4
BAB 2
TINJAUAN PUSTAKA
2.1
Sensor Posisi (limit switch)
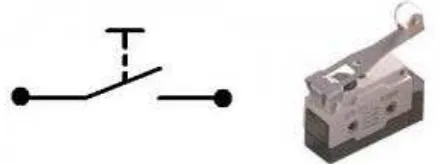
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar Push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas penekanan tertentu yang telah ditentukan dan akan memutus saat katup tidak ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor yang akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu benda (objek) yang bergerak. Simbol limit switch ditunjukan pada gambar berikut:
Gambar 2.1 . Simbol dan bentuk limit switch
Limit switch umumnya digunakan untuk : Memutuskan dan menghubungkan rangkaian menggunakan objek atau benda lain. Menghidupkan daya yang besar, dengan sarana yang kecil. Sebagai sensor posisi atau kondisi suatu objek.
Prinsip kerja limit switch diaktifkan dengan penekanan pada tombolnya pada batas/daerah yang telah ditentukan sebelumnya sehingga terjadi pemutusan atau penghubungan rangkaian dari rangkaian tersebut. Limit switch memiliki 2 kontak yaitu NO (Normally Open) dan kontak NC (Normally Close) dimana salah satu kontak akan aktif jika tombolnya tertekan.
Konstruksi dan simbol limit switch dapat dilihat seperti gambar di bawah:
5
2.2
Motor DC
Motor DC merupakan sebuah perangkat elektromagnetis yang mengubah
energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk,
misalnya, memutar impeller pompa, fan atau blower, menggerakan kompresor,
mengangkat bahan, dll. Motor listrik digunakan juga di rumah seperti: mixer, bor
listrik,fan,angin.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak
mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan
mengatur:
• Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan
kecepatan
• Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak
langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus
dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk
kisaran kecepatan yang luas.
Gambar 2.3 Bentuk Fisik Motor DC
2.2.1 Komponen Utama Motor DC
6 1. KutubMedan
Kutub medan digambarkan sebagai interaksi dua kutub magnet akan
menyebabkan perputaran pada motor DC. Motor DC memiliki kutub
medan yang stasioner dan dinamo yang menggerakan bearing pada ruang
diantara kutub medan. Motor DC sederhana memiliki dua kutub medan:
kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi
bukaan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih
besar atau lebih komplek terdapat satu atau lebih elektromagnet.
Elektromagnet menerima listrik dari sumber daya dari luar sebagai
penyedia struktur medan.
2. Dinamo
Bila arus masuk menuju dinamo, maka arus ini akan menjadi
elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke as
penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil,
dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub,
sampai kutub utara dan selatan magnet berganti lokasi. Jika hal ini terjadi,
arusnya berbalik untuk merubah kutub-kutub utara dan selatan dinamo.
3. Komutator
Komutator terdapat terutama dalam motor DC. Kegunaannya adalah untuk
membalikan arah arus listrik dalam dinamo. Commutator juga membantu
dalam transmisi arus antara dinamo dan sumber daya. Selain itu komutator
berfungsi untuk menyearahkan tegangan yang dihasilkan rotor menjadi
tegangan DC.
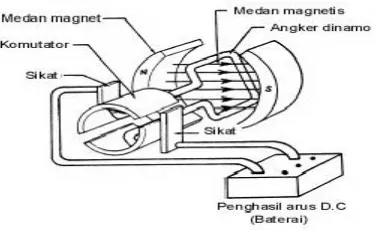
2.2.2 Prinsip Kerja Motor DC
7
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Bagian utama motor DC adalah statos dan rotor dimana kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan. Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor.
2.3
Buzzer
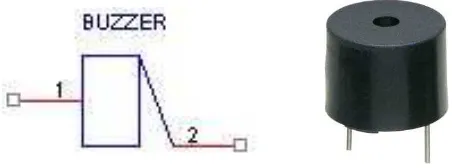
pengingat pesan dan tanda pastinya sudah sering ditemukan di beberapa perangkat elektronik di pasar. Pada era teknologi modern ini, pastinya alarm sudah tersedia di beberapa perangkat elektronik seperti ponsel dan juga jam memiliki alarm sebagai tanda peringatan. Rangkaian alarm atau tanda pengingat ini sudah menjadi salah satu penunjang penting dan tidak dapat dipisahkan di beberapa perangkat elektronik tersebut.
Gambar 2.6 Simbol dan Bentuk Fisik buzzer
8
komponen R4 LDR memiliki fungsi untuk mendeteksi atau melakukan penginderaan cahaya yang berada di sekitar ruangan di dekat rangkaian tersebut. Manfaat utama komponen LDR ini adalah cara menerima cahaya yang masuk. Apabila cahaya terang, tingkat resistensi dari LDR ini akan rendah dan tidak membuat rangkaian tersebut mengalirkan arus ke arah buzzer atau speaker yang terdapat di dalam rangkaian tersebut.
Hal kebalikannya justru terjadi jika LDR menerima cahaya rendah atau gelap sama sekali. Hasilnya, tingkat resistansi menjadi lebih tinggi sehingga bisa menimbulkan aliran ke arah komponen buzzer. Bersamaan dengan keadaan tingkat resistansi yang tinggi, nantinya komponen IC akan terpicu dan mendorong buzzer untuk menghasilkan suara yang nyaring dan mendeteksi adanya gangguan. Rangkaian ini juga bisa menggunakan cahaya sebagai alat pengaktifannya jika relay dan juga transistor terhubung dengan pin 3 atau output dari IC 1.
2.4
Mikrokontroller ATMega 8
2.4.1 Arsitektur Mikrokontroller ATMega 8
AVR merupakan salah satu jenis mikrokontroler yang di dalamnya terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada umumnya digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan oscillator eksternal karena di dalamnya sudah terdapat internal oscillator. Selain itu kelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada tombol reset dari luar karena cukup hanya dengan mematikan supply, maka secara otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat beberapa fungsi khusus seperti ADC, EEPROM sekitar 128 byte sampai dengan 512 byte.
9
tegangan antara 2,7 - 5,5 V sedangkan untuk ATmega8 hanya dapat bekerja pada tegangan antara 4,5 – 5,5 V.
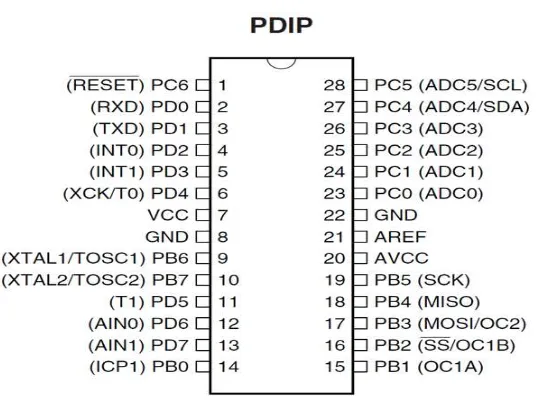
2.4.2 Konfigurasi Pin ATMega 8
Gambar 2.7 Konfigurasi Pin ATMega 8
ATmega8 memiliki 28 Pin, yang masing-masing pin nya memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akan dijelaskan fungsi dari masing-masing kaki ATmega8.
a. VCC
Merupakan supply tegangan digital. b. GND
Merupakan ground untuk semua komponen yang membutuhkan grounding. c. Port B (PB7...PB0)
10
clock. Jika sumber clock yang dipilih dari oscillator internal, PB7 dan PB6 dapat digunakan sebagai I/O atau jika menggunakan Asyncronous Timer/Counter 2 maka PB6 dan PB7 (TOSC 2 dan TOSC 1) digunakan untuk saluran input timer.
d. Port C (PC5…PC0)
Port C merupakan sebuah 7-bit bi-directional I/O port yang di dalam masing-masing pin terdapat pull-up resistor. Jumlah pin nya hanya 7 buah mulai dari pin C.0 sampai dengan pin C.6. Sebagai keluaran/output port C memiliki karakteristik yang sama dalam hal menyerap arus (sink) ataupun mengeluarkan arus (source).
e. RESET/PC6
Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pinI/O. Pin ini memiliki karakteristik yang berbeda dengan pin-pinyang terdapat pada port C lainnya. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek dari pulsa 8 minimum, maka akan menghasilkan suatu kondisi reset meskipun clock-nya tidak bekerja.
f. Port D (PD7…PD0)
Port D merupakan 8-bit bi-directionalI/O dengan internal pull-upresistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada portini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
g. AVcc
Pin ini berfungsi sebagai supply tegangan untuk ADC. Untuk pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ADC pada AVR tidak digunakan tetap saja disarankan untuk menghubungkannya secara terpisah dengan VCC. Jika ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui low pass filter.
h. AREF
11
Gambar 2. 8 Bentuk Fisik ATmega8
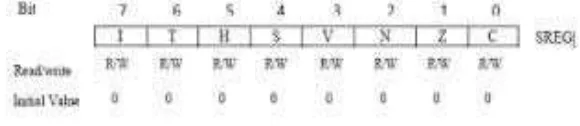
Pada AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic Logic Unit) hal tersebut seperti yang tertulis dalam data sheet khususnya pada bagian Instruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang penggunaan kebutuhan instruksi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software. Berikut adalah gambar status register.
Gambar 2.9 Status Register ATMega 8 • Bit 7(I)
12
abaikan. Bit ini akan dibersihkan atau clear oleh hardware setelah sebuah interupsi di jalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat diset dan di-reset melalui aplikasi dan intruksi SEI dan CLL.
• Bit 6(T)
Merupakan bit Copy Storage. Instruksi bit Copy Instructions BLD (Bit Load) and BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dalam Register File dapat disalin ke dalam bit ini dengan menggunakan instruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam bit di dalam register pada Register File dengan menggunakan perintah BLD.
• Bit 5(H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD. • Bit 4(S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah ekslusif di antara Negative Flag(N) dan two’s Complement Overflow Flag (V).
• Bit 3(V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
• Bit 2(N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negative di dalam sebuah fungsi logika atai aritmatika.
• Bit 1(Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah jasil nol “0” dalam sebuah fungsi aritmatika atau logika.
• Bit 0(C)
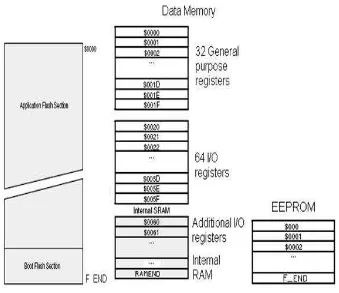
13 2.4.3 Memori AVR ATMega
Gambar 2.10 Peta Memori Atmega 8
Memori atmega terbagi menjadi tiga yaitu : 1. Memori Flash
Memori flash adalah memori ROM tempat kode-kode program berada. Kata flash menunjukan jenis ROM yang dapat ditulis dan dihapus secara elektrik. Memori flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian aplikasi adalah bagian kode-kode program apikasi berada. Bagian boot adalah bagian yang digunakan khusus untuk booting awal yang dapat diprogram untuk menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui USART.
2. Memori Data
14
32 GPR (General Purphose Register) adalah register khusus yang bertugas untuk membantu eksekusi program oleh ALU (Arithmatich Logic Unit), dalam instruksi assembler setiap instruksi harus melibatkan GPR. Dalam bahasa C biasanya digunakan untuk variabel global atau nilai balik fungsi dan nilainilai yang dapat memperingan kerja ALU. Dalam istilah processor komputer sahari-hari GPR dikenal sebagai “chace memory”.
I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheral dalam mikrokontroler seperti pin port, timer/counter, usart dan lain-lain. Register ini dalam keluarga mikrokontrol MCS51 dikenal sebagai SFR(Special Function Register).
3. EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip mati (off), digunakan untuk keperluan penyimpanan data yang tahan terhadap gangguan catu daya.
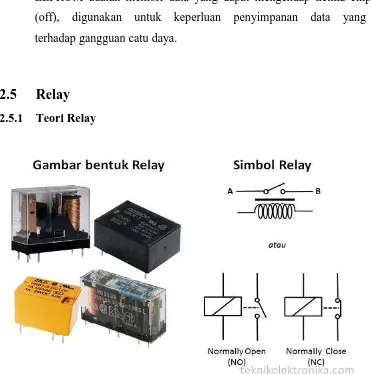
2.5
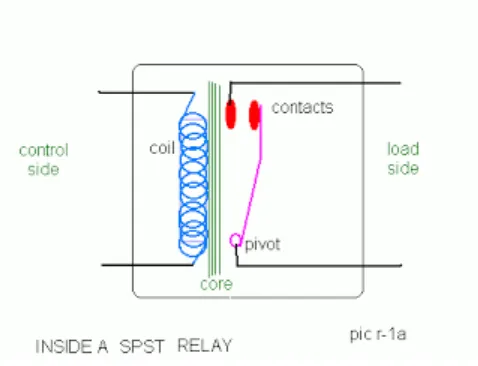
Relay
2.5.1 Teori Relay15
Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
• Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
• Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
Karena Relay merupakan salah satu jenis dari Saklar, maka istilah Pole dan Throw yang dipakai dalam Saklar juga berlaku pada Relay. Berikut ini adalah penjelasan singkat mengenai Istilah Pole and Throw :
• Pole : Banyaknya Kontak (Contact) yang dimiliki oleh sebuah relay
• Throw : Banyaknya kondisi yang dimiliki oleh sebuah Kontak (Contact)
2.5.2 Prinsip Kerja Relay
Gambar 2.12 Prinsip Kerja Relay
16
listrik 4 ampere AC 220 V) dengan memakai arus/tegangan yang kecil (misalnya 0.1 ampere 12 Volt DC). Relay yang paling sederhana ialah relay elektromekanis yang memberikan pergerakan mekanis saat mendapatkan energi listrik.
Secara sederhana relay elektromekanis ini didefinisikan sebagai berikut :
• Alat yang menggunakan gaya elektromagnetik untuk menutup (atau membuka) kontak saklar.
• Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik.
Dalam pemakaiannya biasanya relay yang digerakkan dengan arus DC dilengkapi dengan sebuah dioda yang di-paralel dengan lilitannya dan dipasang terbaik yaitu anoda pada tegangan (-) dan katoda pada tegangan (+). Ini bertujuan untuk mengantisipasi sentakan listrik yang terjadi pada saat relay berganti posisi dari on ke off agar tidak merusak komponen di sekitarnya.
2.6
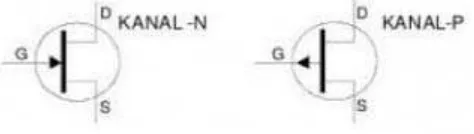
Field Effect Transistor (FET)
Gambar 2.13 Simbol FET
Field Effect Transistor (FET) merupakan suatu jenis transistor khusus. Tidak seperti transistor biasa, yang akan menghantar bila diberi arus basis, transistor jenis ini akan menghantar bila diberikan tegangan (jadi bukan arus). Kaki-kakinya diberi nama Gate (G), Drain (D) dan Source (S).
Jenis FET ada dua yaitu Kanal N dan Kanal P.
Kanal n dibuat dari bahan semikonduktor tipe n dan kanal p dibuat dari semikonduktor tipe p. Ujung atas dinamakan Drain dan ujung bawah dinamakan Source. Pada kedua sisi kiri dan kanan terdapat implant semikonduktor yang berbeda tipe. Terminal kedua sisi implant ini terhubung satu dengan lainnya secara internal dan dinamakan Gate.
17
berkenaan dengan lapisan deplesi (depletion layer). Lapisan ini terbentuk antara semikonduktor tipe n dan tipe p, karena bergabungnya elektron dan hole di sekitar daerah perbatasan. Sama seperti medan listrik, lapisan deplesi ini bisa membesar atau mengecil tergantung dari tegangan antara gate dengan source.
Beberapa Kelebihan FET dibandingkan dengan transistor biasa ialah antara lain penguatannya yang besar, serta desah yang rendah. Karena harga FET yang lebih tinggi dari transistor, maka hanya digunakan pada bagian-bagian yang memang memerlukan. Ujud fisik FET ada berbagai macam yang mirip dengan transistor. Seperti halnya dengan transistor, ada dua jenis FET yaitu Kanal N dan Kanal P. Kecuali itu terdapat beberapa macam FET ialah Junktion FET (JFET) dan Metal Oxide Semiconductor FET (MOSFET).
MOSFET yang digunakan dalam rangkaian alat ini adalah Mosfet IRF Z44 Kanal P dengan bentuk fisik sebagai berikut: