61
DAFTAR PUSTAKA
[1] Theraja. B.L. & A.K. Theraja.2005.”ElectricalTechnology”.S.Chand & Company Ltd, New Delhi.
[2] Mohan Ned, Undeland Tore M., Robbins Williams P.1995.”Power
Electronics”.John Wiley & Sons, Inc, Canada.
[3] Powersim Technologies Inc. 1999. “PSIM User Manual”.Richmond, B.C. Canada.
[4] Chapman, Stephen J.2005.”Electric Machinary Fundamentals Fourth Edition”.Singapore: McGraw-Hill International Edition.
[5] Richardson, Donald V.1982. “Rotating Electric Machinary & Transformer Technology Second Edition”.Virginia: Reshton Publishing Company, Inc.
[6] Floyd.2001. “Electronics Fundamentals Circuit, Devices, and Application”.New Jersey:Printice Hall, Inc.
[7] Mehta, V.K & Mehta Rohit. 2002. “Principal of Electrical Machines”. S. Chand & Company Ltd, New Delhi.
23 BAB III
METODE PENELITIAN
3.1 Bahan dan Peralatan
Bahan yang digunakan untuk melakukan penelitian ini adalah data spesifikasi Motor DC. Peralatan yang akan digunakan untuk penelitian start Motor DC Shunt dan Motor DC Seri dengan thyristor controller sesuai dengan respon arus start adalah program PSIM ver 9.0.
3.2 Variabel yang Diamati
Variabel yang diamati dalam penelitian ini adalah : Arus start motor
Kecepatan motor
3.5 Prosedur Penelitian
a. Penulis akan merancang simulasi yang menyerupai percobaan Motor DC dengan menggunakan data motor DC yang didapat sebagai parameter dalam simulasi dengan bantuan program komputer yaitu PSIM 9.0.
b. Mengetahui besar nilai tahanan tambahan untuk start Motor DC Shunt . c. Mengetahui besar nilai tahanan tambahan untuk start Motor DC Seri. d. Merancang rangkaian sensor arus start agar sesuai dengan respon arus start
yang diinginkan.
24 f. Mensimulasikan rangkaian start Motor DC Shunt dan Motor DC Seri dengan thyristor controller untuk melihat besar arus yang dihasilkan pada masing-masing arus start.
Prosedur simulasi start Motor DC Shunt dan Motor DC Seri, secara flowchart dapat digambarkan pada Gambar 3.1.
Gambar 3.1 Flowchart pensimulasian start Motor DC Shunt dan Motor DC Seri dengan Thyristor Controller
Penentuan data parameter Motor DC Shunt dan Motor DC Seri
Penentuan besar nilai tahanan tambahan Motor DC Shunt dan Motor DC Seri
Mensimulasikan percobaan start Motor DC Shunt dan Motor DC seri pada PSIM ver 9.0
Memperolah hasil besar arus start dan kecepatan Motor DC Shunt dan Motor DC Seri
Mulai
Penentuan rangkaian sensor arus start
25 BAB IV HASIL DAN PEMBAHASAN
4.1 Persiapan Data
4.1.1. Motor DC Shunt
Motor DC yang digunakan memiliki spesifikasi sebagai berikut: Daya nominal = 300 W
Simulasi motor pada PSIM memerlukan tambahan data yaitu tahanan medan dan induktansi medan. Dengan melakukan uji coba pada PSIM, maka didapat nilai yg mendekati sesuai dengan spesifikasi Motor DC Shunt diatas yaitu :
Tahanan medan = 30 Ohm Induktansi medan = 250 mH
26 Inertia motor = 0,32 Kgm2
Simulasi motor pada PSIM memerlukan tambahan data yaitu tahanan medan dan induktansi medan. Dengan melakukan uji coba pada PSIM, maka didapat nilai yg mendekati sesuai dengan spesifikasi Motor DC Shunt diatas yaitu :
Tahanan medan = 4,667 Ohm Induktansi medan = 100 mH
4.1.2. Motor DC Seri
Motor DC yang digunakan memiliki spesifikasi sebagai berikut: Daya nominal = 300 W
Simulasi motor pada PSIM memerlukan tambahan data yaitu tahanan medan dan induktansi medan. Dengan melakukan uji coba pada PSIM, maka didapat nilai yg mendekati sesuai dengan spesifikasi Motor DC Seri diatas yaitu :
Tahanan medan = 37,5 Ohm Induktansi medan = 100 mH
Motor DC 31.5 kW yang digunakan memiliki spesifikasi sebagai berikut: Daya nominal = 31.5 kW
27
Simulasi motor pada PSIM memerlukan tambahan data yaitu tahanan medan dan induktansi medan. Dengan melakukan uji coba pada PSIM, maka didapat nilai yg mendekati sesuai dengan spesifikasi Motor DC Shunt diatas yaitu :
Tahanan medan = 2 Ohm Induktansi medan = 10 mH
4.1.3. Tahanan Starting Motor DC Shunt
Tahanan start akan diberikan sampai pada batas jumlah yang disesuaikan dengan parameter Motor DC 300 W. Dimulai dari dua kali lebih besar dari arus nominal, tiga kali arus start nominal, dst, sampai jumlah tahanan menjadi satu.
a. Melalui data motor diatas maka akan ditetapkan arus armatur maksimal yang diperbolehkan yaitu dua kali lebih besar dari arus armatur nominal atau Imax = 2 x Ia = 2 x 2,22 = 4,44 A dan arus minimal yang
diperbolehkan yaitu sama dengan arus nominal armatur atau atau Imin = Ia
= 2,22 A.
Dari nilai diatas maka R1 = V/Imax = 180/ 4,44 = 40,54 Ohm
Jumlah perpindahan dan resistor yang diperlukan ialah
28
Maka akan ada 4 perpindahan dan 3 tahanan. R2 = R1 x Imin/Imax =40,54 x 2,22/4,44 = 20,27 Ohm
diperbolehkan yaitu sama dengan arus nominal armatur atau atau Imin = Ia
= 2,22 A.
Dari nilai diatas maka R1 = V/Imax = 180/ 6,66 = 27,027 Ohm
Jumlah perpindahan dan resistor yang diperlukan ialah
Maka akan ada 3 perpindahan dan 2 tahanan.
R2 = R1 x Imin/Imax =27,027 x 2,22/6,66 = 9,009 Ohm
Nilai resisitor 1 (r1) = R1– R2 = 27,027 – 9,009 = 18,018 Ohm
Nilai resistor 2 (r2) = R2– Ra = 9,009 – 7,36 = 1,649 Ohm
29 diperbolehkan yaitu sama dengan arus nominal armatur atau atau Imin = Ia
= 2,22 A.
Dari nilai diatas maka R1 = V/Imax = 180/ 8,88 = 20,27 Ohm
Jumlah perpindahan dan resistor yang diperlukan ialah
Maka akan ada 2 perpindahan dan 1 tahanan.
Nilai resisitor 1 (r1) = R1– Ra = 20,27 – 7,36 = 12,91 Ohm
Tahanan start akan diberikan sampai pada batas jumlah yang disesuaikan dengan parameter Motor DC 31,5 Kw :
a. Melalui data motor diatas maka akan ditetapkan arus armatur maksimal yang diperbolehkan yaitu empat kali lebih besar dari arus armatur nominal atau Imax = 4 x Ia = 4 x 90 = 360 A dan arus minimal yang diperbolehkan
yaitu sama dengan arus nominal armatur atau atau Imin = Ia = 90 A.
Dari nilai diatas maka R1 = V/Imax = 420/ 360 = 1,167 Ohm
Jumlah perpindahan dan resistor yang diperlukan ialah
Maka akan ada 2 perpindahan dan 1 tahanan.
Nilai resisitor 1 (r1) = R1– Ra = 1,167 – 0,65 = 0,517 Ohm
30 diperbolehkan yaitu sama dengan arus nominal armatur atau atau Imin = Ia
= 90 A.
Dari nilai diatas maka R1 = V/Imax = 420/ 157,5 = 2,667 Ohm
Jumlah perpindahan dan resistor yang diperlukan ialah
Maka akan ada 4 perpindahan dan 3 tahanan. R2 = R1 x Imin/Imax =2,333 x 90/157,5 = 1,5238 Ohm
R3 = R2 x Imin/Imax =1,5238 x 90/157,5 = 0,8707 Ohm
Nilai resisitor 1 (r1) = R1– R2 = 2,333 – 1,5238 = 1,1429 Ohm
Nilai resisitor 2 (r2) = R2– R3 = 1,5238 – 0,8707 = 0,6616 Ohm
Nilai resisitor 3 (r3) = R3– Ra = 0,6616 – 0,65 = 0,22076 Ohm
4.1.4. Tahanan Starting Motor DC Seri
Melalui data motor 300 W maka akan ditetapkan arus armatur maksimal yang diperbolehkan yaitu satu setengan kali lebih besar dari arus armatur nominal atau Imax = 1,5 x Ia = 1,5 x 2,22 = 3,33 A dan arus minimal yang diperbolehkan
yaitu sama dengan arus nominal armatur atau atau Imin = Ia = 2,22 A.
Dari nilai diatas maka R1 = V/Imax = 180/ 3,33 = 54,054 Ohm
31
Untuk menunjukkan perbedaan jumlah tahanan start penulis mengambil jumlah tahanan 1, 2, dan 3.
Melalui data motor 31,5 Kw maka akan ditetapkan arus armatur maksimal yang diperbolehkan yaitu satu setengan kali lebih besar dari arus armatur nominal atau Imax = 1,5 x Ia = 1,5 x 90 = 135 A dan arus minimal yang diperbolehkan yaitu
sama dengan arus nominal armatur atau atau Imin = Ia = 90 A.
Dari nilai diatas maka R1 = V/Imax = 420/ 135 = 3.11 Ohm
Karena kurva magnetisasi pada simulasi PSIM berbentuk linear maka . Hal ini menyebabkan jumlah tahanan tidak dipengaruhi oleh besar arus maksimum start, sehingga persamaanya menjadi:
32
4.1.5. Rangkain Sensor Start Motor DC Shunt
Rangkain ini secara sederhana dapat terlihat pada Gambar 4.1 dibawah ini
V Shunt Field
Gambar 4.1 Diagram rangkaian start Motor DC Shunt dengan Thyristor
Controller
33 arus maksimum awal (Imax), arus start melalui nilai 2,22 A yang menjadi nilai
sinyal pengaktifan thyristor. Pada thyristor dua (THY 2) diperlukan dua blok D, satu saat mencapai mencapai arus maksium awal, yang kedua untuk menunda arus sinyal pengaktifan pada thyristor pertama. Blok D terdiri dari rangkaian DC RL, dimana saat mencapai nilai sinyal akan memerlukan waktu tambahan. Rangkaiannya dapat terlihat pada Gambar 4.2 dibawah ini.
Melalui percobaan pada PSIM didapat nilai kedua tahanan sebesar 10 ohm, nilai induktor sebesar 0,5 H dan besar tegangan 0,11 volt.
Gambar 4.2 Rangkaian delay dengan RL
4.1.6. Rangkain Sensor Start Motor DC Seri
Rangkain ini secara sederhana dapat terlihat pada gambar dibawah ini
V
34 Rangkaian sensor Motor DC Seri sama dengan rangkaian Motor DC Shunt. Sensor arus akan membaca nilai arus dan mengirimkan nilai arus pada thyristor. Nilai arus yg diteruskan hanya akan bernilai 2,22 A yang artinya thyristor akan segera aktif jika sensor membaca nilai 2,22 A. Karena nilai sinyal yang digunakan sama maka perlu switch penundaan sinyal (Blok D) pada thyristor agar thyristor tidak aktif bersamaan. Pada thyristor satu (THY1) ada satu blok D karena saat arus mencapai arus maksimum awal (Imax), arus start melalui nilai 2,22 A yang
menjadi nilai sinyal pengaktifan thyristor. Pada thyristor dua (THY 2) diperlukan dua blok D, satu saat mencapai mencapai arus maksium awal, yang kedua untuk menunda arus sinyal pengaktifan pada thyristor pertama. Blok D terdiri dari rangkaian DC RL, dimana saat mencapai nilai sinyal akan memerlukan waktu tambahan. Rangkaiannya dapat terlihat pada Gambar 4.2.
Melalui percobaan pada PSIM didapat nilai kedua tahanan sebesar 10 ohm, nilai inductor sebesar 0,5 H dan besar tegangan 0,11 volt.
4.1.7. Rangkain Start Motor DC Shunt dengan Thyristor Controller
35 Gambar 4.4 Rangkain Start Motor DC Shunt dengan Thyristor Controller
dimana arus start 4 kali arus nominal.
36 Gambar 4.6 Rangkain Start Motor DC Shunt dengan Thyristor Controller
dimana arus start 2 kali arus nominal.
4.1.8. Rangkain Start Motor DC Seri dengan Thyristor Controller
Bentuk rangkaian start motor DC seri ialah :
37 Gambar 4.8 Rangkain Start Motor DC Seri dengan Thyristor Controller dimana
memiliki 2 tahanan start.
Gambar 4.9 Rangkain Start Motor DC Seri dengan Thyristor Controller dimana memiliki 3 tahanan start.
4.2 Hasil Simulasi Start Motor DC Shunt
Hasil simulasi untuk arus start Motor DC Shunt saat tidak memakai thyristor
38 Gambar 4.10 Grafik i-t arus start Motor DC Shunt tanpa Thyristor Controller. Dari grafik Gambar 4.10 nilai Imax = 22,27 A
Dalam perhitungan:
Imax = V/Ra = 180/7,36 = 24,456 A
Gambar 4.11 Grafik i-t arus start Motor DC Shunt 31,5 kW tanpa Thyristor
Controller
39 Dalam perhitungan:
Imax = V/Ra = 420/0,65 = 646,15 A
Hasil simulasi untuk arus start Motor DC shunt dengan thristor controller didapat hasil sebagai berikut:
Gambar 4.12 Grafik i-t arus start Motor DC Shunt dengan Thyristor Controller dimana arus start 4 kali arus nominal.
Dari Gambar 4.12 didapat:
No. Imax(A) Waktu(d)
1 8,82 0,0084
2 5,36 0,7683
Tabel 4.1 Hasil simulasi waktu dan arus puncak 1 tahanan Motor DC Shunt Dengan perhitungan memakai rumus dari PSIM yaitu :
- atau dengan bentuk lain
Dimana:
40
Laf : induktansi bersama medan dan armatur
If : arus medan
W: kecepatan motor -
Nilai Vt, Ia, Ra, If, W merupakan nilai rating nominal motor
41 ( )
Perbedaan ini disebabkan pembulatan dalam pembacaan grafik pada hasil simulasi. Perhitungan dengan rumus PSIM ini juga sama dengan perhitungan yang lainnya
Dalam perhitungan, nilai setiap arus puncak ialah: Imax1 = V/R1 = 180/20,27 = 8,88 A
Eb1 = V – Imin.R1 = 180 – 2,22.20,27 = 135,0006 V
Imax2 = (V – E1)/Ra = (180-135,0006)/7,36 = 6,11A
No. Imax(A)
1 8,88 2 6,11
Tabel 4.2 Hasil perhitungan arus puncak 1 tahanan Motor DC Shunt
Gambar 4.13 Grafik i-t arus start Motor DC Shunt dengan Thyristor Controller dimana arus start 3 kali arus nominal.
42 No. Imax(A) Waktu(d)
1 6,66 0,0077
2 5,98 0,9789
3 2,62 1,2779
Tabel 4.3 Hasil simulasi waktu dan arus puncak 2 tahanan Motor DC Shunt Dalam perhitungan, nilai setiap arus puncak ialah:
Imax1 = V/R1 = 180/27,027 = 6,66 A
Eb1 = V – Imin.R1 = 180 – 2,22.27,027 = 120,00006 V
Imax2 = (V – E1)/R2 = (180-120,00006)/9,009 = 6,66 A
Eb2 = V – Imin.R2 = 180 – 2,22.9,009 = 160, 00002 V
Imax3 = (V-E2)/Ra = (180 – 160,00002)/7,36 = 2,717 A
No. Imax(A)
1 6,66 2 6,66 3 2,717
Tabel 4.4 Hasil perhitungan arus puncak 2 tahanan Motor DC Shunt
Gambar 4.14 Grafik i-t arus start Motor DC Shunt dengan Thyristor Controller
43 Dari Gambar 4.14, didapat nilai puncak setiap arus ialah:
No. Imax(A) Waktu(d)
1 4,46 0,0085
2 4,32 1,3468
3 4,14 2,0052
4 2,89 2,3204
Tabel 4.5 Hasil simulasi waktu dan arus puncak 3 tahanan Motor DC Shunt Dalam perhitungan, nilai setiap arus puncak ialah:
Imax1 = V/R1 = 180/40,54 = 4,44 A
44 Gambar 4.15 Grafik i-t arus start Motor DC Shunt 31,5 kW dengan Thyristor
Controller dimana arus start 4 kali arus nominal.
Dari Gambar 4.15 didapat:
No. Imax(A) Waktu(d)
1 341,6 0,0316
2 163 4,5045
Tabel 4.7 Hasil simulasi waktu dan arus puncak 1 tahanan Motor DC Shunt 31,5 kW
Dalam perhitungan, nilai setiap arus puncak ialah: Imax1 = V/R1 = 420/1,167 = 360A
Eb1 = V – Imin.R1 = 420 – 90.1,167 = 314,97 V
Imax2 = (V – E1)/Ra = (420-314,97)/0,65 = 161,58A
No. Imax(A)
1 360
2 161,58
45 Gambar 4.16 Grafik i-t arus start Motor DC Shunt 31,5 kW dengan Thyristor
Controller dimana arus start 1,75 kali arus nominal
Dari Gambar 4.16, didapati nilai puncak setiap arus ialah: No. Imax(A) Waktu(d)
1 157,3 0,027
2 155,635 7,9174
3 154,86 12,4128
4 118,19 14,959
Tabel 4.9 Hasil simulasi waktu dan arus puncak 3 tahanan Motor DC Shunt 31,5 kW Dalam perhitungan, nilai setiap arus puncak ialah:
Imax1 = V/R1 = 420/2,667 = 157,5 A
Eb1 = V – Imin.R1 = 420 – 90.2,667 = 179,997 V
Imax2 = (V – E1)/R2 = (420-179,997)/1,5238 = 157,503 A
Eb2 = V – Imin.R2 = 420 – 90.1,5238 = 282,858 V
Imax3 = (V-E2)/R3 = (420-282,858)/0,8707 = 157,4968 A
Eb3 = V – Imin.R3 = 420 – 90.0,8707 = 341,631 V
46 No. Imax(A)
1 157,5 2 157,503 3 157,4968 4 120,5667
Tabel 4.10 Hasil perhitungan arus puncak 3 tahanan Motor DC Shunt 31,5 kW Dari hasil perhitungan dan manual diatas terdapat perbedaan yang disebabkan oleh perhitungan simulasi menggunakan perhitungan transien sehingga nilai arus simulasi lebih kecil. Hal ini disebabkan nilai dari rugi-rugi reaktif diperhitungkan. Tetapi hal ini tidak terlalu berpengaruh dalam menentukan setiap nilai tahanan start tanpa menggunakan perhitungan transien dan fungsi tahanan start untuk menurunkan nilai arus start dengan baik.
Hasil simulasi untuk kecepatan start Motor DC Shunt dengan thyristor controller didapat hasil sebagai berikut:
47 Gambar 4.18 Grafik n-t arus start Motor DC Shunt dengan Thyristor Controller
dimana arus start 3 kali arus nominal.
48 Gambar 4.20 Grafik n-t arus start Motor DC Shunt 31,5 kW dengan Thyristor
Controller dimana arus start 4 kali arus nominal.
Gambar 4.21 Grafik n-t arus start Motor DC Shunt 31,5 kW dengan Thyristor
Controller dimana arus start 1,75 kali arus nominal.
Hasil grafik menunjukkan bahwa thyristor controller dapat menurunkan arus start Motor DC dan menghasilkan arus start sesuai dengan respon arusnya.
4.3 HASIL SIMULASI START MOTOR DC SERI
49 Gambar 4.22 Grafik i-t arus start Motor DC Seri tanpa Thyristor Controller. Dari grafik Gambar 4.20 nilai Imax = 3,92 A
Dalam perhitungan:
Imax = V/(Ra + Rf) = 180/(7,36 + 37,5) = 4,01 A
Gambar 4.23 Grafik i-t arus start Motor DC Seri tanpa Thyristor Controller. Dari grafik Gambar 4.21 nilai Imax = 156 A
50 Imax = V/(Ra + Rf) = 420/(0,65 + 2) = 158,5 A
Hasil simulasi arus start Motor DC Shunt dengan thristor controller didapat hasil sebagai berikut:
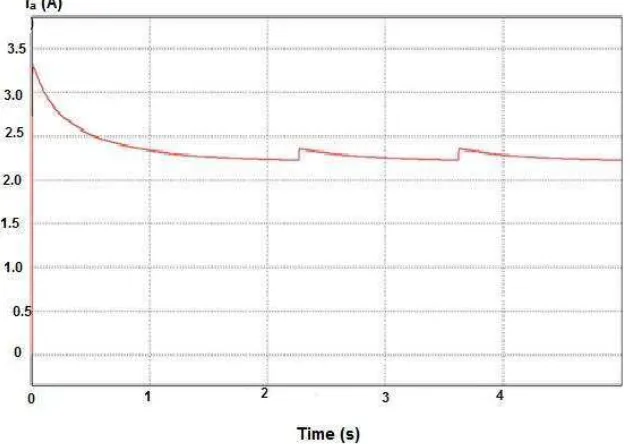
Gambar 4.24 Grafik i-t arus start Motor DC Seri dengan Thyristor Controller dengan 1 tahanan start.
Dari Gambar 4.22, didapat nilai puncak setiap arus ialah: No. Imax(A) Waktu(d)
1 3,29 0,014
2 2,49 2,275
Tabel 4.11 Hasil simulasi waktu dan arus puncak 1 tahanan Motor DC Seri Dalam perhitungan, nilai setiap arus puncak ialah:
Imax1 = V/R1 = 180/54,054 = 3,33 A
Eb1 = V – Imin.R1 = 180 – 2,22.54,054 = 60,00012 V
Imax2 = (V – E1)/(Ra + Rf) = (180-135,0006)/(7,36 + 37,5) = 2,67 A
No. Imax(A)
1 3,33 2 2,67
51 Gambar 4.25 Grafik i-t arus start Motor DC Seri dengan Thyristor Controller
dengan 2 tahanan start. Dari Gambar 4.25, didapat nilai puncak setiap arus ialah:
No. Imax(A) Waktu(d)
1 3,29 0,014
2 2,35 2,275
3 2,35 3,3632
Tabel 4.13 Hasil simulasi waktu dan arus puncak 2 tahanan Motor DC Seri Dalam perhitungan, nilai setiap arus puncak ialah:
Imax1 = V/R1 = 180/54,054 = 3,33 A
Eb1 = V – Imin.R1 = 180 – 2,22.54,054 = 60,00012 V
Imax2 = (V – E1)/R2 = (180-60,00012)/49,457 = 2,42 A
Eb2 = V – Imin.R2 = 180 – 2,22.49,457 = 70,20 V
Imax3 = (V-E2)/ (Ra + Rf)= (180 – 70,20)/44,86 = 2,44 A
No. Imax(A)
1 3,33 2 2,42 3 2,44
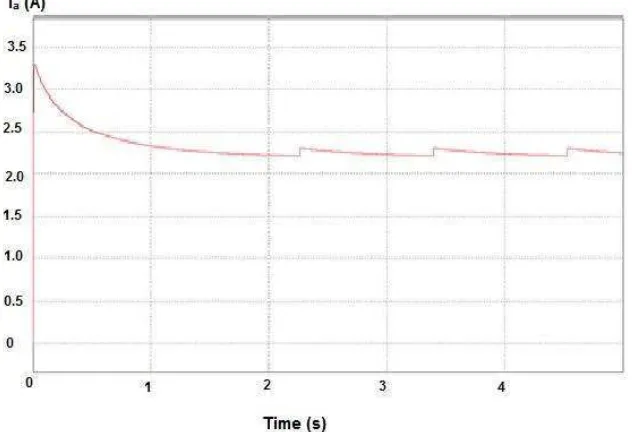
52 Gambar 4.26 Grafik i-t arus start Motor DC Seri dengan Thyristor Controller
dengan 3 tahanan start. Dari Gambar 4.26, didapat nilai puncak setiap arus ialah:
No. Imax(A) Waktu(d)
1 3,29 0,014
2 2,3 2,75
3 2,3 3,407
4 2,3 4,54
Tabel 4.15 Hasil simulasi waktu dan arus puncak 3 tahanan Motor DC Seri Dalam perhitungan, nilai setiap arus puncak ialah:
Imax1 = V/R1 = 180/54,054 = 3,33 A
Eb1 = V – Imin.R1 = 180 – 2,22.50,054 = 60,00012 V
Imax2 = (V – E1)/R2 = (180-60,00012)/50,99 = 2,35 A
Eb2 = V – Imin.R2 = 180 – 2,22.50,99 = 66,80 V
Imax3 = (V-E2)/R3 = (180 – 66,80)/47,926 = 2,36 A
Eb3 = V – Imin.R3 = 180 – 2,22.47,926 = 73,6 V
53
Tabel 4.16 Hasil perhitungan arus puncak 3 tahanan Motor DC Seri
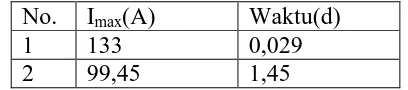
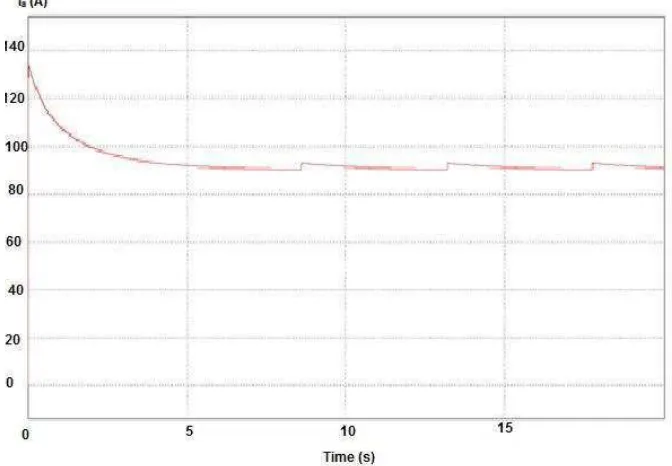
Gambar 4.27 Grafik i-t arus start Motor DC Seri 31,5 kW dengan Thyristor
Controller dengan 1 tahanan start.
Dari Gambar 4.27, didapat nilai puncak setiap arus ialah: No. Imax(A) Waktu(d)
1 133 0,029
2 99,45 1,45
Tabel 4.17 Hasil simulasi waktu dan arus puncak 1 tahanan Motor DC Seri Dalam perhitungan, nilai setiap arus puncak ialah:
Imax1 = V/R1 = 420/3,11 = 135 A
54 Gambar 4.28 Grafik i-t arus start Motor DC Seri 31,5 kW dengan Thyristor
Controller dengan 3 tahanan start.
Dari Gambar 4.28, didapat nilai puncak setiap arus ialah: No. Imax(A) Waktu(d)
1 133,965 0,033
2 93,03 8,625
3 93,03 13,198
4 93,03 17,774
Tabel 4.19 Hasil simulasi waktu dan arus puncak 3 tahanan Motor DC Seri 31,5 kW Dalam perhitungan, nilai setiap arus puncak ialah:
Imax1 = V/R1 = 420/3,11 = 135 A
Eb1 = V – Imin.R1 = 420 – 90.3,11 = 140,1 V
Imax2 = (V – E1)/R2 = (420-140,1)/2,95733 = 94,646 A
Eb2 = V – Imin.R2 = 420 – 90.2,95733 = 153,8402 V
Imax3 = (V-E2)/R3 = (420 – 153,8402)/2,80366 = 94,933 A
Eb3 = V – Imin.R3 = 420 – 90.2,80366 = 167,6706 V
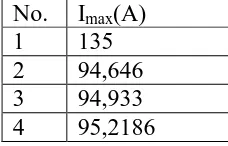
55 No. Imax(A)
1 135
2 94,646 3 94,933 4 95,2186
Tabel 4.20 Hasil perhitungan arus puncak 3 tahanan Motor DC Seri 31,5 kW Dari hasil perhitungan dan manual diatas terdapat perbedaan yang disebabkan oleh perhitungan simulasi menggunakan perhitungan transien sehingga nilai arus simulasi lebih kecil. Hal ini disebabkan nilai dari rugi-rugi reaktif diperhitungkan. Tetapi hal ini tidak terlalu berpengaruh dalam menentukan setiap nilai tahanan start tanpa menggunakan perhitungan transien dan fungsi tahanan start untuk menurunkan nilai arus start dengan baik.
Hasil simulasi untuk kecepatan start motor DC Seri dengan thristor
controller didapat hasil sebagai berikut:
56 Gambar 4.30 Grafik n-t arus start Motor DC Seri dengan Thyristor Controller
dengan 2 tahanan start.
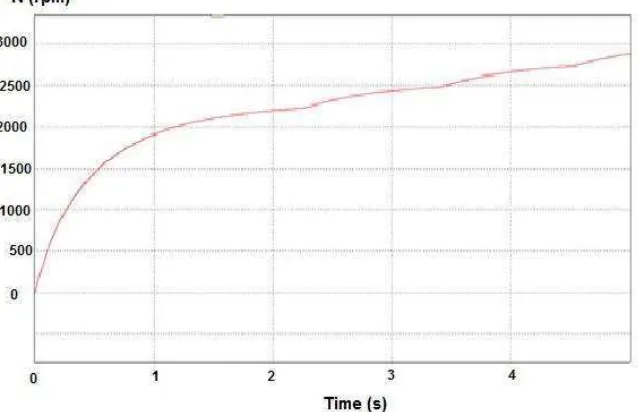
57 Gambar 4.32 Grafik n-t arus start Motor DC Seri 31,5 kW dengan Thyristor
Controller dengan 1 tahanan start
.
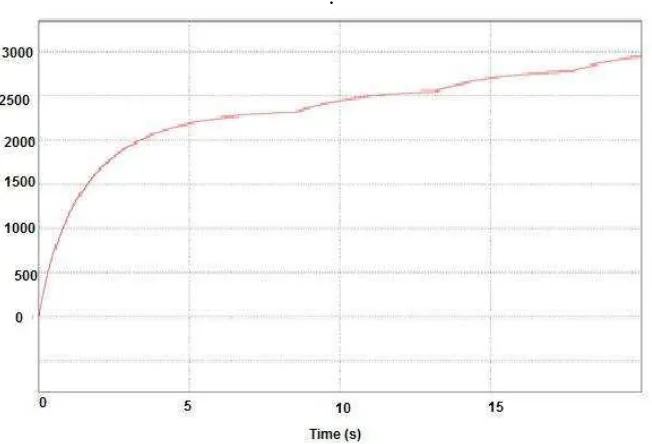
Gambar 4.33 Grafik n-t arus start Motor DC Seri 31,5 kW dengan Thyristor
Controller dengan 3 tahanan start.
58 BAB V
KESIMPULAN DAN SARAN
5.1 KESIMPULAN
1. Besar tahanan starting pada Motor DC Shunt dengan perbandingan arus maksimum dan arus minimum sama dengan 2 (4,44/2,22) ialah tahanan 1 sama dengan 20,27 ohm, tahanan 2 sama dengan 10,135 ohm dan tahanan 3 sama dengan 2,77 ohm. Perbandingan arus maksimum dan arus minimum sama dengan 3 (6,66/2,22) ialah tahanan 1 sama dengan 18,018 ohm dan tahanan 2 sama dengan 1,649 ohm. Perbandingan arus maksimum dan arus minimum sama dengan 4 (8,88/2,22) ialah tahanan 1 sama dengan 12,91 ohm.
2. Besar tahanan starting pada Motor DC Seri dengan perbandingan arus maksimum dan arus minimum sama dengan 1,5 (3,33/2,22)dengan 1 tahanan ialah tahanan 1 sama dengan 9,194 ohm. Perbandingan arus maksimum dan arus minimum sama dengan 1,5 (3,33/2,22)dengan 2 tahanan ialah tahanan 1 sama dengan 4.597 ohm dan tahanan 2 sama dengan 4.597 ohm. Perbandingan arus maksimum dan arus minimum sama dengan 1,5 (3,33/2,22)dengan 3 tahanan ialah tahanan 1 sama dengan 3,064 ohm, tahanan 2 sama dengan 3,064 ohm, dan tahanan 3 sama dengan 3,064 ohm.
59 4.Terdapat perbedaan antara perhitungan manual dengan perhitungan simulasi karena pada perhitungan manual tidak menggunakan tahanan reaktif tetapi hasil arus start perhitungan simulasi lebih kecil dari manual sehingga nilai tahanan yang dihitung dengan persamaan hitungan manual tetap dapat menurunkan arus start.
60 5.2 SARAN
5 BAB II
TINJAUAN PUSTAKA
2.1 Motor DC
2.1.1. Prinsip Kerja Motor DC
Motor listrik adalah mesin dimana mengkonversi energi listrik ke energi mekanik. Jika rotor pada mesin berotasi, sebuah tegangan akan terinduksi pada kumparan. Kumparan yang ditunjukkan berbentuk segi empat, dengan sisi ab dan cd tegak lurus dengan bidang halaman dan sisi bc dan da sejajar dengan bidang halaman seperti pada Gambar 2.1.
Gambar 2.1 Penampang kumparan rotor dari atas.[4]
6 Gambar 2.2 Penampang garis medan magnetik.[4]
Untuk mengetahui total tegangan induksi pada kumparan, setiap segmen harus diuji dan dijumlahkan setiap tegangan yg dihasilkan. Rumus yg digunakan ialah
eind = (v x B) • l (2.1)
dimana :
eind = tegangan induksi
v = kecepatan kumparan B = medan magnetik L = panjang kumparan.
7 eba = (v x B) • l
= vBI (saat di daerah kutub) = 0 (saat di ujung kutub)
2. Segmen bc. Di segmen ini, nilai v x B tidak kedalam atau keluar, dimana panjang kumparan l di bidang halaman , jadi v x B tegak lurus dengan l. karena itu tegangan pada segmen bc adalah nol.
ecb = 0
3. Segmen cd. Di segmen ini, kecepatan pada kumparan tagensial terhadap jalur rotasi. Medan magnetik B mengarah kedalam tegak lurus degan permukaan rotor pada setiap permukaan di daerah kutub dan menjadi nol saat berada di ujung kutub. Saat di daerah kutub, kecepatan v tegak lurus dengan B, dan nilai v x B mengarah keluar. Karena itu, nilai tegangan pada segmen ini ialah:
eDC ` =(v x B) • l
= vBl (saat di daerah kutub) = 0 ( saat di ujung kutub)
4. Segmen da. Seperti di segmen bc, v x B tegak lurus terhadap l. karena itu tegangan pada segmen sama dengan nol.
ead = 0
Total tegangan induksi pada kumparan ialah:
eind = eba + ecb + eDC + ead
eind = 2vBl (saat di daerah kutub)
8 Gambar 2.3 Penampang dari depan motor DC [4]
Ketika kumparan berputar 180˚, segmen ab berada di posisi segmen cd
sebelumnya. Saat itu, arah dari tegangan setiap segmen terbalik dari sebelumnya tetapi nilainya tetap sama. Tegangan induksi ini masih dalam bentuk tegangan bolak balik karena berbedanya arah tegangan induksi pada segmen ab dan cd. Untuk membuatnya menjadi tegangan searah maka perlu ditambahkan komutator pada ujung rotor.
Tegangan induksi ini berlawanan arah dengan tegangan supply utama. Arus dari selisih tegangan supply utama dan tegangan induksi pada rotor, atau disebut juga dengan arus armatur, jika rangkaian rotor dibuat tertutup.Saat kumparan berarus ini bereaksi degan medan magnetik sehingga kumparan akan mengalami gaya mekanik dimana arahnya sesuai dengan Hukum Tangan Kanan Fleming dan
besarnya yaitu F=BIl Newton (2.2)
dimana : F = gaya
9 l = panjang penghantar
Ketika medan magnet diberi penguatan dan konduktor armatur diberi arus dari supply utama, hal ini akan menyebabkan gaya mekanik yang akan memutar armatur. Setiap konduktor pada armatur akan mengalami gaya yang sama dan gaya ini akan menghasilkan torka yang membuat armatur berputar.
2.1.2. Persamaan Tegangan Motor DC
a. Persamaan Ekivalen Tegangan Motor DC Shunt Tegangan V pada armatur motor harus:
(i). melebihi ggl balik Eb dan
(ii) mensupply tengangan drop armatur IaRa
(2.3)
Persamaan diatas disebut sebagai persamaan tegangan pada Motor DC Shunt. Sekarang, dengan mengalikan kedua sisi dengan Ia, maka kita akan mendapatkan
persamaan daya pada Motor DC Shunt:
(2.4)
dimana:
VIa = Input elektrik ke armatur
EbIa= Ekivalen elektrik dari tenaga mekanik yang dihasilkan armatur
Ia2Ra= Rugi-rugi tembaga pada armatur
10 Gambar 2.4 Rangkaian ekivalen Motor DC Shunt.
b. persamaan ekivalen tegangan pada Motor DC Seri yaitu:
(2.5)
Bila kita mengalikan kedua sisi dengan Ia, maka kita akan mendapatkan
persamaan daya pada Motor DC Seri:
(2.6)
dimana:
VIa = Input elektrik ke armatur
EbIa = Ekivalen elektrik dari tenaga mekanik yang dihasilkan armatur
Ia2(Ra+Rf) = Rugi-rugi tembaga pada armatur dan pada medan Rangkain ekivalen Motor DC Seri dapat dilihat di Gambar 2.5.
V Eb v
I
I Series Field
Gambar 2.5 Rangkaian ekivalen Motor DC Seri.
Oleh sebab itu, keluaran dari input armatur, beberapa daya terbuang di rugi-rugi I2R dan sisanya diubah menjadi tenaga mekanik pada armatur. Perlu diperhatikan bahwa efisiensi motor ialah perbandingan antara daya yang
11 dihasilkan oleh armatur ke input, yaitu EbIa/VIa=Eb/V . Dengan jelas, bahwa
semakin tinggi nilai Eb yang dibandingkan pada V, semakin tinggi effisiensi
motor.
2.1.3. Starting Motor DC
Besar arus yang mengalir pada armatur Motor DC Shunt ialah:
(2.7)
dan pada Motor DC Seri ialah :
(2.8) dimana V adalah supply tegangan, Eb adalah ggl balik , Ra tahanan aramatur, dan
Rf tahanan medan.Ketika motor tidak bekerja maka tidak akan ada ggl balik yang
dihasilkan pada armatur (Eb=0). Jika tegangan supply diberikan secara penuh pada
12 arus start ke nilai yang aman. Tahanan starting akan berkurang secara bertahap ketika motor mencapai kecepatan dan menghasilkan ggl balik yang dapat mengatur kecepatannya sendiri.
Gambar 2.6 Rangkaian ekivalen Motor DC Shunt dengan tahanan tambahan terhubung seri.
Gambar 2.7 Rangkaian ekivalen Motor DC Seri dengan tahanan tambahan terhubung seri.
a.Pengurangan Tahanan Starting pada Motor Shunt
Tahapan pengurangan pada tahanan starting Motor DC Shunt dilakukan dengan cara menentukan jumlah tingkatan tahanan, nilai arus tertinggi, nilai arus terendah. Nilai arus terendah bergantung pada jumlah tingkatan tahan yang telah ditentukan. Hal ini dapat menunjukkan bahwa tingkatan tahanan pada rangkaian
V Shunt Field
Ia
13 dicari dengan menggunkan deret geometri, dimana rationya sama dengan arus terendah dibagi dengan arus tertinggi.
Gambar 2.8 Rangkain pengurangan tahanan mekanik.[1]
Pada Gambar 2.8 kita akan melihat bila lengan pada lengan A memiliki kontak dengan tingkatan no. 1, maka arus armatur langsung bernilai arus maksimum I1 yaitu I1 = V/R1 dimana R1= tahanan armatur dan tahanan start. Arus
maksimum I1 ialah nilai arus batasan tertinggi saat start. Ketika arus armatur turun
kenilai arus beban penuh yang bernilai I2 (disebut juga arus minimum), lengan A
bergerak ke tingkatan no.2. Misal nilai e.m.f. balik ialah Eb1, sesaat berpindah dari
tingkatan no.1 maka:
14 Ketika lengan A menyentuh di tingkatan no.2, maka arus akan kembali menuju nilai I1. Karena kecepatan belum berubah maka nilai e.m.f. balik akan menjadi
Bila lengan A bergerak ke tingkatan 3, maka nilai arus :
Bila lengan A bergerak ke tingkatan 3 maka nilai arus :
(2.16)
Dari persamaan (2.14) dan (2.15) kita akan mendapatkan
=
(2.17)
15
(2.18)
Jika n adalah jumlah dari tingkatan dan n-1 adalah jumlah resistor pada tingkatan maka:
(2.19)
Bentuk formula tingkatan tahanan ini dapat juga dilihat dibawah ini:
(2.20)
(2.21)
(2.22)
dimana :
K = ratio arus maksimum dengan arus minimum n = jumlah tingkatan
16 b.Pengurangan Tahanan Starting Pada Motor Seri
Pada prinsipnya mendesain pengurangan tahanan starting pada Motor Shunt dan Seri hampir sama.Tetapi terdapat satu perbedaan yang penting yaitu fluks medan tidak konstan tetapi bervariasi dengan nilai arus tahan armatur. Misal: I1 = Arus maksimum
I2 = Arus minimum Φ1 = fluks untuk I1
Φ2 = fluks untuk I2
I1/I2= K dan Φ1/Φ2= α
Pada kondisi lengan tingkatan berada di posisi ke n dan (n+1). Ketika arus berada di I2, maka Eb=V-I2Rn.
Sekarang, bila penstart bergerak ke (n+1), maka:
(2.23)
(2.24)
Sekarang, V/I1=R1 adalah tahanan total pada rangkaian ketika starter pada
tingkatan pertama.
(2.25)
Dengan mensubstitusi (n-1) ke n, maka kita mendapatkan
(2.26)
Maka tahanan antara ke n dan (n+1) dapat dilihat dibawah ini:
(2.27)
17
Dimana α=Φ1/Φ2 dan K=I1/I2. Dengan asumsi pada magnetisasi linear, maka I1≈ Φ1 dan I2≈Φ2 sehingga akan mendapatkan:
؞
I1/I2=Φ1/Φ2؞
α=K dan b= α/K = 1؞
Dengan kata lain, setiap tingkatan memiliki nilai tahanan yang sama.
(2.29)
dimana :
K = ratio arus maksimum dengan arus minimum
α = ratio fluks maksimum dengan fluks minimum
n = jumlah tingkatan
Rn = nilai tahanan pada tingkatan n
Ra = nilai tahanan armatur
Rf = nilai tahanan medan
rn = nilai tahanan ke-n
2.2 Thyristor
18 Gambar 2.11 Simbol Rangkaian Thyristor.[2]
Gambar 2.12 Karakteristik i-v Thyristor.[2]
Thyristor dapat dipicu menjadi keadaan on dengan memberikan pulsa arus
19 Ketika thyristor mulai terkonduksi, thyristor akan terpasang on (latch on) dan arus gate dapat dihilangkan. Thyristor tidak dapat dijadikan keadaan off oleh gate, dan thristor terkonduksi sama seperti dioda. Hanya jika arus anoda menjadi negatif, dibawah pengaruh dari rangkaian dimana thyristor terhubung, yang membuat thyristor menjadi keadaan off dan arus akan menjadi nol. Hal ini memberikan gate untuk mendapatkan kembali kendali untuk membuat keadaan on pada saat waktu yang terkendali setelah thyristor berada dikeadaan bias baju terblok.
Di bias mundur pada tegangan dibawah tegangan breakdown bias mundur, hanya sangat sedikit arus bocor yang mengalir pada thyristor, seperti pada Gambar 2.13. Biasanya rating tegangan thyristor untuk tegangan bias maju dan bias mundur adalah sama. Rating arus thyristor terspesifik pada kondisi rms maksimum dan arus rata-rata yang dapat dikonduksikan. Karakter ideal thyristor dapat ditunjukkan pada Gambar 2.13.
20 2.3 Start Motor DC dengan Thyristor Controller
21
V Shunt Field
I2
Sensor Arus
Gambar 2.9 Diagram rangkaian Motor DC Shunt dengan tahanan seri yang diatur dengan Thyristor Controller.
Sensor arus digunakan untuk memberi umpan balik kepada switch
thyristor agar thyristor menjadi terhubung sesaat arus pada aramatur mencapai
1 digunakan secara signifikan pada bagian mesin yang dikomersialkan setiap tahun sejak tahun 1960. Ada beberapa alasan mengapa Motor DC tetap popular digunakan walaupun sistem tenaga DC sangat jarang digunakan. Pertama, sistem tenaga DC sering digunakan di mobil, truk, dan pesawat terbang. Ketika sebuah kendaraan mempunyai sistem tenaga DC , maka akan lebih masuk akal untuk menggunakan Motor DC. Aplikasi Motor DC yang lainnya ialah situasi yang membutuhkan variasi kecepatan yang luas. Ketika penggunaan rectifier-inverters belum dipakai secara luas, Motor DC menjadi tak terkalahakan dalam hal aplikasi pengaturan kecepatan. Bahkan ketika tidak ada sumber tenaga DC , rangkaian penyerah dan chopper digunakan untuk membuat tenaga DC yang diinginkan, dan Motor DC digunakan untuk mneyediakan pengaturan kecepatan yang diinginkan.
Pada penggunaannya Motor DC akan mengalami arus start yang sangat besar pada rangkaian armaturnya. Hal ini disebabkan karena saat start motor belum berputar dan tidak ada ggl balik yang dihasilkan (Eb =0),
2 merusak komutator, sikat motor, dll. Untuk mengurangi arus yang sangat besar ini maka diberikan tahanan tambahan pada Motor DC yang terhubung seri dengan armatur. Tahanan tambahan ini tidak boleh diberikan secara permanan karena dapat menjadi rugi-rugi tambahan dan mengurangi karakteristik torka-speed Motor DC. Maka tahanan tambahan ini harus berkurang seiring dengan kenaikan kecepatan motor dan penambahan ggl balik. Karena itu dibutuhkan metode starting agar motor dapat mengurangi arus start yang sangat besar tersebut.
Penulis memakai metode start Motor DC Shunt dan Motor DC Seri dengan thyristor controller dalam tugas akhir ini. Thyristor controller akan mengurangi tahanan tambahan ini seiring dengan batasan arus terendah dan arus tertinggi yang diinginkan. Thyristor controller juga akan bekerja secara otomatis untuk mengurangi tahanan tambahan start seusai dengan respon arus start.
1.2 Perumusan Masalah
Dari latar belakang di atas, maka dapat dirumuskan beberapa permasalahan antara lain :
1. Bagaimana merancang sebuah thyristor controller starter?
2. Bagaimana menentukan jumlah dan besaran dalam merancang thyristor
controller starter?
3 1.3 Batasan Masalah
Untuk membatasi materi yang akan dibicarakan pada tugas akhir ini, maka penulis perlu membuat batasan cakupan masalah yang akan dibahas. Hal ini diperbuat supaya isi dan pembahasan dari tugas akhir ini menjadi lebih terarah dan dapat mencapai hasil yang diharapkan. Maka penulis membatasi penulisan Tugas Akhir ini dengan hal-hal sebagai berikut :
a) Pengukuran arus, tegangan, kecepatan putar motor dilakukan pada kondisi ideal.
b) Dilakukan dengan menggunakan simulasi pada software PSIM Ver.9.0. c) Motor yang digunakan ialah Motor DC Shunt dan Motor DC Seri
1.4 Tujuan
Tujuan dari penulisan tugas akhir ini adalah mengetahui start Motor DC Shunt dan Motor DC Seri dengan menggunakan thyristor controller.
1.5 Manfaat
Manfaat yang diharapkan dari penulisan Tugas Akhir ini adalah mengetahui start Motor DC Shunt dan Motor DC Seri dengan mengggunakan thyristor
controller. Tugas Akhir ini juga diharapkan dapat membantu untuk menganalisa
4 1.6 Sistematika Penulisan
Tugas Akhir ini akan dibagi menjadi lima bab dengan sistematika penulisan sebagai berikut:
BAB I PENDAHULUAN
Bab ini berisi latar belakang, perumusan masalah, batasan masalah, tujuan
dan manfaat penelititan, dan sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Bab ini membahas tentang teori yang menunjang Tugas Akhir ini. Teori
tersebut yaitu Motor DC, persamaan ekivalen Motor DC, starting Motor DC,
starter thyristor controller dan thyristor.
BAB III METODE PENELITIAN
Bab ini berisi tentang tempat dan bahan dan peralatan penelitian, variabel
yang diamati, prosedur penelitian.
BAB IV HASIL DAN PEMBAHASAN
Bab ini berisi tentang data hasil penelitian dan analisis data.
BAB V KESIMPULAN DAN SARAN
Bab ini merupakan bab penutup yang berisi kesimpulan dari Tugas Akhir
i ABSTRAK
Motor listrik adalah mesin yang mengkonversi energi listrik ke energi mekanik. Ketika motor tidak bekerja maka tidak akan ada ggl balik yang dihasilkan pada armatur. Jika tegangan supply diberikan secara penuh pada armatur , armatur akan menyerap arus yang sangat besar karena tahanan armatur yang relatif kecil. Arus yang besar ini akan mentrip fuse dan akan merusak komutator dan sikat motor. Untuk mencegah hal ini, sebuah tahanan tambahan diberikan secara seri pada armatur (sepanjang durasi periode start, misalkan 5 sampai 10 detik) yang akan membatasi arus start ke nilai yang aman. Tahanan starting akan berkurang secara bertahap ketika motor mencapai kecepatan dan menghasilkan ggl balik yang dapat mengatur kecepatannya sendiri. Tugas akhir ini mensimulasikan start Motor DC Shunt dan Motor DC Seri dengan thyristor controller sesuai dengan respon arus start. Hasil yang diperoleh bahwa pada start Motor DC Shunt dan Motor DC Seri dengan menggunakan thyristor controller dapat menurunkan arus start ke nilai yg aman dan mengurangi tahanan starting secara bertahap.
START MOTOR DC SHUNT DAN MOTOR DC SERI DENGAN
THYRISTOR CONTROLLER SESUAI DENGAN RESPON ARUS START
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Sub Konsentrasi Teknik Energi Listrik
Oleh
EVAN F.O. MANURUNG
NIM : 090402051
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
START MOTOR DC SHUNT DAN MOTOR DC SERI DENGAN
THYRISTOR CONTROLLER SESUAI DENGAN RESPON ARUS START
Oleh :
EVAN F.O. MANURUNG NIM : 090402051
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar Sarjana Teknik pada
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada Tanggal 18 Bulan November Tahun 2015 di depan penguji :
1. Ketua Penguji : Ir. Riswan Dimzi, M.T.
(Ir. Surya Tarmizi Kasim, M.Si.) NIP : 19540531 198601 1 002
i ABSTRAK
Motor listrik adalah mesin yang mengkonversi energi listrik ke energi mekanik. Ketika motor tidak bekerja maka tidak akan ada ggl balik yang dihasilkan pada armatur. Jika tegangan supply diberikan secara penuh pada armatur , armatur akan menyerap arus yang sangat besar karena tahanan armatur yang relatif kecil. Arus yang besar ini akan mentrip fuse dan akan merusak komutator dan sikat motor. Untuk mencegah hal ini, sebuah tahanan tambahan diberikan secara seri pada armatur (sepanjang durasi periode start, misalkan 5 sampai 10 detik) yang akan membatasi arus start ke nilai yang aman. Tahanan starting akan berkurang secara bertahap ketika motor mencapai kecepatan dan menghasilkan ggl balik yang dapat mengatur kecepatannya sendiri. Tugas akhir ini mensimulasikan start Motor DC Shunt dan Motor DC Seri dengan thyristor controller sesuai dengan respon arus start. Hasil yang diperoleh bahwa pada start Motor DC Shunt dan Motor DC Seri dengan menggunakan thyristor controller dapat menurunkan arus start ke nilai yg aman dan mengurangi tahanan starting secara bertahap.
ii KATA PENGANTAR
Penulis memanjatkan puji dan syukur kepada Tuhan Yang Maha Esa atas berkat dan hikmat yang diberikanNya sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul “START MOTOR DC SHUNT DAN MOTOR DC SERI DENGAN THYRISTOR CONTROLLER SESUAI DENGAN RESPON ARUS
START”. Tugas Akhir ini merupakan syarat untuk menyelesaikan pendidikan Sarjana Strata Satu di Departemen Teknik Elektro, Universitas Sumatera Utara.
Penulis menyadari bahwa dalam selama masa kuliah dan pengerjaan Tugas Akhir ini, penulis mendapat banyak dukungan, bimbingan, dan bantuan dari berbagai pihak. Oleh karena itu, penulis ingin mengucapkan terima kasih kepada:
1. Kedua orang tua, Drs.D.Manurung dan Drs. D. Hutagaol, adik dan semua keluarga yang telah mendoakan dan memberikan banyak bantuan selama penulis menjalani masa perkuliahan.
2. Bapak Ir. Syamsul Amin M.S., selaku Dosen Pembimbing Tugas Akhir yang telah memberikan banyak bimbingan dan pengarahan dalam menyelesaikan Tugas Akhir ini.
3. Bapak Ir. Raja Harahap, M.T., selaku Dosen Penguji Tugas Akhir yang telah banyak memberikan masukan demi perbaikan Tugas Akhir ini.
iii 5. Bapak Ir. Surya Tarmizi Kasim, M.si., selaku Ketua Departemen Teknik Elektro FT USU serta Bapak Rachmad Fauzi S.T., M.T. selaku sekretaris Departemen Teknik Elektro FT USU yang banyak memberi motivasi selama penulis menjalani kuliah.
6. Seluruh Bapak dan Ibu dosen yang telah mendidik penulis selama masa perkuliahan.
7. Seluruh staf pegawai Departemen Teknik Elektro FT USU yang telah membantu penulis dalam pengurusan administrasi, terkhusunya Bang Martin atas bimbingan administrasi kampus.
8. Kelompok Lost Child (Bang Bonar, Rianto, Leo, Adventus, Jhon Palmer), dan adik-adikku (Miska, Dewi, Sarah, Ami, Andre, Arvinta, Anita), terima kasih untuk dukungan, bantuan, semangat, dan doanya selama ini.
9. Keluarga Harmonika 76 ( Bang Baga, Iqnatius, Hans, Tommy, Ramson, Yuki, dan Lela), terima kasih untuk dukungan, doa, dan kebersamaannya.
10.Teman-teman pelayanan UKM KMK USU UP FT, terima kasih untuk dukungan dan doanya selama ini.
iv 12.Seluruh abang dan kakak senior serta adik-adik junior yang telah
memberi dukungan dan bantuan.
13.Semua pihak yang tidak dapat penulis sebutkan satu persatu.
Penulis menyadari bahwa Tugas Akhir ini masih belum sempurna. Oleh karena itu, penulis mengharapkan kritik dan saran dalam rangka memperbaiki dan melengkapi Tugas Akhir ini. Penulis mengharapkan semoga Tugas Akhir ini dapat berguna dan dikembangkan di kemudian hari.
Medan, Juli 2015 Penulis
v DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... vii
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Perumusan Masalah ... 2
1.3 Batasan Masalah ... 3
1.4 Tujuan ... 3
1.5 Manfaat ... 3
1.6 Sistematika Penulisan ... 3
BAB II TINJAUAN PUSTAKA 2.1 Motor DC ... 5
2.1.1 Prinsip Kerja Motor DC ... 5
2.1.2 Persamaan Tegangan Motor DC ... 9
vi
2.2 Thyristor ... 17
2.3 Start Motor DC dengan Thyristor Controller ... 20
BAB III METODE PENELITIAN 3.1 Bahan dan Peralatan ... 23
3.4 Variabel yang Diamati ... 23
3.5 Prosedur Penelitian ... 23
BAB IV HASIL DAN PEMBAHASAN 4.1 Persiapan Data ... 25
4.1.1 Motor DC Shunt ... 25
4.1.2 Motor DC Seri ... 26
4.1.3 Tahanan Starting Motor DC Shunt ... 27
4.1.4 Tahanan Starting Motor DC Seri ... 30
4.1.5 Rangkain Sensor Start Motor DC Shunt ... 32
4.1.6 Rangkain Sensor Start Motor DC Seri ... 33
4.1.7 Rangkain Start Motor DC Shunt dengan Thyristor Controller.34 4.1.8 Rangkain Start Motor DC Seri dengan Thyristor Controller... 35
4.2 Hasil Simulasi Start Motor DC Shunt ... 37
4.3 Hasil Simulasi Start Motor DC Seri ... 48
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 58
vii
DAFTAR PUSTAKA ... 61
LAMPIRAN DAFTAR GAMBAR Gambar 2.1 Penampang kumparan rotor dari atas…..………..………..5
Gambar 2.2 Penampang garis medan magnetik……..……….6
Gambar 2.3 Penampang dari depan Motor DC ………...8
Gambar 2.4 Rangkaian ekivalen Motor DC Shunt.……..………..………...10
Gambar 2.5 Rangkaian ekivalen Motor DC Seri ………..10
Gambar 2.6 Rangkaian ekivalen Motor DC Shunt dengan tahanan tambahan terhubung seri……….……….………...12
Gambar 2.7 Rangkaian ekivalen Motor DC Seri dengan tahanan tambahan terhubung seri ……….………...12
Gambar 2.8 Rangkain pengurangan tahanan mekanik…...………...13
Gambar 2.8 Diagram rangkaian Motor DC Shunt dengan tahanan seri yang diatur dengan Thyristor Controller ……...…...………...…………...18
Gambar 2.10 Grafik Arus –Waktu saat start dengan tahanan seri .………...19
Gambar 2.11 Simbol Rangkaian Thyristor ………...20
Gambar 2.12 Karakteristik i-v Thyristor ………...20
Gambar 2.12 Karakteristik ideal i-v Thyristor ………...…………...21
Gambar 3.1 Flowchart pensimulasian start Motor DC Shunt dan motor DC Seri dengan Thyristor Contorller ………..……….…….………...23
Gambar 4.1 Diagram rangkaian start Motor DC Shunt dengan Thyristor Controller….………...32
viii Gambar 4.3 Diagram rangkaian start Motor DC Seri dengan Thyristor
Controller………....33
Gambar 4.4 Rangkain Start Motor DC Shunt dengan Thyristor Controller dimana arus start 4 kali arus nominal……….………..……...34 Gambar 4.5 Rangkain Start Motor DC Shunt dengan Thyristor Controller
dimana arus start 3 kali arus nominal……….………..……...35 Gambar 4.6 Rangkain Start Motor DC Shunt dengan Thyristor Controller
dimana arus start 2 kali arus nominal………….…………..……...35 Gambar 4.7 Rangkain Start Motor DC Seri dengan Thyristor Controller dimana memiliki 1 tahanan start………..……….…..………..36 Gambar 4.8 Rangkain Start Motor DC Seri dengan Thyristor Controller
Controller dimana memiliki 2 tahanan start ………..………...…..36
Gambar 4.9 Rangkain Start Motor DC Seri dengan Thyristor Controller
Controller dimana memiliki 3 tahanan start ………….…………..37
Gambar 4.10 Grafik i-t arus start Motor DC Shunt tanpa Thyristor
Controller…..…….……….………38
Gambar 4.11 Grafik i-t arus start Motor DC Shunt 31,5 kW tanpa Thyristor
Controller…..…….……….………38
Gambar 4.12 Grafik i-t arus start Motor DC Shunt dengan Thyristor Controller dimana arus start 4 kali arus nominal. ………...…….39 Gambar 4.13 Grafik i-t arus start Motor DC Shunt dengan Thyristor Controller
dimana arus start 3 kali arus nominal. ………...…….41 Gambar 4.14 Grafik i-t arus start Motor DC Shunt dengan Thyristor Controller
ix Gambar 4.15 Grafik i-t arus start Motor DC Shunt 31,5 kW dengan Thyristor
Controller dimana arus start 4 kali arus
nominal………..…….………...44
Gambar 4.16 Grafik i-t arus start Motor DC Shunt 31,5 kW dengan Thyristor
Controller dimana arus start 1,75 kali arus
nominal………..…….………...45
Gambar 4.17 Grafik n-t arus start Motor DC Shunt dengan Thyristor Controller dimana arus start 4 kali arus nominal……….………...46 Gambar 4.18 Grafik n-t arus start Motor DC Shunt dengan Thyristor Controller
dimana arus start 3 kali arus nominal ……….…...47 Gambar 4.19 Grafik n-t arus start Motor DC Shunt dengan Thyristor Controller
dimana arus start 2 kali arus nominal……….………...47 Gambar 4.20 Grafik n-t arus start Motor DC Shunt 31,5 kW dengan Thyristor
Controller dimana arus start 4 kali arus
nominal……….………..…...48
Gambar 4.21 Grafik n-t arus start Motor DC Shunt 31,5 kW dengan Thyristor
Controller dimana arus start 2 kali arus
nominal……….………..…...48
Gambar 4.22 Grafik i-t arus start Motor DC Seri tanpa Thyristor
Controller……...………….………....49
Gambar 4.23 Grafik i-t arus start Motor DC Seri 31,5 kW tanpa Thyristor
Controller……...………….………....49
x Gambar 4.25 Grafik i-t arus start Motor DC Seri dengan Thyristor Controller
dengan 2 tahanan start ………...………….…………...…...51 Gambar 4.26 Grafik i-t arus start Motor DC Seri dengan Thyristor Controller
dengan 3 tahanan start ……...……….………...…...52 Gambar 4.27 Grafik i-t arus start Motor DC Seri 31,5 kW dengan Thyristor
Controller dengan 1 tahanan start
……...……….………...…...53 Gambar 4.28 Grafik i-t arus start Motor DC Seri 31,5 kW dengan Thyristor
Controller dengan 3 tahanan start
……...……….………...…...54 Gambar 4.29 Grafik n-t arus start Motor DC Seri dengan Thyristor Controller
dengan 1 tahanan start ……...……….……...…...55 Gambar 4.30 Grafik n-t arus start Motor DC Seri dengan Thyristor Controller
dengan 2 tahanan start …...……….…...…...56 Gambar 4.31 Grafik n-t arus start Motor DC Seri dengan Thyristor Controller
dengan 3 tahanan start ……...……….…...…...56 Gambar 4.32 Grafik n-t arus start Motor DC Seri 31,5 kWdengan Thyristor
Controller dengan 1 tahanan start
……...……….…...…...57 Gambar 4.33 Grafik n-t arus start Motor DC Seri 31,5 kWdengan Thyristor
Controller dengan 3 tahanan start
xi DAFTAR TABEL
Tabel 4.1 Hasil simulasi waktu dan arus puncak 1 tahanan Motor DC
Shunt….………...…...39
Tabel 4.2 Hasil perhitunganarus puncak 1 tahanan Motor DC
Shunt...…………..………...…...41 Tabel 4.3 Hasil simulasi waktu dan arus puncak 2 tahanan Motor DC
Shunt…...………..………...…...42 Tabel 4.4 Hasil perhitungan arus puncak 2 tahanan Motor DC
Shunt……...………..………...…...42 Tabel 4.5 Hasil simulasi waktu dan arus puncak 3 tahanan Motor DC
Shunt……...…………..………...…...43 Tabel 4.6 Hasil perhitungan arus puncak 3 tahanan Motor DC
Shunt……….………...…...43
Tabel 4.7 Hasil simulasi waktu dan arus puncak 1 tahanan Motor DC Shunt 31,5
kW………...…………..………...…...44
Tabel 4.8 Hasil perhitungan arus puncak 1 tahanan Motor DC Shunt 31,5
kW………….………...…...44
Tabel 4.9 Hasil simulasi waktu dan arus puncak 1 tahanan Motor DC Shunt 31,5
kW………...…………..………...…...45
Tabel 4.10 Hasil perhitungan arus puncak 3 tahanan Motor DC Shunt 31,5
kW………….………...…...46
Tabel 4.11Hasil simulasi waktu dan arus puncak 3 tahanan Motor DC
xii Tabel 4.12 Hasil perhitungan arus puncak 1 tahanan Motor DC
Seri....………...…...50 Tabel 4.13 Hasil simulasi waktu dan arus puncak 2 tahanan Motor DC
Seri...…..………...………...…...51 Tabel 4.14 Hasil perhitungan arus puncak 2 tahanan Motor DC
Seri...………….………...…...51
Tabel 4.15 Hasil simulasi waktu dan arus puncak 3 tahanan Motor DC
Seri...….………...…...52
Tabel 4.16 Hasil perhitungan arus puncak 3 tahanan Motor DC
Seri...……...………..…………...…...53 Tabel 4.17 Hasil simulasi waktu dan arus puncak 1 tahanan Motor DC Seri 31,5
kW...….………...…...53
Tabel 4.18 Hasil perhitungan arus puncak 1 tahanan Motor DC Seri 31,5
kW...……...………..…………...…...53 Tabel 4.19 Hasil simulasi waktu dan arus puncak 3 tahanan Motor DC Seri 31,5
kW...….………...…...54
Tabel 4.20 Hasil perhitungan arus puncak 3 tahanan Motor DC Seri 31,5
![Gambar 2.1 Penampang kumparan rotor dari atas.[4]](https://thumb-ap.123doks.com/thumbv2/123dok/853617.609007/40.595.229.423.358.605/gambar-penampang-kumparan-rotor-dari-atas.webp)
![Gambar 2.2 Penampang garis medan magnetik.[4]](https://thumb-ap.123doks.com/thumbv2/123dok/853617.609007/41.595.141.497.84.311/gambar-penampang-garis-medan-magnetik.webp)
![Gambar 2.3 Penampang dari depan motor DC [4]](https://thumb-ap.123doks.com/thumbv2/123dok/853617.609007/43.595.174.450.85.284/gambar-penampang-dari-depan-motor-dc.webp)
