PERANCANGAN DAN PENGUJIAN KARAKTERISTIK
TRANSMITTER
DAN
RECEIVER
LASER HIJAU SEBAGAI
MODUL SAKLAR CAHAYA
GERRY ANDRYANA KRISNAHADI
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Perancangan dan Pengujian Karakteristik Transmitter dan Receiver Laser Hijau sebagai Modul Saklar Cahaya adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
GERRY ANDRYANA KRISNAHADI. Perancangan dan Pengujian Karakteristik Transmitter dan Receiver Laser Hijau sebagai Modul Saklar Cahaya. Dibimbing oleh RADITE PRAEKO AGUS SETIAWAN.
Posisi suatu alat dan mesin pertanian (alsintan) di lahan dapat ditentukan dengan menggunakan Real Time Differential GPS yang memiliki akurasi hingga tingkat senti meter. Namun sistem ini memiliki beberapa kelemahan dan memerlukan biaya yang mahal. Sistem penentu lokasi lokal menggunakan transmitter laser dan receiver sensor cahaya serta prinsip triangulasi dikembangkan untuk menentukan lokasi alsintan di lahan sebagai pengganti penggunaan GPS. Penelitian ini difokuskan pada perancangan dan pengujian karakteristik transmitter dan receiver laser hijau sebagai modul saklar cahaya. Metode yang digunakan terdiri dari perancangan osilator, perancangan driver pengedip laser hijau, perancangan rangkaian sensor penerima, perancangan modul receiver, dan pengujian. Hasil pengujian menunjukkan bahwa osilator transmitter terbaik dikedipkan pada 2700 Hz dan duty cycle 50%, jarak transmitter-receiver mampu mencapai 200 m, jarak optimal antar fotodioda 5 cm, dan sensor dapat bekerja dengan baik pada berbagai kondisi lingkungan cahaya. Sistem transmitter bersumber laser hijau dan sensor fotodioda sebagai modul saklar cahaya untuk alat penentu lokasi alsintan di lahan telah dikembangkan dan berfungsi dengan baik.
Kata kunci: alsintan, fotodioda, laser hijau, sistem penentu lokasi local
ABSTRACT
GERRY ANDRYANA KRISNAHADI. Designing and Testing Green Laser Transmitter and Receiver Characteristics as Light Switch Module. Supervised by RADITE PRAEKO AGUS SETIAWAN.
Position of an agricultural machinery in the field can be determined by using Real Time Differential GPS which has an accuracy up to centimeter level. However this system has some weaknesses and costly. Local positioning system uses a laser transmitter and light sensor receiver as well as the principle of triangulation was developed to determine the location of agricultural machine on the field instead of using GPS. This research was focused on design and test of green laser transmitter and receiver characteristics as light switch module. The method used consists of designing oscillator, designing green laser flicker driver, designing receiver sensor circuit, designing receiver module, and testing. The test results showed that the best transmitter oscillator was flickered at 2700 Hz on duty cycle of 50%, the transmitter-receiver distance capable of reaching 200 m, the optimal distance between the photodiodes is 5 cm, and the sensor can work well in various lighting environment conditions. The transmitter based on green laser and photodiode sensor system as light switch module for agricultural machinery local positioning system at the field device has been developed and functioned well.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
Departemen Teknik Mesin dan Biosistem
PERANCANGAN DAN PENGUJIAN KARAKTERISTIK
TRANSMITTER
DAN
RECEIVER
LASER HIJAU SEBAGAI
MODUL SAKLAR CAHAYA
GERRY ANDRYANA KRISNAHADI
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
Judul Skripsi : Perancangan dan Pengujian Karakteristik Transmitter dan Receiver Laser Hijau sebagai Modul Saklar Cahaya
Nama : Gerry Andryana Krisnahadi NIM : F14110064
Disetujui oleh
Dr Ir Radite Praeko Agus Setiawan, MAgr Pembimbing Skripsi
Diketahui oleh
Dr Ir Desrial, MEng Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan April 2015 ini ialah instrumentasi, dengan judul Perancangan dan Pengujian Karakteristik Transmitter dan Receiver Laser Hijau sebagai Modul Saklar Cahaya.
Ungkapan terima kasih penulis sampaikan kepada ibu, papah, serta seluruh keluarga, atas segala doa dan kasih sayangnya. Terima kasih penulis ucapkan kepada Bapak Dr Ir Radite Praeko Agus Setiawan selaku pembimbing, serta Bapak Dr Slamet Widodo dan Bapak Dr Ir I Dewa Made Subrata yang telah banyak memberi saran. Di samping itu, penghargaan penulis sampaikan kepada Muhammad Ikhwan Hanif, Muhammad Fajar Nur Iman, Abi Rafdi Aziz, Frida Suciningsih Mettypratama, Akhmad Fauzi, dan Gian Virgiawan, yang telah membantu selama pengumpulan data.
Semoga karya ilmiah ini bermanfaat.
DAFTAR ISI
Parameter yang Diukur 15
HASIL DAN PEMBAHASAN 15
DAFTAR TABEL
1 M
asukan dan keluaran IC 4049 dan IC 7430 13
2 H
asil pegujian siang 18
3 H
asil pengujian sore 20
4 H
asil pengujian malam 21
DAFTAR GAMBAR
1 R
angkaian PWM Controller IC 555 dan rumus perhitungannya 4
2 (
a) Duty cycle 50% (b) Duty cycle 95% (c) Duty cycle 5% 5
3 (
a) Fotodioda (b) Kurva tanggapan frekuensi sensor fotodioda 5
4 (
a) Rangkaian active HPF (b) Respon frekuensi active HPF 6
5 (
a) Non inverting amplifier (b) Skema dasar komparator 7
6 R
angkaian Transmitter laser hijau 11
7 R
angkaian sensor penerima 11
8 B
entuk koneksi IC LM 4049 dan IC LM 7430 12
9 D
iagram blok transmitter-receiver laser hijau 13
10 M
odul receiver tampak depan (a) dan tampak belakang (b) 13
11 D
iagram blok tahapan penelitian 14
12 T
ransmitter laser hijau 16
13 (
a) Modul receiver pengujian (b) Fotodioda terkena cahaya laser 16
14 T
ransmitter-receiver laser hijau 17
15 G
rafik pengaruh jarak terhadap tegangan pengujian siang 18
16 G
17 ( a) Pengujian siang (b) Tudung untuk melindungi fotodioda 19
18 G
rafik pengaruh jarak terhadap tegangan pengujian sore 20
19 G
rafik pengaruh jarak terhadap frekuensi pengujian sore 20
20 (
a) Persiapan transmitter (b) Pengukuran jarak transmitter-receiver 21
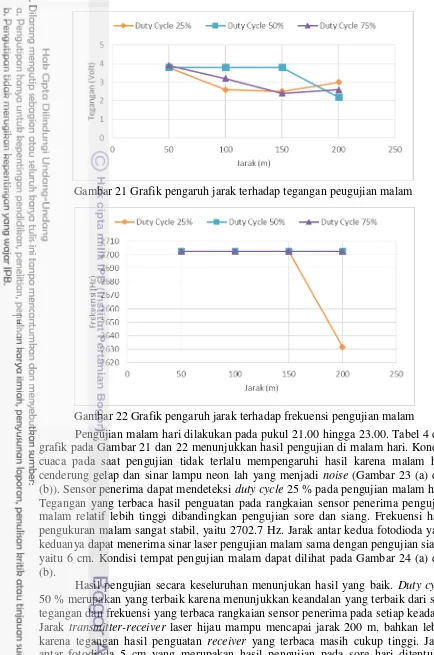
21 G
rafik pengaruh jarak terhadap tegangan pengujian malam 22
22 G
rafik pengaruh jarak terhadap frekuensi pengujian malam 22
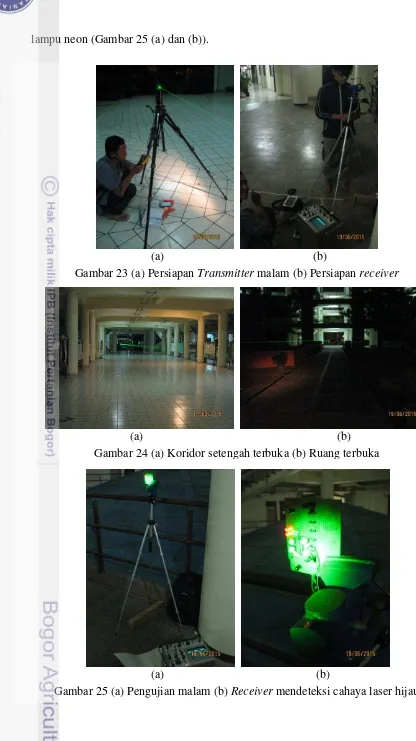
23 (
a) Persiapan Transmitter malam (b) Persiapan receiver 23
24 (
a) Koridor setengah terbuka (b) Ruang terbuka 23
25 (
a) Pengujian malam (b) Receiver mendeteksi cahaya laser hijau 23
DAFTAR LAMPIRAN
1 S
pesifikasi, bentuk, dan lambang transistor 26
2 J
adwal pelaksanaan kegiatan penelitian 27
3 R
incian biaya penelitian 28
4 G
ambar gelombang transmitter 29
5 G
ambar gelombang receiver 30
PENDAHULUAN
Latar Belakang
2
Sistem pemosisian lokal dapat digunakan sebagai alternatif untuk mengatasi kekurangan-kekurangan dari GPS. Bac et al. (2010) mengatakan bahwa beberapa sistem penentu lokasi lokal yang telah dikembangkan pada robot di lingkungan indor diantaranya tersedia secara komersial menggunakan range finders optikal (Sohn dan Kim, 2008), ultrasonografi (Wehden et al., 2006), serta metode lain yang didasarkan pada pengukuran kekuatan sinyal dari transmitter yang ditargetkan pada jarak jauh namun memiliki akurasi terbatas (Elnahrawy et al., 2004). Selain itu, terdapat pula penentu lokasi robot yang bergerak menggunakan odometri dan sensor vision eksternal, yaitu kamera (Pizarro at al. 2010), sehingga membutuhkan biaya yang cukup mahal.
Sistem navigasi seperti yang dikembangkan oleh Bac et al. (2010) dapat menjadi salah satu alternatif. Sistem pemandu lokasi tersebut terdiri dari transmitter laser yang berputar dan menembakkan cahayanya ke empat receiver yang terdiri dari sensor-sensor cahaya yang dipancangkan di ujung meja untuk mengukur sudut antara transmitter dan beberapa receiver untuk menghasilkan koordinat berdasarkan prinsip triangulasi. Sistem pemandu lokasi menggunakan laser tersebut diadopsi dan dikembangkan pada penelitian terpadu untuk menentukan lokasi alsintan di lahan sebagai pengganti penggunaan GPS.
Aplikasi dari sistem navigasi yang dikembangkan adalah sebagai pemandu operasi alsintan seperti Traktor Pintar (Desrial et al. 2010) di lapangan. Sistem sensor tersebut terdiri dari transmitter bersumber laser yang berputar konstan sambil menembakkan cahaya di bidang datar ke receiver sensor-sensor cahaya yang ditempatkan di 4 tiang ujung lahan. Receiver berfungsi sebagai saklar cahaya yang
menerima tembakkan laser. Sinyal “penerimaan” selanjutnya dikirimkan ke
pemroses data menggunakan wireless untuk digunakan mengukur besarnya sudut yang dihasilkan antara 2 receiver dan transmitter berdasarkan waktu dan kecepatan sudut dari transmitter dengan menggunakan algoritma lokasi. Pengukuran ini dilakukan terus menerus secara otomatis sehingga diperoleh koordinat transmitter (x, y) tersebut yang selanjutnya akan dijadikan dasar untuk memandu pergerakan suatu alsintan menggunakan mikro kontroler.
Sumber sinyal transmitter yang digunakan dapat berupa gelombang mekanik seperti suara atau ultrasonik dan gelombang elektromagnetik seperti cahaya atau radio. Kecepatan suara atau ultrasonik, yaitu 344 m/s, terlalu rendah untuk digunakan dalam transmisi sinyal pada sistem ini. Kecepatan cahaya atau radio, 300.000 km/s, terlalu tinggi jika digunakan dalam transmisi sistem ini. Oleh karena itu, digunakan sistem saklar cahaya untuk transmisi sinyal sistem ini. Saklar cahaya adalah suatu saklar yang akan mengalirkan arus listrik saat menerima sinyal masukan berupa cahaya tertentu. Cahaya yang digunakan adalah cahaya laser hijau yang dipasang pada transmitter. Penelitian pada skripsi ini difokuskan pada perancangan dan pengujian karakteristik transmitter dan receiver laser hijau sebagai modul saklar cahaya yang merupakan salah satu topik penelitian dalam penelitian terpadu pengembangan alat pemandu lokasi alsintan di lahan.
3
Rumusan Masalah
Pengembangan sistem pemandu lokasi lokal alsintan yang akan dibuat dalam penelitian terpadu membutuhkan transmitter dan receiver yang cocok untuk digunakan di lahan. Transmitter dan receiver berbasis laser hijau akan digunakan sebagai modul saklar cahaya dalam penelitian ini. Transmitter laser yang digunakan harus mampu memancarkan sinyal dan receiver yang digunakan harus mampu menerimanya dengan baik serta menghindari gangguan yang ada. Penelitian ini dilakukan untuk merancang dan menguji karakteristik transmitter-receiver laser hijau sebagai modul saklar cahaya yang sesuai dengan kebutuhan itu.
Tujuan Penelitian
Tujuan penelitian ini adalah merancang dan menguji karakteristik transmitter dan receiver berbasis laser hijau sebagai modul saklar cahaya dalam pengembangan alat penentu lokasi lokal alsintan di lahan.
Manfaat Penelitian
Hasil dari penelitian ini diharapkan dapat memberikan manfaat sebagai berikut:
1. Berkontribusi dalam pengembangan teknologi pemandu lokasi alsintan di lahan.
2. Memperbaiki hasil penelitian yang pernah dilakukan sebelumnya.
3. Sebagai referensi bagi penelitian selanjutnya dalam pengembangan teknologi transmitter-receiver laser di lahan.
Ruang Lingkup Penelitian
Penelitian ini dilakukan di laboratorium dan lahan datar sepanjang 200 m untuk melakukan perancangan dan pegujian karateristik transmitter-receiver. Pengujian siang dan sore hari dilakukan di lahan terbuka, sedangkan pengujian malam hari dilakukan di sebuah koridor setengah terbuka yang diterangi lampu neon.
TINJAUAN PUSTAKA
4
OSU EH&S (2015) menyatakan bahwa cahaya yang dihasilkan oleh laser berbeda dengan cahaya biasa dan setidaknya memiliki 3 sifat utama. Sifat dari cahaya laser tersebut adalah monokromatik (hanya terdiri dari satu panjang gelombang spesifik), koheren (semua foton mempunyai gelombang yang sefasa) dan terkolimasi (foto yang dihasilkan oleh laser terfokuskan pada satu titik sehingga tidak menyebar untuk jarak yang jauh).
OSU EH&S (2015) mengatakan “... Ada banyak jenis laser di pasaran yang umum dipakai dalam bidang kesehatan, industry, maupun komersil. Hal yang membedakan dari banyak jenis laser adalah medium penguatan yang digunakan untuk menghasilkan laser ini ...”. Berdasarkan medium penguatnya, laser terdiri dari solid state, gas, excimer, dye, dan semiconductor. Salah satu jenis laser yang banyak digunakan adalah semiconductor. Laser jenis ini juga sering disebut dengan diode laser dan berukuran sangat kecil dan menggunakan daya yang kecil.
Selain berdasarkan mediumnya, laser juga diklasifikasikan berdasarkan potensial kerusakan biologisnya pada manusia (OSU EH&S 2015) sebagai berikut: i. Kelas I
Laser pada level ini tidak mengemisikan radiasi yang berbahaya. ii. Kelas IA
Pada kelas ini laser tidak boleh dilihat langsung. Batas maksimum dayanya adalah 4mW.
iii. Kelas II
Laser ini bisa dilihat mata dan mengemisikan laser dengan daya diatas kelas I. Manusia akan secara otomatis menghindar bila disinari laser ini agar selamat. iv. Kelas IIIA
Laser jenis ini berdaya menengah yani 1-5 mW dan berbahaya jika diarahkan langsung ke mata. Kebanyakan penunjuk laser yang dijual dipasaran merupakan kelas ini.
v. Kelas IIIB
Laser dengan daya menengah. vi. Kelas IV
Laser ini berdaya tinggi (lebih dari 500mW) yang sangat berbahaya bila dilihat langsung atau melalui pantulannya. Laser dengan kelas ini bahkan bisa menimbulkan luka bakar.
Diode laser dipilih untuk digunakan sebagai modul saklar cahaya. Diode laser ini dipilih karena bentuknya yang kecil dan berdaya rendah serta memenuhi spesifikasi modul transmitter yang diinginkan, yaitu berukuran kecil dan tahan lama. Sumber daya laser ini menggunakan batere dan laser yang digunakan berkelas IV dan memiliki panjang gelombang cahaya 532 nm (warna hijau).
Transistor
Kho (2014) mengatakan “... Transistor merupakan komponen elektronika
5 collector (K). Berdasarkan strukturnya, transistor terdiri dari 2 tipe struktur yaitu PNP dan NPN. Uni Junction Transistor (UJT), Field Effect Transistor (FET) dan Metal Oxide SemiconductorFET (MOSFET) juga merupakan keluarga dari transistor. Spesifikasi, bentuk, dan lambang transistor dapat dilihat di Lampiran 1.
PWM Controller IC 555
Timer IC 555 dapat digunakan sebagai rangkaian pengontrol Pulse Width Modulation „PWM controller‟ yang sederhana seperti yang dinyatakan PWM ... (2012). Hal ini karena IC 555 memiliki dasar pengendali PWM dengan fitur pengendalian lebar pulsa 0-100% yang dikendalikan menggunakan suatu potensiometer RP1 pada suatu pembangkit pulsa dengan frekuensi yang stabil, tidak terpengaruh oleh perubahan posisi potensiometer RP1 tersebut. Frekuensi output yang dihasilkan dari rangkaian pengendali PWM di bawah ditentukan oleh nilai resistor R1 dan R2, potensiometer RP1 dan kapasitor C1. Lebar pulsa sisi positif dan sisi negatif dari pulsa output rangkaian PWM controller ini dapat ditentukan dari posisi potensiometer RP1. Frekuensi output rangkaian PWM controller dengan konfigurasiseperti pada Gambar 4 dapat disesuaikan dengan keinginan berdasarkan rumusnya. Gambar 2 memperlihatkan gelombang segi empat yang dihasilkan PWM controller IC 555 dengan duty cycle yang berbeda-beda.
Gambar 1 Rangkaian PWM Controller IC 555 dan rumus perhitungannya a
6
Fotodioda
Sensor ... (2012) menjelaskan bahwa sensor fotodioda merupakan dioda yang peka terhadap cahaya, akan mengalami perubahan resistansi pada saat menerima intensitas cahaya, dan akan mengalirkan arus listrik secara forward sebagaimana dioda pada umumnya. Sensor fotodioda juga merupakan salah satu jenis sensor peka cahaya (fotodetektor) dan akan mengalirkan arus yang membentuk fungsi linear terhadap intensitas cahaya yang diterima.
Fotodioda (Gambar 3 (a)) yang digunakan dalam penelitian ini berwarna hitam (berfilter). Tanggapan frekuensi sensor fotodioda tidak luas seperti terlihat pada Gambar 3 (b). Sensor fotodioda memiliki tanggapan paling baik terhadap cahaya infra merah, tepatnya pada cahaya dengan panjang gelombang sekitar 0,9 µm. Panjang gelombang sinar laser hijau (532 nm) juga termasuk dalam rentang tanggapan sensor fotodioda. Fotodioda oleh karena itu digunakan dalam penelitian ini sebagai receiver sensor cahaya laser.
(a) (b)
Gambar 3 (a) Fotodioda (b) Kurva tanggapan frekuensi sensor fotodioda
aSumber: Sensor (2012).
7 Filter Aktif Lolos Atas
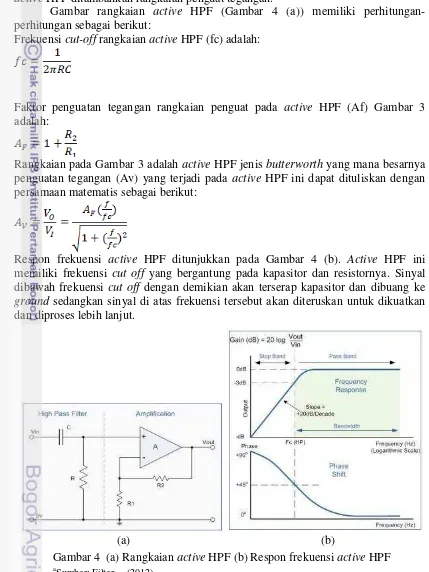
Menurut Filter ... (2012), Filter aktif lolos atas atau active High Pass Filter (active HPF) adalah rangkaian filter yang akan melewatkan sinyal input dengan frekuensi di atas frekuensi cut-off rangkaian dan akan melemahkan sinyal input dengan frekuensi di bawah frekuensi cut-off rangkaian. Pada dasarnya rangkaian active HPF sama saja dengan filter pasif high pass, perbedaannya pada bagian output active HPF ditambahkan rangkaian penguat tegangan.
Gambar rangkaian active HPF (Gambar 4 (a)) memiliki perhitungan-perhitungan sebagai berikut:
Frekuensi cut-off rangkaian active HPF (fc) adalah:
Faktor penguatan tegangan rangkaian penguat pada active HPF (Af) Gambar 3 adalah:
Rangkaian pada Gambar 3 adalah active HPF jenis butterworth yang mana besarnya penguatan tegangan (Av) yang terjadi pada active HPF ini dapat dituliskan dengan persamaan matematis sebagai berikut:
Respon frekuensi active HPF ditunjukkan pada Gambar 4 (b). Active HPF ini memiliki frekuensi cut off yang bergantung pada kapasitor dan resistornya. Sinyal dibawah frekuensi cut off dengan demikian akan terserap kapasitor dan dibuang ke ground sedangkan sinyal di atas frekuensi tersebut akan diteruskan untuk dikuatkan dan diproses lebih lanjut.
(a) (b)
Gambar 4 (a) Rangkaian active HPF (b) Respon frekuensi active HPF
8
Operational Amplifier (Op-Amp)
Operasional ... (2012) menyatakan bahwa operational amplifier (op-amp) adalah suatu penguat berpenguatan tinggi yang terintegrasi dalam sebuah chip IC yang memiliki dua input inverting dan non-inverting dengan sebuah terminal output. Rangkaian umpan balik juga dapat ditambahkan untuk mengendalikan karakteristik tanggapan keseluruhan pada op-amp.
Sebagai penguat operasional ideal, Operasional ... (2012) menyatakan bahwa karakteristik yang dimiliki op-amp sebagai berikut:
i. Impedansi input (Zi) besar = ∞
ii. Impedansi output (Zo) kecil= 0
iii. Penguatan tegangan (Av) tinggi = ∞
iv. Band widthrespon frekuensi lebar = ∞
v. V0 = 0 apabila V1 = V2 dan tidak tergantung pada besarnya V1. vi. Karakteristik op-amp tidak tergantung temperatur/ suhu.
Banyak jenis op-amp yang ada di pasaran, misalnya jenis general purpose, wide-bandwidth, low noise dan high frequency. Penguat sinyal menggunakan op-amp 741 (MC741) biasanya cukup untuk pengaturan. Op-amp 741 merupakan op-amp versi lama yang masih dipakai di laboratorium dan memiliki versi dual dan quad. Jung (2005) menyatakan bahwa penguat LM324 muncul setelah ditemukan teknik penguat yang cocok untuk operasi dalam single supply pada tegangan rendah yang menjadi standar quad op-amp murah untuk penggunaan umum industri. Hal ini diikuti oleh tipe dual, LM358. Penelitian ini menggunakan LM 324 untuk mengetahui berapa besarnya penguatan yang dibutuhkan.
Berdasarkan fungsinya, op-amp dapat digunakan sebagai voltage follower, inverting amplifier, non inverting ampifier, summing amplifier, differential amplifier, instrumentation amplifier, integrator amplifier, differentiator amplifier, comparator, pengubah bentuk gelombang dan pembangkit gelombang (osilator). Op-amp yang pada penelitian ini digunakan sebagai non inverting ampifier dan comparator pada rangkaian sensor penerima.
Noninvertingamplifier seperti yang terlihat pada Gambar 5 (a), rangkaiannya hanya memerlukan dua tahanan yaitu Ri dan Rf. Fasa dari tegangan input akan sama dengan fasa tegangan output. Biasanya non inverting amplifier lebih sering dipakai saat dihubungkan dengan pengatur.
Prinsip kerja op-amp sebagai penanding (comparator) adalah membandingkan tegangan masukan dengan tegangan referensi yang telah ditentukan. Ciri komparator adalah bekerja tanpa umpan balik (Gambar 5 (b)) dengan kondisi
(a) (b)
Gambar 5 (a) Non inverting amplifier (b) Skema dasar komparator
9 pengutan penuh atau penguatan terbuka (open loop gain). Tegangan referensi fungsinya untuk membandingkan tegangan yang satu dengan tegangan yang lainya.
Cathode Ray Oscilloscope (CRO)
Cathode Ray Oscilloscope (CRO) atau osiloskop sinar katoda bermanfaat untuk mengukur besaran-besaran: tegangan, frekuensi, periode, bentuk sinyal dan beda fasa (Cathode ... 2015). Ada berbagai bentuk sinyal listrik, yaitu sinusoida, segitiga „triangle‟, kotak „square‟, denyut „pulse‟. Berbagai bentuk sinyal listrik tersebut dapat dengan mudah diukur tegangannya, periodenya dan dapat ditentukan berapa frekuensinya menggunakan perangkat CRO ini.
Osciloskop sinar katoda ada dua jenis, jenis 1 chanel dan jenis 2 chanel. Dua sinyal secara serempak dalam layar dapat ditampilkan CRO 2 chanel. Spesifikasi umum CRO yang harus diketahui antara lain horisontal axis, vertikal axis, sweep time circuit, trigering, intensity modulation, dan power source. Tujuan dari mengetahui spesifikasi teknis CRO adalah agar kita mengetahui batas maksimum dan minimum kemampuan osiloskop dalam mengukur sinyal, menghindari kesalahan setting up CRO dalam pengukuran, dan menghindari kerusakan (Cathode ... 2015).
Penelitian Terkait Penggunaan Transmitter-Receiver di Lapangan
Desain dan Pengujian Transmiter dan Reciver sebagai Input Mikrokontroler untuk Menggerakaan Hidrolik
Penelitian Hariasyah (2014) dapat dijadikan referensi pada penelitian ini. Penelitiannya diawali dengan pembuatan rangkaian astabil multivibrator menggunakan IC 555 yang digunakan sebagai transmitter dan menambahkan transistor BD 139 sebagai chopper. Frekuensi yang dihasilkan, yaitu 1.2 kHz, ditumpangkan ke sinar laser hijau. Laser hijau kelas IV, type HY 303, daya 1 Watt, tegangan 4 volt, dan arus maksumum 250 mA digunakan dalam penelitiannya. Laser hijau memiliki pancaran sinar hijau dengan jarak pancar lebih dari 1 - 1.5 km. Rangkaian astabil multivibrator dan sinar laser dipasang disisi lapangan, menggunakan tripot. Pancaran sinar laser hijau yang dapat diterima oleh sensor fotodioda mencapai jarak maksimum 50 meter, diatas jarak 50 meter intensitas sinar laser hijau sudah berkurang, hal ini terlihat dari sebaran sinar yang sudah terpencar.
10
METODE
Waktu dan Tempat
Penelitian ini dilaksanakan pada bulan Maret hingga bulan Juli 2015 (Lampiran 2). Perancangan dilakukan di Laboratorium Mekatronika Bagian TMO. Pengujian siang dan sore dilaksanakan di Jalan Agatis (belakang rektorat IPB), sedangkan pengujian malam di koridor yang menghubungkan gedung Fateta dan gedung Faperta.
Alat dan Bahan
Alat dan bahan yang digunakan dalam penelitian ini adalah: 1. Alat dan bahan pembuat rangkaian elektronika
2. Multimeter
3. Osiloskop 20 MHz
4. Senter laser hijau (532 nm) 1,000 mW 5. Fotodioda
6. Tripod 2 buah
7. Power bank 5 V, 1 A 2 buah 8. Kabel rol
9. Meteran rol
10.Alat komunikasi (hand phone) 2 buah Rincian biaya penelitian dapat di lihat di Lampiran 3.
Tahapan Penelitian
Perancangan Osilator
Laser yang digunakan sebagai transmitter ingin dikedipkan dengan frekuensi tetap 3,000 Hz agar dapat dideteksi receiver. Pengkedipan ini dilakukan dengan menggunakan osilator 555 sebagai astable multivibrator sehingga dihasilkan gelombang persegi, seperti yang dapat dilihat pada gambar gelombang transmitter di osiloskop pada Lampiran 4. Bukit dan lembah gelombang ini memperlihatkan bagian on dan off tegangan yang dihasilkan. Tegangan laser akan ditingkatkan pada bukit (bagian on). Peningkatan tegangan ini dilakukan agar cahaya laser lebih terang dan jangkauan semakin jauh, serta membuang gangguan dari cahaya lain.
Peningkatan tegangan yang dilakukan pada frekuensi tinggi dapat menyebabkan laser cepat putus (rusak) dan boros baterai. Hal ini dapat dihindari dengan mengatur lebar bukit dan lembah gelombang. Lebar bukit dapat dibuat pendek sehingga waktu tegangan tinggi cepat dan lebar lembah panjang sehingga waktu tegangan off lama. Oleh karena itu dibutuhkan teknik osilator yang dapat menghasilkan lebar pulsa tersebut dengan frekuensi yang tetap, yaitu Pulse Width Modulation (PWM). Frekuensi output rangkaian PWM controller dengan konfigurasi seperti pada Gambar 5 diperoleh sebesar 3,279.6 Hz, duty cycle max 4.6%, dan duty cycle min 95.5% menurut perhitungan berikut:
s Hz
f
11
Perancangan Driver Pengkedip Laser Hijau
Driver pengkedip laser hijau menggunakan transistor sebagai saklar. Tegangan yang terukur pada penyalaan laser hijau tanpa kedipan adalah 3 V dan arus yang terukur adalah 0.3 A. Tegangan yang dinaikkan untuk menghasilkan daya yang besar akan mengalirkan arus yang besar pula. Misalnya tegangan ditingkatkan hingga 12 V, maka arusnya pun akan bertambah hingga sekitar 1.3 A. Oleh karena itu, dibutuhkan pemilihan transistor yang sesuai dengan kepentingan tersebut.
Pemilihan transistor didasarkan pada arus kolektor (IC), hfe, dan frekuensi switch. Arus kolektor maksimal transistor harus dapat menampung arus keluaran dari load. Arus keluaran dari load akan ditingkatkan hingga 1.3 A. Arus base tidak dapat melebihi arus keluaran dari osilator 555, yaitu 30 mA. Frekuensi yang diinginkan sebesar 2,000 Hz. Maka dari itu dipilih transistor yang memiliki IC di atas 1.3 A, hfe yang menghasilkan IB lebih rendah dari 30 mA, dan frekuensi lebih dari 2,000 Hz.
Misalkan transistor yang digunakan adalah BD 139 yang memiliki IC 1.5A, hfe 320, dan frekuensi switch 250 MHz (Lampiran 1). Arus base (IB) dapat dihitung dengan perhitungan berikut:
Dengan demikian, transistor BD139 merupakan transistor yang cocok untuk digunakan sebagai saklar pada rangkaian driver ini.
Transistor ini merupakan transistor silikon bipolar. Transistor silikon memiliki VBE 0.7 volt dan diperlukan resistor basis (RB) berdasarkan rumus di bawah ini. Gambar rangkaian transmitter laser hijau diperlihatkan pada Gambar 6.
12
Perancangan Rangkaian Sensor Penerima
Rangkaian sensor penerima terdiri dari fotodioda, High Pass Filter (HPF) dan penguat op-amp yang tergabung menjadi active HPF, dan komparator (Gambar 7). Fotodioda digunakan sebagai sensor sinar laser. Active HPF digunakan untuk
membuang gangguan „noise’ yang ditimbulkan dari gelombang lain di sekitar sensor
yang memiliki frekuensi lebih rendah dari frekuensi transmitter. Frekuensi transmitter diset 2,000 Hz dan active HPF diset di 1,500 Hz. Berdasarkan rumus frequensi cut off, maka dibutuhkan perkalian RC sebesar 106.1 µΩFarad seperti pada perhitungan di bawah ini. Oleh karena itu digunakan resistor sebesar 10,000 Ω dan kapasitor sebesar 0.01 µFarrad.
Penguat yang digunakan adalah IC LM324 yang memiliki 4 op-amp. Empat op-amp ICLM 324 digunakan sebagai 2 penguat dan 2 komparator sehingga terdapat 2 rangkaian sensor penerima yang menggunakan 1 IC LM 324 yang sama. Penguat yang digunakan merupakan penguat noninverting menggunakan 100 kali penguatan. Komparator yang digunakan diset di 0.5 volt. Perhitungan active HPF yang digunakan seperti di bawah ini menghasikan penguatan tegangan sebesar 84.2 kali. Frekuensi cut off:
Gambar 6 Rangkaian transmitter laser hijau
13
Sehingga
Jika digunakan resistor (R) sebesar 10,000 , maka:
Faktor penguat tegangan:
14
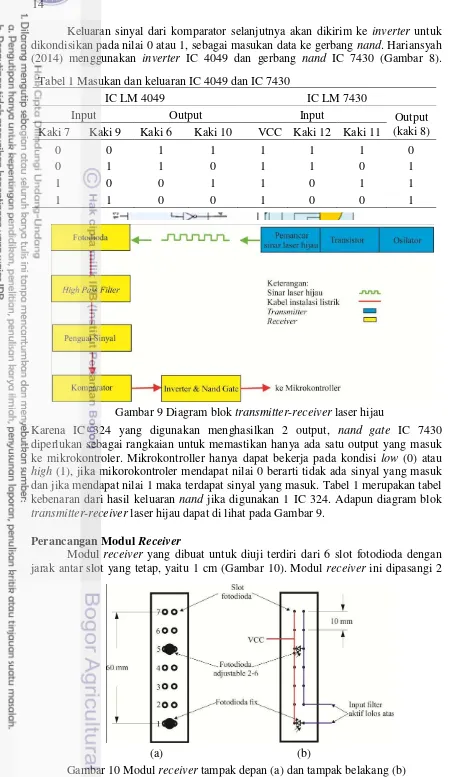
Keluaran sinyal dari komparator selanjutnya akan dikirim ke inverter untuk dikondisikan pada nilai 0 atau 1, sebagai masukan data ke gerbang nand. Hariansyah (2014) menggunakan inverter IC 4049 dan gerbang nand IC 7430 (Gambar 8).
Karena IC 324 yang digunakan menghasilkan 2 output, nand gate IC 7430 diperlukan sebagai rangkaian untuk memastikan hanya ada satu output yang masuk ke mikrokontroler. Mikrokontroller hanya dapat bekerja pada kondisi low (0) atau high (1), jika mikorokontroler mendapat nilai 0 berarti tidak ada sinyal yang masuk dan jika mendapat nilai 1 maka terdapat sinyal yang masuk. Tabel 1merupakan tabel kebenaran dari hasil keluaran nand jika digunakan 1 IC 324. Adapun diagram blok transmitter-receiver laser hijau dapat di lihat pada Gambar 9.
Perancangan Modul Receiver
Modul receiver yang dibuat untuk diuji terdiri dari 6 slot fotodioda dengan jarak antar slot yang tetap, yaitu 1 cm (Gambar 10). Modul receiver ini dipasangi 2
Gambar 8 Bentuk koneksi IC LM 4049 dan IC LM 7430
Gambar 9 Diagram blok transmitter-receiver laser hijau Tabel 1 Masukan dan keluaran IC 4049 dan IC 7430
IC LM 4049 IC LM 7430
Input Output Input Output
(kaki 8) Kaki 7 Kaki 9 Kaki 6 Kaki 10 VCC Kaki 12 Kaki 11
0 0 1 1 1 1 1 0
0 1 1 0 1 1 0 1
1 0 0 1 1 0 1 1
1 1 0 0 1 0 0 1
(a) (b)
15 fotodioda untuk diatur jarak antaranya agar dapat diukur berapa jarak antar fotodioda optimal. Dengan demikian, modul receiver ini memerlukan 2 rangkaian sensor penerima.
Pengujian
Tahap terakhir penelitian ini adalah pengujian seperti terlihat pada Gambar 11. Pengujian dilakukan untuk mengetahui performa sistem transmitter-receiver yang dirancang dan mengetahui berapa nilai optimal parameter-parameter penting yang diukur sehingga dapat digunakan pada alat penentu lokasi lokal alsintan.
Perlakuan
Duty Cycle Pengkedipan Sumber Sinar Laser
Perlakuan ini dilakukan dengan cara mengubah-ubah waktu on dan waktu off gelombang sinar laser. Perubahan perlakuan ini dilakukan dengan memutar trimpot (potensiometer) pada rangkaian osilator PWM laser hijau. Duty cycle yang diuji
16
adalah 25%, 50%, dan 75%. Hal ini dilakukan untuk mengetahui duty cycle mana yang menghasilkan jangkauan maksimal dengan daya optimal.
Jarak Transmitter-Receiver
Jarak transmitter-receiver diuji setiap 50 m hingga lebih dari 100 m. Perlakuan ini dilakukan untuk mengetahui berapa jarak maksimum yang dapat dicapai sensor.
Sumber Cahaya Lain (Cahaya Matahari dan Lampu Neon)
Sumber cahaya lain seperti cahaya mata hari pada siang dan sore hari serta lampu neon pada malam hari dapat menimbulkan noise yang mempengaruhi sistem transmitter-receiver. Sensor diletakkan pada jarak 3 m dari lampu neon. Kondisi ini dibuat untuk melihat pengaruh noise tersebut terhadap sistem.
Parameter yang Diukur
Frekuensi yang Diterima
Frekuensi yang diterima rangkaian sensor penerima dapat dilihat pada saat pengujian menggunakan osiloskop. Frekuensi yang diterima harus tetap pada duty cycletransmitter yang diubah-ubah.
Tegangan yang Diterima
Tegangan yang diterima rangkaian sensor penerima dapat dilihat pada saat pengujian menggunakan osiloskop. Tegangan yang diukur adalah tegangan sinyal setelah melewati penguatan sebelum komparator. Hasil pengukuran parameter ini digunakan untuk melihat apakah penguatan tegangan yang dirancang sudah optimal untuk menguatkan tegangan hingga lebih besar dari tegangan set komparator.
Jarak antar Fotodioda
Jarak antar fotodioda pada receiver juga akan diukur untuk diuji keandalan penggunaannya. Jarak antar fotodioda dicoba pada jarak 1 cm, 2 cm, 3 cm, 4 cm, 5 cm, dan 6 cm. Cahaya laser fokus pada satu titik pada saat dekat dan menyebar menjadi titik dengan diameter yang lebih besar pada saat jauh. Jarak antar fotodioda yang diinginkan yaitu dapat mendeteksi sinar laser pada saat jarak transmitter-receiver dekat dan jauh.
HASIL DAN PEMBAHASAN
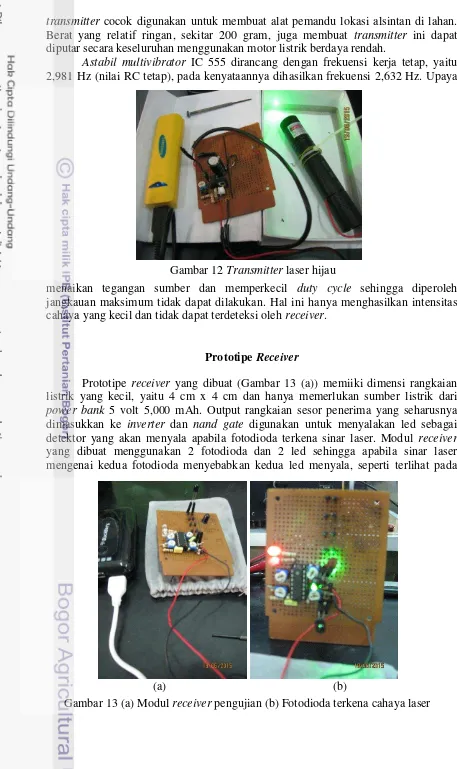
Prototipe Transmitter
17 transmitter cocok digunakan untuk membuat alat pemandu lokasi alsintan di lahan. Berat yang relatif ringan, sekitar 200 gram, juga membuat transmitter ini dapat diputar secara keseluruhan menggunakan motor listrik berdaya rendah.
Astabil multivibrator IC 555 dirancang dengan frekuensi kerja tetap, yaitu 2,981 Hz (nilai RC tetap), pada kenyataannya dihasilkan frekuensi 2,632 Hz. Upaya
menaikan tegangan sumber dan memperkecil duty cycle sehingga diperoleh jangkauan maksimum tidak dapat dilakukan. Hal ini hanya menghasilkan intensitas cahaya yang kecil dan tidak dapat terdeteksi oleh receiver.
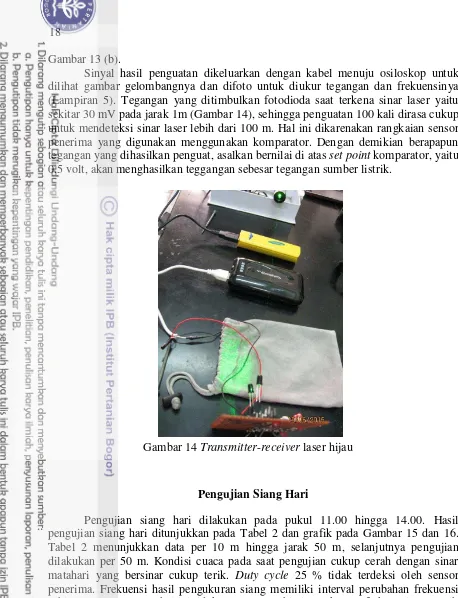
Prototipe Receiver
Prototipe receiver yang dibuat (Gambar 13 (a)) memiiki dimensi rangkaian listrik yang kecil, yaitu 4 cm x 4 cm dan hanya memerlukan sumber listrik dari power bank 5 volt 5,000 mAh. Output rangkaian sesor penerima yang seharusnya dimasukkan ke inverter dan nand gate digunakan untuk menyalakan led sebagai detektor yang akan menyala apabila fotodioda terkena sinar laser. Modul receiver yang dibuat menggunakan 2 fotodioda dan 2 led sehingga apabila sinar laser mengenai kedua fotodioda menyebabkan kedua led menyala, seperti terlihat pada
Gambar 12 Transmitter laser hijau
(a) (b)
18
Gambar 13 (b).
Sinyal hasil penguatan dikeluarkan dengan kabel menuju osiloskop untuk dilihat gambar gelombangnya dan difoto untuk diukur tegangan dan frekuensinya (Lampiran 5). Tegangan yang ditimbulkan fotodioda saat terkena sinar laser yaitu sekitar 30 mV pada jarak 1m (Gambar 14), sehingga penguatan 100 kali dirasa cukup untuk mendeteksi sinar laser lebih dari 100 m. Hal ini dikarenakan rangkaian sensor penerima yang digunakan menggunakan komparator. Dengan demikian berapapun tegangan yang dihasilkan penguat, asalkan bernilai di atas set point komparator, yaitu 0.5 volt, akan menghasilkan teggangan sebesar tegangan sumber listrik.
Pengujian Siang Hari
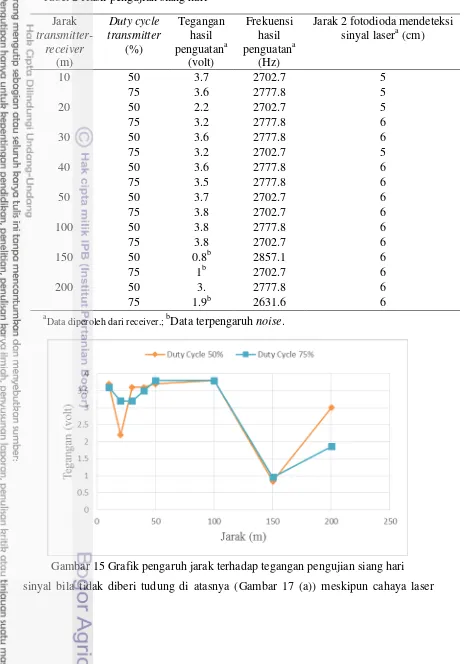
Pengujian siang hari dilakukan pada pukul 11.00 hingga 14.00. Hasil pengujian siang hari ditunjukkan pada Tabel 2 dan grafik pada Gambar 15 dan 16. Tabel 2 menunjukkan data per 10 m hingga jarak 50 m, selanjutnya pengujian dilakukan per 50 m. Kondisi cuaca pada saat pengujian cukup cerah dengan sinar matahari yang bersinar cukup terik. Duty cycle 25 % tidak terdeksi oleh sensor penerima. Frekuensi hasil pengukuran siang memiliki interval perubahan frekuensi sekitar 200 Hz, namun hal ini tidak mempengaruhi sistem karena frekuensinya masih di atas filter aktif lolos atas. Jarak antar kedua fotodioda yang keduanya dapat mendeteksi sinar laser adalah 6 cm.
Hasil yang diperoleh dari pengujian dapat dipengaruhi oleh noise yang ada. Transmitter aser yang digunakan juga dapat dipengaruhi suhu udara yang panas di siang hari sehingga dapat meredup pada waktu-waktu tertentu. Hal ini dapat menyebabkan menurunnya tegangan yang terbaca pada receiver secara drastis pada jarak 150 m pengujian siang. Noise yang ditimbulkan cahaya matahari juga dapat mempengaruhi fotodioda dalam mendeteksi sinyal dari cahaya laser transmitter.
20
Data diperoleh dari receiver.; bData terpengaruh noise.
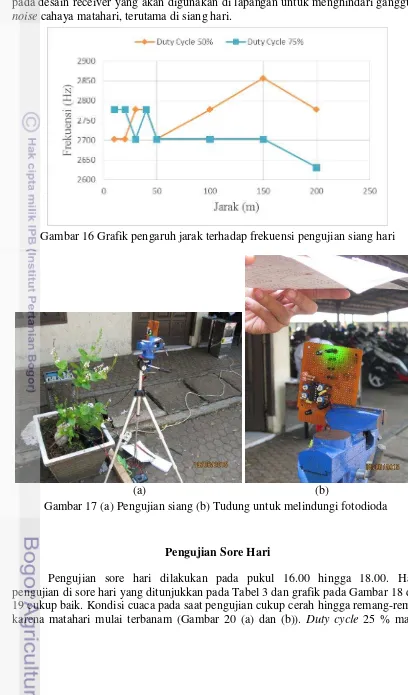
21 sudah mengenainya. Tudung yang digunakan dapat dilihat pada Gambar 17 (b). Hal ini hanya terjadi pada saat pengujian siang. Oleh karena itu, dibutuhkan suatu tudung pada desain receiver yang akan digunakan di lapangan untuk menghindari gangguan noise cahaya matahari, terutama di siang hari.
Pengujian Sore Hari
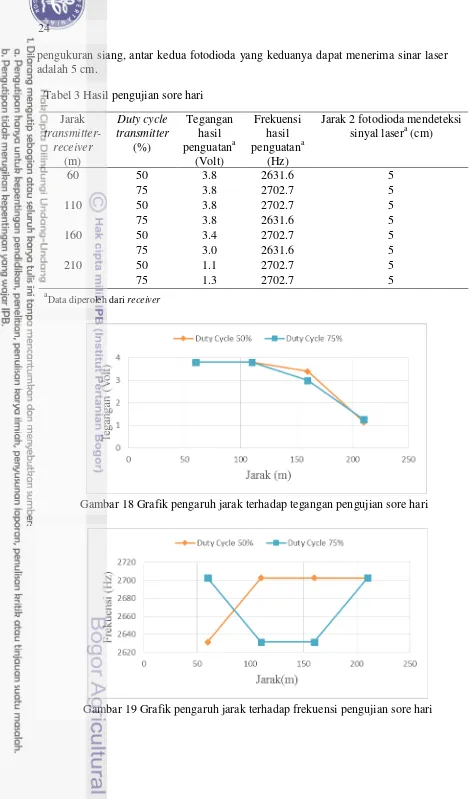
Pengujian sore hari dilakukan pada pukul 16.00 hingga 18.00. Hasil pengujian di sore hari yang ditunjukkan pada Tabel 3 dan grafik pada Gambar 18 dan 19 cukup baik. Kondisi cuaca pada saat pengujian cukup cerah hingga remang-remag karena matahari mulai terbanam (Gambar 20 (a) dan (b)). Duty cycle 25 % masih
Gambar 16 Grafik pengaruh jarak terhadap frekuensi pengujian siang hari
(a) (b)
22
24
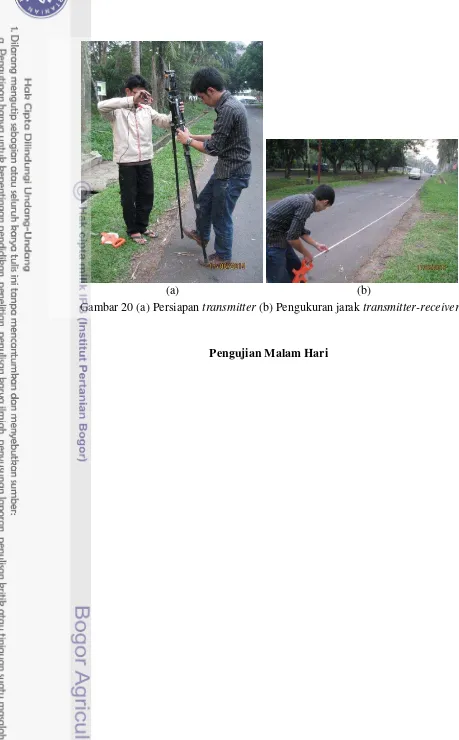
Tabel 3 Hasil pengujian sore hari Jarak
Jarak 2 fotodioda mendeteksi sinyal lasera (cm)
Data diperoleh dari receiver
pengukuran siang, antar kedua fotodioda yang keduanya dapat menerima sinar laser adalah 5 cm.
Gambar 18 Grafik pengaruh jarak terhadap tegangan pengujian sore hari
25
Pengujian Malam Hari
(a) (b)
26
Tabel 4 Hasil pengujian malam Jarak
Data diperoleh dari receiver
Pengujian malam hari dilakukan pada pukul 21.00 hingga 23.00. Tabel 4 dan grafik pada Gambar 21 dan 22 menunjukkan hasil pengujian di malam hari. Kondisi cuaca pada saat pengujian tidak terlalu mempengaruhi hasil karena malam hari cenderung gelap dan sinar lampu neon lah yang menjadi noise (Gambar 23 (a) dan (b)). Sensor penerima dapat mendeteksi duty cycle 25 % pada pengujian malam hari. Tegangan yang terbaca hasil penguatan pada rangkaian sensor penerima pengujian malam relatif lebih tinggi dibandingkan pengujian sore dan siang. Frekuensi hasil pengukuran malam sangat stabil, yaitu 2702.7 Hz. Jarak antar kedua fotodioda yang keduanya dapat menerima sinar laser pengujian malam sama dengan pengujian siang, yaitu 6 cm. Kondisi tempat pengujian malam dapat dilihat pada Gambar 24 (a) dan (b).
Hasil pengujian secara keseluruhan menunjukan hasil yang baik. Duty cycle 50 % merupakan yang terbaik karena menunjukkan keandalan yang terbaik dari segi tegangan dan frekuensi yang terbaca rangkaian sensor penerima pada setiap keadaan. Jarak transmitter-receiver laser hijau mampu mencapai jarak 200 m, bahkan lebih, karena tegangan hasil penguatan receiver yang terbaca masih cukup tinggi. Jarak antar fotodioda 5 cm yang merupakan hasil pengujian pada sore hari ditentukan sebagai jarak optimal karena kondisi cahaya sore hari mirip dengan pagi hari. Hal ini
Gambar 21 Grafik pengaruh jarak terhadap tegangan peugujian malam
28
29 lampu neon (Gambar 25 (a) dan (b)).
(a) (b)
Gambar 23 (a) Persiapan Transmitter malam (b) Persiapan receiver
(a) (b) Gambar 24 (a) Koridor setengah terbuka (b) Ruang terbuka
(a) (b)
30
SIMPULAN DAN SARAN
Simpulan
Sistem transmitter bersumber laser hijau dengan sensor fotodioda sebagai modul saklar cahaya dalam pengembangan alat penentu lokasi lokal alsintan di lahan dapat berfungsi dengan baik. Transmitter laser hijau yang direkomendasikan, menggunakan laser berdaya 1,000 mW, sumber listrik power bank 5 volt 5,000 mAh, dan dikedipkan dengan metode PWM pada frekuensi 2631.6Hz. Receiver laser hijau yang direkomendasikan, menggunakan fotodioda hitam (berfilter) yang memiliki puncak sensitivitas 940 nm, sumber listrik power bank 5 volt 8,400 mAh, filter aktif lolos atas yang di set pada 1,500 Hz dan penguatan 100 kali, komparator yang diset pada 0.5 volt, inverter, dan nand gate. Hasil pengujian menunjukkan duty cycle osilator terbaik adalah 50%, jarak transmitter-receiver mampu mencapai 200 m, jarak antar fotodioda optimal 5 cm, dan sensor dapat digunakan pada berbagai kondisi cahaya.
Saran
Penelitian ini menggunakan bahan-bahan yang tersedia secara umum di pasaran agar mudah dilakukan, sehingga kadang spesifikasi dan kualitasnya tidak sesuai dengan kebutuhan atau tidak seragam. Oleh karena itu saat dilakukan perbanyakan alat ini, sebaiknya digunakan bahan-bahan yang sesuai dengan kebutuhan dan memiliki kualitas yang baik dan seragam. Peggunaan IC pada rangkaian sensor penerima juga masih menggunakan IC op-amp standar, sehingga pada penelitian berikutnya dapat digunakan IC op amp rangkap 4 rendah gangguan
„low noise quad op-amp‟ untuk mengefisienkan penggunaan komponen elektronika dan meningkatkan performa receiver. Pengujian jarak penerimaan sinyal dan jarak antar fotodioda juga dapat diperbaiki untuk mendapatkan hasil yang lebih optimal, seperti menguji hingga 250 m dan menggunakan teropong untuk memudahkan dan mempercepat pengukuran.
DAFTAR PUSTAKA
Bac CW, Grift TE, Menezes G. 2011. Development of a tabletop guidance system for educational robots. ASABE [Internet]. [diunduh 2015 Feb 11]; 27(5): 829-838. Tersedia pada: http://scholar.google.com/citations? view_op=view_citation&hl= sv&user=stzS940AAAAJ&citation_for_view=stzS940AAAAJ:u5HHmVD_uO8C Cathode ray oscilloscope (cro). 2015. Elektronika Dasar [Internet]. [diunduh 2015 Mar 17]. Tersedia pada: http://elektronika-dasar.web.id/instrument/ cathode-ray-oscilloscope-cro/
15-31 16; Serpong, Indonesia. Serpong (ID): BPP Mektan. hlm 95-104; [diunduh 2015 Feb 16]. Tersedia pada: http://repository.ipb.ac.id/handle/ 123456789/53411 Elnahrawy E, Li X, Martin R P. 2004. The limits of localization using signal
strength: a comparative study. Di dalam: Sensor and Ad Hoc Communications and Networks. 2004 1st Annual IEEE Communications Society Conf [Internet]. 2004; New York, America. New York (US): IEEE. hlm 406‐414; [diunduh 2015 Feb
[OSU EH&S] Oregon State University, Environmental Health and Safety (US). c2015. Laser types and classification. OSU [Internet]. [diunduh 2015 Feb 25]. Tersedia pada: http://oregonstate.edu/ehs/laser/ training/laser-types-and-classification
Filter aktif high pass. 2012. Elektronika Dasar [Internet]. [diunduh 2015 Mar 17]. Tersedia pada: http://elektronika-dasar.web.id/teori-elektronika/filter-aktif-high-pass-hpf/
Hariansyah M. 2014. Desain dan pengujian sistem kontrol kedalaman terprogram untuk mole plow [disertasi]. Bogor (ID): Institut Pertanian Bogor.
Jung WG. 2005. Op Amp Applications Handbook. Burlington (US): Elsevier
Kho, D. 2014. Jenis-jenis komponen elektronika beserta fungsi dan simbolnya. Teknik Elektronika [Internet]. [diunduh 2015 Mar 3]. Tersedia pada: http://teknikelektronika.com/jenis-jenis-komponen-elektronikabeserta-fungsi-dan-simbolnya/
Operasional amplifier (op-amp). 2012. Elektronika Dasar [Internet]. [diunduh 2015 Mar 17]. Tersedia pada: http://elektronika-dasar.web.id/teori-elektronika/ operasional-amplifier-op-amp/
Pizarro D, Mazo M, Santiso E, Marron M, Jimenez D, Cobreces S, Losada C. 2010. Localization of mobile robots using odometry and an external vision sensor. Sensors. 10:3655-3680.doi:10.3390/s100403655
PWM controller ic 555. 2012. E-Belajar Elektronika [Internet]. [diunduh 2015 Juli 12]. Tersedia pada: http://e-belajarelektronika.com/pwm-controller-ic-555/
32
Lampiran 1 Spesifikasi, bentuk, dan lambang transistor
a
33 a
Sumber: Kho. (2014).
Lampiran 2 Jadwal pelaksanaan kegiatan penelitian
No Kegiatan Waktu pelaksanaan
Maret April Mei Juni Juli 1 Persiapan proposal, penentuan
besaran-besaran yang dibutuhkan 2 Pembelian alat-alat yang
dibutuhkan
3
Perancangan osiloskop, driver pengedip laser hijau, rangkaian sensor pengedip, dan modul
receiver
4 Pengujian tahap I dan tahap II 5 Pengumpulan dan analisis data
6 Pengolahan data
7 Pengulangan penelitian (jika
diperlukan)
8 Pembuatan laporan akhir
34
Lampiran 3 Rincian biaya penelitian
No Transaksi Unit Satuan
(Rp)
Jumlah (Rp)
1 Pengadaan multimeter 1 buah 55000 55000
2 Pengadaan senter laser hijau 2 buah (tergantung
jenis) 275000 3 Pengadaan komponen elektronika
yang diperlukan
(tergantung jenis)
(tergantung
jenis) 150000 4 Pengadaan IC yang diperlukan (tergantung
jenis)
(tergantung
jenis) 25000
5 Transportasi belanja 1 unit 100000 150000
6 Kertas A4 1 rim 40000 50000
Perbanyakan tugas akhir 10 buah 10000 100000
35
Lampiran 4 Gambar gelombang transmitter (VDD-kolektor)
25%-4,6V-2777,78Hz
50%-4.60V-2631.58Hz
75%-4,2V-2631,58Hz a
36
Lampiran 5 Gambar gelombang hasil penguatan receiver (kaki 1 LM 324-GND)
Siang-50m-50%-47.06%-3.70volt-2702.70Hz Siang-100m-75%-64.86%-3,80volt-2702,70Hz
Siang-150m-75%-65.79%-0,96volt-2702,70Hz Siang-200m-50%-43.24%-3.00volt-2777.78Hz
37 a
Keterangan: Waktu pengukuran-jarak transmitter-receiver-duty cycle transmitter- duty cycle receiver-tegangan yang diterima-frekuensi yang diterima
Lanjutan Lampiran 5
Sore-160m-50%-45.71%-3.40volt-2702.70Hz Sore-210m-75%-63.16%-1.26volt-2702.70Hz
38
Malam-150m-75%-45.95%-2.40volt-2702.70Hz Malam-200m-25%-26.32%-3.00volt-2631.58Hz
a
Keterangan: Waktu pengukuran-jarak transmitter receiver-duty cycle transmitter- duty cycle receiver-tegangan yang diterima-frekuensi yang diterima
RIWAYAT HIDUP
Penulis dilahirkan di Bandung pada tanggal 7 September 1993 dari ayah Priana Krisnahadi Hendimiharja dan Ibu Meggiana Mustika. Penulis adalah putra pertama dari dua bersaudara. Tahun 2011 penulis lulus dari SMA Negeri 5 Bogor dan pada tahun yang sama penulis lulus seleksi masuk Institut Pertanian Bogor (IPB) melalui jalur Seleksi Nasional Masuk Perguruan Tinggi Negeri Undangan dan diterima di Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian.