DAN SIMULASINYA
DESYARTI SAFARINI TLS
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Dengan ini saya menyatakan bahwa tesis Kajian Model Mikroskopik dan Model Kinetik Lalu Lintas Kendaraan dan Simulasinya adalah karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Bogor, Agustus 2009
Desyarti Safarini TLS
Vehicular Traffic and its Simulation. Under supervision of ENDAR HASAFAH NUGRAHANI and FARIDA HANUM.
A microscopic model describes the actual respons of a single car to its predecessor. The car changes velocity and lanes instantaneously, once certain reaction threshold is reached. A kinetic model resembles the traffic as a system of interacting gas particles described by a distribution function with time evolution. The aims of this thesis are to analyze microscopic single lane model and microscopic multilane model based on reaction thresholds, and also to derive kinetic multilane model and cumulative kinetic model. It is found from the microscopic single lane model that the cars travel at maximum velocity until a critical density is reached, then it decays logarithmically. Furthermore, the maximum traffic flux occurs at a certain point. These results are confirmed with some numerical investigations. From the simulation of microscopic multilane model, it is known that an increase of density will decrease the mean of velocity. Further result shows that the kinetic multilane model is obtained from the gain and loss operators, which are determined by using microscopic interaction. Finally, the kinetic cumulative model is obtained from the kinetic multilane model by assuming that the distribution function are the same on all lanes.
DESYARTI SAFARINI TLS. Kajian Model Mikroskopik dan Model Kinetik Lalu Lintas Kendaraan dan Simulasinya. Dibimbing oleh ENDAR HASAFAH NUGRAHANI dan FARIDA HANUM.
Terdapat tiga jenis model yang digunakan sebagai pendekatan terhadap fenomena arus lalu lintas. Jenis pertama adalah model mikroskopik yang memodelkan respons aktual dari sebuah mobil terhadap pendahulunya. Jenis kedua adalah model makroskopik yang diturunkan berdasarkan persamaan dinamika zat cair. Jenis ketiga adalah model kinetik yang menyajikan level menengah antara model mikroskopik dengan model makroskopik.
Pada model mikroskopik, mobil mengubah kecepatan dan berpindah jalur secara spontan, dan sesekali melewati ambang batas (thresholds). Model mikroskopik berdasarkan reaksi batas digunakan sebagai dasar untuk memperoleh penurunan persamaan model kinetik lalu lintas multijalur. Pada model kinetik, lalu lintas dianggap sebagai interaksi partikel-partikel gas yang dijelaskan oleh fungsi sebaran dengan evolusi waktu yang diberikan oleh persamaan Boltzmann (Schadschneider 2006).
Penelitian ini bertujuan untuk menganalisis kecepatan dan arus berdasarkan kepadatan mobil pada model mikroskopik jalur tunggal, dan menganalisis perubahan kecepatan rata-rata mobil untuk kepadatan yang berbeda berdasarkan interaksi pada model mikroskopik multijalur dengan reaksi batas, serta membuat simulasi dari model mikroskopik jalur tunggal dan model mikroskopik multijalur. Penelitian ini juga bertujuan untuk menurunkan persamaan model kinetik multijalur berdasarkan model mikroskopik dengan reaksi batas, serta menurunkan persamaan model kinetik kumulatif berdasarkan model kinetik multijalur yang memiliki fungsi sebaran sama pada setiap jalur.
Penelitian ini dilakukan dengan menggunakan metode kajian studi pustaka dari model mikroskopik jalur tunggal, model mikroskopik multijalur, model kinetik multi jalur, dan model kinetik kumulatif. Tahap selanjutnya dilakukan pembuatan simulasi terhadap hasil kajian numerik dari model mikroskopik jalur tunggal dan model mikroskopik multijalur.
Dari hasil penelitian ini diperoleh bahwa pada model mikroskopik jalur tunggal mobil bergerak dengan kecepatan maksimum sampai dicapai kepadatan kritis, kemudian kecepatan mobil akan menurun sampai mobil berhenti total yaitu pada kepadatan maksimum. Sedangkan arus lalu lintas meningkat secara linear sampai dicapai kepadatan kritis. Setelah mencapai maksimum, arus akan menurun dan bernilai nol pada kepadatan maksimum.
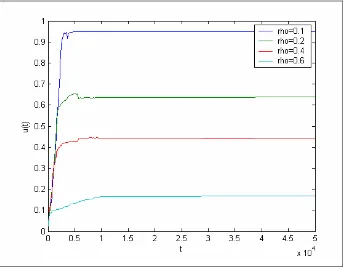
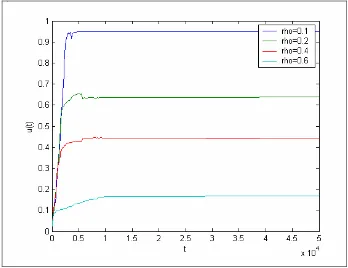
Dari hasil simulasi pada model mikroskopik multijalur, diketahui bahwa dengan kepadatan mobil yang semakin tinggi akan mengakibatkan kecepatan rata-rata mobil juga semakin kecil nilainya. Hal ini sesuai dengan fakta bahwa semakin tinggi kepadatan mobil akan menyebabkan ruang gerak bagi setiap mobil semakin terbatas, sehingga mobil akan bergerak dengan kecepatan yang lebih rendah.
DAN SIMULASINYA
DESYARTI SAFARINI TLS
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains pada
Program Studi Matematika Terapan
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
NRP : G551070071
Disetujui Komisi Pembimbing
Dr. Ir. Endar H. Nugrahani, M.S. Ketua
Dra. Farida Hanum, M.Si. Anggota
Diketahui
Ketua Program Studi Matematika Terapan
Dekan Sekolah Pascasarjana
Dr. Ir. Endar H. Nugrahani, M.S. Prof. Dr. Ir. Khairil A. Notodiputro, M.S.
© Hak Cipta milik IPB, tahun 2009 Hak Cipta dilindungi Undang-undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumber
a. Pengutipan hanya boleh untuk kepentingan pendidikan,
penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah,
b. Pengutipan tidak merugikan kepentingan yang wajar IPB
Penulis dilahirkan di Jakarta pada tanggal 5 Desember 1983 dari ayah Alm. H. Mukmin Siswanto dan ibu Hj. Siti Mukminah. Penulis merupakan putri ke-6 dari enam bersaudara.
Tahun 2001 penulis lulus dari SMA Negeri 112 Pesanggrahan Jakarta Barat. Pada bulan Juli tahun 2001, penulis lulus seleksi masuk Universitas Negeri Jakarta melalui jalur UMPTN. Penulis memilih program studi Pendidikan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam.
DAN SIMULASINYA
DESYARTI SAFARINI TLS
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Dengan ini saya menyatakan bahwa tesis Kajian Model Mikroskopik dan Model Kinetik Lalu Lintas Kendaraan dan Simulasinya adalah karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Bogor, Agustus 2009
Desyarti Safarini TLS
Vehicular Traffic and its Simulation. Under supervision of ENDAR HASAFAH NUGRAHANI and FARIDA HANUM.
A microscopic model describes the actual respons of a single car to its predecessor. The car changes velocity and lanes instantaneously, once certain reaction threshold is reached. A kinetic model resembles the traffic as a system of interacting gas particles described by a distribution function with time evolution. The aims of this thesis are to analyze microscopic single lane model and microscopic multilane model based on reaction thresholds, and also to derive kinetic multilane model and cumulative kinetic model. It is found from the microscopic single lane model that the cars travel at maximum velocity until a critical density is reached, then it decays logarithmically. Furthermore, the maximum traffic flux occurs at a certain point. These results are confirmed with some numerical investigations. From the simulation of microscopic multilane model, it is known that an increase of density will decrease the mean of velocity. Further result shows that the kinetic multilane model is obtained from the gain and loss operators, which are determined by using microscopic interaction. Finally, the kinetic cumulative model is obtained from the kinetic multilane model by assuming that the distribution function are the same on all lanes.
DESYARTI SAFARINI TLS. Kajian Model Mikroskopik dan Model Kinetik Lalu Lintas Kendaraan dan Simulasinya. Dibimbing oleh ENDAR HASAFAH NUGRAHANI dan FARIDA HANUM.
Terdapat tiga jenis model yang digunakan sebagai pendekatan terhadap fenomena arus lalu lintas. Jenis pertama adalah model mikroskopik yang memodelkan respons aktual dari sebuah mobil terhadap pendahulunya. Jenis kedua adalah model makroskopik yang diturunkan berdasarkan persamaan dinamika zat cair. Jenis ketiga adalah model kinetik yang menyajikan level menengah antara model mikroskopik dengan model makroskopik.
Pada model mikroskopik, mobil mengubah kecepatan dan berpindah jalur secara spontan, dan sesekali melewati ambang batas (thresholds). Model mikroskopik berdasarkan reaksi batas digunakan sebagai dasar untuk memperoleh penurunan persamaan model kinetik lalu lintas multijalur. Pada model kinetik, lalu lintas dianggap sebagai interaksi partikel-partikel gas yang dijelaskan oleh fungsi sebaran dengan evolusi waktu yang diberikan oleh persamaan Boltzmann (Schadschneider 2006).
Penelitian ini bertujuan untuk menganalisis kecepatan dan arus berdasarkan kepadatan mobil pada model mikroskopik jalur tunggal, dan menganalisis perubahan kecepatan rata-rata mobil untuk kepadatan yang berbeda berdasarkan interaksi pada model mikroskopik multijalur dengan reaksi batas, serta membuat simulasi dari model mikroskopik jalur tunggal dan model mikroskopik multijalur. Penelitian ini juga bertujuan untuk menurunkan persamaan model kinetik multijalur berdasarkan model mikroskopik dengan reaksi batas, serta menurunkan persamaan model kinetik kumulatif berdasarkan model kinetik multijalur yang memiliki fungsi sebaran sama pada setiap jalur.
Penelitian ini dilakukan dengan menggunakan metode kajian studi pustaka dari model mikroskopik jalur tunggal, model mikroskopik multijalur, model kinetik multi jalur, dan model kinetik kumulatif. Tahap selanjutnya dilakukan pembuatan simulasi terhadap hasil kajian numerik dari model mikroskopik jalur tunggal dan model mikroskopik multijalur.
Dari hasil penelitian ini diperoleh bahwa pada model mikroskopik jalur tunggal mobil bergerak dengan kecepatan maksimum sampai dicapai kepadatan kritis, kemudian kecepatan mobil akan menurun sampai mobil berhenti total yaitu pada kepadatan maksimum. Sedangkan arus lalu lintas meningkat secara linear sampai dicapai kepadatan kritis. Setelah mencapai maksimum, arus akan menurun dan bernilai nol pada kepadatan maksimum.
Dari hasil simulasi pada model mikroskopik multijalur, diketahui bahwa dengan kepadatan mobil yang semakin tinggi akan mengakibatkan kecepatan rata-rata mobil juga semakin kecil nilainya. Hal ini sesuai dengan fakta bahwa semakin tinggi kepadatan mobil akan menyebabkan ruang gerak bagi setiap mobil semakin terbatas, sehingga mobil akan bergerak dengan kecepatan yang lebih rendah.
DAN SIMULASINYA
DESYARTI SAFARINI TLS
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains pada
Program Studi Matematika Terapan
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
NRP : G551070071
Disetujui Komisi Pembimbing
Dr. Ir. Endar H. Nugrahani, M.S. Ketua
Dra. Farida Hanum, M.Si. Anggota
Diketahui
Ketua Program Studi Matematika Terapan
Dekan Sekolah Pascasarjana
Dr. Ir. Endar H. Nugrahani, M.S. Prof. Dr. Ir. Khairil A. Notodiputro, M.S.
© Hak Cipta milik IPB, tahun 2009 Hak Cipta dilindungi Undang-undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumber
a. Pengutipan hanya boleh untuk kepentingan pendidikan,
penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah,
b. Pengutipan tidak merugikan kepentingan yang wajar IPB
Penulis dilahirkan di Jakarta pada tanggal 5 Desember 1983 dari ayah Alm. H. Mukmin Siswanto dan ibu Hj. Siti Mukminah. Penulis merupakan putri ke-6 dari enam bersaudara.
Tahun 2001 penulis lulus dari SMA Negeri 112 Pesanggrahan Jakarta Barat. Pada bulan Juli tahun 2001, penulis lulus seleksi masuk Universitas Negeri Jakarta melalui jalur UMPTN. Penulis memilih program studi Pendidikan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam.
Puji dan syukur penulis panjatkan kepada Allah SWT atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Judul yang dipilih dalam penelitian yang dilaksanakan sejak bulan Nopember 2008 ini adalah Kajian Model Mikroskopik dan Model Kinetik Lalu Lintas Kendaraan dan Simulasinya.
Terima kasih penulis ucapkan kepada Ibu Dr. Ir. Endar H. Nugrahani, M.S. dan Ibu Dra. Farida Hanum, M.Si. selaku pembimbing yang telah banyak memberi saran dalam penulisan tesis ini. Ungkapan terima kasih juga penulis sampaikan kepada ibu, kakak-kakak, seluruh keluarga, dan teman-teman atas segala doa, dukungan, serta kasih sayangnya. Juga kepada semua pihak yang telah turut membantu dalam penulisan tesis ini, penulis berdoa semoga Allah SWT membalas mereka dengan kebaikan.
Semoga karya ilmiah ini bermanfaat.
Bogor, Agustus 2009
Halaman
DAFTAR TABEL ... DAFTAR GAMBAR ... DAFTAR LAMPIRAN... 1 PENDAHULUAN
1.1 Latar Belakang ... 1.2 Tujuan Penelitian ... 1.3 Manfaat Penelitian ... 2 TINJAUAN PUSTAKA
2.1 Teori Peluang ... 2.2 Besaran Lalu Lintas ... 2.3 Teori Mikroskopik ... 2.4 Teori Kinetik ... 2.5 Persamaan Kinetik ... 2.6 Ekuilibrium dan Arus Lalu Lintas Homogen ... 3 METODE PENELITIAN
4 HASIL DAN PEMBAHASAN
4.1 Model Mikroskopik Jalur Tunggal ... 4.1.1 Kepadatan dan Kecepatan Mobil pada Kondisi Ekuilibrium .. 4.1.2 Arus Lalu Lintas Maksimum pada Kondisi Ekuilibrium ... 4.2 Model Mikroskopik Multijalur ... 4.3 Model Kinetik ... 4.3.1 Pendekatan dari Sebaran Mobil di Posisi Depan ... 4.3.2 Model Ruang Stokastik Homogen ... 4.3.3 Sebaran Mobil di Posisi Depan ... 4.3.4 Peluang Perpindahan Jalur ... 4.3.5 Persamaan Model Kinetik Multijalur ... 4.3.6 Persamaan Model Kinetik Kumulatif ... 5 HASIL SIMULASI
5.1 Hasil Representasi Numerik Model Mikroskopik Jalur Tunggal ... 5.2 Hasil Simulasi Model Mikroskopik Multijalur... 6 SIMPULAN DAN SARAN
6.1 Simpulan ... 6.2 Saran ...
x x x
1 2 3
4 6 7 9 9 11 12
14 15 18 20 25 25 29 29 33 36 41
43 45
LAMPIRAN ... 52
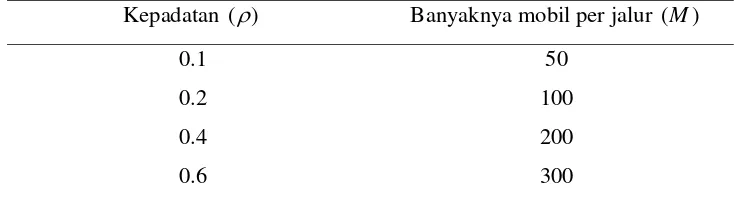
x Halaman 1 Besaran parameter model mikroskopik jalur tunggal ...
2 Banyaknya mobil per jalur berdasarkan kepadatan ... 3 Besaran parameter model mikroskopik multijalur ...
44 46 46
DAFTAR GAMBAR
Halaman 1 Plot antara kecepatan dengan kepadatan ...
2 Plot antara arus dengan kepadatan ... 3 Skema posisi mobil pada jalan raya ... 4 Representasi numerik model mikroskopik jalur tunggal ... 5 Plot u(t) untuk nilai ρ yang berbeda ...
18 20 20 44 47
DAFTAR LAMPIRAN
Halaman 1 Lampiran 1 ...
2 Lampiran 2 ...
xi Halaman 1 Plot antara kecepatan dengan kepadatan ...
2 Plot antara arus dengan kepadatan ... 3 Skema posisi mobil pada jalan raya... 4 Representasi numerik model mikroskopik jalur tunggal ... 5 Plot u(t) untuk nilai ρ yang berbeda ...
xii Halaman 1 Lampiran 1 ...
2 Lampiran 2 ...
PENDAHULUAN
1.1 Latar Belakang
Lalu lintas adalah gerak kendaraan bermotor, kendaraan tidak bermotor, pejalan
kaki dan hewan di jalan yang merupakan salah satu cabang dari transportasi yang
menyangkut operasi dari jalan. Oleh karena itu, lalu lintas merupakan aspek yang
penting bagi kehidupan manusia guna mempermudah seseorang untuk sampai ke
suatu lokasi tertentu untuk melakukan berbagai macam aktivitas sehari-hari. Lalu
lintas juga menggambarkan fenomena nyata dengan perilaku yang kompleks pada
kehidupan sehari-hari. Salah satu fenomena nyata dalam lalu lintas yang menarik
untuk diamati yaitu perilaku pengemudi mobil di jalan raya. Perilaku dari pengemudi
mobil di jalan raya dapat dipengaruhi oleh kebiasaan pengemudi saat mengendarai
mobil, perilaku pengemudi mobil di posisi depan, kondisi jalan raya, dan lain
sebagainya. Perilaku pengendara mobil di jalan raya dapat memengaruhi kondisi arus
lalu lintas dan menarik untuk dikaji lebih lanjut.
Dari salah satu contoh mengenai perilaku pengendara mobil di jalan raya,
menunjukkan bahwa fenomena lalu lintas merupakan masalah yang menarik untuk
diteliti dan dikaji lebih lanjut khususnya bagi para peneliti dengan menggunakan
bermacam-macam model lalu lintas. Terdapat tiga jenis model yang digunakan
sebagai pendekatan terhadap fenomena lalu lintas. Jenis pertama dan paling mendasar
adalah model mikroskopik yang memodelkan respons aktual dari sebuah mobil
terhadap pendahulunya. Jenis kedua adalah model makroskopik yang diturunkan
berdasarkan persamaan dinamika zat cair. Jenis ketiga adalah model kinetik yang
menyajikan level menengah antara model mikroskopik dengan model makroskopik.
Model kinetik dapat diturunkan melalui model mikroskopik, di sisi lain beberapa
model makroskopik juga dapat diturunkan dari model kinetik (Klar & Wegener
1998a).
Model mikroskopik memfokuskan perhatian pada respons dari suatu mobil
perubahan kecepatan mobil dan perpindahan jalur secara spontan, dan sesekali mobil
melewati ambang batas (
thresholds
). Model mikroskopik berdasarkan reaksi batas
digunakan sebagai dasar untuk memperoleh penurunan persamaan model kinetik lalu
lintas multijalur.
Pada model kinetik, lalu lintas dianggap sebagai interaksi partikel-partikel gas
yang dijelaskan oleh fungsi sebaran dengan evolusi waktu yang diberikan oleh
persamaan Boltzmann (Schadschneider 2006). Jenis model kinetik yang pertama kali
diperkenalkan oleh Prigogine & Herman (1971) menjelaskan bahwa persamaan
Boltzmann merupakan suatu aturan untuk menghitung interaksi perlambatan suatu
mobil. Pada perkembangan selanjutnya, Nelson (1994) memperoleh persamaan
kinetik yang lebih rasional, yaitu dengan menggunakan interaksi model mikroskopik.
Penelitian ini akan mengkaji beberapa model yang menggambarkan fenomena
lalu lintas pada jalan dengan jalur tunggal dan jalan dengan multijalur kendaraan.
Pada kajian awal akan dijelaskan mengenai model mikroskopik jalur tunggal dan
model mikroskopik multijalur dengan reaksi batas. Selanjutnya juga akan dikaji
mengenai persamaan model kinetik multijalur dan model kinetik kumulatif. Pada
bagian akhir akan dievaluasi hasil simulasi dari kajian numerik model mikroskopik
jalur tunggal, dan model mikroskopik multijalur. Evaluasi dilakukan secara eksplisit
terhadap kepadatan, kecepatan, dan arus lalu lintas pada model mikroskopik jalur
tunggal. Evaluasi juga dilakukan terhadap hasil simulasi kecepatan rata-rata mobil
pada model mikroskopik multijalur dengan menggunakan reaksi batas.
1.2 Tujuan Penelitian
Tujuan dari penelitian ini adalah:
1.
Menganalisis kecepatan dan arus berdasarkan kepadatan mobil pada model
mikroskopik jalur tunggal.
2.
Menganalisis perubahan kecepatan rata-rata mobil untuk kepadatan yang
berbeda berdasarkan interaksi pada model mikroskopik multijalur dengan
3.
Menurunkan persamaan model kinetik multijalur yang diperoleh berdasarkan
model mikroskopik multijalur dengan reaksi batas.
4.
Menurunkan persamaan model kinetik kumulatif yang dikembangkan
berdasarkan model kinetik multijalur.
5.
Membuat simulasi dari hasil kajian numerik model mikroskopik jalur tunggal
dan model mikroskopik multijalur.
1.3 Manfaat Penelitian
Manfaat dari penelitian ini adalah:
1.
Memberikan pendekatan terhadap masalah fenomena lalu lintas multijalur
dengan menggunakan model mikroskopik dan model kinetik berdasarkan
reaksi batas.
2.
Memberikan interpretasi mengenai hubungan antara kepadatan, kecepatan,
dan arus lalu lintas jalur tunggal berdasarkan hasil evaluasi simulasi model
mikroskopik jalur tunggal.
3.
Memberikan interpretasi mengenai hubungan antara kecepatan rata-rata mobil
dengan kepadatan mobil pada lalu lintas multijalur dengan menggunakan
2.1 Teori Peluang
Teori peluang memiliki keterkaitan dengan masalah fenomena lalu lintas. Peluang perpindahan ke jalur kanan, peluang perpindahan ke jalur kiri, dan peluang pengereman merupakan beberapa contoh yang menggambarkan keterkaitan antara teori peluang dengan masalah lalu lintas. Beberapa istilah mengenai teori peluang didefinisikan sebagai berikut:
Definisi 2.1.1 (Ruang Sampel)
Himpunan semua hasil dari suatu percobaan acak disebut ruang sampel, yang dinotasikan dengan S. Himpunan bagian dari suatu ruang sampel disebut kejadian.
Definisi 2.1.2 (Peluang Suatu Kejadian)
Misalkan S adalah ruang sampel dari suatu fenomena acak. Untuk setiap kejadian A pada S, P(A) disebut sebagai peluang dari kejadian A apabila memenuhi syarat-syarat berikut:
1. P(A)≥0 2. P(S)=1
3. Jika
{
A1,A2,...}
adalah barisan kejadian yang saling lepas, yaitu=
∩ j
i A
A Ø untuk setiap pasangan i,j dengan i≠ j, maka
(
)
∑
∞= ∞
= =
∪
1
1 ( )
i i i
i A P A
P .
Definisi 2.1.3 (Peubah Acak)
Misalkan S adalah suatu ruang acak dari suatu percobaan. Suatu fungsi yang bernilai real yaitu X :S→R disebut sebagai peubah acak (random variable)dari percobaan jika untuk setiap I⊆R,
{
s:X(s)∈I}
adalah suatu kejadian.Definisi 2.1.4 (Fungsi Sebaran)
Jika X adalah peubah acak, maka fungsi F yang terdefinisi pada interval )
,
Definisi 2.1.5 (Peubah Acak Kontinu)
Peubah acak X dikatakan kontinu jika fungsi sebarannya dapat diekspresikan sebagai
∫
∞ −= x
du u f x
F( ) ( ) ,
untuk suatu fungsi f : R →
[
0,∞)
yang terintegralkan. Selanjutnya fungsi fdisebut sebagai fungsi kepekatan peluang (probability density function) bagi X.
Definisi 2.1.6 (Fungsi Sebaran Bersama)
Fungsi sebaran bersama dari dua peubah acak X dan Y adalah fungsi :
F R2 →
[ ]
0,1 yang diberikan oleh) , ( ) ,
(x y P X xY y
F = ≤ ≤ ,
untuk semua −∞<x, y<∞.
Definisi 2.1.7 (Sebaran Bersama Dua Peubah Acak Kontinu)
Misalkan X dan Y adalah dua peubah acak kontinu yang menyebar bersama dengan f(x,y) adalah fungsi kepekatan peluang bersama dari X dan Y yang terintegralkan. Fungsi sebaran bersama dari peubah acak X dan Y dapat diekspresikan sebagai
∫ ∫
∞ − −∞= y x
dv du v u f y
x
F( , ) ( , )
untuk setiap x,y∈R.
Definisi 2.1.8 (Fungsi Sebaran Bersama dan Kepekatan Peluang Marginal)
Misalkan X dan Y adalah peubah acak kontinu yang menyebar bersama dengan fungsi sebaran bersama F(x,y) dan fungsi kepekatan peluang bersama
) , (x y
f . Fungsi sebaran marginal dari peubah acak X dan Y berturut-turut adalah )
, ( ) ( )
(x =P X ≤x =F x ∞ FX
) , ( ) ( )
(y P Y y F y
FY = ≤ = ∞ .
Fungsi kepekatan peluang marginal dari peubah acak X dan Y berturut-turut adalah
∫
∞∞ −
= f x y dy
x
∫
∞∞ −
= f x y dx
y
fY( ) ( , ) .
Definisi 2.1.9 (Peubah Acak Seragam)
Peubah acak X dikatakan menyebar seragam pada interval (a,b) jika memiliki fungsi kepekatan peluang yang didefinisikan sebagai
⎪⎩ ⎪ ⎨
⎧ < <
− = ′ =
selainnya. untuk
, 0
untuk , 1 ) ( )
(x F x b a a x b
f
Definisi 2.1.10 (Peubah Acak Eksponensial)
Peubah acak X dikatakan menyebar eksponensial dengan parameter λ>0 jika memiliki fungsi kepekatan peluang yang didefinisikan sebagai
⎩ ⎨ ⎧
< ≥ −
= ′
= −
. 0 untuk , 0
0 untuk , 1 ) ( ) (
x x e
x F x f
x
λ
(Ghahramani 2005)
Definisi 2.1.11 (Proses Stokastik)
Proses stokastik X =
{
X(t),t∈T}
adalah suatu koleksi (gugus, himpunan, atau kumpulan) dari peubah acak, di mana untuk setiap t∈T, X(t) adalah peubah acak. Dalam hal ini X(t) adalah state dari proses pada waktu t. Jika Tmerupakan himpunan yang tercacah maka X adalah proses stokastik dengan waktu diskret. Jika T merupakan suatu interval maka X adalah proses stokastik dengan waktu kontinu.
(Ross 1996)
2.2 Besaran Lalu Lintas
Misalkan f(x,v,t) adalah fungsi kepekatan peluang adanya mobil yang berada di posisi x dengan kecepatan v pada waktu t dan kecepatan maksimum mobil adalah w. Fungsi kepekatan peluang f(x,v,t) dapat digunakan untuk memperoleh beberapa besaran pada fenomena lalu lintas, yaitu sebagai berikut:
1. Banyaknya Mobil
Banyaknya mobil yang berada di posisi x dan bergerak dengan kecepatan v
∫∫
∞=w f x v t dxdv
t M
0 0
) , , ( )
( , dengan v∈
[ ]
0,w .2. Kepadatan
Kepadatan mobil di posisi x pada waktu t didefinisikan sebagai
∫
=w f x v t dv
t x
0
) , , ( ) , (
ρ , dengan v∈
[ ]
0,w . 3. Kecepatan Rata-rataKecepatan rata-rata dari mobil-mobil yang berada di posisi x pada waktu t
didefinisikan sebagai
∫
= wv f x v t dv
t x t x V
0
) , , ( ) , (
1 ) , (
ρ , dengan v∈
[ ]
0,w .4. Ragam Kecepatan
Ragam kecepatan dari mobil-mobil yang berada di posisi x pada waktu t
didefinisikan sebagai
∫
−= w v V xt f x vt dv
t x t
x
0
2
) , , ( )) , ( ( ) , (
1 ) , (
ρ
θ , dengan v∈
[ ]
0,w .5. Arus Lalu Lintas
Arus lalu lintas dari mobil-mobil yang berada di posisi x pada waktu t
didefinisikan sebagai
∫
=
= x t V x t wv f x v t dv
t x j
0
) , , ( )
, ( ) , ( ) ,
( ρ , dengan v∈
[ ]
0,w .6. Tekanan Lalu Lintas
Tekanan lalu lintas dari mobil-mobil yang berada di posisi x pada waktu t
didefinisikan sebagai
= = ( , ) ( , ) )
,
(xt xt xt
S ρ θ
∫
−w
dv t v x f t x V v
0
2
) , , ( )) , (
( , dengan v∈
[ ]
0,w .(Klar et al. 1996)
2.3 Teori Mikroskopik
(Klar & Wegener 1996). Jika suatu mobil bergerak lebih cepat daripada mobil di posisi depan dan jarak mobil tersebut terhadap mobil di posisi depan lebih kecil dibandingkan dengan ambang batas, maka pengendara akan mengerem untuk mengurangi kecepatan mobil yang dikendarai atau mendahului mobil di posisi depan. Jika mobil bergerak lebih lambat dibandingkan dengan mobil di posisi depan sehingga jarak mobil tersebut terhadap mobil di posisi depan lebih besar dibandingkan ambang batas, maka mobil tersebut akan berakselerasi. Ambang batas dalam hal ini merupakan jarak minimum antara suatu mobil dengan mobil di posisi depan yang terkait dengan interaksi tertentu antara keduanya.
Secara umum ambang batas bergantung pada kecepatan mobil dan kecepatan mobil di posisi depannya. Pergerakan mobil diwakili oleh persamaan diferensial biasa orde dua, yaitu 2 ( , 1, , ,...)
2
t dt dx x x a dt
x
d k
k k k k
+
= , dengan asumsi
bahwa perubahan akselerasi terjadi secara spontan jika mobil ke-k melewati suatu ambang batas. Lebih lanjut, untuk memperoleh persamaan kinetik, diasumsikan bahwa perubahan kecepatan mobil berdasarkan interaksi pada model mikroskopik yang terjadi secara spontan.
Andaikan mobil di posisi depan yaitu mobil ke-1 berada pada lokasi x1 dengan kecepatan v1 dan di belakang mobil ke-1 terdapat mobil ke-2 yang berada pada lokasi x2 dengan kecepatan v2. Diasumsikan bahwa v1 dan v2 berada pada interval kecepatan
[ ]
0,w , dengan w adalah kecepatan maksimum mobil.Misalkan K adalah banyaknya ambang batas yang dipertimbangkan. Jika mobil ke-2 melalui ambang batas i∈
{
1,...,K}
, yaitu jarak h=x1−x2 menjadi lebih besar atau lebih kecil dari pada ambang batas h=Hi(v1,v2), maka mobil ke-2 mengubah kecepatannya menjadi kecepatan baru yaitu v. Kecepatan yang baru diperoleh secara spontan dalam kaitannya terhadap fungsi sebaran tertentu dengan fungsi kepekatan σi(v,v1,v2;ρ), (v1,v2)∈Ωi. Oleh karena σi adalah fungsi kepekatan, maka harus memenuhi1 ) ; , , ( 0
2
1 =
∫
w
i v v v ρ dv
2.4 Teori Kinetik
Kibble & Berkshire (1996) mendefinisikan bahwa teori kinetik adalah suatu cabang ilmu fisika yang mempelajari sifat-sifat mikroskopik molekul dan interaksi yang berhubungan dengan sifat-sifat makroskopik benda seperti hukum gas ideal. Asumsi-asumsi yang mendasari teori kinetik adalah:
1. Jumlah molekul sangat banyak.
2. Molekul-molekul tersebut merupakan molekul tunggal yang identik. 3. Molekul bergerak secara acak.
4. Gerak molekul tidak melanggar hukum gerak Newton.
5. Molekul mengalami tumbukan elastis dengan molekul lainnya. 6. Gaya gravitasi antarmolekul diabaikan.
Sifat-sifat molekul didekati dengan menggunakan sifat-sifat partikel dengan tidak mengabaikan hukum-hukum mekanika klasik.
2.5 Persamaan Kinetik
Misalkan f(x,v,t) adalah fungsi kepekatan peluang yang telah didefinisikan sebagaimana sebelumnya, l menyatakan panjang jalan dan w menyatakan kecepatan maksimum mobil. Persamaan kinetik yang menyatakan perpindahan mobil dapat didefinisikan oleh
L G
x t
t f t
f f
v
f ⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = +
δ δ δ
δ
,
dengan t∈
[
0,∞)
, x∈[ ]
0,l , v∈[ ]
0,w , danG
t f
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛
δ δ
dan
L
t f
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛
δ δ
adalah operator
perolehan (gain terms) dan operator kehilangan (loss terms) berdasarkan ketidakkontinuan perubahan kecepatan mobil (Klar & Wegener 1997). Lebih lanjut, operator perolehan dan operator kehilangan dapat dinyatakan sebagai
∑
= ⎟⎟⎠⎞ ⎜⎜ ⎝ ⎛ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝
⎛ K
i
i
G
G t
f t
f
1 δ
δ δ
δ
,
∑
= ⎟⎟⎠
⎞ ⎜⎜ ⎝ ⎛ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝
⎛ K
i
i
L
L t
f t
f
1 δ
δ δ
δ
dengan i G t f ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ δ δ dan i L t f ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ δ δ
adalah operator perolehan dan operator kehilangan
dari ambang batas ke-i. Operator perolehan dan operator kehilangan juga didefinisikan oleh
∑ ∫∫
= ∈Ω + − = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Ki v v
i i G i dv dv t v v v H x v x f v v v v v t f
1( , )
2 1 1 2 1 2 1 2 1 1 2 2 1 ) , ), , ( , , ( ) ; , , ( ρ σ δ δ
∑ ∫
= ∈Ω + − = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Ki vv
i L i dv t v v v H x v x f v v t f
1( , )
1 1 1 1 1 1 ) , ), , ( , , ( δ δ ,
dengan f1(x,v2,x+d,v1,t) menotasikan fungsi sebaran dari pasangan mobil pada posisi x dan mobil di posisi depan pada posisi x+d, dan
∫
=
= x t wf x v t dv
0 ) , , ( ) , ( ρ ρ .
Lebih lanjut, Nelson (1995) memperkenalkan model korelasi untuk persamaan kinetik lalu lintas yang mengekspresikan f1 sebagai
) , , ( ~ ) , , ( ) , , ( ) , , , ,
( 2 1 2 1
1 x v x d v t f x v t f x d v t k x d t
f + = + .
Sebagai tambahan juga diasumsikan bahwa k~ tidak bergantung secara eksplisit pada x dan t, tetapi hanya bergantung pada kepadatan lokal. Oleh karena itu f1 dapat dinyatakan sebagai
)) , ( , ( ) , , ( ) , , ( ) , , , ,
( 2 1 2 1
1 x v x d v t f x v t f x d v t k d x t
f + = + ρ ,
dengan k bergantung pada ⎟
⎠ ⎞ ⎜ ⎝ ⎛ + 2 d x
ρ dan k merupakan fungsi umum dari ρ(.,t). Didefinisikan )Ci+(f merupakan suatu besaran yang menggambarkan resultan dari interaksi antarobjek yang dinyatakan sebagai
∫∫
Ω ∈ + = − i v v i ii f v v v v v xt k H v v f x v t
C ) , ( 2 2 1 2 1 1 2 2 1 ) , , ( ) ), , ( ( )) , ( ; , , ( ) ( σ ρ ρ
f(x+Hi(v1,v2),v1,t)dv1dv2
∫
Ω ∈ + − − i v v ii vv f x vt f x H v v v t dv
H k v v ) , ( 1 1 1 1 1 1 ) , ), , ( ( ) , , ( ) ), , ( ( ρ .
∑
=+
=
+ K
i i x
t vf C f
f
1 ) ( .
2.6 Ekuilibrium dan Arus Lalu Lintas Homogen
Dalam fenomena lalu lintas, kondisi ekuilibrium dapat didefinisikan sebagai suatu kondisi pada jalan raya di mana setiap mobil berjarak sama terhadap mobil di posisi depan, dan setiap mobil juga bergerak dengan kecepatan yang sama (Illner et al. 2004).
Penelitian ini dilakukan dengan menggunakan metode kajian studi pustaka dan dilanjutkan dengan pembuatan simulasi terhadap hasil kajian numerik dari model yang dikaji berdasarkan studi pustaka. Prosedur penelitian ini adalah sebagai berikut:
1. Mengkaji model mikroskopik jalur tunggal dengan banyaknya mobil adalah M. Tahapan dalam mengkaji model mikroskopik jalur tunggal adalah sebagai berikut:
a) Menentukan kepadatan mobil di jalur tunggal yaitu ρ pada kondisi ekuilibrium.
b) Menentukan kecepatan dan arus lalu lintas berdasarkan kepadatan mobil.
c) Dengan menggunakan bahasa pemrograman Matlab 6.5 akan dibuat representasi kajian numerik dari kecepatan dan arus lalu lintas berdasarkan kepadatan mobil.
d) Mengevaluasi hasil representasi dari kajian numerik model mikroskopik jalur tunggal.
2. Mengkaji interaksi pada model mikroskopik multijalur dengan menggunakan reaksi batas. Asumsi dasar dari model mikroskopik multijalur adalah bahwa skala waktu memperbolehkan terjadinya perlakuan spontan dari setiap interaksi. Tahapan dalam kajian model mikroskopik multijalur adalah sebagai berikut:
a) Menentukan aturan dan kondisi yang diperlukan oleh sebuah mobil untuk melakukan interaksi pindah ke jalur kanan, pindah ke jalur kiri, mengerem, akselerasi pengikut, atau akselerasi bebas.
b) Menentukan perubahan kecepatan mobil setelah terjadi interaksi. c) Dengan menggunakan bahasa pemrograman Matlab 6.5 akan
d) Mengevaluasi hasil simulasi dari kajian numerik model mikroskopik multijalur.
3. Selanjutnya, menurunkan persamaan model kinetik multijalur berdasarkan model mikroskopik multijalur dengan reaksi batas. Pada model kinetik multijalur peluang perpindahan jalur suatu mobil diperoleh dari sebaran mobil di posisi depan. Tahapan dalam memperoleh persamaan model kinetik multijalur adalah sebagai berikut:
a) Mengkaji sebaran mobil di posisi depan
b) Mengkaji peluang perpindahan suatu mobil ke jalur kanan atau ke jalur kiri.
c) Menentukan operator perolehan (G) dan operator kehilangan (L) dari masing-masing interaksi.
d) Menentukan aproksimasi dari operator perolehan (G) dan operator kehilangan (L) untuk setiap interaksi guna memperoleh pendekatan yang sesuai bagi persamaan model kinetik multijalur.
4.1 Model Mikroskopik Jalur Tunggal
Model mikroskopik merupakan suatu model yang mendeskripsikan tingkah laku pengendara mobil secara individu pada berbagai macam situasi dalam berkendara di jalan raya. Pada model mikroskopik jalur tunggal diasumsikan terdapat M mobil dan xi(t) dinotasikan sebagai jarak mobil di posisi ke-i dari titik awal pada waktu t, dengan i=1,...,M . Diasumsikan masing-masing mobil memiliki panjang P dengan massa m, dan dipenuhi urutan x1>x2>...>xM.
Kecepatan dari mobil pada posisi ke-i adalah vi(t)=x′i(t), dengan xi′(t) dinotasikan sebagai turunan xi(t) terhadap waktu t.
Misalkan setiap pengendara memiliki waktu reaksi τ dan diasumsikan bahwa waktu reaksi tersebut identik untuk setiap pengendara. Misalkan Fbi(t) adalah gaya pengereman dari mobil yang didefinisikan sebagai
=
) (t
Fbi (massa)(akselerasi) = mxi′′(t+τ),
dengan m adalah massa mobil dan xi′′(t+τ) adalah perlambatan dari mobil ke-i
pada waktu tunda t+τ . Besarnya gaya pengereman tersebut bergantung pada kecepatan relatif dan jarak relatif terhadap mobil di posisi ke-i−1. Diasumsikan bahwa gaya pengereman secara langsung proporsional terhadap kecepatan relatif, dan kebalikannya proporsional terhadap jarak relatif. Jadi, gaya pengereman dari mobil diberikan oleh persamaan berikut:
) ( ) (
) ( ) ( )
( ) (
1 1
t x t x
t x t x A t
x m t F
i i
i i i
bi
− −
− ′ − ′ = + ′′
= τ ,
dengan xi(t)−xi−1(t) adalah jarak relatif antara mobil ke-i dengan mobil ke-i−1, dan A adalah konstanta positif. Jika λ =A/m, maka akselerasi menjadi
) ( ) ( ln )
( )
( x t x 1 t
dt d t
v t
xi′′ +τ = ′i +τ =λ i − i− .
Dengan mengintegralkan persamaan tersebut akan diperoleh kecepatan mobil ke-i
i i
i i
i t x t x t x t
v( +τ)= ′( +τ)=λln ( )− −1( )+α , (4.1.1) yang berlaku untuk i=2,3,...,M. Persamaan (4.1.1) tidak berlaku untuk i=1, karena mobil di posisi paling depan tidak dipengaruhi oleh mobil lainnya.
4.1.1 Kepadatan dan Kecepatan Mobil pada Kondisi Ekuilibrium
Kondisi ekuilibrium pada fenomena lalu lintas telah didefinisikan sebelumnya pada subbab 2.6, yaitu suatu kondisi pada jalan raya di mana setiap mobil berjarak sama terhadap mobil di posisi depan, dan setiap mobil juga bergerak dengan kecepatan yang sama. Salah satu contoh dari kondisi ekuilibrium tersebut yaitu pada kondisi di mana mobil melalui suatu terowongan dan kecepatan setiap mobil akan berkurang seiring peningkatan kepadatan mobil yang melalui terowongan tersebut. Untuk memperoleh definisi yang sesuai mengenai kepadatan mobil pada kondisi tersebut, dipertimbangkan terdapat suatu interval dengan panjang 2ε dan ε >0, yang relatif besar terhadap P tetapi relatif kecil terhadap skala makroskopik dari jalan raya. Kepadatan mobil di suatu titik xo
pada waktu t dinotasikan dengan ρ(xo,t), yaitu
ε
ρ ε ε
2 )
,
( o n((xo ,xo ),t)
t
x = − + , (4.1.2)
dengan n((xo−ε,xo+ε),t) adalah banyaknya mobil di interval (xo−ε,xo+ε) pada waktu t. Pada kondisi ekuilibrium, diasumsikan terdapat sebuah mobil di interval sepanjang xi−xi−1 , sehingga persamaan (4.1.2) dapat dinyatakan sebagai
1 1
−
− =
i
i x
x
ρ .
Kepadatan maksimum, yaitu ρmaxakan diperoleh jika jarak relatif antara mobil ke-i dengan mobil ke-i−1 sepanjang P, sehingga ρmax =1/P.
Diasumsikan bahwa kecepatan hanya bergantung pada kepadatan, yaitu ))
, ( ( ) ,
(xt v xt
v = ρ . Terdapat kepadatan kritis yang dapat diamati yaitu ρcrit, sedemikian sehingga vρ adalah kecepatan maksimum untuk kepadatan di interval
crit
ρ ρ ≤ ≤
kepadatan kritis dan seluruh mobil akan berhenti bersama-sama ketika mencapai kepadatan maksimum, sehingga v(ρmax)=0.
Sasaran selanjutnya adalah menentukan v(ρ) untuk ρ >ρcrit. Kepadatan maksimum akan dicapai ketika jarak antarmobil adalah sepanjang ruang yang tersisa pada saat bemper depan mobil berhimpit dengan bemper belakang mobil di posisi depan, dan setiap mobil tidak bergerak lagi. Banyaknya mobil pada interval
) ,
(zo−ε zo+ε tidak lebih besar dari 2ε/P. Oleh karena itu, dengan
menggunakan persamaan (4.1.2) diperoleh
P P
1 2
1 2
max ⎟=
⎠ ⎞ ⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ =
ε ε
ρ . (4.1.3)
Jika terjadi suatu kondisi dengan setiap mobil bergerak dengan kecepatan v, jarak antarmobil adalah d, dan jika setiap mobil memiliki panjang P, maka
P d+
= 1
ρ , d,P>0. (4.1.4)
Pada kondisi ekuilibrium setiap mobil akan bergerak dengan kecepatan yang sama dan oleh karena itu tidak akan bergantung pada i. Dari persamaan (4.1.1) akan diperoleh
α λ
α
λ + + = + +
= ln(d P) ln(d P)
v i ,
dengan d+P adalah jarak relatif antara dua mobil di depan dengan posisi berurutan, dan αi juga harus bebas dari i dan diganti oleh α. Dengan menggunakan persamaan (4.1.4) akan diperoleh
α ρ λ ⎟⎟+
⎠ ⎞ ⎜⎜ ⎝ ⎛
= ln 1
v , (4.1.5)
dengan λ dan α adalah parameter. Nilai parameter α ditentukan dari 0
) (ρmax =
v . Dengan mengatur agar nilai ρ =ρmax pada persamaan (4.1.5), akan diperoleh
0 1
ln ) (
max
max ⎟⎟+ =
⎠ ⎞ ⎜⎜ ⎝ ⎛
= α
ρ λ ρ
v
(
)
1 maxln −
− =
⇔α λ ρ
Sebagai akibatnya persamaan (4.1.5) menjadi
( ) ln 1 λln(ρmax)
ρ λ ρ ⎟⎟+ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = v , ln ) ln (ln max max ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = − = ρ ρ λ ρ ρ λ (4.1.6)
untuk ρ >ρcrit. Lebih lanjut, v(ρ) akan kontinu pada ρ =ρcrit. Dengan mengatur
crit
ρ
ρ = akan diperoleh kecepatan maksimum yang dinotasikan vmax, yaitu
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = = crit crit v v ρ ρ λ ρ max
max ( ) ln ,
sehingga diperoleh ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = crit v ρ ρ λ max max ln .
Substitusikan λ pada persamaan (4.1.6) akan diperoleh 1 max max
maxln ln
) ( − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = crit v v ρ ρ ρ ρ ρ ,
yang pada akhirnya akan diperoleh
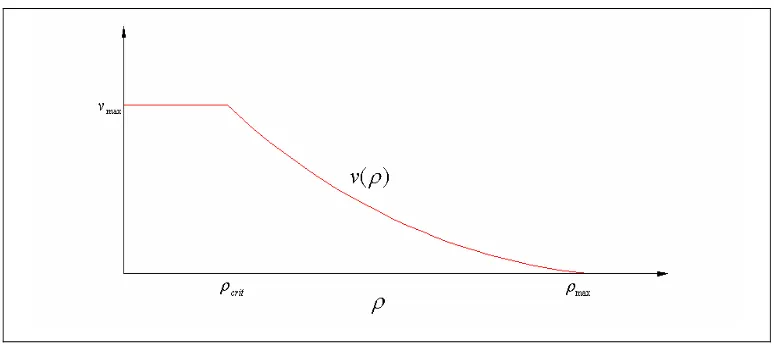
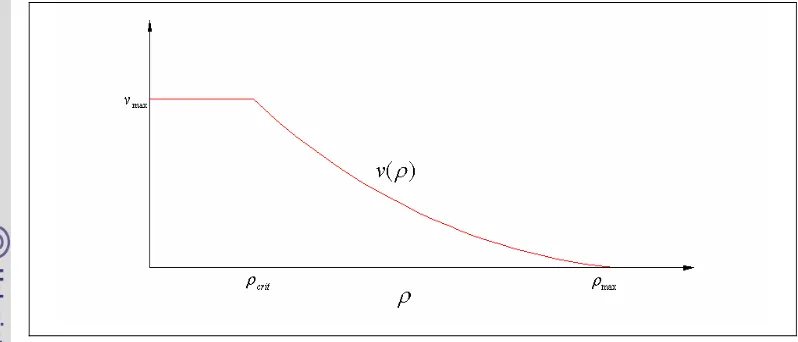
⎪ ⎩ ⎪ ⎨ ⎧ > ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ≤ ≤ = − crit crit v v v ρ ρ ρ ρ ρ ρ ρ ρ ρ untuk , ln ln 0 untuk , ) ( 1 max max max crit max (4.1.7)
Perlu diperhatikan bahwa kecepatan bernilai konstan sampai dicapai kepadatan kritis ρcrit, kemudian kecepatan akan menurun secara logaritmik sebagaimana
Gambar 4.1 Plot antara kecepatan dengan kepadatan.
4.1.2 Arus Lalu Lintas Maksimum pada Kondisi Ekuilibrium
Dari subbab 2.2, arus lalu lintas dinotasikan oleh j(x,t). Dengan asumsi bahwa arus lalu lintas juga hanya bergantung pada kepadatan, j(x,t) dapat dinyatakan oleh j(x,t)= j(ρ(x,t)). Arus lalu lintas adalah banyaknya mobil yang melalui titik yang diberikan per unit waktu, yaitu
) ( waktu jarak jarak mobil banyaknya )
(ρ ρ v ρ
j ⎟=
⎠ ⎞ ⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = .
Hubungan antara kecepatan dengan kepadatan yang diperoleh dari kondisi ekuilibrium pada persamaan (4.1.7) didefinisikan sebagai
⎪ ⎩ ⎪ ⎨ ⎧ > ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ≤ ≤ = − . untuk , ln ln 0 untuk , ) ( 1 max max max crit max crit crit v v j ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ (4.1.8)
Dengan mendiferensialkan persamaan (4.1.8) dapat ditentukan nilai maksimum arus lalu lintas. Untuk ρ >ρcritakan diperoleh
1 max max
maxln ln
) ( − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = crit v j ρ ρ ρ ρ ρ ρ
ln (ln max ln ) 1
max
max ρ ρ ρ
), ln( ln ln ) ln( 1 max max 1 max max
max ρ ρ
ρ ρ ρ ρ ρ ρ − − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = crit crit v v
sehingga turunan j(ρ) terhadap ρ adalah
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = ′ − − − ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ
ρ) ln( ) ln ln ln( ) ln 1
( 1 max max 1 max max 1 max max max crit crit crit v v v j
[
]
[
]
. 1 ln ln 1 ) ln( ) ln( ln 1 ) ln( ln ln ) ln( max 1 max max max 1 max max 1 max max 1 max max max ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = − − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = − − − − ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ crit crit crit crit v v v vSelanjutnya dengan membuat persamaan tersebut bernilai sama dengan nol, akan diperoleh 0 1 ln ln max 1 max
max ⎥=
⎦ ⎤ ⎢ ⎣ ⎡ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ρ ρ ρ ρ crit v .
Oleh karena vmax>0, persamaan tersebut dapat bernilai nol jika dan hanya jika 1
) ln( )
ln(ρmax − ρ = , sehingga
exp ⎟⎟=
⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ρ ρmax
ln exp
( )
1e
max
ρ ρ=
⇔ .
Oleh karena itu solusi dari ρ hanya dapat diperoleh jika terjadi
e
opt ρmax/
ρ
ρ = = .
Jika ρopt >ρcrit, maka arus lalu lintas maksimum dapat terjadi pada ρopt. Jika ρopt ≤ρcrit, maka arus lalu lintas maksimum akan terjadi pada ρcrit. Hal ini dikarenakan untuk setiap 0≤ρ≤ρcrit, j′(ρ)=vmax >0. Jadi j meningkat pada interval tersebut dan mencapai maksimum pada titik terakhir di sebelah kanan.
kepadatan kritis di dua lokasi yang berbeda akan berlainan. Tetapi disarankan untuk setiap kasus yang berbeda agar dipenuhi ρcrit <ρmax/e.
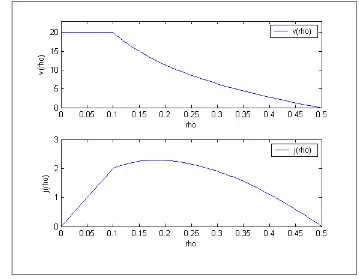
[image:47.612.126.515.118.286.2]
Gambar 4.2 Plot antara arus dengan kepadatan.
4.2 Model Mikroskopik Multijalur
Axel Klar dan Raimund Wegener (1998) mengemukakan bahwa pada model mikroskopik biasanya perhatian ditujukan pada respons aktual suatu mobil terhadap mobil di posisi depannya. Diasumsikan bahwa pengendara akan mengubah kecepatan mobil yang dikendarai sebagai respons terhadap tingkah laku mobil di posisi depan. Lebih lanjut, mobil akan berpindah jalur secara spontan dan sesekali melewati ambang batas. Ambang batas biasanya bergantung pada kecepatan mobil itu sendiri. Selama tidak ada ambang batas yang dilewati, mobil bergerak pada kecepatan masing-masing dengan gerakan bebas.
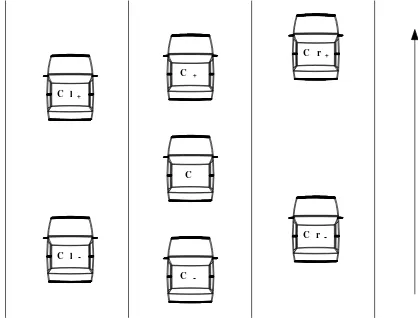
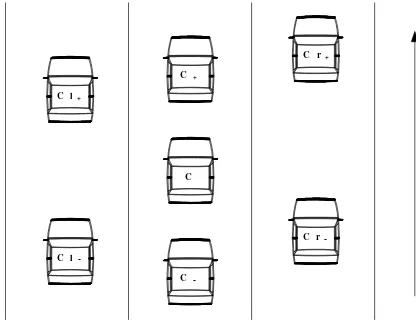
Gambar 4.3 Skema posisi mobil pada jalan raya.
-C r C l
-C
+ C r +
C C l+
[image:47.612.210.419.515.674.2]Pada model mikroskopik multijalur diasumsikan terdapat N jalur pada jalan raya. Mobil yang diamati dinotasikan dengan c. Kemudian mobil di posisi depan dan belakang berturut-turut dinotasikan oleh c+ dan c−. Pada jalur kanan dan kiri dinotasikan cr+, cr− dan cl+, cl−. Kecepatan sebelum dan sesudah terjadi
interaksi berturut-turut dinotasikan oleh v dan v′. Kecepatan mobil nilainya berkisar dari 0 sampai dengan w, dengan w adalah kecepatan maksimum mobil.
Didefinisikan H0 adalah jarak minimum antarmobil. Ambang batas untuk perpindahan ke jalur kanan dinotasikan dengan HR, ambang batas untuk perpindahan ke jalur kiri adalah HL, ambang batas untuk pengereman adalah HB, ambang batas untuk akselerasi adalah HA, dan ambang batas untuk bebas berkendara dinotasikan dengan HF, yang masing-masing didefinisikan sebagai
R
R v H vT
H ( )= 0+
L
L v H vT
H ( )= 0+
B
B v H vT
H ( )= 0+
A
A v H vT
H ( )= 0+δ +
F
F H wT
H = 0+δ + .
F A B L
R T T T T
T , , , , berturut-turut menotasikan waktu reaksi dari masing-masing interaksi dan δ menotasikan suatu konstanta positif. Interaksi yang mungkin terjadi adalah sebagai berikut:
1. Perpindahan ke jalur kanan
Ruang yang diperlukan pada jalur kanan untuk melakukan perubahan posisi mobil dinotasikan oleh S
R S
R v H vT
H ( )= 0+ , dengan TRS dinotasikan
sebagai waktu reaksi ketika mobil sudah berada di jalur kanan. Jika v>v+
dan HR(v) dilalui, maka mobil akan berpindah ke jalur kanan hanya jika terdapat ruang yang cukup pada jalur kanan, yaitu jika:
) (v H x
x S
R
r+ − > dan _ ( r_)
S R
r H v
x
x− > .
⎩ ⎨
⎧ − >
=
′ +
selainnya ,
jika , ~
v
H x x v
v r F
⎩ ⎨
⎧ − >
= ′
−
− + −
−
selainnya ,
jika , ~
v
H x x v
v F
dengan v~,v~− disebarkan berdasarkan sebaran peluang dari kecepatan yang diinginkan pengendara dengan fungsi kepekatan peluang fD. Dipilih
) (
~ 1
ξ
−
=FD
v , dengan ξ adalah peubah acak yang menyebar seragam pada selang (0,1) dan FD v =
∫
vfD v dv0 (ˆ) ˆ )
( .
2. Perpindahan ke jalur kiri
Ruang yang diperlukan pada jalur kiri untuk melakukan perubahan posisi
mobil dinotasikan oleh S
L S
L v H vT
H ( )= 0+ , dengan S L
T dinotasikan sebagai waktu reaksi ketika mobil sudah berada di jalur kiri. Jika v− >v
dan HL(v−) dilalui, maka mobil akan berpindah ke jalur kiri hanya jika terdapat ruang yang cukup di jalur kiri, yaitu jika:
) (v H x
xl+ − > LS dan _ S( l_)
L
l H v
x
x− > .
Lebih lanjut c dan c− akan berakselerasi setelah terjadi perpindahan jalur, dan kecepatan yang baru adalah
⎩ ⎨
⎧ − >
=
′ +
selainnya ,
jika , ~
v
H x x v
v l F
⎩ ⎨
⎧ − >
= ′
−
− + −
−
selainnya ,
jika , ~
v
H x x v
v F
dengan v~,v~− disebarkan berdasarkan sebaran peluang dari kecepatan yang diinginkan pengendara dengan fungsi kepekatan peluang fD. Dipilih
) ( ~= −1 ξ
D
F
v , dengan ξ adalah peubah acak yang menyebar seragam pada selang (0,1) dan FD v =
∫
vfD v dv0 (ˆ) ˆ )
( .
3. Pengereman
Jika v>v+ dan ambang batas pengereman HB(v) dilewati, maka akan terjadi pengereman pada interval kecepatan
[
βv,v]
di bawah kecepatan aktual v. Kecepatan yang baru didefinisikan sebagai) (v v v
dengan ξ menyebar seragam pada interval [0, 1]. Pengereman dibatasi oleh suatu kondisi di mana akselerasi masih memungkinkan terjadi lagi, yaitu untuk setiap v,v′ dibutuhkan HA(v′)>HB(v), sehingga
B
A H vT
T v
H0+δ + ′ > 0+
A
B vT
T
v − < ′
⇔ δ
) (v v v
T T
T v
A A
B − δ <β +ξ −β
⇔ .
dipilih v = w, sehingga
) (w w w
T T
T w
A A
B − δ <β +ξ −β
[
β ξ(1 β)]
δ < + −
−
⇔ w
T T
T w
A A
B
) 1 ( β
ξ β
δ < + −
− ⇔
A A B
T w T T
. Untuk ξ =0 diperoleh
β δ <
− A A B
T w T T
, dan untuk ξ =1 diperoleh
1
< −
A A B
T w T
T δ
,
sehingga untuk ξ∈
[ ]
0,1 berlaku. 1
< <
− δ β
A A B
T w T T
4. Akselerasi I (pengikut)
Jika v<v+ dan ambang batas akselerasi HA(v)dilewati, maka mobil akan berakselerasi pada interval kecepatan
[
v,αv]
di atas kecepatan aktual v. Persamaan kecepatan yang baru didefinisikan sebagai) ) ,
(min(wv v v
v′= +ξ α − , α>1.
Akselerasi dibatasi oleh kondisi di mana pengereman masih memungkinkan untuk dilakukan, yaitu untuk setiap v, dibutuhkan v′
) ( )
(v H v
A
B H vT
T v
H0+ ′ < 0+δ +
A
B vT
T v′ < +
⇔ δ
[
]
B A
B T
T v T v v w
v+ − < +
⇔ ξ min( , α) δ .
dipilih v = w, sehingga
[
]
B A
B T
T w T w w w
w+ξ min( , α)− < δ +
[
]
B A
B T
T T w w
w w
w − < +
+
⇔1 ξ min( , α) δ
Untuk 0ξ = diperoleh
B A
B T
T T
w +
< δ
1 .
Untuk 1ξ = diperoleh
[
]
B A
B T
T T w w
w w
w − < +
+ min( , α) δ
1 ,
jika w<wα, maka
[
]
B A
B T
T T w w
w w
+ < −
+ δ
1
B A
B T
T T
w +
<
⇔1 δ ,
dan jika wα <w, maka
[
]
B A
B T
T T w w
w
w − < +
+ α δ
1
(
)
B A
B T
T T
w +
< − +
⇔1 α 1 δ
B A
B T
T T
w +
<
⇔α δ ,
sehingga untuk ξ∈
[ ]
0,1 berlakuB A
B T
T T
w +
<
<α δ
5. Akselerasi II (bebas berkendara)
Jika v<v+ dan ambang batas akselerasi HF(v) dilewati, maka mobil akan
berakselerasi dan bergerak bebas dengan kecepatan yang diinginkan. Kecepatan yang baru yaitu v′ (kecepatan yang diinginkan) disebarkan berdasarkan fungsi sebaran dengan fungsi kepekatan fD, yaitu
) ( 1ξ
−
=
′ FD
v ,
dan FDsebagaimana sebelumnya.
Dari kelima interaksi diasumsikan terjadi urutan berikut:
B L R A
F T T T T
T ≥ > > > dan S B L S
R T T
T , ≥ . Dengan kata lain, pengereman memerlukan jarak aman yang paling minimum, sedangkan akselerasi pada jarak yang lebih jauh. Untuk mengubah posisi mobil, ruang yang diperlukan sekurang-kurangnya sedemikian sehingga masih memungkinkan bagi pengendara mobil untuk melakukan pengereman.
Untuk memperoleh persamaan kinetik multijalur, akan digunakan model mikroskopik yang sederhana, yaitu tanpa adanya syarat akselerasi tambahan pada interaksi perpindahan jalur. Setelah mencapai ambang batas pengereman, pengendara akan berusaha untuk berpindah ke jalur kanan, jika hal tersebut tidak memungkinkan maka mobil yang berada di posisi depan akan berusaha untuk berpindah ke jalur kiri, dan jika perpindahan jalur tidak memungkinkan juga untuk dilakukan, pengendara akan mengerem mobil yang dikendarai.
4.3 Model Kinetik
4.3.1 Pendekatan dari Sebaran Mobil di Posisi Depan
Klar & Wegener (1998) mengatakan bahwa kuantitas dasar pada pendekatan kinetik adalah fungsi sebaran untuk mobil tunggal dan sebaran mobil di posisi depan pada masing-masing jalur. Fungsi sebaran untuk mobil tunggal dinotasikan oleh )fα(x,v yang mendeskripsikan banyaknya mobil di posisi x dengan kecepatan v pada jalur α. Sebaran mobil di posisi depan dinotasikan oleh
) , , , ( ) 2
( x v h v+
fα yang mendeskripsikan banyaknya pasangan mobil di posisi x
dengan kecepatan v dan mobil di depannya pada posisi x+h dengan kecepatan
+
mengenai kebergantungan aspek waktu. fα(x,v) dapat diperoleh dengan mengintegralkan fα(2)terhadap h dan v+, yaitu
∫∫
∞ + + = w dv dh v h v x f v x f 0 0 ) 2 ( ( , , , ) ) , ( αα . (4.3.1)
Kepadatan mobil di posisi x pada jalur α dinotasikan oleh ρα(x), yaitu
∫
=wf xv dv
x 0 ) , ( ) ( α α ρ ,
sehingga ( ) ( , , , ) .
0 0 0 ) 2 (
∫∫∫
∞ + + = w w dv dv dh v h v x f x α α ρ (4.3.2)Selanjutnya, rata-rata ruang yang tersedia untuk masing-masing mobil di jalur α adalah
α
ρ
1
, yang didefinisikan sebagai
) ( 1 ) , , , ( ) , , , (
0 0 0 ) 2 ( 0 0 0
) 2 ( x dv dv dh v h v x f dv dv dh v h v x f h w w w w α α α ρ =
∫∫∫
∫∫∫
∞ + + ∞ + +, (4.3.3)
sehingga
∫∫∫
∞ + + = w w dv dv dh v h v x f h
0 0 0 ) 2
( ( , , , ) 1
α . (4.3.4)
Persamaan kinetik untuk fungsi sebaran fα menggunakan sebaran mobil di posisi depan yaitu fα(2) untuk menjelaskan pengaruh dari interaksi yang terjadi. Untuk memperoleh persamaan tertutup dari fα, harus diperoleh pendekatan dari sebaran mobil yang berada di posisi depan fα(2) dengan cara yang sesuai yaitu dengan menggunakan fα dan fungsi korelasi. Hubungan antara fα(2) dan fα dapat dijelaskan sebagai berikut:
) , ( ) ( ) ,
(x v x F xv
fα = ρα α (4.3.5)
) , ( ) , ; ( ) , , ; ( ) , , , ( ) 2
( x v h v F v h v x Q h v x f x v
fα + = α+ + α α (4.3.6)
dengan ) , (xv
Fα = sebaran peluang dari mobil di posisi x dengan kecepatan v; )
, , ; (v h v x
depan dengan jarak h terhadap mobil di posisi x dengan kecepatan v;
) , ; (h v x
Qα = sebaran peluang dari mobil di posisi depan pada jarak h
terhadap mobil di posisi x dengan kecepatan v.
Diasumsikan bahwa mobil di posisi depan disebarkan berdasarkan sebaran peluang Fα pada x+h, yaitu
) , ( ) , , ; ( + + + = + v h x F x v h v
Fα α .
Untuk Qαdidefinisikan
,.)) ( , ; ( ) , ;
(h v x q h v f x
Qα = α .
Dalam hal ini q(h;v,f) adalah sebaran dari mobil di posisi depan yang berjarak h
dari mobil dengan kecepatan v dan diasumsikan bahwa kecepatan mobil disebarkan berdasarkan fungsi sebaran f .
Selanjutnya dari persamaan sebelumnya diketahui bahwa ) ( ) , ( 0 h x dv v h x f w + = +
∫
α + + ρα , sehingga dengan menyubstitusi persamaan (4.3.5)