PINTU KANAL BANJIR OTOMATIS PADA BENDUNGAN
MENGGUNAKAN MICROKONTROLER AT89S51
SEBAGAI PUSAT KENDALI
TUGAS AKHIR
SYAHPUTRA
062408053
DEPARTEMEN FISIKA
JURUSAN FISIKA INSTRUMENTASI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PINTU KANAL BANJIR OTOMATIS PADA BENDUNGAN
MENGGUNAKAN MICROKONTROLER AT89S51
SEBAGAI PUSAT KENDALI
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh gelar Ahli Madya
SYAHPUTRA
062408053
DEPARTEMEN FISIKA
JURUSAN FISIKA INSTRUMENTASI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
JuduI : PINTU KANAL BANJIR OTOMATIS
PADA BENDUNGAN MENGGUNAKAN
MICROKONTROLER AT89S51 SEBAGAI
PUSAT KENDALI
Kategori : TUGAS AKHIR
Nama : SYAHPUTRA
Nomor Induk Mahasiswa : 062408053
Program Studi : D3 FISIKA INSTRUMENTASI Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMUPENGETAHUAN ALAM (FMIPA)UNIVERSITAS SUMATERA UTARA (USU)
Diluluskan di Medan, Junari 2009
Ketua Program Studi
D3 Fisika Instrumentasi Pembimbing
PERNYATAAN
PINTU KANAL BANJIR OTOMATIS PADA BENDUNGAN
MENGGUNAKAN MICROKONTROLER AT89S51 SEBAGAI
PUSAT KENDALI
TUGAS AKHIR
Saya mengakui bahwa laporan tugas akhir ini adalah hasil kerja saya sendiri,kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Junari 2009
PENGHARGAAN
Puji dan syukur penulis ucapkan kepada Allah Subhanahuwata’ala,sang penguasa langit dan bumi dan apa yang ada diantara keduanya.Yang senantiasa melimpahkan karunianya dan selalu memberikan kemudahan dan kelancaran sehingga penulis dapat menyelesaikan penulisan tugas akhir ini sesuai waktu yang telah ditetapkan.Sholawat dan salam semoga senantiasa tercurahkan kepada Rasululullah
Sallallhu’alaihiwasalam sang pembawa petunjuk dan selalu menjadi inspirasi dan
teladan bagi penulis.
Pada kesempatan kali ini penulis ingin mengucapkan ucapan terima kasih kepada Dekan dan Pembantu Dekan FMIPA USU,ketua departemen Fisika Bapak DR.Marhaposan Sitomorang,Ketua Jurusan Departemen DIII Fisika Instrumentasi Bapak Drs.Syahrul Humaidi,M.Sc.Sekretaris Jurusan Departemen Fisika Ibu Dra.Yustinon,M.Si.Dan khusus kepada Bapak Drs.Syahrul Humaidi,M.Sc. selaku Dosen Pembimbing penulis dalam penulisan dan penyusunan tugas akhir ini yang telah banyak membantu dan memberikan kepercayaan kepada penulis untuk dapat menyelesaikan tugas akhir ini.Serta kepada seluruh dan Dosen pengajar di Deprtemen Fisika FMIPA USU yang telah banyak membantu penulis selama menempuh pendidikan di bangku perkuliahan.
Tak lupa penulis memberikan penghargaan dan penghormatan kepada kedua orang tua dan seluruh keluarga yang selalu memberikan dukungan dan doa kepada penulis sehingga penulis termovitasi untuk dapat menyelesaikan tugas akhir ini.Juga kepada teman-teman atas segala bantuan dan segala bantuan dan kerja sama semoga Allah membalasnya dengan pahala terbaik. kepada seluruh teman-teman di jurusan Fisika Instrumentasi yang selalu memotivasi penulis agar segera mungkin menyelesaikan penulisan dan penyusunan tugas akhir ini serta kepada seluruh teman-teman seperjuangan lainnya yang tidak mungkin penulis sebutkan disini.Semoga Allah Subhanahuwata’ala melimpahkan kesejahteraan dan keselamatan kepada kalian semua.
ABSTRAK
Kajian ini merupakan pembahasan mengenai pengendalian pintu kanal banjir pada bendungan secara otomatis. Untuk mendeteksi tingginya volume air akan digunakan beberapa utas kabel yang kemudian disebuat sebagai sensor air. Motor stepper pengaturan atap dan suhu ruangan pada rumah.Untuk melakukan pengaturan suhu digunakan untuk penggerak pintu kanal. Pemilihan motor stepper sebagai penggerak karena besar sudut pergerakan motor ini dapat di ukur dengan cukup mudah dibanding dengan jenis motor penggerak lain
Sensor yang dipasang sebagai umpan balik (feedback) dalam system akan mengindra nilai ketinggian level atau volume air secara terus - menerus (real time). Hasil tersebut sebelum dikirimkan kepada mikrokontroler untuk diolah.
DAFTAR ISI
1.3 Maksud danTujuan Penulisan 3
1.4 Batasan Masalah 3
1.5 Sistematika Penulisan 3
BAB 2 LANDASAN TEORI 5
2.1 Prinsip kerja pembuka/penutup pintu 5
2.2 Sensor air sedehana 6
2.3 Mikrokontroler AT89S51 7
2.3.1 Kontruksi AT89S51 9
2.3.2 Pin-Pin pada Microcontroller AT89S51 11
BAB 3 PERANCANGAN ALAT 26
3.1 Diagram Blok Rangkaian 26
3.2 Perancangan Power Supply (PSA) 28
3.3 Perancangan Rangkaian Mikrokontroler AT89S51 29
3.4 Rangkaian sensor air sederhana 31
3.5 Perancangan Rangkaian Driver Motor Stepper 32
3.6 Diagram Alir Program 33
BAB 4 PENGUJIAN ALAT DAN PROGRAM 35
4.1 Pengujian Rangkaian Power Supplay (PSA) 35
4.2Pengujian Rangkaian minimum AT89S51 36
4.3 Pengujian Rangkaian Driver Motor Stepper 39
BAB 5 KESIMPULAN DAN SARAN 43
5.1 Kesimpulan 43
5.2 Saran 44
DAFTAR PUSTAKA 45
DAFTAR TABEL
Halaman
DAFTARGAMBAR
Halaman
Gambar 2.1 Diagram Blok Sistem pembuka/penutup pintu 5
Gambar 2.2 IC Mikrokontroler AT89S51 11
Gambar 2.3 (a) bentuk pulsa keluaran dari driver motor stepper
(b) penerapan pulsa driver pada motor stepper dan arah putaran yang bersesuaian 14 Gambar 2.4 bentuk gelombang keluaran rangkaian pembangkit pulsa 15 Gambar 2.5 Software 8051 Editor, Assembler, Simulator 24
Gambar 2.6 ISP- Flash Programmer 25
Gambar 3.1 Diagram Blok Sistem pembuka/penutup pintu 26
Gambar 3.2 Rangkaian Power Supplay (PSA) 28
Gambar 3.3 Rangkaian mikrokontroller AT89S51 29
Gambar 3.4 Rangkaian sensor air sederhana 31
Gambar 3.5 Rangkaian Driver Motor Stepper 32
Gambar 3.6 Diagram Alir Program 34
Gambar 4.1 Rangkaian Power Supplay (PSA) 35
Gambar 4.2 Rangkaian minimum AT89S51 37
ABSTRAK
Kajian ini merupakan pembahasan mengenai pengendalian pintu kanal banjir pada bendungan secara otomatis. Untuk mendeteksi tingginya volume air akan digunakan beberapa utas kabel yang kemudian disebuat sebagai sensor air. Motor stepper pengaturan atap dan suhu ruangan pada rumah.Untuk melakukan pengaturan suhu digunakan untuk penggerak pintu kanal. Pemilihan motor stepper sebagai penggerak karena besar sudut pergerakan motor ini dapat di ukur dengan cukup mudah dibanding dengan jenis motor penggerak lain
Sensor yang dipasang sebagai umpan balik (feedback) dalam system akan mengindra nilai ketinggian level atau volume air secara terus - menerus (real time). Hasil tersebut sebelum dikirimkan kepada mikrokontroler untuk diolah.
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Air adalah sumber kehidupan, tampa air tak satupun mahluk hidup di bumi ini dapat bertahan, Namun air juga bisa menjadi bencana yang dapat membahayakan mahluk hidup seperti air bah atau banjir. Oleh sebab itu kita harus dapat mengendalikan jumlah debit air yang ada pada lingkungan kita. Salah satu cara pengendalian debit air adalah dengan membuat bendungan atau waduk, pada bendungan atau waduk tentunya terdapat pintu kanal banjir yang harus dibuka dan tutup sesuai dengan keadaan volume air yang ada pada bendungan itu. Alangkah baiknya apabila pengendalian pintu kanal banjir pada bendungan atau waduk bekerja secara otomatis kerena perubahan volume air yang selalu berubah ubah dalam periode waktu yang taidak menentu.
Alat ini bekerja berdasarkan ketinggian level air yang dideteksi oleh sensor air. Lebarnya pembukaan pintu air akan disesuaikan dengan tingginya level air yang telah dicapai, pintu kanal banjir akan semakin lebar terbuka apa bila level ketinggian aiar semakin ringgi.
dapat di deteksi dan alat ini dapat langsung melakukan tindakan untuk penegdalian volume air tersebut. Tentunya faktor kelalaian yang sering terjadi pada manusiapun dapat dihindari, seringnya penjaga pintu kanal banjir lalai dalam mengendalikan pintu kanal banjir menyebapkan volume air yang tidak stabil, akibatnya sering terjadi kerusakan pada lingkungan. Dengan alat ini maka pengendalian volume air akan semakin mudah dan stabil.
1.2. Rumusan Masalah
Berdasarkan uraian yang terdapat dalam latar belakang di atas, maka dalam laporan Tugas akhir ini akan dibuat sebuah prototipe pengendali pintu kanal banjir pada bendungan yang dapat dibuka dengan menggunakan motor penggerak. Alat ini juga menggunaan sensor level air sebagai acuan seberapa lebar pintu kanal bajir akan dibuka.
1.3 Tujuan Penulisan
Adapun tujuan dari penulisan tugas akhir ini adalah sebagai berikut: 1. Memahami prinsip kerja sensor air sederhana.
2. Memahami prinsip kerja Mikrokontroller AT89S51 sebagai tempat pemprosesan data dari pemancar ke penerima.
3. Memahami prinsip kerja dari Motor stepper sebagai motor penggerak pintu.
1.4 Batasan Masalah
Penulisan Laporan Tugas Akhir ini dibatasi pada:
1. Studi cara kerja rangkaian penerima yang meliputi diagram blok dan menguraikan secara umum fungsi dari masing-masing komponen utama dalam blok tersebut.
2. Mikrokontroler yang digunakan yaitu AT89S51, jadi hanya mikrokontroler ini yang akan diuaraikan cara kerjanya dan cara pemogramannya.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari rangkaian penerima, maka penulis menulis laporan ini sebagai berikut:
BAB 1. PENDAHULUAN
BAB 2. LANDASAN TEORI SISTEM PENERIMA
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian.Teori pendukung itu antara lain tentang mikrokontroler AT89S51 (hardware dan software), bahasa program yang digunakan, serta cara kerja dari rangkaian penerima.
BAB 3. PERANCANGAN ALAT DAN PROGRAM
Dalam bab ini meliputi perancangan rangkaian pengendali motor stepper dan sensor air sederhana.
BAB 4. PENGUJIAN DAN ANALISA RANGKAIAN
Pada bab ini akan dibahas hasil analisa dari rangkian pengendali motor stepper.
BAB 5. KESIMPULAN DAN SARAN
BAB 2
LANDASAN TEORI
PINTU KANAL BANJIR OTOMATIS PADA
BENDUNGAN
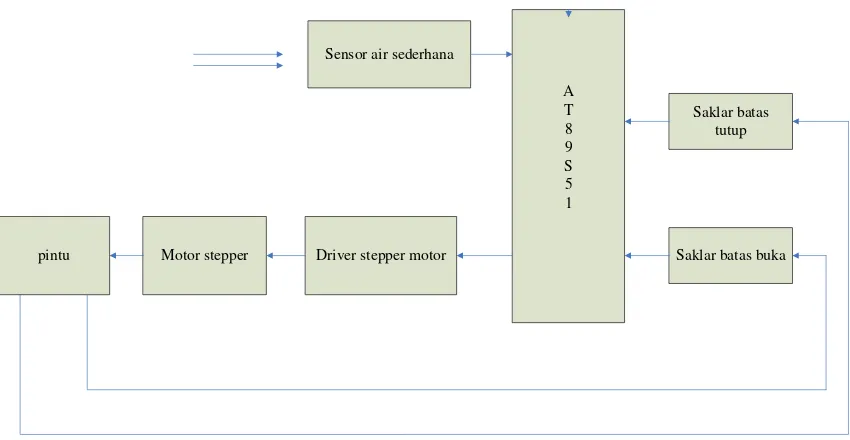
2.1 Prinsip kerja pembuka/penutup pintu
Dalam membuat suatu alat ada beberapa hal yang perlu di perhatikan yaitu bagaimana cara merancang alat yang akan di buat sesuai dasar teori. Sebelum merancang suatu sistem atau rangkaian terlebih dahulu membuat blok diagramnya.
pintu Motor stepper Driver stepper motor
A T 8 9 S 5 1
Saklar batas tutup
Saklar batas buka Sensor air sederhana
Diagram blok merupakan salah satu cara yang paling sederhana untuk menjelaskan cara kerja dari suatu sistem dan memudahkan untuk melokalisir kesalahan dari suatu sistem.
Dengan diagram blok kita dapat menganalisa cara kerja rangkian dan merancang hardware yang akan dibuat secara umum. Diagram merupakan pernyataan hubungan yang berurutan dari suatu atau lebih komponen yang memiliki kesatuan kerja tersendiri, dan setiap blok komponen mempengaruhi komponen lainya.
Diagram blok memiliki arti yang khusus dengan memberikan keterangan di dalamnya. Untuk setiap blok di hubungkan dengan sutatu garis yang menunjukkan arah kerja dari setiap blok yang bersangkutan.
2.2 Sensor air sedehana
Sensor air sederhana dapat dibuat scara langsung yaitu,hanya dengan menggunakan dua utas kabel. Sifat air yang dapat menghantar arus listrik dengan baik menbuat kita dapat mendeteksi adanya air yang telah menyentu sensor.
2.3 Mikrokontroler AT89S51
Mikrokontroller sebagai suatu terobosan teknologi mikrokontroler dan microkomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi baru, yaitu teknologi semi konduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah (dibandingkan microprocessor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat bantu dan mainan yang lebih canggi serta dalam bidang pendidikan.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka, dan lain sebagainya), Microcontroller hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan RAM dan ROM-nya. Pada sistem komputer perbandingan RAM dan ROM-nya besar, artinya program-program pengguna disimpan dalam ruang RAM yang relatif besar, sedangkan rutin-rutin antar muka perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan Pada mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program control disimpan dalam ROM yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat penyimpanan sederhana sementara, termasuk register-register yang digunakan pada Microcontroller yang bersangkutan.
Pada prinsipnya program pada Microcontroller dijalankan bertahap, jadi pada program itu sendiri terdapat beberapa set instruksi dan tiap instruksi itu dijalankan secara bertahap atau berurutan.
Beberapa fasilitas yang dimiliki oleh microcontroller AT89S51 adalah sebagai berikut :
Sebuah Central Processing Unit 8 bit
Osilatc : internal dan rangkaian pewaktu RAM internal 128 byte
Flash memori 4 Kbyte
Lima buah jalur interupsi (dua buah interupsi eksternal dan tiga buah interupsi internal)
Empat buah programable port I/O yang masing-masing terdiri dari delapan buah jalur I/O
Sebuah port serial dengan kontrol serial full duplex UART
Kemampuan untuk melaksanakan operasi aritmatika dan operasi logika
2.3.1 Kontruksi AT89S51
Mikrokontroller AT89S51 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1 kristal serta catu daya 5 volt. Kapasitor 10 micro-fard dan resistor 10 kilo Ohm dipakai untuk membentuk rangkaian riset. Dengan adanya rangkaian riset ini AT89C4051 otomatis diriset begitu rangkaian menerima catu daya. Kristal dengan frekuensi maksimum 24MHz dan kapasitor 30 mikro-farad dipakai untuk melengkapi rangkaian oscilator pembentuk clock yang menentukan kecepatan kerja Microcontroller. Memori merupakan bagian yang sangat penting pada Microcontroller. Microcontroller memiliki dua macam memori yang sifatnya berbeda.
Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dengan keperluannya, dalam susunan MCS-51 memori penyimpanan program ini dinamakan sebagai memori program. Ada berbagai jenis ROM. Untuk Microcontroller dengan program yang sudah baku dan diproduksi secara massal, program diisikan kedalam ROM pada saat IC Microcontroller dicetak dipabrik IC. Untuk keperluan tertentu Microcontroller menggunakan ROM yang dapat diisi ulang atau Programble-Eraseable ROM yang disingkat menjadi PROM (PEROM). Dulu banyak UV-EPROM (Ultra Violet Eraseable Programble ROM) yang kemudian dinilai mahal dan ditinggalkan setelah ada flash PEROM yang harganya jauh lebih murah.
Jenis memori yang dipakai untuk memori program AT89S51 adalah flash PEROM, program untuk mengendalikan Microcontroller diisikan ke memori itu lewat bantuan alat yang dinamakan sebagai AT89C4051 flash PEROM Programmer. Memori data yang disediakan dalam chip AT89S51 sebesar 128 kilo byte meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu sudah cukup.
AT89S51 dilengkapi UART (Universal Asyncronous Receiver/Transmiter) yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk komunikasi data seri (RXD dan TXD) diletakkan berhimpitan dengan P1.0 dan P1.1. pada kaki nomor 2 dan 3, sehingga kalau sarana input/output bekerja menurut fungsi waktu. Clock penggerak untaian pencacah ini bisa berasal dari oscillator kristal atau clock yang diumpan dari luar lewat T0 dan T1/T0 dan T1 berhimpitan dengan P3.4 dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur input/output paralel kalau T0 dan T1 dipakai.
AT89S51 mempunyai enam sumber pembangkit interupsi, dua diantaranya adalah sinyal interupsi yang diumpankan ke kaki INT0 dan INT1. Kedua kaki ini berhimpitan dangan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur input/output paralel kalau INT0 dan INT1 dipakai untuk menerima sinyal interupsi.
Port1 dan 2, UART, Timer 0, Timer 1 dan sarana lainnya merupakan yang secara fisik merupakan RAM khusus, yang ditempatkan di Special Function Register
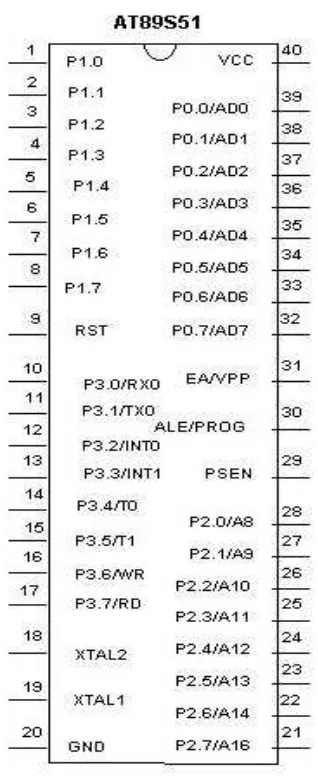
2.3.2 Pin-Pin pada Microcontroller AT89S51
Deskripsi pin-pin pada Microcontroller AT89S51 :
Gambar 2.2 IC Mikrokontroler AT89S51
VCC (Pin 40)
Suplai tegangan
GND (Pin 20 )
Ground
Port 0 dapat berfungsi sebagai I/O biasa, low order multiplex address/data ataupun penerima kode byte pada saat flash progamming Pada fungsi sebagai I/O biasa port ini dapat memberikan output sink ke delapan buah TTL input atau dapat diubah sebagai input dengan memberikan logika 1 pada port tersebut.
Pada fungsi sebagai low order multiplex address/data, por ini akan mempunyai internal pull up.
Pada saat flash progamming diperlukan eksternal pull up, terutama pada saat verifikasi program.
4. Port 2 (Pin 21 – pin 28)
Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengaksememori secara 16 bit. Pada saat mengakses memori 8 bit, port ini akan mengeluarkan isi dari P2 special function register. Port ini mempunyai internal pull up dan berfungsi sebagai input dengan memberikan logika 1. Sebagai output, port ini dapat memberikan output sink keempat buah input TTL.
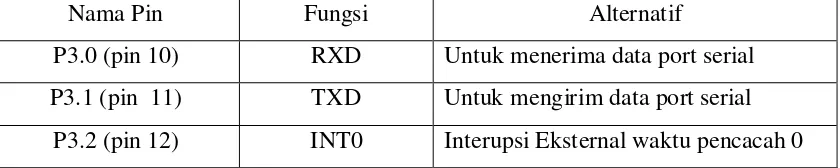
5. Port 3 (Pin 10 – pin 17)
Port 3 merupakan 8 bit port I/O dua arah dengan internal pullup. Port 3 juga mempunyai fungsi pin masing-masing, yaitu sebagai berikut :
Tabel 2.1 Fungsi Masing-masing Pin pada Port 3 Mikrokontroler
Nama Pin Fungsi Alternatif
P3.0 (pin 10) RXD Untuk menerima data port serial P3.1 (pin 11) TXD Untuk mengirim data port serial
P3.3 (pin 13) INT1 Interupsi Eksternal waktu pencacah 1 P3.4 (pin 14) T0 Input Eksternal waktu pencacah 0 P3.5 (pin 15) T1 Input Eksternal waktu pencacah 1 P3.6 (pin 16) WR Jalur menulis memori data eksternal P3.7 (pin 17 ) RD Jalur membaca memori data eksternal
6. RST (pin 9)
Reset akan aktif dengan memberikan input high selama 2 cycle. 7. ALE/PROG (pin 30)
Address latch Enable adalah pulsa output untuk me-latch byte bawah dari alamat selama mengakses memori eksternal. Selain itu, sebagai pulsa input progam (PROG) selama memprogam Flash.
8. SEN (pin 29)
Progam store enable digunakan untuk mengakses memori progam eksternal 9. EA (pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan progam yang ada pada memori eksternal setelah sistem direset. Jika kondisi high, pin ini akan berfungsi untuk menjalankan progam yang ada pada memori internal. Pada saat flash progamming, pin ini akan mendapat tegangan 12 Volt.
10. XTAL1 (pin 19)
Input untuk clock internal 11. XTAL2 (pin 18)
2.4 Driver Motor stepper
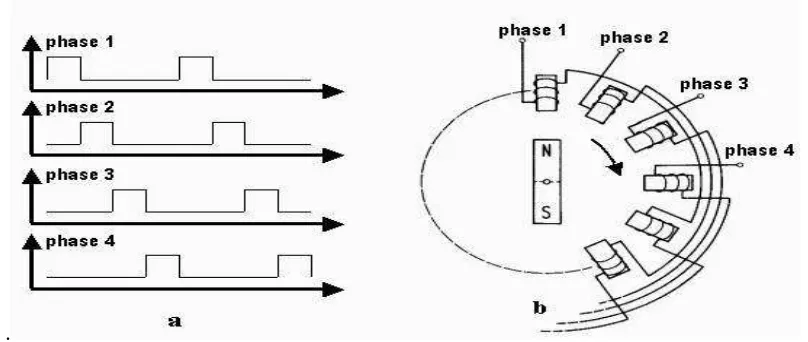
Motor stepper yang digunakan pada contoh ini bertipe hibrid unipolar, memiliki empat fasa dan panjang langkah sebesar 1,80 per langkahi. Motor diharapkan dapat berputar dalam dua arah dan memiliki dua kecepatan. Karena itu diperlukan pengendali motor stepper yang memiliki empat keluaran pulsa dengan kemampuan dua arah perputaran dan dua macam frekuensi pulsa guna mengatur kecepatan motor.
.
Gambar 2.3 (a) bentuk pulsa keluaran dari driver motor stepper (b) penerapan
pulsa driver pada motor stepper dan arah putaran yang bersesuaian
Arah putaran motor dapat diatur dengan mengatur kondisi logika masukan pada pena 13 dari IC 74LS86. Jika diterapkan logika 0, maka motor akan berputar berlawanan dengan arah jarum jam (counter clock wise) sedangkan jika diterapkan logika 1, maka motor akan berputar dengan arah sesuai dengan ajah jarum jam (clockwise).
Gambar 2.4 bentuk gelombang keluaran rangkaian pembangkit pulsa
Pulsa di atas memiliki frekuensi dan periode yang konstan. Periode dari satu gelombang penuh adalah Tt (Time total). Th (Time high) adalah periode sinyal positif atau tinggi sedangkan Tl (Time low) adalah periode sinyal nol atau rendah. Periode gelombang keluaran tersebut ditentukan oleh VR1, VR2, R1, R2 dan C1. Kapasitor C2 hanya berfungsi sebagai penstabil rangkaian. Untuk menghitung Periode keluaran, dapat dilakukan dengan rumus berikut ini:
Th = 0,693 × C1 × (VR1 + R1 + R2) Tl = 0,693 × C1 × R2
Tt = Th + T Jadi periode gelombang (Tt) adalah:
f =
Tt
1
dimana f adalah frekunsi (Hz) Tt adalah time total ( sekon )
Karena motor yang digunakan terdiri atas 4 phase dan memiliki kecepatan sudut 1,80 per langkah, maka:
dimana : v adalah kecepatan motor ( rpm ) f adalah frekuensi (Hz )
digunakan transistor bipolar (BJT) tipe TIP31 yang disusun sebagai open collector switch. Transistor TIP31 adalah tergolong transistor daya menengah yang mampu mengalirkan arus puncak hingga 5 A. Transistor-transistor ini harus dilengkapi oleh lempengan pendingin dari aluminium untuk mengurangi panas yang terjadi akibat besarnya arus yang mengalir. L1 - L4 adalah lilitan (wound) dalam motor stepper. Dioda D1 - D4 berfungsi sebagai pelindung rangkaian dari tegangan tinggi (back EMF) yang mungkin timbul dari lilitan motor setepper.
2.5 Motor Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah pulsa
elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur
Stepper motor adalah salah satu tipe motor yang sangat populer digunakan sebagai peralatan penggerak/pemutar (movement unit/actuator) dalam sistem kontrol otomatis di industri, instrumentasi, bahan printer yang sering kita pakai sehari-hari
Pada dasarnya, prinsip kerja stepper motor ini sama DC Motor, yaitu pembangkitan medan magnit untuk memperoleh gaya tarik ataupun gaya lawan dengan menggunakan catu tegangan DC pada lilitan/kumparannya. Perbedaanya terletak pada gaya yang digunakan. Bila DC Motor menggunakan gaya lawan untuk ”melawan” atau mendorong ”fisik kutub magnet” yang dihasilkan maka stepper motor justru menggunakan gaya tarik untuk menarik ”fisik kutub magnet yang berlawanan” sedekat mungkin ke posisi kutub magnet dihasilkan oleh kumparan.Oleh karena itu, pada DC Motor, putaranya relatif tidak terkendal, jarak tolakannya sangat relatif, tergantung pada besar medan magnet yang dihasilkan. Sebaliknya pada stepper motor, gerakan motor terkendali karena begitu kutub yang berlawanan tadi sudah tarik-menarik dalam posisi yang paling dekat, gerakan akan berhenti dan direm.
rotor. Dengan demikian, posisi kutub magnet rotor akan ditarik mendekati lilitan yang menghasilkan kutub magnet tetap pada rotor itu akan berpinda posisi menuju kutub magnet lilitan yang dihasilkan sekarang. Berarti, telah terjadi gerakan 1 step. Bila langkah ini diulang terus-menerus, dengan memberikan tegangan secara bergantian ke lilitan-lilitan yang bersebelahan, rotor akan berputar.
Logika perputaran rotor tersebut dapat dianalogikan secara langsung dengan data 0 atau 1 yang diberikan secara serentak terhadap semua lilitan stator moto. Hal ini sangat memudahkan bagi sistem designer dalammencibtakan putaran-putaran stepper motor secara bebas dengan hanya mempermainkan bit-bit pada data yang dikirimkan ke rangkaian interface stepper motor tersebut.
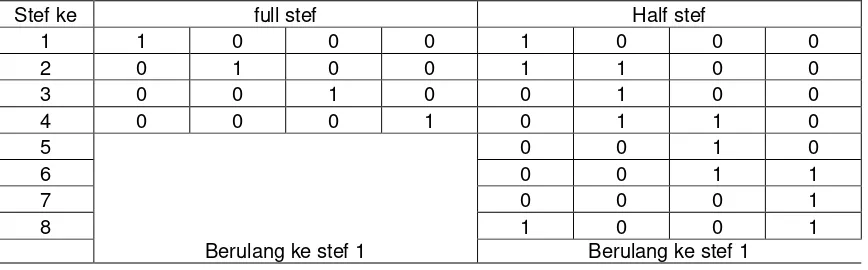
Untuk stepper motor 4 fase, pada prinsipnya ada dua macam cara kerja, yaitu full stef dan Half stef . Penjabatan formasi logika dalam tabel ini adalah untuk mewakili putaran 360° relatif terhadap fase dari motor.
Stepper Motor yang dijumpai di pasaran sebagian besar melipatgandakan jumlah kutub magnit kumparannya dengan memperbanyak kumparan stator sejenis melingkar berurutan dalam konfigurasi penuh 360° rill terhadap poros rotor ( dengan jumlah fase tetap). Hal ini dilakukan untuk memperoleh efek rill ” putaran 1 stef” yang lebih presisi, misalnya 3,6°/stef atau 1,8°/stef.
bersamaan dua lilitan mendapatkan arus kemudi. Dalam aplikasinya, sumber daya yang tersedia perlu diperhatikan.
Tabel 2.2 Formasi tegangan/logika pada Stepper Motor
Stef ke full stef Half stef
Berulang ke stef 1
0 0 1 0
6 0 0 1 1
7 0 0 0 1
8 1 0 0 1
Berulang ke stef 1
Tabel 2.3 Formasi double active bit untuk mode putaran full step
Stef ke Full step
1 1 1 0 0
2 0 1 1 0
3 0 0 1 1
4 1 0 0 1
Pada full step, suatu titik pada sebuah kutub magnet dirotor akan kembali mendapat tarikan medan magnet stator pada lilitan yang sama setelah step 4. Berikutnya, dapat diberikan lagi mulai dari stef satu 1. Untuk Half step semua kutub magnet pada rotor akan kembali mendapatkan tarikan dari medan magnet lilitan yang sama setelah step 8. Berikutnya mulai step 1.
presisi, biasanya jumah batang magnet di rotor di perbanyak dan lilitan dibuat berpasangan sesuai posisi kutub magnet rotor. Cara lain adalah menggunakan sistem gear pada poros rotor tanpa mengubah karakteristik stepper motornya.
2.6 Perangkat lunak
2.6.1 Bahasa Assembly MCS-51
Bahasa yang digunakan untuk memprogram IC mikrokontroler AT89C4051 adalah bahasa assembly untuk MCS-51. angka 51 merupakan jumlah instruksi pada bahasa ini hanya ada 51 instruksi, antara lain yaitu :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Contoh pengisian nilai secara langsung
MOV R0,#20h
Perintah di atas berarti : isikan nilai 20 Heksadesimal ke register 0 (R0). Tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah nilai. Contoh pengisian nilai secara tidak langsung
MOV 20h,#80h
...
...
MOV R0,20h
Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah alamat.
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk mengurangi nilai register tertentu dengan 1 dan lompat jika hasil pengurangannya belum nol. Contoh ,
MOV R0,#80h
Loop: ...
...
DJNZ R0,Loop
...
R0 -1, jika belum 0 lompat ke loop, jika R0 = 0 maka program akan meneruskan ke perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu. Contoh :
...
ACALL TUNDA
...
TUNDA:
...
4. Instruksi RET
ACALL TUNDA
...
TUNDA:
...
RET
5. Instruksi JMP (Jump)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh,
Loop:
...
...
JMP Loop
6. Instruksi JB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika high (1). Contoh,
Loop:
JB P1.0,Loop
...
7. Instruksi JNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika Low (0). Contoh,
Loop:
JNB P1.0,Loop
8. Instruksi CJNZ (Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register dengan suatu nilai tertentu. Contoh,
Loop:
...
CJNE R0,#20h,Loop
...
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin Loop. Jika nilai R0 sama dengan 20h,maka program akan melanjutkan instruksi selanjutnya.
9. Instruksi DEC (Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang dimaksud dengan 1. Contoh,
MOV R0,#20h R0 = 20h
...
DEC R0 R0 = R0 – 1
...
10.Instruksi INC (Increament)
Instruksi ini merupakan perintah untuk menambahkan nilai register yang dimaksud dengan 1. Contoh,
MOV R0,#20h R0 = 20h
...
INC R0 R0 = R0 + 1
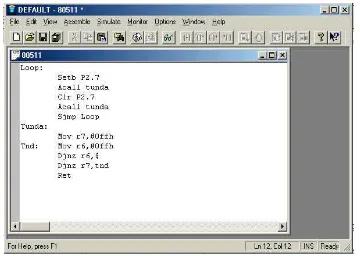
2.6.2Software 8051 Editor, Assembler, Simulator
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan pada sebuah editor, yaitu 8051 Editor, Assembler, Simulator. Tampilannya seperti di bawah ini.
Gambar 2.5 Software 8051 Editor, Assembler, Simulator
Setelah program selesai ditulis, kemudian di-save dan kemudian di-Assemble (di-compile). Pada saat di-assemble akan tampil pesan peringatan dan kesalahan. Jika masih ada kesalahan atau peringatan, itu berarti ada kesalahan dalam penulisan perintah atau ada nama subrutin yang sama, sehingga harus diperbaiki terlebih dahulu sampai tidak ada pesan kesalahan lagi.
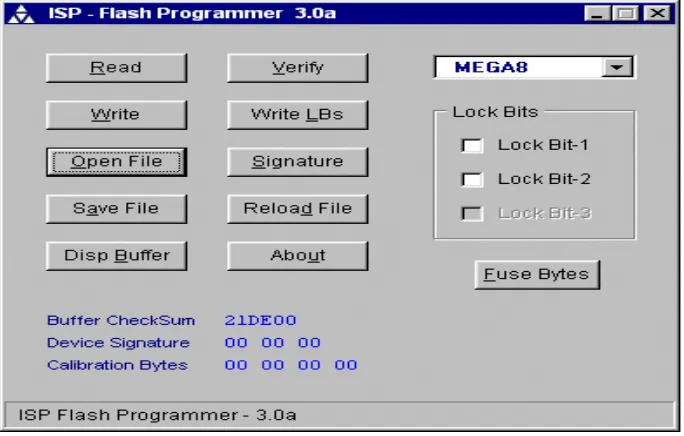
2.6.3 Software Downloader
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroller digunakan software ISP- Flash Programmer 3.0a yang dapat didownload dari internet.
Tampilannya seperti gambar di bawah ini
Gambar 2.6 ISP- Flash Programmer
BAB 3
RANCANG BANGUN DAN PROGRAM
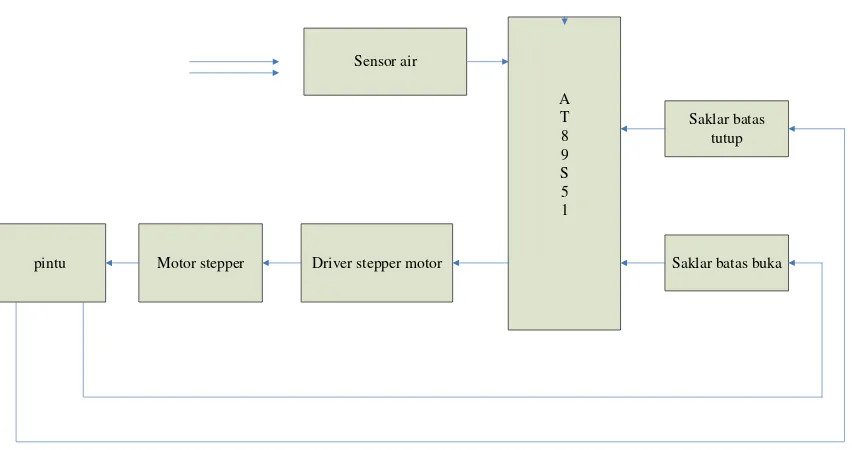
3.1 Diagram Blok Rangkaian
pintu Motor stepper Driver stepper motor
A T 8 9 S 5 1
Saklar batas tutup
Saklar batas buka Sensor air
Gambar 3.1 Diagram Blok Sistem pembuka/penutup pintu
Fungsi tiap blok:
Sensor air
Mikrokontroler AT89S51
merupakan pusat proses untuk mengendalikan semua perangkat pada pintu. Pada blok ini mikrokontroler telah diprogram untuk dapat membaca data dari penerima infra merah kemudian mengolah semua data tersebut dan selanjutnya mengambil keputusan perangkat mana saja yang harus dikendalikan.
Driver Stepper Motor
berfungsi untuk mengendalikan arah putaran motor stepper, sehingga pintu dapat bergeser dengan baik. Pada blok ini digunakan beberapa transistor untuk men-drive motor agar dapat berputar dan mengubah polaritas tegangan motor sehingga dapa mengubah arat putaran motor.
Motor Stepper
Motor ini berfungsi sebagai pengeser pintu,yaitu untuk membuka dan menutup pintu.
Saklar Batas buka
Saklar ini merupakan batas terbukanya pintu, saklar ini dikendalikan oleh mikrokontroler AT89S51.
Saklar batas tutup
Vreg
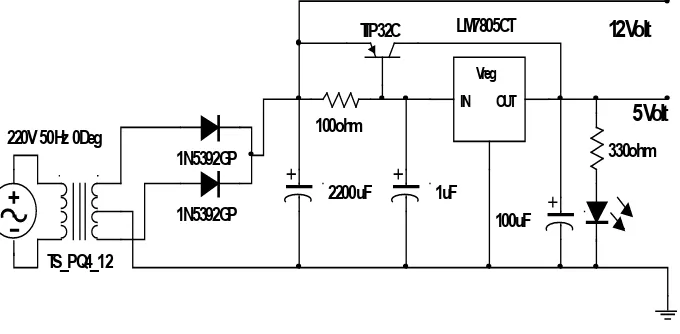
3.2 Perancangan Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian, sedangkan keluaran 12 volt digunakan untuk mensuplay tegangan ke motor stepper. Rangkaian power supplay ditunjukkan pada gambar 3.1 berikut ini :
Gambar 3.2 Rangkaian Power Supplay (PSA)
5V
rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
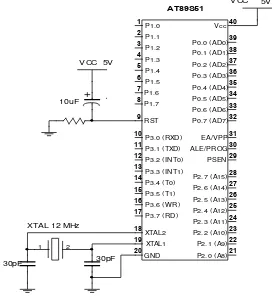
3.3. Perancangan Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh system yang ada. Kompoen utama dari rangkaian ini adalah IC mikrokontroler AT89S51. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Gambar 3.3 Rangkaian mikrokontroller AT89S51
Rangkaian mikrokontroler ini menggunakan komponen kristal 12 MHz sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
Pada pin 9 dihubungkan dengan sebuah kapasitor 10 uF yang dihubungkan ke positip dan sebuah resistor 10 Kohm yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktip. Lamanya waktu antara aktipnya power pada IC mikrokontroler dan aktipnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut. Jika dihitung maka lama waktunya adalah :
10 10 1 det
t=R x C= KΩ x
µ
F = m ik3.4 Rangkaian sensor air sederhana
Sensor air sederhana dapat dibuat scara langsung yaitu,hanya dengan menggunakan dua utas kabel. Sifat air yang dapat menghantar arus listrik dengan baik menbuat kita dapat mendeteksi adanya air yang telah menyentu sensor.
Salah satu utas kabel diberi tegangan listrik apabila air menyentuh kedua utas kabel maka arus listrik yang telah diberikan kepada salah satu utas kabel akan mengali ke kabel yang satu lagi. Tegangan listrik yang diberikan tentunya bukan tegangan listrik yang tinggi, sebap tegangan listrik yang tinggi akan membahayakan dan membunuh ekosistem pada bendungan. Tegangan yang di berikan hanyalah tegangan rendah 5V DC.
Gambar 3.4 Rangkaian sensor air sederhana
Kabel A Kabel B Kabel A Kabel B
3.5 Perancangan Rangkaian Driver Motor Stepper
Untuk mengendalikan perputaran motor stepper dibutuhkan sebuah driver. Driver ini berfungsi untuk memutar motor stepper searah dengan jarum jam atau berlawanan arah dengan jarum jam. Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat keluaran, dimana masing-masing masukan dihubungkan dengan mikrokontroler AT89S51 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal high (1) secara bergantian pada ke-4 masukannya. Rangkaiannya seperti gambar di bawah :
Gambar 3.5 Rangkaian Driver Motor Stepper
Rangkaian ini terdairi dari 4 buah transistor NPN TIP 122. Masing-masing transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler AT89S51. Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan kumparan yang terdapat pada
motor stepper, kemudian kumparan dihubungkan dengan sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122 mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktip dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan secara bergantian pada input dari driver motor stepper, maka motor stepper akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
3.6 Diagram Alir Program
sinyal buka pintu maka program akan memerintahkan motor untuk membuka pintu. Hal ini dapat dilihat lebih jelas pada gambar di bawah ini:
start
Sinyal buka? Sinyal tutup?
Ada sinyal?
Buka pintu Tutup pintu
tidak tidak
tidak ya
ya ya
Vreg LM7805CT
IN OUT
TIP32C
100ohm
100uF
330ohm 220V 50Hz 0Deg
TS_PQ4_12
2200uF 1uF 1N5392GP
1N5392GP
12 Volt
5 Volt BAB 4
ANALISA RANGKAIAN DAN PROGRAM
4.1 Pengujian Rangkaian Power Supplay (PSA)
Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk menghidupkan seluruh rangkaian, sedangkan keluaran 12 volt digunakan untuk menghidupkan motor stepper. Rangkaian tampak seperti gambar di bawah ini,
Gambar 4.1 Rangkaian Power Supplay (PSA)
P1.0
agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda. Tegangan ini digunakan untuk mensupplay tegangan ke yang butuh tegangan 12 volt.
4.2 Pengujian Rangkaian minimum AT89S51
Rangkaian minimum mikrokontroller AT89S51 ditunjukkan pada gambar 4.2 berikut ini :
Pengujian rangkaian mikrokontroler dilakukan dengan menghubungkan rangkaian ini dengan sebuah transistor A733 yang dihubungkan dengan sebuah LED indikator, dimana transistor disini berfungsi sebagai saklar untuk mengendalikan hidup/mati LED. Dengan demikian LED akan menyala jika transistor aktip dan sebaliknya LED akan mati jika transistor tidak aktip. Tipe transistor yang digunakan adalah PNP A733, dimana transistor ini akan aktip (saturasi) jika pada basis diberi tegangan 0 volt (logika low) dan transistor ini akan tidak aktip jika pada basis diberi tegangan 5 volt (logika high). Basis transistor ini dihubungkan ke pin I/O mikrokontroler yaitu pada kaki 28 (P2.7). Langkah selanjutnya adalah mengisikan program sederhana ke mikrokontroler AT89S51. Programnya adalah sebagai berikut : Loop:
Program di atas akan mengubah logika yang ada pada P2.7 selama selang waktu tunda. Jika logika pada P2.7 high maka akan diubah menjadi low, demikian jiga sebaliknya jika logika pada P2.7 low maka akan diubah ke high, demikian seterusnya.
terus menerus sesuai dengan program yang diinginkan, maka rangkaian mikrokontroler telah berfungsi dengan baik.
4.3Pengujian Rangkaian Driver Motor Stepper
Setelah mendapatkan data startbit, maka mikrokontroler akan mengambil 3 data setelah data startbit tersebut, yang merupakan data dari nilai yang dikirimkan oleh pemancar.
Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat keluaran, dimana masing-masing masukan dihubungkan dengan mikrokontroler AT89S51 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal high (1) secara bergantian pada ke-4 masukannya. Rangkaiannya seperti gambar di bawah :
Gambar Rangkaian Driver Motor Stepper
Rangkaian ini terdairi dari 4 buah transistor NPN TIP 122. Masing-masing transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler AT89S51. Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122 mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktip dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan secara bergantian pada input dari driver motor stepper, maka motor stepper akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Program yang diberikan pada driver motor stepper untuk memutar motor stepper adalah sebagai berikut :
mov a,#11h
putar:
mov P0,a
acall tunda
Rl a
jmp putar
Program diawali dengan memberikan nilai 11h pada pada accumulator (a), kemudian program akan memasuki rutin buka pintu. Nilai a diisikan ke port 0, sehingga sekarang nilai port 0 adalah 11h. ini berarti P0.0 dan P0.4 mendapatkan logika high sedangkan yang lainnya mendapatkan logika low, seperti table di bawah ini,
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 0 1 0 0 0 1
Program dilanjutkan dengan memanggil rutin tunda. Lamanya tunda akan mempengaruhi kecepatan perputaran motor. Semakin lama maka tunda, maka perputaran motor akan semakin lambat. Perintah berikutnya adalah Rl a,perintah ini akan memutar nilai yang ada pada accumulator (a), seperti tampak pada table di bawah ini,
a 0 0 0 1 0 0 0 1
Rl
high (1). Nilai yang ada pada accumulator (a), akan kembali diisikan ke port 0, maka nilai di port 0 akan berubah menjadi 22h, ini berarti P0.1 dan P0.5 mendapatkan logika high sedangkan yang lainnya mendapatkan logika low.
Sebelumnya telah dibahas bahwa P0.0, P0.1, P0.2, dan P0.3 dihubungkan ke masukan driver motor stepper, dengan program di atas maka P0.0, P0.1, P0.2, dan P0.3 akan mendapatkan nilai high (1) secara bergantian. Hal ini menyebabkan motor stepper akan berputar membuka pintu.Hal yang sama juga berlaku ketika motor berputar kaearah sebaliknya, perbedaannya hanya pada perintah rotate. Jika pada perintah berlawanan arah jarum jam digunakan rotate left ( Rl ), maka pada perintah searah jarum jam digunakan perintah rotate right ( Rr). Perputaran perintah Rr diperlihatkan pada table berikut,
a 1 0 0 0 1 0 0 0
R r
Untuk lebih jelasnya dapat dilihat pada tabel data motor stepper dibawah ini:
Tabel 4.1 Data Motor Stepper Untuk membuka dan Menutup
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain:
1. Sistem pengendali pintu kanal banjir pada bendungan ini menggunakan Mikrokontroler AT89S51 sebagai tempat pemproses data dari sistem yang berfungsi untuk menerima sinyal dari sensor air serta menggerakkan motor untuk membuka dan menutup pintu.
2. Motor stepper merupakan motor dengan gerak bertahap, sehingga jumlah perputarannya dan sudut perputara dari motor stepper tersebut dapat di kendalikan.
5.2. Saran
Setelah melakukan penulisan ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat dilakukan perancangan lebih lanjut, yaitu
Sistem penerima pada pintu jarak jauh ini menggunakan mikrokontroler AT89S51, bagaimana kalau dikembangkan dengan menggunakan mikrokontroler jenis lain, misalnya ATmega 8535
Alat pembuka pintu kanal banjir otomatis ini masih berupa prototipe, untuk itu hendaknya lebih dikembangkan lagi ke alat yang sebenarnya, supaya dapat langsung diaplikasikan.
DAFTAR PUSTAKA
Agfianto. 2004. Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi. Edisi Kedua. Yogyakarta: Gava Media
Andi. 2003. Panduan Praktis Teknik Antarmuka dan Pemrograman Mikrokontroler
AT89C51. Jakarta: PT Elex Media Komputindo.
Malvino, Albert paul. 2003. Prinsip-prinsip Elektronika. Jilid 1 & 2. Edisi Pertama. Jakarta: Salemba Teknika.
Petruzella, Frank D. 2001. Elektronik Industri. Terjemahan sumanto. Edisi kedua. Yogyakarta: Andi
Pitowarno, Endra. 2005. Mikroprosesor & Interfacing. Yogyakarta: Andi