RANCANG BANGUN JEMBATAN ANGKAT OTOMATIS
TUGAS AKHIR
BAGINDA AGUSTINUS SIMATUPANG
0 5 2 4 0 8 0 6 9
PROGRAM STUDI FISIKA INSTRUMENTASI D-3
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
RANCANG BANGUN JEMBATAN ANGKAT OTOMATIS
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Ahli Madya
BAGINDA AGUSTINUS SIMATUPANG
0 5 2 4 0 8 0 6 9
PROGRAM STUDI FISIKA INSTRUMENTASI D-3
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
ABSTRAK `
Perkembangan elektronika sangat menglobal termasuk di Indonesia. Beberapa teknologi sudah dapat dibuat di indonesia, tetapi masih banyak teknologi yang harus didatangkan dari luar negeri sehingga harganya menjadi sangat mahal. salah satu teknologi yang sangat mahal di Indonesia adalah teknologi instrumentasi.
Dari sekian banyak teknologi Instrumentasi, teknologi Instrumentasi mengenai prinsip jembatan angkat otomatis yang dapat membuka sekaligus menutup jembatan secara otomatis sangat banyak digunakan oleh negara-negara maju sebagai langkah untuk memperlancar lalu-lintas kapal serta meminimkan kecelakaan akibat menyangkutnya tiang kapal pada konstruksi jembatan. Sensor ini mempunyai banyak sekali kegunaannya seperti juga diaplikasikan sebagai pintu otomatis di plaza-plaza dan area perparkiran.
DAFTAR ISI
2.1.3 SFR (Register Fungsi Khusus) Pada Keluarga 51 9
2.1.4 Motor Langkah (Stepper) 15
2.1.5 Photodioda 17
2.1.6 Dioda Pemancar Infrare Merah (LED infra merah) 19
2.2 Perangkat Lunak 20
2.2.1 Bahasa Assembly MCS-51 20
2.2.2 Software 8051 Editor,Assembler,Simulator ( IDE ) 22 2.2.3 Software Downloader 23
Bab 3 Perancangan Alat dan Cara Kerja Rangkaian 25
3.1 Diagram Blok 25
3.2 Perancangan Power Supply ( PSA ) 26
3.3 Rangkaian Mikrokontroller AT89S51 27
3.4 Rangkaian Sensor 29
3.5 Rangkaian Pengendali Motor Stepper 32
3.6 Perancangan Rangkaian Buzzer 35
Bab 4 Pengujian Alat 37
4.1 Rangkaian Power Supply ( PSA ) 37
4.2 Pengujian Rangkaian Mikrokontroler AT89S51 37
4.3 Pengujian Rangkaian Driver Motor Stepper 39
4.4 Pengujian Rangkaian Sensor 43
5.1 Kesimpulan 47
5.2 Saran 48
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa yang telah memberi rahmat dan kasih karuniaNya, sehingga penulis dapat menyelesaikan penulisan laporan proyek ini selesai tepat pada waktunya.
Penulisan laporan proyek ini tidak terlepas dari bantuan dari berbagai pihak baik berupa dorongan semangat, materi dan sumbangan pikiran. Oleh karena itu pada kesempatan ini penulis mengucapkan terimakasih kepada semua pihak yang telah memberikan bantuan terutama kepada:
1. Bapak Dr. Eddy Marlinto, M.Sc, selaku Dekan Fakultas Matematika Dan Ilmu Pengetahuan Alam.
2. Bapak Drs. Syahrul Humaidi, M.Sc, selaku Ketua Program Study Fisika Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam.
3. Bapak DR. Marhaposan Situmorang, selaku Dosen pembimbing praktek proyek.
4. Staff dan Pegawai di Fakultas Matematika dan Ilmu Pengetahuan Alam khususnya program study Fisika Instrumentasi.
5. Teman-teman penulis khususnya mahasiswa Fisika Instrumentasi stambuk 2005 yang juga banyak memberikan semangat kepada penulis.
Penulis menyadari dalam pembuatan laporan dari perancangan proyek ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran yang dapat membangun dalam penyempurnaan laporan proyek ini. Akhir kata penulis mengucapkan banyak terimakasih kepada semua pihak yang membantu dalam menyelesaikan proyek ini. Semoga Tuhan Yesus selalu memberkati.
Medan, Juni 2008
ABSTRAK `
Perkembangan elektronika sangat menglobal termasuk di Indonesia. Beberapa teknologi sudah dapat dibuat di indonesia, tetapi masih banyak teknologi yang harus didatangkan dari luar negeri sehingga harganya menjadi sangat mahal. salah satu teknologi yang sangat mahal di Indonesia adalah teknologi instrumentasi.
Dari sekian banyak teknologi Instrumentasi, teknologi Instrumentasi mengenai prinsip jembatan angkat otomatis yang dapat membuka sekaligus menutup jembatan secara otomatis sangat banyak digunakan oleh negara-negara maju sebagai langkah untuk memperlancar lalu-lintas kapal serta meminimkan kecelakaan akibat menyangkutnya tiang kapal pada konstruksi jembatan. Sensor ini mempunyai banyak sekali kegunaannya seperti juga diaplikasikan sebagai pintu otomatis di plaza-plaza dan area perparkiran.
BAB 1
PENDAHULUAN
1.1. Latar Belakang Masalah
Kebutuhan manusia terhadap peralatan yang cerdas dan dapat bekerja secara otomatis semakin meningkat. Selain sistem kerjanya yang teliti dan tidak perlu dipantau setiap saat sebab peralatan otomatis dapat melakukan pekerjaannya sendiri. Jika menggunakan peralatan yang manual, maka satu peralatan harus dikendalikan oleh satu orang, ini sangatlah tidak efisien. Berbeda dengan peralatan otomatis, dimana satu orang dapat mengendalikan beberapa peralatan otomatis sekaligus.
Sebagai contoh, Salah satu peralatan otomatis yang sudah mulai banyak digunakan adalah pintu otomatis. Pintu otomatis ini banyak digunakan di plaza-plaza, mal-mal dan pusat-pusat perbelanjaan lainnya. Pintu otomatis tersebut akan terbuka jika ada orang yang akan masuk/keluar dari pintu tersebut, dan pintu akan menutup sendiri secara otomatis.
1.2. Rumusan Masalah
Berdasarkan uraian yang terdapat dalam latar belakang di atas, maka dalam tugas akhir ini akan dibuat sebuah simulasi jembatan angkat yang dapat membuka dan menutup sendiri secara otomatis, jika ada kapal yang akan lewat melaui jembatan tersebut maka jembatan akan membuka secara otomatis. Dan akan menutup kembali apabila kapal telah melewati jembatan tersebut. Perlu diketahui, bahwa penulis hanya membahas perangkat keras (hardware), sedangkan perangkat lunaknya (software) akan dibahas oleh rekan saya.
Pada alat ini akan digunakan sebuah mikrokontroler AT89S51, sebuah motor, dua buah sensor gerak dan rangkaian penguat sinyal. Mikrokontroler AT89S51 sebagai otak dari system yang berfungsi menerima sinyal dari sensor gerak dan menggerakkan motor untuk membuka/menutup jembatan. Motor yang akan digunakan adalah motor stepper yang dapat diatur perputarannya (dapat berputar kekanan/kekiri) sehingga dapat mengendalikan pergerakan jembatan (membuka/menutup) dan menutup palang jalan. Sensor gerak yang akan digunakan adalah beberapa buah pemancar infra merah dan sebuah photodioda.
dikirimkan oleh penguat sinyal inilah yang digunakan untuk mendeteksi keberadaan kapal yan akan melewati jembatan.
1.3 Tujuan Penulisan
Adapun tujuan penulisan tugas akhir ini adalah membuat sebuah simulasi jembatan otomatis yang dapat membuka dan menutup sendiri secara otomatis, jika ada kapal yang akan melewati jembatan tersebut dan akan menutup sendiri secara otomatis jika kapal telah melewati jembatan tersebut.
1.4 Batasan Masalah
Penulisan tugas akhir ini dibatasi pada:
1. Studi cara kerja rangkaian yang meliputi diagram blok dan menguraikan secara umum fungsi dari masing-masing komponen utama dalam blok tersebut
2. Sensor gerak menggunakan infra merah dan pototransistor. Digunakan dua buah sensor gerak yang satu akan ditempatkan di sebelah kanan sisi jembatan dan yang satunya lagi akan ditempatkan di kiri sisi jembatan 3. Mikrokontroler yang digunakan yaitu AT89S51, jadi hanya mikrokontroler
ini yang akan diuaraikan cara kerjanya.
4. untuk mengangkat dan menutup palang jalan digunakan motor stepper.
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana prinsip kerja dari simulasi jembatan angkat ,maka penulis menulis laporan ini sebagai berikut:
BAB 1. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penulisan, batasan masalah, serta sistematika penulisan.
BAB 2. LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian Teori pendukung itu antara lain tentang mikrokontroler AT89S51, cara kerja dari pemancar infra merah dan potodioda dan rangkaian penerimanya.
BAB 3. ANALISA RANGKAIAN DAN KERJA SISTEM
Analisa rangkaian dan sistem kerja, dalam bab ini dibahas tentang sistem kerja per-blok diagram dan sistem kerja keseluruhan.
BAB 4. PENGUJIAN ALAT
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai rangkaian-rangkaian yang digunakan,.
BAB 5. KESIMPULAN DAN SARAN
BAB 2
LANDASAN TEORI
2.1 Perangkat Keras.
2.1.1 Arsitektur Mikrokontroler AT89S51
Mikrokontroler, sebagai suatu terobosan teknologi mikrokontoler dan mikrokomputer, hadir memenuhi kebutuhan pasar(market need)dan teknologi baru. Sebagai teknologi baru, yaitu teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah (dibandingkan mikroprosesor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat bantu dan mainan yang lebih canggih.
yang harus dipasang disamping (atau di belakang) mesin permainan yang bersangkutan.
Selain system tiket, kita juga dapat menjumpai aplikasi mikrokontroler dalam bidang pengukuran jarak jauh atau yang dikenal dengan system telemetri. Misalnya pengukuran disuatu tempat yang membahayakan manusia, maka akan lebih nyaman jika dipasang suatu system pengukuran yang bisa mengirimkan data lewat pemancar dan diterima oleh stasiun pengamatan dari jarak yang cukup aman dari sumbernya. Sistem pengukuran jarak jauh ini jelas membutuhkan suatu system akuisisi data sekaligus system pengiriman data secara serial (melalui pemancar), yang semuanya itu bisa diperoleh dari mikrokontroler yang digunakan.
Tidak seperti system komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan RAM-nya dan ROM. Pada system computer perbandingan RAM dan ROM-nya besar, artinya program-program pengguna disimpan dalam ruang RAM yang relative besar, sedangkan rutin-rutin antarmuka perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program control disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat penyimpanan sementara, termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan.
Mikrokontrol AT89S51 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1 kristal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 Kilo Ohm dipakai untuk membentuk rangkaian reset. Dengan adanya rangkaian reset ini AT89S51 otomatis direset begitu rangkaian menerima catu daya. Kristal dengan frekuensi maksimum 24 MHz dan kapasitor 30 piko-Farad dipakai untuk melengkapi rangkaian oscilator pembentuk clock yang menentukan kecepatan kerja mikrokontroler.
Memori merupakan bagian yang sangat penting pada mikrokontroler. Mikrokontroler memiliki dua macam memori yang sifatnya berbeda.
Read Only Memory(ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dangan keperluannya, dalam susunan MCS-51 memori penyimpanan progam ini dinamakan sebagai memori progam.
Random Access Memori (RAM) isinya akan sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat progam bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
Violet Eraseable Progamble ROM) yang kemudian dinilai mahal dan ditinggalkan setelah adaflash PEROMyang harganya jauh lebih murah.
Jenis memori yang dipakai untuk Memori Program AT89S51 adalah Flash PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat bantuan alat yang dinamakan sebagaiAT89S51 Flash PEROM Programmer.
Memori Data yang disediakan dalam chip AT89S51 sebesar 128 byte, meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu sudah cukup.
Sarana Input/Ouput yang disediakan cukup banyak dan bervariasa. AT89S51 mempunyai 32 jalur Input/Ouput. Jalur Input/Ouput paralel dikenal sebagai Port 1 (P1.0..P1.7) dan Port 3 (P3.0..P3.5 dan P3.7).
AT89S51 dilengkapi UART (Universal Asyncronous Receiver/Transmiter)
yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk komunikasi data seri (RXD dan TXD) diletakan berhimpitan dengan P1.0 dan P1.1 di kaki nomor 2 dan 3, seningga kalau sarana input/ouput yang bekerja menurut fungsi waktu. Clock
penggerak untaian pencacah ini bisa berasal dari oscillator kristal atau clock yang diumpan dari luar lewat T0 dan T1. T0 dan T1 berhimpitan dengan P3.4 dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur input/ouput parelel kalau T0 dan T1 dipakai.
berhimpitan dengan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur input/output parelel kalau INT0 dan INT1 dipakai untuk menerima sinyal interupsi.
Port1 dan 2, UART, Timer 0,Timer 1 dan sarana lainnya merupakan register yang secara fisik merupakan RAM khusus, yang ditempatkan di Special Functoin Regeister (SFR).
2.1.3 SFR (Register Fungsi Khusus ) Pada Keluarga 51
Sekumpulan SFR atau Special Function Register yang terdapat pada Mikrokontroler Atmel Keluarga 51 ditunjukan pada gambar I.01, pada bagian sisi kiri dan kanan dituliskan alamat-alamatnya dalam format heksadesimal.
Tidak semua alamat pada SFR digunakan, alamat-alamat yang tidak digunakan diimplementasikan pada chip. Jika dilakukan usaha pembacaan pada alamat-alamat yang tidak terpakai tersebut akan menghasilkan data acak dan penulisannya tidak menimbulkan efek sama sekali. Pengguna perangkat lunak sebaiknya jangan menuliskan 1 pada lokasi-lokasi tak bertuan tersebut, karena dapat digunakan untuk mikrokontroler generasi selanjutnya. Dengan demikian, nilai-nilai reset atau non-aktif dari bit-bit baru ini akan selalu O dan nilai aktifnya adalah 1 . Berikut akan dijelaskan secara singkat SFR-SFR beserta fungsinya:
Tanda ( ) untuk SFR yang dijumpai di keluarga 51 dengan 3 Timer
C8 (T2CON) (T2MOD) (RCAP2L) (RCAP2H) (TL2) (TH2) CF
C0 C7
88 TCON TMOD TLO TL1 THO TH1 8F
80 PO SP DPL DPH PCON 87
Akumulator
ACC atau akumulator yang menempati lokasi E 0h digunakan sebagai register untuk penyimpanan data sementara, dalam program, instruksi mengacunya sebagai register A (bukan ACC).
Register B
Register B (lokasi D 0h) digunakan selama operasi perkalian dan pembagian, untuk instruksi lain dapat diperlakukan sebagai registerscratch pad( papan coret-coret ).
Program Status Word (PSW)
Register PSW (lokasiD 0h)mengandung informasi status program.
Register SP atauStack Pointer(lokasi8 1h)merupakan register dengan panjang 8-bit, digunakan dalam proses simpan menggunakan instruksi PUSH dan CALL. Walau
Stack bisa menempati lokasi dimana saja dalam RAM, register SP akan selalu diinisialisasi ke07hsetelah adanya reset, hal ini menyebabkan stackberawal di lokasi
08h.
Data Pointer
Register Data Pointer atau DPTR mengandung DPTR untuk byte tinggi (DPH) dan byte rendah (DPL) yang masing-masing berada dilokasi 83h dan82h, bersama-sama membentuk register yang mampu menyimpan alamat 16-bit. Dapat dimanipulasi sebagai register 16-bit atau ditulis dari/ke port, untuk masing-masing Port 0,Port 1, Port2 dan Port 3.
Serial Data Buffer
SBUF atauSerial Data Buffer (lokasi 99h) sebenarnya terdiri dari dua register yang terpisah, yaitu register penyangga pengirim(transmit buffer)dan penyangga penerima
(receive buffer). Pada saat data disalin ke SBUF, maka data sesungguhnya dikirim ke penyangga pengirim dan sekaligus mengawali transmisi data serial. Sedangkan pada saat data disalin dari SBUF, maka sebenarnya data tersebut berasal dari penyangga penerima.
Time Register
Pasangan register (TH0, TL0) dilokasi 8Ch dan 8Ah,(TH1, TL1) dilokasi 8Dh dan 8Bh serta (TH2, TL2) dilokasi CDh dan CCH merupakan register-register pencacah 16-bit untuk masing-masing Timer 0, Timern 1 dan Timer 2.
Pasangan register (RCAP2H, RCAP21) yang menempati lokasi CBh dan CAh merupakan register capture untuk mode Timer 2 capture. Pada mode ini, sebagai tanggapan terjadinya suatu transisi sinyal di kaki (pin) T2EX (pada AT89C52/55), TH2 dan TL2 disalin masing-masing ke RCAP2H dan RCAP2L. Timer 2 juga memiliki mode isi-ulang-otomatis 16-bit dan RCAP2H serta RCAP2L digunakan untuk menyimpan nilai isi-ulang tersebut.
Control Register
Register-register IP, IE, TMOD, TCON, T2CON, T2MOD, SCON dan PCON berisi bit-bit control dan status untuk system interupsi, pencacah/pewaktu dan port serial. Berikut ini merupakan spesifikasi dari IC AT89C51 :
Kompatible dengan produk MCS-51
Empat K byte In-Sistem Reprogammable Flash Memory
Daya tahan 1000 kali baca/tulis
Fully Static Operation : 0 Hz sampai 24 MHz
Tiga level kunci memori progam
128x8 bit RAM internal
32 jalur I/O
Tiga 16 bit Timer/Counter
Enam sumber interupt
Gambar 2.1. IC Mikrokontroler AT89S51
Deskripsi pin-pin pada mikrokontroler AT89S51 :
VCC (Pin 40)
Suplai tegangan
GND (Pin 20)
Ground
Port 0 (Pin 39-Pin 32)
Port 2 (Pin 21 pin 28)
Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengaksememori secara 16 bit. Pada saat mengakses memori 8 bit, port ini akan mengeluarkan isi dari P2 special function register. Port ini mempunyai internal pull updan berfungsi sebagai input dengan memberikan logika 1. Sebagai output, port ini dapat memberikan output sink keempat buah input TTL.
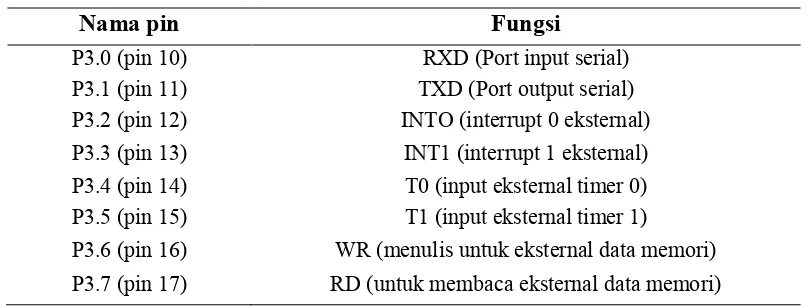
Port 3 (Pin 10 pin 17)
Port 3 merupakan 8 bit port I/O dua arah dengan internal pullup. Port 3 juga mempunyai fungsi pin masing-masing, yaitu sebagai berikut :
Tabel 2.2. Fungsi pin AT89S51
Nama pin Fungsi
P3.0 (pin 10) RXD (Port input serial) P3.1 (pin 11) TXD (Port output serial) P3.2 (pin 12) INTO (interrupt 0 eksternal) P3.3 (pin 13) INT1 (interrupt 1 eksternal) P3.4 (pin 14) T0 (input eksternal timer 0) P3.5 (pin 15) T1 (input eksternal timer 1)
P3.6 (pin 16) WR (menulis untuk eksternal data memori) P3.7 (pin 17) RD (untuk membaca eksternal data memori)
RST (pin 9)
Reset akan aktif dengan memberikan input high selama 2 cycle.
Address latch Enable adalah pulsa output untuk me-latch byte bawah dari alamat selama mengakses memori eksternal. Selain itu, sebagai pulsa input progam (PROG) selama memprogam Flash.
PSEN (pin 29)
Progam store enable digunakan untuk mengakses memori progam eksternal.
EA (pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan progam yang ada pada memori eksternal setelah sistem direset. Jika kondisi high, pin ini akan berfungsi untuk menjalankan progam yang ada pada
tempat yang tepat di atas jalur atau track pada cakram, untuk head tersebut di hubungkan dengan sebuah motor langkah.
Aplikasi penggunaan motor langkah dapat juga di jumpai dalam bidang industri atau untuk jenis motor langkah kecil dapat di gunakan dalam perancangan suatu alat mekatronik atau robot. Motor langkah berukuran besar digunakan, misalnya, dalam proses pengeboran logam yang menghendaki ketepatan posisi pengeboran, dalam hal ini di lakukan oleh sebuah robot yang memerlukan ketepatan posisi dalam gerakan lengannya dan lain-lain.
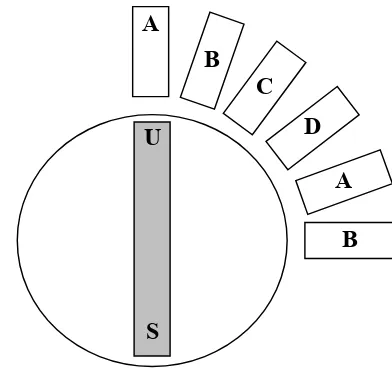
Pada gambar di bawah ditunjukkan dasar susunan sebuah motor langkah (stepper).
Gambar 2.2 Diagram motor langkah (stepper)
Magnet permanen N-S berputar kearah medan magnet yang aktif. Apabila kumparan stator dialiri arus sedemikian rupa, maka akan timbul medan magnet dan rotor akan berputar mengikuti medan magnet tersebut.setiap pengalihan arus ke kumparan berikutnya menyebabkan medan magnet berputar berputar menurut suatu sudut tertentu, biasanya informasi besar sudut putar tertulis pada badan motor langkah yang bersangkutan. Jumlah keseluruhan pengalihan menentukan sudut perputaran motor.Jika pengalihan arus di tentukan, makarotorakan berhenti pada posisi terakhir.
Jika kecepatan pengalihan tidak terlalu tinggi, maka slip akan dapat dihindari. Sehingga tidak di perlukan umpan balik(feedback)pada pengendalian motor langkah.
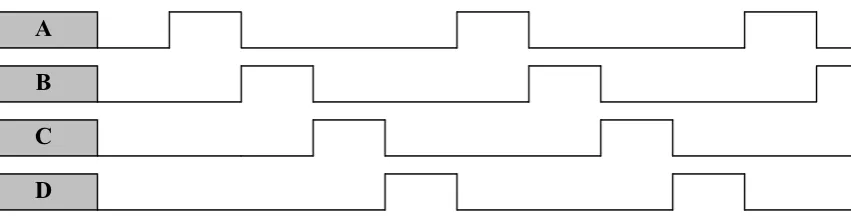
Motor langkah yang akan di gunakan memiliki 4 fase (pole atau kutub), pengiriman pulsa dari mikrokontroler ke rangkaian motor langkah dilakukan secara bergantian, masing-masing 4 data (sesuai dengan jumlah phase-nya), sebagian di tunjukkan pada gambar di bawah ini.
Gambar 2.3 Pemberian data/pulsa pada motor stepper
Pada saat yang sama ,untuk tiap motor langkah, tidak boleh ada 2 (dua) masukan atau lebih yang mengandung pulsa sama dengan 1 (high), atau dengan kata lain, pada suatu saat hanya sebuah masukan yang bernilai 1 (satu) sedangkan lainnya bernilai 0 (nol).
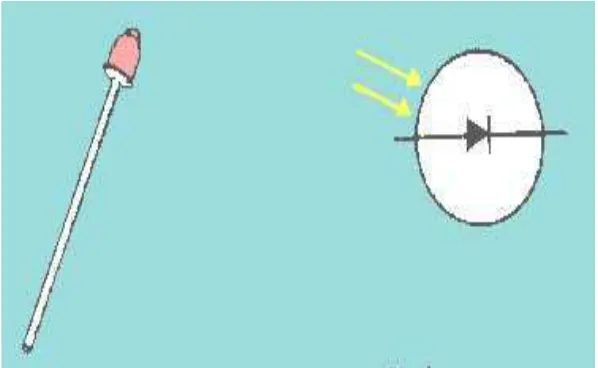
2.1.5 Photodioda
Pengertian : piranti semikonduktor dengan struktur p-n atau p-i-n untuk mendeteksi cahaya. Potodioda biasanya digunakan untuk mendeteksi cahaya. Potodioda adalah piranti semikonduktor yang mengandung sambungan p-n, dan biasanya terdapat lapisan intrinsik antara lapisan n dan p. Piranti yang memiliki lapisan intrinsik disebut p-i-n atai PIN potodioda. Cahaya diserap di daerah pengambungan atau daerah
intrinsik menimbulkan pasangan elektron-hole, kebanyakan pasangan tersebut menghasilkan arus yang berasal dari cahaya.
Mode operasi
Potodioda dapat dioperasikan dalam 2 mode yang berbeda:
1. Mode potovoltaik: seperti solar sel, penyerapan pada potodioda menghasilkan tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dari tenaga cahaya ini sedikit tidak linier, dan range perubahannya sangat kecil. 2. mode potokonduktivitas : disini, potodioda diaplikasikan sebagai tegangan
revers (tegangan balik) dari sebuah dioda (yaitu tegangan pada arah tersebut pada dioda tidak akan menhantarkan tanpa terkena cahaya) dan pengukuran menghasilkan arus poto. ( hal ini juga bagus untuk mengaplikasikan tegangan mendekati nol). Ketergantungan arus poto pada kekuatan cahaya dapat sangat linier .
Karakteristik bahan potodioda:
1. Silikon (Si) : arus lemah saat gelap, kecepatan tinggi, sensitivitas yang bagus antara 400 nm sampai 1000 nm ( terbaik antara 800 sampai 900 nm).
2. Germanium (Ge): arus tinggi saat gelap, kecepatan lambat, sensitivitas baik antara 600 nm sampai 1800 nm (terbaik 1400 sampai 1500 nm).
3. Indium Gallium Arsenida (InGaAs): mahal, arus kecil saat gelap, kecepatan tinggi sensitivitas baik pada jarak 800 sampai 1700nm (terbaik antara 1300 sampai 1600nm)
Gambar 2.4 Photodioda (www.google.com).
2.1.6 Dioda Pemancar Cahaya Infra Merah (LED infra Merah)
LED adalah dioda yang menghasilkan cahaya saat diberi energi listrik. Dalam bias maju sambungan p-n terdapat rekombinasi antara elektron bebas dan lubang (hole) photodioda. Energi ini tidak seluruhnya diubah kedalam bentuk energi cahaya atau photon melainkan dalam bentuk panas sebagian.
Proses pemancara cahaya akibat adanya energi listrik yang diberikan terhadap suatu bahan disebut dengan sifat elektroluminesensi. Material lain misalnya Galium Arsenida Pospat (GaAsP) atau Galium Pospat (GaP): photon energi cahaya dipancarkan untuk menghasilkan cahaya tampak. Jenis lain dari LED digunakan untuk menghasilkan energi tidak tampak seperti yang dipancarkan oleh pemancar laser atau inframerah.
330
VCC 5V
330
Gambar 2.5 Simbol dan rangkaian dasar sebuah LED
Pemancar inframerah adalah dioda solid stateyang terbuat dari bahan Galium Arsenida (GaAs) yang mampu memancarkan fluks cahaya ketika dioda ini dibias maju. Bila diberi bias maju elektron dari daerah-nakan menutup lubang elektron yang ada didaerah-p. Selama proses rekombinasi ini, energi dipancar keluar dari permukaan
pdanndalam bentuk photon. Photon-photon yang dihasilkan ini ada yang diserap lagi dan ada yang meninggalkan permukaan dalam betuk radiasi energi.
Perangkat Lunak
2.2.1 Bahasa Assembly MCS-51
Sekilas untuk perangkat lunak, bahasa yang digunakan untuk memprogram IC mikrokontroler AT89S51 adalah bahasa assembly untuk MCS-51. angka 51 merupakan jumlah instruksi pada bahasa ini hanya ada 51 instruksi. Dari 51 instruksi, yang sering digunakan orang hanya 10 instruksi. Instruksi instruksi tersebut antara lain :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk mengurangi nilai register tertentu dengan 1 dan lompat jika hasil pengurangannya belum nol.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu
4. Instruksi RET
Instruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin pemanggil setelah instruksiACALLdilaksanakan
5. Instruksi JMP (Jump)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu.
6. InstruksiJB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika high (1).
7. InstruksiJNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika Low (0).
8. Instruksi CJNZ (Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register dengan suatu nilai tertentu.
9. InstruksiDEC (Decreament)
10. InstruksiINC (Increament)
Instruksi ini merupakan perintah untuk menambahkan nilai register yang dimaksud dengan 1.
11. Dan lain sebagainya
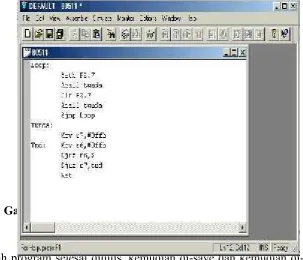
2.2.2 Software 8051 Editor, Assembler, Simulator (IDE)
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan pada sebuah editor, yaitu 8051 Editor, Assembler, Simulator (IDE). Tampilannya seperti gambar dibawah ini.
Gambar 2.6 8051 Editor, Assembler, Simulator (IDE)
Software 8051IDE ini berfungsi untuk merubah program yang kita tuliskan ke dalam bilangan heksadesimal, proses perubahan ini terjadi pada saat peng-compile-an. Bilangan heksadesimal inilah yang akan dikirimkan ke mikrokontroller.
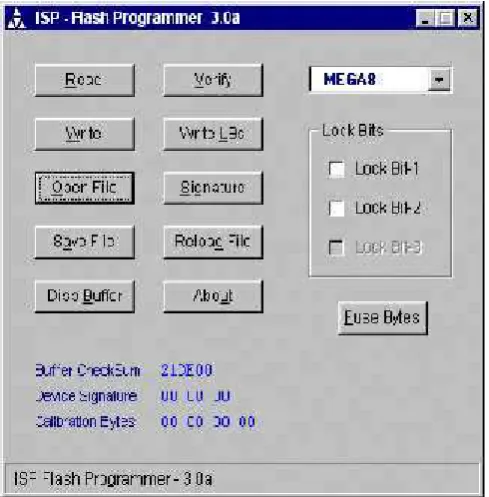
2.2.3.Software Downloader
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroller digunakan software ISP- Flash Programmer 3.0a seperti pada gambar 2.7 yang dapat didownload dari internet. Tampilannya seperti gambar di bawah ini
Gambar 2.7 ISP- Flash Programmer
BAB 3
PERANCANGAN ALAT DAN CARA KERJA RANGKAIAN
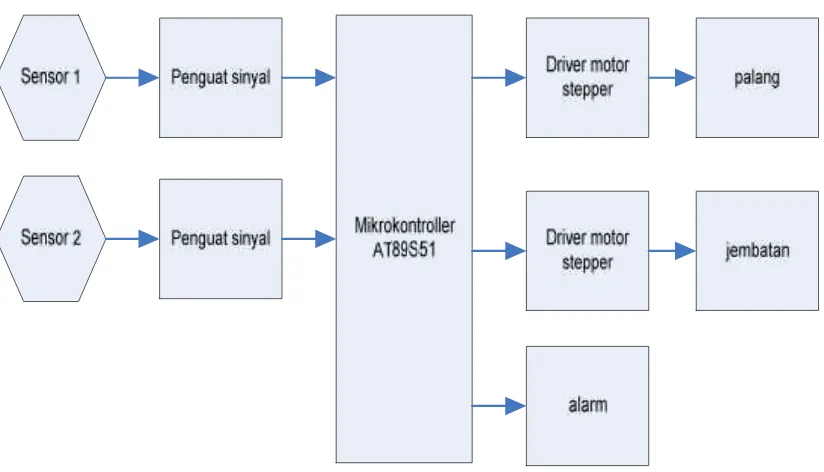
3.1 Diagram blok
Gambar 3.1. Diagaram blok
Mikrokontroller AT89S51 yang merupakan otak dari keseluruhan syste berfungsi utnuk mengolah semua data yang masuk. Driver motor stepper berfungsi untuk mengendalikan motor stepper. Motor steper digunaka untuk mengangkat jembatan dan menutup palang jalan. Alarm berfungsi untuk memberitahukan bahwa kapalsedang melewati jembatan.
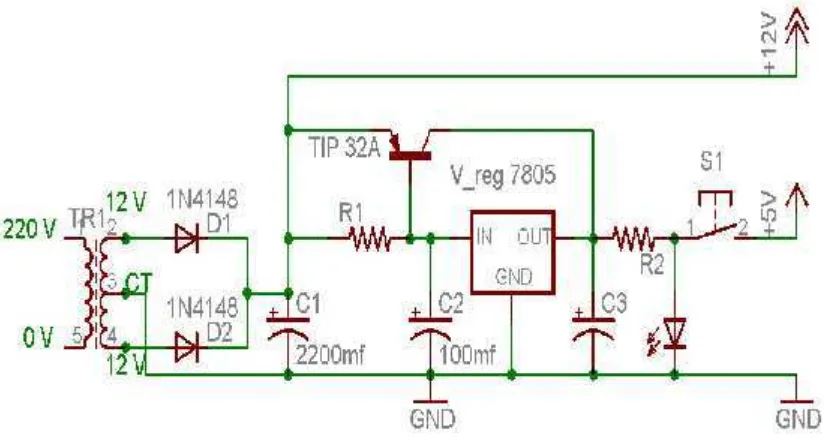
3.2 Perancangan Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian dan tegangan 12 volt digunakan untuk mensupplay tegangan ke motor stepper rangkaian kaian power supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2 Rangkaian Power Supplay (PSA)
menggunakan dua buah dioda, selanjutnya 12 volt DC akan diratakan oleh kapasitor 2200 F. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
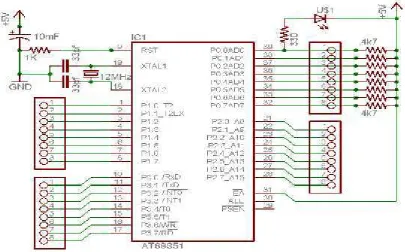
3.3 Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh system yang ada. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Pin 31 External Access Enable (EA) diset high (H). Ini dilakukan karena mikrokontroller AT89S8253 tidak menggunakan memori eskternal. Pin 18 dan 19 dihubungkan ke XTAL 12 MHz dan capasitor 33 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroller AT89S8253 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif tinggi). Pulsa transisi dari rendah ke tinggi akan me-reset mikrokontroller ini. Pin 32 sampai 39 adalah Port 0 yang merupakan saluran/bus I/O 8 bit open collector dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama adanya akses ke memori program eksternal.
Pada port 0 ini masing masing pin dihubungkan dengan resistor 4k7 ohm. Resistor 4k7 ohm yan dihubungkan ke port 0 befungsi sebagai pull up( penaik tegangan ) agar output dari mikrokontroller dapat mntrigger transistor. Pin 1 sampai 8 adalah port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10 sampai 17 adalah port 3. Pin 39 yang merupakan P0.0 dihubungkan dengan sebuah resistor 330 ohm dan sebuah LED. Ini dilakukan hanya untuk menguji apakah rangkaian minimum mikrokontroller AT89S8253 sudah bekerja atau belum.
3. 4 Rangkaian Sensor
Untuk dapat mendeteksi kapal yang lewat, maka pada alat ini dilengkapi dengan 2 buah sensor gerak. Ke-2 sensor gerak ini mempunyai rangkaian yang sama, hanya penempatannya saja yang berbeda.
Masing-masing sensor menggunakan 1 buah pemancar infra merah dan sebuah potodioda. Sensor ini memanfaatkan pantulan dari pemancar infra merah yang diterima oleh potodioda. Digunakan 2 buah pemancar infra merah pada masing-masing sensor bertujuan agar sinyal pantulan semakin kuat, sehingga posisi sensor tidak terlalu dekat.
Rangkaian pemancar infra merah tampak seperti gambar di bawah ini:
Gambar 3.4. Rangkaian Pemancar infra merah (www.google.com).
mengirimkan sinyal low dan mengambil tindakan untuk mengangkat dan menurunka jembatan.
Pada rangkaian di atas digunakan 2 buah LED infra merah yang diparalelkan, dengan demikian maka intensitas yang dipancarkan oleh infra merah semakin kuat, karena merupakan gabungan dari buah LED infra merah. Resistor yang digunakan adalah 100 ohm sehingga arus yang mengalir pada masing-masing LED infra merah adalah sebesar: pancaran infra merah akan semakin kuat, yang menyebabkan jarak pantulannya akan semakin jauh.
Pantulan dari sinar infra merah akan diterima oleh fotodioda, kemudian akan diolah oleh rangkaian penerima agar menghasilkan sinyal tertentu, dimana jika fotodioda menerima pantulan sinar infra merah maka output dari rangkaian penerima ini akan mengeluarkan logika low (0), namun jika fotodioda tidak menerima pantulan sinar infra merah, maka output dari rangkaian penerima akan mengeluarkan logika high (1).
Gambar 3.5. Rangkaian Penerima sinar infra merah
Fotodioda dioperasikan pada bias balik, dimana fotodioda ini akan memiliki hambatan sekitar 15 s/d 20 Mohm jika tidak terkena sinar infra merah, dan hambatannya akan berubah menjadi sekitar 80 s/d 300 Kohm jika terkena sinar infra merah tergantung dari besarnya intensitas yang mengenainya. Semakin besar intensitasnya, maka hambatannya semakin kecil.
Pada rangkaian di atas, output dari fotodioda diumpankan ke basis transistor tipe NPN C945, ini berarti untuk membuat transistor tersebut saturasi maka tegangan yang keluar dari fotodioda harus lebih besar dari 0,7 volt. Syarat ini akan terpenuhi jika fotodioda mendapatkan sinar infra merah. Analisanya sebagai berikut:
Vout akan diumpankan ke basis dari transistor C945, maka transistor tidak saturasi. Jika ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda 300 Kohm.
Vout akan diumpankan ke basis transistor C945, karena tegangannya lebih besar maka transistor akan saturasi.
Emiter transistor C945 diinputkan ke Op Amp LM 358 untuk diperkuat. LM358 merupakan IC penguat dengan dua Op Amp. Pada Op Amp pertama tegangan input akan diperkuat sampai maksimal 100 kali penguatan.
Penguatan ini dapat diatur dengan mengatur hambatan pada potensio. Output Op Amp telah diperkuat sampai maksimum 100 kali penguatan. Dengan demikian penguatan dapat diatur sesuai dengan yang dikehendaki.
LED ini akan menyala jika sensor menerima sinar infra merah, dan akan mati jika sensor tidak menerima sinar infra merah.
3.5 Rangkaian Pengendali Motor Stepper
Gambar 3.6. Rangkaian pengendali motor stepper
Driver ini berfungsi untuk memutar motor stepper searah dengan jarum jam atau berlawanan arah dengan jarum jam. Rangkaian ini akan dikendalikan oleh mikrokontroler AT89S51. Jadi dengan memberikan sinyal high secara bergantian ke input dari rangkaian driver motor stepper tersebut, maka pergerakan motor stepper sudah dapat dikendalikan oleh mikrokontroler AT89S51.
Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat keluaran, dimana masing-masing masukan dihubungkan dengan mikrokontroler AT89S51 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal high (1) secara bergantian pada ke-4 masukannya.
Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122 mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktip dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan secara bergantian pada input dari driver motor stepper, maka motor stepper akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya, maka logika high (1) pada input driver motor stepper harus diberikan secara bergantian dengan arah yang berlawanan dengan sebelumnya.
Rangkaian buzzer ini berfungsi untuk memberikan peringatan berupa nada alarm apabila ada kapal yang lewat. Rangkaiannya seperti gambar di bawah ini:
Gambar 3.7. Rangkaian buzzer
Pada alat ini, alarm yang digunakan adalah buzzer 5 volt. Buzzer ini akan berbunyi jika positipnya dihubungkan ke sumber tegangan positip dan negatipnya negatipnya dihubungkan ke ground.
Pada rangkaian di atas transistor berfungsi sebagai saklar elektronik yang dapat menghidupkan dan mematikan buzzer. Dari gambar dapat dilihat bahwa negatip buzzer dihubungkan ke kolektor dari transistor NPN (2SC945), ini berarti jika transistor dalam keadaan aktip maka kolektor akan terhubung ke emitor dimana emitor langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mengakibatkan buzzer berbunyi. Sebaliknya jika transistor tidak aktip, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 5 volt, keadaan ini menyebabkan buzzer mati.
BAB 4
PENGUJIAN ALAT
4.1 Pengujian Rangkaian Power Supplay (PSA)
Pengujian pada bagian rangkaian power supplay ini dapat dilakukan dengan mengukur tegangan keluaran dari rangkaian ini dengan menggunakan volt meter digital. Dari hasil pengujian diperoleh tegangan keluaran sebesar + 5,1 volt.dan +12,2 volt Tegangan ini dipergunakan untuk mensupplay tegangan ke seluruh rangkaian. Mikrokontroler AT89S51 dapat bekerja pada tegangan 4,0 sampai dengan 5,5 volt, sehingga tegangan 5,1 volt ini cukup untuk mensupplay tegangan ke mikrokontroler AT89S51. Dengan demikian rangkaian ini sudah dapat bekerja dengan baik.
4.2 Pengujian Rangkaian Mikrokontroller AT89S51
Djnz r6,$
Djnz r7,tnd
Ret
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke P0.0 selama ± 0,13 detik kemudian mematikannya selama ± 0,13 detik secara terus menerus. Perintah Setb P0.0 akan menjadikan P0.0 berlogika high yang menyebabkan LED menyala. Acall tunda akan menyebabkan LED ini hidup selama beberapa saat. Perintah Clr P0.0 akan menjadikan P0.0 berlogika low yang menyebabkan LED akan mati. Perintah Acall tunda akan menyebabkan LED ini mati selama beberapa saat. Perintah Sjmp Loop akan menjadikan program tersebut berulang, sehingga akan tampak LED tersebut tampak berkedip.
Lamanya waktu tunda dapat dihitung dengan perhitungan sebagai berikut : Kristal yang digunakan adalah kristal 12 MHz, sehingga 1 siklus mesin
membutuhkan waktu = 12 1
12MHz mikrodetik.
Mnemonic Siklus Waktu Eksekusi
MOV Rn,#data 2 2 x 1 d = 2 d
DJNZ 2 2 x 1 d = 2 d
Tunda:
mov r7,#255 2
Tnd: mov r6,#255 2
djnz r6,$ 255 x 2 = 510 x 255 = 130.054 = 130.058 = 130.059 d
djnz r7,loop3 2
djnz r2,loop8 2
ret 1
Jadi waktu yang dibutuhkan untuk mengerjakan program di atas adalah 130.059 detik
atau 0,130059 detik dan dapat dibulatkan menjadi 0,13 detik.
Jika program tersebut diisikan ke mikrokontroller AT89S51, kemudian mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka rangkaian minimum mikrokontroller AT89S51 telah bekerja dengan baik
4.3 Pengujian Rangkaian Driver Motor Stepper
Gambar 4.1 Rangkaian driver motor stepper
Gambar 4.1 Rangkaian Driver Motor Stepper
Rangkaian ini terdairi dari 4 buah transistor NPN TIP 122. Masing-masing transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler AT89S51. Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktip dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan secara bergantian pada input dari driver motor stepper, maka motor stepper akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya, maka logika high (1) pada input driver motor stepper harus diberikan secara bergantian dengan arah yang berlawanan dengan sebelumnya.
Program yang diberikan pada driver motor stepper untuk memutar motor stepper adalah sebagai berikut :
sekarang nilai port 0 adalah 11h. ini berarti P0.0 dan P0.4 mendapatkan logika high sedangkan yang lainnya mendapatkan logika low, seperti table di bawah ini,
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 0 1 0 0 0 1
Program dilanjutkan dengan memanggil rutin tunda. Lamanya tunda akan mempengaruhi kecepatan perputaran motor. Semakin lama maka tunda, maka perputaran motor akan semakin lambat. Perintah berikutnya adalah Rl a,perintah ini akan memutar nilai yang ada pada accumulator (a), seperti tampak pada table di bawah ini, maka nilai pada accumulator (a) akan merubah menjadi 22h. Kemudian program akan melihat apakah kondisi sensor buka pintu dalam keadaan high (1) atau low (0). Jika high (1),
Nilai yang ada pada accumulator (a), akan kembali diisikan ke port 0, maka nilai di port 0 akan berubah menjadi 22h, ini berarti P0.1 dan P0.5 mendapatkan logika high sedangkan yang lainnya mendapatkan logika low, seperti table di bawah ini,
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 1 0 0 0 1 0
mendapatkan nilai high (1) secara bergantian. Hal ini menyebabkan motor stepper akan berputar membuka pintu.Hal yang sama juga berlaku ketika motor berputar kaearah sebaliknya, perbedaannya hanya pada perintah rotate. Jika pada perintah berlawanan arah jarum jam digunakan rotate left ( Rl ), maka pada perintah searah jarum jam digunakan perintah rotate right ( Rr). Perputaran perintah Rr diperlihatkan pada table berikut,
Pengujian pada rangkaian sensor ini dapat dilakukan dengan cara menghubungkan rangkaian ini dengan sumber tegangan 5 volt, kemudian meletakkan potodioda dan infra merah secara berhadapan. Ketika diletakkan secara berhadapan, maka pancaran sinar infra merah akan mengenai potodioda, sehingga menyebabkan LED indikator pada rangkaian penerima akan menyala, dan tegangan output rangkaian sebesar 0,2 volt. Namun ketika antara infra merah dan potodioda diberi suatu penghalang, yang menyebabkan pancaran infra merah tidak mengenai potodioda, hal ini menyebabkan LED indikator pada rangkaian penerima tidak menyala dan tegangan output dari rangkaian ini sebesar 4,8 volt.
sensor, maka mikrokontroler harus diprogram untuk untuk dapat mengecek sinyal apa yang dikirimkan oleh sensor. Jika sinyal yang dikirimkan adalah sinyal high (1), berarti tidak ada kapal yang lewat, namun jika sinyal yang dikirimkan adalah sinyal low, maka ini berarti ada kapal yang lewat. Program untuk mendeteksi pengiriman sinyal dari rangkaian sensor ini adalah,
sensor_masuk Bit P1.3
\
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
1. Motor stepper adalah sebuah penggerak yang memiliki keakuratan yang baik. Karena dapat diatur sudut dan rotasi perputaran. Sehingga alat ini sangat dibutuhkan apabila dikehendaki jumlah perputaran yang tepat. Misalnya pada disk drive atau motor printer.
5.2. Saran
DAFTAR PUSTAKA
Agfianto, Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi, Edisi Kedua, Penerbit: Gava Media, Yogyakarta, 2004.
Clayton George, Winder Steve, Operational Amplifiers, Edisi Kelima, Penerbit Erlangga, Jakarta, 2004.
Malvino, Albert paul, Prinsip-prinsip Elektronika, Jilid 1 & 2, Edisi Pertama, Penerbit: Salemba Teknika, Jakarta, 2003.