkaian power supplay ini dapat dilakukan dengan
mengukur tegangan keluaran dari rangkaian ini dengan menggunakan volt meter
digital. Pada power supplay ini terdapat dua keluaran, yaitu hasil pengujian
tegangan keluaran pertama sebesar + 5,1 volt, tegangan ini dipergunakan untuk
mensupplay tegangan ke seluruh rangkaian. Mikrokontroler AT89S51 dapat
bekerja pada tegangan 4,0 sampai dengan 5,5 volt, sehingga tegangan 5,1 volt ini
cukup untuk mensupplay tegangan ke mikrokontroller AT89S51. Sedangkan hasil
pengujian tegangan keluaran kedua sebesar 11,9 volt, tegangan ini digunakan
untuk mensupplay tegangan ke relay, dimana relay dapat aktip pada tegangan 9
sampai 15 volt, sehingga tegangan ini sudah memenuhi syarat untuk
mengaktipkan relay.
4.2. Pengujian Rangkaian Mikrokontroller AT89S51
Untuk mengetahui apakah rangkaian mikrokontroller AT89S51 telah bekerja
dengan baik, maka dilakukan pengujian.Pengujian bagian ini dilakukan dengan
memberikan program sederhana pada mikrokontroller AT89S51. Programnya
adalah sebagai berikut:
Setb P0.0
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke
P0.0 selama ± 0,13 detik kemudian mematikannya selama ± 0,13 detik secara
terus menerus. Perintah Setb P0.0 akan menjadikan P0.0 berlogika high yang
menyebabkan LED mati. Acall tunda akan menyebabkan LED ini mati selama
beberapa saat. Perintah Clr P0.0 akan menjadikan P0.0 berlogika low yang
menyebabkan LED akan nyala. Perintah Acall tunda akan menyebabkan LED ini
nyala selama beberapa saat. Perintah Sjmp Loop akan menjadikan program
tersebut berulang, sehingga akan tampak LED tersebut tampak berkedip.
Lamanya waktu tunda dapat dihitung dengan perhitungan sebagai berikut :
Kristal yang digunakan adalah kristal 12 MHz, sehingga 1 siklus mesin
membutuhkan waktu = 12 1
12MHz = mikrodetik.
mov r7,#255
Tnd: mov r6,#255
djnz r6,$ 255 x 2 = 510 x 255 = 131.070 = 131.073
djnz r7,loop3
ret
Jadi waktu yang dibutuhkan untuk mengerjakan program di atas adalah
131.073 μdetik atau 0,131073 detik dan dapat dibulatkan menjadi 0,13 detik.
Jika program tersebut diisikan ke mikrokontroller AT89S51, kemudian
mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka
rangkaian minimum mikrokontroller AT89S51 telah bekerja dengan baik.
4.3. Pengujian Rangkaian ADC
Pengujian pada bagian rangkaian ADC ini dapat dilakukan dengan
menghubungkan rangkaian ADC ini dengan rangkaian mikrokontroler.
Selanjutnya rangkaian mikrokontroler dihubungkan dengan rangkaian display
seven segmen. Mikrokontroler diisi dengan program untuk membaca nilai yang
ada pada rangkaian ADC, kemudian hasil pembacaannya ditampilkan pada
display seven segmen. Programnya adalah sebagai berikut :
div ab
mov 71h,a
mov 72h,b
Dengan program di atas, maka akan tampil nilai intensitas cahaya yang
dideteksi oleh sensor Ldr.
4.4. Pengujian Rangkaian Driver Motor Stepper
Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat
keluaran, dimana masing-masing masukan dihubungkan dengan mikrokontroler
AT89S51 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan
bekerja memutar motor stepper jika diberi sinyal high (1) secara bergantian pada
ke-4 masukannya. Rangkaiannya seperti gambar 4.1 :