PENGARUH POSISI SIKAT TERHADAP WAKTU PENGEREMAN PADA MOTOR ARUS SEARAH PENGUATAN SHUNT
DENGAN METODE DINAMIS
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Sub Konsentrasi Teknik Energi Listrik
Oleh
SAMSON M. TAMBUNSARIBU
NIM : 090402086
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
LEMBAR PENGESAHAN TUGAS AKHIR
PENGARUH POSISI SIKAT TERHADAP WAKTU PENGEREMAN
PADA MOTOR ARUS SEARAH PENGUATAN SHUNT
DENGAN METODE DINAMIS
Oleh:
SAMSON M. TAMBUNSARIBU NIM: 090402086
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh
gelar Sarjana Teknik pada
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada tanggal 30 bulan April tahun 2014 di depan penguji:
1) Ir. Eddy Warman M.T : Ketua Penguji
2) Ir. Panusur SML.Tobing : Anggota Penguji
Disetujui oleh:
Pembimbing Tugas Akhir
Ir. Syamsul Amien M.S NIP: 195306221981031002
Diketahui oleh:
Ketua Departemen Teknik Elektro FT USU
ABSTRAK
Motor arus searah (DC) adalah motor yang digerakkan oleh energi listrik arus searah dan menghasilkan energi mekanis dalam bentuk putaran. Motor arus searah digunakan secara luas pada berbagai motor penggerak dan pengangkut dengan kecepatan yang bervariasi. Gerak atau putaran yang dihasilkan oleh motor arus searah diperoleh dari interaksi dua buah medan yang dihasilkan oleh bagian jangkar (armature) dan bagian medan (field) dari motor arus searah.
Pada prinsipnya motor sangat membutuhkan proses penghentian putaran yang cepat, yang mana proses penghentian ini disebut dengan pengereman. Dalam pengereman ada beberapa metode yang kita kenal, diantaranya adalah metode pengereman dinamis, pengereman regeneratif dan pengereman plugging. Pada tugas akhir ini akan dibahas pengaruh posisi sikat terhadap waktu pengereman pada motor arus searah penguatan shunt dengan menggunakan metode dinamis.
Dari hasil pengujian dan perhitungan dapat dilihat bahwa perubahan posisi sikat berpengaruh terhadap waktu pengereman. Demikian juga halnya dengan tahanan pengereman, tahanan pengereman berbanding lurus dengan waktu pengereman. Pada pengereman dinamik untuk tahanan pengereman yang sama, waktu pengereman tercepat berada pada posisi sikat -300 yaitu sebesar 2,770 detik dan waktu pengereman terlama berada pada posisi sikat +300 yaitu sebesar 16,657 detik.
KATA PENGANTAR
Puji dan syukur Penulis panjatkan kepada Tuhan yang Maha Kuasa karena atas berkat dan rahmat-Nya, sehingga Penulis diberikan kemampuan untuk dapat menyelesaikan tugas akhir ini, dengan judul:
“PENGARUH POSISI SIKAT TERHADAP WAKTU PENGEREMAN
PADA MOTOR ARUS SEARAH PENGUATAN SHUNT
DENGAN METODE DINAMIS”.
Adapun penulisan tugas akhir ini merupakan salah satu syarat untuk memperoleh gelar kesarjanaan pada Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
Penulis menyampaikan rasa bangga dan terimakasih yang sungguh luar biasa kepada kedua orang tua saya, Ayahanda H.Tambunsaribu dan Ibunda D.Sianturi, yang menyayangi dan telah membesarkan saya serta mendidik dan selalu mendoakan saya. Dan juga buat saudara-saudara saya, Bang Deflar B. Tambunsaribu, dan adik saya Jasi R. Tambunsaribu, Dian W. Tambunsaribu dan Nesi Tambunsaribu.
Pada kesempatan ini juga, saya mengucapkan terimakasih banyak kepada : 1. Bapak Ir. Syamsul Amin, M.S selaku dosen pembimbing Penulis yang telah
membantu dan membimbing Penulis dalam menyelesaikan tugas akhir ini. 2. Bapak Ir. Surya Tarmizi Kasim, M.Si selaku Ketua Departemen Teknik
Elektro FT-USU.
4. Bapak F. Rizal Batubara, ST. M.Ti selaku dosen wali Penulis yang telah membantu dan membimbing Penulis dalam menjalani masa perkuliahan. 5. Seluruh staf pengajar dan karyawan di Departemen Teknik Elektro Fakultas
Teknik Universitas Sumatera Utara yang telah membekali Penulis dengan ilmu pengetahuan selama menjalani perkuliahan.
6. Teman terbaik saya Nciho A.C Capah. Terimakasih atas dukungan dan doa-doanya. Teman-teman nongkrong Tian, Wanti, Reno, Dedi, David’Birong dan juga Bro Jujur Sitanggang dan Andre Chunk.
7. Seluruh teman-teman di Ikatan Mahasiswa Dairi.
8. Sahabat sekaligus teman-teman stambuk 2009 yang tidak dapat disebutkan satu persatu terutama “Sendok Community”.
9. Teman satu Kerja Praktek Joseph N, Alfonso S, Thanks F.S, Fransisco S. 10.Jesayas, Raymon, Bambang, Silvester, Rizky, yang telah membantu Penulis
dalam mengambil data di laboratorium.
Penulis menyadari bahwa tugas akhir ini masih jauh dari kata sempurna, baik itu dari segi isi maupun susunan tata bahasanya. Untuk itu Penulis dengan tangan terbuka menerima saran dan kritik dari pembaca dengan tujuan menyempurnakan dan mengembangkan tugas akhir ini. Akhir kata, Penulis berharap tugas akhir ini bisa bermanfaat dan menambah wawasan bagi para pembacanya.
Medan, Maret 2014
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iv
DAFTAR GAMBAR ... vi
DAFTAR TABEL ... viii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Tujuan dan Manfaat Penulisan ... 2
1.3 Batasan Masalah... 3
1.4 Rumusan Masalah ... 3
1.5 Metode Penulisan ... 4
1.6 Sistematika Penulisan ... 4
BAB II DASAR TEORI ... 6
2.1 Umum ... 6
2.2 Konstruksi Motor Arus Searah... 7
2.3 Prinsip Kerja Motor Arus Searah ... 13
2.4 Gaya Gerak Listrik Lawan Pada Motor Arus Searah ... 17
2.5 Reaksi Jangkar ... 18
2.6 Mengatasi Masalah Reaksi Jangkar ... 21
2.6.1 Pergeseran Sikat (Brush Shifting) ... 21
2.6.2 Kutub Bantu (Interpole) ... 23
2.6.3 Belitan Kompensasi (Compensating Windings) ... 24
2.7.1 Motor Arus Searah Penguatan Bebas ... 24
2.7.2 Motor Arus Searah Penguatan Sendiri ... 25
BAB III PENGEREMAN MOTOR ARUS SEARAH ... 30
3.1 Umum ... 30
3.2 Pengereman Plugging... 31
3.3 Pengereman Regeneratif ... 32
3.4 Pengereman Dinamis... 33
BAB IV PENGARUH POSISI SIKAT TERHADAP WAKTU PENGEREMAN PADA MOTOR ARUS SEARAH PENGUATAN SHUNT DENGAN METODE DINAMIS ... 37
4.1 Umum ... 37
4.2 Peralatan Pengujian ... 38
4.3 Spesifikasi Motor ... 38
4.4 Rangkaian Pengereman Dinamis Motor DC Penguatan Shunt ... 39
4.5 Prosedur Pengujian Pengereman Dinamis ... 40
4.6 Data Hasil Pengujian ... 41
4.7 Analisa Data Pengujian ... 44
4.8 Grafik Pengujian Beberapa Posisi Sikat Pada Pengereman Dinamis Motor Arus Searah Penguatan Shunt ... 51
BAB V KESIIMPULAN DAN SARAN ... 53
5.1 Kesimpulan ... 53
5.2 Saran Kesimpulan ... 53
DAFTAR GAMBAR
Gambar 2.1 Konstruksi Motor Arus Searah (DC) ... 7
Gambar 2.2 Konstruksi Motor Arus Searah (DC) Bagian Stator... 8
Gambar 2.3 Konstruksi Motor Arus Searah (DC) Bagian Rotor ... 8
Gambar 2.4 Konstruksi Kutub dan Penempatannya ... 9
Gambar 2.5 Sikat Pada Motor DC ... 10
Gambar 2.6 Inti Jangkar yang Berlapis-lapis ... 12
Gambar 2.7 Komutator ... 13
Gambar 2.8 Pengaruh Penempatan Konduktor Yang Dialiri Arus Listrik Dalam Medan Magnet ... 13
Gambar 2.9 Kaidah Tangan Kanan ... 14
Gambar 2.10 Prinsip Perputaran Motor Arus Searah ... 15
Gambar 2.11 Aturan Tangan Kiri Untuk Prinsip Kerja Motor DC ... 16
Gambar 2.12 Fluksi yang Dihasilkan oleh Kumparan Medan ... 18
Gambar 2.13 Fluksi yang Dihasilakn oleh Kumparan Jangkar ... 19
Gambar 2.14 Hasil Kombinasi Antara Fluksi Medan dan Fluksi Jangkar ... 20
Gambar 2.15 Pelemahan GGM Akibat Pergeseran Bidang Netral ... 22
Gambar 2.16 Kumparan Mesin DC yang Dilengkapi dengan Kutub Bantu ... 23
Gambar 2.17 Motor Arus Searah Penguatan Bebas ... 24
Gambar 2.18 Motor Arus Searah Penguatan Shunt ... 26
Gambar 2.19 Motor Arus Searah Penguatan Seri ... 27
Gambar 2.20 Motor Arus Searah Penguatan Kompond Pendek ... 28
Gambar 2.21 Motor Arus Searah Penguatan Kompond Panjang ... 29
DAFTAR TABEL
Tabel 4.1a Data Pengereman Dinamis Pada Posisi Sikat -300 ... 41
Tabel 4.1b Data Pengereman Dinamis Pada Posisi Sikat -200... 41
Tabel 4.1c Data Pengereman Dinamis Pada Posisi Sikat -100 ... 42
Tabel 4.1d Data Pengereman Dinamis Pada Posisi Sikat 00 ... 42
Tabel 4.1e Data Pengereman Dinamis Pada Posisi Sikat +200 ... 43
Tabel 4.1f Data Pengereman Dinamis Pada Posisi Sikat +300 ... 43
Tabel 4.2a Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat -300... 45
Tabel 4.2b Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat -200 ... 46
Tabel 4.2c Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat -100 ... 47
Tabel 4.2d Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat 00 ... 48
Tabel 4.2e Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat +200 ... 50
ABSTRAK
Motor arus searah (DC) adalah motor yang digerakkan oleh energi listrik arus searah dan menghasilkan energi mekanis dalam bentuk putaran. Motor arus searah digunakan secara luas pada berbagai motor penggerak dan pengangkut dengan kecepatan yang bervariasi. Gerak atau putaran yang dihasilkan oleh motor arus searah diperoleh dari interaksi dua buah medan yang dihasilkan oleh bagian jangkar (armature) dan bagian medan (field) dari motor arus searah.
Pada prinsipnya motor sangat membutuhkan proses penghentian putaran yang cepat, yang mana proses penghentian ini disebut dengan pengereman. Dalam pengereman ada beberapa metode yang kita kenal, diantaranya adalah metode pengereman dinamis, pengereman regeneratif dan pengereman plugging. Pada tugas akhir ini akan dibahas pengaruh posisi sikat terhadap waktu pengereman pada motor arus searah penguatan shunt dengan menggunakan metode dinamis.
Dari hasil pengujian dan perhitungan dapat dilihat bahwa perubahan posisi sikat berpengaruh terhadap waktu pengereman. Demikian juga halnya dengan tahanan pengereman, tahanan pengereman berbanding lurus dengan waktu pengereman. Pada pengereman dinamik untuk tahanan pengereman yang sama, waktu pengereman tercepat berada pada posisi sikat -300 yaitu sebesar 2,770 detik dan waktu pengereman terlama berada pada posisi sikat +300 yaitu sebesar 16,657 detik.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor arus searah (motor DC) berfungsi mengubah energi listrik arus searah menjadi energi mekanis. Sebuah mesin arus searah dapat digunakan baik sebagai motor arus searah maupun generator arus searah. Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminalnya, motor akan berputar pada salah satu arah, dan bila polaritas dari tegangan tersebut dibalik maka putaran motor akan terbalik pula. Polaritas dari tegangan yang diberikan pada kedua terminal menentukan arah putaran motor sedangkan besar beda tegangan pada kedua terminal menentukan kecepatan motor.
Penggunaan motor arus searah yang semakin berkembang membawa kita kembali untuk mempelajarinya lebih dalam. Khususnya pemakaiannya sebagai motor penggerak. Dalam dunia industri sistem produksi yang memerlukan kecepatan, ketepatan namun konsumsi daya yang efesien sangat diperlukan. Seperti pemakaian motor DC dalam memproduksi, mengangkat dan menurunkan ataupun menggerakkan perangkat mesin. Namun tidak setiap saat motor DC berputar perlu dilakukan yang namanya penghentian putaran atau yang disebut dengan pengereman.
yang direm berputar dengan sangat cepat maka gesekan yang terjadi pada rem akan membuat temperatur rem sangat panas. Sehingga pada keadaan ini rem membutuhkan waktu yang lama untuk kembali dingin dan dapat beroperasi kembali. Oleh karena itulah penting dilakukan pengereman secara elektrik. Pengereman elektrik dapat memperlambat motor yang sedang berputar dan menghentikannya dalam waktu yang singkat dan pulih dalam waktu yang singkat pula. Metode pengereman elektrik tersebut ada tiga, yaitu : pengereman dinamis, regeneratif dan plugging (mendadak).
Pada motor DC, pengaturan posisi sikat dalam mengantisipasi reaksi jangkar ternyata berpengaruh pada unjuk kerja, efisiensi dan torsi dari motor tersebut. Maka dengan mengatur posisi sikat-sikat pada komutator akan dapat meningkatkan performansi dari motor DC tersebut sehingga motor DC dapat bekerja lebih baik. Akibat dari pengaturan posisi sikat ini tentu juga akan berpengaruh terhadap besar kecilnya arus yang mengalir pada jangkarnya. Dengan berubahnya besar nilai arus pada jangkar akan sangat mempengaruhi terhadap cepat lambatnya waktu pengereman. Pada tugas akhir ini, penulis akan membahas tentang “PENGARUH POSISI SIKAT TERHADAP WAKTU PENGEREMAN
PADA MOTOR ARUS SEARAH PENGUATAN SHUNT DENGAN METODE DINAMIS”.
1.2 Tujuan dan Manfaat Penulisan
Adapun tujuan utama penulisan tugas akhir ini adalah :
1. Untuk mempelajari pengereman dinamis dari motor arus searah penguatan shunt.
3. Untuk mengetahui pengaruh tahanan terhadap waktu pengereman.
Manfaatnya penulisan tugas akhir ini adalah untuk memberi informasi tentang pengaruh posisi sikat terhadap waktu pengereman pada motor arus searah penguatan shunt.
1.3 Batasan Masalah
Agar tujuan penulisan tugas akhir ini sesuai dengan yang diharapkan serta terfokus pada judul dan bidang yang telah disebutkan diatas, maka penulis membatasi permasalahan yang akan dibahas sebagai berikut :
1. Motor yang dipergunakan sebagai aplikasi adalah motor arus searah penguatan shunt pada Laboratorium Konversi Energi Listrik FT.USU. 2. Motor dianggap berputar dengan kecepatan konstan ataupun dalam kedaan
steady state saat dilakukan pengereman.
3. Penelitian ini tidak membahas tentang rugi-rugi pada motor arus searah penguatan shunt.
4. Tidak membahas tentang gangguan-gangguan yang terjadi pada motor arus searah penguatan shunt.
5. Tidak membahas metode pengereman lainnya secara detail. 6. Tidak membahas motor arus searah secara detail.
1.4 Rumusan Masalah
Adapun rumusan masalah dari tugas akhir ini adalah :
1. Bagaimana pengereman motor arus searah penguatan shunt dengan metode pengereman dinamis?
1.5 Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan beberapa metode penulisan diantaranya adalah sebagai berikut.
a) Studi Literatur
Berupa studi kepustakaan dan kajian dari berbagai sumber pustaka yang relevan dan mendukung dalam penulisan tugas akhir ini.
b) Studi Lapangan
Melakukan percobaan di Laboratorium Konversi Energi Listrik Departemen Teknik Elektro, Fakultas Teknik USU.
c) Studi Bimbingan
Penulis melakukan diskusi dan konsultasi dengan dosen pembimbing atau pun dengan staf pengajar lainnya di Departemen Teknik Elektro FT-USU, mengenai masalah-masalah yang timbul selama penulisan Tugas Akhir ini berlangsung.
1.6 Sistematika Penulisan
Adapun sistematika penulisan tugas akhir ini adalah sebagai berikut:
ABSTRAK
BAB I PENDAHULUAN
BAB II DASAR TEORI
Bab ini membahas tentang motor arus searah, konstruksi motor arus searah, prinsip kerja motor arus searah, GGL lawan, reaksi jangkar dan bagaimana mengatasinya, jenis-jenis motor arus searah, dan karakteristik motor arus searah penguatan shunt.
BAB III PENGEREMAN MOTOR ARUS SEARAH
Bab ini membahas tentang jenis-jenis pengereman pada motor arus searah terutama tentang pengereman dinamis pada motor arus searah penguatan shunt. Selain itu bab ini juga akan membahas rangkaian kontrol atau rangkaian pengereman dinamis secara lengkap dan bagaimana prinsip kerja rangkaiannya.
BAB IV PENGARUH POSISI SIKAT TERHADAP WAKTU
PENGEREMAN PADA MOTOR DC PENGUATAN SHUNT
DENGAN METODE DINAMIS
Bab ini membahas tentang proses pengambilan data dan spesifikasi peralatan pada percobaan-percobaan yang dilakukan dan bagaimana cara menganalisanya.
BAB V PENUTUP
BAB II
DASAR TEORI
2.1 Umum(1,2,4)
Secara sederhana motor arus searah dapat didefenisikan sebagai suatu mesin listrik yang mengubah energi listrik pada arus searah (DC) menjadi energi gerak atau energi mekanik, dimana energi gerak tersebut berupa putaran pada bagian yang disebut rotor. Pada prinsipnya operasi motor arus searah sangat identik dengan generator arus searah. Kenyataannya mesin yang bekerja sebagai generator arus searah akan dapat bekerja sebagai motor arus searah. Oleh sebab itu, sebuah mesin arus searah dapat digunakan baik sebagai motor arus searah maupun generator arus searah.
Secara umum motor arus searah terdiri dari bagian stator (bagian yang diam) dan bagian rotor (bagian yang berputar). Pada bagian yang diam (stator) merupakan tempat diletakkannya kumparan medan yang berfungsi untuk menghasilkan fluksi magnet, sedangkan bagian yang berputar (rotor) ditempati oleh rangkaian jangkar seperti kumparan jangkar, komutator dan sikat.
Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi magnetik. Dimana kumparan medan akan menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar akan menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi magnet ini menimbulkan suatu gaya. Gaya yang timbul tersebut akan menghasilkan putaran atau torsi.
dinamis dan keadaan steady-state. Motor arus searah mempunyai pengaturan yang sangat mudah dilakukan dalam berbagai kecepatan dan beban yang bervariasi. Itu sebabnya motor arus searah digunakan pada berbagai aplikasi tersebut. Pengaturan kecepatan ini dapat dilakukan dengan memperbesar atau memperkecil arus yang mengalir pada jangkar menggunakan sebuah tahanan.
2.2 Konstruksi Motor Arus Searah(1,2,7)
Secara umum motor arus searah memiliki konstruksi yang sama, terbagi atas dua bagian, yaitu : bagian yang diam dan bagian yang bergerak. Bagian yang diam disebut stator dan bagian yang berputar/bergerak disebut rotor. Untuk lebih jelasnya dapat dilihat pada Gambar 2.1 di bawah ini:
Gambar 2.2 Konstruksi Motor Arus Searah(DC) Bagian Stator
Gambar 2.3 Konstruksi Motor Arus Searah (DC) Bagian Rotor
1. Badan Motor (Rangka)
mesin tersebut. Rangka (frame atau yoke) mesin arus searah seperti juga mesin-mesin listrik lainnya secara umum memiliki dua fungsi, yaitu:
1. Untuk membawa fluks magnetik yang dihasilkan oleh kutub-kutub magnet.
2. Merupakan sarana pendukung mekanik untuk mesin secara keseluruhan. Rangka dibuat dengan menggunakan bahan ferromagnetik yang memiliki permeabilitas tinggi. Rangka biasanya terbuat dari baja tuang (cast steel) atau baja lembaran (rolled steel) yang berfungsi sebagai penopang mekanis dan juga sebagai bagian dari rangkaian magnet. Biasanya pada badan (rangka) motor terdapat papan nama (name plate) yang bertuliskan spesifikasi umum atau data-data teknik dari mesin tersebut.
2. Kutub Medan
Kutub medan terdiri atas inti kutub dan sepatu kutub. Sepatu kutub yang berdekatan dengan celah udara dibuat lebih besar dari badan inti. Dimana fungsinya adalah untuk menahan kumparan medan di tempatnya dan menghasilkan distribusi fluksi yang lebih baik yang tersebar di seluruh jangkar dengan menggunakan permukaan yang melengkung.
Inti kutub terbuat dari laminasi pelat-pelat baja yang terisolasi satu sama lain. Sepatu kutub dilaminasi dan dibaut ke inti kutub. Maka kutub medan (inti kutub dan sepatu kutub) direkatkan bersama-sama kemudian dibaut pada rangka. Pada inti kutub ini dibelitkan kumparan medan yang terbuat dari kawat tembaga yang berfungsi untuk menghasilkan fluksi magnetik.
3. Sikat
Sikat adalah jembatan bagi aliran arus ke lilitan jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik. Sikat memegang peranan penting untuk terjadinya komutasi. Sikat-sikat terbuat dari bahan karbon dengan tingkat kekerasan yang bermacam-macam dan dalam beberapa hal dibuat dari campuran karbon dan logam tembaga. Sikat harus lebih lunak daripada segmen-segmen komutator supaya gesekan yang terjadi antara segmen-segmen komutator dan sikat tidak mengakibatkan ausnya komutator.
Gambar 2.5 Sikat Pada Motor DC
4. Kumparan Medan
bulat atapun persegi. Rangkaian medan yang berfungsi untuk menghasilkan fluksi utama dibentuk dari kumparan pada setiap kutub. Pada aplikasinya rangkaian medan dapat dihubungkan dengan kumparan jangkar baik seri maupun paralel dan juga dihubungkan tersendiri langsung kepada sumber tegangan sesuai dengan jenis penguatan pada motor.
5. Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat dibangkitkannya ggl induksi. Pada motor arus searah penguatan kompon pendek kumparan medan serinya diparalel terhadap kumparan jangkar, sedangkan pada motor arus searah penguatan kompon panjang kumparan medan serinya diserikan terhadap kumparan jangkar. Konstruksi kumparan jangkar pada rotor ada tiga macam yaitu:
1. Kumparan jerat (lap winding)
2. Kumparan gelombang (wave winding) 3. Kumparan zig-zag (frog-leg winding)
6. Inti Jangkar
terbentuk karena adanya arus linier seperti ditunjukkan pada Gambar 2. di bawah ini.
Gambar 2.6 Inti Jangkar yang Berlapis-lapis
7. Komutator
Gambar 2.7 Komutator
8. Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan permukaan sepatu kutub yang menyebabkan jangkar tidak bergesekan dengan sepatu kutub.
2.3 Prinsip Kerja Motor Arus Searah(3,4,7)
Sebuah konduktor mempunyai medan magnet disekelilingnya apabila konduktor tersebut dialiri oleh arus listrik. Pada saat konduktor yang dialiri arus listrik ditempatkan pada suatu medan magnet, maka konduktor akan mengalami gaya mekanik, seperti diperlihatkan pada Gambar 2.8 di bawah.
Pada Gambar 2.8.a menggambarkan sebuah konduktor yang dialiri arus listrik menghasilkan medan magnet disekelilingnya. Arah medan magnet yang dihasilkan oleh konduktor dapat diperoleh dengan menggunakan kaidah tangan kanan. Untuk lebih jelasnya perhatikan Gambar 2.9 berikut ini.
Gambar 2.9 Kaidah tangan kanan
Kuat medan tergantung pada besarnya arus yang mengalir pada konduktor. Sedangkan Gambar 2.8.b menunjukkan sebuah medan magnet yang diakibatkan oleh kutub-kutub magnet utara dan selatan. Arah medan magnet adalah dari kutub utara menuju kutub selatan.
Pada saat konduktor dengan arah menjauhi pembaca ditempatkan di dalam medan magnet seragam, maka medan gabungnya akan seperti yang ditunjukkan pada Gambar 2.8.c. Daerah di atas konduktor, medan yang ditimbulkan konduktor adalah dari kiri ke kanan, atau pada arah yang sama dengan medan utama. Sementara di bawahnya, garis-garis magnet dari konduktor arahnya berlawanan dengan medan utama. Hasilnya adalah memperkuat medan atau menambah kerapatan fluksi di atas konduktor dan melemahkan medan atau mengurangi kerapatan fluksi di bawah konduktor.
mengurangi kerapatannya. Hal ini menyebabkan konduktor mengalami gaya berupa dorongan ke arah bawah. Begitu juga halnya bila arah arus dalam konduktor dibalik. Kerapatan fluksi yang berada di bawah konduktor akan bertambah sedangkan kerapatan fluksi di atas konduktor berkurang. Sehingga konduktor akan mendapatkan gaya tolak ke arah atas. Konduktor yang mengalirkan arus dalam medan magnet cenderung bergerak tegak lurus terhadap medan.
Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambar berikut.
Gambar 2.10 Prinsip perputaran motor arus searah
ini akan memotong fluksi dari kumparan medan sehingga menyebabkan perubahan kerapatan fluksi dari medan utama. Hal ini menyebabkan jangkar mengalami gaya sehingga menimbulakn torsi.
Gaya yang dihasilkan pada setiap konduktor dari sebuah jangkar, merupakan akibat aksi gabungan medan utama dan medan di sekeliling konduktor. Gaya yang dihasilkan berbanding lurus dengan besar fluksi medan utama dan kuat medan di sekeliling konduktor. Medan di sekeliling masing-masing konduktor jangkar tergantung pada besarnya arus jangkar yang mengalir pada konduktor tersebut. Arah gaya ini dapat ditentukan dengan kaidah tangan kiri.
Gambar 2.11 Aturan tangan kiri untuk prinsip kerja motor DC Besarnya gaya F = B . I . l . sin θ, karena arus jangkar I tegak lurus dengan arah induksi magnetik B maka besar gaya yang dihasilkan oleh arus yang mengalir pada konduktor jangkar yang ditempatkan dalam suatu medan magnet adalah : F = B . I . l Newton . . . . . . . . .(2.1) Dimana :
F = gaya Lorentz [Newton] I = arus [Ampere]
B = kerapatan fluksi [Webber/m2] Sedangkan torsi yang dihasilkan motor adalah :
T = F . r . . . . . . .(2.2) Bila torsi yang dihasilkan motor lebih besar dari pada torsi beban maka motor akan berputar. Besar torsi beban dapat dituliskan dengan:
T = K .Φ. Ia . . . . . . .(2.3)
K = � .
� . . . . . . . . . .(2.4)
Dimana : T = torsi [N-m] r = jari-jari [m]
K = konstanta [tergantung pada ukuran fisik motor]
Φ = fluksi setiap kutub
Ia = arus jangkar [A] p = jumlah kutub z = jumlah konduktor a = cabang paralel
2.4 Gaya Gerak Listrik Lawan Pada Motor Arus Searah (1,2,6,7)
Eb = �
� �
(volt)
. . . (2.5)
Persamaan tegangan secara umum dapat dituliskan sebagai berikut:
Eb
=
�′ . � . �
. . . (2.6)Dimana: �′ = konstanta = �
. . . .(2.7)
2.5 Reaksi Jangkar (1,2,4,7)
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus pada jangkar, dimana jangkar tersebut berada di dalam medan magnet. Reaksi jangkar menyebabkan terjadinya dua hal seperti :
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama 2. Magnetisasi silang.
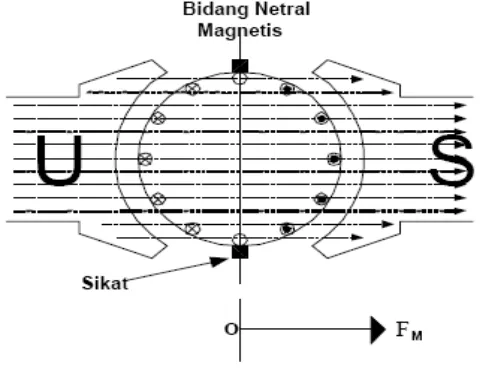
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak dialiri oleh arus, maka dengan mangabaikan pengaruh celah udara, jalur fluksi ideal untuk kutub utama dari motor arus searah dua kutub, berasal dari kutub utara menuju kutub selatan seperti pada Gambar 2.12 berikut.
Dari Gambar 2.12 dapat dijelaskan bahwa :
1. Fluksi didistribusikan simetris terhadap bidang netral magnetis. 2. Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefenisikan sebagai bidang di dalam motor dimana konduktor bergerak sejajar dengan garis gaya magnet sehingga gaya gerak listrik induksi konduktor pada bidang tersebut adalah nol. Bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari fluksi medan utama, dimana vektor ini tegak lurus terhadap bidang netral magnetis.
Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul ggm atau fluksi. Arah garis gaya magnet dapat dilihat pada Gambar 2.13 berikut.
Gambar 2.13 Fluksi yang Dihasilakn oleh Kumparan Jangkar
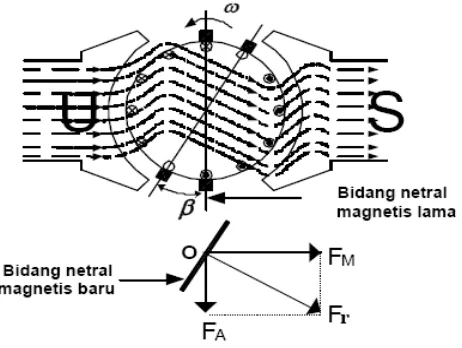
konduktor medan sama-sama dialiri oleh arus listrik. Distribusi fluksi resultan diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karenanya distribusi fluksi medan utama yang melalui jangkar tidak lagi simetris tetapi sudah mengalami pembelokan saat mendekati konduktor yang dialiri arus tersebut. Hal tersebut dikarenakan pengaruh fluksi jangkar yang dapat dilihat pada Gambar 2.14.
Fluksi yang dihasilkan oleh gaya gerak magnet (ggm) jangkar menentang fluksi medan utama pada setengah bagian dari salah satu kutubnya dan memperkuat fluksi medan utama pada setengah bagian yang lainnya. Hal ini jelas akan menyebabkan penurunan kerapatan fluksi pada setengah bagian dari salah satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang sama. Efek dari intensitas medan magnet atau lintasan fluksi pada jangkar yang memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar magnetisasi silang (cross magnetization).
Gambar 2.14 Hasil Kombinasi antara Fluksi Medan dan Fluksi Jangkar
serta posisi bidang netral magnetis yang baru, dimana selalu tegak lurus terhadap vektor OFr. Bidang netral magnetis motor yang baru bergeser sejauh β karena posisi bidang netral magnetis ini selalu tegak lurus terhadap vektor OF. Dengan pergeseran bidang netral ini maka sikat juga akan bergeser sejauh pergeseran bidang netral magnetis. Hal ini dapat menimbulkan bunga api di segmen komutator dekat sikat.
2.6 Mengatasi Masalah Reaksi Jangkar(1,2,6,9)
Ada tiga cara untuk mengatasi permasalahan yang timbul akibat reaksi jangkar, yaitu:
1. Pergeseran sikat (brush shifting) 2. Kutub bantu (interpole)
3. Belitan kompensasi (compensating windings)
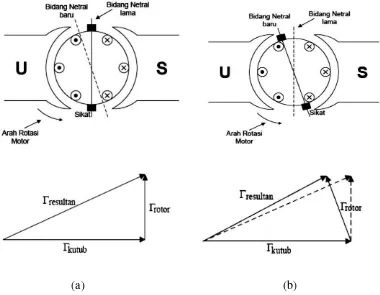
2.6.1 Pergeseran Sikat (Brush Shifting)
(a) (b)
Gambar 2.15 Pelemahan GGM Akibat Pergeseran Bidang Netral
Pada Gambar 2.15(a) diperlihatkan kondisi ketika bidang netral mesin bergeser (lihat gambar segitiga ggm), sedangkan pada Gambar 2.15(b) terlihat bidang netral yang bergeser disertai dengan bergesernya sikat mesin. Akibat pergeseran tersebut terlihat ggm resultannya melemah sedemikian rupa.
berpengaruh terhadap besar kecilnya arus yang mengalir pada jangkarnya. Dengan berubahnya besar nilai arus pada jangkar akan sangat mempengaruhi terhadap cepat lambatnya waktu pengereman.
2.6.2 Kutub Bantu (Interpole)
Jika nilai tegangan pada kawat-kawat yang sedang melakukan proses penyearahan dibuat nol, maka tidak akan terdapat percikan bunga api pada sikat-sikat mesin tersebut. Untuk itu, kutub-kutub kecil yang disebut kutub komutasi ditempatkan ditengah-tengah diantara kutub-kutub utama. Interpole ini dihubungkan seri terhadap kumparan rotor. Sehingga dengan adanya fluks dari interpole ini akan dapat mencegah atau mengurangi adanya tegangan yang muncul pada kawat-kawat yang sedang melakukan proses komutasi.
Ketika beban yang dipikul mesin meningkat dan arus rotor pun meningkat, besarnya perubahan/ pergeseran bidang netral meningkat pula. Hal tersebut akan menyebabkan timbulnya tegangan pada konduktor-konduktor yang sedang melakukan komutasi. Pada saat itu fluks interpole juga meningkat, menghasilkan tegangan pada konduktor-konduktor tersebut dan berlawanan dengan tegangan yang timbul akibat pergeseran bidang netral.
2.6.3 Belitan Kompensasi (Compensating Windings)
Untuk kerja motor yang berat masalah pelemahan fluksi menjadi sangat penting. Untuk mengatasi masalah tersebut salah satunya dengan menambah belitan kompensasi. Belitan kompensasi ini dihubungkan seri terhadap kumparan jangkar. Belitan kompensasi ini bertujuan untuk mengurangi penyimpangan yang timbul akibat reaksi jangkar.
2.7 Jenis - Jenis Motor Arus Searah(1,2,3,4)
Jenis-jenis motor arus searah dapat dibedakan berdasarkan jenis penguatannya, yaitu hubungan rangkaian kumparan medan dengan kumparan jangkar. Sehingga motor arus searah dibedakan menjadi:
2.7.1 Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber tegangan penguatannya berasal dari luar motor. Di mana kumparan medan disuplai dari sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus searah penguatan bebas dapat dilihat pada Gambar 2.17 di bawah ini:
Persamaan umum motor arus searah penguatan bebas :
Vt = Ea + Ia Ra . . . .(2.8) Vf = If . Rf . . . .(2.9)
Dimana : Vt = tegangan terminal jangkar motor arus searah (Volt) Ia = arus jangkar (A)
Ra = tahanan jangkar (Ohm)
If = arus medan penguatan bebas (A)
Rf = tahanan medan penguatan bebas (Ohm)
Vf = tegangan terminal medan penguatan bebas (Volt) Ea = gaya gerak listrik motor arus searah (Volt)
2.7.2 Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri dibagi atas tiga, yaitu: 1. Motor arus searah penguatan shunt
2. Motor arus searah penguatan seri 3. Motor arus searah penguatan kompond
1) Motor arus searah penguatan kompond pendek 2) Motor arus searah penguatan kompond panjang
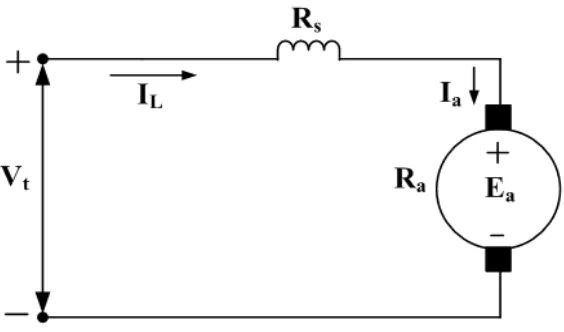
2.7.2.1 Motor Arus Searah Penguatan Shunt
Gambar 2.18 Motor Arus Searah Penguatan Shunt
Persamaan umum motor arus searah penguatan shunt :
Vt = Ea + Ia Ra . . . .(2.10) Vsh = Vt = Ish . Rsh. . . (2.11) IL = Ia + Ish. . . (2.12) Dimana :
Ish = arus kumparan medan shunt (A)
Vsh = tegangan terminal medan motor arus searah (Volt) Rsh = tahanan medan shunt (Ohm)
IL = arus beban (A)
2.7.2.2 Motor Arus Searah Penguatan Seri
Gambar 2.19 Motor Arus Searah Penguatan Seri
Kumparan medan terbuat dari sejumlah kecil kumparan dengan penampang kawat yang besar. Tipe demikian dirancang untuk mengalirkan arus besar dan terhubung seri dengan kumparan rotor. Rangkaian ekivalen motor arus searah penguatan seri dapat dilihat pada Gambar 2.19.
Persamaan umum motor arus searah penguatan seri :
Vt = Ea + Ia ( Ra + Rs ) . . . .(2.13)
Ia =
[
� − �
� + �
]
. . . (2.14)Ia = IL. . . .(2.15)
2.7.2.3 Motor Arus Searah Penguatan Kompond
pula torsi penyalaan awal yang dapat ditangani. Motor arus searah penguatan kompond terbagi atas dua, yaitu :
1. Motor Arus Searah Penguatan Kompond Pendek
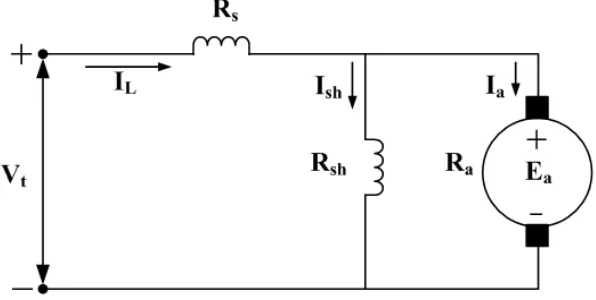
Pada motor arus searah penguatan kompon pendek, kumparan medan serinya terhubung secara paralel terhadap kumparan jangkar dan kumparan medan shunt. Rangkaian ekivalen motor arus searah penguatan kompond pendek dapat dilihat pada Gambar 2.20 berikut :
Gambar 2.20 Motor Arus Searah Penguatan Kompond Pendek
Persamaan umum motor arus searah penguatan kompon pendek :
IL = Ia + Ish. . . .(2.16) Vt = Ea + IL . Rs + Ia . Ra. . . (2.17) Pin = Vt . IL. . . .(2.18) Dimana :
2. Motor Arus Searah Penguatan Kompon Panjang
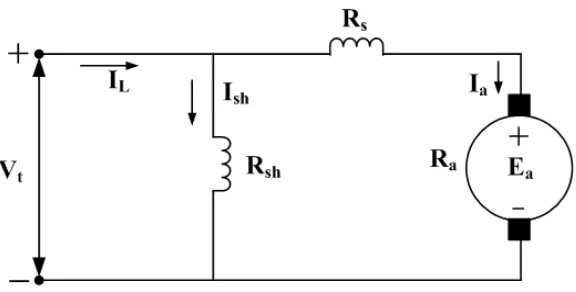
Rangkaian ekivalen motor arus searah penguatan kompond panjang dapat dilihat pada Gambar 2.21 berikut :
Gambar 2.21 Motor Arus Searah Penguatan Kompond Panjang
Pada motor arus searah penguatan kompon panjang, kumparan medan serinya tehubung secara seri terhadap kumparan jangkarnya dan terhubung paralel terhadap kumparan medan shunt.
Persamaan umum motor arus searah penguatan kompon panjang :
IL = Ia + Ish . . . (2.19)
Vt = Ea + Ia (Rs + Ra) . . . (2.20) Pin = Vt . IL . . . .(2.21)
BAB III
PENGEREMAN MOTOR ARUS SEARAH
3.1 Umum(5,6,8)
Pengereman motor arus searah atau motor arus searah penguatan shunt adalah suatu usaha atau gaya yang diberikan terhadap motor arus searah yang sedang berputar agar motor mengalami perlambatan ataupun berhenti dalam waktu yang singkat. Dalam hal pengereman massa sebuah benda akan sangat penting juga kita perhatikan karena massa sangat erat kaitannya dengan tindakan pengereman. Untuk benda-benda dengan massa yang kecil tentu tidak perlu melakukan pengereman karena dengan memutus daya atau sumber energinya benda tersebut sudah bisa berhenti dengan cepat dan ini tidak berbahaya, misalnya pada putaran kipas angin.
Pada motor listrik seperti motor-motor traksi dan motor yang digunakan untuk alat pengangkat, pengereman merupakan suatu persoalan yang sangat penting. Dimana suatu sistem pengereman sangat menentukan keamanan dan keselamatan pada motor yang digunakan pada berbagai aplikasi.
3.2 Pengereman Plugging(5,6,8)
Pengereman plugging atau pengereman mendadak adalah adalah pengereman suatu motor yang terjadi dalam waktu yang singkat dan tiba-tiba. Prinsip pengereman plugging ini adalah dengan cara membalik polaritas sebuah motor arus searah.
Membalik putaran motor dilakukan dengan cara membalik arah arus jangkar (Ia). Pada saat motor berputar pada kecepatan nominal, jika arah arus jangkar dibalik arahnya maka akan timbul torsi baru yang berlawanan arah dengan torsi mula-mula. Torsi ini dipengaruhi oleh besar arus yang mengalir pada tahanan jangkar. Untuk membatasi arus yang mengalir pada jangkar dipasang tahanan yang diserikan dengan tahanan jangkar. Besar tahanan yang diserikan dengan tahanan jangkar ini akan mempengaruhi waktu mulai saat pengereman dilakukan sampai motor berhenti berputar.
Pada pengereman plugging saat kecepatan putaran motor menjadi nol maka sumber tegangan harus dilepas dari kumparan jangkar, jika pada kumparan jangkar masih tetap mengalir arus maka motor akan kembali berputar dengan arah yang berlawanan. Rangkaian pengereman plugging dengan membalik arus jangkar ( Ia ) dapat dilihat seperti pada Gambar 3.1.
Pada kondisi ini arus yang mengalir pada kumparan medan akan tetap sedangkan arus yang mengalir pada kumparan jangkar arahnya akan berubah dari HB ke GA.
C4
Gambar 3.1 Rangkaian Pengereman Plugging dengan Membalik Arus Jangkar
Hal ini menyebabkan timbunya torsi yang baru yang berlawanan arah dengan torsi mula-mula sehingga mengurangi kecepatan motor sampai akhirnya berhenti. Setelah kecepatan motor mencapai nol atau sudah berhenti maka sumber tegangan Vt dilepas untuk menghindari motor berputar pada arah yang berlawanan. Pada saat pengereman dilakukan rangkaian tehubung dengan tahanan pengereman Rp yang berfungsi untuk menjaga agar arus yang mengalir pada kumparan jangkar tidak terlalu besar.
3.3 Pengereman Regeneratif(5,6)
kecepatan motor yang melebihi kecepatan nominalnya maka besar Ea akan lebih besar dari Vt. Sehingga ini akan mengakibatkan daya dikembalikan kepada sistem jala-jala untuk keperluan lain. Pada saat daya dikembalikan ke jala-jala kecepatan menurun dan proses pengereman seperti pengereman dinamis.
3.4 Pengereman Dinamis(5,6,7,8)
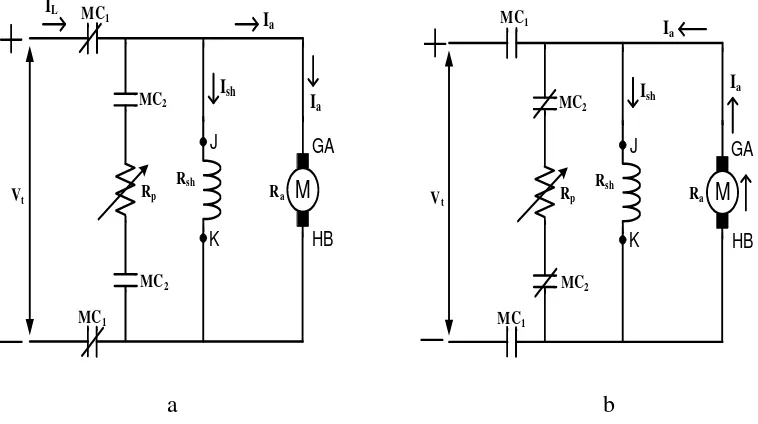
Pengereman dinamis merupakan salah satu metode pengereman motor listrik yang sangat praktis dan memberikan gaya pengereman yang sangat baik. Dengan alasan itu maka pengereman ini sangat baik digunakan pada sistem pengereman untuk waktu yang sangat singkat karena motor dapat berhenti dengan cepat. Pengereman ini dilakukan dengan memutuskan suplai tegangan ke sebuah motor yang sedang berputar (berjalan) lalu dihubungkan dengan sebuah tahanan pada terminal jangkarnya.
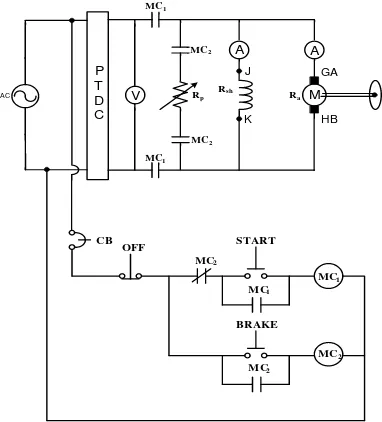
Gambar 3.2 merupakan salah satu rangkaian pengereman dinamis pada motor shunt. Dari Gambar 3.2 tersebut dapat dijelaskan bahwa pengereman dinamis dilakukan dengan cara memutuskan supplai tegangan ke sebuah motor yang sedang berjalan dengan terbukanya kontaktor MC1 lalu dihubungkan dengan sebuah tahanan (Rp) pada terminal jangkarnya dengan cara tertutupnya kontaktor MC2. Keadaan ini akan menyebabkan energi yang dihasilkan oleh jangkar akibat dari putaran akan dilepas melalui tahanan dalam bentuk panas. Dengan kata lain motor berlaku sebagai generator yang mengalirkan arus menuju tahanan.
Ketika pengereman dilakukan, besar arus yang mengalir pada waktu pengereman dinamis motor arus searah penguatan shunt dirumuskan sebagai berikut :
Iarem
=
�� + ����. . . (3.1)
dimana Ra adalah tahanan jangkar, Rp adalah tahanan pengereman dan Er adalah besar gaya gerak listrik motor arus searah saat pengereman.
Dan besar torsi pengeremannya adalah :
Trem = Er x
� ��
� = Ea x
� ��
� . . . . . . .(3.2)
Dimana ��adalah kecepatan sudut saat pengereman atau rpm dalam rad/sec saat pengereman , �� kecepatan sudut sebelum pengereman atau rpm dalam rad/sec sebelum pengereman, Ea adalah besar gaya gerak istrik motor arus searah sebelum pengereman.
MC2 yang Normally Open akan menutup dan MC2 yang Normally Close akan membuka. Dengan membukanya Normally Close MC2 mengakibatkan MC1 yang sebelumnya energize (tertutup) akan membuka. Pada kondisi ini supply tegangan terminal Vt akan terputus dari kumparan jangkar. Seketika itu juga sebuah tahanan Rp akan otomatis terhubung dengan rangkaian dan tahanan ini berfungsi sebagai tahanan pengereman. Sehingga arus yang mengalir pada kumparan medan Rsh akan tetap arahnya dari J ke K dan arus yang mengalir pada kumparan jangkar arahnya dari HB ke GA. Dalam hal ini motor akan berlaku sebagai generator dan arus pengereman akan mengalir melalui tahanan pengereman Rp. Energi yang dimiliki oleh jangkar yang diakibatkan oleh perputaran akan dilepas melalui tahanan dalam bentuk panas yang menyebabkan kecepatan motor berkurang dan akhirnya berhenti.
Sesaat setelah tombol BRAKE ditekan, tahanan pengereman Rp akan terhubung ke rangkaian jangkar motor. Arus yang mengalir pada saat itu tidak akan turun secara drastis, namun secara perlahan. Penurunan arus ini diakibatkan oleh adanya ggl induksi pada kumparan jangkar sebelum pengereman.
BAB IV
PENGARUH POSISI SIKAT TERHADAP WAKTU
PENGEREMAN PADA MOTOR ARUS SEARAH PENGUATAN SHUNT
DENGAN METODE DINAMIS
4.1 Umum
Pengereman dinamis dilakukan dengan memutuskan suplai tegangan ke sebuah motor yang sedang berputar (berjalan) lalu dihubungkan dengan sebuah tahanan pada terminal jangkarnya. Dalam hal ini motor akan berlaku sebagai generator dan arus pengereman akan mengalir melalui tahanan pengereman. Energi yang dimiliki oleh jangkar akan dilepas melalui tahanan dalam bentuk panas yang menyebabkan kecepatan motor berkurang dan akhirnya berhenti.
Pengaturan posisi sikat dalam mengantisipasi reaksi jangkar ternyata berpengaruh pada unjuk kerja, efisiensi dan torsi dari motor tersebut. Maka dengan mengatur posisi sikat-sikat pada komutator akan dapat meningkatkan performansi dari motor DC tersebut sehingga motor DC dapat bekerja lebih baik. Akibat dari pengaturan posisi sikat ini tentu juga akan berpengaruh terhadap besar kecilnya arus yang mengalir pada jangkarnya. Dengan berubahnya besar nilai arus pada jangkar akan sangat mempengaruhi terhadap cepat lambatnya waktu pengereman.
(+200 dan +300). Posisi +100 tidak diikutkan dalam tugas akhir ini karena pada posisi tersebut putaran motor arus searah penguatan shunt tidak sampai pada putaran nominal yang diinginkan.
4.2 Peralatan Pengujian
1. Motor Arus Searah AEG 1,2 KW 2. 1 Unit Power Pack MV 1300 3. 1 Unit Tahanan Geser
4. 1 Volt Meter 5. 2 Ampere Meter 6. 2 Magnetic Kontaktor
7. Kabel Penghubung Secukupnya 8. Stop Watch
4.3 Spesifikasi Motor
P = 1.2 KW IL = 7.1 A Ish = 0.177 A N = 1400 rpm Lap Winding
Jumlah Kutub = 2
Komutator = 81
Kelas Isolasi = B
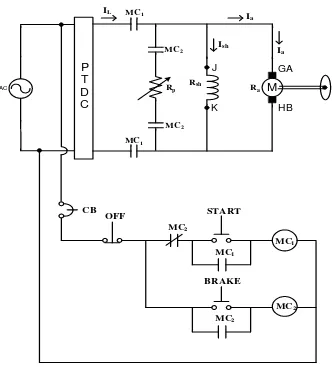
4.4 Rangkaian Pengereman Dinamis Motor DC Penguatan Shunt
4.5 Prosedur Pengujian Pengereman Dinamis
1. Peralatan dirangkai seperti pada Gambar 4.1 dan posisi sikat pada 00. 2. Atur tahanan pengereman Rp sebesar 20 Ω pada tahanan geser. 3. Tekan tombol START.
4. Atur tegangan suplai sampai motor mencapai putaran 1400 rpm, kemudian catat besar tegangan suplai Vt, arus medan If, dan arus jangkar Ia sebelum pengereman.
5. Tekan tombol BRAKE dan catat waktu pengereman mulai dari tombol BRAKE ditekan sampai putaran motor menjadi nol. Catat juga arus jangkar pada saat pengereman.
6. Saat putaran motor mencapai nol tekan tombol OFF.
7. Prosedur yang sama dilakukan untuk besar tahanan pengereman yang lain yakni 30 Ω, 40 Ω, 50 Ω, dan 60 Ω.
8. Matikan suplai tegangan lalu atur posisi sikat sesuai dengan yang diinginkan. Kemudian ulangi langkah 2 sampai langkah 7 hingga diperoleh data tiap posisi sudut yang diinginkan.
4.6 Data Hasil Pengujian
Dari hasil pengujian diperoleh data-data sebagai berikut : 1. Posisi Sikat -300
Data pada saat keadaan motor belum direm :
Vt = 143 Volt Ia = 2.21A
If = 0.12A n = 1400 rpm
Tabel 4.1a Data Pengereman Dinamis Pada Posisi Sikat -300
Rp
Data pada saat keadaan motor belum direm :
Vt = 100 Volt; Ia= 2.06A; If = 0.08A; n = 1400 rpm Tabel 4.1b Data Pengereman Dinamis Pada Posisi Sikat -200
3. Posisi Sikat -100
Data pada saat keadaan motor belum direm :
Vt = 75 Volt; Ia = 2.01A; If = 0.06A; n = 1400 rpm Tabel 4.1c Data Pengereman Dinamis Pada Posisi Sikat -100
Rp
Data pada saat keadaan motor belum direm :
Vt = 62 Volt; Ia = 2.12A; If = 0.05A; n = 1400 rpm Tabel 4.1d Data Pengereman Dinamis Pada Posisi Sikat 00
5. Posisi sikat 200
Data pada saat keadaan motor belum direm :
Vt = 60 Volt; Ia = 8.56A; If = 0.05A; n = 1400 rpm Tabel 4.1e Data Pengereman Dinamis Pada Posisi Sikat 200
Rp
Data pada saat keadaan motor belum direm :
Vt = 42 Volt; Ia = 5.19A; If = 0.04A; n = 1400 rpm Tabel 4.1f Data Pengereman Dinamis Pada Posisi Sikat 300
4.7 Analisa Data Pengujian
1. Posisi Sikat -300
Dari data-data sebelum pengereman diperoleh : IL = If + Ia = 0,12 + 2,21 = 2,33A
Ea = Vt– (Ia x Ra) Ea = 143 – (2,21 x 3,8) Ea = 134,602 Volt
Dari hasil pengujian (Tabel 4.1a) diambil nilai rata-ratanya : Misal :
Data 1 pada Tabel 4.1a data pengereman dinamis pada posisi sikat -300
Ia,rem
̅̅̅̅̅̅ = Ia,rem +Ia,rem +Ia,rem = , + , + , = , = 3,45A
t̅ = t + t + t = , + , + , = , = 2,770 detik
ω̅ = rp
x π rad/sec
= x π = 146,533 rad/sec
maka, Trem = E
a x Ia,rem ω
= , x ,
, = 3,16 N-m
Tabel 4.2a Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat -300
Rp ( Ohm ) Ia,rem (Amp) t(detik) Trem (N-m)
20 3,45 2,770 3,16
30 2,89 2,977 2,65
40 1,96 3,828 1,80
50 1,82 4,326 1,67
60 1,45 4,835 1,33
2. Posisi Sikat -200
Dari data-data sebelum pengereman diperoleh : IL = If + Ia = 0,08 + 2,06 = 2,14 A
Ea = Vt– (Ia x Ra) Ea = 100 – (2,06 x 3,8) Ea = 92,172 Volt
Dari hasil pengujian (Tabel 4.1b) diambil nilai rata-ratanya : Misal :
Data 1 pada Tabel 4.1b data pengereman dinamis pada posisi sikat -200
Ia,rem
̅̅̅̅̅̅ = Ia,rem +Ia,rem +Ia,rem = , + , + , = , = 2,85 A
t̅ = t + t + t = , + , + , = , = 3,813 detik
ω̅ = rp
x π rad/sec
= x π = 146,533 rad/sec
maka, Trem =
= , x ,
, = 1,79 N-m
Cara perhitungan yang sama dilakukan untuk data yang lain sehingga didapatkan hasilnya sebagai berikut :
Tabel 4.2b Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat -200
Rp ( Ohm ) Ia,rem (Amp) t(detik) Trem (N-m)
20 2,85 3,813 1,79
30 2,26 4,454 1,42
40 1,76 4,743 1,10
50 1,44 5,285 0,90
60 1,05 5,739 0,66
3. Posisi Sikat -100
Dari data-data sebelum pengereman diperoleh : IL = If + Ia = 0,06 + 2,01 = 2,07 A
Ea = Vt– (Ia x Ra) Ea = 75 – (2,01 x 3,8) Ea = 67,362 Volt
Dari hasil pengujian (Tabel 4.1c) diambil nilai rata-ratanya : Misal :
Data 1 pada Tabel 4.1c data pengereman dinamis pada posisi sikat -100
Ia,rem
̅̅̅̅̅̅ = Ia,rem +Ia,rem +Ia,rem = , + , + , = , = 2,34 A
ω̅ = rp
x π rad/sec
= x π = 146,533 rad/sec
maka, Trem = E
a x Ia,rem ω
= , x ,
, = 1,07 N-m
Cara perhitungan yang sama dilakukan untuk data yang lain sehingga didapatkan hasilnya sebagai berikut :
Tabel 4.2c Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat -100
Rp ( Ohm ) Ia,rem (Amp) t(detik) Trem (N-m)
20 2,34 6,859 1,07
30 1,47 7,366 0,67
40 1,17 8,890 0,53
50 1.02 10,244 0,46
60 0,87 11,372 0,39
4. Posisi Sikat 00
Dari data-data sebelum pengereman diperoleh : IL = If + Ia = 0,05 + 2,12 = 2,17 A
Dari hasil pengujian (Tabel 4.1d) diambil nilai rata-ratanya : Misal :
Data 1 pada Tabel 4.1d data pengereman dinamis pada posisi sikat 00
Ia,rem
̅̅̅̅̅̅ = Ia,rem +Ia,rem +Ia,rem = , + , + , = , = 1,62 A
t̅ = t + t + t = , + , + , = , = 7,591 detik
ω̅ = rp
x π rad/sec
= x π = 146,533 rad/sec
maka, Trem = E
a x Ia,rem ω
= , x ,
, = 0,59 N-m
Cara perhitungan yang sama dilakukan untuk data yang lain sehingga didapatkan hasilnya sebagai berikut :
Tabel 4.2d Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat 00
Rp ( Ohm ) Ia,rem (Amp) t(detik) Trem (N-m)
20 1,62 7,591 0,59
30 1,40 8,178 0,51
40 1,00 8,318 0,36
50 0,86 9,803 0,31
5. Posisi Sikat 200
Dari data-data sebelum pengereman diperoleh : IL = If + Ia = 0,05 + 8,56 = 8,61 A
Ea = Vt– (Ia x Ra) Ea = 60 – (8,61 x 3,8) Ea = 27,282 Volt
Dari hasil pengujian (Tabel 4.1e) diambil nilai rata-ratanya : Misal :
Data 1 pada Tabel 4.1e data pengereman dinamis pada posisi sikat 200
Ia,rem
̅̅̅̅̅̅ = Ia,rem +Ia,rem +Ia,rem = , + , + , = , = 1,52 A
t̅ = t + t + t = , + , + , = , = 9,902 detik
ω̅ = rp
x π rad/sec
= x π = 146,533 rad/sec
maka, Trem =
Ea x Ia,rem ω
= , x ,
, = 0,28 N-m
Tabel 4.2e Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat 200
Rp ( Ohm ) Ia,rem (Amp) t(detik) Trem (N-m)
20 1,52 9,902 0,28
30 1,15 10,350 0,21
40 0,95 10,555 0,17
50 0,74 11,082 0,13
60 0,61 12,256 0,11
6. Posisi Sikat 300
Dari data-data sebelum pengereman diperoleh : IL = If + Ia = 0,04 + 5,19 = 5,23 A
Ea = Vt– (Ia x Ra) Ea = 42 – (5,19 x 3,8) Ea = 22,278 Volt
Dari hasil pengujian (Tabel 4.1f) diambil nilai rata-ratanya : Misal :
Data 1 pada Tabel 4.1f data pengereman dinamis pada posisi sikat 300
Ia,rem
̅̅̅̅̅̅ = Ia,rem +Ia,rem +Ia,rem = , + , + , = , = 1,01 A
t̅ = t + t + t = , + , + , = , = 15,128 detik
ω̅ = rp
x π rad/sec
maka, Trem = E
Tabel 4.2f Hasil Perhitungan Pengereman Dinamis Pada Posisi Sikat 300
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari pembahasan yang dilakukan, maka diperoleh kesimpulan sebagai berikut:
1. Pada pengereman dinamis motor arus searah penguatan shunt, besar tahanan pengereman sebanding dengan lama waktu pengereman.
2. Semakin besar arus pengereman maka waktu pengereman akan semakin cepat.
3. Untuk besar tahanan yang sama pada pengereman dinamis motor arus searah penguatan shunt, waktu pengereman tercepat berada pada posisi sikat -300 yaitu sebesar 2,770 detik.
5.2 Saran
Beberapa saran yang bisa diberikan dari hasil tugas akhir ini adalah : 1. Pada pengujian selanjutnya disarankan supaya lebih teliti lagi dalam
pencatatan waktu pengereman agar data yang didapatkan lebih valid. 2. Pada pengujian selanjutnya bisa dilakukan untuk jenis motor dan dengan
DAFTAR PUSTAKA
1. Wijaya, Mochtar, “Dasar-dasar Mesin Listrik”, Penerbit Djambatan, 2001.
2. Theraja B.L., “A Text Book of Electrical Technology”, Nurja Construction & Development, New Delhi, 1980.
3. Mehta V.K dan Rohit., “ Principles of Elektrical Mechines”, S.Chand dan Company LTD, Ram Nagar New Delhi, 2002.
4. Kadir Abdul., “Mesin Arus Searah”, Djambatan, Jakarta, 1980.
5. Deshpande M.V, “Electric Motors Applications And Control”, A.H.Wheeler & C.O. Private Limited, Bombay,1985.
6. Sitinjak, R.E. 2008. Perbandingan Pengereman Motor DC Penguatan Seri Dengan Metode Dinamis dan Plugging, (Skripsi). Fakultas Teknik, Universitas Sumatera Utara.
7. Siahaan, R. 2012. Studi Pengaruh Perubahan Posisi Sikat Terhadap Efisiensi Motor DC Shunt, (Skripsi). Fakultas Teknik, Univesitas Sumatera Utara.
8. Purba, Richard N. 2010. Analisa Perbandingan Pengaruh Tahanan Pengereman Dinamis Terhadap Waktu Antara Motor Arus Searah
Penguatan Kompon Panjang Dengan Penguatan Kompon Pendek, (Skripsi). Fakultas Teknik, Universitas Sumatera Utara.
9. Stephanus A. Ananda, dkk. September 2003. “Studi Karakteristik Motor DC Penguat Luar Terhadap Posisi Sikat”. Jurnal Teknik Elektro. Volume