MODEL KESALAHAN PENGUKURAN PADA REGRESI
TERBOBOTI GEOGRAFIS DAN PENERAPANNYA PADA
KASUS GIZI BURUK DI JAWA TIMUR
IDA MARIATI HUTABARAT
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
Dengan ini saya menyatakaan bahwa disertasi berjudul Model Kesalahan Pengukuran pada Regresi Terboboti Geografis dan Penerapannya pada Kasus Gizi Buruk di Jawa Timur adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir disertasi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Maret 2014
Ida Mariati Hutabarat
RINGKASAN
IDA MARIATI HUTABARAT. Model Kesalahan Pengukuran pada Regresi Terboboti Geografis dan Penerapannya pada Kasus Gizi Buruk Di Jawa Timur. Dibimbing Oleh ASEP SAEFUDDIN, HARDINSYAH, ANIK DJURAIDAH dan I WAYAN MANGKU.
Kesalahan pengukuran adalah kesalahan yang muncul manakala suatu nilai dicatat tidak persis sama dengan nilai sebenarnya dalam kaitan dengan suatu proses pengukuran. Kesalahan pengukuran dapat terjadi dari pengaruh desain kuesioner, metode pengumpulan data, pewawancara dan responden. Dampak dari kesalahan pengukuran adalah model yang dibangun tidak tepat atau tidak mewakili populasi, penduga parameter menjadi bias dan tidak konsisten serta menyebabkan penarikan kesimpulan yang salah
Tujuan utama penelitian ini adalah membentuk model regresi terboboti geografis (RTG) dengan kesalahan pengukuran di kovariat yang diterapkan pada data gizi buruk balita di Jawa Timur. Tujuan khusus penelitian ini, yaitu (1) menentukan penduga parameter (pengaruh tetap), (pengaruh acak) dan (komponen ragam) pada model RTG dengan kesalahan pengukuran dari model dan (2) mengkaji sifat-sifat asimtotik dari penduga parameter yang dihasilkan pada tujuan pertama, (3) mengaplikasikan model yang diperoleh dari tujuan pertama terhadap data gizi buruk di Provinsi Jawa Timur, dan (4) membandingkan model RTG dengan mengabaikan kesalahan pengukuran dan model dengan kesalahan pengukuran.
Metode yang digunakan untuk menduga parameter dan adalah kemungkinan maksimum berkendala (restricted maximum likelihood/REML). Perangkat lunak yang digunakan untuk pendugaan model regresi adalah R.3.0.2. Data yang digunakan dalam penelitian ini merupakan data sekunder yang berasal dari data Susenas 2010 pada 38 kabupaten/kota di Jawa Timur. Peubah respon yang digunakan adalah persentase balita penderita gizi buruk pada tiap kabupaten/kota di Jawa Timur, dan sebagai kovariat adalah persentase penduduk miskin. Indikator kebaikan model ditentukan dari nilai-nilai KTG, R2, dan AIC.
Hasil analisis diperoleh bahwa penduga parameter model RTG dengan kesalahan pengukuran untuk penduga pengaruh tetap adalah , penduga untuk pengaruh acak adalah dan penduga untuk komponen ragam adalah Sifat-sifat asimtotik penduga , dan model RTG dengan peubah penjelas mengandung kesalahan pengukuran adalah menyebar normal secara asimtotik, dan , , berturut-turut adalah penduga yang konsisten bagi , , .
balita gizi buruk diperoleh bahwa wilayah yang saling berdekatan cenderung membentuk satu kelompok. Dapat disimpulkan bahwa pendertita gizi buruk di Jawa Timur dipengaruhi oleh aspek kewilayahan (spasial).
SUMMARY
IDA MARIATI HUTABARAT. Measurement Error Models in Geographical Weighted Regression and Its Application on cases of Malnutrition at East Java. Supervised by ASEP SAEFUDDIN, HARDINSYAH, ANIK DJURAIDAH and I WAYAN MANGKU.
Measurement error is an error that appears when a value be recorded is not exactly equal to the true value in terms of a measurement process. Measurement errors can occur from the effects of questionnaire design, data collection methods, the interviewer and the respondent. The impact of measurement error are a model built is inaccurate or not representative of the population, parameter estimator becomes biased and inconsistent, and causing incorrect inferences.
The main purpose of this study is to form Geographically Weighted Regression (GWR) model with measurement error in explanatory variables were applied to the data of malnutrition in toddlers in East Java. The specific purpose of this study are : 1) to find parameter estimator (fixed effect) (random effect) and (variance component) on GWR model with measurement error of model and , 2) examine the asymptotic properties of the parameter estimators produced on purpose 1, 3) applying the model obtained from objective 1 to the malnutrition data in East Java Province, and 4) to compare the GWR model with measurement error and GWR model without measurement error.
Methods used for estimating the parameter and is the restricted maximum likelihood (REML). The analytical tool used to determine the weighting matrix and the regression model is R.3.0.2 software. The data used in this study is a secondary data taken from Susenas 2010 in 38 districts / cities in East Java. Response variable used was the percentage of severely malnourished toddlers in each district / city in East Java, and as covariate is the percentage of poor. Indicator of the goodness of the model is determined by the MSE, R2, and AICvalues.
The results of this study are the parameter estimator of GWR model with measurement error to estimate the fixed effect is , the estimator for random effect is and the estimator for variance component is
.
The asymptotic properties of estimator , and from GWR model with measurement error in explanatory variable is asymptotically normaly distributed and , , , respectively, is consistent estimator for , ,
toddlers obtained that adjacent regions tend to form a group. It can be concluded that malnutrition in East Java is influenced by aspects of territorial (spatial). Keywords: measurement error, geographically weighted regression model, the
© Hak Cipta Milik IPB, Tahun 2014
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Disertasi
sebagai salah satu syarat untuk memperoleh gelar Doktor
pada
Program Studi Statistika
MODEL KESALAHAN PENGUKURAN PADA REGRESI
TERBOBOTI GEOGRAFIS DAN PENERAPANNYA PADA
KASUS GIZI BURUK DI JAWA TIMUR
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
BOGOR 2014
Penguji pada Ujian Tertutup : Dr Ir Aji Hamim Wigena, M.Sc Dr Ir Kusman Sadik, M.Si
Judul Disertasi : Model Kesalahan Pengukuran pada Regresi Terboboti Geografis dan Penerapannya pada Kasus Gizi Buruk di Jawa Timur
Nama : Ida Mariati Hutabarat NIM : G161090041
Disetujui oleh Komisi Pembimbing
Prof Dr Ir Asep Saefuddin, MSc Ketua
Prof Dr Ir Hardinsyah, MS Anggota
Dr Ir Anik Djuraidah, MS Anggota
Prof Dr Ir I Wayan Mangku, MSc Anggota
Diketahui oleh
Ketua Program Studi Statistika
Dr Ir I Made Sumertajaya, MSi
Dekan Sekolah Pascasarjana
Dr Ir Dahrul Syah, MScAgr
PRAKATA
Puji dan syukur penulis ucapkan kepada Allah Bapa di surga, karena kasih karunia-Nya penulis dapat menyelesaikan penelitian yang berjudul “Model Kesalahan Pengukuran pada Regresi Terboboti Geografis dan Penerapannya pada Kasus Gizi Buruk di Jawa Timur” dengan baik.
Pada kesempatan ini penulis mengucapkan terima kasih dengan penuh rasa hormat kepada komisi pembimbing : Prof Dr Ir Asep Saefuddin, MSc, Prof Dr Ir Hardinsyah, MS, Dr Ir Anik Djuraidah, MS, serta Prof Dr Ir I Wayan Mangku, MSc, yang telah memberikan saran, arahan, kesabaran, pengertian dalam membimbing penulis sampai selesainya karya ilmiah ini.
Ucapan terima kasih penulis haturkan kepada bapak dan ibu dosen statistika yang telah memberikan ilmu, bimbingan dan arahan selama mengikuti perkuliahan, serta staf administrasi departemen statistika dan pascasarjana IPB yang telah membantu kelancaran dalam penyelesaian disertasi.
Penulis menghanturkan terima kasih kepada Dr Ir I Made Sumertajaya, MSi selaku Ketua Program Studi S3 Statistika, Dr Anang Kurnia,SSi, MSi selaku Ketua Departemen Statistika yang menjadi pimpinan sidang tertutup, Dr Ir Sri Nurdiati,MSc selaku Dekan FMIPA yang menjadi pimpinan sidang terbuka, Prof Dr Ir Marimin,MSc selaku Sekretaris Program Doktor, Dr Ir Aji Hamim Wigena, M.Sc dan Dr Ir Kusman Sadik, M.Si sebagai penguji pada sidang tertutup, serta Prof Dr Budi Nurani R, MS dan Dr Ir Muhammad Nur Aidi, MS sebagai penguji pada sidang terbuka.
Penulis juga menghanturkan terima kasih kepada pimpinan di Universitas Cenderawasih Papua atas kesempatan yang diberikan kepada penulis untuk melanjutkan studi, kepada pimpinan Institut Pertanian Bogor yang telah memberikan kesempatan untuk studi di program studi statistika IPB, serta terima kasih kepada Direktorat Jenderal Pendidikan Tinggi Kementrian Pendidikan dan Kebudayaan, atas Beasiswa Program Pascasarjana (BPPS) melalui Sekolah Pascasarjana IPB.
Penulis Ungkapan terima kasih yang tulus juga penulis sampaikan kepada segenap keluarga terutama kedua orang tua (P. Hutabarat,T.Simanjuntak), mertua (A. Siahaan (alm), P. Manurung), suami tercinta (Simon Siahaan (alm),dan anak-anakku tersayang (Dessy, Fajar dan Hasian), serta seluruh keluarga besar Siahaan dan Hutabarat atas perhatian, doa, dukungan dan kasih sayangnya.
Terima kasih juga kepada teman-teman S2 Statistika dan S2 Terapan, Mahasiswa S3 atas diskusi, motivasi, bantuan dan kebersamaannya (khususnya Budi Santoso, MSi yang selalu siap membantu dalam membuat peta tematik).
Penulis menyadari bahwa masih ada kekurangan dalam penyusunan karya ilmiah ini. Penulis mengharapkan kritik dan saran yang membangun untuk perbaikan karya ilmiah penulis selanjutnya. Harapan penulis semoga karya ilmiah ini bermanfaat untuk banyak pihak yang terkait.
Bogor, Maret 2014
DAFTAR ISI
PADA KASUS GIZI BURUK DI PROVINSI JAWA TIMUR 45
Data dan Metode 46
Hasil dan Pembahasan 47
Lebar Jendela dan Matriks Pembobot 49
Eksplorasi Data Spasial 51
Model Regresi dan Model Kesalahan Pengukuran Kejadian Balita Gizi
DAFTAR TABEL
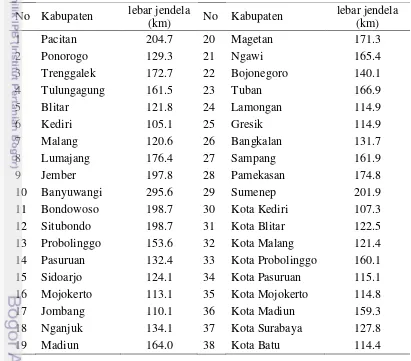
Tabel 4.1. Nilai lebar jendela (bandwidth) optimum untuk setiap kabupaten/kota
50
Tabel 4.2. Perbandingan dugaan RTG 51
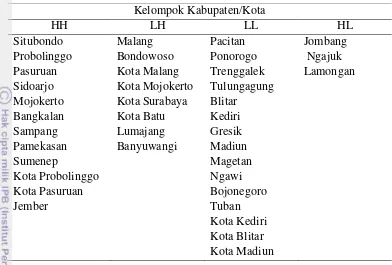
Tabel 4.3. Pengelompokkan kemiripan kabupaten di Jawa Timur berdasarkan peubah balita penderita gizi buruk
54
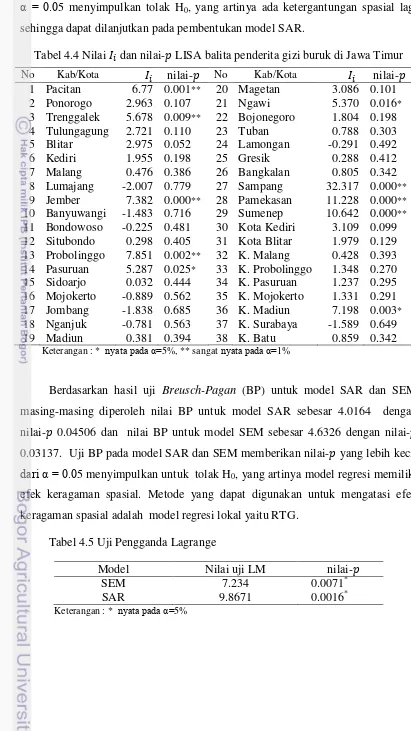
Tabel 4.4. Nilai dan nilai- LISA balita penderita gizi buruk di
Jawa Timur 55
Tabel 4.5. Uji pengganda Lagrange 55
Tabel 4.6. Pendugaan parameter model regresi dengan kesalahan
pengukuran 56
Tabel 4.7. Analisis ragam model regresi dengan kesalahan
pengukuran 56
Tabel 4.6. Perbandingan model linear tanpa dan dengan kesalahan
pengukuran 56
Tabel 4.8. Perbandingan model linear dan model kesalahan pengukuran
58 Tabel 4.9. Ringkasan statistik parameter model RTG dengan
pembobot fungsi kernel adaptif kuadrat ganda 59 Tabel 4.10. Ringkasan statistik parameter model RTG dengan
kesalahan pengukuran dengan pembobot fungsi kernel
DAFTAR GAMBAR
Gambar 2.1. Otokorelasi spasial 13
Gambar 2.2. Plot pencaran Moran 16
Gambar 2.3. Ilustrasi lebar jendela kernel tetap 29 Gambar 2.4. Ilustrasi lebar jendela kernel adaptif 29
Gambar 2.5. Alur kerangka pemikiran disertasi 33
Gambar 4.1. Peta administratif wilayah kabupaten/kota di Jawa
Timur 48
Gambar 4.2. Persebaran persentase balita penderita gizi buruk di
Jawa Timur 48
Gambar 4.3. Persebaran persentase penduduk miskin di Jawa
Timur 49
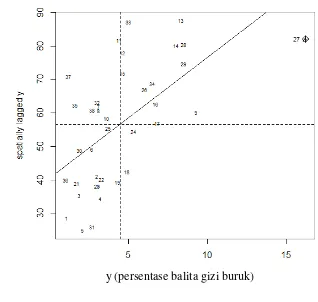
Gambar 4.4. Plot pencaran Moran balita penderita gizi buruk di
Jawa Timur 53
Gambar 4.5. Kemiripan daerah untuk peubah balita penderita gizi buruk di Jawa Timur berdasarkan plot pencaran
Moran 53
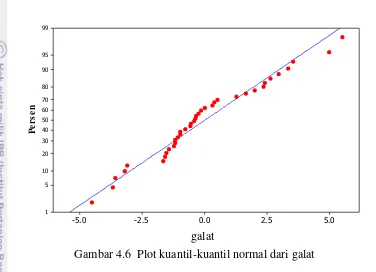
Gambar 4.6. Plot kuantil-kuantil normal dari galat 57
Gambar 4.7. Plot antara dugaan dengan galat 58
Gambar 4.8. Plot model RTG dan RTG dengan kesalahan
pengukuran 60
Gambar 4.9. Plot model RTG dan RTG dengan kesalahan
pengukuran 60
Gambar 4.10. Pengelompokkan parameter model RTG yang berpengaruh signifikan terhadap kejadian balita gizi
buruk 61
Gambar 4.11. Pengelompokkan parameter model RTG dengan kesalahan pengukuran yang berpengaruh signifikan
terhadap kejadian balita gizi buruk 61
Gambar 4.12. Plot komponen ragam galat model RTG dan
RTG dengan kesalahan pengukuran 62
Gambar 4.14. Plot nilai Akaike’s Information Criterion (AIC)
DAFTAR LAMPIRAN
Lampiran 1. Data persentase penderita gizi buruk, persentase
rumah tangga miskin (observed) dan dugaannya 72 Lampiran 2. Koordinat lintang dan bujur tiap kabupaten /kota di
Provinsi Jawa Timur 73
Lampiran 3. Matriks jarak antar kabupaten/kota di Provinsi Jawa
Timur (dalam kilometer) 74
Lampiran 4.. Matriks pembobot untuk setiap kabupaten/kota di
Provinsi Jawa Timur 81
Lampiran 5. Penduga parameter model RTG 88
Lampiran 6. Penduga parameter model RTG dengan kesalahan
pengukuran 89
Lampiran 7. Penduga ragam sisaan , R-Square dan
AIC dari model RTG 90
Lampiran 8. Penduga ragam sisaan , R-Square dan
AIC dari model RTG dengan kesalahan pengukuran 91
Lampiran 9. Sintaks program R 3.0.2 92
Lampiran 10. Penurunan rumus 96
1 PENDAHULUAN
Latar Belakang
Kesalahan pengukuran adalah kesalahan yang muncul ketika suatu nilai dicatat tidak persis sama dengan nilai sebenarnya dalam kaitan dengan suatu proses pengukuran. Nilai sebenarnya dari kovariat diwakilkan oleh suatu nilai yang didapat melalui suatu proses pengukuran yang belum tentu sesuai dengan nilai sebenarnya. Sebagai contoh di dalam aplikasi ekonomi yang berkaitan dengan masalah pendapatan. Jika responden yang diwawancara tidak bisa menyebutkan pendapatannya secara tepat, maka hasil catatan penelitian akan lebih tinggi atau lebih rendah dari nilai yang sebenarnya (Lee 2009). Dalam bidang kedokteran, misalnya dalam mengukur tekanan darah sistolik (systolic blood pressure/SBP), yang dikenal memiliki variasi harian dan musiman yang kuat. Ketika mengukur SBP, berbagai sumber kesalahan dapat terjadi seperti kesalahan alat rekaman dan kesalahan administrasi (Carroll et al. 2006).
Kasus lain bisa dijumpai di dalam studi gizi (Prentice & Sheppard 1995), kesalahan pengukuran timbul akibat ketidaktepatan dalam mengukur asupan gizi, seperti asupan lemak yang menggunakan instrumen konvensional yaitu dengan mengingat kembali makanan yang dimakannya selama 24 jam. Selain itu dalam studi kesehatan lingkungan yaitu dalam mengukur tingkat polusi udara, misalnya,
particulate matter (PM) atau ozon (O3). Daerah yang sulit untuk diukur tingkat
polusi udaranya sering dihampiri dengan menggunakan jarak dari situs tercemar atau dengan menggunakan ukuran di beberapa situs pemantauan (Carroll et al. 1997).
yang dibangun tidak tepat atau tidak mewakili populasi. Kehadiran kesalahan pengukuran menyebabkan penduga parameter menjadi bias dan tidak konsisten serta menyebabkan penarikan kesimpulan yang salah (Chen et al. 2011 ). Dalam mengatasi masalah tersebut maka digunakan model kesalahan pengukuran
(measurement error models).
Peubah dalam model kesalahan pengukuran ada tiga, yaitu peubah yang menyatakan data hasil pengamatan yang diperoleh dari proses pengukuran, peubah yang menyatakan data sesungguhnya yang tidak diketahui, dan peubah kesalahan pengukuran. Secara matematis untuk regresi sederhana modelnya dapat dituliskan sebagai berikut:
(1.1) dengan adalah peubah yang menyatakan hasil pengamatan yang disebut dengan peubah pengganti (surrogate), adalah peubah yang tidak teramati (latent variable), dan adalah kesalahan pengukuran yang diasumsikan menyebar normal dengan nilai harapan 0 dan ragam .
Pendekatan yang digunakan untuk menduga kurva regresi berdasarkan model regresi (1.1), yaitu pendekatan parametrik dan nonparametrik. Pendekatan parametrik merupakan pendekatan yang sering digunakan untuk menduga kurva regresi. Namun pendekatan parametrik memiliki keterbatasan untuk menduga pergerakan data yang tidak diharapkan. Jika salah satu asumsi dari pendekatan parametrik tidak dipenuhi, maka kurva regresi dapat diduga dengan menggunakan metode regresi nonparametrik.
Penelitian yang berkaitan dengan model regresi parametrik dengan adanya kesalahan pengukuran telah banyak dibahas, di antaranya Carroll et al. (1996) dan Fuller & Hidiroglou (1978). Kesalahan pengukuran akan berpengaruh terhadap koefisien regresi. Dalam regresi sederhana, besaran koefisien regresi lebih besar dibandingkan bila dihitung tanpa menggunakan model kesalahan pengukuran. Hal ini disebabkan oleh adanya faktor koreksi dari ragam kesalahan.
(1999) telah melakukan penelitian untuk menduga parameter pada model kesalahan pengukuran dengan metode spline dimodifikasi. Hasil yang diperoleh adalah fungsi W (nilai pengamatan) berkorelasi tinggi dan fungsi dugaannya tidak stabil.
Beberapa penelitian yang telah dilakukan pada model regresi nonlinear dengan kesalahan pengukuran antara lain : Stefanski & Carroll (1985) pada model regresi logistik tentang perkembangan penyakit jantung. Dalam penelitiannya mereka memperkenalkan sebuah penduga bias-adjusted. Stefanski (1988) melakukan penelitian pada model linear terampat (GLM). Hasil dari metode komputasi yang ditawarkan adalah plot informatif, disebut measurement error trace yang menggambarkan grafik pengaruh kesalahan pengukuran dari parameter yang diduga. Nakamura (1992) menduga parameter pada model Hazard proportional.
Menurut Li et al. (2009) data spasial rentan terhadap kesalahan pengukuran pada kovariat, sehingga penelitian untuk model regresi spasial dengan kesalahan pengukuran mulai berkembang, karena dalam penerapannya terdapat peubah yang tidak dapat diukur secara langsung atau tidak dapat diukur secara tepat sesuai dengan nilai sebenarnya serta berpengaruh secara spasial. Dalam penelitian model spasial linear campuran, Li et al. (2009) menggunakan model conditional auto-regressive (CAR). Hasil penelitiannya menyatakan bahwa penduga naïve
dari koefisien regresi menurun dan komponen ragam meningkat jika kesalahan pengukuran diabaikan.
Berbagai cara untuk menganalisis data spasial, selain CAR, salah satu metode untuk menganalisisnya adalah model regresi terboboti geografis/RTG (geographically weighted regression) (Fotheringham et al. 2002). RTG merupakan pengembangan dari model regresi linear klasik. Pada model regresi linear hanya dihasilkan penduga parameter yang berlaku secara global, sedangkan dalam model RTG dihasilkan penduga parameter model yang bersifat lokal untuk setiap lokasi pengamatan.
(2009) untuk model CAR, matriks pembobot spasial yang digunakan merupakan matriks ketergantungan spasial (contiguity), yang menggambarkan kedekatan suatu daerah berdasarkan ketergantungan spasial biner. Pada matriks contiguity, nilai 1 menunjukkan daerah yang bertetanggaan satu sama lain dan nilai 0 tidak bertetangga. Berbeda dengan CAR, pada model RTG matriks pembobot yang digunakan adalah matriks pembobot yang besarnya tergantung pada kedekatan antar lokasi pengamatan. Jika semakin dekat suatu lokasi, maka bobot pengaruhnya akan semakin besar.
Aplikasi dalam bidang kesehatan, kovariat sering sulit diukur secara langsung atau tidak dapat diukur secara tepat sesuai dengan nilai sebenarnya. Kovariat sering dikumpulkan dari sampel survei kecil di masing-masing wilayah dan rata-rata sampel digunakan sebagai penduga untuk nilai agregat populasi yang sebenarnya, seperti persentase perokok di dalam satu kabupaten (Xia & Carlin 1998). Demikian juga dengan Survei Sosial Ekonomi Nasional (SUSENAS) yang dilaksanakan setiap tahun oleh Badan Pusat Statistik (BPS). Susenas dirancang untuk memenuhi kebutuhan data yang berkaitan dengan kualitas sumber daya manusia, khususnya yang berhubungan dengan karakteristik sosial ekonomi. Pengumpulan data dari sampel rumah tangga yang terpilih dilakukan melalui wawancara tatap muka antara petugas survei (pencacah) dengan responden. Data yang dikumpulkan antara lain menyangkut aspek pengeluaran rumah tangga.
Salah satu dampak dari kemiskinan yang terjadi di Indonesia adalah kesehatan dan kekurangan nutrisi. Asupan zat gizi dari konsumsi makanan yang direpresentasikan melalui pengeluaran konsumsi rumah tangga merupakan salah satu faktor yang mempengaruhi status gizi. Kejadian gizi buruk pada suatu wilayah diduga berkaitan dengan lingkungan sekitarnya. Kondisi geografis, sosial budaya, dan ekonomi akan berbeda antara wilayah yang satu dengan wilayah yang lain. Faktor geografis merupakan salah satu penyebab kesenjangan status gizi antar wilayah. Faktor geografis berpengaruh pada mobilitas penduduk dan akses masyarakat terhadap pangan, pelayanan gizi dan kesehatan primer maupun rujukan. Dengan demikian penderita gizi buruk merupakan peubah yang memiliki efek spasial.
Berdasarkan uraian di atas, maka kovariat persentase penduduk miskin yang mempengaruhi status gizi memiliki efek spasial dan mengalami kesalahan pengukuran. Metode pemodelan statistik dengan memperhitungkan faktor spasial bila terjadi kesalahan pengukuran di dalam kovariat diperlukan. Metode RTG dengan kesalahan pengukuran diharapkan mampu menghasilkan model yang spesifik di tiap wilayah sehingga semakin informatif dan aplikatif.
Berdasarkan perkembangan penelitian yang telah diuraikan di atas, maka hal yang menjadi perhatian peneliti adalah bagaimana penduga parameter model kesalahan pengukuran pada RTG, sifat-sifat asimtotik dari penduga dan bagaimana penerapannya pada kasus gizi buruk di Jawa Timur.
Tujuan Penelitian
Berdasarkan permasalahan di atas, maka tujuan dari penelitian ini adalah : 1. Menentukan penduga parameter pada model RTG dengan kesalahan
pengukuran.
2. Mengkaji sifat-sifat asimtotik dari penduga parameter yang dihasilkan.
3. Mengaplikasikan model yang diperoleh dari tujuan 1 pada kasus gizi buruk di Provinsi Jawa Timur.
Kebaruan (Novelty)
Model kesalahan pengukuran yang telah dilakukan selama ini berkaitan dengan model regresi parametrik, nonparametrik, dan model spasial linear. Berbeda dengan penelitian yang dilakukan Li et al. (2009) yang menggunakan model CAR untuk pengaruh ketergantungan spasial, penelitian ini mengkaji pendugaan parameter model RTG untuk pengaruh keragaman spasial.
Sistematika Penulisan Disertasi
Secara keseluruhan disertasi ini dirancang menjadi enam bab. Pendahuluan disajikan dalam Bab 1. Pada Bab 2 berisi tinjauan ulang mengenai analisis regresi, regresi dengan kesalahan pengukuran dan regresi terboboti geografis beserta pendugaan parameternya.
Salah satu dari model statistika yang sering digunakan dalam pemecahan suatu permasalahan adalah model regresi linear. Model regresi linear merupakan sebuah model yang digunakan untuk menganalisis hubungan antar peubah. Hubungan tersebut dapat diekspresikan dalam bentuk persamaan yang menghubungan peubah respon (Y) dengan satu atau lebih kovariat (X).
Jika peubah X tidak dapat diamati secara langsung atau tidak dapat diukur langsung (diukur tanpa kesalahan) maka akan timbul masalah kesalahan pengukuran. Kehadiran kesalahan pengukuran menyebabkan penduga parameter menjadi bias dan tidak konsisten serta menyebabkan penarikan kesimpulan yang salah. Dalam mengatasi masalah tersebut maka digunakan model kesalahan pengukuran.
suatu model regresi yang memasukkan hubungan spasial antar lokasi ke dalam model, sehingga model yang digunakan salah satunya adalah model RTG.
2 TINJAUAN PUSTAKA
Model Regresi Linear
Salah satu dari model statistika yang sering digunakan dalam pemecahan suatu permasalahan adalah model regresi linear. Model regresi linear merupakan sebuah model yang digunakan untuk menganalisis hubungan antar peubah. Hubungan tersebut dapat diekspresikan dalam bentuk persamaan yang menghubungan peubah respon (Y) dengan satu atau lebih kovariat (X). Jika peubah respon hanya dihubungkan dengan satu kovariat, maka akan menghasilkan persamaan regresi linear sederhana, sedangkan jika kovariat yang digunakan lebih dari satu, maka akan menghasilkan persamaan regresi linear berganda.
Model regresi linear secara umum diformulasikan dalam bentuk matriks sebagai berikut (Draper dan Smith 1998):
, ) (2.1)
dengan
= vektor peubah respon berukuran = matriks rancangan berukuran = vektor parameter berukuran = vektor galat acak berukuran
Pendugaan parameter model regresi menggunakan metode kuadrat terkecil (MKT). Metode MKT digunakan dengan tujuan meminimumkan jumlah kuadrat galat. Pendugaan parameter model didapat dari persamaan sebagai berikut (Draper & Smith 1998).
.
Model Regresi Linear dengan Kesalahan Pengukuran
Perbedaan antara model regresi linear dan model regresi linear dengan kesalahan pengukuran terletak pada kovariat. Dalam model kesalahan pengukuran, kovariat tidak diketahui atau merupakan peubah acak yang memiliki sebaran tertentu sedangkan dalam regresi linear kovariat dianggap tetap atau tidak memiliki sebaran tertentu. Perbedaan antara kedua model tersebut juga ditunjukkan dalam pendugaan parameter serta dalam penggunaan asumsi.
Bentuk model regresi linear sederhana ditulis sebagai berikut:
, ). (2.2)
Jika peubah tidak dapat diamati secara langsung atau tidak dapat diukur secara tepat, maka regresinya disebut sebagai regresi dengan kesalahan pengukuran. Sebagai pengganti maka diamatilah sebuah peubah Z. Dalam hal ini, telah terjadi kesalahan pengukuran terhadap . Kesalahan pengukuran inilah yang disebut sebagai galat pada peubah Model kesalahan pengukurannya adalah:
, ). (2.3)
Dari persamaan (2.2) dan (2.3) model regresinya menjadi
(2.4) Pada model (2.4) terlihat bahwa model kesalahan pengukuran memiliki bentuk yang serupa dengan model regresi klasik. Asumsi yang digunakan adalah:
dengan, artinya “menyebar normal dan saling bebas” dan
adalah matriks diagonal dengan elemen yang diberikan pada diagonal matriks tersebut, serta diasumsikan diketahui (Fuller 1987). Nilai harapan adalah:
, karena , maka atau
Nilai harapan dari persamaan (2.3) adalah
atau
. (2.6)
Sehingga vektor rata-rata dari peubah acak dan adalah
Kemudian ragam Y, ragam Z, dan peragam (Z,Y) dapat ditentukan sebagai berikut:
atau
dan
atau
dan peragam (Y,Z) adalah
karena dan saling bebas maka , sehingga
.
Dengan demikian, matriks peragam dari peubah acak Y dan peubah acak Z
adalah
Pendugaan parameter regresi menggunakan metode momen, dengan cara mengganti momen populasi yang tidak diketahui pada ruas kiri persamaan (2.7) dengan penduga contohnya untuk mendapatkan sistem persamaan dalam parameter yang tidak diketahui (Fuller 1987).
Dengan menggantikan momen populasi dari persamaan (2.7) dengan momen contoh, diperoleh:
i)
, sehingga
ii)
sehingga (2.8) iii)
atau
sehingga
Dengan mensubsitusi persamaan (2.6) ke persamaan (2.5), maka nilai harapan dari peubah adalah:
(2.9) Selanjutnya dapat dilakukan pendugaan nilai Xi berdasarkan nilai Zi.
Misalkan asumsi dari galat pada model persamaan untuk satu peubah terpenuhi maka, persamaan dapat ditulis:
(2.10)
Persamaan (2.10) disajikan dalam bentuk model regresi linear klasik, dimana adalah peubah yang belum diketahui yang akan diduga. Dengan demikian, penduga tak bias linear terbaik bagi diberikan dengan generalisasi penduga kuadrat terkecil. Hasil akhir pendugaan diperoleh nilai sebagai berikut:
(2.11)
Dengan , matriks peragam dari ,
(Fuller 1987).
Eksplorasi Data Spasial
Eksplorasi data spasial fokus pada pengenalan karakteristik dari data geografis dan lebih spesifik lagi pada otokorelasi spasial (spatial autocorrelation) dan keragaman spasial (spatial heterogeneity) (Anselin 1995). Anselin (1995) menyampaikan bahwa eksplorasi data spasial merupakan suatu kumpulan teknik untuk menggambarkan dan memvisualisasikan sebaran spasial, mengindentifikasi lokasi yang sejenis atau pencilan spasial, menentukan pola dari hubungan spasial (spatial association), berkelompok atau hotspot dan menduga pola lain dari keragaman spasial.
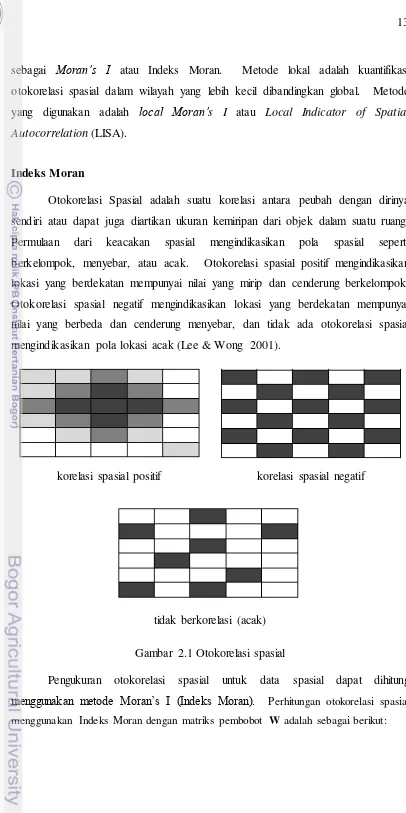
sebagai Moran’s I atau Indeks Moran. Metode lokal adalah kuantifikasi otokorelasi spasial dalam wilayah yang lebih kecil dibandingkan global. Metode yang digunakan adalah local Moran’s I atau Local Indicator of Spatial Autocorrelation (LISA).
Indeks Moran
Otokorelasi Spasial adalah suatu korelasi antara peubah dengan dirinya sendiri atau dapat juga diartikan ukuran kemiripan dari objek dalam suatu ruang. Permulaan dari keacakan spasial mengindikasikan pola spasial seperti berkelompok, menyebar, atau acak. Otokorelasi spasial positif mengindikasikan lokasi yang berdekatan mempunyai nilai yang mirip dan cenderung berkelompok. Otokorelasi spasial negatif mengindikasikan lokasi yang berdekatan mempunyai nilai yang berbeda dan cenderung menyebar, dan tidak ada otokorelasi spasial mengindikasikan pola lokasi acak (Lee & Wong 2001).
korelasi spasial positif korelasi spasial negatif
tidak berkorelasi (acak)
Gambar 2.1 Otokorelasi spasial
Pengukuran otokorelasi spasial untuk data spasial dapat dihitung
menggunakan metode Moran’s I (Indeks Moran). Perhitungan otokorelasi spasial
(2.12)
dengan = indeks Moran
= nilai peubah pada lokasi ke- = nilai peubah pada lokasi ke- = rata-rata dari peubah
= elemen dari matriks pembobot antara lokasi- dan lokasi- = banyaknya lokasi
(Lee & Wong 2001).
Nilai yang dihasilkan dalam perhitungan Indeks Moran berkisar antara -1 sampai 1. Nilai indeks moran nol mengindikasikan tidak berkelompok (acak), indeks moran bernilai positif mengindikasikan otokorelasi spasial yang positif yang berarti lokasi yang berdekatan mempunyai karakteristik yang mirip dan cenderung berkelompok, dan indeks moran bernilai negatif mengindikasikan otokorelasi spasial negatif yang berarti lokasi yang berdekatan mempunyai karakteristik yang berbeda (Pfeiffer et al. 2008).
Menurut Anselin (1995) interpretasi dari Indeks Moran dapat diringkas sebagai berikut:
a. Otokorelasi spasial positif, ditunjukkan oleh:
yaitu penggelompokkan spasial nilai tinggi atau rendah. b. Otokorelasi spasial negatif, ditunjukkan oleh:
yaitu berbentuk papan catur.
Pengujian hipotesis terhadap parameter I dapat dilakukan sebagai berikut. Hipotesis nol dari otokorelasi spasial adalah:
Hipotesis altematif spatial autocorrelation adalah:
; Terdapat otokorelasi spasial positif, artinya nilai yang sama cenderung berkelompok dalam satu lokasi, penggelompokkan spasial berlaku untuk nilai tinggi atau rendah. Lokasi yang berdekatan mirip.
; Terdapat otokorelasi spasial negatif, artinya lokasi yang ber- dekatan tidak mirip dan membentuk pola visual seperti papan catur.
Menurut Lee & Wong (2001) statistik uji dari Indeks Moran diturunkan dalam bentuk statistik peubah acak normal baku. Hal ini didasarkan pada Teorema Limit Pusat yaitu untuk yang besar dan ragam diketahui maka akan menyebar normal baku sebagai berikut:
dengan adalah indeks Moran, adalah nilai statistik uji Indeks Moran, adalah nilai ekspektasi indeks Moran , dan adalah nilai ragam dari indeks Moran.
dengan
Pengujian ini akan menolak hipotesis nol jika nilai (otokorelasi positif) atau (otokorelasi negatif). Otokorelasi spasial positif megindikasikan bahwa antar lokasi pengamatan memiliki keeratan hubungan.
Local Indicator of Spatial Autocorrelation (LISA)
Local Indicator of Spatial Autocorrelation (LISA) diperkenalkan oleh
Pengidentifikasian koefisien otokorelasi secara lokal dalam pengertian
menemukan korelasi spasial pada setiap lokasi dapat digunakan Indeks Moran.
Berbeda dengan Indeks Moran yang dijelaskan sebelumnya yang merupakan
indikasi dari otokorelasi secara global, Indeks Moran pada LISA mengindikasikan
otokorelasi secara lokal. LISA mengidentifikasi bagaimana hubungan antara suatu
lokasi pengamatan terhadap lokasi pengamatan yang lainnya. Adapun indeksnya
adalah sebagai berikut (Lee & Wong 2001).
dan merupakan deviasi dari nilai harapan,
dan adalah nilai standar deviasi dari .
Pengujian terhadap parameter dapat dilakukan sebagai berikut:
H0 : tidak ada otokorelasi spasial
H1 : terdapat otokorelasi spasial.
Statistik uji yang digunakan adalah:
dengan merupakan indeks LISA, merupakan nilai statistik uji indeks LISA, merupakan nilai ekspektasi indeks LISA, dan merupakan nilai ragam dari indeks LISA.
dan
Pengujian ini akan menolak hipotesis nol jika .
Plot Pencaran Moran (Moran Scatterplot)
Lee & Wong (2001) menyebutkan bahwa plot pencaran Moran adalah salah satu cara untuk menginterpretasikan statistik Indeks Moran. Plot pencaran Moran merupakan alat untuk melihat hubungan antara nilai pengamatan yang sudah distandarisasi dengan nilai harapan daerah tetangga yang telah distandarisasi. Ilustrasi lebih lengkap dapat dilihat pada Gambar 2.2.
Gambar 2.2 Plot pencaran Moran
Perobelli & Haddad (2003) menyebutkan bahwa plot pencaran Moran dibagi atas empat kuadran yang cocok untuk empat pola kumpulan spasial lokal antar lokasi yang bertetangga. Kuadran I (terletak di kanan atas) disebut High-High (HH), menunjukkan lokasi yang mempunyai nilai pengamatan tinggi dikelilingi oleh lokasi yang mempunyai nilai pengamatan tinggi. Kuadran II (terletak di kiri atas) disebut Low-High (LH), menunjukkan lokasi dengan pengamatan rendah tapi dikelilingi lokasi dengan nilai pengamatan tinggi. Kuadran III (terletak di kiri bawah) disebut Low-Low (LL), menunjukkan lokasi dengan nilai pengamatan rendah dan dikelilingi lokasi yang juga mempunyai nilai pengamatan rendah. Kuadran IV (terletak di kanan bawah) disebut High-Low
(HL), menunjukkan lokasi dengan nilai pengamatan tinggi yang dikelilingi oleh lokasi dengan nilai pengamatan rendah.
Lokasi yang terletak di kuadran HH dan LL akan cenderung mempunyai nilai otokorelasi spasial yang positif (cluster) berarti kelompok lokasi ini mempunyai nilai yang mirip. Lokasi yang terletak di kuadran HL dan LH akan
Kuadran I Kuadran II
Kuadran III Kuadran IV HH LH
cenderung mempunyai nilai otokorelasi spasial yang negatif yang berarti kelompok lokasi ini mempunyai nilai yang tidak mirip.
Uji Pengganda Lagrange
Efek spasial yaitu ketergantungan spasial terjadi akibat adanya korelasi antar lokasi. Efek ketergantungan spasial, yaitu ketergantungan lag dan sisaan spasial dapat diuji dengan menggunakan beberapa metode uji pengganda lagrange (Lagrange Multiplier/LM).
Adapun metode LM yang akan digunakan dihitung menggunakan rumus berikut: a. Model Regresi Spasial Lag (SAR)
(tidak ada ketergantungan lag spasial) (ada ketergantungan lag spasial)
Statistik LM yang digunakan untuk model Regresi Spasial Lag adalah sebagai berikut:
dengan
dan adalah vektor sisaan dari model regresi klasik berukuran , diperoleh dari model regresi klasik, dan adalah kuadrat tengah sisaan dari model regresi klasik, menyatakan operasi teras matriks yaitu penjumlahan elemen diagonal suatu matriks (Anselin 1988). Keputusan tolak dilakukan jika nilai statistik uji LM lebih besar dari . Jika ditolak maka model regresi spasial yang dibuat adalah model SAR.
b. Model Regresi Spasial Error (SEM)
(tidak ada ketergantungan sisaan spasial) (ada ketergantungan sisaan spasial).
dengan adalah vektor sisaan dari model regresi berukuran dan menyatakan operasi teras matriks yaitu penjumlahan elemen diagonal suatu matriks (Anselin 1988). Keputusan tolak dilakukan jika nilai statistik uji LM lebih besar dari . Jika ditolak maka model regresi spasial yang dibuat adalah model SEM.
Uji Keragaman Spasial
Keheterogenan ragam spasial juga perlu diuji. Galat yang digunakan dalam pengujian ini adalah galat yang diperoleh dari model regresi berganda dengan unit pengamatannya berupa wilayah. Uji yang digunakan dalam mendeteksi keheterogenan ragam menurut Anselin (1988) dapat dilakukan dengan uji Breusch-Pagan (BP). Secara khusus, Breusch & Pagan (1979) mengusulkan suatu bentuk generik homoskedastisitas yang dinyatakan dalam bentuk persamaan berikut (Arbia 2006):
dengan nilai bernilai nol , adalah konstanta regresi bernilai satu, dan adalah kovariat ke-2 sampai ke- . Berdasarkan kriteria tersebut, hipotesis uji kehomogenan ragam adalah sebagai berikut:
(homoskedastisitas) minimal ada satu (heteroskedastisitas). Statistik Uji BP adalah sebagai berikut:
dengan
Jika tidak ditolak maka kehomogenan ragam terpenuhi sehingga .
Ketidakmampuan mengakomodasi informasi apabila terjadi keragaman spasial akan menghasilkan nilai dugaan parameter regresi yang bias dan hilangnya kemampuan dalam menjelaskan fenomena data yang sebenarnya. Model regresi terboboti geografis adalah metode statistik yang digunakan untuk menganalisis data yang memiliki efek keragaman spasial (Fotheringham et al. 2002).
Model Regresi Terboboti Geografis
Model regresi terboboti geografis (RTG) adalah suatu model yang dikembangkan oleh Fotheringham et al. (2002) dari model regresi sederhana menjadi model regresi terboboti untuk menganalisis heterogenitas spasial. Heterogenitas yang dimaksud adalah suatu keadaan di mana pengukuran hubungan (measurement of relationship) di antara peubah berbeda-beda antara lokasi yang satu dengan lokasi yang lainnya. Heterogenitas spasial terjadi apabila satu kovariat yang sama memberikan respon yang tidak sama pada lokasi yang berbeda di dalam satu lokasi penelitian (Yu & Wei 2005). Menurut Shi et al. (2006), RTG semakin sering digunakan dalam analisis data yang berhubungan dengan heterogenitas spasial.
Model RTG merupakan pengembangan dari model regresi global di mana ide dasarnya diambil dari regresi nonparametrik (Mei 2005). Model ini merupakan model regesi linear lokal (locally linear regression) yang menghasilkan penduga parameter model yang bersifat lokal untuk setiap titik atau lokasi di mana data tersebut dikumpulkan. Dalam model RTG, peubah respon y yang merupakan peubah acak kontinu diprediksi dengan kovariat yang masing-masing koefisien regresinya bergantung pada lokasi di mana data tersebut diamati.
Dalam regresi klasik, nilai parameter diasumsikan sama untuk semua titik lokasi pengamatan, sehingga penduga parameter yang dihasilkan juga bersifat tunggal dan diberlakukan untuk semua lokasi. Berbeda dengan regresi yang tidak memperhatikan faktor lokasi, dalam RTG sangat memperhatikan lokasi sehingga analisis ini seringkali dilanjutkan dengan pemetaan dan dapat didekati dengan sistem informasi geografis (Geographic Information System/GIS).
(2.13) dengan
= nilai pengamatan peubah respon ke-
= nilai pengamatan kovariat pada pengamatan ke- = nilai intersep model regresi RTG
= koefisien regresi
= menyatakan titik koordinat (lintang,bujur) lokasi = galat pengamatan ke- dimana ).
Dalam pengujian hipotesis asumsi yang digunakan dalam model RTG (Leung
et al. 2000) adalah galat diasumsikan saling bebas, identik dan mengikuti sebaran normal dengan nilai harapan nol dan ragam konstan ( . Asumsi ini adalah asumsi yang biasanya digunakan secara teoritis dalam analisis regresi (Leung et al. 2000). Dalam metodologi pendugaan parameter regresi lokal biasanya digunakan untuk mencari penduga yang biasnya sangat kecil. Dalam konteks inilah bias dari penduganya dapat diabaikan. Pendugaan model RTG merupakan pendugaan model regresi lokal (Leung et al. 2000).
Pendugaan Parameter Model RTG
Pendugaan parameter model RTG diperoleh menggunakan metode kuadrat terkecil terboboti (weighted least square) dengan memberikan pembobot yang berbeda untuk setiap lokasi dimana data diamati. Pemberian bobot ini sesuai dengan Hukum I Tobler: “Everything is related to everything else, but near thing are more related than distant things” Segala sesuatu saling berhubungan satu dengan yang lainnya, tetapi sesuatu yang dekat lebih
mempunyai pengaruh daripada sesuatu yang jauh” (Anselin 1988). Sehingga pada
daerah yang lebih jauh. Misalkan adalah matriks pembobot spasial lokasi ke- yang nilai elemen-elemen diagonalnya ditentukan oleh kedekatan pengamatan (lokasi) ke- dengan lokasi lainnya (lokasi ke- ) maka Pendugaan parameter model diperoleh dengan meminimumkan jumlah kuadrat galat dari persamaan (2.14) sebagai berikut:
Misalkan:
.
Matriks pembobotnya merupakan matriks diagonal yang menunjukkan pembobot yang bervariasi dari setiap prediksi paramater pada lokasi yang diformulasikan sebagai berikut:
Penyelesaian persamaan di atas dalam bentuk matriks adalah:
Jika persamaan (2.15) diturunkan terhadap dan hasilnya disamakan dengan nol maka diperoleh penduga parameter model RTG:
(2.16) Pendugaan parameter model RTG pada persamaan (2.16) untuk setiap lokasinya adalah
dengan
harus sekecil mungkin agar merupakan penduga yang efisien. (2.17)
Karena merupakan penduga tak bias bagi dan
sehingga dapat dikatakan bahwa merupakan penduga yang konsisten. Jadi, dapat ditunjukkan bahwa dugaan terhadap parameter-parameter telah memenuhi kriteria dugaan yaitu tidak bias, efisien, dan konsisten.
Misalkan adalah elemen baris ke-i dari matriks . Maka nilai prediksi untuk y pada lokasi pengamatan dapat diperoleh dengan cara sebagai berikut:
Prediksi untuk seluruh pengamatan dapat dituliskan sebagai berikut:
dengan
(2.18)
Matriks I adalah matriks identitas berukuran . Nilai Jumlah Kuadrat Galat (JKG) adalah
(2.19)
Persamaan (2.19) juga dapat dimodifikasi dengan memperhatikan asumsi-asumsi pada model RTG yaitu:
(2.20)
Ragam dari galatnya yaitu
.
(2.21)
Dari persamaan (2.20) dan (2.21) maka persamaan (2.19) dapat dimodifikasi menjadi:
(2.22)
Dari persamaan (2.22) diperoleh bahwa dan diperoleh penduga yang tak bias adalah:
Pengujian Hipotesis Model RTG
Pengujian hipotesis pada model RTG terdiri dari pengujian kesesuaian model RTG dan pengujian parameter model. Pengujian kesesuaian model RTG (goodness of fit) dilakukan dengan hipotesis sebagai berikut:
dan
(tidak ada perbedaan yang nyata antara model regresi linear dan RTG).
(ada perbedaan yang nyata antara model regresi linear dan RTG)
dengan parameter model RTG dan parameter model regresi linear. Penentuan statistik uji berdasarkan pada JKG yang diperoleh masing-masing di bawah H0 dan H1. Di bawah kondisi H0, berarti sama saja dengan
menurunkan JKG untuk regresi linear pada persamaan (2.2). Nilai JKG untuk regresi linear menggunakan metode MKT adalah sebagai berikut:
Di bawah kondisi H1, koefisien regresi yang bervariasi secara spasial pada
persamaan (2.13) ditentukan dengan metode RTG, sehingga diperoleh nilai JKG sebagai berikut:
(2.23) Sehingga diperoleh statistik uji sebagai berikut:
, (Leung et al 2000).
Di bawah kondisi , akan mengikuti sebaran F dengan derajat bebas dan . Jika diambil taraf nyata tolak jika
, dengan
(2.24) Alternatif lain sebagai statistik uji adalah dengan menggunakan selisih jumlah kuadrat residual di bawah H0 dan di bawah H1 (Leung et al. 2000), yaitu:
.
dengan Di bawah , akan
mengikuti sebaran F dengan derajat bebas dan . Jika diambil taraf nyata tolak jika .
Jika disimpulkan bahwa model RTG berbeda nyata dengan model regresi linear, maka langkah selanjutnya adalah melakukan uji parsial untuk mengetahui apakah ada perbedaan pengaruh yang nyata dari peubah penjelas antara satu lokasi dengan lokasi lainnya (Mei et al. 2004). Pengujian ini dapat dilakukan dengan hipotesis:
(tidak ada perbedaan pengaruh yang nyata dari kovariat antara satu lokasi dengan lokasi lainnya).
(ada perbedaan pengaruh yang nyata dari kovariat antara satu lokasi dengan lokasi lainnya).
Untuk melakukan pengujian di atas maka ragam (i = 1, 2, ..., n) ditentukan terlebih dahulu yang dinotasikan dengan:
dengan adalah matriks berukuran dengan semua elemen bernilai 1 dan
,
Vektor adalah vektor kolom berukuran yang bernilai satu untuk elemen ke-k dan nol untuk lainnya. Matriks L seperti pada persamaan (2.18) dan JKG seperti pada persamaan (2.23).
Statistik uji yang digunakan adalah:
.
Bila benar, statistik uji akan menyebar dengan derajat bebas
dan dengan
seperti pada persamaan (2.24). Tolak H0 jika (Leung et al. 2000).
Adapun pengujian nyatasi parameter model pada setiap lokasi dilakukan dengan menguji parameter secara parsial. Pengujian ini dilakukan untuk
mengetahui parameter mana saja yang nyata mempengaruhi peubah responnya. Bentuk hipotesisnya adalah sebagai berikut:
Penduga parameter akan mengikuti sebaran normal multivariat dengan nilai harapan dan matriks ragam peragam dengan
, sehingga didapatkan:
dengan adalah elemen diagonal ke-k dari matriks . Statistik uji yang digunakan adalah:
.
Bila benar, akan mengikuti sebaran dengan derajat bebas sementara itu diperoleh dengan mengakarkan . Jika tingkat nyatasi yang diberikan sebesar , maka diambil keputusan tolak atau dengan kata lain parameter nyata terhadap model jika , dengan .
Lebar Jendela (bandwidth) Optimum
Metode RTG memerlukan data mengenai koordinat titik-titik pengamatan. Koordinat-koordinat tersebut digunakan untuk mendapatkan jarak antar lokasi pengamatan. RTG mengenal dua sistem jarak yaitu sistem jarak terproyeksi dan sistem jarak koordinat menggunakan derajat longitude-latitude. Dalam mengukur jarak, sistem koordinat terproyeksi menggunakan aturan phytagoras. Koordinat pada peta merupakan contoh dari sistem koordinat terproyeksi. Berbeda halnya dengan koordinat terproyeksi, dalam mengukur antar jarak titik pengamatan, sistem koordinat derajat longitude-latitude menggunakan aturan great-circle distance yaitu jarak terpendek dimuka bumi antara dua titik. Pengukuran jarak di muka bumi didasarkan pada aturan World Geodetic System 1984.
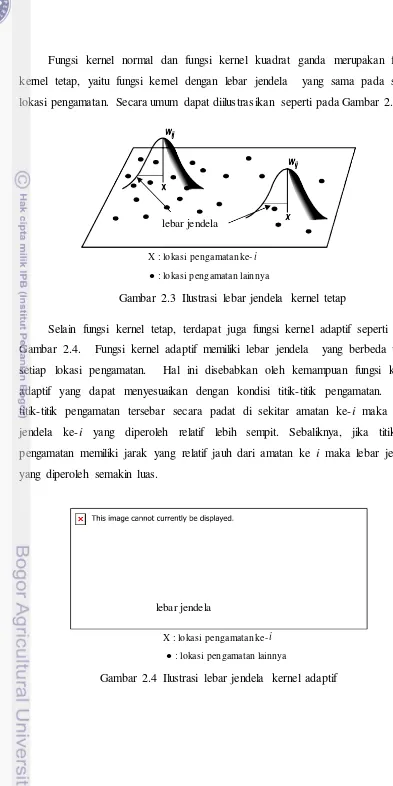
Fungsi kernel normal dan fungsi kernel kuadrat ganda merupakan fungsi kernel tetap, yaitu fungsi kernel dengan lebar jendela yang sama pada setiap lokasi pengamatan. Secara umum dapat diilustrasikan seperti pada Gambar 2.3.
X : lokasi pengamatan ke-i
● : lokasi pengamatan lainnya
Gambar 2.3 Ilustrasi lebar jendela kernel tetap
Selain fungsi kernel tetap, terdapat juga fungsi kernel adaptif seperti pada Gambar 2.4. Fungsi kernel adaptif memiliki lebar jendela yang berbeda untuk setiap lokasi pengamatan. Hal ini disebabkan oleh kemampuan fungsi kernel adaptif yang dapat menyesuaikan dengan kondisi titik-titik pengamatan. Bila titik-titik pengamatan tersebar secara padat di sekitar amatan ke-i maka lebar jendela ke-i yang diperoleh relatif lebih sempit. Sebaliknya, jika titik-titik pengamatan memiliki jarak yang relatif jauh dari amatan ke i maka lebar jendela yang diperoleh semakin luas.
X : lokasi pengamatan ke-i ● : lokasi pengamatan lainnya
Gambar 2.4 Ilustrasi lebar jendela kernel adaptif lebar jendela
Nilai lebar jendela yang sangat kecil akan menyebabkan ragam menjadi semakin besar. Hal itu dikarenakan jika lebar jendela sangat kecil maka akan semakin sedikit pengamatan yang berada dalam radius b, sehingga model yang diperoleh akan sangat kasar karena hasil dugaan dengan menggunakan sedikit pengamatan. Sebaliknya nilai lebar jendela yang besar dapat menimbulkan bias yang semakin besar. Jika lebar jendela sangat besar maka akan semakin banyak pengamatan yang berada dalam radius b, sehingga model yang diperoleh akan terlampau halus, karena hasil dugaan dengan menggunakan banyak pengamatan.
Pemilihan lebar jendela optimum menjadi sangat penting karena akan mempengaruhi ketepatan model terhadap data, yaitu mengatur ragam dan bias dari model. Ada beberapa metode yang digunakan untuk memilih lebar jendela optimum, di antaranya adalah metode Cross Validation (CV), Generalized Cross Validation (GCV). Lebar jendela yang optimum ditunjukkan dengan nilai CV dan GCV yang minimum. Metode tersebut secara matematis didefinisikan sebagai berikut:
dengan
= nilai taksiran dimana pengamatan dilokasi dihilangkan dari proses penaksiran
= nilai penaksir dimana pengamatan dilokasi dimasukkan dalam proses penaksiran
= jumlah penaksir yang efektif = lebar jendela
Matriks Pembobot
Komponen yang mendasar dan diperlukan dari model regresi spasial adalah matriks pembobot. Matriks pembobot pada dasarnya merupakan matriks yang menggambarkan hubungan antar lokasi. Matriks ini mencerminkan adanya hubungan antara satu lokasi dengan lokasi lainnya (Arbia 2005). Matriks pembobot besarnya tergantung pada kedekatan antar lokasi pengamatan. Semakin dekat suatu lokasi, bobot pengaruhnya akan semakin besar.
Beberapa literatur bisa digunakan untuk menentukan besarnya pembobot untuk masing-masing lokasi yang berbeda. Menurut Fotheringham et al. (2002), beberapa fungsi pembobot spasial yang dapat digunakan dalam RTG, antara lain: 1. untuk semua dan .
Model RTG dengan pembobot ini akan menghasilkan model regresi, dimana
setiap data pada setiap lokasi diberikan pembobot yang sama yaitu 1, tanpa melihat letak ataupun jaraknya dengan lokasi lain.
2.
Nilai adalah jarak minimal antar lokasi yang dianggap sudah tidak mempengaruhi nilai pengamatan satu sama lain. adalah jarak antara lokasi danlokasi dimana
3. dengan adalah jarak dari lokasi- ke lokasi- dan adalah lebar jendela (bandwith), yaitu suatu nilai parameter penghalus fungsi yang nilainya selalu positif. Fungsi ini biasa disebut fungsi kernel normal (Gaussian).
4.
5. dengan adalah peringkat (rank) jarak lokasi- ke lokasi- . Jarak paling dekat menghasilkan nilai mendekati 1, dan akan semakin berkurang dengan semakin bertambahnya jarak lokasi- ke lokasi- .
Pemilihan Model Terbaik
Ada beberapa metode yang digunakan untuk memilih model terbaik, salah satunya yaitu Akaike’s Information Criterion (AIC) yang didefinisikan sebagai berikut :
AIC(h) = D(h) + 2K(h)
D(h) merupakan nilai devians model dengan lebar jendela h dan K(h) merupakan jumlah parameter dalam model dengan lebar jendela h (Fotheringham
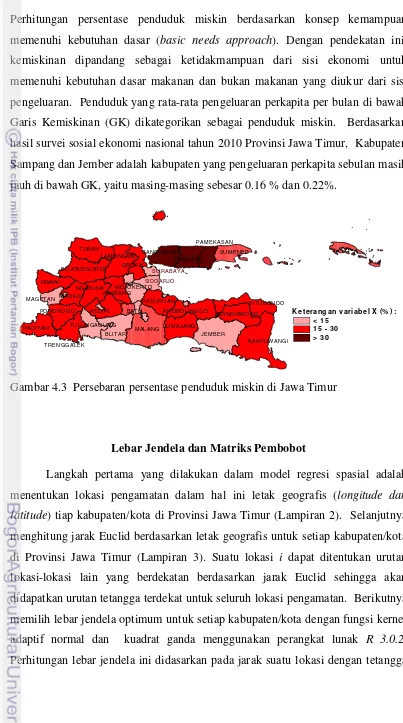
et al. 2002). AIC(h) digunakan karena kompleksitas dari model yaitu perbedaan nilai pengamatan dengan nilai dugaan, AIC(h) juga tergantung pada peubah dalam model serta nilai lebar jendela. Model terbaik adalah model dengan nilai AIC terkecil.
Kerangka Pemikiran Disertasi
Gambar 2.5 Alur kerangka pemikiran disertasi
Data Non Spasial Data Spasial
Mengandung
Data Non Spasial Data Spasial
3 PENDUGAAN PARAMETER REGRESI TERBOBOTI GEOGRAFIS DENGAN KESALAHAN PENGUKURAN
Bentuk model regresi linear dengan kesalahan pengukuran pada kovariat adalah sebagai berikut:
, (3.1a)
(3.1b)
dengan vektor acak dari peubah yang teramati berukuran , matriks rancangan dari pengaruh tetap yang teramati berukuran , vektor parameter pengaruh tetap yang tidak diketahui berukuran , adalah vektor galat acak yang tidak diketahui dengan ). Peubah adalah nilai yang diamati dari dengan kesalahan pengukuran t, di mana t adalah matriks berukuran dari sebaran ) dengan adalah suatu matriks blok yang diketahui berukuran . Kita asumsikan bahwa , dan t saling bebas.
Dengan mensubsitusi ke persamaan (3.1a) maka diperoleh persamaan
, (3.2) Pada persamaan (3.2) terlihat bahwa model kesalahan pengukuran memiliki
bentuk yang serupa dengan model regresi linear campuran, yaitu
, (3.3) dengan matriks rancangan dari pengaruh acak yang teramati berukuran ,
vektor pengaruh acak yang tidak diketahui berukuran dengan
).
Pendugaan model regresi menggunakan pendekatan model linear campuran. Dalam tulisan ini, menggunakan metode skor terkoreksi yang diadopsi dari Nakamura (1990) yang merupakan pendekatan umum pada model kesalahan pengukuran. Dalam metode ini, ditentukan fungsi skor terkoreksi yang nilai harapannya berhubungan dengan sebaran kesalahan pengukuran dengan fungsi skor berdasarkan kovariat yang sebenarnya tidak diketahui.
diagonalnya ditentukan oleh kedekatan pengamatan (lokasi) ke- dengan lokasi lainnya (lokasi ke- ) maka persamaan (3.3) menjadi:
, (3.4) dengan .
Pendugaan Parameter
Salah satu metode pendugaan yang digunakan untuk menduga parameter dalam model linear campuran adalah metode kemungkinan maksimum berkendala (restricted maximum likelihood/REML). Jika adalah parameter pengaruh tetap, nilai harapan dan matriks ragam peragam untuk dari persamaan (3.4) adalah
dan , dengan
. Peubah menyebar normal yaitu, ,
sehingga fungsi log-kemungkinan (log-likelihood) dari berdasarkan sebaran di atasadalah:
dengan anggota himpunan .
Sebaran bersyarat dari adalah dengan .
Fungsi log kemungkinan dari adalah:
i). Penduga pengaruh tetap dan pengaruh acak
Misalkan menyatakan nilai harapan bersyarat jika diketahui. Fungsi kemungkinan terkoreksi harus memenuhi
dan
dengan , dimana adalah pendugaan kemungkinan maksimum dari dan dengan adalah solusi dari persamaan . Kemungkinan terkoreksi bersyarat adalah:
.
Dengan menggunakan persamaan dan diketahui, maka diperoleh dan sebagai berikut:
(3.5)
dan
(3.6)
Jika persamaan (3.5) diturunkan terhadap kemudian hasilnya disamakan dengan nol maka diperoleh:
Jadi pendugaan skor terkoreksi bagi adalah:
. (3.7)
Jika persamaan (3.6) diturunkan terhadap lalu hasilnya disamakan dengan nol maka diperoleh:
Jadi pendugaan skor terkoreksi bagi adalah:
dengan (3.8)
ii). Penduga komponen ragam
Fungsi log-kemungkinan terkoreksi untuk pendugaan adalah:
. (3.9)
Penduga skor terkoreksi adalah nilai vektor yang memaksimumkan . Jika persamaan (3.9) diturunkan terhadap lalu hasilnya disamakan dengan nol maka diperoleh:
Jadi pendugaan skor terkoreksi bagi adalah:
Dengan menggunakan hubungan dari persamaan (3.9) diperoleh:
. (3.11)
Jika , dan
maka persamaan (3.11) diturunkan terhadap
lalu hasilnya disamakan dengan nol adalah:
(3.12)
Dari persamaan (3.12) pendugaan skor terkoreksi dari adalah:
dengan .
Algoritma Pendugaan Parameter
Teorema berikut merupakan perluasan yang diadopsi dari Harvill (1977) dan Fellner (1986) untuk model linear campuran dengan kesalahan pengukuran. Teorema 1 Solusidari sistem persamaan linear
(3.13)
adalah dan , dengan dan masing-masing diberikan pada persamaan (3.7) dan (3.8).
Bukti:
(3.14)
(3.15)
Subsitusi pada persamaan (3.15) menghasilkan
Corollary 1 Berdasarkan Teorema 1 yaitu maka diperoleh
Sebuah algoritma iteratif diperlukan untuk menghitung pendugaan skor terkoreksi bagi θ. Langkah-langkah pendugaan adalah sebagai berikut (Zare et al. 2012):
Langkah 1 : Melakukan iterasi mulai dari pada dan . Langkah 2: Hitung penduga dan sebagai solusi persamaan
linear (3.13). Langkah 3 : Hitung
dan
Langkah 4 : Jika pada langkah 3 sudah konvergen, maka tentukan dan .
Langkah 5 : Jika belum mencapai penduga parameter yang konvergen, maka langkah ke-2 dilakukan kembali sampai mencapai kekonvergenan. Pengujian signifikansi parameter model pada setiap lokasi dilakukan dengan menguji parameter secara parsial. Pengujian ini dilakukan untuk mengetahui parameter mana saja yang signifikan mempengaruhi peubah responnya. Bentuk hipotesisnya (Leung et al.2000) adalah sebagai berikut:
dan .
Penduga parameter akan mengikuti sebaran normal-ganda dengan
nilai harapan dan matriks ragam peragam dengan
, sehingga didapatkan:
dengan adalah elemen diagonal ke-k dari matriks . Sehingga statistik ujiyang digunakan adalah: