INTELLIGENT PARKING SYSTEM
LAPORAN PRAKTEK PROYEK
ARY ARYZKY
072408010
PROGRAM STUDI FISIKA INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
LEMBAR PERSETUJUAN
Judul : INTELLIGENT PARKING SYSTEM
Kategori : LAPORAN PRAKTEK PROYEK
Nama : ARY ARYZKY ( 072408010 )
Program Studi : DIPLOMA (D3) FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
(FMIPA) UNIVERSITAS SUMATERA UTARA
Diketahui/Disetujui oleh
Ketua Program Studi, Pembimbing
D3 Fisika Instrumentasi
Drs. Syahrul Humaidi, M.Sc
KATA PENGANTAR
Dengan mengucapkan puji dan syukur kehadirat Tuhan Yang Maha Esa atas berkat rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan laporan praktek proyek ini yang merupakan salah satu kewajiban dan salah satu syarat untuk memperoleh gelar Ahli Madya di jurusan Fisika Instrumentasi, Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
Laporan ini penulis susun setelah menyelesaikan praktek proyek berdasarkan pengetahuan yang penulis serap selama di bangku kuliah, dan juga dari hasil pengalaman menjalani pendidikan.
Penulisan laporan ini tidak terlepas dari bantuan berbagai pihak baik berupa dorongan semangat maupun sumbangan pemikiran. Oleh karena itu, pada kesempatan ini penulis menyampaikan ucapan terima kasih kepada semua pihak yang telah memberikan bantuan dan bimbingan, terutama kepada :
1. Bapak Dr. Sutarman, M.Sc selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Sumatera Utara.
2. Bapak Drs. Syahrul Humaidi,Msc selaku ketua Departemen Fisika Instrumentasi, Fakultas Matematika dan Ilmu Pengetahuan Alam Sumatera Utara.
3. Ibu Dra. Justinon,M.si selaku Sekretaris Jurusan Departemen Fisika Instrumentasi, Fakultas Matematika dan Ilmu Alam Sumatera Utara.
5. Seluruh Bapak / Ibu Staff Pengajar dan Staff pegawai administrasi di lingkungan Departemen Fisika Instrumentasi, Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
6. Orang tua penulis serta adik adik yang telah banyak memberikan dorongan moral, material, dan doanya serta nasehat selama pengerjaan dan penyelesaian praktek proyek serta laporan ini.
7. Rekan-rekan Mahasiswa Fisika Instrumentasi yang telah banyak memberikan dukungan, khususnya stambuk 2007.
Penulis menyadari bahwa kekurangan dari isi laporan, dikarenakan keterbatasan kemampuan dalam hal mencari dan mengumpulkan data, mengolah dan menganalisa serta terbatasnya waktu. Oleh karena itu, dengan keterbukaan penulis menerima berbagai bentuk kritik dan saran yang diberikan demi kesempurnaan laporan praktek proyek ini.
Semoga dengan penulisan laporan praktek proyak ini dapat memberikan manfaat bagi para pembaca pada umumnya dan khususnya pada penulis, sebagai penambah ilmu pengetahuan dan alam.
Medan, Oktober 2010
DAFTAR ISI
Halaman
LEMBAR PERSETUJUAN i
KATA PENGANTAR ii
DAFTAR ISI iv
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Tujuan 2
1.3 Batasan Masalah 3
1.4 Manfaat Pembuatan Proyek 3
1.5 Sistematika Penulisan 3
1.6 Metodologi Penulisan 5
1.7 Waktu Pelaksanaan Praktek Proyek 5
BAB 2 LANDASAN TEORI 6
2.1 Intelligent Parking System 6
2.2 Perangkat Keras 8
2.2.1 Mikrokontroler 8
2.2.2 Mikrokontroler AT89S51 8
2.2.3 Penjelasan Fungsi PIN Mikrokontroler AT89S51 10
2.2.4 Display Seven Segment 13
2.2.5 Motor Stepper 14
2.3 Perangkat Lunak 15
2.3.1 Instruksi Transfer Data 15
2.3.2 Instruksi Aritmatik 16
2.3.3 Instruksi Logika 17
3.1 Perancangan Power Supply (PSA) 19
3.2 Rangkaian Mikrokontroler AT89S51 20
3.3 Display Seven Segment 21
3.4 Rangkaian Sensor 22
3.5 Rangkaian Pengendali Motor Stepper 24
3.6 Rangkaian LED Indikator 26
BAB 4 PENGUJIAN ALAT DAN PROGRAM 28
4.1 Pengujian Rangkaian Mikrokontroler AT89S51 28 4.2 Pengujian Rangkaian Display Seven Segment 30 4.3 Pengujian Rangkaian Driver Motor Stepper 33
4.4 Pengujian Rangkaian Penerima Sensor 37
BAB 5 PENUTUP 39
5.1 Kesimpulan 39
5.2 Saran 40
BAB 1
PENDAHULUAN
1.1.Latar Belakang
Perparkiran merupakan tempat yang penting dalam sebuah pusat perkantoran aatupun pusat perbelanjaan. Disinilah kendaraan ditempatkan agar lebih teratur dan lebih aman. Agar kendaraan lebih teratur dan tidak terlalu padat, biasanya tempat perparkiran ini dibagi menjadi beberapa tempat. Dengan demikian kendaraan yang diparkir akan lebih teratur dan keluar/masuknya kendaraan akan lebih mudah.
Namun dengan cara seperti di atas masih terdapat kekurangan, yaitu pengendara tidak mengetahui lokasi perparkiran mana yang masih memiliki tempat kosong dan lokasi perparkiran mana yang sudah penuh, akibatnya pengendara harus berputar-putar untuk mencari lokasi yang masih memiliki kosong.
Untuk mengatasi masalah tersebut dibutuhkan sesuatu yang dapat memberitahukan kepada pengendara untuk lokasi perparkiran yang masih memiliki kosong dan lokasi perparkiran mana yang sudah penuh ataupun lokasi perparkiran tersebut sudah penuh sama sekali. Dengan demikian maka pengemudi tidak perlu berputar-putar mencari lokasi yang masih memiliki tempat kosong.
perlu sibuk-sibuk mencarinya. Akan lebih lengkap lagi jika pada masing-masing lokasi perparkiran display berupa tanda bahwa lokasi tersebut telah diisi oleh kenderaan lai atau masih kosong. Dan pada pintu masuk sebaiknya diberi palang, dimana palang ini akan menutup secara otomatis jika lokasi perparkiran tersebut telah penuh dan akan membuka secara otomatis jika lokasi perparkiran itu memiliki tempat yang kosong.
Atas dasar pemikiran tersebut maka disini penulis mencoba untuk membuat sebuah simulasi perparkiran secara otomatis sehingga dengan demikian diharapkan alat yang akan dirancang oleh penulis dapat lebih menyempurnakan system perparkiran yang telah ada selama ini.
1.2.Tujuan
Tujuan dilakukan Tugas Akhir ini adalah sebagai berikut:
1. Memanfaatkan mikrokontroler sebagai alat penghitung jumlah kendaraan roda 4 (empat) dalam dua lokasi perparkiran.
2. Memanfaatkan sinar infra merah sebagai sensor untuk menghitung jumlah kendaraan yang masuk/keluar dalam suatu lokasi perparkiran dan memberitahukan lokasi perparkiran yang masih tersedia.
3. Membuat sebuah alat intelligent yang dapat mengatur dan mengontrol sebuah lokasi perparkiran secara otomatis.
Adapun yang menjadi batasan masalah pada penelitian ini adalah:
1. Mikrokontroler yang digunakan adalah mikrokontroler AT89S51.
2. Sensor yang digunakan untuk menghitung jumlah kendaraan yang keluar/masuk serta pemberi tahu lokasi yang masih kosong adalah infra merah dan potodioda. 3. Display angka yang menampilkan banyaknya tempat yang masih kosong adalah
dengan menggunakan seven segmen.
4. Untuk menggerakkan palang digunakan motor stepper.
1.4.Manfaat Pembuatan Proyek
Manfaat yang diharapkan dari pembuatan proyek ini adalah:
1. Sebagai informasi bagaimana dasar membangun sebuah instrumen yang mampu mengatur sebuah lokasi perparkiran secara otomatis.
2. Mempermudah pengendara dalam memilih tempat untuk memarkirkan kenderaannya di dalam sebuah lokasi perparkiran.
3. memodernisasi system perparkiran yang sudah ada selama ini sehingga menjadi lebih efisien.
1.5.Sistematika Penulisan
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, tujuan penulisan, batasan masalah, serta sistematika penulisan.
BAB II. LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian Teori pendukung itu antara lain tentang mikrokontroler AT89S51 (hardware dan software), bahasa program yang digunakan, serta cara kerja dari photodioda, dan motor stepper.
BAB III. PERANCANGAN ALAT DAN PROGRAM
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang akan diisikan ke mikrokontroler AT89S51.
BAB IV. ANALISA RANGKAIAN DAN SISTEM KERJA ALAT
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai program-program yang digunakan untuk mengaktifkan rangkaian, penjelasan mengenai program yang diisikan ke mikrokontroler AT89S51.
BAB V. KESIMPULAN DAN SARAN
1.6.Metodologi Penulisan
Adapun metode laporan praktek proyek ini adalah :
1. Identifikasi masalah dengan penelurusan referensi baik dari buku maupun dari hasil browsing di situs-situs internet.
2. Perancangan dan pengujian alat.
1.7.Waktu pelaksanaan Praktek Proyek
Waktu pelaksanaan praktek proyek ini adalah 2 2010, dengan perincian kegiatan sebagai berikut :
1. Pencarian literature sebagai bahan pembelajaran. 2. Merancang sistem parkir otomatis.
3. Merancang program pada mikrokontroler.
BAB 2
LANDASAN TEORI
2.1. Inteligent Parking System
Agar kendaraan lebih teratur dan tidak terlalu padat, biasanya tempat perparkiran ini dibagi menjadi beberapa tempat. Dengan demikian kendaraan yang diparkir akan lebih teratur dan keluar / masuknya kendaraan akan lebih mudah.
Namun dengan cara seperti di atas masih terdapat kekurangan, yaitu pengendara tidak mengetahui lokasi perparkiran mana yang masih memiliki tempat kosong dan lokasi perparkiran mana yang sudah penuh, akibatnya pengendara harus berputar - putar untuk mencari lokasi yang masih memiliki kosong.
Untuk mengatasi masalah tersebut dibutuhkan sesuatu yang dapat memberitahukan kepada pengendara untuk lokasi perparkiran yang masih memiliki kosong dan lokasi perparkiran mana yang sudah penuh ataupun lokasi perparkiran tersebut sudah penuh sama sekali. Dengan demikian maka pengemudi tidak perlu berputar-putar mencari lokasi yang masih memiliki tempat kosong.
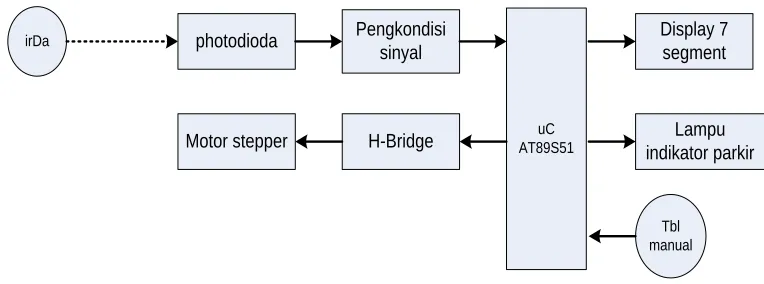
Adapun skema dan penjelasan dari Inteligent parking system yang akan dirancang dapat dilihat dari diagram blok berikut:
photodioda Pengkondisi
sinyal irDa
uC AT89S51
Motor stepper H-Bridge
Display 7 segment Lampu indikator parkir Tbl manual
Gambar 2.1. Diagram Blok
secara otomatis. Tombol manual berfungsi untuk membuka palang secara manual pada pintu keluar perparkiran.
2.2. Perangkat Keras
Perangkat keras merupakan bentuk fisik dari sistem Inteligent Parking yang terdiri dari power supply, Mikrokontroller AT89S51, Display 7 Segment, H-Bridge, Motor Stepper,
2.2.1. Mikrokontroler
Mikrokontroler adalah single chip computer yang memiliki kemampuan untuk diprogram dan digunakan untuk tugas-tugas yang berorientasi kontrol. Mikrokontroler berkembang dengan dua alasan utama, yaitu kebutuhan pasar (market needed) dan perkembangan teknologi baru. Yang dimaksud dengan kebutuhan pasar yaitu kebutuhan manusia yang semakin besar terhadap alat-alat elektronik dengan perangkat pintar sebagai pengontrol dan pemroses data. Sedangkan yang dimaksud dengan perkembangan teknologi baru adalah perkembangan teknologi semikonduktor yang memungkinkan pembuatan chip dengan kemampuan komputasi yang sangat cepat, bentuk yang semakin mungil, dan harga yang semakin murah.
2.2.2. Mikrokontroler AT89S51
Mikrokontroler seri 8051 merupakan salah satu seri mikrokontroler yang paling banyak digunakan di seluruh dunia karena memiliki fasilitas onchip memory. Perusahaan ATMEL membuat seri ini dengan nama AT89S51. Mikrokontroler AT89S51 memiliki fitur sebagai berikut:
ROM atau Read Only Memory adalah tempat penyimpanan program yang diisikan pada mikrokontroler. ROM hanya bisa dibaca. ROM biasanya berisi kode/ program untuk mengontrol kerja mikrokontroler. Kapasitas memori yang disediakan oleh AT89S51 ini adalah 4 kilobyte
• 128 bytes RAM
RAM atau Random Access Memory adalah memori yang berisi data yang akan dieksekusi oleh mikrokontroler. RAM bisa ditulis dan dibaca, bersifat volatile (isinya hilang jika power/ sumber tegangan dihilangkan). Kapasitas memori yang disediakan oleh AT89S51 adalah 128 bytes.
• 4 buah 8-bit I/O (Input/Output) port
Port ini berfungsi sebagai terminal input dan output. Selain itu, dapat digunakan
sebagai terminal komunikasi paralel, serta komunikasi serial (pin10 dan 11). • 2 buah 16 bit timer
• Interface komunikasi serial
• 64K pengalamatan code (program) memori • 64K pengalamatan data memori
• Prosesor Boolean (satu bit-satu bit)
Dengan fitur ini, mikrokontroler dapat melakukan operasi logika seperti AND, OR, EXOR, dan lain-lain.
• 210 lokasi bit-addressable, dan
Arsitektur hardware mikrokontroler AT89S51 dari perspektif luar atau biasa disebut pinout digambarkan pada gambar 2.3 di bawah ini :
Gambar 2.3.Pin-Out mikrokontroler AT89S51
Berikut adalah penjelasan mengenai fungsi dari tiap-tiap pin (kaki) yang ada pada mikrokontroler AT89S51.
• Port 0
Merupakan dual-purpose port (port yang memiliki dua kegunaan). Pada disain yang minimum (sederhana), port 0 digunakan sebagai port Input/Output (I/O). Sedangkan pada disain lebih lanjut pada perancangan dengan memori eksternal digunakan sebagai data dan address (alamat) yang di-multiplex. Port 0 terdapat pada pin 32-39.
Merupakan port yang hanya berfungsi sebagai port I/O (Input/Output). Port 1 terdapat pada pin 1-8.
• Port 2
Merupakan dual-purpose port. Pada disain minimum digunakan sebagai port I/O (Input/Output). Sedangkan pada disain lebih lanjut digunakan sebagai high byte dari address (alamat). Port 2 terdapat pada pin 21-28.
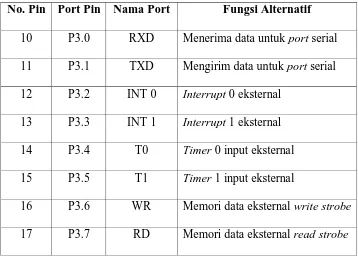
• Port 3
Merupakan dual-purpose port. Selain sebagai port I/O (Input/Output), port 3 juga mempunyai fungsi khusus. Fungsi khusus tersebut diperlihatkan pada tabel 2.1. Port 3 terdapat pada pin 10-17.
No. Pin Port Pin Nama Port Fungsi Alternatif
10 P3.0 RXD Menerima data untuk port serial 11 P3.1 TXD Mengirim data untuk port serial 12 P3.2 INT 0 Interrupt 0 eksternal
13 P3.3 INT 1 Interrupt 1 eksternal 14 P3.4 T0 Timer 0 input eksternal 15 P3.5 T1 Timer 1 input eksternal
16 P3.6 WR Memori data eksternal write strobe 17 P3.7 RD Memori data eksternal read strobe
PSEN adalah sinyal kontrol yang mengizinkan untuk mengakses program (code) memori eksternal. Pin ini dihubungkan ke pin OE (Output Enable) dari EPROM. Sinyal PSEN akan “0” (LOW) pada tahap fetch (penjemputan) instruksi. PSEN akan selalu bernilai “1” (HIGH) pada pembacaan program memori internal. PSEN terdapat pada pin 29.
• ALE (Address Latch Enable)
ALE digunakan untuk men-demultiplex address (alamat) dan data bus. Ketika menggunakan program memori eksternal, port 0 akan berfungsi sebagai address (alamat) dan data bus. Pada setengah paruh pertama memori cycle ALE akan bernilai “1” (HIGH) sehingga mengizinkan penulisan address (alamat) pada register eksternal. Dan pada setengah paruh berikutnya akan bernilai “1” (HIGH) sehingga port 0 dapat digunakan sebagai data bus. ALE terdapat pada pin 30.
• EA (External Access)
Jika EA diberi input “1” (HIGH), maka mikrokontroler menjalankan program memori internal saja. Jika EA diberi input “0” (LOW), maka AT89S51 menjalankan program memori eksternal (PSEN akan bernilai “0”). EA terdapat pada pin 31.
• RST (Reset)
RST terdapat pada pin 9. Jika pada pin ini diberi input “1” (HIGH) selama minimal 2 machine cycle, maka sistem akan di-reset ( kembali ke awal )
• On-Chip oscillator
Nilai kristal yang biasa digunakan pada AT89S51 ini adalah 12 MHz. On-chip oscillator tidak hanya dapat di-drive dengan menggunakan kristal, tetapi juga dapat
dengan menggunakan TTL Oscillator.
• Koneksi power
AT89S51 beroperasi pada tegangan 5 volt. Pin Vcc terdapat pada pin 40, sedangkan pin Vss (ground) terdapat pada pin 20.
2.2.4. Display Seven Segment
Seven Segment adalah suatu segmen- segmen yang digunakan menampilkan angka. Seven segmen ini tersusun atas 7 batang LED yang disusun membentuk angka 8 dengan menggunakan huruf a-f yang disebut DOT MATRIKS. Setiap segmen ini terdiri dari 1 atau 2 Light Emitting Diode ( LED ).
Gambar 2.4. Seven segmen
Seven segmen dapat dibedakan menjadi dua macam yaitu Common Anoda dan Common Katoda.
• Common Anoda
pembatas arus keluar dari penggerak. Karena dihubungkan ke Vcc, maka Common Anoda ini berada pada kondisi Aktif High.
• Common Katoda
Pad Common Katoda, semua katoda disatukan secara paralel dan dihubungkan ke ground. Karena seluruh katoda dihubungkan ke ground, maka Common Katoda ini berada pada kondisi Aktif Low.
2.2.5. Motor Stepper
Motor stepper merupakan salah satu komponen elektronika yang gerakan rotor-nya dapat dikontrol dengan memberikan pulsa - pulsa yang dihasilkan dari sistem digital seperti mikroprosesor dan komputer. Motor stepper ini dirancang untuk aplikasi - aplikasi pengontrolan digital seperti penggerak lengan robot, printer, pintu elektronik dan lain sebagainya. Kebanyakan sistem pengontrolan motor stepper tersebut masih menggunakan kabel sebagai media transmisi. Pengontrolan ini juga sering dilakukan dengan menggunakan komputer PC sebagai basis pengontrolnya.
2.3. Perangkat Lunak
Perangkat lunak (software) adalah seperangkat intruksi yang disusun menjadi sebuah program untuk memerintahkan microcomputer melakukan suatu pekerjaan. Sebuah instruksi selalu berisi kode operasi (op-code), kode pengoperasian inilah yang disebut dengan bahasa mesin yang dapat dimengerti oleh mikrokontroller. Instruksi-instruksi yang digunakan dalam memprogram suatu program yang diisikan pada AT89S51 adalah instruksi bahasa pemograman assembler atau sama dengan intruksi pemograman pada IC mikrokontrller 8031 dan MCS51.
2.3.1. Instruksi Transfer Data
Instruksi transfer data terbagi menjadi dua kelas operasi sebagai berikut :
• Transfer data umum ( General Purpose Transfer ), yaitu : MOV, PUSH dan POP.
• Transfer spedifik akumulator ( Accumulator Specific Transfer ), yaitu : XCH, XCHD, dan MOVC.
Instruksi transfer data adalah intruksi pemindahan /pertukaran data antara operand sumber dengan operand tujuan. Operand-nya dapat berupa register, memori atau lokasi suatu memori. Penjelasan instruksi transfer data tersebut dapat dijelaskan sebagai berikut.
MOV : Transfer data dari Register satu ke Register yang lainnya, antara Register dengan Memory.
PUSH : Transfer byte atau dari operand sumber ke suatu lokasi dalam stack yang alamatnya ditunjuk oleh register penunjuk.
XCHD : Pertukaran nibble orde rendah antara RAM internal ( lokasinya ditunjukkan oleh R0 dan R1 )
2.3.2. Instruksi Aritmatik
Operasi dasar aritmatik seperti penjumlahan, pengurangan, perkalian dan pembagian dimiliki oleh AT89S51 dengan mnemonic : INC, ADD, SUBB, DEC, MUL dan DIV. Penjelasan dari operasi mnemonic tersebut dijelaskan sebagai berikut :
INC : Menambah satu isi sumber operand dan menyimpan hasilnya ke operand tersebut
ADD : Penjumlahan antara akumulator dengan sumber operand dan hasilnya disimpan di akumulator
SUBB : Pengurangan akumulator dengan sumber operand, hasilnya disimpan dalam operand tersebut.
DEC : Mengurangi sumber operand dengan 1. dan hasilnya disimpan pada operand tersebut.
MUL : Perkalian antara akumulator dengan Register B.
DIV : Pembagian antara akumulator dengan Register B dan hasilnya disimpan dalam akumulator, sisanya di Register B.
2.3.3. Instruksi Logika
• Operasi logika operand tunggal, yang terdiri dari CLR, SETB, CPL, RL, RR, dan SWAP.
• Operasi logika dua operand seperti : ANL, ORL, dan XRL.
Operasi yang dilkukan oleh AT89S51 dengan pembacaan instruksi logika tersebut dijelaskan dibawah ini :
CLR : Menghapus byte atau bit menjadi nol. SETB : Menggeser bit atau byte menjadi satu. CPL : Mengkomplemenkan akumulator. RL : Rotasi akumulator 1 bit ke kiri. RR : Rotasi akumulator ke kanan. SWAP : Pertukaran nibble orde tinggi.
2.3.4. Instruksi Transfer Kendali
Instruksi transfer kendali (control transfer) terdiri dari (3) tiga kelas operasi yaitu :
• Lompatan tidak bersyarat ( Unconditional Jump ) seperti : ACALL, AJMP, LJMP,SJMP
• Lompatan bersyarat ( Conditional Jump ) seperti : JZ, JNZ, JB, CJNE, dan DJNZ.
• Insterupsi seperti : RET dan RET1. Penjelasan dari instruksi diatas sebagai berikut :
LCALL : Pemanggilan subroutine yang mempunyai alamat antara 2 Kbyte – 64 Kbyte.
AJMP : Lompatan untuk percabangan maksimum 2 Kbyte. LJMP : Lompatan untuk percabangan maksimum 64 Kbyte. JNB : Percabangan bila bit tidak diset.
JZ : Percabangan akan dilakukan jika akumulator adalah nol. JNZ : Percabangan akan dilakukan jika akumulator adalah tidak nol. JC : Percabangan terjadi jika CY diset “1”.
CJNE : Operasi perbandingan operand pertama dengan operand kedua, jika tidak sama akan dilakukan percabangan.
DJNZ : Mengurangi nilai operand sumber dan percabangan akan dilakukan apabila isi operand tersebut tidak nol.
RET : Kembali ke subroutine.
BAB 3
PERANCANGAN ALAT DAN CARA KERJA
3.1. Perancangan Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian. Rangkaian power supplay
ditunjukkan pada gambar 3.1 berikut ini :
Gambar 3.1 Rangkaian Power Supplay (PSA)
apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
3.2. Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh system yang ada. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Gambar 3.2 Rangkaian Mikrokontroller AT89S51
bit open collector dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama adanya akses ke memori program eksternal. Pada port 0 ini masing masing pin dihubungkan dengan resistor 4k7 ohm. Resistor 4k7 ohm yang dihubungkan ke port 0 befungsi sebagai pull up( penaik tegangan ). Pin 1 sampai 8 adalah port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10 sampai 17 adalah port 3.. Pin 20 merupakan ground dihubungkan dengan ground pada power supplay. Pin 40 merupakan sumber tegangan positif dihubungkan dengan + 5 volt dari power supplay.
3.3. Display Seven Segment
Untuk menampilkan jumlah orang yang masuk ke dalam ruangan diperlukan suatu rangkaian display yang dapat menampilkan jumlah orang yang masuk ke dalam ruangan tersebut. Rangkaian display yang digunakan untuk menampilkan jumlah orang yang masuk ke dalam ruangan terlihat pada gambar berikut:
Gambar 3.3. Rangkaian Display Seven Segment
AT89S51. P3.0 merupakan fasilitas khusus pengiriman data serial yang disediakan oleh mikrokontroler AT89S51. Sedangkan P3.1 merupakan sinyal clock untuk pengiriman data serial. Pada rangkaian display ini digunakan dua buah dioda yang berfungsi untuk menurunkan tegangan supply untuk seven segment. Satu buah dioda dapat menurunkan tegangan sekitar 0,6 volt. Jadi, apabila dioda yang digunakan dua buah maka tegangan yang dapat diturunkannya adalah 1,8 volt. Tegangan ini diturunkan agar umur seven segment lebih tahan lama dan karena tegangan maksimum seven segment adalah 3,7 volt.
3.4. Rangkaian Sensor
Untuk dapat mendeteksi kenderaan yang masuk, maka alat dilengkapi dengan sensor. sensor menggunakan 2 buah pemancar infra merah dan sebuah potodioda. Sensor ini memanfaatkan pantulan dari pemancar infra merah yang diterima oleh potodioda. Digunakan 2 buah pemancar infra merah pada masing - masing sensor bertujuan agar pancaran sinyal semakin kuat, sehingga sensor benar benar dapat mendeteksi kenderaan yang melewatinya. jika tidak ada kendaraan yang melewati sensor, maka pancaran sinar infra merah akan mengenai potodioda dan sebaliknya bila ada kendaraan yang melewati sensor, maka pancaran sinar infra merah tidak akan mengenai potodioda . Perbedaan intensitas inilah yang digunakan untuk mendeteksi adanya kenderaan yang melewati sensor atau tidak.
Rangkaian pemancar infra merah tampak seperti gambar di bawah ini:
Gambar 3.4. Rangkaian Pemancar infra merah
Pada rangkaian di atas digunakan 2 buah LED infra merah yang diparalelkan, dengan demikian maka intensitas yang dipancarkan oleh infra merah semakin kuat, karena merupakan gabungan dari buah LED infra merah. Resistor yang digunakan adalah 100 ohm sehingga arus yang mengalir pada masing-masing LED infra merah adalah sebesar:
5
0, 05
50
100
V
i
A atau
mA
R
= =
=
Dengan besarnya arus yang mengalir ke LED infra merah, maka intensitas pancaran infra merah akan semakin kuat, yang menyebabkan jarak pantulannya akan semakin jauh.
logika low (0), namun jika fotodioda tidak menerima pantulan sinar infra merah, maka output dari rangkaian penerima akan mengeluarkan logika high (1). Rangkaian penerima infra merah seperti gambar di bawah ini:
Gambar 3.5. Rangkaian Penerima Sinar Infra Merah
3.5. Rangkaian Pengendali Motor Stepper
Motor stepper digunakan agar dapat ebka dan menutup pintu secara otomatis pada aplikasi yang dirancang. Dan Untuk mengendalikan perputaran motor stepper dibutuhkan sebuah driver. Driver ini berfungsi untuk memutar motor stepper searah dengan jarum jam atau berlawanan arah dengan jarum jam. Rangkaian ini dihubungkan ke port 0 dari mikrokontroler AT89S51. sehingga untuk memutar motor, harus diberikan logika high secara bergantian ke port 0. Sedangkan untuk memutar motor ke arah sebaliknya, maka logika high yang diberikan secara bergantian tersebut harus berlawanan arah dengan sebelumnya. Dengan demikian maka pergerakan motor stepper sudah dapat dikendalikan oleh mikrokontroler AT89S51
Rangkaian driver motor stepper ini terdiri dari empat masukan, dimana masing-masing masukan dihubungkan dengan mikrokontroler AT89S51 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal high (1) secara bergantian pada ke-4 masukannya.
Rangkaian ini terdairi dari 2 buah transistor NPN TIP 122 dan 2 buah transistor PNP TIP 127. Masing-masing transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler AT89S51. Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122 mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet tesebut.
motor stepper, maka motor stepper akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya, maka logika high (1) pada input driver motor stepper harus diberikan secara bergantian dengan arah yang berlawanan dengan sebelumnya.
3.6. Rangkaian LED Indikator
Rangkaian ini berfungsi sebagai indikator ketika lokasi perparkiran telah penuh ataupun masih dalam keadaan kosong. Rangkaian LED indikator datunjukkan oleh gambar 3.7 berikut ini :
Gambar 3.7. Rangkaian LED Indikator
BAB 4
PENGUJIAN ALAT DAN PROGRAM
4.1. Pengujian Rangkaian Mikrokontroller AT89S51
Pengujian pada rangkaian mikrokontroler AT89S51 ini dapat dilakukan dengan menghubungkan rangkaian minimum mikrokontroler AT89S51 dengan power suplay sebagai sumber tegangan. Kaki 40 dihubungkan dengan sumber tegangan 5 Volt, sedangkan kaki 20 dihubungkan dengan ground. Rangkaian pengujian mikrokontroller AT89S51 dapat dilihat pada gambar 4.1 berikut ini :
Dari rangkaian, tegangan pada kaki 40 diukur dengan menggunakan Voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 40 sebesar 4,9 Volt. Langkah selanjutnya adalah dengan cara menghubungkan pin 39 ( P0.0 ) dan pin 37 ( P0.2 ) dengan sebuah LED indikator. Tujuan pemasangan LED disini hanya bertujuan sebagai pengujian pada mikrokontroller saja. Dan tidak ada hubungannya dengan rangkaian utama. LED indikator pada rangkaian berfungsi sebagai output dari program yang diisikan ke dalam mikrokontroller AT89S51. Pengujian ini dilakukan untuk memastikan bahwa mikrokontroller AT89S51 dapat mengesekusi program dengan baik.
Selanjutnya program sederhana diisikan pada mikrokontroler AT89S51. Program yang diisikan adalah sebagai berikut :
Loop:
Setb P0.0
Clr P0.2
Call delay
Clr P0.0
setb P0.2
Call delay
Jmp loop
Delay:
Mov r7,#255
Dly:
Mov r6,#255
Djnz r6,$
Djnz r7,dly
Ret
Program di atas bertujuan untuk menyalakan / mematikan LED yang terhubung ke P0.0 dan P0.2 Secara bergantian (flip - flop). Perintah Setb P0.0 akan menjadikan P0.0 berlogika high yang menyebabkan LED tidak mendapat hubungan dengan ground sehingga LED akan mati. Perintah Clr P0.2 akan menjadikan P0.2 berlogika low yang menyebabkan LED terhubung dengan ground sehingga LED akan menyala.
Call delay akan menyebabkan LED ini menyala dna mati selama beberapa saat.
Perintah jmp Loop akan menjadikan program tersebut berulang, sehingga akan tampak LED tersebut menyala secara bergantian (flip - flop).
Jika program tersebut diisikan ke mikrokontroller AT89S51, kemudian mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka rangkaian minimum mikrokontroller AT89S51 telah bekerja dengan baik.
4.2. Pengujian Rangkaian Display Seven Segmen
Dari hasil pengujian diperoleh data yang harus dikirimkan ke port serial untuk menampilkan angka desimal adalah sebagai berikut:
Angka Data yang dikirim
1 0ECH
2 18H
3 88H
4 0C4H
5 82H
6 02H
7 0E8H
8 0h
9 80H
0 20H
Program yang diisikan pada mikrokontroler untuk menampilkan nilai-nilai tersebut adalah sebagai berikut:
bil0 equ 20h
bil1 equ 0ech
bil2 equ 18h
bil5 equ 82h
bil6 equ 02h
bil7 equ 0e8h
bil8 equ 0h
bil9 equ 80h
Loop:
mov sbuf,#bil0
Jnb ti,$
Clr ti
sjmp loop
Program di atas akan menampilkan angka 0 pada semua seven segmen. Sedangkan untuk menampilkan 3 digit angka yang berbeda pada seven segmen adalah dengan mengirimkan ke 3 data angka yang akan ditampilkan pada seven segmen. Programnya adalah sebagai berikut :
Loop: mov sbuf,#bil1 Jnb ti,$ Clr ti mov sbuf,#bil2 Jnb ti,$ Clr ti mov sbuf,#bil3 Jnb ti,$ Clr ti sjmp loop
4.3. Pengujian Rangkaian Driver Motor Stepper
Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat keluaran, dimana masing-masing masukan dihubungkan dengan mikrokontroler AT89S51 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal high (1) secara bergantian pada ke-4 masukannya. Rangkaiannya seperti gambar di bawah :
Gambar 4.3. Rangkaian Driver Motor Stepper
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122 mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet tersebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktip dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan secara bergantian pada input dari driver motor stepper, maka motor stepper akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya, maka logika high (1) pada input driver motor stepper harus diberikan secara bergantian dengan arah yang berlawanan dengan sebelumnya.
Program yang diberikan pada driver motor stepper untuk memutar motor stepper adalah sebagai berikut :
mov a,#11h
putar:
mov P0,a
Rl a
jmp putar
Program diawali dengan memberikan nilai 11h pada pada accumulator (a), kemudian program akan memasuki rutin buka pintu. Nilai a diisikan ke port 0, sehingga sekarang nilai port 0 adalah 11h. ini berarti P0.0 dan P0.4 mendapatkan logika high sedangkan yang lainnya mendapatkan logika low, seperti table di bawah ini,
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 0 1 0 0 0 1
Program dilanjutkan dengan memanggil rutin tunda. Lamanya tunda akan mempengaruhi kecepatan perputaran motor. Semakin lama maka tunda, maka perputaran motor akan semakin lambat. Perintah berikutnya adalah Rl a,perintah ini akan memutar nilai yang ada pada accumulator (a), seperti tampak pada table di bawah ini,
a 0 0 0 1 0 0 0 1
Rl
a 0 0 1 0 0 0 1 0
Dst...
Nilai pada accumulator (a) yang awalnya 11h, setelah mendapat perintah Rl a, maka nilai pada accumulator (a) akan merubah menjadi 22h. Kemudian program akan melihat apakah kondisi sensor buka pintu dalam keadaan high (1) atau low (0). Jika high (1),
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 1 0 0 0 1 0
Sebelumnya telah dibahas bahwa P0.0, P0.1, P0.2, dan P0.3 dihubungkan ke masukan driver motor stepper, dengan program di atas maka P0.0, P0.1, P0.2, dan P0.3 akan mendapatkan nilai high (1) secara bergantian. Hal ini menyebabkan motor stepper akan berputar membuka pintu.Hal yang sama juga berlaku ketika motor berputar kaearah sebaliknya, perbedaannya hanya pada perintah rotate. Jika pada perintah berlawanan arah jarum jam digunakan rotate left ( Rl ), maka pada perintah searah jarum jam digunakan perintah rotate right ( Rr). Perputaran perintah Rr diperlihatkan pada table berikut,
a 1 0 0 0 1 0 0 0
R r
a 0 1 0 0 0 1 0 0
Dst...
4.4. Pengujian Rangkaian Penerima Sensor
Pada rangkaian, output dari fotodioda diumpankan ke basis transistor tipe NPN C945, ini berarti untuk membuat transistor tersebut saturasi maka tegangan yang keluar dari fotodioda harus lebih besar dari 0,7 volt. Syarat ini akan terpenuhi jika fotodioda mendapatkan sinar infra merah. Analisanya sebagai berikut:
Jika tidak ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda 15 Mohm, sehingga:
2
330.000
5 0,107
1
2
15.000.000 330.000
R
Vo
xVcc
x
Volt
R
R
==
=
+
+
Vout akan diumpankan ke basis dari transistor C945, karena tegangannya hanya 0,107 Volt maka transistor tidak saturasi.
Jika ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda 300 Kohm, sehingga:
2
330.000
5 2, 619
1
2
300.000 330.000
R
Vo
xVcc
x
Volt
R
R
==
+
=
+
Vout akan diumpankan ke basis transistor C945, karena tegangannya lebih besar dari 0,7 volt yaitu 2,619 Volt maka transistor akan saturasi.
dikehendaki. Dan Sesuai dengan prinsip :
Ω =
K R A Potensio
V
1 maka dapat diketahui besar
penguatan yang telah di lakukan.
BAB 5
PENUTUP
5.1. Kesimpulan
Dari evaluasi hasil kerja alat dapat diambil beberapa kesimpulan dalam penelitian ini. Kesimpulan yang diambil oleh penulis adalah :
1. Fotodioda ini akan memiliki hambatan sekitar 15 s/d 20 Mohm jika tidak terkena sinar infra merah, dan hambatannya akan berubah menjadi sekitar 80 s/d 300 Kohm jika terkena sinar infra merah tergantung dari besarnya intensitas yang mengenainya. Semakin besar intensitasnya, maka hambatannya semakin kecil.
2. Fotodioda merupakan sebuah dioda dengan sambungan PN yang dipengaruhi cahaya dalam kerjanya. Cahaya yang dapat dideteksi oleh fotodioda ini mulai dari cahaya infra merah, cahaya tampak, ultra ungu sampai dengan sinar-X.
3. LED akan menyala jika sensor menerima sinar infra merah, dan akan mati jika sensor tidak menerima sinar infra merah.
1. Dengan beberapa pengembangan dan penyempurnaan sistem dari alat ini akan dapat lebih baik lagi hasilnya.
2. Dengan menambah sensor kita dapat mencakup daerah yang lebih luas lagi.
DAFTAR PUSTAKA
AT89S51 Microcontroller Data Sheet,
Malvino, A. P., (1992), Prinsip-prinsip Elektronika, alih bahasa, M.O.Tjia dan Barmawi, Erlangga, Jakarta
Owen Bishop, 2004, Dasar-dasar Elektronika, Jakarta: Gramedia.
Putra, A. E. 2002. Belajar Mikrokontroler AT89C51/52/55 (Teori dan Aplikasi). Yogyakarta : Gava Media.