I. Pendahuluan: Relevansi dengan Objektif Pendidikan
Skripsi ini, "Rancangan Alat Pengaman Sepeda Motor Sistem Ganda Berbasis Mikrokontroler Menggunakan Bluetooth Linvor EGBT-046S," memberikan sumbangan berharga kepada pendidikan tinggi, khususnya dalam bidang kejuruteraan dan teknologi. Ia memenuhi beberapa objektif pendidikan penting, termasuk mempraktikkan pengetahuan teori dan konsep kejuruteraan elektrik dan elektronik dalam konteks penyelesaian masalah dunia nyata. Penelitian ini juga melatih kemahiran pelajar dalam reka bentuk, pembinaan, dan pengujian prototaip, serta mengembangkan kemahiran penulisan ilmiah dan penyampaian hasil penyelidikan. Projek ini sesuai dengan matakuliah seperti Reka Bentuk Sistem Terbenam, Elektronik Kuasa, dan Sistem Kawalan, dan menyokong objektif pembelajaran berkaitan dengan penguasaan mikrokontroler, reka bentuk litar, pemrograman terbenam, dan penggunaan sensor.
1.1 Latar Belakang dan Rumusan Masalah
Latar belakang skripsi ini menekankan isu keselamatan dan kecurian kenderaan bermotor, isu yang relevan dengan kehidupan seharian. Rumusan masalah yang dikemukakan secara jelas menggariskan cabaran reka bentuk dan tujuan projek, iaitu untuk membina sistem pengaman dua hala yang efektif dan bergantung kepada mikrokontroler. Ini memperkenalkan pelajar kepada proses penyelidikan yang sistematik, bermula dari mengenal pasti masalah hingga membentuk penyelesaian yang munasabah. Ia juga mengasah kemahiran menganalisis masalah dan mencari penyelesaian kreatif.
1.2 Batasan Masalah, Tujuan, dan Manfaat Penyelidikan
Batasan masalah yang didefinisikan dengan tepat memastikan skop projek yang boleh dicapai. Ini mengajar pelajar tentang pengurusan masa dan sumber dalam projek penyelidikan. Tujuan penyelidikan yang spesifik membantu pelajar untuk menumpukan usaha dan mencapai hasil yang berjaya. Manfaat penyelidikan, iaitu penerapan mikrokontroler dalam keselamatan kenderaan dan sumbangan kepada pengetahuan teknologi, menekankan nilai praktikal dan akademik projek ini. Ia menunjukkan impak positif projek terhadap masyarakat dan bidang teknologi.
1.3 Sistematika Penulisan
Sistematika penulisan yang jelas dan tersusun memberikan gambaran menyeluruh tentang struktur dan kandungan skripsi. Ini membantu pelajar memahami penyampaian maklumat secara teratur dan logik, kemahiran penting dalam penulisan ilmiah. Susunan bab yang sistematik ini juga membantu pelajar untuk mengatur pemikiran dan menyampaikan maklumat dengan berkesan, menjadi asas kepada penulisan laporan teknikal dan ilmiah yang berkualiti.
II. Tinjauan Pustaka: Pengukuhan Teori dan Prinsip
Bab ini menyediakan asas teori yang kukuh untuk projek ini. Ia merangkumi penerangan terperinci tentang mikrokontroler ATMega8535, termasuk arsitektur, ciri-ciri, dan konfigurasi pin. Penerangan tentang sistem elektro-pneumatik, pelbagai jenis sensor (sensor halangan dan sensor tegangan), dan teknologi Bluetooth menunjukkan pemahaman menyeluruh terhadap prinsip-prinsip kejuruteraan yang relevan. Kandungan ini memberikan rangka kerja teoritikal yang kukuh untuk reka bentuk dan pelaksanaan alat pengaman tersebut. Penggabungan teori-teori ini menonjolkan pendekatan interdisipliner dalam projek kejuruteraan.
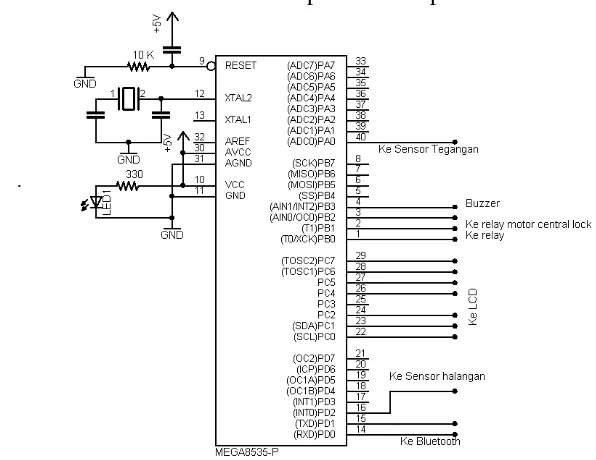
2.1 Mikrokontroler ATMega8535
Perbincangan menyeluruh tentang mikrokontroler ATMega8535, termasuk arsitektur RISC, peranti input/output, dan unit pemprosesan, memberikan asas kukuh untuk memahami fungsi teras sistem. Ini membolehkan pelajar memahami prinsip operasi mikrokontroler dan bagaimana ia digunakan dalam pengawalan sistem terbenam. Penerangan tentang fungsi interrupt dan reset juga menunjukkan pemahaman yang mendalam tentang pengurusan gangguan dalam sistem terbenam.
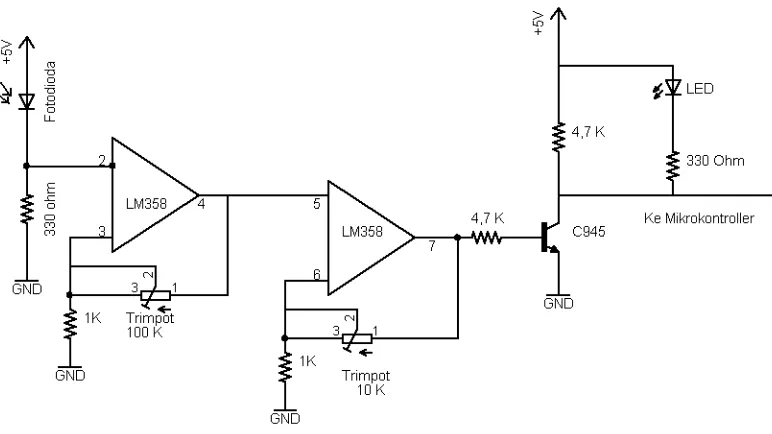
2.2 Elektro-Pneumatik, Sensor, dan Komunikasi Bluetooth
Penerangan tentang sistem elektro-pneumatik yang digunakan untuk mekanisme penguncian roda memperlihatkan integrasi sistem mekanikal dan elektrik. Perbincangan terperinci mengenai pelbagai jenis sensor, khususnya sensor halangan dan sensor tegangan, menunjukkan pemahaman pelajar terhadap pemilihan sensor yang sesuai untuk aplikasi tertentu. Akhir sekali, penerangan tentang teknologi Bluetooth menunjukkan pemahaman tentang komunikasi tanpa wayar dalam sistem terbenam, yang penting dalam reka bentuk alat pengaman ini.
III. Perancangan Alat: Aplikasi Teori dan Prinsip
Bab ini mendemonstrasikan aplikasi teori dan prinsip yang dibincangkan dalam bab sebelumnya. Ia menunjukkan kemahiran pelajar dalam reka bentuk sistem, pemilihan komponen, dan penyepaduan pelbagai modul. Diagram blok sistem, skema litar, dan flowchart menunjukkan proses reka bentuk yang sistematik dan teratur. Ini juga menunjukkan keupayaan pelajar untuk menterjemahkan konsep teori kepada reka bentuk praktikal.
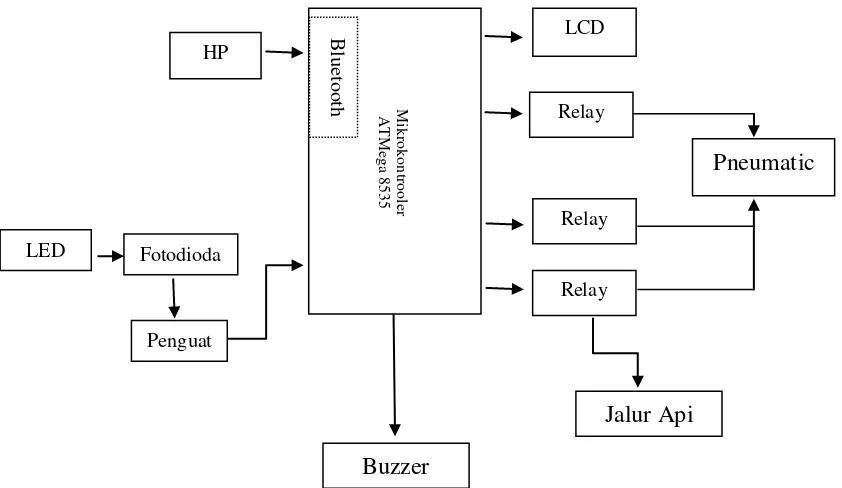
3.1 Diagram Blok Sistem
Diagram blok sistem memberikan gambaran keseluruhan tentang operasi alat pengaman. Ini menunjukkan keupayaan pelajar untuk menggambarkan sistem kompleks dengan cara yang mudah difahami. Ia juga membantu dalam pengurusan projek dan mengenal pasti komponen utama sistem.
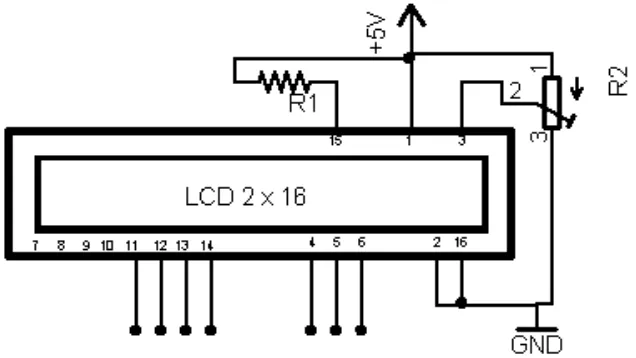
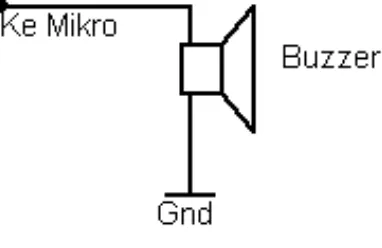
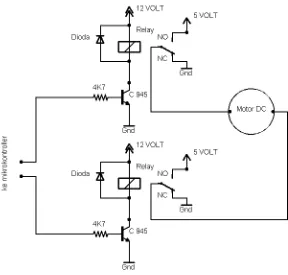
3.2-3.10 Rangkaian Power Supply, Mikrokontroler, LCD, Sensor, Relay, Buzzer, dan Driver Motor DC
Penerangan terperinci tentang setiap rangkaian menunjukkan kemahiran pelajar dalam analisis litar dan reka bentuk litar elektronik. Ia juga menunjukkan pemahaman pelajar tentang fungsi setiap komponen dan bagaimana ia menyumbang kepada fungsi keseluruhan sistem. Ini penting untuk memahami prinsip operasi sistem dan penyelesaian masalah.
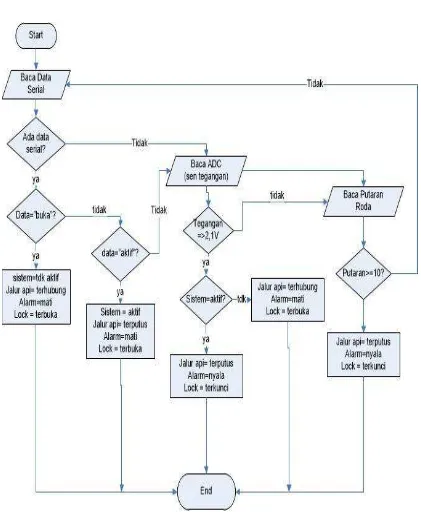
3.11 Flowchart
Flowchart menunjukkan algoritma dan logik kawalan sistem. Ini membantu dalam memahami urutan operasi sistem dan memudahkan pengekodan program mikrokontroler. Ia juga menunjukkan kemahiran pelajar dalam perancangan dan pelaksanaan logik kawalan.
IV. Pengujian Alat: Penilaian dan Analisis Prestasi
Bab ini menerangkan proses pengujian dan analisis prestasi alat pengaman yang dibina. Data pengujian dan analisis menunjukkan keupayaan pelajar untuk menilai keberkesanan reka bentuk mereka. Ia juga mendedahkan kemahiran pelajar dalam pengumpulan data, analisis data, dan tafsiran keputusan. Ketepatan dan kebolehpercayaan alat pengaman dinilai melalui eksperimen dan analisis data.
4.1 Pengujian Sistem Minimum
Pengujian sistem minimum untuk setiap komponen (mikrokontroler, LCD, sensor, pengunci roda, dan Bluetooth) membolehkan mengenal pasti dan menyelesaikan sebarang masalah pada peringkat awal. Ia juga menunjukkan pendekatan penyelesaian masalah yang sistematik dan kemampuan untuk menguji secara terperinci setiap komponen.
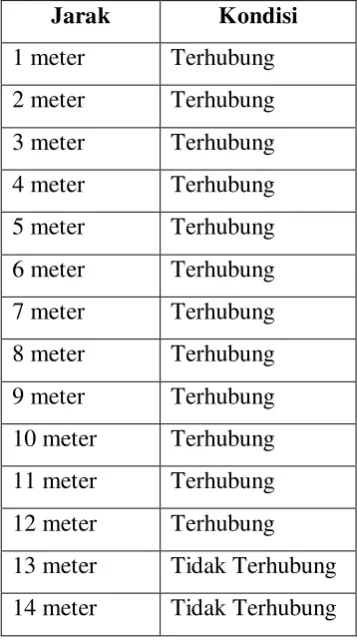
4.2 Analisis Pengujian
Analisis keputusan pengujian menunjukkan keupayaan pelajar untuk mentafsir data dan menilai prestasi alat pengaman. Ia menunjukkan ketepatan dan kebolehpercayaan alat pengaman, serta kemampuan pelajar untuk menilai prestasi dan mengenal pasti potensi penambahbaikan.
V. Kesimpulan dan Saran: Refleksi dan Cadangan Penambahbaikan
Bab ini merumuskan penemuan dan kesimpulan daripada projek ini. Ia juga memberikan cadangan untuk penambahbaikan masa hadapan, menunjukkan keupayaan pelajar untuk merenung semula kerja mereka dan mengenal pasti potensi penambahbaikan. Ini mencerminkan proses pembelajaran yang berterusan dan menunjukkan kesediaan untuk mengembangkan projek ini lebih lanjut.
5.1 Kesimpulan
Kesimpulan merangkum pencapaian projek, menunjukkan kejayaan dalam mencapai objektif penyelidikan. Ia juga menilai keberkesanan alat pengaman yang direka dan menggariskan sumbangan kepada bidang keselamatan kenderaan.
5.2 Saran
Saran memberikan cadangan untuk penambahbaikan masa hadapan, termasuk penambahbaikan reka bentuk, ketepatan, dan ciri-ciri alat pengaman. Ini menunjukkan kemampuan pelajar untuk mengenal pasti potensi penambahbaikan dan mencadangkan penyelesaian untuk meningkatkan prestasi alat pengaman.