Oleh :
AGRIANSYAH
NIM. 2013 301 0005
PROGRAM STUDI DIPLOMA III TEKNIK ELEKTROMEDIK
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
i
Ditunjukan Kepada Universitas Muhammadiyah Yogyakarta Untuk Memenuhi Sebagian Persyaratan Guna Memperoleh Gelar Ahli Madya (A.Md)
Program Studi Teknik Elektromedik
Oleh :
AGRIANSYAH
NIM. 2013 301 0005
PROGRAM STUDI DIPLOMA III TEKNIK ELEKTROMEDIK
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
ii
untuk memperoleh derajat profesi ahli madya atau gelar kesarjanaan pada suatu perguruan tinggi dan
sepanjang pengetahuan penulis tidak terdapat pendapat yang pernah ditulis atau diterbitkan orang lain,
kecuali yang secara tertulis diacu dalam naskah ini serta disebutkan dalam daftar pustaka.
Yogyakarta, 02 Desember 2016
Yang menyatakan,
Agriansyah
hidayah-Nya, sehingga penulis dapat menyelesaikan Karya Tulis Ilmiah ini dengan baik dan lancar. Karya Tulis Ilmiah yang berjudul “ Centrifuge Berbasis Mikrokontroller dengan tampilan waktu” ini diajukan sebagai salah satu syarat
untuk mendapatkan gelar Ahli Madya Teknik Elektromedik di Politeknik Muhammadiyah Yogyakarta.
Keberhasilan dalam penyusunan karya tulis ilmiah ini adalah berkat bantuan dari semua pihak. Untuk itu dalam kesempatan ini penulis mengucapkan terima kasih kepada pihak-pihak yang mempunyai andil besar dalam penyusunan kaarya tulis ilmiah ini, terutama kepada :
1. Kedua orang tua kami yang telah memberikan do’a, motivasi dan dukungan dalam penyusunan karya tulis ilmiah.
2. Dr. Sukamta, S.T.,M.T. Selaku Direktur Vokasi Politeknik Muhammadiyah Yogyakarta.
3. Tatiya Padang Tunggal, S.T. Selaku Ketua Program Studi Teknik Elektromedik
4. Kuat supriyadi, BE, S.E., S.T., M.M. Selaku Dosen Pembimbing Modul Tugas Akhir.
5. Bapak/Ibu Dosen Teknik Elektromedik Universitas Muhammadiyah Yogyakarta yang telah memberikan masukan serta kritik dan saran kepada penulis dalam menyelesaikan tugas akhir ini.
6. Sakila yang telah memberikan do’a, semangat dan selalu mengingatkan penulis sholat 5 waktu agar diberikan kemudahan dalam mengerjakan tugas akhir oleh Allah SWT.
10.Terimakasih kepada teman-teman yaitu Iking, Mas Ahmad, Mas Tiar, Mas Wisnu, Mas Latif, Amha, Zaki, Galih, Tantoni, Sodiqin dan Rizki yang telah membantu dan menemani penulis dalam mengerjakan modul ini.
Penulis menyadari bahwa penyusunan karya tulis ilmiah ini tentu saja masih jauh dari sempurna dan banyak terdapat kekurangan, oleh karena itu dengan segala kerendahan hati penulis menerima saran dan kritik untuk kesempurnaan karya tulis ilmiah ini. Harapan penulis semoga karya tulis ilmiah ini dapat memberikan manfaat bagi pembaca khususnya dan menambah ilmu pengetahuan pada umumnya.
Yogyakarta, 18 Agustus 2016
vii
LEMBAR PERNYATAAN ... ii
LEMBAR PERSETUJUAN ... iii
LEMBAR PENGESAHAN ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vi
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xi
ABSTRAK ... xii
ABSTRAC ... xiii
BAB I PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 2
1.3. Batasan Masalah... 2
1.4. Tujuan ... 2
1.4.1. Tujuan Umum ... 2
1.4.2. Tujuan Khusus ... 3
viii
TINJAUAN PUSTAKA
2.1. Dasar Teori ... 4
2.1.2. Tinjauan Alat ... 7
2.2. Liquid Crystal Display (LCD) ... 7
2.3. Solid State Relay (SSR) ... 9
2.4. Triac ... 11
2.5. Optocoupler ... 12
2.6. Mikrokontroller ATMEGA8 ... 13
2.6.1. PORT B ... 14
2.6.2. PORT C ... 15
2.6.3. PORT D ... 16
2.7. Motor ... 17
2.8. Buzzer ... 18
BAB III METODALOGI PENELITIAN 3.1. Alat dan Bahan ... 20
3.2.Diagram Blok Sistem ... 21
ix
3.7. Rangkaian Minimum Sistem ... 25
3.8. Rangkaian Keseluruhan ... 27
3.9. Program ... 28
3.6. Perancangan Pengujian ... 34
3.6.1. Jenis Pengujian ... 34
3.6.2. Pengolahan Data ... 34
3.7. Variabel Penelitian ... 34
3.7.1. Variabel Bebas ... 34
3.7.2. Variabel Tergantung ... 34
3.7.3. Variabel Terkendali ... 34
3.8. Sistematika Pengukuran ... 34
BAB IV 4.1. Spesifikasi Alat ... 37
4.2. Modul Alat Tugas Akhir dan Alat yang Sudah Ada ... 37
4.3. Pengukuran Waktu ... 38
4.4.1. Pengukuran Timer Dengan Waktyu 5 Menit ... 38
4.4.2. Pengukuran Timer Dengan Waktyu 10 Menit ... 42
x
PENUTUP
Gambar 2.2. Centrifuge High Speed ... 6
Gambar 2.3. CentrifugeUltra ... 6
Gambar 2.4. Liquid Cristal Display (LCD) ... 8
Gambar 2.5. Solid State Relay (SSR) ... 9
Gambar 2.6. Rangkaian Triac ... 11
Gambar 2.7. Optocoupler ... 12
Gambar 2.8. Sensor Optocoupler ... 13
Gambar 2.9. ATMega8 ... 13
Gambar 2.10. Motor AC ... 18
Gambar 2.11. Buzzer ... 19
Gambar 3.1. Diagram Blok ... 21
Gambar 3.2. Diagram Alir ... 22
Gambar 3.3. Diagram Mekanis ... 23
Gambar 3.4. Skematik Power Supply ... 24
Gambar 3.5. Layout Power Supply ... 24
Gambar 3.6. Power Supply ... 25
Gambar 3.7. Skematik Minimum System ... 26
Gambar 3.8. Layout Minimum System ... 26
Gambar 3.9. Rangkaian Keseluruhan ... 27
Gambar 4.1. Modul Alat Tugas Akhir ... 37
Tabel 2.2 Pin Port B ... 14
Tabel 2.3 Pin PORT C ... 15
Tabel 2.4 Pin PORT D ... 17
Tabel 4.1 Pengukuran Waktu 5 Menit ... 39
Tabel 4.2 Pengukuran ke 2 Waktu 5 Menit ... 41
Tabel 4.3 Pengukuran Waktu 10 Menit ... 43
Tabel 4.4 Pengukuran ke 2 Waktu 10 Menit ... 45
Tabel 4.5 Pengukuran Waktu 15 Menit ... 47
xiii
Program Vokasi Universitas Muhammadiyah Yogyakarta Email: [email protected]
ABSTRAK
Centrifuge berbasis mikrokontroler ATMega8 dilengkapi dengan pengatur
waktu adalah alat yang digunakan untuk memisakan suatu senyawa yang
memiliki berat molekul yang berbeda dengan memanfaatkan gaya sentrifugal
menggunakan motor AC. Alat ini dilengkapi dengan kontrol timer, pemilihan
timer yang digunakan yaitu 5, 10 dan 15 menit.
Prinsip kerjanya, saat alat ini dinyalakan akan langsung memasuki
pemilihan timer 5, 10 dan 15 menit tergantung berapa lama waktu yang dipilih
dan cairan apa yang digunakan. Setelah pemilihan waktu tekan tombol enter.
Setelah waktu selesai maka motor akan berhenti.
xiv
Program Vokasi Universitas Muhammadiyah Yogyakarta Email: [email protected]
ABSTRAK
Centrifuge microcontroller based ATMega8 equipped with a timer is a tool used to separate compounds that have different molecular weights utilizing centrifugal force using Ac motors. This tool is equipped with a timer control, the selection of timer used are 5, 10 and 15 minutes is the threshold corresponding to the volume of fluid medications.
The principle works, when the appliance is turned on will directly enter the election timer 5, 10 and 15 minutes depending on how much time is selected and any liquid thatis used. After timing press the enter key. After the time is finished then the motor will stop.
PENDAHULUAN
1.1. LATAR BELAKANG
Dalam ilmu kesehatan, salah satu cara yang dilakukan dalam mendiagnosa suatu penyakit adalah dengan cara pemeriksaan urin dan darah. Akan tetapi, pemeriksaan dengan menggunakan urin dan darah ini tidak dapat dilakukan secara langsung, karena urin dan darah ini masih terdapat protein yang dapat mempengaruhi hasil pemeriksaan laboratorim. Oleh karena itu, sebelum dilakukan pemeriksaan terhadap urin dan darah terlebih dahulu dilakukan pemisahan protein yang terdapat dalam urin dan darah tersebut.
Salah satu alat yang banyak digunakan dalam melakukan pemisahan pada urin dan darah adalah centrifuge. Centrifuge adalah alat yang digunakan untuk memisahkan suatu senyawa yang memiliki berat molekul yang berbeda dengan memanfaatkan gaya sentrifugal. Prinsip kerja dari alat ini yaitu dengan memanfaatkan gaya sentrifugal yaitu gaya yang bekerja pada benda yang berputar dengan kecepatan yang telah ditentukan. kecepatan pada sentrifugal sangat berpengaruh pada pemisahan larutan dan hasil pengukuranya. Protein yang terkandung dalam urin dan darah memiliki molekul yang cukup besar sehingga ketika sampel urin dan darah ini diputar dengan menggunakan
centrifuge protein tersebut akan mengendap dan menyisakan cairan bening/jernih yang disebut dengan serum. Melalui cairan serum inilah dilakukan pendiagnosaan suatu penyakit.
Seiring dengan perkembangan teknologi pada saat ini terutama pada bidang elektronika dan di bidang kesehatan, maka akan berpengaruh pula pada bidang-bidang kesehatan lainnya. Namun, alat centrifuge yang ada masih berbasis manual dan
centrifuge berbasis mikrokontroller dengan harapan memberikan dampak positif, mengingat betapa pentingnya alat ini di laboratorium. Alat centrifuge berbasis mikrokontroller yang dibuat ini mengutamakan pada kecepatan dan waktu, agar hasil keakurasian didapat dalam pengukuran.
1.2. RUMUSAN MASALAH
Pengoperasian alat centrifuge yang masih manual dan memiliki harga yang relatif mahal sehingga diperlukan alat centrifuge yang dapat bekerja secara otomatis dan memiliki harga yang cukup terjangkau.
1.3. BATASAN MASALAH
Agar tidak terjadi pelebaran masalah dalam penulisan, maka penulis membatasi pokok permasalahan yang bersifat praktis.
1. Alat ini dikontrol pada kecepatan 1500-3000 Rpm. 2. Menggunakan kontrol waktu yaitu 5, 10, dan 15 menit. 3. Pengendali alat menggunakan mikrokontroller ATMega8.
1.4. TUJUAN
1.4.1. Tujuan Umum
Dibuat alat centrifuge dengan kecepatan 1500-3000 Rpm dan pewaktu.
1.4.2. Tujuan Khusus
1. Membuat rangkaian driver motor 2. Membuat rangkaian minimum sistem 3. Program ATMega8
elektromedik, khususnya di alat centrifuge.
1.5.2. Manfaat Praktis
BAB II
TINJAUAN PUSTAKA
1.2. LANDASAN TEORI
1.2.1. Dasar Teori
Centrifuge merupakan alat laboratorium yang berfungsi sebagai pemisah cairan atau senyawa yang kepadatanya serta berat molekulnya berbeda, cairan ini berupa darah, dan urine, alat ini memanfaatkan gaya centrifugal, yaitu gaya yang timbul akibat benda yang diputar dari satu titik sebagai porosnya . untuk memisahkan partikel dari satu benda cair. Besarnya gaya centrifugal tergantung dari besarnya jari-jari dari titk pusat dan kecepatan sudut yang timbul akibat putaran motor. Apabila putaran motor semakin tinggi maka semakin besar pula gaya centrifugal yang dihasilkan untuk mendapatkan hasil yang diinginkan dengan sempurna tanpa merusak sampel digunakan kecepatan yang sesuaidengan kebutuhan.
Adapun untuk memutar urin dengan memerlukan kecepatan 1500-2000 Rpm membutuhkan waktu 10 menit dengan sampel sebanyak kurang lebih 2-3 ml, untuk darah dengan kecepatan 2500-3000 Rpm membutuhkan waktu 10 menit dengan sampel sebanyak 3-5 ml. [14]
Centrifuge mempunyai berbagai macam jenis, secara garis besar mempunyai 3 macam jenis yaitu :
1. Centrifuge low speed (Centrifuge yang mempunyai kecepatan maksimum 10.000 Rpm).
Centrifugesederhana ini kecepatan yang digunakan tidak terlalu besar, sehingga pada centrifuge ini jarang dilengkapi pendingin.centrifuge sederhana ini biasanya digunakan untuk memisahkan sampel seperti darah dan urine karena dengan kecepatan yang tidak terlalu besar sampel-sampel tersebut sudah bisa dipisahkan.
contohnya
Gambar 2.1. Centrifuge [9]
Centrifuge yang penulis buat dalam tugas akhir ini tergolong dalam centrifuge sederhana karena kecepatanya hanya sampai 3000 Rpm.
diputar tidak terpengaruh lebih-lebih pada cairan yang hanya stabil pada temperatur rendah karena pada centrifuge high speed, suhu dalam cairan akan naik akibat gesekan.
Gambar 2.2. Centrifuge High Speed [9]
3. Centrifuge ultra ( kecepatannya mencapai 30.000-120.000 Rpm)
Centrifuge ultra ini kecepatanya sangat tinggi sehingga bagian-bagian sebuah sel yang kecilpun, misalnya seperti intisel dan ribosom dapat dipisahkan. Kecepatan dapat ditingkatkan perlahan-lahan dengan sebuah kontaktor. Hal ini mencegah terjadinya motor hangus dan mencegah aus pada bantalan poros.
2.1.2. Tinjauan Alat
Centrifuge yang dijual oleh pasar mempunyai kekurangan yaitu masalah harga alat yang mahal, sedangkan yang di buat peneliti dan penulis membutuhkan modal yang tidak terlalu banyak.
Alat centrifuge yang sudah ada masih berbasis manual, sedangkan centrifuge pernah di buat oleh wahyu hidayat sebagai peneliti menggunakan ATMega16 dan yang di buat oleh agriansyah sebagai penulis menggunakan ATMega8 untuk port pada ATMega8 sudah cukup karena digunakan untuk LCD, push buton, sensor dan
buzzer, ATMega8 juga lebih murah dari ATMega16. Penggunaan motor dan driver motor juga berbeda, penulis menggunakan motor mesin jahit dan menggunakan Solid State Relay (SSR) sebagai driver motor. [4]
2.2. LCD (Liquid Cristal Display)
LCD adalah salah satu jenis teknologi yang telah ada sejak tahun 1888. LCD merupakan layar digital yang dapat menampilkan nilai yang dihasilkan oleh sensor dan dapat menampilkan menu yang terdapat pada aplikasi yang bernama mikrokontroler dan juga dapat menampilkan teks.
Rangkaian LCD pada umumnya di buat dengan menggunakan sistem komunikasi jenis parallel. Dalam hal ini tentunya akan banyak port
mikrokontroler. Ada beberapa bagian dari rangkaian LCD yang sangat berfungsi. LCD dapat dilihat di gambar 2.4.
Gambar 2.4. Liquid Cristal Display (LCD) [10] Tabel 2.1. Pin dan Fungsi LCD
PIN NAMA FUNGSI
1 Vss Ground Voltage
2 Vcc +5V
3 Vee Contrast Voltage
4 RS
Register Select
0 = Instruction Register
I = Data Register
5 R/W
Read / Write
0 = Write Mode
I = Read Mode
6 E
Enable
0 = Start to lacht dat to LCD character
I = disable
7 DBO LSB
8 DB1 -
9 DB2 -
10 DB3 -
11 DB4 -
12 DB5 -
13 DB6 -
14 DB7 MSB
15 BPL Back Plane Light
2.3. Solid State Relay(SSR)
Pengertian dan fungsi solid state relay sebenarnya sama saja dengan relay elektromekanik yaitu sebagai saklar elektronik yang biasa digunakan atau diaplikasikan di industri-industri sebagai device pengendali. Namun relay elektro mekanik memiliki banyak keterbatasan bila dibandingkan dengan solid state relay, salah satunya seperti siklus hidup kontak yang terbatas, mengambil banyak ruang, dan besarnya daya kontaktor
relay. Karena keterbatasan ini, banyak produsen relay menawarkan perangkat solid staterelay dengan semikonduktor modern yang menggunakan SCR, TRIAC, atau output transistor sebagai pengganti saklar kontak mekanik.
Output device (SCR, TRIAC, atau transistor) adalah optikal yang digabungkan sumber cahaya LED yang berada dalam relay. Relay akan dihidupkan dengan energi LED ini, biasanya dengan tegangan power DC yang rendah. Isolasi optik antara input dan output inilah yang menjadi kelebihan yang ditawarkan oleh solid state relay bila dibanding relay elektromekanik. SSR dapat dilihat di gambar.
Solid state relay itu juga berarti relay yang tidak mempunyai bagian yang bergerak sehingga tidak terjadi aus. Solid state relay juga mampu menghidupkan dan mematikan dengan waktu yang jauh lebih cepat bila dibandingkan dengan relay elektromekanik. Juga tidak ada pemicu percikan api antar kontak sehingga tidak ada masalah korosi kontak. Namun solid state relay masih terlalu mahal untuk dibuat dengan rating arus yang sangat tinggi. Sehingga, kontaktor elektromekanik atau relay konvensional masih terus mendominasi aplikasi-aplikasi di industri saat ini.
Salah satu keuntungan atau kelebihan yang signifikan dari solid state relay SCR dan TRIAC adalah kecenderungan secara alami untuk membuka sirkuit AC hanya pada titik nol arus beban. Karena SCR dan TRIAC
adalah thyristor, dengan sifat hysteresisnya mereka mempertahankan kontinuitas sirkuit setelah LED de-energized sampai saat AC turun dibawah nilai ambang batas (holding current). Secara praktis apa artinya semua ini, artinya adalah rangkaian tidak akan pernah terputus ditengah-tengah puncak gelombang sinus. Waktu pemutusan seperti yang ada dalam rangkaian yang mengandung induktansi besar biasanya akan menghasilkan lonjakan tegangan besar karena runtuhnya medan magnet secara tiba-tiba di sekitar induktansi. Hal seperti ini tidak akan terjadi saat pemutusan dilakukan oleh sebuah SCR
atau TRIAC. Kelebihan fitur ini disebut zero-crossover switching.
Salah satu kelemahan dari solid state relay adalah kecenderungan mereka untuk gagal menutup kontak output mereka. Jika relay
gagal saat menutup. Selain harganya mahal mungkin karena kelemahan gagal menutup inilah yang menjadi pertimbangan untuk memakai solid state relay. Dan karena gagal saat membuka dianggap lebih aman dari pada gagal saat menutup, relay elektromekanik masih lebih disukai dibanding solid state relay
dalam banyak aplikasi di industri.
2.4. Triac
Triac, atau triode for alternating current (Trioda untuk arus bolak-balik) adalah sebuah komponen elektronik yang kira-kira ekivalen dengan dua SCR yang disambungkan antiparalel dan kaki gerbangya disambungkan bersama. Triac ini menunjukkan sakelar dwiarah yang dapat mengalirkan arus listrik kekedua arah ketika dipicu (dihidupkan). Ini dapat disulut baik dengan tegangan positif maupun negatif pada electrode gerbang. Sekali disulut, komponen ini akan terus menghantar hingga arus yang mengalir lebih rendah dari arus genggamnya. Tegangan yang dikontrol adalah AC 200 Volt hingga 600 Volt dan maksimal arus yang dapat dikontrol adalah sebesar 26 Ampere.
2.5. Optocoupler
Optocoupler merupakan piranti elektronika yang berfungsi sebagai pemisah antara rangkaian power dengan rangkain control. Optokoupler merupakan salah satu jenis komponen yang memanfaatkan sinar sebagai pemicu on/offnya. Opto berarti optic dan coupler berarti pemicu, sehingga bisa diartikan bahwa optocoupler merupakan suatu komponen yang bekerja berdasarkan picu cahaya optic opto-coupler termasuk dalam sensor, dimana terdiri dari dua bagian yaitu transmiter dan reciver. Dasar rangkaian dapat ditunjukkan seperti gambar dibawah ini.
Gambar 2.7. Optocoupler [7]
Penggunaan ini bisa diterapkan untuk mendeteksi putaran motor atau mendeteksi lubang penanda disket pada disk drive computer.
Gambar 2.8. Sensor Optocoupler [7]
2.6. Mikrokontroller ATMEGA8
ATMega8 memiliki 3 buah PORT utama yaitu PORTB, PORTC dan PORTD dengan total pin input/output sebanyak 23 pin. PORT tersebut dapat difungsikan sebagai input/output digital atau dihubungkan sebagai periperial lainya.
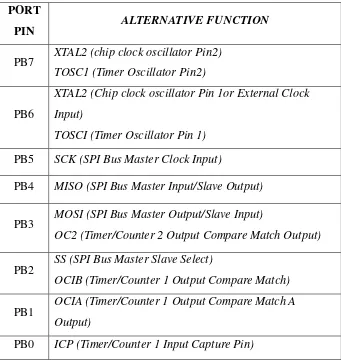
2.6.1. PORT B
Port B merupakan jalur data 8bit yang dapat difungsikan sebagai input/output. Selain itu PORTB juga dapat memiliki fungsi alternatif seperti yang tertera pada tabel dibawah ini
Tabel 2.2. Pin PORT B
PORT
PIN ALTERNATIVE FUNCTION
PB7 XTAL2 (chip clock oscillator Pin2)
TOSC1 (Timer Oscillator Pin2)
PB6
XTAL2 (Chip clock oscillator Pin 1or External Clock
Input)
TOSCI (Timer Oscillator Pin 1)
PB5 SCK (SPI Bus Master Clock Input)
PB4 MISO (SPI Bus Master Input/Slave Output)
PB3 MOSI (SPI Bus Master Output/Slave Input)
OC2 (Timer/Counter 2 Output Compare Match Output)
PB2 SS (SPI Bus Master Slave Select)
OCIB (Timer/Counter 1 Output Compare Match)
PB1 OCIA (Timer/Counter 1 Output Compare Match A
Output)
PB0 ICP (Timer/Counter 1 Input Capture Pin)
Penjelasan fungsi dari tabel diatas adalah sebagai berikut :
1. XTAL1(PB6) dan XTAL2(PB7) merupakan sumber clock utama mikrokontroler. Jika kita menggunakan clock internal (Tanpa
digital biasa. Namun jika kita menggunakan clock dari crystal external maka PB6 dan PB7 tidak dapat kita gunakan sebagai input/output.
2. TOSC1(PB6) dan TOSC2(PB7) dapat difungsikan sebagai sumber clock external untuk timer.
3. MOSI(PB3), MISO(PB4), SCK(PB5), SS(PB2) merupakan jalur komunikasi SPI. Selain itu pin ini juga berfungsi sebagai jalur pemrograman serial (ISP).
4. OC1A(PB1), OC1B(PB2) dan OC2(PB3) dapat difunsikan sebagai keluaran PWM (pulse width modulation).
5. ICP1(PB0), berfungsi sebagai timer counter 1 input capture pin.
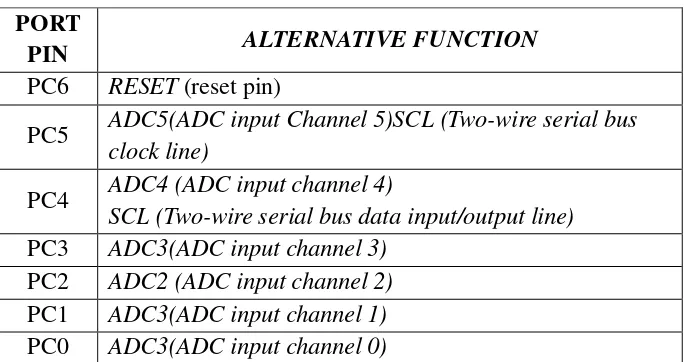
2.6.2. PORT C
PORT C adalah jalur data 7bit yang dapat difungsikan sebagai
[image:30.595.168.510.551.732.2]input/output digital. Fungsi alternatif PORT C antara lain seperti tabel dibawah :
Tabel 2.3. Pin PORT C
PORT
PIN ALTERNATIVE FUNCTION
PC6 RESET (reset pin)
PC5 ADC5(ADC input Channel 5)SCL (Two-wire serial bus
clock line)
PC4 ADC4 (ADC input channel 4)
SCL (Two-wire serial bus data input/output line)
PC3 ADC3(ADC input channel 3)
PC2 ADC2 (ADC input channel 2)
PC1 ADC3(ADC input channel 1)
Penjelasan dari tabel diatas adalah sebagai berikut :
1. ADC 6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi 10bit. ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog menjadi digital.
2. 12 (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORT C. 12C digunakan untuk kemunikasi dengn sensor atau device lain yang memiliki komunikasi data type 12C seperti sensor
accelerometer nunchuck.
3. RESET merupakan salah satu pin penting di mikrokontroller,
RESET dapat digunakan untuk menrestart program. Pada ATMega8
pin RESET dihubngkan dengan salah satu pin IO (PC6). Secara default PC6 ini didisable dan diganti menjadi pin RESET. Kita dapat mendisible fungsi pin RESET tersebut untuk menjadikan PC6 sebagai pin input/output. Kita dapat melakukan konfigurasi di
fusebit untuk melakukan pengaturanya, namun disarankan untuk tidak merubahnya karena jika pin RESET didisible maka kita tidak dapat melakukan pemrograman melalui jalur ISP.
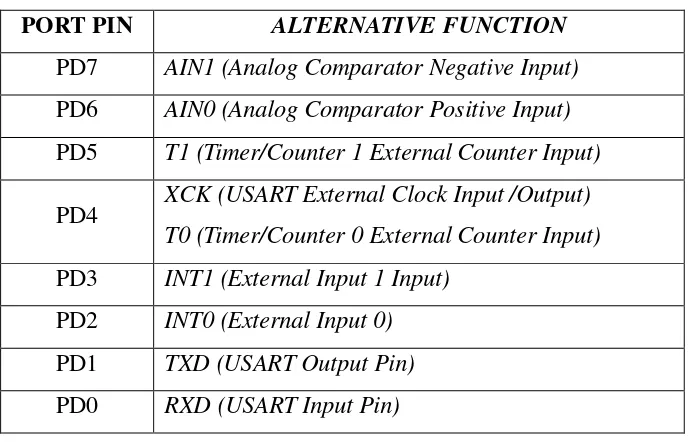
2.6.3. PORT D
Tabel 2.4. Pin PORT C
PORT PIN ALTERNATIVE FUNCTION
PD7 AIN1 (Analog Comparator Negative Input)
PD6 AIN0 (Analog Comparator Positive Input)
PD5 T1 (Timer/Counter 1 External Counter Input)
PD4 XCK (USART External Clock Input /Output)
T0 (Timer/Counter 0 External Counter Input)
PD3 INT1 (External Input 1 Input)
PD2 INT0 (External Input 0)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
Penjelasan dari tabel diatas adalah sebagai berikut :
1. USART (TXD dan RXD) merupakan jalur dan komunikasi serial dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untuk menerima data serial.
2. Interrup (INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi hardware.
1.7. Motor
arus DC (direct current). Akan tetapi sekarang banyak produsen yang membuat motor universal hanya satu jenis arus listrik saja. Motor universal arus AC jumlah lilitan tembaga lebih banyak bila dibandingan dengan lilitan tembaga pada kumparan motor arus DC. Komponen utama motor universal yaitu rotor (angker), stator (kern), sikat karbon (carbon brush/cool) dan rumah tempat sikat karbon. komponen yang terdapat pada rotor memiliki beberapa bagian seperti alur angker, komutator (lamel), kipas rotor. Stator terbuat dari tumpukan pelat besi yang disatukan, pada umumnya stator mempunyai dua kutub tempat masuknya dua kumparan medan. Sedangkan sikat karbon adalah komponen motor universal yang berfungsi untuk meneruskan arus listrik dari kumparan medan ke kumparan angker dengan menempelkan sikat karbon ke komutator. Dan rumah sikat karbon adalah tempat bergeraknya sikat karbon yang akan menekan komutator pada angker, pada rumah ini juga terdapat mekanisme per (pegas) berfungsi menekan sikat karbon.
Gambar 2.10. Motor AC [1&13]
2.8. Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja
kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut di aliri arus sehingga menjadi elektromagnetik, kumparan tadi akan tertarik kedalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan di pasang pada diafragma maka setiap gerakan kumparan akan menggerakan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
BAB III
METODALOGI PENELITIAN
3.1. Alat Dan Bahan
3.1.1. Alat
1. Solder listrik
2. Soldering pump
3. Tool set
4. Bor PCB 5. Timah 6. Multimeter
3.1.2. Bahan
1. LCD
2. SSR
3. Motor AC
4. Lampu LED
5. Capasitor 6. Transistor 7. Diode 8. IC ATMega8
9. Potensio 10. Push button
11. Socket IC ATMega8
12. Sakelar On/Off
3.2. Diagram Blok Sistem
[image:36.595.167.471.414.581.2]Setting timer berfungsi sebagai pengatur waktu berapa lama untuk memutar sampel, setelah mengatur semua tekan enter/ok. Sampel yang digunakan pada centrifuge yaitu urine dan darah. Fungsi dari motor untuk memutar sampel sesuai dengan berapa kecepatan yang disetting hingga terjadi gaya centrifugal. Kecepatan pada motor dikendalikan oleh driver motor. Sensor Rpm digunakan untuk melihat atau membaca kecepatan motor dan hasil output dari sensor berupa tegangan tersebut akan masuk pada pin adc 0 mikrokontroler, pada mikrokontroler data akan diolah dan selanjutnya akan ditampilkan di display.
Gambar 2.2. Diagram Blok
3.3. Diagram Alir Program
Proses akan dimulai saat alat on maka ditampilan LCD setting timer, setelah itu menutup pintu jika pintu belum tertutup maka motor tidak bekerja, setelah itu setting timer lalu tekan tombol enter yang akan
MIKROKONTROLLER
UP
DOWN
ENTER
RESET
DRIVER MOTOR
LCD
BUZZER
mengaktifkan timer dan motor bekerja, setelah waktu tercapai maka motor akan berhenti dan buzzer akan berbunyi.
Gambar 3.3. Diagram Alir Yes
BEGIN
Inisialisasi LCD
Pengaturan Waktu
Tutup Pintu
NO Safetiy lock
door
Waktu Tercapai
END Motor Berhenti Motor Bekerja
Buzzer Berbunyi
3.4. Diagram Mekanis
Gambar 3.3. DiagramMekanis
1. Pengaman (Fuse)
2. Buzzer
3. Tombol power
4. LCD display
5. Tombol UP
6. Tombol ENTER
7. Tombol DOWN
8. Tombol RESET
9. Motor
Reset
Enter
Down
Up
LCD
Buzzer
ON/OFF Indicator
Power On Tempat
3.5. Rangkaian Power Supply
Rangkaian power supply pada modul ini brfungsi sebagai supply
[image:39.595.188.544.278.471.2]tegangan ke semua rangkaian yang menggunakan tegangan DC. Prinsip kerja power supply adalah merubah tegangan AC menjadi tegangan DC. Skematik Power supply dapat dilihat di Gambar 3.4. dan layout power supply dapat dilihat di Gambar 3.5.
Gambar 3.4. Skematik Power Supply.
[image:39.595.187.542.507.705.2]3.6. Gambar Power Supply
[image:40.595.213.444.202.379.2]Untuk gambar power supply dapat dilihat pada gambar di bawah ini:
Gambar 3.6. Power Supply
Rangkaian power supply pada modul ini berfungsi sebagai supply
tegangan ke semua rangkain yang menggunakan tegangan DC. Prinsip kerja
power supply adalah mengubah tegangan AC menjadi tegangan DC dengan menggunakan transformator sebagai penurun tegangan dan dioda sebagai komponen yang berfungsi sebagai penyearah tegangan. Pada modul ini
power supply akan mengubah tagangan AC menjadi DC sebesar 5 VDC
dan 12 VDC dengan mengunakan ICregulator 7805 dan 7809. Adapun tegangan 5 VDC digunakan untuk rangkaian minimum sistem sedangkan tegangan 12VDC bisa digunakan sewaktu-waktu ketika diperlukan oleh SSR.
3.7. Rangkaian Minimum Sistem
memanfaatkan kapasitas penyimpanan yang dimiliki oleh IC ATMega8. Skematik minimum sistem dapat dilihat di Gambar 3.7. danlayout minimum sistem dapat dilihat di Gambar.
[image:41.595.187.517.185.410.2]Gambar 3.7. Skematik Minimum System.
[image:41.595.190.517.439.651.2]3.8. Rangkaian Keseluruhan
3.9. PROGRAM
Pembuatan program pada modul menggunakan codevisionAVR seperti dibawah ini.
/***************************************************** This program was produced by the
CodeWizardAVR V2.05.0 Professional Automatic Program Generator
© Copyright 1998-2010 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
Project : Version :
Date : 24/08/2016 Author :
Company : Comments:
Chip type : ATmega8 Program type : Application AVR Core Clock frequency: 1,000000 MHz Memory model : Small
External RAM size : 0 Data Stack size : 256
*****************************************************/
#include <mega8.h> #include <stdlib.h> #include <delay.h> #include <alcd.h>
unsigned int mikrodetik, data, data1=0, detik; unsigned char i=0;
float pulsa,frekuensi=0; int menit;
bit a=0;
unsigned char temp[2],temp2[2],temp3[4]; // Timer2 overflow interrupt service routine interrupt [TIM2_OVF] void timer2_ovf_isr(void) {
// Place your code here
// Timer 0 overflow interrupt service routine interrupt [TIM0_OVF] void timer0_ovf_isr(void) {
// Reinitialize Timer 0 value TCNT0=0x9E;
// Place your code here mikrodetik++;
if(mikrodetik==10) {
pulsa=frekuensi*60; TCNT1=0;
if (detik==0)
{menit--;detik=59;}else{detik--;} mikrodetik=0;
} }
#define ADC_VREF_TYPE 0x60
// Read the 8 most significant bits // of the AD conversion result
unsigned char read_adc(unsigned char adc_input) {
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
// Wait for the AD conversion to complete while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10; return ADCH; }
void set_timer() {
if(PINB.4==0)
{menit=menit+10;if(menit>60){menit=0;}delay_ms(200);} else if(PINB.0==0)
{menit=menit-10;if(menit<0){menit=0;}delay_ms(200);} }
lcd_gotoxy(5,0);
lcd_putsf("SELESAI");
lcd_gotoxy(0,1);
lcd_putsf("BY.AGRIANSYAH"); }}}
// Declare your global variables here
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=Out Func2=In Func1=In Func0=In
// State7=T State6=T State5=P State4=P State3=0 State2=T State1=T State0=P
PORTB=0x31; DDRB=0x08;
// Port C initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00; DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00; DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: 0,977 kHz TCCR0=0x05;
TCNT0=0x9E;
// Timer/Counter 1 initialization // Clock source: T1 pin Falling Edge // Mode: Normal top=0xFFFF
// OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
TCNT1L=0x00; ICR1H=0x00; ICR1L=0x00; OCR1AH=0x00; OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: 1000,000 kHz // Mode: Fast PWM top=0xFF // OC2 output: Non-Inverted PWM ASSR=0x00;
TCCR2=0x69; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off
// INT1: Off MCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x41;
// USART initialization // USART disabled
UCSRB=0x00;
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 125,000 kHz // ADC Voltage Reference: AVCC pin // Only the 8 most significant bits of // the AD conversion result are used ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0x83;
// SPI initialization // SPI disabled
SPCR=0x00;
// TWI initialization // TWI disabled
TWCR=0x00;
// Connections specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu:
// RS - PORTD Bit 0 // RD - PORTB Bit 7 // EN - PORTD Bit 1 // D4 - PORTD Bit 4 // D5 - PORTD Bit 3 // D6 - PORTD Bit 6 // D7 - PORTD Bit 7 // Characters/line: 16 lcd_init(16);
3.6. Perancangan Pengujian
3.6.1. Jenis Pengujian
1. Mengukur waktu centrifuge dengan menggunakan stopwatch. 2. Uji alat dengan praktek ke sampel.
3.6.2. Pengolahan Data
Jenis penelitian ini menggunakan metode Pre Eksperimental
dengan jenis “One group Post Test Design” yaitu alat centrifuge ini bekerja dengan timer yang di atur kemudian motor akan berhenti apabila waktu telah tercapai kemudian proses selesai. Sehingga penulis Hanya Melihat Hasil Tanpa Mengukur Keadaan Sebelumnya.
3.7. Variabel Penelitian
3.7.1. Variabel Bebas
Sebagai variabel bebas yaitu kecepatan Rpm motor.
1.7.2. Variabel Tergantung
Sebagai variabel tergantung yaitu pengontrol timer.
3.7.3. Variabel Terkendali
Variabel terkendali terdiri dari tampilan waktu yang dikendalikan oleh Mikrokontroler ATMega8.
3.8. Sistematika Pengukuran
1. Rata-rata Pengukuran
banyaknya pengukuran dirumuskan sebagai berikut : Rata-rata
�=∑ ��
�
……….(3.1)
dengan :
�̅ = Rata – rata
� �� = Jumlah �sebanyak �
� = Banyak data
2. Simpangan (Error)
Adalah selisih dari rata-rata nilai dari harga yang dikehendaki dengan nilai yang diukur dirumuskan sebagai berikut :
���������=�� − �̅ ……….(3.2)
3. Persentase Error
Adalah nilai persen dari simpangan (Error) terhadap nilai yang dikehendaki dirumuskan sebagai berikut :
���������������= ���������
�� � 100%
…………..(3.3)
dengan :
Simpangan = Nilai error yang dihasilkan
��������������� = ������������������������������������ %
�� = ���� − ������������������
4. Standard Deviasi (SD)
Adalah suatu nilai yang menunjukkan tingkat v(derajat) variasi kelompok data atau ukuran standard penyimpanan dari rata-ratanya. Jika standard deviasi semakin kecil maka data tersebut semakin presesi dirumuskan sebagai berikut :
dengan :
�� = Standar deviasi
� = Data �
�̅ = Rata-rata
� =Banyak data
��= �∑(� − �̅) + (� − �̅) +⋯+ (�� − �̅)
� −1
BAB IV
PENELITIAN
4.1.Spesifikasi Alat
Alat centrifuge menggunakan motor ac dengan kecepatan diatur dari 0-3000 Rpm dan dikendalikan oleh timer yang diatur sesuai kebutuhan. Pada poros motor diberi tempat untuk menyimpan cuvet, alat ini diberi , seteleah motor berputar akan menimbulkan gaya centrifugal yang dibutuhkan oleh alat ini untuk memutar sampel sehingga zat padat dan cair terpisah.
Nama Alat : Centrifuge Berbasis Mikrokontroller ATMega8
Tegangan : 220 v Frekuensi : 50-60 Hz
Daya : 100w
1.2. Modul Alat Tugas Akhir dan Alat Yang Sudah Ada
[image:52.595.187.459.582.724.2]Untuk mengetahui bagaimana bentuk dari modul yang penulis buat dapat di lihat pada gambar 4.1.
Gambar 4.1. Modul Alat Tugas Akhir
alat centrifuge adalah suatu alat yang digunakan di laboratorium untuk memisahkan suatu senyawa pada cairan yang berat molekulnya berbeda, dengan cara di putar dengan gaya centrifugal.
Gambar 4.2. Alat centrifuge
4.3. Pengukuran Waktu
4.3.1. Pengukuran Timer Dengan Waktu 5 menit
Pengujian pertama dilakukan dengan mengukur waktu
Tabel 4.1. Pengukuran Waktu Pada Saat 5 Menit. Data ke - Data Ukur timer modul Stopwatch
1 4’59” 5’00”
2 4’58” 5’00”
3 4’59” 5’00”
4 4’58” 5’00”
5 4’59” 5’00”
6 4’57” 5’00”
7 4’58” 5’00”
8 4’58” 5’00”
9 4’57” 5’00”
10 4’58” 5’00”
11 4’59” 5’00”
12 4’59” 5’00”
13 4’58” 5’00”
14 4’59” 5’00”
15 4’59” 5’00”
16 4’58” 5’00”
17 4’59” 5’00”
18 4’58” 5’00”
19 4’59” 5’00”
20 4’58” 5’00”
[image:54.595.168.512.140.598.2]1.Rata-Rata(����)
�̅ = (4′59" + 4′58" + 4′59" + 4′58" + 4′59" + 4′57"
+ 4′58" + 4′58" + 4′57" + 4′58" + 4′59"
+ 4′59" + 4′58" + 4′59" + 4′59" + 4′58"
+ 4′59" + 4′58" + 4′59" + 4′58"/20
�̅ = 4′58"
2. Standard Deviasi (SD)
�� =⎷
⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓
�(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
20−1
Pengukuran ke 2 waktu 5 menit yang di lakukan pada jam 19:00 atau pada malam hari.
Tabel 4.2. Pengukuran Waktu Pada Saat 5 Menit. Data ke - Data Ukur timer modul Stopwatch
1 4’58” 5’00”
2 4’59” 5’00”
3 4’59” 5’00”
4 4’58” 5’00”
5 4’58” 5’00”
6 4’57” 5’00”
7 4’58” 5’00”
8 4’59” 5’00”
9 4’57” 5’00”
10 4’58” 5’00”
11 4’59” 5’00”
12 4’58” 5’00”
13 4’58” 5’00”
14 4’59” 5’00”
15 4’59” 5’00”
16 4’58” 5’00”
17 4’59” 5’00”
18 4’58” 5’00”
19 4’59” 5’00”
20 4’58” 5’00”
1. Rata-Rata(����)
�̅ = (4′58" + 4′59" + 4′59" + 4′58" + 4′58" + 4′57"
+ 4′58" + 4′59" + 4′57" + 4′58" + 4′59"
+ 4′58" + 4′58" + 4′59" + 4′59" + 4′58"
+ 4′59" + 4′58" + 4′59" + 4′58"/20
�̅ = 4′58"
2. Standard Deviasi (SD)
�� =⎷
⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓
�(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
(5′00"−4′58")2+ (5′00"−4′58")2+
20−1
��= 0,18568
4.3.2. Pengukuran TimerDengan Waktu 10 menit
Pengujian kedua dilakukan dengan mengukur waktu
Tabel 4.3. Pengukuran Waktu Pada Saat 10 Menit. Data ke - Data Ukur timer modul stopwacth
1 9’58” 10’00”
2 9’58” 10’00”
3 9’59” 10’00”
4 9’58” 10’00”
5 9’59” 10’00”
6 9’59” 10’00”
7 9’58” 10’00”
8 9’58” 10’00”
9 9’58” 10’00”
10 9’59” 10’00”
11 9’58” 10’00”
12 9’58” 10’00”
13 9’57” 10’00”
14 9’58” 10’00”
15 9’58” 10’00”
16 9’58” 10’00”
17 9’59” 10’00”
18 9’59” 10’00”
19 9’58” 10’00”
20 9’58” 10’00”
[image:58.595.162.513.140.596.2]1. Rata-Rata(����)
�̅ = (9′58" + 9′58 + 9′59 + 9′58 + 9′59 + 9′59 + 9′58"
+ 9′58" + 9′58" + 9′59" + 9′58" + 9′58"
+ 9′57" + 9′58" + 9′58" + 9′58" + 9′59"
+ 9′59" + 9′58" + 9′58"/20
�̅ =9′58"
2. Satndard Deviasi (SD)
�� =⎷
⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓
�(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
(10′00"−9′58")2+ (10′00"−9′58")2+
20−1
Pengukuran ke 2 waktu 5 menit yang di lakukan pada jam 19:00 atau pada malam hari.
Tabel 4.4. Pengukuran Waktu Pada Saat 10 Menit. Data ke - Data Ukur timer modul stopwacth
1 9’59” 10’00”
2 9’58” 10’00”
3 9’58” 10’00”
4 9’59” 10’00”
5 9’58” 10’00”
6 9’59” 10’00”
7 9’58” 10’00”
8 9’58” 10’00”
9 9’58” 10’00”
10 9’57” 10’00”
11 9’58” 10’00”
12 9’58” 10’00”
13 9’59” 10’00”
14 9’58” 10’00”
15 9’59” 10’00”
16 9’58” 10’00”
17 9’58” 10’00”
18 9’59” 10’00”
19 9’58” 10’00”
20 9’59” 10’00”
1. Rata-Rata(����)
�̅ = (9′59" + 9′58" + 9′58" + 9′59" + 9′58" + 9′59"
+ 9′58" + 9′58" + 9′58" + 9′57" + 9′58"
+ 9′58" + 9′59" + 9′58" + 9′59" + 9′58"
+ 9′58" + 9′59" + 9′58" + 9′59"/20
�̅ =9′58"
2. Satndard Deviasi (SD)
��= ⎷
⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓
�(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
(10′00"−9′58")2+ (10.00−9′58")2+
20−1
SD= 0,1856
4.3.3. Pengukuran TimerDengan Waktu 15 menit
Pengujian ketiga dilakukan dengan mengukur waktu centrifuge
Tabel 4.5. Pengukuran Waktu Pada Saat 15 Menit. Data ke
- Data Ukur timer modul Stopwatch
1 14’58” 15’00”
2 14’59” 15’00”
3 14’58” 15’00”
4 14’58” 15’00”
5 14’58” 15’00”
6 14’58” 15’00”
7 14’58” 15’00”
8 14’57” 15’00”
9 14’59” 15’00”
10 14’57” 15’00”
11 14’58” 15’00”
12 14’59” 15’00”
13 14’59” 15’00”
14 14’58” 15’00”
15 14’58” 15’00”
16 14’58” 15’00”
17 14’58” 15’00”
18 14’59” 15’00”
19 14’58” 15’00”
20 14’58” 15’00”
1. Rata-Rata(����)
�̅ = (1 ′ "+1 ′ "+1 ′ "+1 ′ "+1 ′ "
+1 ′ "+1 ′ "+1 ′ "+1 ′ "
+1 ′ "+1 ′ "+1 ′ "+1 ′ "
+1 ′ "+1 ′ "+1 ′ "+1 ′ "
+1 ′ "+1 ′ "+1 ′ ")/20
�̅ = 14’58”
2. Standard Deviasi (SD)
�� =⎷
⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓
�(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
20−1
Pengukuran ke 2 waktu 15 menit yang di lakukan pada jam 19:00 atau pada malam hari.
Tabel 4.6. Pengukuran Waktu Pada Saat 15 Menit. Data ke - Data Ukur timer modul Stopwatch
1 14’59” 15’00”
2 14’58” 15’00”
3 14’58” 15’00”
4 14’57” 15’00”
5 14’58” 15’00”
6 14’59” 15’00”
7 14’58” 15’00”
8 14’58” 15’00”
9 14’57” 15’00”
10 14’58” 15’00”
11 14’59” 15’00”
12 14’59” 15’00”
13 14’58” 15’00”
14 14’58” 15’00”
15 14’59” 15’00”
16 14’59” 15’00”
17 14’58” 15’00”
18 14’58” 15’00”
19 14’59” 15’00”
20 14’58” 15’00”
1. Rata-Rata(����)
�̅ = (1 ′ "+1 ′ "+1 ′ "+1 ′ "+1 ′ "
+1 ′ "+1 ′ "+1 ′ "+1 ′ "
+1 ′ "+1 ′ "+1 ′ "+1 ′ "
+1 ′ "+1 ′ "+1 ′ "+1 ′ "
+1 ′ "+1 ′ "+1 ′ ")/20
�̅ = 14’58”
2. Standard Deviasi (SD)
�� =⎷
⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓ ⃓⃓
�(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
(15′00"−14′58")2+ (15′00"−14′58")2+
20−1
4.4.Pengukuran Rotation Per Menit (RPM)
Pengukuran Rpm motor centrifuge menggunakan taco meter dengan membandingkan hasil dari sensor optocoupler yang dipasang pada alat, berikut adalah hasil pengukuran :
No.
Rotation per menit (RPM)
Modul
Rotation per menit (RPM) Taco
Meter
1. 1500 1595
2. 1500 1589
3. 1500 1600
4. 1500 1592
5. 1500 1591
6. 1500 1578
7. 1500 1580
8. 1500 1594
9. 1500 1598
10. 1500 1588
4.5. Pembahasan
Berdasarkan pengambilan data yang telah dilakukan pengukuran waktu padacentrifuge didapatkan beberapa hasil pengukuran. Untuk pengambilan data waktu 5 menit diperoleh rata-rata waktu selama 4’58” menit sehingga terdapat standart devisiasi yang dihasilkan yaitu sebesar
rata-rata waktu selama 9’58” menit sehingga terdapat standart devisiasi yang dihasilkan yaitu sebesar 0,1856. Sedangkan untuk pengambilan data waktu 15 menit diperoleh rata-rata waktu selama 14’58” menit sehingga terdapat standart devisiasi yang dihasilkan yaitu sebesar 0,18568.
BAB V
PENUTUP
5.1 Kesimpulan
Setelah melakukan proses pembuatan, percobaan, pengujian alat dan pendataan, penulis dapat menyimpulkan sebagai berikut :
1. Dalam pembuatan alat centrifuge berbasis mikrokontroller tidak begitu banyak dana yang dikeluarkan.
2. Perbandingan harga centrifuge manual, centrifuge yang ada dipasaran dan modul, harga modul relatif murah.
3. Centrifuge berbasis microcontroller memberi kemudahan karena bekerja otomatis dalam penggunaan untuk memisahkan berat molekul yang berbeda pada sampel dengan memanfaatkan gaya sentrifugal.
4. Dari hasil pengukuran waktu di dapatkan kesalahan nilai error yaitu untuk waktu memutar sampel 5, 10, 15 menit disimpulkan memiliki hasil tingkat kesalahan (persentse error)yang masih memenuhi standar, jadi berdasarkan hasil pengukuran dan kesalahan nilai error dapat disimpulkan bahwa, modul yang dibuat dapat bekerja dengan baik dan bisa dimanfaatkan sebagai alat laboratorium yang digunakan untuk memutar sampel.
5.2. Saran
Setelah melakukan proses pembuatan, percobaan, pengujian alat dan pendataan, penulis memberikan saran sebagai pengembangan penelitian selanjutnya sebagai berikut :
1. Dalam setiap melakukan kegiatan agar lebih memperhatikan keselamatan terutama saat pembuatan modul.
2. Bisa mengembangkan dengan memberikan pemilihan kecepatan motor. 3. Motor dan cashing masih menimbulkan suara yang sedikit bising.
4. Pembuatan chasing dapat diperbaiki lagi untuk menambahkan kesan indah.
2. Cekmas, dan Taufik, 2013. Rangkaian Listrik . Palembang: CV ANDI 3. Gandasoebrata R. Penuntun Laboratorium Klinic, cetakan k-4 Penerbit
Dian Rakyat 1970; p152
4. Wahyu Hidayat. 2015. Centrifuge Berbasis Mikrokontroller, Surabaya: Politeknik Kesehatan Kemenkes
5. Aries. 2015. Mikrokontroler ATMega8. http://ariesz-smkn5bjm. blogspot. co.id/2015/05/mikrokontroler atmega8.html
6. Trikueni, Dewanto. 2014. Pengertian Solid State Relay. http://trikueni-desain-sistem.blogspot.co.id/2014/03/Pengertian-Solid-State-Relay.html 7. Teknik Elektronika. 2015. https://www.google.com/search?q=sensor+
tcrt5000&source=lnms&tbm=isch&sa=X&ved=0CAcQ_AUoAWoVChM I9aXUvi7xwIV0luOCh1kJQ4t#imgrc=nO_XalBX5mX8tM%3A
8. https://www.google.co.id/?gws_rd=cr,ssl&ei=DGncVZLqE4KsuQTuvY8 4#q=gambar+seven+segment
9. Muhammad makhluf. 2013. https://www.google.co.id/?gws_rd=cr, ssl&ei=DGncVZLqE4KsuQTuvY84#q=centrifuge\
10.Aris Munandar. 2012. http://www.leselektronika.com/2012/06/liguid-crystal-display-lcd-16-x-2.html
11.https://www.google.co.id/search?q=atmega8&biw=1366&bih=667&sourc e=lnms&tbm=isch&sa=X&ved=0CAYQ_AUoAWoVChMI47Pno6zExwI VlwiOCh05FASi#imgrc=_
12.https://www.google.co.id/search?q=pengertian+MOC3042&biw=1366&bi h=623&source=lnms&sa=X&ved=0CAUQ_AUoAGoVChMIt_CA6_PEx wIVwsSOCh0QlAFT&dpr=1
2. Masukan larutan kedalam gelas tabung centrifug, larutan yang dimasukan pada setiap tabung
harus samaukuranya.
3. Buka pintu centrifuge dan meletakan setiap tabung kedalam lubang centrifuge dengan posisi
bersilangan atau berlawanan.
4. Tutup kembali pintu centrifuge
5. Sambungkan centrifuge pada aliran arus listrik
6. Tekan sakelar pada posisi on
7. Setting waktu untuk lama proses pemisahan
8. Setelah itu tekan enter untuk memulai proses pemisahan
9. Selesai proses pemisahan tekan tombol ke posisi off
10. Buka pintu centrifuge, ambil larutan dalam tabung secara berseling atau berlawanan
11. Cabut kabel power centrifuge dari aliran arus listrik
Opto 22 • 43044 Business Park Drive • Temecula, CA 92590-3614 • www.opto22.com
SALES 800-321-6786 • 951-695-3000 • FAX 951-695-3095 • [email protected] • SUPPORT 800-835-6786 • 951-695-3080 • FAX 951-695-3017 • [email protected]
© 2006–2014 Opto 22. All rights reserved. Dimensions and specifications are subject to change. Brand or product names used herein are trademarks or registered trademarks of their respective companies or organizations.
PAGE 1 DA TA S H E E T F o rm 08 59 -15 062 5
S
o
lid-Sta
te Rela
y
s
Rugged, epoxy encapsulation construction 4,000 volts of optical isolation
Subjected to full load test and six times the rated current surge before and after encapsulation Unique heat-spreader technology
Guaranteed for life
Overview
In 1974, Opto 22 introduced the first liquid epoxy-filled line of power solid-state relays (SSR). This innovation in SSR design greatly improved the reliability and reduced the cost of manufacturing. At that time, we also incorporated into our manufacturing process 100% testing under full load conditions of every relay we produced.
By 1978, Opto 22 had gained such a reputation for reliability that we were recognized as the world’s leading manufacturer of solid-state relays. Through continuous manufacturing
improvements and the same 100% testing policy established over 40 years ago, Opto 22 is still recognized today for the very high quality and reliability of all our solid-state relays.
Description
Opto 22 offers a complete line of SSRs, from the rugged 120/ 240/380-volt AC Series to the small footprint MP Series, designed for mounting on printed circuit boards. All Opto 22 SSRs feature 4,000 volts of optical isolation, and most are UL and CSA recognized. The innovative use of room-temperature liquid epoxy encapsulation, coupled with Opto 22’s unique heat-spreader technology, are key to mass producing the world’s most reliable solid state relays.
Every Opto 22 solid state relay is subjected to full load test and six times the rated current surge both before and after
Opto 22 Power Series SSR
Part Numbers
Part Description
AC Switching
120A10 120 VAC, 10 Amp, AC Control
120A25 120 VAC, 25 Amp, AC Control 240A10 240 VAC, 10 Amp, AC Control
240A25 240 VAC, 25 Amp, AC Control 240A45 240 VAC, 45 Amp, AC Control
120D3 120 VAC, 3 Amp, DC Control 120D10 120 VAC, 10 Amp, DC Control
120D25 120 VAC, 25 Amp, DC Control 120D45 120 VAC, 45 Amp, DC Control
240D3 240 VAC, 3 Amp, DC Control 240D10 240 VAC, 10 Amp, DC Control
240Di10 240 VAC, 10 Amp, DC Control, with LED Indica-tors
240D25 240 VAC, 25 Amp, DC Control
240Di25 240 VAC, 25 Amp, DC Control, with LED Indica-tors
240D30-HS 240 VAC, 30 Amp, DC Control, with integrated heatsink
240D45 240 VAC, 45 Amp, DC Control
240Di45 240 VAC, 45 Amp, DC Control, with LED Indica-tors
380D25 380 VAC, 25 Amp, DC Control 380D45 380 VAC, 45 Amp, DC Control
480D10-12 480 VAC, 10 Amp, DC Control, Transient Proof 480D15-12 480 VAC, 15 Amp, DC Control, Transient Proof
480D25-12 480 VAC, 25 Amp, DC Control, Transient Proof
480D25-HS 480 VAC, 25 Amp, DC Control, Transient Proof, with integrated heatsink
480D45-12 480 VAC, 45 Amp, DC Control, Transient Proof
575D15-12 575 VAC, 15 Amp, DC Control, Transient Proof
575D45-12 575 VAC, 45 Amp, DC Control, Transient Proof
575D30-HS 575 VAC, 30 Amp, DC Control, Transient Proof, with integrated heatsink
575Di45-12 575 VAC, 45 Amp, DC Control, Transient Proof, with LED Indicators
MP120D2 or P120D2
120 VAC, 2 Amp, DC Control. P model is low profile.
MP120D4 or P120D4
120 VAC, 4 Amp, DC Control. P model is low profile. MP240D2
or P240D2
240 VAC, 2 Amp, DC. P model is low profile.
MP240D4 or P240D4
240 VAC, 4 Amp, DC. P model is low profile. MP380D4 380 VAC, 4 Amp, DC
Z120D10 Z Model, 120 VAC, 10 Amp, DC Control Z240D10 Z Model, 240 VAC, 10 Amp, DC Control
DC Switching
DC60P or DC60MP
60 VDC, 3 Amp, DC Control. P model is low profile. DC200P or
DC200MP
200 VDC, 1 Amp, DC Control. P model is low profile.
DC60S-3 60 VDC, 3 Amp, DC Control DC60S-5 60 VDC, 5 Amp, DC Control
Accessories
SAFETY COVER Power Series SSR safety cover SSR-HS Power Series SSR heatsink
SSR-THERMOPAD Thermal conductive pad (pack of 10) Part Description
Opto 22 • 43044 Business Park Drive • Temecula, CA 92590-3614 • www.opto22.com
SALES 800-321-6786 • 951-695-3000 • FAX 951-695-3095 • [email protected] • SUPPORT 800-835-6786 • 951-695-3080 • FAX 951-695-3017 • [email protected]
© 2006–2014 Opto 22. All rights reserved. Dimensions and specifications are subject to change. Brand or product names used herein are trademarks or registered trademarks of their respective companies or organizations.
Soli
d
-S
ta
te
Rela
y
s
PAGE 2 DA TA S H E E T F o rm 085 9-1 5 0 625Accessories for the Power-Series SSRs include a safety cover, heatsink, and a matching thermal conductive pad. See page 3.
Power Series SSRs
Opto 22 provides a full range of Power Series relays with a wide variety of voltage (120–575 volts) and current options (3–45 amps). All Power Series relays feature 4,000 volts of optical isolation and have a high PRV rating. Some Power Series relays include built-in LEDs to indicate operation.
See page 4.
DC Series
The DC Series delivers isolated DC control to large OEM customers worldwide. All DC control SSRs are LS TTL compatible.
AC Series
The AC Series offers the ultimate in solid state reliability. All AC Power Series relays feature a built-in snubber as well as zero-voltage turn-on and zero-current turn-off. Transient-proof models offer self protection for noisy electrical environments.
Z Series SSRs
The Z Series employs a unique heat transfer system that makes it possible for Opto 22 to deliver a low-cost, 10-amp, solid state relay in an all-plastic case. The push-on, tool-free quick-connect terminals make the Z Series ideal for high-volume OEM applications. Operating temperature: –40 °C to 100 °C. See page 7.
Printed Circuit Series SSRs
Opto 22’s Printed Circuit Series allows OEMs to easily deploy solid state relays on printed circuit boards. Two unique packages are available, both of which will switch loads up to four amps. Operating temperature: –40 °C to 100 °C. See page 9.
footprint to allow maximum relay density on the printed circuit board.
P Series
The P Series power relays provide low-profile [0.5 in. (12.7 mm)] center mounting on printed circuit boards.
HS Series SSRs
The HS Series features an integrated heatsink, which makes them so cool.
These relays have less thermal resistance inside, so heat dissipates more easily than in a standard SSR mounted to the same heatsink. With the heatsink built-in, you don't have to select one from a catalog, and installation is much easier. Includes a DIN-rail adapter. See page 13.
Specifications
(all Power Series models)
• 4,000 V optical isolation, input to output • Zero voltage turn-on
• Zero-current turn-off
• Turn-on time: 0.5 cycle maximum • Turn-off time: 0.5 cycle maximum • Operating temperature: –40 °C to 100 °C • Operating frequency: 25 to 65 Hz
(operates at 400 Hz with six times off-state leakage) • Coupling capacitance, input to output: 8 pF maximum • Hermetically sealed
• DV/DT Off-state: 200 volts per microsecond • DV/DT commutating: snubbed for rated current at
0.5 power factor • UL recognized • CSA certified • CE component
• Torque specs for screws (this spec is both the recommended torque and the maximum torque you should use):
Opto 22 • 43044 Business Park Drive • Temecula, CA 92590-3614 • www.opto22.com
SALES 800-321-6786 • 951-695-3000 • FAX 951-695-3095 • [email protected] • SUPPORT 800-835-6786 • 951-695-3080 • FAX 951-695-3017 • [email protected]
© 2006–2014 Opto 22. All rights reserved. Dimensions and specifications are subject to change. Brand or product names used herein are trademarks or registered trademarks of their respective companies or organizations.
Solid-S
tat
e Rela
y
s
DA TA S H E E T F o rm 0 8 5 9 -15 06 25 PAGE 3 Safety CoverA plastic safety cover (Opto 22 part number SAFETY COVER) is available for use with Opto 22 Power Series SSRs. The safety cover reduces the chance of accidental contact with relay terminals, while providing access holes for test
instrumentation.
SSR-HS Heatsink
Custom designed for the Power Series SSRs, the SSR-HS heatsink provides excellent heat dissipation when mounted to the SSR with a matching thermal conductive pad, used in place of silicon grease. One thermal pad is included with the heatsink. Additional pads may be purchased in packs of 10 (part number S
![Gambar 2.1. Centrifuge [9]](https://thumb-ap.123doks.com/thumbv2/123dok/610955.554093/20.595.211.454.381.550/gambar-centrifuge.webp)
![Gambar 2.2. Centrifuge High Speed [9]](https://thumb-ap.123doks.com/thumbv2/123dok/610955.554093/21.595.209.453.210.311/gambar-centrifuge-high-speed.webp)
![Gambar 2.4. Liquid Cristal Display (LCD) [10]](https://thumb-ap.123doks.com/thumbv2/123dok/610955.554093/23.595.169.502.295.754/gambar-liquid-cristal-display-lcd.webp)
![Gambar 2.5. Solid State Relay(SSR) [6]](https://thumb-ap.123doks.com/thumbv2/123dok/610955.554093/24.595.147.461.602.711/gambar-solid-state-relay-ssr.webp)
![Gambar 2.6. Rangkaian Triac [6]](https://thumb-ap.123doks.com/thumbv2/123dok/610955.554093/26.595.189.485.540.671/gambar-rangkaian-triac.webp)
![Gambar 2.7. Optocoupler [7]](https://thumb-ap.123doks.com/thumbv2/123dok/610955.554093/27.595.192.443.374.534/gambar-optocoupler.webp)
![Gambar 2.8. Sensor Optocoupler [7]](https://thumb-ap.123doks.com/thumbv2/123dok/610955.554093/28.595.137.514.518.712/gambar-sensor-optocoupler.webp)