SISTEM PENGAMANAN SEPEDA MOTOR DENGAN
SENSOR VIBRATOR MENGGUNAKAN SMS GATE WAY
BERBASIS ATMEGA8535
TUGAS AKHIR
RAMDANI
122408012
PROGRAM STUDI D-3 FISIKA
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATRA UTARA MEDAN
SISTEM PENGAMANAN SEPEDA MOTOR DENGAN
SENSOR VIBRATOR MENGGUNAKAN SMS GATE WAY
BERBASIS ATMEGA8535
TUGAS AKHIR
Diajukan Untuk Melengkapi Tugas Dan Memenuhi Syarat Memperoleh Ahli Madya
RAMDANI
122408012
PROGRAM STUDI D-3 FISIKA
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATRA UTARA MEDAN
PERSETUJUAN
Judul : Sistem Pengamanan Sepeda Motor Dengan Sensor Vibrator Menggunakan SMS Gate Way
Berbasis ATMega8535
Kategori : Tugas Akhir
Nama : RAMDANI
Nomor Induk Mahasiswa : 122408012
Program Studi : Diploma 3 (D-3) Fisika
Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatra Utara
Disetujui di Medan, April 2015
Disetujui Oleh
Ketua Program Studi Pembimbing,
LEMBAR PERNYATAAN
SISTEM MONITORING LEVEL TEKANAN TABUNG GAS LPG DENGAN TAMPILAN LCD DAN SMS GATE WAY BERBASIS
ATMEGA8535
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil karya sendiri. Kecuali beberapakutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, April 2015
i
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Kuasa, dengan limpahan berkat-NYA penyusunan Tugas Akhir ini dapat diselesaikan dalam waktu yang ditetapkan.
Ucapan terima kasih penulis sampaikan kepada berbagai pihak yang telah banyak membantu penulis dalam penyelesaian Tugas Akhir ini yaitu kepada:
1. Bapak Prof. Dr. Sutarman, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Ibu Dr. Marpongahtun, M.Sc selaku Pembantu Dekan I Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara. 3. Ibu Dr. Susilawati, M.Si selaku ketua Program Studi D-3 Fisika Fakultas
Matematika dan Ilmu Pengetahuan Alam universitas Sumatera Utara. 4. Bapak Dr. Takdir Tamba, M.Eng.Sc, selaku pembimbing yang telah
membimbing dan mengarahkan kepada penulis dalam menyelesaikan Tugas Akhir ini.
5. Seluruh Staf Pengajar / Pegawai program studi fakultas MIPA Universitas Sumatera Utara.
6. Ayahanda dan Ibunda tercinta yang telah memberikan bantuan berupa dukungan moril dan materil yang sangat membantu dalam menyelesaikan Tugas Akhir ini.
7. Senior kami Fathurrahman yang telah memberikan bantuan berupa ilmu dan motivasi dalam menyelesaikan Tugas Akhir ini.
8. Rekan Fisika Instrumentasi D3 yang memberikan bantuan penulis untuk menyelesaikan Laporan ini.
9. Semua pihak yang turut membantu dalam pengerjakan Tugas Akhir yang tidak dapat disebutkan satu persatu.
ii
SISTEM PENGAMANAN SEPEDA MOTOR DENGAN SENSOR VIBRATOR MENGGUNAKAN SMS GATE WAY BERBASIS
ATMEGA8535
ABSTRAK
Tingkat kriminalitas di negara ini semakin tinggi, khususnya angka kriminalitas pencurian sepeda motor. Salah satu faktor penyebab tingginya tingkat pencurian sepeda motor ini adalah kurang efektifnya sistem security atau keamanan pada kendaraan bermotor sekarang ini. Penelitian ini bertujuan untuk membuat sebuah sistem keamanan sepeda motor yang dikontrol melalui perangkat seluler berbasis SMS.
Sehingga memberikan rasa aman bagi pengguna kendaraan yang ditinggal jauh dari area parkir, dan memaksimalkan handphone dalam sistem otomasi dan pemanfaatan mikrokontroller yang saling bersinergi menghasikan sebuah alat yang creative dan innovative. Perangkat keras yang digunakan adalah mikrokontroler ATMEGA8535, handphone, dan modem serial. Hasil dari penelitian ini adalah terciptanya sebuah keamanan sepeda motor via sms dengan control jarak jauh melalui pesan yang dikirim menggunakan sms.
iii
2.2.1. Karakteristik Sinyal Port Serial ... 8
2.2.2. Port Komunikasi Serial ... 9
2.2.3. MAX 232 ... 11
2.3 Sensor Getar HDX-2 ... 13
2.3.1. Spesifikasi Sensor Getar HDX-2 ... 14
2.3.2. Aplikasi Sensor Getar HDX-2 ... 14
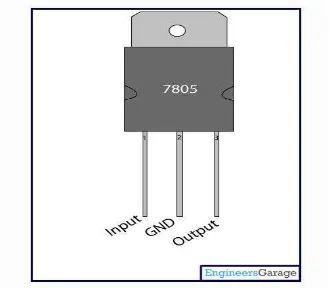
2.4 IC 7805 Regulator Tegangan ... 15
2.6. Mikrokontroller ATmega8535 ... 20
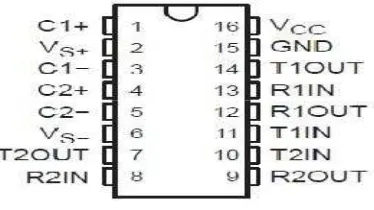
2.6.1. Konfigurasi Pin ATmega8535 ... 21
2.6.2. Deskripsi pin-pin pada Mikrokontroler ATmega8535 ... 22
2.6.3. Peta Memory ATMega8535 ... 26
2.6.4. Status Register (SREG) ... 28
2.7 LCD ( Liquid Crystal Display ) ... 28
2.8 Relay ... 33
2.8.1. Jenis-Jenis Relay ... 34
BAB III. PERANCANGAN DAN PEMBUATAN ... 36
3.1. Diagram Blok Rangkaian ... 36
3.1.1. Fungsi Tiap Blok ... 37
3.2. Rangkaian Penstabil Tegangan (Regulator) ... 37
3.3. Rangkaian Mikrokontroler ATmega8535 ... 38
iv
3.5. Rangkaian Wavecom fastrack ... 40
3.6. Rangkaian Sensor Getar ... 41
3.7. Rangkaian Serial Max232 ... 41
3.8. FLOWCHART SISTEM ... 43
\ BAB IV. HASIL DAN PEMBAHASAN ... 44
4.1. Pengujian Rangkaian Regulator ...44
4.2. Pengujian Rangkaian Mikrokontroller Atemga8535 ... 44
4.3. Intefacing LCD 2 x 16 ... 45
4.4. Pengujian koneksi modul GSM Wavecom dengan Mikrokontroller ATmega8535 via serial max 232 ... 47
4.5. Pengujian Rangkaian Sensor Getar ... 50
BAB V. PENUTUP ... 53
5.1. Kesimpulan ... 53
5.2. Saran ... 54
DAFTAR PUSTAKA ... 55
LAMPIRAN
v
DAFTAR TABEL
Halaman Tabel 2.1 Fungsi Susunan Konektor DB9 10
Tabel 2.2 Nama – Nama Register 11
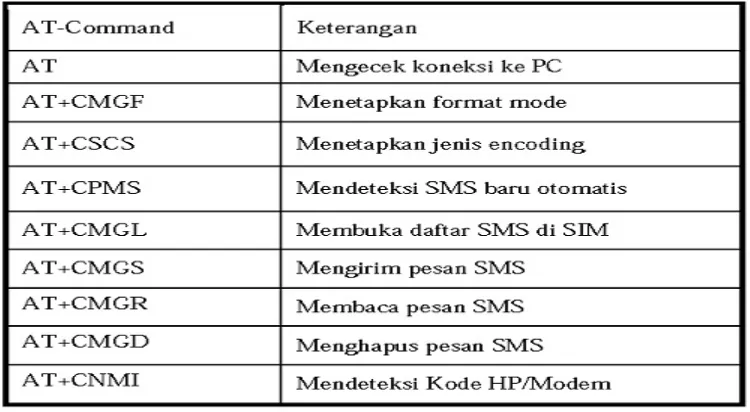
Tabel 2.3 Tabel Set At-Command 19
Tabel 2.4 Operasi Dasar LCD 30
Tabel 2.5 Konfigurasi Pin LCD 31
vi Gambar 3.3 Rangkaian system minimum mikrokontroller
Atemega8535 38 Gambar 4.2 Informasi Signature Mikrokontroler 45
Gambar 4.3 Pengujian LCD 47
Gambar 4.4 Pengiriman SMS Di LCD 49
Gambar 4.5 SMS Terkirim ke Handphone 50
Gambar 4.6 Tampilan LCD Ketika Sensor ada Getar 52
ii
SISTEM PENGAMANAN SEPEDA MOTOR DENGAN SENSOR VIBRATOR MENGGUNAKAN SMS GATE WAY BERBASIS
ATMEGA8535
ABSTRAK
Tingkat kriminalitas di negara ini semakin tinggi, khususnya angka kriminalitas pencurian sepeda motor. Salah satu faktor penyebab tingginya tingkat pencurian sepeda motor ini adalah kurang efektifnya sistem security atau keamanan pada kendaraan bermotor sekarang ini. Penelitian ini bertujuan untuk membuat sebuah sistem keamanan sepeda motor yang dikontrol melalui perangkat seluler berbasis SMS.
Sehingga memberikan rasa aman bagi pengguna kendaraan yang ditinggal jauh dari area parkir, dan memaksimalkan handphone dalam sistem otomasi dan pemanfaatan mikrokontroller yang saling bersinergi menghasikan sebuah alat yang creative dan innovative. Perangkat keras yang digunakan adalah mikrokontroler ATMEGA8535, handphone, dan modem serial. Hasil dari penelitian ini adalah terciptanya sebuah keamanan sepeda motor via sms dengan control jarak jauh melalui pesan yang dikirim menggunakan sms.
1 BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Tingkat kriminalitas di negara ini semakin tinggi, khususnya angka
kriminalitas pencurian sepeda motor. Salah satu faktor penyebab tingginya tingkat
pencurian sepeda motor ini adalah kurang efektifnya sistem security atau
keamanan pada kendaraan bermotor sekarang ini. Sistem alarm sepeda motor
dengan menggunakan saklar kombinasi. Saklar kombinasi menyebabkan mesin
kendaraan tidak dapat dihidupkan bila kombinasi saklar yang dilakukan tidak
benar. Saklar-saklar ini biasanya letaknya tersembunyi, namun biasanya pencuri
dapat mengetahuinya, dengan menelusuri perkabelan dari sistem ignition sepeda
motor.
Meningkatnya kebutuhan masyarakat dalam penggunaan perangkat keamanan pada sepeda motor mendorong dibuat perangkat pengaman sepeda motor. Sistem pengaman ini menggunakan sensor getar yang dihubungkan pada sepeda motor. Sensor getar ini akan mendeteksi adanya perubahan posisi pada kendaraan dan mengirimkan sinyal pada pemilik kendaraan sepeda motor. Sistem pengaman sepeda motor dirancang dengan memanfaatkan SMS (short message service) sebagai media transmisi informasinya. Alat ini dirancang dengan
menggunakan sensor getar yang dihubungkan pada rangkain. Pengendali rangkaian utama pada pemancar dihubungkan dengan relay yang berfungsi untuk mengaktifkan pemancar dan memutuskan sistem pengapian sepeda motor.
2 1.2 Rumusan Masalah
Sesuai latar belakang yang telah diuraikan di atas, maka dapat dirumuskan sebuah pokok permasalahan yaitu “Sistem Pengamanan Sepeda Motor dengan Sensor Vibrator Menggunakan SMS Gate Way Berbasis ATMega8535”. Dari
pokok permasalahan tersebut dapat ditentukan rumusan permasalahan antara lain: 1. Bagaimana cara merancang sistem pengamanan kendaraan bermotor
(sepeda motor) menggunakan mikrokontroler?
2. Bagaimana melakukan kendali sistem pengaman kendaraan bermotor (sepeda motor) berbasis mikrokontroler menggunakan teknologi SMS (short message service)?
3. Bagaimana membuat ponsel GSM dan Mikrokontroler dapat berkomunikasi?
.
1.3 Tujuan Penulisan
Adapun Tujuan dari penulisan tugas akhir ini sebagai berikut :
1. Memanfaatkan teknologi SMS Gateway untuk system pengamanan kendaraan sebagai penginformasi.
2. Memanfaatkan sensor getar sebagai pengaman system keamanan kendaraan ketika terdetiksi getar.
3 1.4 Batasan Masalah
Dalam perencanaan penulisan ini terdapat beberapa batasan masalah sebagai berikut:
1. Rangakaian Mikrokontroller yang di gunakan adalah mikrokontroller ATMega8535.
2. Modem GSM wavecome fastracke yang digunakan adalah M1306b yang berguna sebagai SMS gateway,tidak dapat menelfon (tidak dapat melihat pulsa) hanya media sebagai menerima dan mengirim SMS
3. Sim Card yang di gunakan di dalam Modem Wavecome adalah kartu Indosat.
4. Sensor yang digunakan HDX-2 Analog Vibration Sensor. 5. Tidak membahas mengenai komunikasi Mobile Phone
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan penulisan laporan ini, penulis membuat susunan bab – bab yang membentuk laporan ini dalam sistematika penulisan laporan dengan urutan sebagai berikut :
BAB 1 PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, tujuan penulisan, batasan masalah, serta sistematika penulisan.
BAB 2 LANDASAN TEORI
4
pembahasan dan cara kerja dari rangkaian dan bahasa program yang digunakan, serta karakteristik dari komponen-komponen pendukung.
BAB 3 PERANCANGAN DAN PEMBUATAN
Bab ini berisikan tentang proses perancangan dan pembuatan alat. Mulai dari peancangan dan pembuatan system secara hardware atau software
BAB 4 HASIL DAN PEMBAHASAN
Dalam bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai rangkaian-rangkaian yang digunakan, penjelasan mengenai program yang diisikan ke mikrokontroller ATMega8535
BAB 5 PENUTUP
5 BAB II
LANDASAN TEORI
Dalam Bab ini penulis akan membahas tentang komponen- komponen yang di gunakan dalam rangkaian alat ini. Agar pembahasan tidak melebar dan menyimpang dari topik utama laporan, maka setiap komponen hanya di bahas sesuai fungsi nya pada masing- masing unit nya.
2.1 Bahasa Pemograman C
Bahasa C dikembangkan pada Lab Bell pada tahun 1978, oleh Dennis Ritchi dan Brian W. Kernighan. Pada tahun 1983 dibuat standar C yaitu stnadar ANSI (American National Standards Institute), yang digunakan sebagai referensi dari berbagai versi C yang beredar dewasa ini termasuk Turbo C.
Dalam beberapa literature, bahasa C digolongkan bahasa level menengah karena bahasa C mengkombinasikan elemen bahasa tinggi dan elemen bahasa rendah. Kemudahan dalam level rendah merupakan tujuan diwujudkanya bahasa C. pada tahun 1985 lahirlah pengembangan ANSI C yang dikenal dengan C++ (diciptakan oleh Bjarne Struostrup dari AT % TLab). Bahasa C++ adalah pengembangan dari bahasa C. bahasa C++ mendukung konsep pemrograman berorientasu objek dan pemrograman berbasis windows.
6
adalah sebuah fungsi yang tidak memiliki tipe data kembalian (void). Hingga kini bahasa ni masih popular dan penggunaannya tersebar di berbagai platform dari windows samapi linux dan dari PC hingga main frame.
Ada pun kekurangan dan Kelebihan Bahasa C sebagai berikut : Kelebihan Bahasa C:
· Bahasa C tersedia hampir di semua jenis computer.
· Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis computer.
· Bahasa C hanya menyediakan sedikit kata-kata kunci. hanya terdapat 32 kata kunci.
· Proses executable program bahasa C lebih cepat · Dukungan pustaka yang banyak.
· C adalah bahasa yang terstruktur
· Bahasa C termasuk bahasa tingkat menengah
Penempatan ini hanya menegaskan bahwa c bukan bahasa pemrograman yang berorientasi pada mesin. yang merupakan ciri bahasa tingkat rendah. Melainkan berorientasi pada obyek tetapi dapat dinterprestasikan oleh mesin dengan cepat. secepat bahasa mesin. inilah salah satu kelebihan c yaitu memiliki kemudahan dalam menyusun programnya semudah bahasa tingkat tinggi namun dalam mengesekusi program secepat bahasa tingkat rendah.
Kekurangan Bahasa C:
· Banyaknya operator serta fleksibilitas penulisan program kadang-kadang membingungkan pemakai.
7 2.1.1 Struktur Bahasa C
a. Program bahasa C tersusun atas sejumlah blok fungsi.
b. Setiap fungsi terdiri dari satu atau beberapa pernyataan untuk melakukan suatu proses tertentu.
c. Tidak ada perbedaan antara prosedur dan fungsi.
d. Sstiap program bahasa C mempunyai suatu fungsi dengan nama “main” (Program Utama).
e. Fungsi bisa diletakkan diatas atau dibawah fungsin “main”. f. Setiap statemen diakhiri dengan semicolon (titik koma).
2.1.2 Pengenal
Pengenal (identifier) merupakan sebuah nama yang didefenisikan oleh pemrograman untuk menunjukkan indetitas dari sebuah konstanta, variable, fungsi, label atau tipe data khusus. Pemberian nama sebuah pengenal dapat ditentukan bebas sesuai keinginan pemrogram tetapi harus memenuhi atura berikut :
Karakter pertama tidak boleh menggunakan angka
Karakter kedua dapat berupa huruf, angka, atau garis bawah. Tidak boleh menggunakan spasi.
Bersifat Case Sensitive, yaitu huru capital dan huruf kecil dianggap berbeda.
8 2.2 Komunikasi Serial
Pada PC / laptop standar, biasanya terdapat sebuah port untuk komunikasi serial. Pada prinsipnya, komunikasi serial ialah komunikasi dimana pengiriman data dilakukan per bit, sehingga lebih lambat dibandingkan komunikasi parallel seperti pada port printer yang mampu mengirim 8 bit sekaligus dalam sekali detak. Beberapa contoh penerapan komunikasi serial ialah mouse, scanner dan sistem akuisisi data yang terhubung ke port serial COM1/COM2. Sistem antar muka komunikasi serial RS232 sering digunakan sebagai antar muka antara komputer dengan mikrokontroler. Agar level tegangan data serial dari mikrokontroler setara dengan level tegangan komunikasi port serial PC, diperlukan MAX232 untuk mengubah ke tegangan TTL/CMOS logic level RS232. MAX232 menggunakan sistim komunikasi simplex sehingga difungsikan untuk mengubah dari arus dan tegangan logika TTL menjadi arus tegangan logika komputer (RS232).
2.2.1 Karakteristik Sinyal Port Serial
Standar sinyal komunikasi serial yang banyak digunakan adalah Standar RS232 yang dikembangkan oleh Electronic Industri Association (EIA/TIA) yang pertama kali dipublikasikan pada tahun 1962.Ini terjadi jauh sebelum IC TTL populer sehingga sinyal ini tidak ada hubungan sama sekali dengan level tegangan IC TTL. Standar ini hanya menyangkut komunikasi antara (Data Terminal Equipment – DTE) dengan alat – alat pelengkap komputer (Data Circuit Terminating Equipment – DCE).
9
• Logika 1 disebut ‘Mark’ terletak antara -3 Volt sampai -25 Volt • Logika ‘0’ disebut ‘space’ terletak antara +3 Volt samapai +25 Volt. • Daerah tegangan antara -3 Volt sampai +3 Volt adalah invalid level, yaitu
daerah tegangan yang tidak memiliki level logika pasti sehingga harus dihindari. Demikian juga level tegangan dibawah -25 Volt dan diatas +25 Volt juga harus dihindari karena bisa merusak line driver pada saluran RS232.
2.2.2 Port Komunikasi Serial
Komunikasi serial membutuhkan port sebagai saluran data. Berikut tampil port serial DB9 yang umum digunakan sebagai port serial.
Gambar 2.1 Port DB9 Jantan
Gambar 2.2 Port DB9 Betina
10
dihubungkan dengan SG di pasangan, dan masing masing pin DTR, DSR dan CD dihubung singkat, dan pin RTS dan CTS dihubung singkat di setiap devais.
Gambar.2.3 Susunan Pin Konektor DB9
Tabel 2.1 Fungsi Susunan Konektor DB9
11
Tabel 2.2 Nama – Nama Register
Keterangan Register
• RX Buffer , digunakan untuk menampung dan menyimpan data dari DCE. • TX Buffer , digunakan untuk menampung dan menyimpan data yang akan
dikirim ke port serial.
• Baud Rate Divisor Latch LSB , digunakan untuk menampung byte bobot rendah untuk pembagi clock pada IC UART agar didapat baud rate yang tepat.
• Baud Rate Divisor Latch MSB , digunakan untuk menampung byte bobot tinggi untuk pembagi clock pada IC UART sehingga total angka pembagi adalah 4 byte yang dapat dipilih dari 0001h sampai FFFFh.
2.2.3 Konverter MAX232
12
mengubah sinyal RX, TX, CTS dan RTS. MAX232 mencakup tegangan generator yang berkapasitas yang digunakan untuk menyuplai input dari hardware pada tegangan 5 V. MAX 232 memiliki ambang khas dari 1,3 V, histeresis khas 0,5 V, dan dapat menerima input ± 30-V.
Gambar 2.4 IC MAX232
Gambar 2.5 Konfigurasi IC MAX232
Komunikasi serial ialah pengiriman data secara serial (data dikirim satu persatu secara berurutan), sehingga komunikasi serial jauh lebih lambat daripada komunikasi paralel. Serial port lebih sulit ditangani karena peralatan yang dihubungkan ke serial port harus berkomunikasi dengan menggunakan transmisi serial, sedang data di komputer diolah secara paralel.
13
paralel yang menggunakan level TTL berkisar dari 0 V untuk logika 0 dan +5 Volt untuk logika 1. Umumnya sinyal serial diawali dengan start bit, data bit dan sebagai pengecekan data menggunakan parity bit serta ditutup dengan 2 stop bit. Level tengangan -3 V hingga +3 V dianggap sebagai undetermined region.
Gambar 2.6 Merupakan penggunaan ic max 232 dalam rangkaian sebagai
komunikasi serial.
2.3 Sensor Getar HDX-2
14
Gambar 2.7 Sensor HDX-2 Vibrator
Sensor ini tidak memiliki orientasi, pendeteksian dari mikrokontroler / rangkaian pengendali cukup dengan mengukur perubahan hambatan (resistansi) yang sejalan dengan intensitas getaran / guncangan. Komponen elektronika ini mengkonsumsi arus kurang dari 10 mA, dapat beroperasi pada suhu di bawah 130°C.
2.3.1 Spesifikasi Sensor HDX-2 Vibrator
Spesifikasi dari sensor getar HDX-2 ialah:
1. karakteristik kerja : tidak ada posisi , tahan getaran ukuran ketika intensitas bervariasi dengan getaran .
2. penampilan produk paket kontrol termal , tahan air , kelembaban dan debu 3. karakteristik listrik:
tegangan < 24 v saat ini < 1mA suhu < 80 * c
2.3.2 Aplikasi Sensor HDX-2 Vibrator
15 2.4 IC 7805 Regulator Tegangan
Regulator ini menghasilkan tegangan output stabil 5 Volt dengan syarat tegangan input yang diberikan minimal 7-8 Volt (lebih besar dari tegangan output) sedangkan batas maksimal tegangan input yang diperbolehkan dapat dilihat pada datasheet IC 78XX karena jika tidak maka tegangan output yang dihasilkan tidak akan stabil atau kurang dari 5 Volt.
Keunggulan
Jika dibandingkan dengan regulator tegangan lain, seri 78XX ini mempunyai keunggulan di antaranya.
1. Untuk regulasi tegangan DC, tidak memerlukan komponen elektronik tambahan.
2. Aplikasi mudah dan hemat ruang
3. Memiliki proteksi terhadap overload (beban lebih), overheat (panas lebih), dan hubungsingkat
4. Dalam keadaan tertentu, kemampuan pembatasan arus peranti 78XX tidak hanya melindunginya sendiri, tetapi juga melindungi rangkaian yang ditopangnya. (Wikipedia)
Kekurangan
1. Tegangan input harus lebih tinggi 2-3 Volt dari tegangan output sehingga IC 7805 kurang tepat jika digunakan untuk menstabilkan tegangan battery 6 Volt menjadi 5 Volt.
16
terjadi terjadi panas pada IC regulator 7805 sehingga diperlukan heatsink (pendingin) yang cukup.
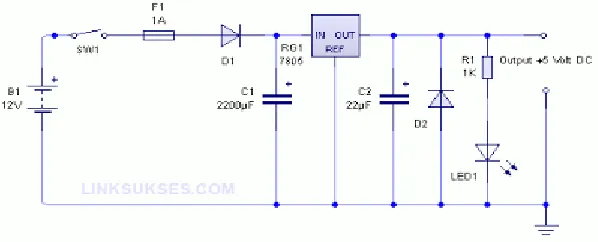
2.4.1 Cara Kerja IC 7805
Ketika switch (S1) ditutup (On), arus dari sumber DC 12 Volt akan mengalir menuju fuse (F1) yang berfungsi sebagai pengaman hubungsingkat, kemudian akan mengalir melalui dioda (D1) yang berfungsi sebagai pengaman polaritas. Condensator C1 yang berfungsi sebagai filter dapat dihilangkan jika tegangan input merupakan tegangan DC stabil misalnya dari sumber battery (accu/aki).
Setelah melalui IC 7805, tegangan akan diturunkan menjadi 5 Volt stabil. Fungsi C2 adalah sebagai filter terakhir yang berfungsi mengurangi noice (ripple tegangan) sedangkan LED1 yang dipasang seri dengan resistor (R1) berfungsi sebagai indicator.
Gambar 2.8 IC 7805 Regulator
2.4.2 Fungsi IC 7805
17
Gambar 2.9 Rangkaian IC 7805
2.5 Modem GSM
Modem adalah sebuah alat yang dapat membuat komputer terkoneksi dengan internet melalui line telepon standar. Kata Modem itu sendiri merupakan kependekan dari Modulator Demodulator. Ini berarti Modem bekerja dengan cara mengubah informasi digital dari komputer pengirim ke dalam bentuk sinyal analog yang ditransmisikan melalui line telepon.
Selanjutnya Modem pada komputer penerima akan mengubah ulang sinyal analog ke sinyal digital. Modem GSM adalah sebuah perangkat Modem Wireless Plug and Play dengan konektivitas GSM/GPRS untuk aplikasi-aplikasi machine to machine. GSM Modul atau Modem GSM adalah jenis khusus dari modem yang menerima kartu SIM, dan mengoperasikan selama berlangganan ke operator mobile, seperti ponsel. Modem GSM dihubungkan dengan suatu interface yang memungkinkan aplikasi seperti SMS untuk mengirim dan menerima pesan melalui Modem. Beberapa fungsi kegunaan modem ini di masyarakat adalah antara lain:
18 o SMS Polling
o SMS auto-reply o M2M integration o Aplikasi Server Pulsa o Telemetri
o Payment Point Data
Pada pembuatan proyek ini, digunakan Modem GSM Serial Wavecom Fastrack M1306B. Untuk Modem seri ini memiliki dua type konektor yaitu serial dan USB.
Gambar 2.10 Modem GSM Fastrack M1306B
Spesifikasi modem WAVECOM FASTRACK M1306B: Dual-band GSM 900/1800MHZ & GPRS Class 10 GSM Dual Band antenna
Power Supply with 4 pin connector (untuk serial)
Standard USB 2.0 interface (untuk USB) Input Voltage : 5V-32V
19 Support AT-Command
Dimensi : 74×54×25mm
2.5.1 AT-Command
AT-Command adalah singkatan dari Attention Command. AT Command adalah perintah yang digunakan dalam komunikasi dengan serial port. Pada awalnya standar perintah ini untuk modem-modem telepon PSTN, akan tetapi perintah ini sekarang dikembangkan juga untuk modem-modem GSM.
Perintah AT-Command dapat diberikan kepada handphone atau GSM/CDM modem untuk melakukan sesuatu hal, termasuk untuk mengirim dan menerima SMS. Dengan memberikan perintah ini di dalam komputer/ mikrokontroller maka perangkat kita dapat melakukan pengiriman atau penerimaan SMS secara otomatis untuk mencapai tujuan tertentu. Untuk memulai suatu perintah AT-Command, diperlukan prefiks “AT” atau “at” dalam setiap perintah AT-Command.
20 2.5.2 Database
Database merupakan sekumpulan data yang terintegrasi yang diorganisasi untuk memenuhi kebutuhan pemakai untuk keperluan organisasi yang dimana dapat dipakai hanya sekali atau berulang yang dimana dalam bentuk digital. Salah satu komponen penting dalam penggunaan database adalah DataBase Management System (DBMS). DBMS ini bertugas untuk menangani semua akses ke database dan bertanggug jawab untuk menerapkan pemeriksaan otorisasi dan prosedur validasi.
2.6 Mikrokontroler ATMega8535
Mikrokontroler dapat dianalogikan sebagai sebuah sistem komputer yang dikemas dalam sebuah chip, artinya di dalam sebuah IC mikrokontroler sebetulnya sudah terdapat kebutuhan minimal agar mikroprosesor dapat bekerja, yaitu meliputi mikroprosesor, ROM, RAM, I/O dan clock seperti halnya yang dimiliki oleh sebuah PC. Mengingat kemasannya yang berupa sebuah chip dengan ukuran yang relatif lebih kecil, tentu saja spesifikasi dan kemampuan yang dimiliki oleh mikrokontroller akan menjadi lebih rendah bila dibandingkan dengan sistem komputer seperti PC baik dilihat dari segi kecepatannya. Tidak seperti system komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja.
21
fleksibel dan praktis digunakan terutama pada sistem-sistem yang relatif tidak terlalu kompleks atau tidak memerlukan bahan komputasi yang tinggi.
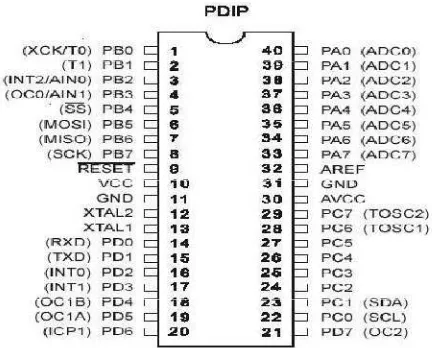
2.6.1 Konfigurasi Pin ATMega8535
Mikrokontroler ATMega8535 memiliki 40 pin untuk model PDIP ditunjukkan pada Gambar 2.2, dan 44 pin untuk model TQFP dan PLCC. Nama-nama pin pada mikrokontroler ini adalah :
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya digital.
2. GND merupakan pin ground untuk catu daya digital.
3. Port A (PA0...PA7) merupakan pin I/O 8bit dua arah(bi-directional) dan pin masukan 8 chanel ADC.
4. Port B (PB0 – PB7) merupakan akan pin I/O 8 bit dua arah (bi-directional)dengan resistor pull-up internal dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI.
5. Port C (PC0 – PC7) merupakan pin I/O 8bit dua arah (bi-directional)dan pin fungsi khusus, yaitu TWI, komperator analog, input ADC dan Timer Osilator.
6. Port D (PD0 – PD7) merupakan pin I/O 8 bit dua arah(bi-directional) dan pin fungsi khusus, yaitu komperator analog, interupsi eksternal dan komunikasi serial.
7. RESET merupakan pin yang digunakan untuk mereset mikrokontroler. 8. XTAL1 merupakan input ke penguat osilator pembalik dan input ke
22
9. XTAL2 merupakan out put dari penguat oslator pembalik.
10. AVCC merupakan pin masukan tegangan untuk ADC yang terhubung ke portA.
11. AREF merupakan pin tegangan referensi analog ADC.
Gambar 2.11 Konfigurasi Pin ATMega8535
2.6.2 Deskripsi pin-pin pada mikrokontroler ATMega8535 :
1. Port A
23 2. Port B
Merupakan 8-bit dua arah(bi-directional) port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output.Selain sebagai port I/O 8 bit port B juga dapat difungsikan secara individu sebagai berikut:
1. PB7: SCK ( SPI Bus Serial Clock)
2. PB6: MISO( SPI Bus Master Input/ Slave Out put) 3. PB5: MOSI( SPI Bus Master Output/Slave Input). 4. PB4: SS (SPI Slave Select Input)
5. PB3: AIN1(Analog Comparator Negatif Input) OC0 (Out put Compare Timer/counter 0)
6. .PB2: AIN0 (Analog Comparator Positif Input) INT2 (External Interrupt 2 Inpt)
7. PB1:T1 (Timer/Counter 1 External Counter Input)
8. PB0:T0 (Timer/Counter 0 External Counter Input) XCK (USART External Clock Input/Output)
3. Port C
24
LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum Port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, Port C juga difungsikan secara individu sebagai berikut:
1. PC7: TOSC2 (Timer Oscillator 2) 2. PC6: TOSC1 (Timer Oscillator 1) 3. PC1: SDA (Serial Data Input/Output) 4. PC0: SCI (Serial Clock)
4. Port D
Merupakan Port I/O 8-bit dua arah (bi-directional) . Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif khusus sebagai berikut:
1. PD7: OC2 ( Ouput Compare Timer/Counter 1) 2. PD6: ICP1 ( Timer Counter 1 input capture)
3. PD5: OC1A ( Output Compare A Timer /Counter1) 4. PD4: OC1B ( Output Compare B Timer/Counter 1) 5. PD3: INT1 ( External Interrupt 1 Input)
25 7. PD1: TXD ( USART Transmit) 8. PD0: RXD ( USART Receive) 5. RESET
RST pada pin 9 merupakan pin reset yang akan bekerja bira diberi pulsa rendah (aktif Low) selama minimal 1,5us.
6. XTAL2
Merupakan out put dari penguat dari osilator pembalik 7. XTAL1
Merupakan input ke penguat osilator pembalik dan input ke internal clock.
8. AVCC
Avcc adalah pin masukan catu daya yang digunakan untuk masukan analog ADC yang terhubung ke Port A. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
9. AREF
AREF adalah pin masukan referensi analog untuk ADC. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus dibeikan ke kaki ini.
10. AGND
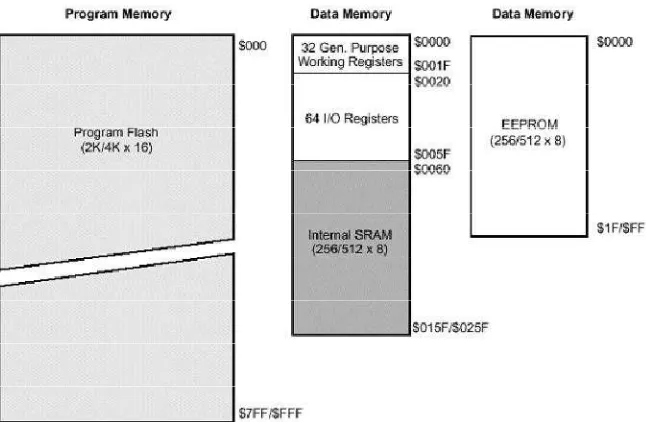
26 2.6.3 Peta Memory ATMega8535
Mikrokontroller ATMega8535 memiliki 3 jenis memori yaitu memori program, memori data dan memori EEPROM.Ketigannya memiliki ruang-ruang tersendiri dan terpisah seperti terlihat pada gambar 2.14
Gambar 2.12 Organisasi memori ATMega8535
a. Memori Program
ATMega8535 memiliki kapasitas memori program sebesar 8 Kbyte yang terpetakan dari alamat 0000h – 0FFFh dimana masing-masing alamat memiliki lebar data sebesar 16 bit.Sehingga organisasi memori program seperti ini sering dituliskan dengan 4K x 16 bit.Memori program ini juga terbagi menjadi dua yaitu program boot dan juga bagian program aplikasi.
b. Memori Data
27
R0 – R31. 64 byte berikut nya digunakan untuk register I/O yang digunakan untuk mengatur fasilitas timer /counter, interrupsi, ADC, USART, SPI, EEPROM dan port I/O seperti Port A, Port B, Port C, dan Port D. Selanjutnya 512 byte diatasnya digunakan untuk memory data SRAM .
Jika register-register I/O diatas diakses seperti mengakses data pada memori ( Jika kita menggunakan instruksi LD atau ST ) maka register I/O diatas menempati alamat 0020-005F. Tetapi jika register-register I/O diakses seperti mengakses I/O pada umumnya ( menggunakan instruksi IN/ IOUT) maka register I/O diatas menempati alamat memori 0000h – 003Fh.
Gambar 2.13 (a) Register I/O Sebagai Memori Data, (b) Register I/O sebagai
I/O
c. Memori EEPROM
28
I/O yaitu register EEPROM Addres ( EEARH-EEARL), register EEPROM Data (EEDR) dan register EEPROM control ( EECR). Untuk megakses memory EEPROM ini diperlakukan sperti mengakses data eksternal sehingga waktu dari eksekusi relatif lebih lama dibadingkan jika kita mengakses data dari SRAM.
2.6.4 Status Register ( SREG)
Register SREG digunakan untuk menyimpan informasi dari hasil operasi aritmatika yang terakhir . Informasi-informasi dari register SREG dapat digunakan untuk mengubah alur program, yang sedang dijalankan dengan mengunakan instruksi percabangan . Data SREG akan selalu berubah jika setiap instruksi atau operasi pada ALU dan datanya tidak otomatis tersimpan apabila terjadi instruksi percabangan baik karena instruksi maupun lompatan.
2.7 LCD (Liquid Crystal Display)
29
Gambar 2.17 LCD 2x16
LCD memanfaatkan silicon atau gallium dalam bentuk Kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom. Dalam keadaan normal, cairan yang digunakan memiliki warna cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pad sisi dalam lempeng kaca bagian depan.
Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa microampere), sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang kecil. Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari. Di bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan.
LCD yang digunakan adalah jenis LCD yang menampilkan data dengan 2 baris tampilan pada display. Keuntungan dari LCD ini adalah :
1. Dapat menampilkan karakter ASCII, sehingga dapat memudahkan untuk membuat program tampilan.
2. Mudah dihubungkan dengan port I/O karena hanya mengunakan 8 bit data dan 3 bit control.
30
4. Daya yang digunakan relative sangat kecil.
Gambar 2.15 Konfigurasi Pin LCD
Operasi dasar pada LCD terdiri dari empat, yaitu instruksi mengakses proses internal, instruksi menulis data, instruksi membaca kondisi sibuk, dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, tiap karakter dengan huruf 5x7 dot matrik. Kapasitas pembangkit RAM 8 tipe karakter (membaca program), maksimum pembacaan 80x8 bit tampilan data. Perintah utama LCD adalah Display Clear, Cursor Home, Display ON/OFF, Display Character Blink, Cursor Shift, dan Display Shift. Tabel 2.2 menunjukkan operasi dasar LCD.
Tabel 2.4 Operasi Dasar LCD
RS R/W Operasi
0 0 Input Instruksi ke LCD
0 1 Membaca Status Flag (DB7) dan alamat counter (DB0 ke DB6)
31 1 1 Membaca Data
Tabel 2.5 Konfigurasi Pin LCD
Pin No. Keterangan Konfigurasi Hubung
1 GND Ground
2 VCC Tegangan +5VDC
3 VEE Ground
4 RS Kendali RS
5 RW Ground
6 E Kendali E/Enable
7 D0 Bit 0
8 D1 Bit 1
9 D2 Bit 2
10 D3 Bit 3
11 D4 Bit 4
12 D5 Bit 5
13 D6 Bit 6
32
15 A Anoda (+5VDC)
16 K Katoda (Ground)
Tabel 2.6 Konfigurasi Pin LCD
Pin Bilangan biner Keterangan
RS 0 Inisialisasi
1 Data
RW 0 Tulis LCD / W (write)
1 Baca LCD / R (read)
E 0 Pintu data terbuka
1 Pintu data tertutup
Lapisan film yang berisis Kristal cair diletakkan di antara dua lempeng kaca yang telah ditanami elektroda logam transparan. Saat teganga dicatukan pada beberapa pasang elektroda, molekul – molekul Kristal cair akan menyusun diri agar cahaya yang mengenainya akan dipantulkan atau diserap. Dari hasil pemantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka, atau gambar sesuai bagian yang di aktifka.
33
digital. Untuk membentuk pola, baik karakter maupun gambar pada kolom dan baris secara bersamaan digunakan metode Screening.
Metode screening adalah mengaktifkan daerah perpotongan suatu kolo dan suatu baris secara bergantian dan cepat sehingga seolah-olah aktif semua. Penggunaan metode ini dimaksudkan untuk menghemat jalur yang digunakan untuk mengaktifkan panel LCD. Kemampuan LCD juga telah ditingkatkan daru yang monokrom hingga yang mampu menampilkan ribuan warna.
2.8 Relay
Pada awalnya sebuah relay di anggap memiliki coil/lilitan tembaga/cooper yang melilit pada sebatang logam, pada saat coil di beri masukan arus/ tegangan listrik/elektrik maka coil akan membuat medan elektromagnetik yang mempengaruhi batang logam di dalam lingkarannya tersebut untuk menjadikannya sebuah magnet. Kekuatan magnet yang terjadi pada batang logam tersebut menarik lempeng logam lain yang terhubung melalui armature/tuas ke sebuah sakelar. Biasanya relay memicu sakelar terbuka dan tertutup, dan hal ini tergantung type dan kebutuhan.
34 2.8.1 Jenis Relay
Untuk memenuhi kebutuhan di dalam merangkai atau membuat sirkuit listrik dan elektronika, beberapa produsen membuat/memproduksi berbagai macam / jenis relay, namun secara sistem relay di bagi atas:
1. Electromagnetic Relays (EMRs)
Electromagnetic Relays (EMRs) terdiri dari kumparan/ coil untuk menerima sinyal tegangan tertentu, dengan satu set atau beberapa kontak yang terhubung pada armature/tuas yang diaktifkan/digerakkan oleh kumparan energi untuk membuka atau menutup sirkuit listrik sebagai hasil dari proses relay tersebut.
2. Solid-state Relays (SSRs)
Solid-state Relays (SSRs) menggunakan output semikonduktor bukan lagi kontak secara mekanik untuk membuka dan menutup sirkuit. Perangkat output optik-digabungkan ke sumber cahaya LED di dalam relay. Relay dihidupkan dengan energi LED ini, biasanya dengan tegangan DC power yang rendah.
Gambar 2.17 Solid-state Relays (SSRs)
3. Microprocessor Based Relays
Mengunakan mikroprosesor untuk mekanisme switching. Umum digunakan dalam pemantauan sistem proteksi power/ daya.
35 Electromagnetic Relays (EMRs)
1. Sederhana dan mudah di pahami 2. Tidak mahal
3. Mudah diperbaiki secara teknik Solid-state Relays (SSRs)
1. Tidak ada gerakan mekanis
2. Secara proses lebih cepat dari EMR
3. Tidak memicu antara kontak, sebagai kontak mandiri
Microprocessor-based Relay
1. Presisi yang jauh lebih tinggi dan lebih handal dan serta tahanlama. 2. Meningkatkan keandalan dan kualitas daya sistem tenaga listrik sebelum,
selama dan setelah kesalahan terjadi.
36 BAB III
PERANCANGAN DAN PEMBUATAN
3.1. Diagram Blok Rangkaian
37 3.1.1 Fungsi Tiap Blok
1. Blok Atmega8535 : Mengkonversi data dari sensor dan modul GSM Wavecom
2. Blok Sensor getar : Sebagai Input / sensor untuk mengetahui adanya getaran akibat di motor
3. Blok LCD : Sebagai output tampilan
4. Blok power supply : Sebagai penyedia tegangan ke system dan Sensor
5. Blok relay : Sebagai saklar untuk mematikan motor otomatis
6. Blok Buzzer : Sebagai Output Alarm (suara)
7. Blok Modul-GSM : Sebagai pengirim dan penerima instruksi melalui SMS
3.2 Rangkaian penstabil tegangan( Regulator)
Rangkaian ini berfungsi untuk memberikan supply tegangan ke seluruh rangkaian yang ada. Keluaran rangkaian Regulator ini yaitu 5 volt, keluaran 5 volt.
Gambar 3.2 Rangkaian regulator
38
5 volt (LM7805) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan.
3.3 Rangkaian Mikrokontroller ATMega8535
Rangkaian sistem minimum mikrokontroler ATMEGA8535 dapat dilihat pada gambar 3.2 di bawah ini :
Gambar 3.3 Rangkaian sistem minimum mikrokontroler ATMEGA8535
39
Pin 12 dan 13 dihubungkan ke XTAL 14.138 MHz dan dua buah kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
Untuk men-download file heksadesimal ke mikrokontroler, Mosi, Miso, Sck, Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke RJ45. RJ45 sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer inilah dihubungkan ke komputer melalui port paralel.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
3.4 Perancangan Rangkaian LCD (Liquid Crystal Display)
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16 x 2. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter. Pemasangan potensio sebesar 10 KΩ untuk mengatur kontras
40
Gambar 3.4. Rangkaian LCD
Dari gambar 3.4, rangkaian ini terhubung ke PB.0 - PB.6, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroller ATMega32.
3.5 Rangkaian Wavecom fastrack
Rangkaian antar muka ini bertujuan agar mikrokontroler dapat berkomunikasi dengan modem GSM.
41 3.6 Rangkaian sensor getar
Sensor ini akan menghasilkan keluaran logika HIGH pada saat mendeteksi vibrasi / getaran.
Gambar 3.6. Rangkaian Sensor getar
Pendeteksi getaran yang di gunakan tipe SW-420 yang berekasi terhadap getaran dari berbagai sudut. Pada kondisi statis / tanpa getaran, komponen elektronika ini berfungsi seperti saklar yang berada pada kondisi menutup (normally closed) dan bersifat konduktif, sebaliknya pada kondisi terguncang (terpapar getaran) saklar akan membuka / menutup dengan kecepatan pengalihan (switching frequency) proporsional dengan kekerapan guncangan. Sensor Ini dapat dioperasikan pada rentang catu daya VCC antara 3,3 Volt hingga 5 Volt.
3.7 Rangkaian Serial Max232
42
Komunikasi serial digunakan agar sistem minimum mikrokontroler dapat berkomunikasi dengan modem GSM untuk mengirim SMS. Tegangan yang digunakan pada komunikasi serial berada pada level tegangan 0V sampai 5V, sedangkan tegangan yang digunakan untuk berkomunikasi dengan modem GSM menggunakan level tegangan RS-232. Agar sistem minimum dapat berkomunikasi dengan modem GSM maka digunakan IC MAX232 sebagai pengubah level tegangan.
Pada RS-232, tegangan negatif merepresentasikan bit 1 dan tegangan positif merepresentasikan bit 0. Mikrokontroler mempunyai level TTL logika rendah sampai dengan 1.8V dan TTL logika tinggi 2.2V sampai dengan 5V, sedangkan pada RS-232 memiliki logika rendah 3V sampai dengan 15V dan untuk logika tinggi -15V sampai dengan -3V. Komunikasi RS232 yang digunakan berupa komunikasi asinkron dengan baud rate 19200 bps, 8 bit data, tanpa paritas dan start bit 1.
Dalam pembuatan rangkaian, IC MAX232 memerlukan beberapa kapasitor. Sesuai dengan datasheet, kapasitor yang digunakan adalah kapasitor 1uF/16 V. Ada 4 kapasitor yang digunakan dalam rangkaian ini yaitu, pada pena 1(+) dengan pena 3(-), pena 4(+) dengan pena 5(-), seperti yang terlihat pada
43 3.8 FLOWCHART SYSTEM
44 BAB IV
HASIL DAN PEMBAHASAN
4.1 Pengujian Rangkaian Regulator
Pengujian rangkaian regulator ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari output regulator 7805 menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak.
Gambar 4.1. Gambar tegangan output ic regulator 7805
4.2 Pengujian Rangkaian Mikrokontroler ATMega8535
45
Gambar 4.2. Informasi Signature Mikrokontroler
ATMega menggunakan kristal dengan frekuensi 8 MHz, apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat, bisa dikatakan rangkaian mikrokontroler bekerja dengan baik dengan mode ISP-nya.
4.3 Interfacing LCD 2x16
46
dituliskan pada layar LCD. Ketika RW berlogika high ”1”, maka program akan melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin RW selalu diberi logika low ( 0 )
47 lcd_putsf("tes LCD");
} }
Program di atas akan menampilkan kata “Tes LCD” di baris pertama pada display LCD 2x16. Pada alat dalam penelitian ini, Saat keseluruhan rangkaian diaktifkan, maka pada LCD akan menampilkan status sensor dan emberitahuan apabila menerima sms .
Gambar 4.3. Pengujian LCD
4.4 Pengujian koneksi modul GSM Wavecom dengan Mikrokontroller
ATMEGA8535 via serial max232
48
komunikasi serial ini kita harus memperhatikan perhitungan clock generator pada mikro, karena cristal yang harus dipergunakan harus menggunakan perhitungan. Hal ini diperlukan agar data yang masuk bener-bener bisa dibaca oleh komputer. Dalam pengujian ini menggunakan crystal 14.138000 MHz.
Mikrokontroller dikomunikasikan secara serial dengan wavecom fastrack M1306b selanjutnya akan mengirimkan SMS di HP user. Dalam Pengkabelanya kondisi RX wavecom dihubungkan dengan TX mikrokontroller begitu pula sebaliknya.
49 }
sms_init(); while (1) {
printf("AT+CMGF=1"); //menyeting modem GSM ke mode text putchar(13); //mengirim 1 karakter CR / enter. printf("AT+CMGS="); //perintah untuk mengirim sms putchar('"'); //mengirim karakter ‘ ” ’ printf("+6285261065610"); //no HP yg dituju putchar('"');
putchar(13); //kode ascii untuk enter<CR> printf("tes modul wavecom"); //isi sms
putchar(26); //kode ascii untuk CTRL-Z }
}
50
Gambar 4.5. SMS terkirim ke handphone
4.5 Pengujian Rangkaian Sensor Getar
Modul sensor ini akan menghasilkan keluaran Digital yaitu logika HIGH dan LOW, pada saat mendeteksi vibrasi / getaran Sensor Ini akan mengeluarkan Logika HIGH. Pada Pengujian Sensor ini, akan di tampilkan ke LCD dan juga sms, Ketika sensor mendeteksi adanya getaran, maka akan tampil di LCD, “getar”, kemudian mengirim sms dan juga menghidupkan buzer.
Berikut program yang akan di download ke mikrokontroler #include <mega32a.h>
#include <alcd.h> #define gatar PINC.1 void main(void) {
52 SFIOR=0x00;
ADCSRA=0x00; SPCR=0x00; TWCR=0x00; lcd_init(16); while (1) {
// Place your code here if (getar == 0);
{lcd_gotoxy(0,0);
lcd_putsf("tdak ada getar"); }
if (getar == 1); {lcd_gotoxy(0,0); lcd_putsf("ada getar"); }
} }
53 BAB V
PENUTUP
5.1 KESIMPULAN
Setelah melakukan tahap perancangan dan pembuatan sistem yang kemudian dilanjutkan dengan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut :
1. Pada prinsipnya, SMS Gateway adalah sebuah perangkat lunak yang menggunakan bantuan komputer dan memanfaatkan teknologi seluler yang diintegrasikan guna mendistribusikan pesan-pesan yang di generate lewat sistem informasi melalui media SMS yang di handle oleh jaringan seluler . SMS Gateway ini memanfaatkan modem untuk server pengiriman SMS. SMS memanfaatkan jaringan operator seluler untuk pengiriman sms,yang dikirim kepada pemilik kendaraan apabila terjadi getaran.
2. Sensor getar merupakan salah satu sensor yang dapat mengukur getaran suatu benda yang nantinya dimana data tersebut akan diproses untuk kepentingan percobaan ataupun di gunakan untuk mengantisipasi sebuah kemungkinan adanya mara bahaya. Pada saat sensor getar mendeteksi adanya getaran, maka sensor akan member sinyal ke mikrokontroler. 3. Didalam sebuah IC mikrokontroler sudah terdapat kebutuhan minimal agar
54 5.2 SARAN
Memandang dari segi penggunaan dan sistem kerja suatu peralatan, maka penulis mempunyai beberapa saran untuk pengembangan alat yang di buat apabila ada pihak yang berminat mengembangkan alat ini secara luar antara lain.
1. Untuk kedepannya alat ini dapat dikembangkan lagi agar dapat mendeteksi getaran dengan sensitifitas yang besar.
55
DAFTAR PUSTAKA
Bejo, A. 2008. C dan AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller ATMega8535, Edisi I. Yogyakarta : Graha Ilmu
Catur Edi Widodo & Retna Prasetia. 2004. Teori dan Praktek Interfacing Port Serial Komputer dengan VisualBasic 6.0. Yogyakarta: Andi.
Daryanto, Drs. 2008. Pengetahuan Teknik Elektronika. Jakarta : Bumi aksara Setiawan,Afrie.2006. 20 aplikasi mikrokontroller ATMEGA8535 & ATMEGA 16 menggunakan BASCOM -AVR . Yogyakarta: ANDI Eko Putra, Agfianto. 2002. Teknik Antarmuka Komputer Konsep dan Aplikasi.
Yogyakarta: Graha Ilmu
Putra eko afgianto.2002.Teknik Antar Muka Komputer: Konsep dan Aplikasi Yogyakarta: Graha ilmu.
Wardana, Lingga. 2006. Belajar Sendiri Mikrokontroller AVR seri ATmega 8535 simulasi, hardware, dan aplikasi. Penerbit Andi. Yogyakarta.
http://e-rid.blogspot.com/2012/03/sistem-keamanan-sepeda-motor.html
Di akses Pada tanggal 9 Maret 2015
http:///IC-Regulator-7805-Be-A-Good-Muslim-Engineer.html
Di akses pada tanggal 9 Maret 2015
http://www.vcc2gnd.com/2014/06/hdx-2-analog-vibration-sensor.html
LAMPIRAN
PROGRAM DAN RANGKAIAN LENGKAP
SISTEM PENGAMANAN SEPEDA MOTOR
/*******************************************************
This program was created by the
CodeWizardAVR V3.12 Advanced
Automatic Program Generator
© Copyright 1998-2014 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 03/18/2015
Author :
Company :
Comments:
Chip type : ATmega8535
Program type : Application
AVR Core Clock frequency: 11.059200 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 128
*******************************************************/
#include <mega8535.h>
#define motor PORTA.0
#define sentuh PINC.0
#define buzzer PORTD.7
#include <delay.h>
#define state1 PIND.4
#define state2 PIND.3
int x,snt,gtr;
char state=0,state_sentuh=0,state_getar=0,dat;
// Alphanumeric LCD functions
#include <alcd.h>
// Declare your global variables here
#define DATA_REGISTER_EMPTY (1<<UDRE)
#define RX_COMPLETE (1<<RXC)
#define FRAMING_ERROR (1<<FE)
#define PARITY_ERROR (1<<UPE)
#define DATA_OVERRUN (1<<DOR)
// USART Receiver buffer
#define RX_BUFFER_SIZE 8
char rx_buffer[RX_BUFFER_SIZE];
#if RX_BUFFER_SIZE <= 256
unsigned char rx_wr_index=0,rx_rd_index=0;
#else
unsigned int rx_wr_index=0,rx_rd_index=0;
#if RX_BUFFER_SIZE < 256
unsigned char rx_counter=0;
#else
unsigned int rx_counter=0;
#endif
// This flag is set on USART Receiver buffer overflow
bit rx_buffer_overflow;
// USART Receiver interrupt service routine
interrupt [USART_RXC] void usart_rx_isr(void)
{
char status,data;
status=UCSRA;
data=UDR;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0)
{
rx_buffer[rx_wr_index++]=data;
#if RX_BUFFER_SIZE == 256
// special case for receiver buffer size=256
if (++rx_counter == 0) rx_buffer_overflow=1;
#else
if (rx_wr_index == RX_BUFFER_SIZE) rx_wr_index=0;
if (++rx_counter == RX_BUFFER_SIZE)
{
rx_buffer_overflow=1;
// Get a character from the USART Receiver buffer
#define _ALTERNATE_GETCHAR_
if (rx_rd_index == RX_BUFFER_SIZE) rx_rd_index=0;
#define TX_BUFFER_SIZE 8
char tx_buffer[TX_BUFFER_SIZE];
#if TX_BUFFER_SIZE <= 256
unsigned char tx_wr_index=0,tx_rd_index=0;
#else
unsigned int tx_wr_index=0,tx_rd_index=0;
#endif
#if TX_BUFFER_SIZE < 256
unsigned char tx_counter=0;
#else
unsigned int tx_counter=0;
#endif
// USART Transmitter interrupt service routine
interrupt [USART_TXC] void usart_tx_isr(void)
{
if (tx_counter)
{
--tx_counter;
UDR=tx_buffer[tx_rd_index++];
#if TX_BUFFER_SIZE != 256
if (tx_rd_index == TX_BUFFER_SIZE) tx_rd_index=0;
#endif
}
#ifndef _DEBUG_TERMINAL_IO_
// Write a character to the USART Transmitter buffer
#define _ALTERNATE_PUTCHAR_
#pragma used+
void putchar(char c)
{
while (tx_counter == TX_BUFFER_SIZE);
#asm("cli")
if (tx_counter || ((UCSRA & DATA_REGISTER_EMPTY)==0))
{
tx_buffer[tx_wr_index++]=c;
#if TX_BUFFER_SIZE != 256
if (tx_wr_index == TX_BUFFER_SIZE) tx_wr_index=0;
#endif
++tx_counter;
}
else
UDR=c;
#asm("sei")
}
#pragma used-
#endif
// Standard Input/Output functions
char receive_sms()
{
char data;
printf("AT+CMGR=1");
putchar(0x0D);
while(getchar()!=0x0A){};
while(getchar()!=0x0A){};
data=getchar();
while(getchar()!='K'){};
while(getchar()!=0x0A){};
delay_ms(500);
printf("AT+CMGD=1");
putchar(0x0D);//ENTER
while(getchar()!='K'){};
while(getchar()!=0x0A){};
delay_ms(500);
printf("AT+CMGD=2");
putchar(0x0D);//ENTER
while(getchar()!='K'){};
while(getchar()!=0x0A){};
delay_ms(500);
printf("AT+CMGD=3");
while(getchar()!='K'){};
while(getchar()!=0x0A){};
delay_ms(500);
return(data);
}
void cek_sms()
{
while(getchar()!=','){};
while(getchar()!=0x0A){};
}
void tampil_lcd(char x,char y,char flash *teks, int tunda)
{
lcd_gotoxy(x,y);
lcd_putsf(teks);
delay_ms(tunda);
}
void sms_init()
{
printf("ATE0");
putchar(0x0D);//ENTER
while(getchar()!='K'){};
delay_ms(500);
}
void send_sms_txt(char flash *fmtstr1, char flash *fmtstr2)
{
printf("AT+CMGF=1");
putchar(0x0D);//ENTER
while(getchar()!=0x0A){};
while(getchar()!=0x0A){};
delay_ms(500);
printf("AT+CMGS=\"");
printf(fmtstr1);
printf("\"");
putchar(0x0D);//ENTER
while(getchar()!=0x20){};
delay_ms(500);
printf(fmtstr2);
putchar(0x1A);
while(getchar()!=0x0A){};
while(getchar()!=0x0A){};
while(getchar()!=0x0A){};
while(getchar()!=0x0A){};
delay_ms(500);
putchar(0x0D);//ENTER
while(getchar()!=0x0A){};
while(getchar()!=0x0A){};
delay_ms(500);
printf("AT+CMGD=2");
putchar(0x0D);//ENTER
while(getchar()!=0x0A){};
while(getchar()!=0x0A){};
delay_ms(500);
printf("AT+CMGD=3");
putchar(0x0D);//ENTER
while(getchar()!=0x0A){};
while(getchar()!=0x0A){};
delay_ms(500);
}
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3) | (0<<DDA2) | (0<<DDA1) | (1<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=0
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (0<<PORTA0);
// Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (0<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (1<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=Out Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRD=(1<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) | (0<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (1<<PORTD4) | (1<<PORTD3) | (1<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=0xFF
// OC0 output: Disconnected
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (0<<CS02) | (0<<CS01) | (0<<CS00);
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer1 Stopped
// Mode: Normal top=0xFFFF
// OC1A output: Disconnected
// OC1B output: Disconnected
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) |
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0<<AS2;
TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21) | (0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00;
OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<OCIE0) | (0<<TOIE0);
// External Interrupt(s) initialization
// INT1: Off
// INT2: Off
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00);
MCUCSR=(0<<ISC2);
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Receiver: On
// USART Transmitter: On
// USART Mode: Asynchronous
// USART Baud Rate: 9600
UCSRA=(0<<RXC) | (0<<TXC) | (0<<UDRE) | (0<<FE) | (0<<DOR) | (0<<UPE) | (0<<U2X) | (0<<MPCM);
UCSRB=(1<<RXCIE) | (1<<TXCIE) | (0<<UDRIE) | (1<<RXEN) | (1<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
UCSRC=(1<<URSEL) | (0<<UMSEL) | (0<<UPM1) | (0<<UPM0) | (0<<USBS) | (1<<UCSZ1) | (1<<UCSZ0) | (0<<UCPOL);
UBRRH=0x00;
UBRRL=0x47;
// Analog Comparator initialization
// Analog Comparator: Off
// The Analog Comparator's positive input is
// connected to the AIN0 pin
// The Analog Comparator's negative input is
// connected to the AIN1 pin
SFIOR=(0<<ACME);
// ADC initialization
// ADC disabled
ADCSRA=(0<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) | (0<<ADIE) | (0<<ADPS2) | (0<<ADPS1) | (0<<ADPS0);
// SPI initialization
// SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
// TWI initialization
// TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE);
// Alphanumeric LCD initialization
// Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu:
// RS - PORTB Bit 0
// RD - PORTB Bit 1
// EN - PORTB Bit 2
// D4 - PORTB Bit 3
// D5 - PORTB Bit 4
// D6 - PORTB Bit 5
// D7 - PORTB Bit 6
lcd_init(16);
// Global enable interrupts
#asm("sei")
lcd_clear();
lcd_gotoxy(0,0);
lcd_putsf("pengaman");
lcd_gotoxy(0,1);
lcd_putsf("sepeda motor");
delay_ms(2000);
lcd_clear();
lcd_gotoxy(0,0);
lcd_putsf("ayub & dani");
delay_ms(1000);
tampil_lcd(0,0,"inisialisasi modul gsm",0);
sms_init();
delay_ms(2000);
lcd_clear();
tampil_lcd(0,0,"inisialisasi oke",1000);
lcd_clear();
tampil_lcd(2,0,"PILIH MODE",1000);
lcd_clear();
tampil_lcd(0,0,"1. Getar",0);
tampil_lcd(0,1,"2. Sentuh",1000);
{
if (state1==0)
{
lcd_clear();tampil_lcd(0,0,"Mode Getar Di Pilih",0);
state_sentuh=0;
state_getar=1;
state=1;
delay_ms(2000);
}
if (state2==0)
{
lcd_clear();tampil_lcd(0,0,"Mode Sentuh Di Pilih",0);
state_sentuh=1;
state_getar=0;
state=1;
delay_ms(2000);
}
}
while (1)
{
// Place your code here
awal:
while(state_getar==1)
send_sms_txt( "085261065610" ,"Segera cek Motor anda, ada yang ingin membobol motor anda, hidupkan alarm dan kunci motor?");
tampil_lcd(0,1,"Sms Terkirim",0);
cek:
lcd_clear( );
tampil_lcd(0,1,"menunggu respon",0);
cek_sms();
lcd_clear();tampil_lcd(0,0,"sms masuk,cek..",100);
dat=receive_sms();
if (dat=='y')
{motor=1;
lcd_clear();