ASPEK KESELAMATAN DITINJAU DARI STABILITAS
KAPAL DAN REGULASI PADA KAPAL POLE AND LINE
DI BITUNG, SULAWESI UTARA
YULI PURWANTO
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
*
Dengan ini saya menyatakan bahwa tesis berjudul Aspek Keselamatan ditinjau dari Stabilitas Kapal dan Regulasi pada Kapal Pole and Line di Bitung, Sulawesi Utara adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, November 2014
Yuli Purwanto
RINGKASAN
YULI PURWANTO. Aspek Keselamatan ditinjau dari Stabilitas Kapal dan Regulasi pada Kapal Pole and Line di Bitung, Sulawesi Utara. Dibimbing oleh BUDHI HASCARYO ISKANDAR, MOHAMMAD IMRON dan BUDY WIRYAWAN.
Penangkapan ikan adalah salah satu pekerjaan beresiko sehingga faktor keselamatan diatas kapal merupakan hal penting yang harus diperhatikan. Penyebab kecelakaan kapal ikan adalah kualitas stabilitas kapal yang kurang baik, ini karena umumnya kapal-kapal ikan tradisional dibangun tanpa perencanaan dan perhitungan desain. Kapal-kapal yang dalam pengoperasian alat tangkapnya mengejar gerombolan ikan dan ditambah lagi dengan banyaknya awak diatas kapal untuk kegiatan memancing seperti kapal pole and line, maka kualitas stabilitas yang baik pada kapal merupakan hal utama yang harus diperhatikan. Armada kapal pole and line di Bitung cukup bervariasi dan kapal-kapal tersebut dibangun digalangan tradisional. Pembangunan kapal pole and line yang tidak berdasarkan perhitungan dan perencanaan desain, sehingga kualitas stabilitas kapal perlu dikaji.
Pengkajian regulasi yang relevan terkait dengan peningkatan keselamatan kapal dan awak kapal penangkap ikan perlu dilakukan untuk mengetahui sejauh mana tanggung jawab pemerintah dan sejauh mana penerapan aturan yang ada.
Tujuan umum dari penelitian ini adalah mengenai aspek keselamatan pada kapal pole and line, sementara tujuan khususnya adalah : (1) mengkaji dan menganalisis untuk mendapatkan kualitas stabilitas kapal pole and line dan (2) mengidentifikasi dan mengkaji tinjauan regulasi terkait keselamatan kapal pole and line di Bitung.
Hasil penelitian menunjukkan bahwa kualitas stabilitas kapal pole and line
dalam keadaan baik meskipun kapal dibangun tanpa perhitungan desain. Hal ini diwakili oleh nilai lengan penegak (nilai GZ) maksimum pada kondisi simulasi saat kapal beroperasi, sementara nilai GZ minimum pada kondisi kapal dalam keadaan kosong.
Terdapat tujuh regulasi internasional dan lima regulasi nasional terkait dengan keselamatan kapal penangkap ikan. Regulasi internasional secara jelas mengatur keselamatan kapal penangkap ikan, namun penerapan ditingkat nasional masih kurang dan belum selaras.
YULI PURWANTO. Safety Aspects Pole and Liner From Ship Stability and Regulation Point of View in Bitung, North Sulawesi. Supervised by BUDHI HASCARYO ISKANDAR, MOHAMMAD IMRON and BUDY WIRYAWAN.
Fishing is kind of the world's fisheries jobs at risk, so that the safety on board is an important factor that must be considered. The cause of the accident is due to poor quality of stability of fishing vessel. As common practice, traditional fishing boat were built without a suitable design and construction. Fishing boats should also be supported by the required a suitable boat design, to ensure a good performance during operation.
Assessment of relevant policies related to safety of boats and crews of fishing boat have been conducted to determine the extent of the responsibility of government and the extent to which the implementation of existing policies.
The general objective of this research was to analysis the safety aspects of pole and liner, while the specific objectives were : (1) review and analyze quality stability of the fishing vessel (2) a review of regulations related to safety on pole and liner in Bitung.
The results showed that quality pole and liner stability for four conditions the loadcase distribution were good stability. It is represented by the value of all the parameters that are above the standard value IMO. Maximum value of GZ (righting arm) achieved when in vessel operation, while minimum value in empty condition.
There are seven international and five national policies related to the safety of the fishing vessel, but implementation at the national level is still lacking and not aligned.
© Hak Cipta Milik IPB, Tahun 2014
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
KAPAL DAN REGULASI PADA KAPAL POLE AND LINE
DI BITUNG, SULAWESI UTARA
YULI PURWANTO
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Teknologi Perikanan Laut
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Puji dan syukur senantiasa penulis panjatkan kepada Allah SWT atas karunia-Nya sehingga Tesis ini dapat diselesaikan. Topik penelitian yang dipilih dalam penelitian yang dilaksanakan sejak bulan November 2013 sampai Februari 2014 adalah mengenai Aspek Keselamatan ditinjau dari Stabilitas Kapal dan Regulasi pada Kapal Pole and Line di Bitung, Sulawesi Utara.
Terima kasih penulis ucapkan kepada Dr Ir Budhi Hascaryo Iskandar, MSi, Dr Ir Mohammad Imron, MSi dan Dr Ir Budy Wiryawan, Msc selaku Komisi Pembimbing serta Dr Deni Achmad Soeboer, SPi, MSi selaku Penguji Luar Komisi pada ujian Tesis. Ungkapan terima kasih juga disampaikan kepada kedua orang tua dan Istri tercinta atas doa, kasih saying dan dukungannya, serta kepada kerabat dan teman-teman yang senantiasa memberikan dukungan kepada penulis selama menempuh pendidikan di Sekolah Pascasarjana IPB.
Semoga karya ilmiah ini bermanfaat.
Bogor, November 2014
Judul Tesis : Aspek Keselamatan Ditinjau dari Stabilitas Kapal dan Regulasi pada Kapal Pole and Line di Bitung, Sulawesi Utara
Nama : Yuli Purwanto
NIM : C451120121
Disetujui oleh :
Komisi Pembimbing
Dr Ir Budhi Hascaryo Iskandar, MSi Ketua
Diketahui oleh :
Tanggal Ujian : 25 November 2014 Tanggal Lulus : Dr Ir Mohammad Imron, MSi
Anggota
Dr Ir Budy Wiryawan, MSc Anggota
Ketua Program Studi Teknologi Perikanan Laut
Prof Dr Ir Mulyono S. Baskoro, MSc
Dekan Sekolah Pascasarjana
DAFTAR TABEL ix
DAFTAR GAMBAR ix
DAFTAR LAMPIRAN ix
DAFTAR ISTILAH x
1 PENDAHULUAN 1
Latar belakang 1
Perumusan masalah 2
Tujuan Penelitian 3
Manfaat Penelitian 3
Ruang Lingkup Penelitian 3
Waktu dan Tempat Penelitian 4
2 KAPAL POLE AND LINE 5
Metodologi 7
Hasil dan Pembahasan 10
Kesimpulan dan saran 18
3 STABILITAS KAPAL 19
Metodologi 22
Hasil dan Pembahasan 25
Kesimpulan dan saran 27
4 KESELAMATAN KAPAL PENANGKAP IKAN 28
Metodologi 28
Hasil dan Pembahasan 29
Kesimpulan dan saran 42
5 PEMBAHASAN UMUM 43
6 KESIMPULAN DAN SARAN 46
Kesimpulan 46
Saran 46
DAFTAR PUSTAKA 47
LAMPIRAN 49
DAFTARTABEL
8 Hasil analisis parameter stabilitas kapal pole and line berbagai kondisi muatan 26
14 Regulasi internasional dan nasional tentang keselamatan kapal penangkap ikan 40
11 Kondisi kapal kosong; pada kondisi ini diasumsikan BBM, es, umpan hidup, perbekalan logistik dan ABK (0%) 23
12 Kondisi kapal berangkat menuju fishing ground; kondisi kapal diasumsikan BBM, es, umpan hidup dan perbekalan logistik serta ABK (100%) dan hasiltangkapan (0%) 23
13 Kondisi kapal melakukan kegiatan penangkapan ikan; kondisi kapal diasumsikan BBM, es, umpan hidup dan perbekalan logistik (50%) serta hasil tangkapan (50%) dan ABK (100%) 24
14 Ilustrasi kondisi kapal kembali ke fishing base; kondisi kapal diasumsikan BBM, umpan hidup (25%) serta hasil tangkapan dan ABK (100%) 24
15 Kurva stabilitas statis kapal pole and line yang diteliti 25
1 Peta lokasi penelitian 49 2 Tampilan program maxsurf dalam pembuatan lines plan kapal
pole and line yang diteliti 50
3 Simulasi muatan kapal pole and line yang diteliti 51 4 Perhitungan nilai stabilitas kapal pole and line yang diteliti 53 5 Hasil perhitungan parameter stabilitas kapal pole and line
dibandingkan dengan kriteria IMO 55
6 Syarat desain dan peralatan kapal penangkap ikan 57 7 Kondisi eksisting terkait aspek keselamatan pada kapal pole and line
yang diteliti 58
DAFTAR ISTILAH
After perpendicullar (garis tegak buritan) : garis tegak yang ditarik melalui titik perpotongan antara sisi depan linggi kemudi (titik tengah poros kemudi apabila tidak terdapat linggi kemudi) dan tegak lurus dengan garis dasar
Akatsuki bottom : bentuk badan kapal yang menyerupai huruf U namun setiap lekukannya membentuk suatu sudut dengan rata pada bagian bawahnya
Area water plan (Aw) : luas area badan kapal yang terendam oleh air atau luas area yang dibatasi oleh garis air
Base line : garis dasar kapal yang tepat berada di atas lunas kapal
Breadth atau B : lebar terbesar kapal yang diukur dari kulit lambung terluar pada bagian tengah kapal
Centre of buoyancy (titik B) : titik khayal yang merupakan pusat seluruh daya apung pada kapal yang bekerja secara vertikal ke atas ; jarak titik B kapal dari midship sepanjang longitudinal kapal disebut LCB ; jarak antara titik B dengan titik K (keel) disebut KB ; jarak antara titik B dengan titk M (metacentre) secara vertikal disebut BM ; dan jarak antara titik B dengan titk M (metacentre) secara longitudinal disebut BML
Centre of grafity (titik G) : titik khayal yang merupakan pusat gaya berat kapal beserta muatannya yang bekerja secara vertikal ke bawah ; jarak antara titik G dengan titk K (keel) secara vertikal disebut KG sedangkan sepanjang longitudinal kapal yang diukur dari midship disebut LCG
Coefficient block (Cb) : perbandingan antara volume badan kapal yang terendam air dengan volume balok yang dibentuk oleh panjang, lebar dan draft kapal
Coefficient of fineness atau koefisien bentuk kapal : nilai-nilai koefisien yang dapat menunjukan keragaan badan kapal yang terendam oleh air
Coefficient midship (Cm) : perbandingan antara luas penampang gading besar yang terendam air dengan luas persegi empat yang dibentuk oleh lebar dan
draft kapal
Coefficient prismatic (Cp) : perbandingan antara volume badan kapal yang terendam air dengan volume prisma yang dibentuk oleh luas penampang gading besar dan panjang kapal
terendam air pada bagian tengah kapal dengan luas prisma yang dibentuk oleh luas penampang garis air dan tinggi kapal
Deck : lapisan atau bagian kapal yang menghubungkan antara bagian atas dengan bagian bawah kapal
Depth (D) : tinggi kapal yang diukur dari badan kapal terbawah (di atas lunas) hingga deck terendah pada bagian tengah kapal
Draft (d) : jarak vertikal antara garis dasar (base line ) dengan garis air (water line) muatan penuh yang diukur pada pertengahan panjang garis tegak kapal (Lpp)
Encircling gear : kelompok alat tangkap yang dioperasikan dengan cara melingkari gerombolan ikan
Fishing base : pangkalan penangkapan untuk melakukan aktifitas tambat, labuh, bongkar dan muat pada kapal penangkap ikan
Fishing ground : daerah perairan yang memungkinkan kapal penangkap ikan beroperasi dan memiliki sumberdaya yang memadai untuk dilakukan penangkapan ikan
Freeboard : jarak antara draft hingga deck kapal
General arrangement : gambar rencana umum yang menampilkan seluruh bagian kapal secara melintang dan membujur
Hard chin bottom : bentuk badan kapal yang mirip dengan bentuk akatsuki bottom
namun pertemuan antara lambung kiri dengan lambung kanan pada bagian lunas membentuk suatu sudut seperti dagu
Kasko : bentuk badan kapal
Keel (titik K) : titik khayal yang berada tepat di atas lunas kapal
Kurva GZ atau kurva stabilitas : suatu kurva yang menunjukan nilai GZ kapal jika mengalami oleng pada sudut tertentu
Kurva hidrostatis : suatu kurva yang menunjukan perubahan nilai parameter hidrostatis kapal pada masing-masing garis muat (water line)
Lenghth between perpendicular (LBP) : panjang antara garis tegak depan dengan garis tegak belakang pada garis air
Lenghth of waterline (LWL) : panjang garis air yang diukur dari pepotongan garis akhir pada garis tegak buritan
Length over all (LOA) atau L : panjang keseluruhan kapal yang diukur dari ujung buritan hingga ujung haluan
Lines plan : gambar teknik dua dimensi yang menggambarkan rencana garis sebuah kapal secara melintang dan membujur yang disajikan dalam tiga buah gambar yaitu body plan (tampak depan) , profile plan (tampak samping) dan tampak atas setengah badan kapal (half breadth plan)
Metacentre (titk M) : titik khayal yang merupakan titik potong dari garis khayal yang melalui titk B dan titik G saat kapal berada pada posisi tegak dengan garis khayal yang melalui titik tersebut pada saat kapal berada pada posisi miring akibat bekerjanya gaya-gaya pada kapal ; jarak antara titik M dengan titik G (gravity) disebut GM dan jarak antara titik M dengan titik K (keel) secara vertikal disebut KM sedangkan secara longitudinal disebut KML
Midship : bagian tengah kapal
Midship area : luas area penampang irisan melintang kapal di bagian tengah (bagian terlebar kapal)
Parameter hidrostatis : nilai-nilai parameter yang menunjukan nilai keragaan awal sebuah kapal
lingkaran
Round flat bottom : bentuk badan kapal yang bulat dan bagian bawahnya cenderung rata pada bagian tengah
Ton displacement : berat badan kapal yang terendam oleh air
Ton percentimeter immersion (TPC) : berat yang dibutuhkan untuk merubah tinggi draft kapal sebesar 1 cm
Trim : kondisi kapal yang memiliki ketinggian garis air berbeda antara bagian haluan dengan bagian buritan ; jika garis air pada bagian haluan lebih tinggi dibandingkan bagian buritan disebut trim by bow sedangkan jika garis air pada bagian buritan lebih tinggi dari bagian haluan disebut trim by stern
U bottom : bentuk badan kapal yang menyerupai huruf U
Un-intact stability : kondisi kapal tidak kedap air
1
PENDAHULUAN
Latar Belakang
Kegiatan penangkapan ikan merupakan suatu pekerjaan yang beresiko, maka aspek keselamatan diatas kapal adalah faktor terpenting yang harus diperhatikan. Menurut Direktorat Jenderal Perhubungan Laut (2000) penyebab terjadinya musibah pelayaran dan kecelakaan kapal di Indonesia, termasuk didalamnya kecelakaan kapal ikan disebabkan oleh faktor kesalahan manusia (43,7%), faktor alam (32,4%) dan faktor teknis (23,9%). Musibah kecelakaan kapal di perairan Indonesia, antara lain disebabkan oleh tubrukan, kandas dan tenggelam. Kecelakaan kapal akibat faktor alam tidak dapat dihindari pada saat operasi penangkapan ikan, namun dengan meningkatkan faktor teknis seperti kualitas stabilitasdan kualitas sumberdaya manusia diharapkan dapat menghindari kecelakaan kapal.
Kapal penangkap ikan harus juga memenuhi persyaratan kelaiklautan dan standar pengawakan kapal ikan agar dalam kegiatan penangkapan ikan berhasil dan terhindar dari bahaya kecelakaan dilaut. Kriteria kelaiklautan dapat dilihat dari kelayakan penggunaan kapal dalam kegiatan penangkapan ikan yang dapat dipenuhi dengan melakukan proses pembangunan kapal secara baik.
Proses pembangunan kapal secara tadisional pada umumnya berdasarkan kaidah-kaidah yang berlaku dalam arsitek perkapalan, seperti adanya gambar perencanaan yang detail meliputi gambar lines plan, general arrangement
maupun perhitungan arsitek perkapalan (Fyson, 1985). Perencanaan desain kapal merupakan hal yang sangat penting dilakukan karena akan berdampak pada kemampuan kapal dan berpengaruh terhadap stabilitas kapal saat beroperasi. Dalam pembangunan kapal secara tradisional, para pengrajin hanya menentukan panjang lunas, panjang total dan ukuran kapal.
Kapal-kapal yang dalam pengoperasian alat tangkapnya mengejar gerombolan ikan dan ditambah lagi dengan banyaknya awak diatas kapal untuk kegiatan memancing seperti kapal pole and line, kualitas stabilitas kapal merupakan hal utama yang harus diperhatikan. Kapal pole and line memiliki ciri khusus dengan adanya flying deck dan platform sebagai tempat pemancingan. Hal ini dikarenakanpada saat itu kinerja kapal sangat dipengaruhi oleh kondisi perairan (Farhum, 2010).
Sumberdaya ikan yang menjadi tujuan utama usaha penangkapan pole and line adalah ikan cakalang (Katsuwonus pelamis). Penyebaran ikan cakalang dan banyaknya pole and line yang beroperasi adalah didaerah kawasan Indonesia bagian timur seperti di kota Bitung Sulawesi Utara. Armada kapal pole and line
di Bitung cukup bervariasi dan dibangun digalangan tradisional. Pembangunan kapal pole and linedi Bitung tidak didasarkan dengan perhitungan dan perencanaan desain, sehingga kualitas stabilitas kapal perlu dipertanyakan. Kesempurnaan pembangunan kapal dapat ditunjukkan dengan melihat keragaan kapal pada saat kapal dioperasikan, yaitu harus sanggup mengapung dilaut dengan stabil dan bertahan terhadap pengaruh dari luar seperti gelombang dan angin.
keselamatan pelayaran dan kegiatan penangkapan ikan. Berkaitan dengan hal tersebut, maka perlu pertimbangan bagi awak kapal yang terlibat dalam kegiatan penangkapan ikan sebelum ikut berlayar, seperti awak kapal harus berkecukupan dalam pendidikan dan pelatihan keahlian (Certificate of Competency) dan keterampilan (Certificate of Proficiency) serta memiliki kompetensi sesuai dengan aturan yang berlaku. Selain itu juga harus memahami kondisi yang disepakati dalam perjanjian kerja, prosedur dan sistem kerja di kapal penangkap ikan (Suwardjo, 2010). Dari aspek kapal penangkap ikan, pengelolaan kapal harus dilaksanakan dengan baik guna menjamin kesuksesan operasi penangkapan ikan, dan semua bagian kapal harus dirawat dan dioperasikan sesuai dengan kapasitasnya. Secara keseluruhan, keselamatan kapal akan linier dengan kompetensi awak kapal, manajemen berorientasi keselamatan dan kelaikan kapal.
Dari sisi regulasi, telah banyak kebijakan-kebijakan internasional dan nasional yang terkait dengan manajemen keselamatan dilaut. Oleh karena itu, pengkajian terhadap kebijakan nasional perlu dilakukan untuk mengetahui sejauh mana tanggung jawab pemerintah dan sejauh mana kebijakan nasional menampung tuntutan aturan internasional serta memenuhi standarisasi terhadap peningkatan keselamatan kapaldan awak kapal penangkap ikan di Indonesia. Demikian juga dengan kebijakan internasional, secara teknis dapat menjadi salah satu masukan atau bahan pertimbangan dalam merumuskan kebijakan nasional terkait keselamatan kapal dan awak kapal ikan.
Perumusan Masalah
Penyebab kecelakaan kapal ikan yang sering terjadi di Indonesia maupun negara lain adalah faktor teknis seperti kualitas stabilitas kapal yang kurang baik serta peralatan keselamatan yang minim diatas kapal. Faktor lainnya adalah non teknis seperti kurangnya kesadaran tentang keselamatan dan kurangnya kecakapan awak kapal dalam melakukan pelayaran dan kegiatan operasi penangkapan ikan.
Pemerintah Indonesia sampai saat ini belum menerapkan standar kapal penangkap ikan yang sesuai dengan ketentuan internasional, dimana kapal penangkap ikan harus dibangun sesuai dengan kaidah-kaidah standar keselamatan. Demikian juga terhadap standar keahlian dan keterampilan yang harus dimiliki oleh awak kapal penangkap ikan. Pemerintah juga belum mengatur standar pengawakan kapal penangkap ikan menyangkut kualifikasi dan jumlah awak kapal disesuaikan dengan ukuran kapal, daerah pelayaran dan jenis teknologi alat tangkap ikan yang dioperasikan.
Faktor-faktor tersebut diatas perlu dikaji guna perbaikan keselamatan kapal dan awak kapal penangkap ikan di Indonesia. Permasalahan yang dihadapi saat ini yaitu terfokus pada kualitas stabilitas kapal dan pengaturan kebijakan terkait dengan keselamatan kapal penangkap ikan. Berdasarkan hal tersebut maka perlu dikaji mengenai aspek keselamatan kapal dari segi stabilitas kapal dan tinjauan regulasi terkait keselamatan kapal penangkap ikan.
3
Tujuan Penelitian
Tujuan umum penelitian ini adalah mengenai aspek keselamatan pada kapal
pole and line dan tujuan khususnya adalah; (1) mengkaji dan menganalisis untuk mendapatkan kualitas stabilitas kapal pole and line serta (2) mengidentifikasi dan mengkaji tinjauan regulasi terkait keselamatan kapal ikan.
Manfaat Penelitian
Manfaat yang diharapkan dari hasil penelitian ini diantaranya :
1) Bahan informasi ilmu pengetahuan dan teknologi bagi masyarakat dalam hal perancangan pembangunan kapal perikanan.
2) Rujukan bagi stake holders perikanan dalam melaksanakan manajemen keselamatan kapal ikan.
3) Bahan informasi dasar untuk penelitian lanjut.
Ruang Lingkup Penelitian
Kapal digunakan sebagai sarana untuk melakukan kegiatan operasi penangkapan ikan. Keberhasilan kegiatan operasi penangkapan didukung dengan kualitas stabilitas kapal yang baik. Namun disisi lain, ketaatan kepada peraturan terkait keselamatan kapal ikan merupakan hal yang tidak terpisah guna mendukung operasional penangkapan ikan. Untuk melihat efektifitas pengoperasian kapal pole and linedi Bitung, pada penelitian ini dilakukan pengamatan terhadap karakteristik teknis kapal pole and line yang meliputi kesesuaian desain dan kualitas stabilitas.
Pada bagian 2 tulisan ini, telaah dimulai dengan perhitungan untuk mengetahui kesesuain desain kapal pole and line. Perhitungan dan analisis rasio dimensi utama kapal, lines plan, general arrangement dan parameter hidrostatis dipelajari untuk mengetahui desain dan karakteristik teknis kapal pole and line
yang berbasis di Bitung. Hasil dari analisis tersebut dikaji lebih lanjut untuk mengetahui kualitas unjuk kerja kapal pole and line dilaut.
Kajian selanjutnya dilakukan perhitungan stabilitas kapal dan simulasi distribusi muatan. Pada bagian 3 tulisan ini, stabilitas statis dan dinamis kapal
pole and line di Bitung dengan melihat nilai GZ kapal pada simulasi empat kondisi pemuatan yang berbeda yaitu kondisi kapal kosong, berangkat ke daerah penangkapan, melakukan kegiatan penangkapan ikan dan kembali ke fishing base.
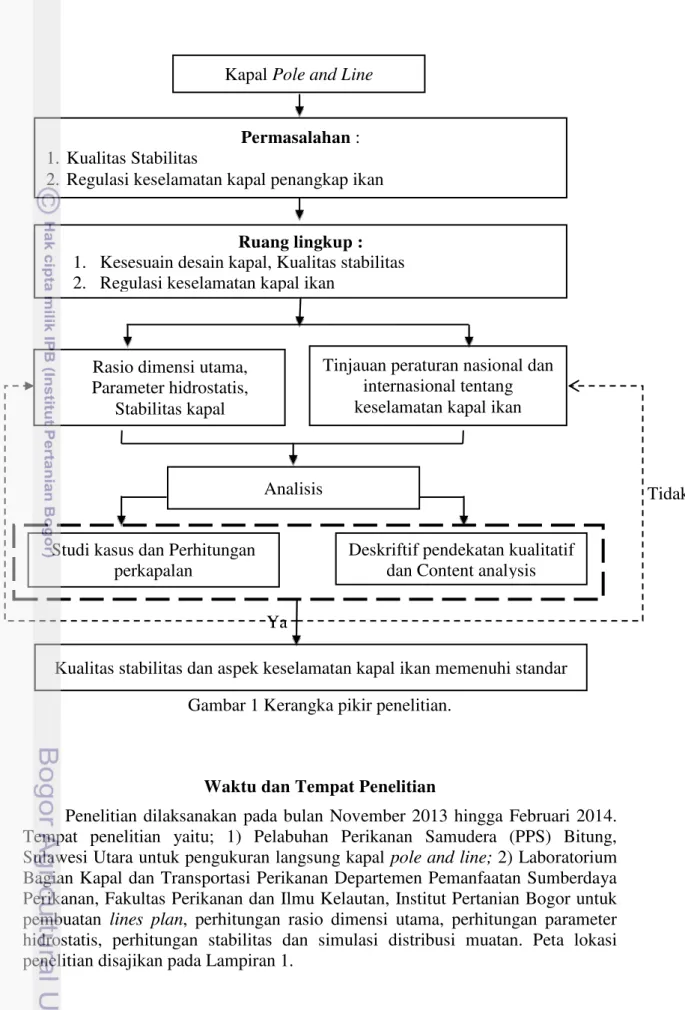
Gambar 1 Kerangka pikir penelitian.
Waktu dan Tempat Penelitian
Penelitian dilaksanakan pada bulan November 2013 hingga Februari 2014. Tempat penelitian yaitu; 1) Pelabuhan Perikanan Samudera (PPS) Bitung, Sulawesi Utara untuk pengukuran langsung kapal pole and line; 2) Laboratorium Bagian Kapal dan Transportasi Perikanan Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor untuk pembuatan lines plan, perhitungan rasio dimensi utama, perhitungan parameter hidrostatis, perhitungan stabilitas dan simulasi distribusi muatan. Peta lokasi penelitian disajikan pada Lampiran 1.
Ya Studi kasus dan Perhitungan
perkapalan
Deskriftif pendekatan kualitatif dan Content analysis Tinjauan peraturan nasional dan
internasional tentang keselamatan kapal ikan Rasio dimensi utama,
Parameter hidrostatis, Stabilitas kapal
Ruang lingkup :
1. Kesesuain desain kapal, Kualitas stabilitas 2. Regulasi keselamatan kapal ikan
Kapal Pole and Line
Permasalahan : 1. Kualitas Stabilitas
2. Regulasi keselamatan kapal penangkap ikan
Kualitas stabilitas dan aspek keselamatan kapal ikan memenuhi standar
2
KAPAL POLE AND LINE
Kapal merupakan kendaraan air dengan bentuk dan jenis apapun, yang digerakkan dengan tenaga mekanik, tenaga angin atau ditunda, termasuk kendaraan yang berdaya dukung dinamis, kendaraan di bawah permukaan air, serta alat apung dan bangunan terapung yang tidak berpindah-pindah (UU RI nomor17 tahun 2008 tentang Pelayaran). Klasifikasi kapal perikanan baik ukuran, bentuk, kecepatan maupun konstruksinya sangat ditentukan oleh peruntukkan kapal perikanan tersebut. Demikian pula dengan kapal penangkap, masing‐masing memiliki ciri khas, ukuran, bentuk, kecepatan dan perlengkapan yang berbeda (Ardidja, 2007). Salah satunya jenis kapal penangkap adalah kapal pole and line.
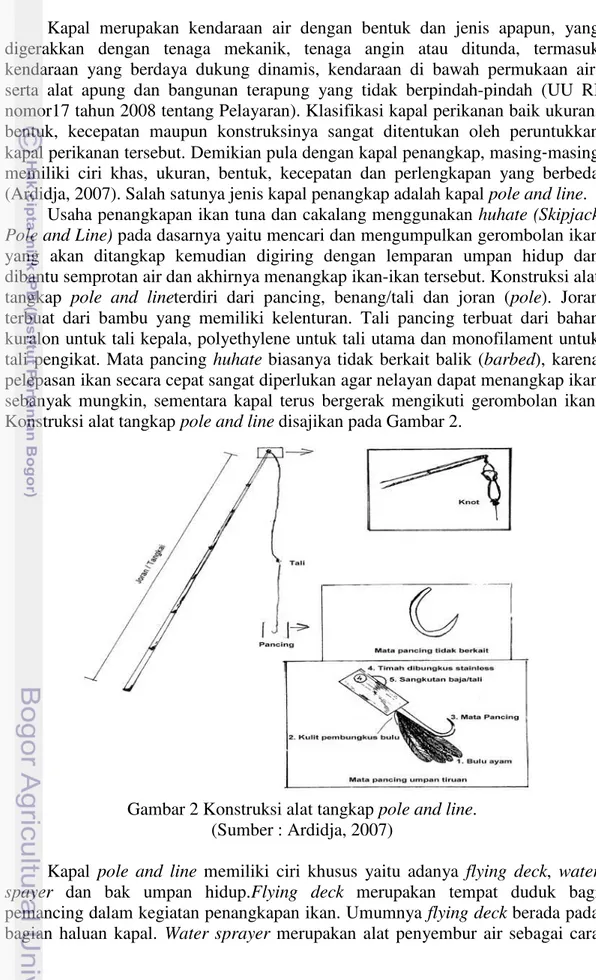
Usaha penangkapan ikan tuna dan cakalang menggunakan huhate (Skipjack Pole and Line) pada dasarnya yaitu mencari dan mengumpulkan gerombolan ikan yang akan ditangkap kemudian digiring dengan lemparan umpan hidup dan dibantu semprotan air dan akhirnya menangkap ikan-ikan tersebut. Konstruksi alat tangkap pole and lineterdiri dari pancing, benang/tali dan joran (pole). Joran terbuat dari bambu yang memiliki kelenturan. Tali pancing terbuat dari bahan kuralon untuk tali kepala, polyethylene untuk tali utama dan monofilament untuk tali pengikat. Mata pancing huhate biasanya tidak berkait balik (barbed), karena pelepasan ikan secara cepat sangat diperlukan agar nelayan dapat menangkap ikan sebanyak mungkin, sementara kapal terus bergerak mengikuti gerombolan ikan. Konstruksi alat tangkap pole and line disajikan pada Gambar 2.
Gambar 2 Konstruksi alat tangkap pole and line. (Sumber : Ardidja, 2007)
untuk mengelabui penglihatan ikan dan sekaligus mengaburkan penglihatan ikan terhadap mata pancing. Water sprayer ini terletak dibagian haluan kapal.
Bak atau palka untuk umpan hidup adalah bagian yang sangat penting bagi penangkapan pole and line. Pengaturan tata ruang, desain dan ukurannya bervariasi tergantung ukuran kapal. Beberapa hal yang berpengaruh terhadap kelangsungan ikan umpan hidup di dalam bak atau palka antara lain sirkulasi didalam bak dan kepadatan ikan umpan. Untuk menjaga sirkulasi masa air didalam bak, dipasang belahan bambu secara melintang dari atas kedasar bak. Disamping itu juga, bak atau palka umpan dapat dijadikan pengatur keseimbangan kapal (ballast) pada saat kembali menuju fishing base.
Umpan hidup merupakan syarat utama bagi usaha penangkapan huhate (pole and line) dengan kata lain, tanpa ikan umpan hidup, usaha ini tidak akan berhasil dengan baik. Fungsi umpan hidup adalah untuk mengumpulkan dan menggiring ikan-ikan untuk bergerombol di sekitar kapal dengan cara umpan hidup dilemparkan dari atas kapal dan dibantu semprotan air. Jenis ikan umpan hidup yang baik antara lain Puri/Teri merah (Stolephorus heterolobus), Puri/Teri hitam (Stolephorus punctifer), Puri/Teri putih (Stolephorus devisi), Momar/ Layang (Decapterus ruselli), Tatare/Kembung (Rastrelliger kanagurta), Lolosi/ Pisang-pisang (Caesio Spp.). Penyimpanan umpan hidup pada bak atau palka khusus yang terdapat lubang dibawahnya untuk sirkulasi air.
Daerah penangkapan dan basis usaha penangkapan pole and line di perairan Indonesia sampai saat inihanya berkembang di 8 (delapan) Propinsi di Indonesia bagian Timur, yaitu : Nusa Tenggara Barat, Nusa Tenggara Timur, Sulawesi Selatan, Sulawesi Tenggara, Sulawesi Tengah, Sulawesi Utara, Maluku dan Papua (Irian Jaya). Sedangkan usaha yang dilakukan di Indonesia bagian Barat tidak bisa berkembang (Ardidja, 2007). Kegiatan penangkapan ikan dengan pole and line
diperairan Bitung banyak dilakukan oleh nelayan tradisional yang menggunakan kapal-kapal berukuran dari 10 GT hingga 94 GT (data statistik PPS Bitung, 2012). Gambar 3 berikut merupakan salah satu kapal ikan pole and line yang berada di perairan Bitung, Sulawesi Utara.
7
Keberhasilan usaha penangkapan ikan menggunakan pole and line sangat ditentukan oleh kelayakan kapal yang digunakan, sehingga perencanaan atau pembuatan kapal yang tepat sesuai dengan peruntukkannya merupakan faktor terpenting. Perencanaan pembangunan kapal ikan merupakan awal dari sejumlah tahapan pembangunan kapal perikanan. Perencanaan pembangunan ini terdiri dari sejumlah pekerjaan yang harus dilakukan oleh pemilik kapal yang menghasilkan sejumlahkriteria yang akan digunakan oleh para perancang kapal (naval architect) dalam mendesain kapal yang akan dibangun.
Pembangunan kapal pole and line di Bitung umumnya dilakukan pada galangan tradisional. Pasalnya, proses pembangunan kapal dilakukan dengan mengandalkan keterampilan pembuat kapal yang diperoleh secara turun temurun dan tanpa di dukung dengan kelengkapan perencanaan, desain dan perhitungan stabilitas sehingga kelayakan kapal pole and line di Bitung perlu dipertanyakan.
Kegiatan penangkapan pole and linedilaut hendaknya memperhatikan aspek keselamatan dan kelaiklautan kapal. Kesempurnaan pembangunan kapal dapat ditunjukkan dengan melihat keragaan kapal pada saat kapal dioperasikan, yaitu harus sanggup mengapung dilaut dengan stabil dan bertahan terhadap pengaruh dari luar seperti gelombang dan angin.
Tujuan pada bab ini adalah mengkaji dan menganalisis desain kapal pole and line di Bitung, Sulawesi Utara berdasarkan dimensi utama kapal dan disesuaikan dengan nilai rasio dimensi kapal di Indonesia serta dilihat dari parameter hidrostatis kapal.
Metodologi
Penelitian ini menggunakan metode survei dengan pendekatan studi kasus pada salah satu kapal pole and line. Kasus yang diteliti adalah kesesuaian desain melalui rasio dimensi utama dan parameter hidrostatis kapal. Jenis data yang dikumpulkan dari pengukuran langsung yaitu dimensi utama dan kelengkungan badan kapal pole and line. Peralatan yang digunakan untuk pengukuran kapal adalah meteran, tali, pendulum, waterpass dan alat tulis.
Metode pengumpulan data dimulai dengan mengukur dimensi utama kapal seperti panjang total (LOA), lebar (B), tinggi (D) dan membagi panjang total kapal menjadi 11 ordinat. Selanjutnya mengukur kelengkungan badan kapal pada setiap ordinat. Data pengukuran bentuk lambung kapal dituangkan dalam lines plan dan parameter hidrostatis.
Nilai rasio dimensi utama kapal diperoleh dengan membandingkan masing-masing dimensi utama sehingga didapat nilai rasio L/B, L/D dan B/D. Analisis nilai rasio dimensi utama kapal pole and line dilakukan dengan hasil penelitian Iskandar dan Pujiati (1995) yang merekomendasikan suatu nilai kisaran rasio dimensi utama kapal perikanan di Indonesia berdasarkan kelompok metode pengoperasian alat tangkap yang digunakan. Besar kecilnya nilai rasio dimensi utama kapal (L,B,D) dalam membangun kapal dapat digunakan untuk menganalisa performa dan mempengaruhi kemampuan dari suatu kapal. Menurut Fyson (1985), dalam desain sebuah kapal karakteristik perbandingan dimensi-dimensi utama (L, B, D) merupakan hal penting yang harus diperhatikan. Perbandingan tersebut meliputi :
2) Perbandingan antara lebar dan dalam (B/D), merupakan faktor yang berpengaruh terhadap stabilitas; dan
3) Perbandingan antara panjang dan dalam (L/D), merupakan faktor yang berpengaruh terhadap kekuatan memanjang kapal.
Nilai parameter hidrostatis kapal dapat diperoleh dengan melakukan perhitungan dengan menggunakan rumus naval architecture (Fyson, 1985).
1) Volume displacement (m³) dengan rumus Simpson I
∇ = h/3 (A0 + 4A1 + 2 A2 + .... + 4An + An+1) …...(1) Keterangan :
A = Luas area bidang air ordinat ke-i pada WL tertentu (m²) 2) Ton displacement (ton)
∆= V × δ ...(2)
Keterangan :
∇ = Volume displacement (m³)
δ = Densitas/berat jenis air laut (1,025 ton/m³) 3) Waterplane area (Aw), dengan rumus Simpson I
Aw = h/3 (Y0 + 4Y1+ 2Y2+ .... + 4Yn + Yn+1) ...(3) Keterangan :
h = Jarak antar ordinat pada garis air (WL) tertentu Yn = Lebar pada ordinat ke-n (m)
4) Ton Per Centimeter (TPC)
TPC = (Aw/100) × 1,025 ...(4) Keterangan :
Aw = Waterplane area (m²) 5) Coefficient of block (Cb)
Cb = ∇
6) Coefficient of midship (Cm)
Cm = Am / (B × d) ...(6) Keterangan :
Am, = Luas tengah kapal (m²) B = Lebar kapal (m)
d = draft kapal (m)
7) Coefficient of prismatic (Cp)
Cp = ∇ / (Am × L) ... (7) Keterangan :
∇ = Volume displacement (m³) Am = Luas area tengah kapal (m²) L = Panjang kapal (m)
8) Coefficient of vertical prismatic (Cvp)
Cvp = ∇ / (Aw × d) ... (8) Keterangan :
9
Aw = Waterplane area (m²) d = draft kapal (m)
9) Coefficient of waterplane (Cw)
Cw = Aw / (L × B) ...(9) Keterangan :
Aw = Waterplane area (m²) L = Panjang kapal (m) B = Lebar kapal (m)
10) Jarak titik apung (B) terhadap lunas (K)
KB = 1/3 [ 2,5 d – (∇ /Aw) ] ...(10) Keterangan :
∇ = Volume displacement (m³) Aw = Waterplane area (m²) d = draft kapal (m)
11) Jarak titik apung (B) terhadap titik metacentre (M)
BM = I / ∇ ...(11) Keterangan :
∇ = Volume displacement (m³) I = Moment innertia
12) Jarak metacentre (M) terhadap lunas (K)
KM = KB + BM ...(12) Keterangan :
KB = Jarak titik apung terhadap lunas BM = Jarak titik apung terhadap metacentre
13) Jarak titik apung terhadap metacentre longitudinal (BML)
BML = IL / ∇ ...(13) Keterangan :
IL = Innertia longitudinal ∇ = Volume displacement (m³)
14) Jarak metacentre longitudinal terhadap lunas (KML)
KML = KB + BML ...(14) Keterangan :
KB = Jarak titik apung terhadap lunas
BML = Jarak titik apung terhadap metacentre longitudinal
15) Jarak titik berat (G) terhadap lunas (K)
KG = I / ∆ ... (15) Keterangan :
∆ = Ton displacement (ton) I = Moment inertia
16) Jarak titik berat (G) terhadap metacentre (M)
GM = KM – KG ... (16) Keterangan :
Hasil dan Pembahasan
Ardidja (2007) menyatakan bahwa dimensi utama kapal terdiri dari ukuran membujur atau memanjang, ukuran melintang atau melebar dan ukuran tegak atau vertikal.
Ukuran membujur/memanjang
a. LOA (Length Over All) adalah panjang kapal yang diukur dari ujung palingdepan haluan kapal hingga ujung paling belakang buritan kapal.
b. LBP (Length Between Perpendicular) yaitu panjang kapal yang diukur dari mulai garis tegak pada tepi air di linggi depan hingga garis tegak pada poros kemudi.
c. LWL (Length Water Line) yaitu panjang kapal yang diukur pada garis muatan penuh.
Gambar 4 Ilustrasi pengukuran membujur (longitudinal) kapal. (sumber : Pengolahan data, 2014 )
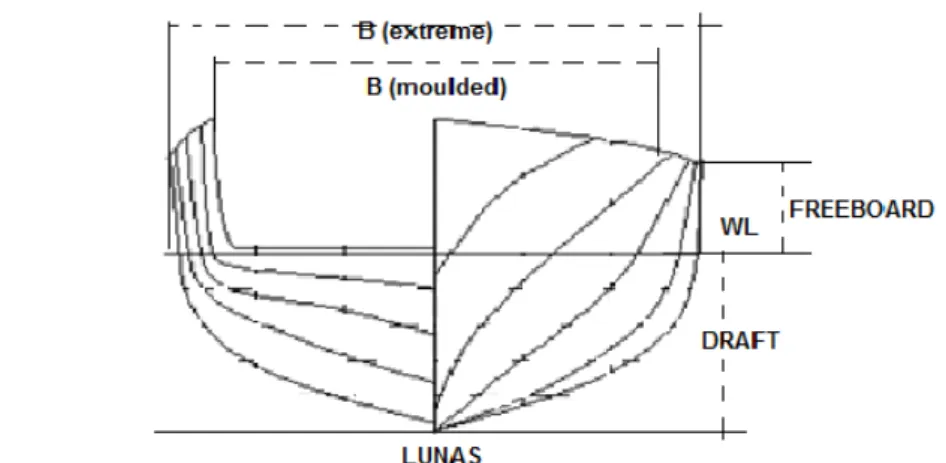
Ukuran melintang /melebar
a. Lebar ekstrim (Extreme breadth) yaitu lebar kapal pada bagian terlebar kapal yang diukur dari tepi luar kulit kapal di lambung kanan hingga tepi luar kulit kapal di lambung kanan sejajar lunas.
b. Lebar dalam (Moulded breadth) yaitu lebar kapal pada bagian terlebar kapal yang diukur dari tepi dalam kulit kapal di lambung kanan hingga tepi dalam kulit kapal di lambung kanan sejajar lunas.
11
Ukuran tegak (vertikal)
a. Moulded Depth, yaitu dalam kapal pada bagian tengah kapal (tipping center atau midship) yang diukur dari titik terendah kapal hingga tepi atas geladak lambung bebas (continuous deck).
b. Sarat kapal (draft) adalah ukuran kapal yang diukur dari titik terendah badan kapal hingga garis air (water line) seperti ditunjukkan Gambar 5. Sarat selalu berubah tergantung dari muatan kapal temasuk perbekalan kapal dan komponen alat penangkap ikan, awak kapal beserta keperluannya, masa jenis air laut dimana kapal mengapung.
c. Lambung bebas (free board) adalah jarak tegak dari garis air hingga geladaklambung bebas (continuous deck) seperti ditunjukkan Gambar 5. Lambung bebas selalu berubah‐ubah tergantung pada berat kapal beserta isinya, serta masa jenis air laut dimana kapal mengapung.
Dimensi utama kapal pole and line yang diteliti disajikan pada Tabel 1. Tabel 1. Dimensi utama kapal pole and line.
Uraian Keterangan
Semakin kecil nilai rasio L/B maka akan berpengaruh buruk terhadap kecepatan kapal karena nilai tahanan geraknya akan semakin besar. Sementara itu nilai L/D yang semakin membesar akan berdampak pada melemahnya kekuatan memanjang kapal dan nilai B/D yang semakin besar akan memberikan stabilitas kapal yang baik tetapi propulsive ability akan memburuk.
Selanjutnya, Ayodhyoa (1972) menyatakan bahwa jika nilai L/B suatu kapal mengecil akan berpengaruh lambat terhadap kecepatan, jika L/D membesar maka kekuatan memanjang (longitudinal strength) akan melemah dan jika nilai B/D dari kapal tersebut membesar, maka stabilitas akan membaik tetapi daya dorong (propulsive ability) akan memburuk.
Tabel 2 Nilai rasio dimensi utama kapal penangkap ikan di Indonesia.
Tabel 2 menjelaskan kelompok kapal penangkap ikan di Indonesia adalah terdiri dari Encircling gear, Static gear, Towed gear dan Multipurpose. Kelompok kapal Encircling gear adalah kapal yang mengoperasikan alat tangkap dengan cara melingkari ikan yang menjadi target penangkapan contohnya kapal purse seine. Kelompok kapal static gear adalah kapal yang mengoperasikan alat tangkapnya secara pasif atau tidak bergerak contohnya kapal gillnet, kapal pole and line. Kelompok kapal towed gear adalah kapal yang mengoperasikan alat tangkapnya dengan cara ditarik contohnya kapal trawl dan kelompok kapal
multipurpose adalah kapal yang mengoperasikan alat tangkapnya lebih dari satu (Iskandar dan Pujiati, 1995).
Tabel 3 Perhitungan nilai rasio dimensi utama kapal pole and line.
Rasio dimensi utama Kapal pole and line Nilai acuan* L/B
Sumber : * Iskandar dan Pujiati (1995).
Tabel 3 menjelaskan perhitungan nilai rasio dimensi utama kapal pole and line yang diteliti dibandingkan dengan nilai rasio kapal-kapal ikan yang ada diIndonesia. Perhitungan nilai L/B sebesar 5,81 menunjukkan bahwa kapal masih berada pada kisaran nilai acuan yang disampaikan. Nilai yang relatif kecil dan mendekati batas bawah acuan tersebut menunjukkan bahwa tahanan gerak yang dialami kapal cukup besar sehingga berdampak negatif terhadap kecepatan kapal. Perhitungan nilai L/D sebesar 9,6 menunjukkan bahwa kekuatan memanjang kapal relatif baik.
Rasio dimensi utama yang dapat menggambarkan kestabilan suatu kapal adalah perbandingan lebar terhadap dalam (B/D). Perhitungan nilai B/D sebesar 1,68 menunjukkan bahwa stabilitas kapal relatif cukup baik. Perbandingan nilai rasio dimensi utama kapal pole and line yang diteliti, maka pada umumnya sesuai dengan kapal static gear di Indonesia. Meskipun demikian, efisiensi dan kondisi stabilitas perlu ditingkatkan sehingga dapat digunakan sebagai pedoman bagi pembangunan kapal sejenis dimasa mendatang.
13
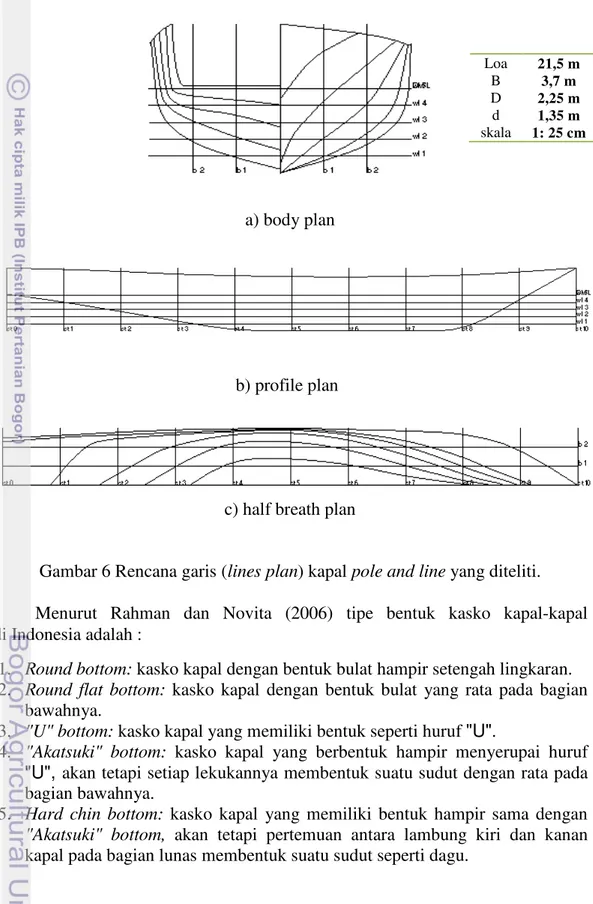
atas 3 jenis gambar yaitu gambar kapal tampak samping (profile plan), gambar setengah kapal tampak atas (half breadth plan) dan badan kapal tampak depan (body plan).Adapun rencana garis kapal pole and lineyang diteliti disampaikan pada Gambar 6.
a) body plan
b) profile plan
c) half breath plan
Gambar 6 Rencana garis (lines plan) kapal pole and line yang diteliti.
Menurut Rahman dan Novita (2006) tipe bentuk kasko kapal-kapal di Indonesia adalah :
1. Round bottom: kasko kapal dengan bentuk bulat hampir setengah lingkaran. 2. Round flat bottom: kasko kapal dengan bentuk bulat yang rata pada bagian
bawahnya.
3. "U" bottom: kasko kapal yang memiliki bentuk seperti huruf "U".
4. "Akatsuki" bottom: kasko kapal yang berbentuk hampir menyerupai huruf
"U", akan tetapi setiap lekukannya membentuk suatu sudut dengan rata pada bagian bawahnya.
5. Hard chin bottom: kasko kapal yang memiliki bentuk hampir sama dengan
"Akatsuki" bottom, akan tetapi pertemuan antara lambung kiri dan kanan kapal pada bagian lunas membentuk suatu sudut seperti dagu.
Loa B D d skala
\
Secara umum bila dilihat dari gambar lines plan, kapal pole and line yang diteliti memiliki bentuk badan kapal V (V bottom) dibagian depan, bentuk
Akatsuki bottom pada bagian tengah dan bentuk Round flat bottom pada bagian belakang kapal. Bentuk ini memungkinkan kapal memiliki tahanan yang tidak terlalu besar dan volume ruang yang maksimum bagi palkah.
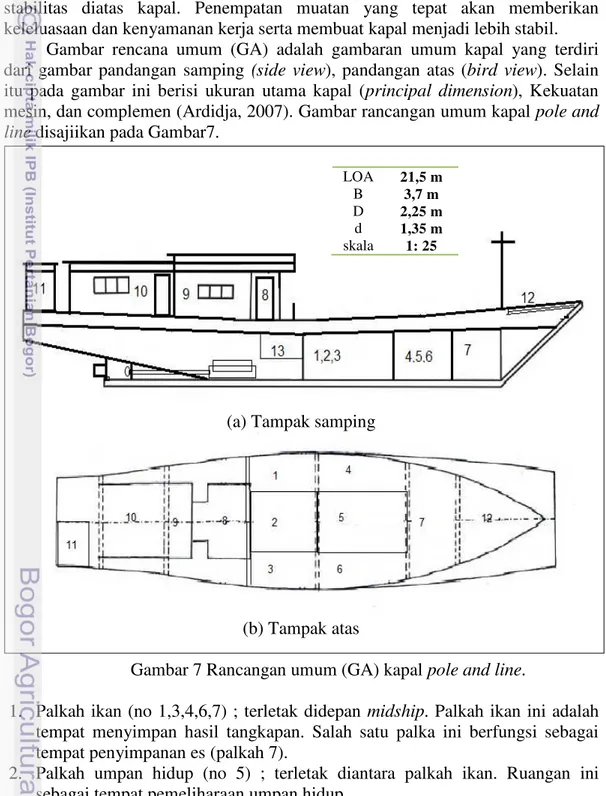
Gambar rancangan umum (general arrangement) merupakan gambar yang menunjukkan tata letak ruangan di atas kapal. Ini sangat penting dalam menunjang kegiatan penangkapan ikan dan berpengaruh besar terhadap kondisi stabilitas diatas kapal. Penempatan muatan yang tepat akan memberikan keleluasaan dan kenyamanan kerja serta membuat kapal menjadi lebih stabil.
Gambar rencana umum (GA) adalah gambaran umum kapal yang terdiri dari gambar pandangan samping (side view), pandangan atas (bird view). Selain itu pada gambar ini berisi ukuran utama kapal (principal dimension), Kekuatan mesin, dan complemen (Ardidja, 2007). Gambar rancangan umum kapal pole and line disajiikan pada Gambar7.
(a) Tampak samping
(b) Tampak atas
Gambar 7 Rancangan umum (GA) kapal pole and line.
1. Palkah ikan (no 1,3,4,6,7) ; terletak didepan midship. Palkah ikan ini adalah tempat menyimpan hasil tangkapan. Salah satu palka ini berfungsi sebagai tempat penyimpanan es (palkah 7).
2. Palkah umpan hidup (no 5) ; terletak diantara palkah ikan. Ruangan ini sebagai tempat pemeliharaan umpan hidup.
LOA B D d skala
15
3. Palkah air tawar (no 2) ; letaknya juga diantara palka ikan. Palkah inisebagai tempat penyimpanan air tawar yang digunakan untuk keperluan memasak, mandi dan keperluan kebersihan diatas kapal.
4. Ruang navigasi (no 8) ; terdapat dibagian atas dek, lebih tinggi dari ruangan lain. Ruangan tersebut sebagai tempat nakhoda atau juru mudi melakukan aktifitas mengolah gerak kapal.
5. Ruang akomodasi (no 9,10) ; ruangan ini terletak diatas ruang mesin. Ruangan ini digunakan untuk istirahat dan menyimpan perlengkapan yan dibawa awak kapal selama berlayar.
6. Ruang memasak (no11) ; terletak dibelakang buritan sebelah kanan. Tempat ini digunakan untuk memasak untuk kebutuhan awak kapal selama berlayar. 7. Flying deck (no 12) ; letaknya didepan haluan. Tempat ini digunakan oleh
awak kapal untuk melakukan aktifitas penangkapan ikan dengan alat tangkap
pole and line. Pada flying deck juga terdapat pipa-pipa alat penyemprotan air yang berfungsi sebagai hujan buatan untuk mengelabui pandangan ikan. 8. Tanki BBM (no. 13) ; letaknya dibawah ruang anjungan. Tempat ini
digunakan untuk menyimpan bahan bakar kapal.
Keragaan kapal secara statis dapat digambarkan dengan melihat nilai dari parameter hidrostatis. Parameter hidrostatis juga menggambarkan kondisi awal kapal sebelum kapal mengalami perubahan berat, variasi trim dan draft. Fyson (1985) menjelaskan bahwa parameter hidrostatis yang perlu dihitung adalah volume dan ton displacement, waterplan area, coefficient of fineness (Cb, Cp, Cvp, Cm, Cw), ton percentimetre immersion (TPC), longitudinal centre of bouyancy (LCB), jarak maya pusat gaya apung (KB), jari-jari metacenter vertikal (BM) dan longitudinal (BML) dan jarak maya titik metacenter vertikal (KM) dan longitudinal (KML).
Nilai coefficient of fineness kapal erat hubungannya dengan stabilitas kapal.
Coefficient of fineness akan menunjukkan bentuk badan kapal berdasarkan hubungan antara luas area badan kapal dengan volume kapal terhadap masing-masing dimensi utama kapal (Fyson, 1985).
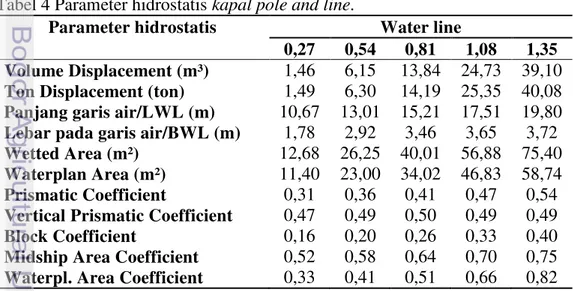
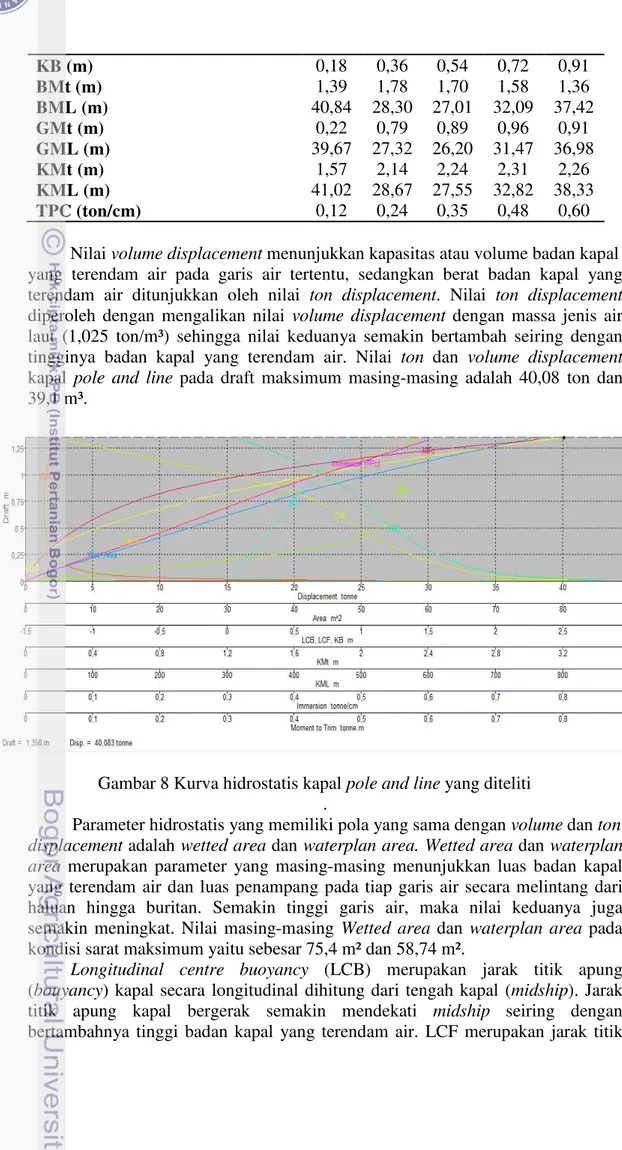
Parameter hidrostatis kapal disampaikan pada Tabel 4 dan kurva hidrostatisnya dapat dilihat pada Gambar 8.
Tabel 4 Parameter hidrostatis kapal pole and line.
Parameter hidrostatis Water line
Vertical Prismatic Coefficient 0,47 0,49 0,50 0,49 0,49
Block Coefficient 0,16 0,20 0,26 0,33 0,40
Midship Area Coefficient 0,52 0,58 0,64 0,70 0,75
KB (m) 0,18 0,36 0,54 0,72 0,91
BMt (m) 1,39 1,78 1,70 1,58 1,36
BML (m) 40,84 28,30 27,01 32,09 37,42
GMt (m) 0,22 0,79 0,89 0,96 0,91
GML (m) 39,67 27,32 26,20 31,47 36,98
KMt (m) 1,57 2,14 2,24 2,31 2,26
KML (m) 41,02 28,67 27,55 32,82 38,33
TPC (ton/cm) 0,12 0,24 0,35 0,48 0,60
Nilai volume displacement menunjukkan kapasitas atau volume badan kapal yang terendam air pada garis air tertentu, sedangkan berat badan kapal yang terendam air ditunjukkan oleh nilai ton displacement. Nilai ton displacement
diperoleh dengan mengalikan nilai volume displacement dengan massa jenis air laut (1,025 ton/m³) sehingga nilai keduanya semakin bertambah seiring dengan tingginya badan kapal yang terendam air. Nilai ton dan volume displacement
kapal pole and line pada draft maksimum masing-masing adalah 40,08 ton dan 39,1 m³.
Gambar 8 Kurva hidrostatis kapal pole and line yang diteliti .
Parameter hidrostatis yang memiliki pola yang sama dengan volume dan ton displacement adalah wetted area dan waterplan area. Wetted area dan waterplan area merupakan parameter yang masing-masing menunjukkan luas badan kapal yang terendam air dan luas penampang pada tiap garis air secara melintang dari haluan hingga buritan. Semakin tinggi garis air, maka nilai keduanya juga semakin meningkat. Nilai masing-masing Wetted area dan waterplan area pada kondisi sarat maksimum yaitu sebesar 75,4 m² dan 58,74 m².
17
pusat pengapungan kapal yang dihitung dari midship. LCF juga dapat didefinisikan sebagai jarak dari titik pusat waterplan area kapal pada draft tertentu terhadap midship, sehingga posisi LCF sangat dipengaruhi oleh bentuk lambung kapal yang terendam air. Pada kondisi draft desain, nilai LCB adalah sebesar 0,08 m berada di depan midship sedangkan nilai LCF sebesar 1,16 m yang berada di belakang midship.
Titik penting yang memberikan pengaruh besar terhadap keragaan kapal adalah jarak vertikal dari lunas kapal (K) ke pusat titik berat (G) dan titik apung (B). Jarak dari lunas kapal ke pusat titik apung disebut dengan KB sementara jarak dari lunas kapal ke titik berat disebut dengan KG. Nilai KB akan semakin besar seiring dengan pertambahan draft, sedangkan nilai KG akan semakin berkurang seiring dengan dalamnya kapal yang terendam air. Pada kondisi draft desain, nilai KG sebesar 1,35 m dan nilai KB 0,91 m. Hal ini berarti titik berat kapal (gravity) berada lebih tinggi dari titik apungnya.
Titik metacentre (M) merupakan satu dari 3 titik keseimbangan yang sangat penting artinya bagi kestabilan kapal selain titik berat (G) dan titik apung (B). Posisi titik M menjadi parameter untuk menentukan kondisi kestabilan kapal. Berdasarkan hasil perhitungan pada Tabel 4, maka posisi titik M dibagi menjadi 2 jenis yaitu Mt dan ML. Jarak titik apung terhadap metacentre secara vertikal atau BMt adalah sebesar 1,36 m dan jarak lunas terhadap metacentre (KMt) sebesar 2,26 m. Jarak dari titik berat terhadap metacentre (GMt) adalah sebesar 0,91 m. Hal ini menunjukkan bahwa posisi titik M kapal pole and line berada diatas titik G sehingga kapal memiliki kestabilan yang positif.
Jarak titik G, B dan K terhadap titik metacentre membujur (ML) dilambangkan dengan GML, BML dan KML. ML merupakan titik perpotongan antara garis-garis tegak yang melalui titik B secara membujur. Semakin tinggi draft maka nilai GML, BML dan KML semakin kecil. Pada kondisi draft desain nilai GML, BML dan KML berturut-turut adalah 36,98 m; 37,42 dan 38,33 m. Perubahan draft erat hubungannya dengan jumlah muatan yang ada diatas kapal.
Jumlah bobot yang diperlukan untuk merubah draft kapal sebesar 1 cm dinyatakan dengan TPC (ton per centimeter). Semakin tinggi nilai perubahan sarat kapal yang diinginkan, maka bobot yang diperlukan semakin besar. Pada draft maksimum, nilai TPC 0,6 ton yang berarti bahwa untuk merubah draft sebesar 1 cm dari nilai draft maksimum (1,35 m) dibutuhkan bobot sebesar 0,6 ton.
Tabel 5 Nilai coefficient of fineness acuan dan kapal pole and line.
Static gear* Kapal pole and line
Cb Sumber : * Iskandar dan Pujiati (1995).
Coefficient of block adalah perbandingan dari volume of displacement pada sarat maksimum terhadap volume persegi panjang yang mengelilinginya. Pada kondisi draft maksimum, nilai Cb kapal sebesar 0,4 yang berarti bahwa bentuk badan kapal yang berada dibawah garis air pada sarat maksimum cenderung ramping.
Coefficient of prismatic menunjukkan perbandingan antara volume displacement kapal dengan volume yang dibentuk oleh luas area penampang melintang tengah kapal dan panjang kapal pada draft maksimum. Nilai ini juga menunjukkan bentuk badan kapal secara horizontal. Nilai Cp kapal sebesar 0,54. Semakin besar Cp, maka bentuk penampang melintang kapal tidak banyak mengalami perubahan sepanjang LWL (draft desain).
Bentuk kapal pada bagian midship secara melintang dapat dilihat dari nilai
coefficient of midship. Dilihat dari nilai Cm sebesar 0,75 maka bentuk kapal pada bagian midshipsecara melintang cenderung gemuk sehingga tahanan yang dialami kapal relatif besar.
Coefficient of waterplan area dapat digunakan untuk melihat luasan atau ruangan yang dapat digunakan sebagai ruang muat. Koefisien ini juga menunjukkan perbandingan antara luas penampang pada draft maksimum dengan bidang persegi yang mengelilinginya. Nilai Cw sebesar 0,82 menunjukkan bahwa bentuk penampang melintang kapal pada draft maksimum cenderung mendekati persegi. Ini berarti kapal memiliki daya tampung yang cukup luas. Selain itu, bentuk badan kapal secara vertikal dapat dilihat dari nilai Cvp. Nilai Cvp merupakan perbandingan antara volume badan kapal yang terendam air dengan volume sebuah prisma dengan luas penampang (Aw) dan tinggi (D). Nilai Cvp juga dapat diperoleh dengan membandingkan nilai Cb dengan Cw. Nilai Cvp sebesar 0,49 menunjukkan bahwa bentuk badan kapal secara vertikal pada draft desain banyak mengalami perubahan.
Kesimpulan dan saran
Rasio dimensi utama kapal pole and lineyang diteliti sesuai dengan kapal
static gear di Indonesia pada umumnya. Kapal pole and line yang diteliti memiliki bentuk badan kapal V (V bottom) dibagian depan, bentuk Akatsuki bottom pada bagian tengah dan bentuk Round flat bottom pada bagian belakang kapal. Nilai coefficient of fineness kapal yang diteliti adalah Cb : 0.4; Cp : 0.54; Cm : 0.75; Cw : 0.82 dan Cvp : 0.49
3 STABILITAS KAPAL
Stabilitas sebuah kapal mengacu pada kemampuan kapal untuk tetap mengapung tegak di air. Berbagai penyebab dapat mempengaruhi stabilitas sebuah kapal dan menyebabkan kapal terbalik. Namun demikian, penyebab tersebut dapat dikontrol. Kapal yang tidak stabil akan menimbulkan berbagai permasalahan, seperti kecelakaan, kerusakan, tenggelam dan lain-lain. Bagi awak kapal perikanan, keselamatan harus menjadi prioritas utama yang harus diperhatikan, mencegah kerusakan kapal, mencegah kecelakaan fatal, dan menjaga kelestarian lingkungan (tumpahan minyak, bangkai kapal dilaut).
Kapal penangkap ikan memiliki karakteristik yang berbeda dengan kapal jenis lainnya. Seperti pada kapal pole and line yang melakukan gerakan mengejar gerombolan ikan, membawa bak atau palka umpan hidup, melakukan pemancingan yang biasanya dilakukan pada salah satu sisi kapal yang mengakibatkan terjadinya keolengan pada kapal. Karena itu, kapal pole and line
dituntut untuk memiliki stabilitas dan olah gerak yang baik serta tahanan yang sekecil mungkin.
Kondisi stabilitas kapal dapat dibagi dalam dua jenis yaitu stabilitas statis dan stabilitas dinamis. Stabilitas statis (statical stability) adalah stabilitas kapal yang diukur pada kondisi air tenang dengan beberapa sudut keolengan pada nilai
ton displacement yang berbeda. Nilai stabilitas statis kapal ditunjukkan oleh nilai lengan penegak (GZ). Stabilitas dinamis (dynamic stability) adalah stabilitas kapal yang diukur dengan jalan memberikan suatu usaha pada kapal sehingga membentuk sudut keolengan tertentu.
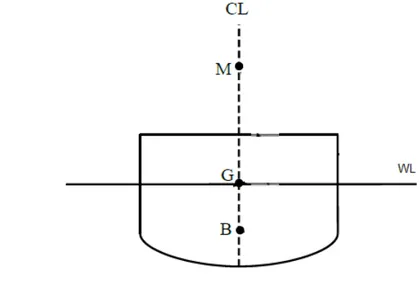
Stabilitas kapal melintang sangat ditentukan oleh letak titik-titik penting. titik-titik penting yang menentukan keseimbangan awal kapaladalah :
1) Titik berat (G)
Titik berat (Centre of gravity) disingkat dengan titik G, merupakan titik pusat dari gaya-gaya berat yang menekan tegak lurus ke bawah. Letak titik berat kapal (G) selalu berada pada tempatnya, yaitu pada sebuah bidang datar yang dibentuk oleh lunas (keel) dan haluan kapal, dimana letak kapal simetris terhadap bidang ini. Bidang tersebut di atas, disebut juga bidang simetris (centre line) disingkat dengan CL. Letak titik berat kapal (G) akan berubah apabila dalam kapal tersebut terjadi penambahan, pengurangan, dan pergeseran posisi muatan. Dalam stabilitas awal (initial stability) walaupun titik G keluar dari bidang simetris, tetapi tetap tidak mempengaruhi keseimbangan kapal. Pada kapal dalam keadaan tegak, titik G selalu berada pada bidang simetris. 2) Titik apung (B)
Titik apung (centre of buoyancy) atau disingkat dengan titik B, merupakan titik tangkap dari semua gaya yang menekan tegak lurus ke atas, dimana gaya- gaya tersebut berasal dari air. Posisi titik B tergantung dari bentuk bagian kapal dibawah garis air (WL), dan tidak pernah tetap selama adanya perubahan sarat (draft) kapal.
3) Titik metacentre (M)
juga didefinisikan sebagai sebuah titik batas dimana titik G tidak melewatinya, agar kapal selalu memiliki stabilitas yang positif.
Kapal yang memiliki keseimbangan yang stabil (stable equilibrium) saat kapal dalam kedudukan tegak titik M, G, B secara berurutan akan terletak pada bidang tengah kapal, dan titik G berada di bawah titik M.
Gambar 9 titik-titik penting penentu keseimbangan awal kapal.
Stabilitas Statis
Stabilitas statis (Initial stability) adalah stabilitas kapal yang diukur pada kondisi air tenang dengan beberapa sudut olengan pada nilai ton displacement
yang berbeda. Nilai stabilitas statis kapal ditunjukkan oleh nilai lengan penegak (GZ). Salah satu cara untuk mengetahui kondisi stabilitas kapal adalah dengan melihat kurva stabilitas statis kapal yang bersangkutan. Kurva stabilitas statis (GZ) menunjukkan nilai lengan pengembali (righting arm) pada nilai sudut oleng yang berbeda. Kurva stabilitas statis (statical stability curve) merupakan kurva yang menunjukkan besarnya lengan stabilitas statis pada sebuah kapal pada sudut kemiringan mulai dari 0-90 derajat pada keadaan pemuatan tertentu. Informasi yang dapat diperoleh dari suatu kurva stabilitas statis antara lain selang stabilitas, nilai GZ maksimum dan tinggi metacentre (GM).
Keselamatan kapal dipengaruhi oleh beberapa nilai yaitu besar GM kapal,
vanishing angle dan stabilitas dinamis. Oleh karena itu perhitungan lengan penegak (GZ) dan distribusi muatan di atas kapal sangat erat kaitannya dengan stabilitas kapal. Perubahan atau perbedaan distribusi muatan kapal akan mengakibatkan terjadinya perubahan nilai KG yang pada akhirnya juga akan merubah besar lengan penegak (GZ) yang dihasilkan.
21
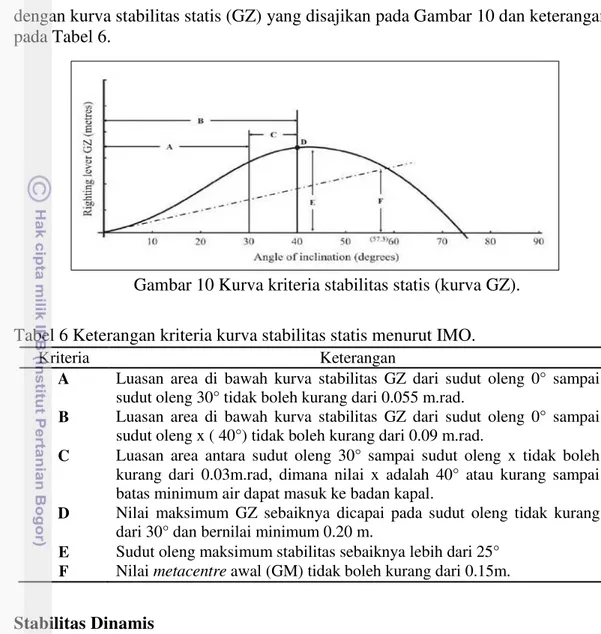
dengan kurva stabilitas statis (GZ) yang disajikan pada Gambar 10 dan keterangan pada Tabel 6.
Gambar 10 Kurva kriteria stabilitas statis (kurva GZ).
Tabel 6 Keterangan kriteria kurva stabilitas statis menurut IMO.
Stabilitas Dinamis
Stabilitas dinamis merupakan sejumlah tenaga yang diperlukan untuk membuat kapal miring pada sudut tertentu. Besar kerja tersebut adalah sama dengan berat kapal dikalikan dengan jarak antara dua garis tegak yang melalui titik berat dan titik benam (titik pusat gaya tekan air ke atas).
Apabila kurva stabilitas statis kapal telah diketahui maka nilai stabilitas dinamis dapat dihitung dengan menjumlahkan luas bagian (area) dibawah kurva pada sudut oleng yang berbeda. Prinsip perhitungan yang digunakan adalah berdasarkan prinsip perhitungan luas trapesium (trapezoidal). Perhitungan dilakukan dengan membagi area dibawah kurva dengan jarak sudut oleng yang sekecil mungkin.
Tujuan penelitian pada bab ini adalah mengkaji dan menganalisis stabilitas statis dan dinamis kapal.
Kriteria Keterangan
A Luasan area di bawah kurva stabilitas GZ dari sudut oleng 0° sampai sudut oleng 30° tidak boleh kurang dari 0.055 m.rad.
B Luasan area di bawah kurva stabilitas GZ dari sudut oleng 0° sampai sudut oleng x ( 40°) tidak boleh kurang dari 0.09 m.rad.
C Luasan area antara sudut oleng 30° sampai sudut oleng x tidak boleh kurang dari 0.03m.rad, dimana nilai x adalah 40° atau kurang sampai batas minimum air dapat masuk ke badan kapal.
D Nilai maksimum GZ sebaiknya dicapai pada sudut oleng tidak kurang dari 30° dan bernilai minimum 0.20 m.
Metodologi
Metode yang digunakan dalam penelitian ini adalah studi kasus dan simulasi numerik. Kasus yang diteliti adalah stabilitas kapal pole and line baik stabilitas statis, dinamis maupun stabilitas kapal pada simulasi distribusi muatan yang berbeda. Jenis data yang dikumpulkan merupakan hasil data perhitungan parameter hidrostatis dari bab 2 tulisan ini. Hasil perhitungan parameter hidrostatis selanjutnya digunakan sebagai data dasar dalam perhitungan stabilitas kapal untuk mencapai tujuan pada bab 3 tulisan ini. Kualitas stabilitas yang dimaksud adalah stabilitas statis dan dinamis kapal pole and line dalam kondisi kosong (kasko) dan stabilitas statis kapal pada kondisi muatan yang berbeda.
Pengolahan data dimulai dengan menghitung nilai GZ kapal dengan menggunakan data parameter hidrostatis yang telah diperoleh dengan bantuan
software perkapalan. Selanjutnya membuat kurva stabilitas statis yang menunjukkan nilai lengan penegak (GZ) pada sudut oleng tertentu. Kemudian membandingkan nilai lengan penegak (GZ) yang diperoleh dengan nilai standar yang dikeluarkan oleh International Maritime Organization (IMO) dan terakhir menganalisis dan menginterpretasikan nilai lengan penegak (GZ) yang diperoleh setelah dibandingkan dengan kriteria IMO.
Apabila kurva stabilitas statis kapal telah diketahui maka nilai stabilitas dinamis dapat dihitung dengan menjumlahkan luas bagian (area) dibawah kurva pada sudut oleng yang berbeda. Prinsip perhitungan yang digunakan adalah berdasarkan prinsip perhitungan luas trapesium (trapezoidal). Perhitungan dilakukan dengan membagi area dibawah kurva dengan jarak sudut oleng yang sekecil mungkin. Oleh karena itu, jarak sudut oleng yang digunakan adalah satu radian sehingga secara sederhana dapat dirumuskan sebagai berikut :
Luas area (m.rad) =�1+�0
23
Gambar 11 Kondisi kapal kosong; pada kondisi ini diasumsikan BBM, es, umpan hidup, perbekalan logistik dan ABK (0%).
Gambar 13 Kondisi kapal melakukan kegiatan penangkapan ikan; kondisi kapal diasumsikan BBM, es, umpan hidup dan perbekalan logistik (50%) serta hasil tangkapan (50%) dan ABK (100%).
25
Hasil dan Pembahasan
Salah satu cara untuk mengetahui kondisi stabilitas kapal adalah dengan melihat kurva stabilitas statis kapal yang bersangkutan. Kurva stabilitas statis menunjukkan nilai lengan pengembali (righting arm) pada nilai sudut oleng yang berbeda. Informasi yang dapat diperoleh dari suatu kurva stabilitas statis antara lain selang stabilitas, nilai GZ maksimum dan tinggi metacentre (GM). Kurva stabilitas statis kapal pole and linedisampaikan pada Gambar 15.
Gambar 15 Kurva stabilitas statis kapal pole and line yang diteliti.
Selang stabilitas statis kapal untuk kondisi kapal kosong berada pada kisaran 0º - 73º. Selang ini menunjukkan bahwa kapal masih memiliki nilai GZ yang positif hingga sudut kemiringan 73º. Kriteria penilaian stabilitas yang digunakan merupakan nilai yang direkomendasikan oleh IMO. Hasil perhitungan parameter stabilitas kapal dibandingkan dengan nilai minimum yang direkomendasikan IMO sehingga kualitas stabilitasnya dapat ditelaah. Hasil perhitungan stabilitas statis kapal disampaikan pada Tabel 7.
Tabel 7 Kriteria stabilitas statis kapal pole and line yang diteliti.
Kriteria IMO Nilai Status
Tabel diatas menunjukkan bahwa, pada dua kriteria stabilitas statis (kriteria A dan B) gaya pengembali kapal pole and line pada sudut kemiringan tersebut lebih kecil dari kriteria yang direkomendasikan IMO. Nilai maksimum GZ kapal
tegak yang besarnya meningkat hingga pada sudut 46,8°. Momen penegak (GZ) bernilai positif pada selang sudut kemiringan 0°- 73° (Gambar 11). Jika sudut kemiringan kapal melebihi sudut tersebut, maka nilai GZ akan menjadi negatif.
Distribusi muatan ketika kapal dioperasikan juga memberikan pengaruh terhadap stabilitas kapal. Oleh karena itu, perhitungan stabilitas kapal pole and line juga dilakukan terhadap kondisi eksisting muatan. Muatan kapal pole and line
terdiri dari alat tangkap, umpan, ABK, BBM, perbekalan (es, air tawar, bahan makanan) dan hasil tangkapan. Analisis stabilitas dengan kondisi muatan eksisting dilakukan terhadap 4 (empat) simulasi distribusi muatan yang berbeda. Kondisi stabilitas kapal pole and line dalam berbagai kondisi muatan disampaikan pada Tabel 8.
Tabel 8 Hasil analisis parameter stabilitas kapal pole and line berbagai kondisi muatan.
Nilai pada kurva GZ Standar IMO Kondisi distribusi muatan
1 2 3 4
Nilai periode oleng suatu kapal sangat tergantung dari besarnya nilai radius
metacenter (GM) dari kapal tersebut. Semakin besar GM dengan lebar kapal yang tetap maka nilai periode oleng semakin kecil dan sebaliknya semakin kecil GM kapal maka periode oleng akan semakin besar. Periode oleng yang cepat akan rnengakibatkan kapal menjadi kaku (stiff) dan menyentak-nyentak bila terjadi keolengan. Pada kondisi ini kenyamanan kerja di dek tidak tercapai akibat sentakan yang terlalu cepat. Sebaliknya, pada periode oleng yang terlalu lambat karena GM yang kecil menyebabkan kapal menjadi langsar (tender) bila terjadi keolengan. Pada kondisi ini kondisi kerja di dek menjadi lebih nyaman.
27
Gambar 16 Kurva stabilitas statis dan dinamis kapal pole and line berbagai kondisi muatan.
Nilai GZ maksimum (kriteria D) dan sudut kemiringan (kriteria E) menunjukkan energi terbesar yang dimiliki oleh kapal pole and line untuk kembali ke posisi semula setelah mengalami kemiringan. Dari keempat kondisi simulasi distribusi muatan, nilai GZ maksimum tertinggi pada kondisi muatan kapal beroperasi dengan nilai 0,559 m.rad dan terbentuk pada sudut maksimum 50,5°. Sementara nilai GZ minimum pada kondisi muatan kapal kosong dengan nilai 0,245 m.rad, terbentuk pada sudut 46,8°.
Kesimpulan dan Saran
Bentuk badan kapal pole and line yang diteliti cenderung ramping. Kondisi kapal pada saat melakukan kegiatan operasi penangkapan ikan merupakan kondisi kapal yang memiliki tingkat stabilitas paling baik dari kondisi lain yang disimulasikan.
Kapal penangkap ikan dikaitkan dengan bidang pekerjaannya yang sangat dinamis dan berisiko tinggi mengharuskan kapal memiliki stabilitas yang cukup. Kapal yang didesain dan diolah gerak dengan baik akan memberikan jaminan keselamatan operasional meskipun berada dalam kondisi cuaca yang kurang baik.
Hasil penelitian diberbagai negara, penyebab kecelakaan pada kapal penangkap ikan yang terjadi di negara maju sekalipun adalah faktor manusia (human error). Faktor manusia tersebut berhubungan dengan kurangnya kesadaran, keahlian dan keterampilan awak kapal dalam memahami aspek keselamatan pelayaran dan penangkapan ikan. Berkaitan dengan hal ini perlu pertimbangan bagi awak kapal yang terlibat dalam operasional penangkapan ikan sebelum ikut berlayar, seperti awak kapal harus berkecukupan dalam pendidikan dan pelatihan keahlian (Certificate of Competency) dan keterampilan (Certificate of Proficiency) serta memiliki kompetensi sesuai dengan aturan yang berlaku. Selain itu juga harus memahami kondisi yang disepakati dalam perjanjian kerja, prosedur dan sistem kerja di kapal penangkap ikan (Suwardjo, 2010).
Dari aspek kapal penangkap ikan, pengelolaan kapal harus dilaksanakan dengan baik guna menjamin kesuksesan kegiatan penangkapan ikan. Secara keseluruhan, keselamatan kapal akan linier dengan kompetensi awak kapal, manajemen berorientasi keselamatan dan kelaikan kapal.
Dari sisi regulasi, telah banyak kebijakan-kebijakan internasional dan nasional yang terkait dengan masalah keselamatan dilaut, namun implementasi dilapangan belum berjalan dengan baik. Oleh karena itu, pengkajian terhadap kebijakan nasional perlu dilakukan untuk mengetahui sejauh mana tanggung jawab pemerintah dan sejauh mana kebijakan nasional menampung tuntutan konvensi internasional serta memenuhi standarisasi internasional terhadap peningkatan keselamatan nelayan dan kapal-kapal ikan di Indonesia. Demikian juga dengan kebijakan internasional, secara teknis dapat menjadi salah satu masukan atau bahan pertimbangan dalam merumuskan kebijakan nasional terkait keselamatan nelayan dan kapal ikan.
Tujuan pada bab ini adalah (1) mengidentifikasi regulasi terkait keselamatan kapal ikan baik secara nasional dan internasional; (2) mengkaji dan menganalisis aspek keselamatan operasional pada kapal pole and line.
Metodologi
Metode penelitian ini adalah metode survei lapangan pada kapal-kapal pole and line yang berbasis di Pelabuhan Perikanan Samudera (PPS) Bitung, Sulawesi Utara. Pengumpulan data dimulai dengan melihat langsung aspek teknis kapal seperti kelaiklautan kapal, perlengkapan peralatan keselamatan, peralatan navigasi dan peralatan radio komunikasi diatas kapal serta sertifikasi keahlian dan kecakapan awak kapal sebagai penunjang kegiatan berlayar. Selanjutnya dilakukan identifikasi data pendukung berupa aturan-aturan secara internasional dan nasional yang terkait dengan keselamatan kapal ikan.
29
dan nasional berkenaan dengan pengaturan keselamatan kapal ikan. Analisis dimulai dari mengidentifikasi peraturan-peraturan terkait keselamatan kapal ikan baik nasional maupun internasional. Selain itu juga dilakukan telaah content analisis untuk melihat seperti apa implementasi, dampak dan kendala dari peraturan yang ada.
Hasil dan Pembahasan
Elemen penting dalam usaha penangkapan ikan salah satunya adalah kapal. Armada kapal penangkap pole and line yang berlokasi di Pelabuhan Perikanan Samudera (PPS) Bitung cukup bervariasi. disampaikan pada Tabel 9.
Tabel 9 Jumlah kapal pole and lineyang beraktifitas di PPS Bitung.
Tonage ≤ 10 GT 11 - 30 GT 31 - 60 GT 61 - 100 GT
Jumlah 1 8 8 21
Sumber : Statistik PPS Bitung, 2012
Tabel diatas menunjukkan bahwa jumlah kapal pole and line tergolong berukuran besarsehingga menuntut saranapenangkapan ikan seperti kapal dalam keadaan laik laut. Kondisi kapal yang kurang baik akan mempengaruhi usaha penangkapan ikan. Terkait hal tersebut, maka diharapkan aspek keselamatan kapal penangkap ikan guna menjamin keberhasilan kegiatan penangkapan perlu menjadi perhatian. Salah satu bentuk perhatian dan kesadaran stakeholder didalam menjamin keselamatan kapal ikan adalah kapal harus laik laut dari segi desain, tata ruang diatas kapal, perlengkapan peralatan keselamatan dan radio komunikasi serta peralatan navigasi. Disisi lain, bentuk perhatian dari pemerintah yaitu pengaturan kebijakan terkait keselamatan kapal ikan.
Sebanyak 38 unit kapal pole and line dilakukan pengamatan berkenaan dengan aspek keselamatannya. Kapal pole and line yang diukur untuk mengetahui kesesuaian desain dan kualitas stabilitas adalah berukuran 25GT. Hal lain yang harus diperhatikan adalah sumberdaya manusia awak kapal. Unsur awak kappal juga merupakan unsur penting guna memaksimalkan sarana kapal penangkap dan alat penangkap ikan yang digunakan. Oleh karena itu, awak kapal yang terampil dan bersertifikat sangat penting dalam keberhasilan usaha perikanan tangkap yang pada akhirnya dapat membantu mewujudkan keberhasilan kegiatan penangkapan dan keselamatan dalam pelayaran.
Selama beberapa kurun waktu, terjadi kecelakaan kapal ikan perairan Bitung, Sulawesi Utara. Kecelakaan kapal disebabkan karena beberapa hal yaitu faktor teknis seperti kondisi kapal yang tidak laik laut dan kondisi cuaca yang kurang baik. Faktor non teknis seperti kesalahan manusia (human error) juga sebagai penyebab kecelakaan kapal diantaranya kurangnya kesadaran awak kapal dalam hal keselamatan dan kurangnya kemampuan atau keahlian daripada awak kapal dalam melayarkan kapal atau melakukan kegiatan penangkapan ikan.