5 BAB II
TINJAUAN PUSTAKA
2.1 Motor DC
2.1.1. Prinsip Kerja Motor DC
Motor listrik adalah mesin dimana mengkonversi energi listrik ke energi mekanik. Jika rotor pada mesin berotasi, sebuah tegangan akan terinduksi pada kumparan. Kumparan yang ditunjukkan berbentuk segi empat, dengan sisi ab dan cd tegak lurus dengan bidang halaman dan sisi bc dan da sejajar dengan bidang halaman seperti pada Gambar 2.1.
Gambar 2.1 Penampang kumparan rotor dari atas.[4]
6 Gambar 2.2 Penampang garis medan magnetik.[4]
Untuk mengetahui total tegangan induksi pada kumparan, setiap segmen harus diuji dan dijumlahkan setiap tegangan yg dihasilkan. Rumus yg digunakan ialah
eind = (v x B) • l (2.1)
dimana :
eind = tegangan induksi v = kecepatan kumparan B = medan magnetik L = panjang kumparan.
7 eba = (v x B) • l
= vBI (saat di daerah kutub) = 0 (saat di ujung kutub)
2. Segmen bc. Di segmen ini, nilai v x B tidak kedalam atau keluar, dimana panjang kumparan l di bidang halaman , jadi v x B tegak lurus dengan l. karena itu tegangan pada segmen bc adalah nol.
ecb = 0
3. Segmen cd. Di segmen ini, kecepatan pada kumparan tagensial terhadap jalur rotasi. Medan magnetik B mengarah kedalam tegak lurus degan permukaan rotor pada setiap permukaan di daerah kutub dan menjadi nol saat berada di ujung kutub. Saat di daerah kutub, kecepatan v tegak lurus dengan B, dan nilai v x B mengarah keluar. Karena itu, nilai tegangan pada segmen ini ialah:
eDC ` =(v x B) • l
= vBl (saat di daerah kutub) = 0 ( saat di ujung kutub)
4. Segmen da. Seperti di segmen bc, v x B tegak lurus terhadap l. karena itu tegangan pada segmen sama dengan nol.
ead = 0
Total tegangan induksi pada kumparan ialah:
eind = eba + ecb + eDC + ead
eind = 2vBl (saat di daerah kutub)
8 Gambar 2.3 Penampang dari depan motor DC [4]
Ketika kumparan berputar 180˚, segmen ab berada di posisi segmen cd
sebelumnya. Saat itu, arah dari tegangan setiap segmen terbalik dari sebelumnya tetapi nilainya tetap sama. Tegangan induksi ini masih dalam bentuk tegangan bolak balik karena berbedanya arah tegangan induksi pada segmen ab dan cd. Untuk membuatnya menjadi tegangan searah maka perlu ditambahkan komutator pada ujung rotor.
Tegangan induksi ini berlawanan arah dengan tegangan supply utama. Arus dari selisih tegangan supply utama dan tegangan induksi pada rotor, atau disebut juga dengan arus armatur, jika rangkaian rotor dibuat tertutup.Saat kumparan berarus ini bereaksi degan medan magnetik sehingga kumparan akan mengalami gaya mekanik dimana arahnya sesuai dengan Hukum Tangan Kanan Fleming dan
besarnya yaitu F=BIl Newton (2.2)
dimana : F = gaya
9 l = panjang penghantar
Ketika medan magnet diberi penguatan dan konduktor armatur diberi arus dari supply utama, hal ini akan menyebabkan gaya mekanik yang akan memutar armatur. Setiap konduktor pada armatur akan mengalami gaya yang sama dan gaya ini akan menghasilkan torka yang membuat armatur berputar.
2.1.2. Persamaan Tegangan Motor DC
a. Persamaan Ekivalen Tegangan Motor DC Shunt Tegangan V pada armatur motor harus:
(i). melebihi ggl balik Eb dan
(ii) mensupply tengangan drop armatur IaRa
(2.3) Persamaan diatas disebut sebagai persamaan tegangan pada Motor DC Shunt. Sekarang, dengan mengalikan kedua sisi dengan Ia, maka kita akan mendapatkan
persamaan daya pada Motor DC Shunt:
(2.4)
dimana:
VIa = Input elektrik ke armatur
EbIa= Ekivalen elektrik dari tenaga mekanik yang dihasilkan armatur
Ia2Ra= Rugi-rugi tembaga pada armatur
10 Gambar 2.4 Rangkaian ekivalen Motor DC Shunt.
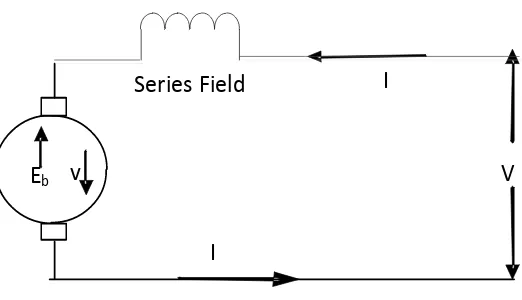
b. persamaan ekivalen tegangan pada Motor DC Seri yaitu:
(2.5)
Bila kita mengalikan kedua sisi dengan Ia, maka kita akan mendapatkan
persamaan daya pada Motor DC Seri:
(2.6)
dimana:
VIa = Input elektrik ke armatur
EbIa = Ekivalen elektrik dari tenaga mekanik yang dihasilkan armatur
Ia2(Ra+Rf) = Rugi-rugi tembaga pada armatur dan pada medan Rangkain ekivalen Motor DC Seri dapat dilihat di Gambar 2.5.
V Eb v
I
I Series Field
Gambar 2.5 Rangkaian ekivalen Motor DC Seri.
Oleh sebab itu, keluaran dari input armatur, beberapa daya terbuang di rugi-rugi I2R dan sisanya diubah menjadi tenaga mekanik pada armatur. Perlu diperhatikan bahwa efisiensi motor ialah perbandingan antara daya yang
11 dihasilkan oleh armatur ke input, yaitu EbIa/VIa= Eb/V . Dengan jelas, bahwa semakin tinggi nilai Eb yang dibandingkan pada V, semakin tinggi effisiensi
motor.
2.1.3. Starting Motor DC
Besar arus yang mengalir pada armatur Motor DC Shunt ialah:
(2.7) dan pada Motor DC Seri ialah :
(2.8) dimana V adalah supply tegangan, Eb adalah ggl balik , Ra tahanan aramatur, dan
Rf tahanan medan.Ketika motor tidak bekerja maka tidak akan ada ggl balik yang
dihasilkan pada armatur (Eb=0). Jika tegangan supply diberikan secara penuh pada
12 arus start ke nilai yang aman. Tahanan starting akan berkurang secara bertahap ketika motor mencapai kecepatan dan menghasilkan ggl balik yang dapat mengatur kecepatannya sendiri.
Gambar 2.6 Rangkaian ekivalen Motor DC Shunt dengan tahanan tambahan terhubung seri.
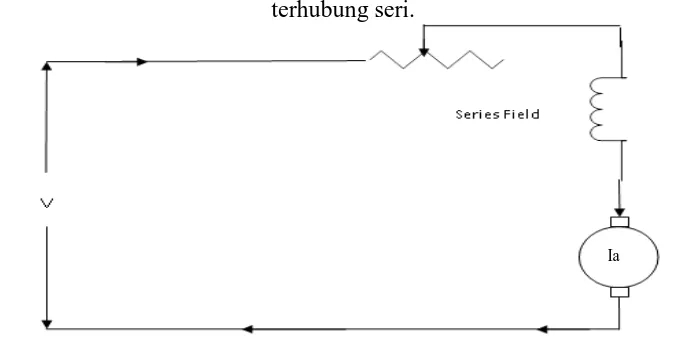
Gambar 2.7 Rangkaian ekivalen Motor DC Seri dengan tahanan tambahan terhubung seri.
a.Pengurangan Tahanan Starting pada Motor Shunt
Tahapan pengurangan pada tahanan starting Motor DC Shunt dilakukan dengan cara menentukan jumlah tingkatan tahanan, nilai arus tertinggi, nilai arus terendah. Nilai arus terendah bergantung pada jumlah tingkatan tahan yang telah ditentukan. Hal ini dapat menunjukkan bahwa tingkatan tahanan pada rangkaian
V Shunt Field
Ia
13 dicari dengan menggunkan deret geometri, dimana rationya sama dengan arus terendah dibagi dengan arus tertinggi.
Gambar 2.8 Rangkain pengurangan tahanan mekanik.[1]
Pada Gambar 2.8 kita akan melihat bila lengan pada lengan A memiliki kontak dengan tingkatan no. 1, maka arus armatur langsung bernilai arus maksimum I1 yaitu I1 = V/R1 dimana R1= tahanan armatur dan tahanan start. Arus
maksimum I1 ialah nilai arus batasan tertinggi saat start. Ketika arus armatur turun
kenilai arus beban penuh yang bernilai I2 (disebut juga arus minimum), lengan A
bergerak ke tingkatan no.2. Misal nilai e.m.f. balik ialah Eb1, sesaat berpindah dari
tingkatan no.1 maka:
14 Ketika lengan A menyentuh di tingkatan no.2, maka arus akan kembali menuju nilai I1. Karena kecepatan belum berubah maka nilai e.m.f. balik akan menjadi
Bila lengan A bergerak ke tingkatan 3, maka nilai arus :
Bila lengan A bergerak ke tingkatan 3 maka nilai arus :
(2.16)
Dari persamaan (2.14) dan (2.15) kita akan mendapatkan
=
(2.17)
15
(2.18)
Jika n adalah jumlah dari tingkatan dan n-1 adalah jumlah resistor pada tingkatan maka:
(2.19)
Bentuk formula tingkatan tahanan ini dapat juga dilihat dibawah ini:
(2.20)
(2.21)
(2.22)
dimana :
K = ratio arus maksimum dengan arus minimum n = jumlah tingkatan
16 b.Pengurangan Tahanan Starting Pada Motor Seri
Pada prinsipnya mendesain pengurangan tahanan starting pada Motor Shunt dan Seri hampir sama.Tetapi terdapat satu perbedaan yang penting yaitu fluks medan tidak konstan tetapi bervariasi dengan nilai arus tahan armatur. Misal: I1 = Arus maksimum
I2 = Arus minimum Φ1 = fluks untuk I1
Φ2 = fluks untuk I2
I1/I2= K dan Φ1/Φ2= α
Pada kondisi lengan tingkatan berada di posisi ke n dan (n+ 1). Ketika arus berada di I2, maka Eb=V-I2Rn.
Sekarang, bila penstart bergerak ke (n+ 1), maka:
(2.23)
(2.24) Sekarang, V/I1=R1 adalah tahanan total pada rangkaian ketika starter pada
tingkatan pertama.
(2.25)
Dengan mensubstitusi (n-1) ke n, maka kita mendapatkan
(2.26)
Maka tahanan antara ke n dan (n+ 1) dapat dilihat dibawah ini:
(2.27)
17
Dimana α=Φ1/Φ2 dan K=I1/I2. Dengan asumsi pada magnetisasi linear, maka I1≈ Φ1 dan I2≈Φ2 sehingga akan mendapatkan:
؞
I1/I2=Φ1/Φ2؞
α=K dan b= α/K = 1؞
Dengan kata lain, setiap tingkatan memiliki nilai tahanan yang sama.
(2.29)
dimana :
K = ratio arus maksimum dengan arus minimum
α = ratio fluks maksimum dengan fluks minimum
n = jumlah tingkatan
18 Gambar 2.11 Simbol Rangkaian Thyristor.[2]
Gambar 2.12 Karakteristik i-v Thyristor.[2]
19 Ketika thyristor mulai terkonduksi, thyristor akan terpasang on (latch on) dan arus gate dapat dihilangkan. Thyristor tidak dapat dijadikan keadaan off oleh gate, dan thristor terkonduksi sama seperti dioda. Hanya jika arus anoda menjadi negatif, dibawah pengaruh dari rangkaian dimana thyristor terhubung, yang membuat thyristor menjadi keadaan off dan arus akan menjadi nol. Hal ini memberikan gate untuk mendapatkan kembali kendali untuk membuat keadaan on pada saat waktu yang terkendali setelah thyristor berada dikeadaan bias baju terblok.
Di bias mundur pada tegangan dibawah tegangan breakdown bias mundur, hanya sangat sedikit arus bocor yang mengalir pada thyristor, seperti pada Gambar 2.13. Biasanya rating tegangan thyristor untuk tegangan bias maju dan bias mundur adalah sama. Rating arus thyristor terspesifik pada kondisi rms maksimum dan arus rata-rata yang dapat dikonduksikan. Karakter ideal thyristor
dapat ditunjukkan pada Gambar 2.13.
20 2.3 Start Motor DC dengan ThyristorController
Penambahan tahanan tambahan pada armatur motor saat start dapat mengurangi arus start ke batas yang aman. Saat motor mencapai kecepatan kerjanya maka tahanan ini harus berkurang secara bertahap. Pengurangan tahanan ini dapat dilakukan secara manual atau otomatis. Bentuk sederhana dari rangkaian pengurangan tahanan dapat dilihat di Gambar 2.9. Bila secara manual maka, pengguna motor listrik harus menggeser tuas kontrol pengatur tahanan armatur motor. Bila secara otomatis maka motor akan secara otomatis mengurangi besar tahanan sampai motor mencapai kecepatan kerjanya. Pengurangan otomatis ini dapat dilakukan dengan control otomatis dengan menggunakan magnetik kontaktor. Selain itu magnetik kontaktor dapat di ganti dengan thyristor. Thyristor
21
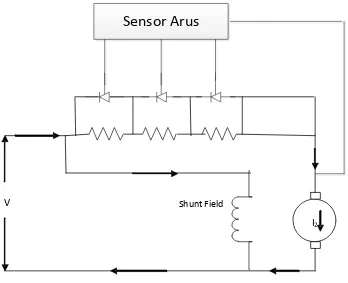
V Shunt Field
I2
Sensor Arus
Gambar 2.9 Diagram rangkaian Motor DC Shunt dengan tahanan seri yang diatur dengan Thyristor Controller.
Sensor arus digunakan untuk memberi umpan balik kepada switch
![Gambar 2.1 Penampang kumparan rotor dari atas.[4]](https://thumb-ap.123doks.com/thumbv2/123dok/1772073.1127434/1.595.229.423.358.605/gambar-penampang-kumparan-rotor-dari-atas.webp)
![Gambar 2.2 Penampang garis medan magnetik.[4]](https://thumb-ap.123doks.com/thumbv2/123dok/1772073.1127434/2.595.141.497.84.311/gambar-penampang-garis-medan-magnetik.webp)
![Gambar 2.3 Penampang dari depan motor DC [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1772073.1127434/4.595.174.450.85.284/gambar-penampang-dari-depan-motor-dc.webp)
![Gambar 2.8 Rangkain pengurangan tahanan mekanik.[1]](https://thumb-ap.123doks.com/thumbv2/123dok/1772073.1127434/9.595.112.528.137.483/gambar-rangkain-pengurangan-tahanan-mekanik.webp)
![Gambar 2.12 Karakteristik i-v Thyristor.[2]](https://thumb-ap.123doks.com/thumbv2/123dok/1772073.1127434/14.595.245.404.86.275/gambar-karakteristik-i-v-thyristor.webp)
![Gambar 2.13 Karakteristik Ideal i-v Thyristor.[2]](https://thumb-ap.123doks.com/thumbv2/123dok/1772073.1127434/15.595.156.498.472.693/gambar-karakteristik-ideal-i-v-thyristor.webp)
![Gambar 2.10 Grafik Arus –Waktu saat start dengan tahanan seri.[1]](https://thumb-ap.123doks.com/thumbv2/123dok/1772073.1127434/18.595.158.466.84.333/gambar-grafik-arus-waktu-start-tahanan-seri.webp)
