APLIKASI MIKROKONTROLER AT89S51 UNTUK SISTEM
PENGATUR BUKA/TUTUP ATAP DAN PEMANAS RUANGAN
TUGAS AKHIR
ALEX P PASARIBU
062408004
PROGRAM STUDI D3 FISIKA INSTRUMENTASI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
APLIKASI MIKROKONTROLER AT89S51 UNTUK SISTEM
PENGATUR BUKA/TUTUP ATAP DAN PEMANAS RUANGAN
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Ahli Madya
ALEX P PASARIBU
062408004
PROGRAM STUDI D3 FISIKA INSTRUMENTASI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : APLIKASI MIKROKONTROLER AT89S51 UNTUK
SISTEM PENGATUR BUKA / TUTUP ATAP DAN PEMANAS RUANGAN
Kategori : TUGAS AKHIR
Nama : ALEX P PASARIBU
NIM : 062408004
Program Studi : D-3 FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
Medan, Juni 2009 Diketahui oleh :
Ketua Program Studi
D3 Fisika Instrumentasi Pembimbing
PERNYATAAN
APLIKASI MIKROKONTROLER AT89S51 UNTUK BUKA/TUTUP ATAP DAN PEMANAS RUANGAN
TUGAS AKHIR
Saya mengakui bahwa laporan tugas akhir ini adalah hasil kerja saya sendiri,kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juni 2008
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus Yang Maha Pengasih dan Maha Penyayang atas segala anugerah dan karunianya sehingga penulis dapat menyelesaikan laporan tugas akhir ini.
Penulisan laporan proyek ini tidak terlepas dari bantuan dari berbagai pihak baik berupa dorongan semangat, materi dan sumbangan pikiran. Oleh karena itu pada kesempatan ini penulis mengucapkan terimakasih kepada semua pihak yang telah memberikan bantuan terutama kepada:
1. Bapak Prof. Dr. Eddy Marlinto, M.Sc, selaku Dekan Fakultas Matematika Dan Ilmu Pengetahuan Alam.
2. Bapak Dr. Marhaposan Situmorang, selaku Ketua Departemen Fisika dan selaku dosen pembimbing yang telah banyak membimbing penulis sehingga laporan ini dapat diselesaikan dengan baik.
3. Bapak Drs. Syahrul Humaidi, M.Sc, selaku Ketua Program Study Fisika Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam.
4. Dra. Justinon, MSi selaku sekretaris Departemen Fisika.
5. Staff dan Pegawai di Fakultas Matematika dan Ilmu Pengetahuan Alam khususnya program study Fisika Instrumentasi.
6. Teristimewa buat kedua orang tuaku yang kucintai Ayahanda E. Pasaribu dan Ibunda L. Sihombing, yang begitu banyak memberikan dukungan berupa materil, moril maupun spirituil pada penulis sehingga penulis dapat menyelesaikan laporan tugas akhir ini hingga selesai
7. Abang penulis Poltak T M Pasaribu, ST , kakakku Dame N Siahaan, SSi, Sondang M V Pasaribu, SE, Betty G M Pasaribu, SE, Indah M Pasaribu, Amd, dan adik siampudan penulis Nova L.K Pasaribu yang juga banyak memberikan semangat kepada penulis dan si kecil Maruli Tua Eka Sakti. I Love You All.
8. Kepada teman seperjuangan dalam proyek Ozie Tarigan, teman teman
DEBAGOR Comunity (Ihut, Manto, Junaidi, Herman), Ucok sinaga,Willy, Essen,Sony Cheng,Ornal,Adi, teman dipelatihan PLC BLPT Daniel,Darius Carles ,Adynata,Monika ,dan mahasiswa/i Fisika Intrumentasi khususnya stambuk 2006 yang telah banyak meluangkan waktunya untuk membantu penulis dalam menyelesaikan laporan ini.
9. Teman – teman di Perguruan Siaw Liem Sie Kungfu Naga Sakti Balige dan Ikatan Pemuda Karya DPC Toba Samosir serta rekan – rekan Alumni SMAN 2 Balige ‘04 yang turut membantu penulis.
Penulis menyadari dalam pembuatan laporan Tugas Akhir ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran yang bersifat membangun dalam penyempurnaan laporan Tugas Akhir ini.
ABSTRAK
`Perkembangan elektronika sangat menglobal termasuk di Indonesia baik robotika, mekatronika, dan instrumentasi cerdas. Beberapa teknologi sudah dapat dibuat di indonesia, tetapi masih banyak teknologi yang harus didatangkan dari luar negeri sehingga harganya menjadi sangat mahal. salah satu teknologi yang sangat mahal di Indonesia adalah teknologi instrumentasi.
Dalam ruangan yang tertutup suhu adalah faktor yang sangat berpengaruh terhadap lingkungannya. Pengontrolan terhadap suhu ruangan yang bekerja secara otomatis dapat menjaga suhu dalam kondisi optimum. Dari sekian banyak teknologi Instrumentasi, teknologi Instrumentasi yang dapat mengenali suhu dan cahaya atau sering disebut dengan sensor suhu dan sensor cahaya yang sangat banyak dibutuhkan dibidang industri.
Sensor yang dipasang sebagai umpan balik (feedback) dalam system akan mengindra nilai suhu ruangan secara terus - menerus (real time). Hasil tersebut sebelum dikirimkan kepada mikrokontroler untuk diolah telah dikonversikan dahulu oleh ADC. Sensor ini mempunyai banyak sekali kegunaannya seperti untuk industri pengecatan, perumahan modern, incubator, bidang pertanian, dan lainnya.
Dalam hal ini Instrumen Pengatur Buka/Tutup Atap dan Pemanas Ruangan dirangkai dengan Mikrookontroler AT89S51 sebuah Sensor suhu LM 35 dan sebuah sensor vahaya LDR , dilengkapi dengan display Seven Segment. Mikrokontroler AT89S51 sebagai otak dari system, yang berfungsi mengolah data yang masuk dari sensor, kemudian menampilkannya pada display Display Seven Segment..
DAFTAR ISI
Halaman
Lembar Persetujuan ii
Lembar Pernyataan iii
2.3.1 Arsitektur Mikrokontroler AT89S51 14
2.3.2 Kontruksi AT89S51 16
2.3.3 Pin-Pin pada Mikrokontroler AT89S51 19
2.4 Perangkat Lunak 22
BAB 3 RANGKAIAN PADA SISTEM PENGATUR BUKA / TUTUP
3.2.2 Fungsi Rangkaian 36
3.7 Rangkaian Relay Pengendali Pemanas (Blower) 43
3.7.1 Prinsip Kerja Rangkaian 43
3.7.2 Fungsi Rangkaian 45
3.8 Rangkaian Driver Motor Stepper 45
3.8.1 Prinsip Kerja Rangkaian 45
3.8.2 Fungsi Rangkaian 47
3.9 Rangkaian Display Seven Segment 47
3.9.1 Prinsip Kerja Rangkaian 47
3.9.2 Fungsi Rangkaian 49
BAB 4 RANGKAIAN SISTEM KESELURUHAN DAN PEMROGRAMAN 50
4.1 Rangkaian Sistem Pengatur Buka / Tutup Atap
dan Pemanas Ruangan 50
4.2 Pengujian rangkaian mikrokontroler
Atap dan Pemanas Ruangan 51
4.3 Pengujian Rangkaian ADC 52
4.4 Mekanisme Kerja dan Diagram Blok Sistem Pengatur Buka/Tutup 53 4.5 Diagram Alir (Flowchart) dan program pada pemanas ruangan
56 4.6 Diagram Alir (Flowchart) dan program pada pengatur buka /
tutup atap
59
4.7 Pengujian peralatan secara keseluruhan 61
BAB 5 KESIMPULAN DAN SARAN 74
5.1 Kesimpulan 77
5.2 Saran 78
DAFTAR PUSTAKA
DAFTAR TABEL
Halaman
Tabel 2.1 Konfigurasi Port 3 Mikrokontroller AT89S51 20
Tabel 4.2 Pengolahan data suhu yang terukur oleh rangkaian ADC serta
BAB 1
PENDAHULUAN
1.1. Latar Belakang Masalah
Dalam kurun waktu singkat perkembangan teknologi melaju dengan sangat pesat.
Perkembangan teknologi ini merupakan hasil kerja keras dari rasa ingin tahu manusia
terhadap suatu hal yang pada akhirnya diharapkan akan mempermudah manusia untuk
dapat menyelesaikan beberapa perkembangan dalam waktu bersamaan dan relatif
cepat.
Perkembangan teknologi di negara maju seperti Amerika, Inggris, Jepang,
Jerman dan beberapa negara lain membuat kita terpacu untuk membuat /
menghasilkan hal sejenis, setidaknya dapat sedikit mengikuti perkembangan.
Dewasa ini manusia semakin menggemari perumahan / ruangan – ruangan
modern. Setiap orang pasti menginginkan fasilitas yang sangat memadai. Misalnya
rumah rumah modern, apabila seseorang menjadikan rumah sebagai tempat
berlindung maka ia akan mendesain rumahnya senyaman mungkin dari gangguan
Kita ingin mendapatkan kepuasan tersendiri jika rumah yang kita tinggalin
dengan fasilitas yang lengkap dan nyaman.dan dihalangi oleh cuaca yang sering
berganti secara tiba-tiba. Misalnya dengan membuat atap yang secara otomatis dapat
terbuka dan tertutup sendiri bila berada dalam kondisi tertentu, sehingga kita tidak
direpotkan oleh pergantian cuaca. Apabila kita membutuhkan suhu ruangan yang
hangat atau panas ruangan yang kita butuhkan atau pengganti pemanas yang biasa nya
memakai kayu bakar atau arang dapat dibuat dengan pemanas yang secara otomatis
dapat kita tentukan besar suhunya.
Oleh sebab itu diperlukan suatu perangkat pengaturan atap dan pemanas
ruangan yang otomatis. Perangkat pengaturan atap dan pemanas ruangan ini
dilengkapi sensor pengukuran temperatur dan tampilan yang berfungsi untuk
mengukur dan menampilkan besar nilai temperatur yang diukur. Selain itu dilengkapi
pemanas (heater) yang berfungsi sebagai pengendali temperatur yaitu sebagai
pemanas sesuai dengan temperatur yang kita butuhkan. Perangkat pengaturan atap dan
pemanas ruangan ini juga dilengkapi sensor cahaya yang akan mendeteksi intensitas
cahaya matahari yang akan mengendalikan terbuka / tertutupnya atap secara otomatis.
Sistem ini juga bukan hanya berlaku pada ruangan rumah tetapi dapat juga
diaplikasikan untuk keperluan – keperluan lainnya. Misalnya ruangan pengecatan mobil. Pengeringan (drying) adalah pemisahan sejumlah kecil air atau zat cair lain dari bahan padat, sehingga mengurangi kandungan sisa zat cair di dalam zat padat itu
sampai suatu nilai rendah yang dapat diterima. Proses pengeringan terdapat dua
Pengeringan alami dikategorikan dalamdua kelompok yaitu:
1. Pengeringan Langsung ( MetodeRadiasi )
Pengeringan langsung menggunakan energi radiasi thermal sinar matahari untuk
mengabsorbsi ( menyerap ) air dalam menjadi uap air.
2. Pengeringan Tidak Langsung ( Metode Konveksi )
Bila udara di sekitar pengecatan dalam keadaan panas dan kering, maka udara panas
dan kering tersebut akan mengabsorbsi air dalam cat. Daya absorbsi udara ini juga
dipengaruhi oleh gerak geseran udara (angin). Dimana teknik pengeringan ini pada
pengecatan mobil bagus. Keringnya cat dipengaruhi factor suhu agar didapat hasil
yang memuaskan.
Contoh lainnya seperti. ruangan pengeringan hasil pertanian dan alat pengeringan
kertas.
Mikrokontroler adalah sistem komputer yang ringkas, dapat menggantikan
fungsi komputer dalam pengendalian kerja dan disain yang jauh lebih ringkas
daripada computer. Dengan ukurannya sangat kecil, mikrokontroler dapat digunakan
pada peralatan yang bersifat bergerak (mobile), seperti pada kendaraan, peralatan
jinjing dan instrumentasi cerdas, mikrokontroler digunakan sebagai otak dari suatu
embedded system, sebuah system computer terpadu. Mikrokontroler memiliki perbandingan ROM dan RAM-nya yang besar artinya program control disimpan
dalam ROM (bias Masked ROM atau Flash PEROM) yang ukurannya relative besar,
sedangkan RAM digunakan sebagai tempat penyimpanan sementara, hal ini
Mikrokontroler AT89S51 adalah chip mikrokontroler produksi Atmel Inc,
merupakan keluarga MCS-51 rancangan Intel. AT89S51 mempunyai fitur dasar yang
cukup lengkap untuk suatu pemrosesan input-output. Bahasa pemrograman yang
digunakan AT89S51 hampir tidak berneda jauh dengan intruksi set pada
mikroprosesor Intel yang sudah dipelajari pada perkuliahan.
1.2 Batasan Masalah
Untuk memberi batasan pada pembahasan dan penulisan tugas akhir ini, maka tugas
akhir ini dibatasi dengan batasan – batasan sebagai berikut :
1. Mikrokontroler yang digunakan adalah jenis AT89S51.
2. Menggunakan sensor temperature LM 35 dan LDR sebagai sensor cahaya.
3. Untuk menggerakkan atap ruangan digunakan motor stepper.
4. Pengukuran temperatur dilakukan oleh sensor temperature LM 35 dan
peningkatan temperatur dilakukan dengan cara menghidupkan blower
(pemanas) , apabila temperature telah mencapai harga yang diinginkan maka
blower (pemanas) akan dimatikan dengan otomatis.
5. Sensor cahaya LDR hanya melihat kondisi gelap dan kondisi terang sebagai
kondisi terbuka / tertutupnya atap.
1.3 Tujuan Penulisan
Adapun tujuan dari penulisan tugas akhir ini adalah :
1. Untuk Menerapkan ilmu yang dipelajari di bangku kuliah secara nyata dan
2. Untuk memenuhi salah satu syarat dalam menyelesaikan studi pada program
studi D3 Fisika Instrumentasi di Fakultas MIPA Universitas Sumatera Utara.
3. Studi awal dalam pembuatan instrumentasi cerdas pengatur buka/tutup atap
dan pemanas ruangan otomatis.
4. Memanfaatkan mikrokontroler AT89S51 sebagai tempat pemrosesan data
(otak) dari sebuah system.
1.4 Metode Pengumpulan Data
Adapun metode pengumpulan data yang dilakukan oleh penulis adalah:
1. Studi kepustakaan.
Pada metode ini, penulis mengumpulkan data dan teori yang dibutuhkan dalam
penulisan tugas akhir melalui buku – buku dan referensi lainnya yang
berkaitan dengan tugas akhir ini.
2. Lembar data (Datasheet) komponen yang digunakan pada peralatan.
Lembar data (datasheet) merupakan data – data yang dikeluarkan oleh
produsen komponen elektronika mengenai fungsi, karakteristik dan data – data
penting lainnya tentangsuatu komponen hasil produksi dari produsen
komponen elektronika yang bersangkutan.
3. Pengujian Alat.
Data yang diperoleh melalui metode ini didapat setelah alat yang dibuat diuji
dan diambil kesimpulan setelah dilakukan pengujian tersebut.
Pada metode ini, penulis melakukan konsultasi dengan besrdiskusi dan
bertanya secara langsung pada Dosen pembimbing penulis mengenai segala
permasalahan dalam penulisan tugas akhir ini.
I.5 Sistematika Penulisan
Adapun sistematika penulisan yang digunakan dalam penyusunan Tugas Akhir ini
adalah sebagai berikut :
BAB 1. PENDAHULUAN
Meliputi latar belakang, batasan masalah, tujuan penulisan tugas akhir,
metode pengumpulan data dan sistematika penulisan.
BAB 2. LANDASAN TEORI
Landasan teori dalam bab ini akan dijelaskan tentang teori pendukung
yang digunakan untuk pembahasan dan cara kerja dari rangkaian. Teori
pendukung itu antara lain tentang mikrokontroler AT89S51 meliputi
arsitektur dan kontruksi, bahasa program yang digunakan, serta
karekteristik dari komponen-komponen pendukung.
BAB 3. RANGKAIAN PADA OTOMATISASI SISTEM PENGATURAN ATAP DAN PEMANAS RUANGAN
Pada bab ini akan dipaparkan mengenai rangkaian – rangkaian yang
digunakan pada otomatisasi sistema pengaturan atap dan pemanas
BAB 4. PENGUJIAN RANGKAIAN DAN PEMROGRAMAN
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja
alat, penjelasan mengenai program-program yang digunakan untuk
mengaktifkan rangkaian, dan diagram alir dari program yang akan
diisikan ke mikrokontroler AT89S51.
BAB 5. KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan yang
diperoleh mengenai system pengaturan atap dan pemanas ruangan
otomatis serta saran yang diberikan agar rangkaian ini dapat dibuat
lebih efisien dan dikembangkan perakitannya pada suatu metode lain
BAB 2
LANDASAN TEORI
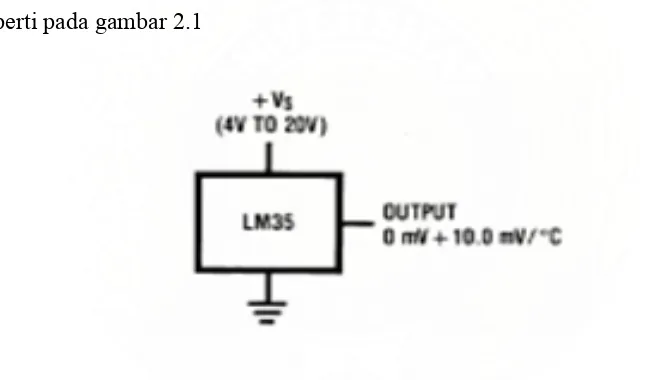
2.1 Sensor Suhu IC LM35
Untuk mendeteksi suhu digunakan sebuah sensor suhu LM 35 yang dapat
dikalibrasikan langsung , LM 35 ini difungsikan sebagai basic temperature sensor
seperti pada gambar 2.1
Gambar 2.1 LM 35 Basic Temperature Sensor
IC LM 35 sebagai sensor suhu yang teliti dan terkemas dalam bentuk
Integrated Circuit (IC), dimana output tegangan keluaran sangat linear berpadanan
dengan perubahan suhu. Sensor ini berfungsi sebagai pengubah dari besaran fisis suhu
ke besaran tegangan yang memiliki koefisien sebesar 10 mV /°C yang berarti bahwa
IC LM 35 ini tidak memerlukan pengkalibrasian atau penyetelan dari luar
karena ketelitiannya sampai lebih kurang seperempat derajat celcius pada temperatur
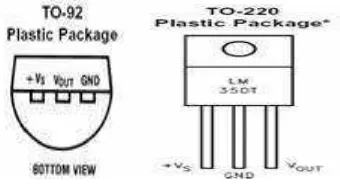
ruang. Jangka sensor mulai dari – 55°C sampai dengan 150°C, IC LM35
penggunaannya sangat mudah, difungsikan sebagai kontrol dari indikator tampilan
catu daya terbelah. IC LM 35 dapat dialiri arus 60 m A dari supplay sehingga panas
yang ditimbulkan sendiri sangat rendah kurang dari 0 ° C di dalam suhu ruangan.
Gambar 2.2 Rangkaian Pengukur Suhu
LM 35 ialah sensor temperatur paling banyak digunakan untuk praktek, karena selain
harganya cukup murah, linearitasnya juga lumayan bagus. LM35 tidak membutuhkan
kalibrasi eksternal yang menyediakan akurasi ± ¼ °C pada temperatur ruangan dan
± ¾ °C pada kisaran -55 °C to +150 °C. LM35 dimaksudkan untuk beroperasi pada
-55 °C hingga +150 °C, sedangkan LM35C pada -40 °C hingga +110 °C, dan
LM35D pada kisran 0-100°C. LM35D juga tersedia pada paket 8 kaki dan paket
TO-220. Sensor LM35 umunya akan naik sebesar 10mV setiap kenaikan 1°C (300mV
pada 30 °C).
Sensor suhu LM35 berfungsi untuk mengubah besaran fisis yang berupa suhu menjadi
besaran elektrik tegangan. Sensor ini memiliki parameter bahwa setiap kenaikan 1°C
tegangan keluarannya naik sebesar 10mV dengan batas maksimal keluaran sensor
adalah 1,5V pada suhu 150°C.
Pada perancangan kita tentukan keluaran ADC mencapai full scale pada saat
suhu 100°C, sehingga tegangan keluaran tranduser (10mV/°C x 100°C) = 1V.
Pengukuran secara langsung saat suhu ruang, keluaran LM35 adalah 0,3V
(300mV). Tengan ini diolah dengan mengunakan rangkaian penglondisi sinya agar
sesuai dangan tahapan masukan ADC. LM35 memiliki kelibihan – kelebihan sebagai
berikut:
1. Di kalibrasi langsung dalam celsius
2. Memiliki faktor skala linear + 10.0 mV/°C
3. Memiliki ketetapan 0,5°C pada suhu 25°C
4. Jangkauan maksimal suhu antara -55°C sampai 150°C
5. Cocok untuk applikasi jarak jauh
6. Harganya cukup murah
7. Bekerja pada tegangan catu daya 4 sampai 30Volt
8. Memiliki arus drain kurang dari 60 uAmp
9. Pemanasan sendiri yang lambat ( low self-heating)
10.0,08ûC diudara diam
11.Ketidak linearannya hanya sekitar ±¼°C
12.Memiliki Impedansi keluaran yang kecil yaitu 0,1 watt untuk beban 1
Sensor suhu tipe LM35 merupakan IC sensor temperatur yang akurat yang
tegangan keluarannya linear dalam satuan celcius. Jadi LM35 memilik kelebihan
dibandingkan sensor temperatur linear dalam satuan kelvin, karena tidak memerlukan
pembagian dengan konstanta tegangan yang besar dan keluarannya untuk
mendapatkan nilai dalam satuan celcius yang tepat. LM35 memiliki impedansi
keluaran yang rendah, keluaran yang linear, dan sifat ketepatan dalam pengujian
membuat proses interface untuk membaca atau mengontrol sirkuit lebuh mudah. Pin
V+ dari LM35 dihubungkan kecatu daya, pin GND dihubungkan ke Ground dan pin
Vout- yang menghasilkan tegangan analog hasil pengindera suhu dihubungkan ke vin
(+) dan ADC 0804.
2.2 LDR sebagai sensor
Fotosel atau sel foto termasuk sel fotokonduktif, LDR, dan fotoresistor. Ini adalah
resistor – resistor variable dengan jangkah nilai resistansi yang sangat lebar, yang
tergantung pada intensitas cahaya yang ada. Resistansi didalam fotosel berubah secara
terbalik dengan kekuatan cahaya yang mengenainya. Dengan kata lain, resistansi
fotosel sangat tinggi dalam kegelapan dan rendah diruang yang terang . Bahan
fotokonduktif atau LDR yang biasa digunakan adalah cadmium sulfide (Cds) atau
cadmium selenida (Cdse). Jenis bahan, ketebalan, dan lebar endapannya menentukan
nilai resistansi dan jangkauan daya peranti ini.
Jenis LDR yang digunakan adalah LDR cadmium Sulphide Photoconductive Cell VCA 54 yang memiliki karakteristik nilai hambatannya akan turun jika terdapat cahaya yang mengenai permukaannya. Dari pengujian resistansi LDR nilai
dalam data sheet resistansi LDR bisa mencapai lebih dari 1 MOhm . LDR yang memiliki hambatan tinggi saat cahaya kurang mengenainya (gelap), dalam kondisi
seperti ini LDR dapat mencapai 1 M, akan tetapi saat LDR terkena cahaya hambatan
LDR akan turun secara drastis hingga mencapai 1,5 Ohm?. Berikut ini adalah gambar
dari rangkaian sensor cahaya LDR.
Gambar 2.4a Rangkaian LDR Gambar 2.4b Bentuk Fisik LDR
Pada perancangan sensor cahaya akan diukur LDR sebagai perhitungan, dengan
diketahui harga Vcc = 5 Volt dan VR = 10 K? maka besar tegangan keluaran dari
rangkaian ini sebesar
VOutput = x VCC
Pada LDR terkena cahaya maksimum dengan nilai resistansi sebesar 1,52 Ohm
VOutput = x 5 = 0,000152 = 2,49 m Volt
Pada LDR terkena cahaya minimum dengan nilai resistansi sebesar 1 M?
2.3 Mikrokontroller AT89S51
Mikrokontroler, sebagai suatu terobosan teknologi mikrokontroler dan
mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi baru, yaitu teknologi semi konduktor dengan kandungan transistor
yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi
secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah
(dibandingkan mikroprosesor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk
memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat
bantu dan mainan yang lebih canggih serta dalam bidang pendidikan.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam
program aplikasi (misalnya pengolah kata, pengolah angka, dan lain sebagainya),
mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan
lainnya terletak pada perbandingan RAM dan ROM-nya. Pada sistem komputer
perbandingan RAM dan ROM-nya besar, artinya program-program pengguna
disimpan dalam ruang RAM yang relatif besar, sedangkan rutin-rutin antar muka
perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada
mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program
kontrol disimpan dalam ROM yang ukurannya relatif lebih besar, sedangkan RAM
digunakan sebagai tempat penyimpanan sederhana sementara, termasuk
register-register yang digunakan pada mikrokontroler yang bersangkutan.
Mikrokontroler AT89S51 merupakan salah satu keluarga dari MCS-51
keluaran Atmel. Jenis mikrokontroler ini pada prinsipnya dapat digunakan untuk
Pada prinsipnya program pada mikrokontroler dijalankan bertahap, jadi pada
program itu sendiri terdapat beberapa set instruksi dan tiap instruksi itu dijalankan
secara bertahap atau berurutan.
Beberapa fasilitas yang dimiliki oleh mikrokontroler AT89S51 adalah sebagai
berikut :
1. Sebuah Central Processing Unit 8 bit 2. Osilator : internal dan rangkaian pewaktu 3. RAM internal 128 byte
4. Flash memori 4 Kbyte
5. Lima buah jalur interupsi (dua buah interupsi eksternal dan tiga buah interupsi
internal)
6. Empat buah programable port I/O yang masing-masing terdiri dari delapan buah jalur I/O
7. Sebuah port serial dengan kontrol serial full duplex UART
8. Kemampuan untuk melaksanakan operasi aritmatika dan operasi logika
9. Kecepatan dalam melaksanakan instruksi per siklus 1 mikrodetik pada
frekuensi 12 MHz.
2.3.1 Arsitektur Mikrokontroler AT89S51
Setiap mikrokontroler memiliki arsitekturr yang berbeda. Tetapi meskipun demikian
memilikikeseragaman dalam pokok – pokok kerjanya. Pada dasarnya arsitektur
mikrokontroler dapat dilihat pada pengalamatan kode dan pengalamatan datanya,
tipe yang memisahkan alamat kode dengan alamat datanya. Keluarga MCS-51
termasuk dalam kategori yang memisahkan alamat kode maupun datanya.
Ada beberapa mode pengalamatan pada mikrokontroler :
1. Pengalamatan Langsung
Penglamatan langsung dilakukan dengan memberikan nilai kesuatu register
secara langsung dengan menggunakan tanda ”#”.
Contoh :
Mov A,#20h : isi akkumulator dengan bilangan 20 h Mov DPTR,#25h : isi register DPTR dengan bilangan 25 h Mov R1,#10h : isi register R1 dengan bilangan 10 h
2. Pengalamatan tak langsung
Pengalamatan tak langsung dilakukan untuk menunjuk ke sebuah register yang
berisi alamat memori yang digunakan dalam operasi dengan menggunakan
tanda ”@”. AT89S51 mempunyai sebuah register 16 bit (DPTR) yang dapat
digunakan untuk melakukan pengalamatan tidak langsung.
Contoh :
DEC @R1 : kurangi isi RAM yang alamatnya ditunjukkan oleh register R1
3. Pengalamatan kode
Pengalamatan kode terjadi saat operand berfungsi sebagai alamat dari intruksi
4. Pengalamatan Bit
Pengalamatan bit merupakan penunjukan alamat lokasi bit, baik yang berada
didalam RAM internal atau perangkat keras. Simbol (.) digunakan dalam
operasi ini.
Contoh :
SETB P1.5 : set bit port 1.5 aktif SETB TR1 : set bit TR1 (timer 1 aktif)
Tidak seperti sistem komputer, yang mampu manangani berbagai macam
program aplikasi (misalnya pengolah data, pengolah angka, dan lain sebagainya),
mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan
lainnya terletak pada perbandingan RAM-nya dan ROM. Pada sistem komputer
perbandingan RAM dan ROM-nya besar, artinya program – program pengguna
disimpan dalam ruang RAM yang relatif besar, sedangkan rutin – rutin antar muka
prangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada
mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program
kontrol disimpan dalam ROM (bisa masked Rom atau Flash PEROM) yang
ukurannya relatif besar, sedangkan RAM digunakan sebagai tempat penyimpanan
sementara, termasuk register – register yang digunakan pada mikrokontroler yang
bersangkutan.
2.3.2 Kontruksi AT89S51
Mikrokontroler AT89S51 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1
kristal serta catu daya 5 volt. Kapasitor 10 mikro-farad dan resistor 10 kilo Ohm
AT89C4051 otomatis direset begitu rangkaian menerima catu daya. Kristal dengan
frekuensi maksimum 24MHz dan kapasitor 30 mikro-farad dipakai untuk melengkapi
rangkaian osilator pembentuk clock yang menentukan kecepatan kerja mikrokontroler.
Memori merupakan bagian yang sangat penting pada mikrokontroler.
Mikrokontroler memiliki dua macam memori yang sifatnya berbeda.
Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dengan keperluannya, dalam susunan MCS-51 memori
penyimpanan program ini dinamakan sebagai memori program.
Random Access Memory (RAM) isinya akan sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat program bekerja. RAM yang dipakai
untuk menyimpan data ini disebut sebagai memori data.
Ada berbagai jenis ROM. Untuk mikrokontroler dengan program yang sudah
baku dan diproduksi secara massal, program diisikan kedalam ROM pada saat IC
mikrokontroler dicetak dipabrik IC. Untuk keperluan tertentu mikrokontroler
menggunakan ROM yang dapat diisi ulang atau Programble-Eraseable ROM yang
disingkat menjadi PROM (PEROM). Dulu banyak UV-EPROM (Ultra Violet
Eraseable Programble ROM) yang kemudian dinilai mahal dan ditinggalkan setelah ada flash PEROM yang harganya jauh lebih murah.
Jenis memori yang dipakai untuk memori program AT89S51 adalah flash
PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat
Memori data yang disediakan dalam chip AT89S51 sebesar 128 kilo byte meskipun
hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu sudah cukup.
AT89S51 dilengkapi UART (Universal Asyncronous Receiver/Transmiter) yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk komunikasi data
seri (RXD dan TXD) diletakkan berhimpitan dengan P1.0 dan P1.1. pada kaki nomor
2 dan 3, sehingga kalau sarana input/output bekerja menurut fungsi waktu. Clock
penggerak untaian pencacah ini bisa berasal dari osilator kristal atau clock yang diumpan dari luar lewat T0 dan T1/T0 dan T1 berhimpitan dengan P3.4 dan P3.5,
sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur input/output paralel kalau T0 dan T1 dipakai.
AT89S51 mempunyai enam sumber pembangkit interupsi, dua diantaranya
adalah sinyal interupsi yang diumpankan ke kaki INT0 dan INT1. Kedua kaki ini
berhimpitan dangan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur
input/output paralel kalau INT0 dan INT1 dipakai untuk menerima sinyal interupsi.
Port1 dan 2, UART, Timer 0, Timer 1 dan sarana lainnya merupakan yang
secara fisik merupakan RAM khusus, yang ditempatkan di Special Function Register
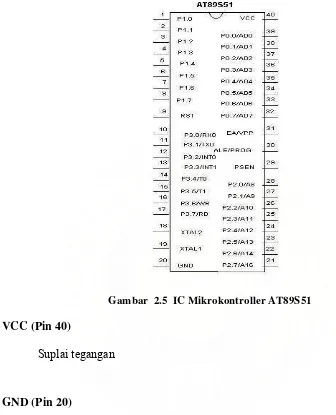
2.3.3 Pin-Pin pada Mikrokontroler AT89S51
Deskripsi pin-pin pada Mikrokontroler AT89S51 :
Gambar 2.5 IC Mikrokontroller AT89S51
VCC (Pin 40)
Suplai tegangan
GND (Pin 20)
Ground
Port 0 (Pin 39-Pin 32)
Port 0 dapat berfungsi sebagai I/O biasa, low order multiplex address/data
ataupun penerima kode byte pada saat flash progamming Pada fungsi sebagai I/O biasa port ini dapat memberikan output sink ke delapan buah TTL input atau dapat diubah sebagai input dengan memberikan logika 1 pada port tersebut.
internal pull up.
Pada saat flash progamming diperlukan eksternal pull up, terutama pada saat verifikasi program.
Port 2 (Pin 21 – pin 28)
Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengakses memori secara 16 bit. Pada saat mengakses memori 8 bit, port ini akan
mengeluarkan isi dari P2 special function register. Port ini mempunyai internal pull up dan berfungsi sebagai input dengan memberikan logika 1. Sebagai output, port ini dapat memberikan output sink keempat buah input TTL.
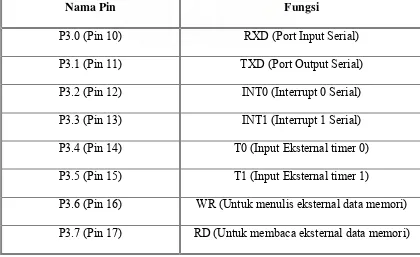
Port 3 (Pin 10 – pin 17)
Port 3 merupakan 8 bit port I/O dua arah dengan internal pullup. Port 3 juga mempunyai fungsi pin masing-masing, yaitu sebagai berikut :
Tabel 2.1 Konfigurasi Port 3 Mikrokontroler AT89S51
Nama Pin Fungsi
P3.0 (Pin 10) RXD (Port Input Serial)
P3.1 (Pin 11) TXD (Port Output Serial)
P3.2 (Pin 12) INT0 (Interrupt 0 Serial)
P3.3 (Pin 13) INT1 (Interrupt 1 Serial)
P3.4 (Pin 14) T0 (Input Eksternal timer 0)
P3.5 (Pin 15) T1 (Input Eksternal timer 1)
P3.6 (Pin 16) WR (Untuk menulis eksternal data memori)
RST (pin 9)
Reset akan aktif dengan memberikan input high selama 2 cycle.
ALE/PROG (pin 30)
Address Latch Enable adalah pulsa output untuk me-latch byte bawah dari alamat selama mengakses memori eksternal. Selain itu, sebagai pulsa input program (PROG) selama memprogram Flash.
PSEN (pin 29)
Progam store enable digunakan untuk mengakses memori progam eksternal.
EA (pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan progam yang ada pada memori eksternal setelah sistem direset. Jika kondisi high, pin ini akan berfungsi untuk menjalankan progam yang ada pada memori internal. Pada saat flash progamming, pin ini akan mendapat tegangan 12 Volt.
XTAL1 (pin 19)
Input untuk clock internal.
2.4 Perangkat Lunak
2.4.1 Bahasa Assembly MCS-51
Bahasa yang digunakan untuk memprogram IC mikrokontroler AT89S51 adalah
bahasa assembly untuk MCS-51. angka 51 merupakan jumlah instruksi pada bahasa
ini hanya ada 51 instruksi. Dari 51 instruksi, yang sering digunakan orang hanya 10
instruksi. Instruksi –instruksi tersebut antara lain :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register
tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Contoh pengisian nilai secara langsung
MOV R0,#20h
Perintah di atas berarti : isikan nilai 20 Heksadesimal ke register 0 (R0).
Tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah nilai.
Contoh pengisian nilai secara tidak langsung
MOV 20h,#80h ...
... MOV R0,20h
Perintah di atas berarti : isikan nilai yang terdapat pada alamat 20
Heksadesimal ke register 0 (R0).
Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk
mengurangi nilai register tertentu dengan 1 dan lompat jika hasil
pengurangannya belum nol. Contoh ,
MOV R0,#80h Loop: ...
...
DJNZ R0,Loop ...
R0 -1, jika belum 0 lompat ke loop, jika R0 = 0 maka program akan
meneruskan ke perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu. Contoh :
...
ACALL TUNDA ...
TUNDA:
...
4. Instruksi RET
Instruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin pemanggil setelah instruksi ACALL dilaksanakan. Contoh,
ACALL TUNDA ...
TUNDA:
5. Instruksi JMP (Jump)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh,
Loop:
... ...
JMP Loop
6. Instruksi JB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang
dimaksud berlogika high (1). Contoh,
Loop:
JB P1.0,Loop ...
7. Instruksi JNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang
dimaksud berlogika Low (0). Contoh,
Loop:
JNB P1.0,Loop ...
8. Instruksi CJNZ (Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register
dengan suatu nilai tertentu. Contoh,
Loop:
...
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin
Loop. Jika nilai R0 sama dengan 20h,maka program akan melanjutkan
instruksi selanjutnya..
9. Instruksi DEC (Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang
dimaksud dengan 1. Contoh,
MOV R0,#20h R0 = 20h
...
DEC R0 R0 = R0 – 1
...
10.Instruksi INC (Increament)
Instruksi ini merupakan perintah untuk menambahkan nilai register yang
dimaksud dengan 1. Contoh,
MOV R0,#20h R0 = 20h
...
INC R0 R0 = R0 + 1
...
11.Dan lain sebagainya
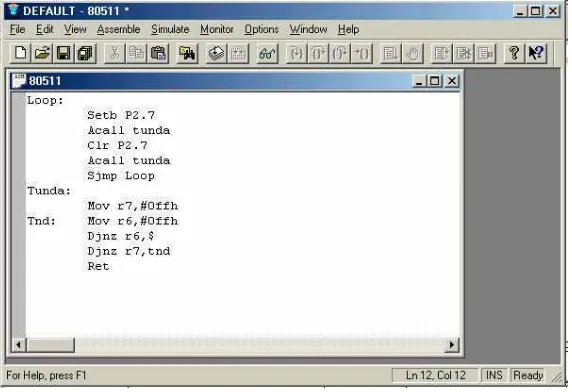
2.4.2 Software 8051 Editor, Assembler, Simulator (IDE)
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan pada sebuah
editor, yaitu 8051 Editor, Assembler, Simulator (IDE). Tampilannya seperti di bawah
Gambar 2.6 8051 Editor, Assembler, Simulator (IDE)
Setelah program selesai ditulis, kemudian di-save dan kemudian di-Assemble
(di-compile). Pada saat di-assemble akan tampil pesan peringatan dan kesalahan. Jika
masih ada kesalahan atau peringatan, itu berarti ada kesalahan dalam penulisan
perintah atau ada nama subrutin yang sama, sehingga harus diperbaiki terlebih dahulu
sampai tidak ada pesan kesalahan lagi.
Software 8051IDE ini berfungsi untuk merubah program yang kita tuliskan ke
dalam bilangan heksadesimal, proses perubahan ini terjadi pada saat peng-compile-an.
Bilangan heksadesimal inilah yang akan dikirimkan ke mikrokontroller.
2.4.3 Software Downloader
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroller digunakan
software ISP- Flash Programmer 3.0a yang dapat didownload dari internet.
Gambar 2.7 ISP- Flash Programmer 3.a
Cara menggunakannya adalah dengan meng-klik Open File untuk mengambil
file heksadesimal dari hasil kompilasi 8051IDE, kemudian klik Write untuk
mengisikan hasil kompilasi tersebut ke mikrokontroller.
2.5 Relay
Relay adalah suatu rangkaian switch magnetik yang bekerja bila mendapat catu dan
suatu rangkaian trigger. Relay memiliki tegangan dan arus nominal yang harus
dipenuhi output rangkaian pendriver atau pengemudinya. Arus yang digunakan pada
rangkaian adalah arus DC.
Konstruksi dalam suatu relay terdiri dari lilitan kawat (coil) yang dililitkan
pada inti besi lunak. Jika lilitan kawat mendapatkan aliran arus, inti besi lunak kontak
menghasilkan medan magnet dan menarik switch kontak. Switch kontak mengalami
asalnya. Keadaan ini akan bertahan selama arus mengalir pada kumparan relay. Dan
relay akan kembali keposisi semula yaitu normaly ON atau Normaly OFF, bila tidak
ada lagi arus yang mengalir padanya, posisi normal relay tergantung pada jenis relay
yang digunakan. Dan pemakaian jenis relay tergantung pada kadaan yang diinginkan
dalam suatu rangkaian.
Menurut kerjanya relay dapat dibedakan menjadi :
a. Normaly Open (NO), saklar akan tertutup bila dialiri arus
b. Normaly Close (OFF), saklar akan terbuka bila dialiri arus
c. Change Over (CO), relay ini mempunyai saklar tunggal yang nomalnya tertutup
yang lama, bila kumparan 1 dialiri arus maka saklar akan terhubung ke terminal A,
sebaliknya bula kumparan 2 dialiri arus maka saklar akan terhubung ke terminal
B.
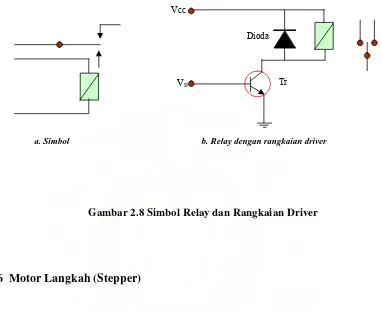
Analogi rangkaian relay yang digunakan pada tugas akhir ini adalah saat basis
transistor ini dialiri arus, maka transistor dalam keadaan tertutup yang dapat
menghubungkan arus dari kolektor ke emiter yang mengakibatkan relay terhubung.
Sedangkan fungsi dioda disini adalah untuk melindungi transistor dari tegangan
induksi berlebih, dimana tegangan ini dapat merusak transistor.
Jika transistor pada basis tidak ada arus maju, transistor terbuka sehingga arus
tidak mengalir dari kolektor ke emiter, relay tidak bekerja karena tidak ada arus yang
Bentuk relay yang digunakan da bentuk relay dengan rangkaian driver dapat dilihat
pada gambar2.24.
Vcc
Tr VB
Dioda
a. Simbol b. Relay dengan rangkaian driver
Gambar 2.8 Simbol Relay dan Rangkaian Driver
2.6 Motor Langkah (Stepper)
Motor langkah (stepper) banyak digunakan dalam berbagai aplikasi, dipergunakan
apabila dikehendaki jumlah putaran yang tepat atau di perlukan sebagian dari putaran
motor. Suatu contoh dapat di jumpai pada disk drive, untuk proses pembacaan
dan/atau penulisan data ke/dari cakram(disk), head baca-tulis ditempatkan pada
tempat yang tepat di atas jalur atau track pada cakram, untuk head tersebut di
hubungkan dengan sebuah motor langkah.
Aplikasi penggunaan motor langkah dapat juga di jumpai dalam bidang
industri atau untuk jenis motor langkah kecil dapat di gunakan dalam perancangan
misalnya, dalam proses pengeboran logam yang menghendaki ketepatan posisi
pengeboran, dalam hal ini di lakukan oleh sebuah robot yang memerlukan ketepatan
posisi dalam gerakan lengannya dan lain-lain.
Pada gambar 2.7 di bawah ini ditunjukkan dasar susunan sebuah motor
langkah (stepper). A
B
Gambar 2.9 Diagram Motor Langkah ( stepper )
2.7 Seven Segment
Seven segment merupakan cacah segment minimum yang dipergunakan untuk menampilkan angka 0 sampai 9 seperti yang diilustrasikan pada gambar dibawah ini.
Gambar 2.10 Tampilan Seven Segment
D C U
S
A
Sejumlah karakter alphabet juga bisa disajikan menggunakan tampilan seven segment
ini.
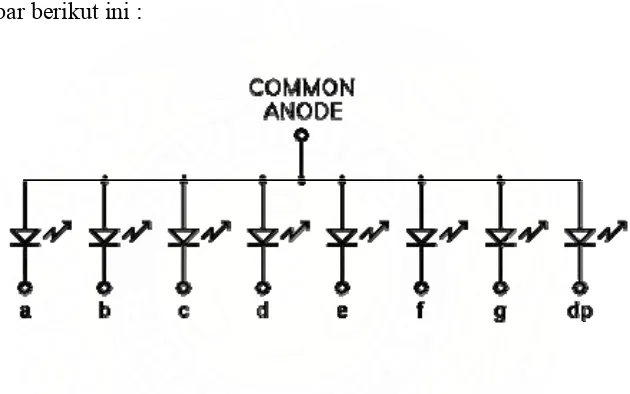
Seven segment terdiri dari 2 konfigurasi, yaitu common anoda dan common katoda. Pada seven segment tipe common anoda, anoda dari setiap LED dihubungkan menjadi satu kemudian dihubungkan ke sumber tegangan positip dan katoda dari
masing-masing LED berfungsi sebagai input dari seven segment, seperti ditunjukkan pada gambar berikut ini :
Gambar 2.11 Konfigurasi Seven Segmen Tipe Common Anoda
Sesuai dengan gambar di atas, maka untuk menyalakan salah satu segment,
maka katodanya harus diberi tegangan 0 volt atau logika low. Misalnya jika segmen a akan dinyalakan, maka katoda pada segment a harus diberi tegangan 0 volt atau logika
low, dengan demikian maka segment a akan menyala. Demikian juga untuk segmen lainnya.
berfungsi sebagai input dari seven segment, seperti ditunjukkan pada gambar berikut ini :
Gambar 2.12 Konfigurasi Seven Segment Tipe Common Katoda
Sesuai dengan gambar 2.6 di atas, maka untuk menyalakan salah satu segment,
maka anodanya harus diberi tegangan minimal 3 volt atau logika high. Misalnya jika segment a akan dinyalakan, maka anoda pada segment a harus diberi tegangan
minimal 3 volt atau logika high, dengan demikian maka segmen a akan menyala. Demikian juga untuk segment lainnya.
BAB 3
RANGKAIAN PADA SISTEM PENGATUR BUKA / TUTUP ATAP
DAN PEMANAS RUANGAN
3.1 Rangkaian Power Supplay (PSA) 3.1.1 Prinsip Kerja Rangkaian
Pada rangkaian ini terdapat sebuah trafo CT yang merupakan trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC.
Kemudian 12 volt AC akan disearahkan dengan menggunakan dua buah dioda,
selanjutnya 12 volt DC akan diratakan oleh kapasitor 3300 F. Dua buah dioda
berikutnya berfungsi untuk menahan arus yang ada pada regulator agar tidak balik jika
terjadi penarikan arus sesaat dari tegangan 12 volt. Regulator tegangan 5 volt (7805)
digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada
tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan.
Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
Rangkaian power supplay ditunjukkan pada gambar 3.2 berikut ini :
3.1.2 Fungsi Rangkaian
Adapun fungsi dari rangkaian power supplay (PSA) adalah sebagai sumber tegangan
keseluruh rangkaian yang ada. Tegangan keluaran dari rangkaian ini terdiri dari dua,
yaitu 5 volt dan 12 volt DC. Tegangan 5 V DC digunakan kerangkaian
mikrokontroler, rangkaian ADC 0804, rangkaian keypad, rangkaian display seven segment yang terdapat pada sistem rangkaian pengaturan atap dan pemanas ruangan otomatis secara keseluruhan. Sedangkan tegangan 12 V DC digunakan untuk relay
yang terdapat pada rangkaian pengendali blower dan juga mensupplay tegangan ke
driver motor stepper.
3.2 Rangkaian Sensor Temperatur dan ADC (Analog to Digital Converter) 3.2.1 Prinsip Kerja Rangkaian
Pada rangkaian ini, ADC yang digunakan adalah ADC 0804 8 bit. Untuk mengetahui
temperatur dalam ruangan, digunakan LM35 yang merupakan sensor temperatur. Pada
rangkaian input ADC dihubungkan ke sensor LM35,sehingga setiap perubahan
tegangan pada LM35 akan diolah ADC.
Agar output yang dihasilkan oleh ADC bagus, maka tegangan refrensi ADC
harus benar-benar stabil, karena perubahan tegangan refrensi pada ADC akan
merubah output ADC tersebut. Oleh sebab itu pada rangkaian ADC di atas tegangan
masukan 12 volt dimasukkan ke dalam IC regulator tegangan 9 volt ( 7809) agar
keluarannya menjadi 9 volt, kemudian keluaran 9 volt ini dimasukkan kedalam
regulator tegangan 5 volt (7805), sehingga keluarannya menjadi 5 volt. Tegangan 5
tegangan masukan turun setengahnya, yaitu dari 12 volt menjadi 6 volt, tegangan
refrensi ADC tetap 5 volt.
Output dari LM35 ini dimasukkan sebagai input ADC. Rangkaiannya seperti gambar
3.4 dibawah ini:
Gambar 3.2 Rangkaian Sensor Temperatur dan ADC
Output dari LM35 diinputkan ke pin 6 ADC yang merupakan pin input, ini
berarti setiap perubahan tegangan yang terjadi pada input ini maka akan terjadi
perubahan pada output ADC.
Keluaran dari rangkaian sensor suhu dihubungkan ke rangkaian ADC untuk
diubah datanya menjadi data biner agar dapat dikenali oleh mikrokontroler AT89S51.
Untuk mendapatkan Vref/2 digunakan dioda zener 5,1 volt, kemudian
Output dari ADC dihubungkan ke mikrokontroler, sehingga setiap perubahan
output ADC yang disebabkan oleh perubahan inputnya (sensor temperatur LM 35)
akan diketahui oleh mikrokontoler.
3.2.2 Fungsi Rangkaian
Rangakaian ADC ini berfungsi untuk merubah data analog yang dihasilkan oleh
sensor temperatur menjadi data digital. Sebagaimana yang telah kita ketahui, bahwa
data yang dapat diolah oleh mikrokontroler adalah data dalam bentuk digital,
sedangkan data keluaran yang dihasilkan oleh sensor temperatur LM35 adalah dalam
bentuk analog. Oleh sebab itu data hasil pengukuran temperatur oleh LM 35 terlebih
dahulu diubah dalam bentuk digital, setelah itu output dari ADC dihubungkan ke
mikrokontroler. Sehingga mikrokontroler dapat mengetahui temperatur yang terdapat
didalam rungan. Dengan demikian pemanasan ruangan dapat dilakukan dengan
otomatis.
3.3 Rangkaian Keypad
3.3.1 Prinsip Kerja Rangkaian
Rangkaian keypad yang digunakan adalah rangkaian keypad yang telah ada dipasaran.
Keypad ini terdiri dari 16 tombol yang hubungan antara tombol – tombolnya seperti tampak pada gambar 3.7. Rangkaian ini di hubungkan ke port 2 mikrokontroler
Kemudian data yang diketikkan pada keypad akan diterima oleh
mikrokontroler AT89S51 untuk kemudian diolah dan ditampilkan pada display seven
segment. Rangkaian keypad ditunjukkan pada gambar berikut ini :
Gambar 3.3 Rangkaian Keypad
3.3.2 Fungsi Rangkaian
Adapun fungsi rangkaian keypad adalah sebagai tombol untuk memasukkan nilai
temperature yang akan dikendalikan apabila tombol – tombol yang ada pada keypad
ditekan.
3.4 Rangkaian Sensor Cahaya 3.4.1 Prinsi Kerja Rangkaian
Untuk dapat menggerakan driver motor stepper, maka alat dilengkapi dengan sebuah
L D R
4 K 7 1 0 0 K
3 3 0 O h m
4 K 7
C 9 4 5
+ 5 V + 5 V
P 1 . 4
Gambar 3.4 Rangkaian Sensor Cahaya
LDR atau Light Dependent Resistor adalah salah satu jenis resistor yang nilai hambatannya dipengaruhi oleh cahaya yang diterima olehnya. LDR dibuat dari
Cadmium Sulfida yang peka terhadap cahaya. Seperti yang telah diketahui bahwa
cahaya memiliki dua sifat yang berbeda yaitu sebagai gelombang elektromagnetik dan
foton/partikel energi (dualisme cahaya). Saat cahaya menerangi LDR, foton akan
menabrak ikatan Cadmium Sulfida dan melepaskan elektron. Semakin besar intensitas
cahaya yang datang, semakin banyak electron yang terlepas dari ikatan. Sehingga
hambatan LDR akan turun saat cahaya meneranginya.
LDR akan mempunyai hambatan yang sangat besar saat tak ada cahaya yang
mengenainya (gelap). Dalam kondisi ini hambatan LDR mampu mencapai 1 M Ohm.
Akan tetapi saat terkena cahaya, hambatan LDR akan turun secara drastis, hingga
kira-kira 250 Ohm.
Pada saat LDR dikenai cahaya, besar tegangan yang diumpankan ke transistor
adalah:
Tegangan tersebut akan mengkatifkan transistor C945. Pada saat aktif,
kolektornya akan mendapatkan tegangan 0 Volt dari ground. Tegangan 0 volt inilah
yang merupakan sinyal low (0) yang diumpankan ke mikrokontroler AT89S51.
Pada saat tidak ada cahaya yang mengenai LDR, tegangan yang diumpankan
ke transistor adalah:
Tegangan tersebut belum dapat mengaktifkan transistor C945. Dengan
demikian tegangan kolektor-emitornya berkisar antara 4,5 V – 5 V. Tegangan inilah
yang merupakan sinyal high (1) yang diumpankan pada mikrokontroler AT 89S51.
3.4.2 Fungsi Rangkaian
Sensor cahaya dipasang pada rangkaian ini dengan tujuan untuk mendeteksi apakah
cuaca sedang cerah atau gelap. Ketika cerah, cahaya yang mengenai LDR akan sangat
berlimpah, sehingga mikrokontroler akan mendapatkan sinyal low. Selanjutnya,
mikrokontroler akan mengirim data pada rangkaian driver motor untuk segera
membuka atap.
Sebaliknya ketika cuaca mendung, cahaya yang mengenai LDR akan
berkurang. Sensor cahaya ini akan segera mengirim sinyal high pada mikrokontroler.
3.5 Rangkaian Saklar Batas 3.5.1 Prinsip Kerja Rangkaian
Ketika mikrokontroler memerintahkan motor untuk membuka atap, mikrokontroler
tidak mengetahui apakah atapsudah terbuka penuh atau belum. Hal yang sama juga
terjadi ketika mikrokontroler memerintahkan motor untuk menutup atap,
mikrokontroler tidak mengetahui apakah atap sudah tertutup rapat atau belum. Karena
itu dibutuhkan sebuah saklar batas yang dapat mengetahui kedua keadaan tersebut.
Dalam hal ini digunakan sebuah saklar batas untuk buka atap, yang berfungsi
untuk mengetahui apakah atap sudah terbuka penuh atau belum, dan sebuah saklar
batas untuk tutup pintu gerbang yang berfungsi untuk mengetahui apakah atap sudah
tertutup rapat atau belum. Rangkaian saklar batas untuk buka atap hanya terdiri dari
sebuah saklar yang dihubungkan ke ground dan ke mikrokontroler AT89S51
Rangkaiannya seperti gambar dibawah ini,
(AT89S51)
Gambar 3.5 Rangkaian Saklar batas untuk Buka / Tutup Atap
Ketika saklar batas dalam keadaan terbuka, kondisi outputnya adalah high.
Namun jika atap menyentuh saklar, maka outputnya akan terhubung ke ground, yang
menyebabkan kondisi outputnya akan berubah dari high (1), menjadi low (0).
tanda bahwa atap telah terbuka lebar, maka mikrokontroler akan memerintahkan
motor stepper untuk berhenti berputar, sehingga atap tidak terbuka lebih lebar lagi.
Saklar batas untuk tutup atap juga mempunyai rangkaian dan cara kerja yang
sama dengan rangkaian saklar batas untuk buka pintu, perbedaannya hanya terletak
pada hubungannya dengan mikrokontroler AT89S51.
3.5.2 Fungsi Rangkaian
Rangkaian ini dibuat agar mikrokontroler dapat mengetahui atap sudah terbuka penuh
atau sudah tertutup penuh. Mikrokontroler akan mengambil tindakan untuk
menghentikan putaran motor stepper.
3.6 Rangkaian Mikrokontroler AT89S51 3.6.1 Prinsip Kerja Rangkaian
Mikrokontroler ini memiliki 32 port I/O, yaitu port 0, port 1, port 2 dan port 3. Pin 32
sampai 39 adalah Port 0 yang merupakan saluran / bus I/O 8 bit. Pin 1 sampai 8 adalah
port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10 sampai 17 adalah port 3 Pin 40
dihubungkan ke sumber tegangan 5 volt. Dan pin 20 dihubungkan ke ground.
Rangkaian mikrokontroler ini menggunakan komponen kristal 12 MHz sebagai
sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler
dalam mengeksekusi suatu perintah tertentu.
Pada pin 9 dihubungkan dengan sebuah kapasitor 10 uF yang dihubungkan ke
ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah
power aktif. Lamanya waktu antara aktifnya power pada IC mikrokontroler dan
aktifnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut. Jika
dihitung maka lama waktunya adalah :
10 10 1 det
t=R x C= KΩ x μF = m ik
Jadi 1 mili detik setelah power aktif pada IC kemudian program aktif.
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada.
Komponen utama dari rangkaian ini adalah IC mikrokontroler AT89S51. Pada IC
inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang
dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar 3.3 berikut ini:
3.6.2 Fungsi Rangkaian
Rangkaian ini menggunakan AT89S51 sebagai mikrokontrolernya. Adapun fungsi
dari rangkaian ini adalah sebagai pusat kendali dari seluruh sistem yang ada dan
sebagai pusat pemrosesan data hasil pengukuran sensor temperature LM 35 dan sensor
cahaya LDR yang telah diubah menjadi data digital oleh ADC 0804.
3.7 Rangkaian Relay Pengendali Pemanas (Blower) 3.7.1 Prinsip Kerja Rangkaian
Pada rangkaian ini digunakan relay sebagai saklar penghubung atau pemutus tegangan
yang dapat menghidupkan / mematikan peralatan elektronik (dalam hal ini blower).
Pada rangkaian di bawah ini, untuk menghubungkan rangkaian dengan 220 V AC
digunakan relay. Relay merupakan salah satu komponen elektronik yang terdiri dari
lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan
medan magnet. Pada rangkaian ini digunakan relay 12 volt, ini berarti jika positif
relay (kaki 1) dihubungkan ke sumber tegangan 12 volt dan negatif relay (kaki 2)
dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana
medan magnet ini akan menarik logam yang mengakibatkan saklar (kaki 3) terhubung
ke kaki 4. Dengan demikian, jika kita gunakan kaki 3 dan kaki 4 pada relay sebagai
saklar untuk menghidupkan/mematikan lampu maka kita dapat menghidupkan/
mematikan blower dengan cara mengaktifkan atau menon-aktifkan relay.
Blower
Gambar 3.7 Rangkaian Relay Pengendali Blower 220 volt AC
Hubungan yang digunakan adalah normally open. Prinsip kerja rangkaian ini
pada dasarnya memanfaatkan fungsi transistor sebagai saklar digital. Tegangan atau
sinyal pemicu dari transistor berasal dari mikrokontroler Port 3.6. Pada saat logika
pada port 3.6 adalah tinggi (high), maka transistor mendapat bias dari tegangan bias
dari kaki basis. Dengan adanya tegangan bias ini maka transistor akan aktif
(saturation), sehingga adanya arus yang mengalir kekumparan relay. Hal ini akan
menyebabkan saklar pada relay menjadi terbuka sehingga hubungn sumber tegangan
220 Volt terhubung ke blower. Begitu juga sebaliknya pada saat logika pada P3.6
adalah rendah (low) maka relay tedak dialiri arus. Hal ini akan menyebabkan saklar
pada relay terputus, sehingga sumber tegangan 220 Volt dengan blower terputus dan
blower tidak menyala.
Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus
dihubungkan ke relay tersebut. Dioda dihubungkan secara terbalik sehingga secara
dinon-aktifkan, pada saat ini arus akan terus mengalir melalui kumparan dan arus ini akan
dialirkan ke dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke
transistor, yang mengakibatkan kerusakan pada transistor.
Rangkaian ini juga dilengkapi dengan LED indicator, dimana LED indikator ini akan
menyala, jika relay aktif dan sebaliknya, LED indikator ini akan mati jika relay tidak
aktif. LED indikator ini dikendalikan oleh sebuah transistor jenis PNP, dimana basis
transistor ini mendapatkan input dari kolektor transistor C945. Transistor tipe PNP
akan aktif jika mendapat tegangan 0 volt pada basisnya.
3.7.2 Fungsi rangkaian
Rangkaian relay pengendali blower berfungsi untuk memutuskan atau
menghubungkan sumber tegangan 220 V AC dengan blower (pemanas). Adapun
fungsi blower (pemanas) adalah untuk meningkatkan temperature apabila temperature
yang terukur oleh sensor temperature LM35 lebih kecil dari temperatur yang
diinginkan.
3.8Rangkaian Driver Motor Stepper 3.8.1 Prinsip Kerja Rangkaian
Mikrokontroler tidak dapat langsung mengendalikan putaran dari motor stepper,
karena itu dibutuhkan driver sebagai perantara antara mikrokontroler dan motor
stepper, sehingga perputaran dari motor stepper dapat dikendalikan oleh
mikrokontroler. Rangkaian driver motor stepper ditunjukkan pada gambar 3.9 berikut
Gambar 3.8 Rangkaian Driver Motor Stepper
Driver ini berfungsi untuk memutar motor stepper searah dengan jarum jam
atau berlawanan arah dengan jarum jam. Rangkaian ini akan dikendalikan oleh
mikrokontroler AT89S51. Jadi dengan memberikan sinyal high secara bergantian ke
input dari rangkaian motor stepper tersebut, maka pergerakan motor stepper sudah
dapat dikendalikan oleh mikrokontroler AT89S51. Rangkaian driver motor stepper ini
terdiri dari empat masukan dan empat keluaran, dimana masing – masing masukan
dihubungkan dengan mikrokontroler AT89S51 dan keluarannya dihubungkan ke
motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal
high (1) secara bergantian pada kempat masukannya.
Rangkaian ini terdiri dari 4 buah transistor NPN TIP 122. Masing – masing
transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler AT89S51.
basis dari masing – masing transistor diberi tahanan 1 Kohm untuk membatasi arus
yang masuk ketransistor. Kolektor dihubungkan dengan kumparan yang terdapat pada
emitter dihubungkan ke ground. Jika P0.0 diberi logika high (1), yang berarti basis
pada transistor TIP 122 mendapat tegangan 5 volt, maka transistor akan aktif. Hal ini
akan mnyebabkan terhubungnya kolektor dengan emitor, sehingga kolektor
mendapatkan tegangan 0 volt dari ground. Hal ini akan menyebabkan arus akan
mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan
menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada
motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet
tersebut. Seterusnya jika logika high diberikan secara bergantian pada input driver
motor stepper, maka motor stepper akan berputar sesuai dengan arah ylogika high (1)
yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah sebelumnya maka
logika high (1) pada input driver motor stepper harus diberikan secara bergantian
dengan arah yang berlawanan dengan sebelumnya.
3.8.2 Fungsi Rangkaian
Rangkaian Driver Motor Stepper berfungsi untuk mengendalikan putaran motor
stepper searah atau berlawanan dengan arah putaran jarum jam, karena
mikrokontroler tidak dapat langsung mengendalikan motorstepper. Sehingga putaran
motor stepper dapat diatur yang secara otomatis menggerakkan atap (mengatur
terbuka / tertutupnya atap ruangan).
3.9Rangkaian Display Seven Segment 3.9.1 Prinsip Kerja Rangkaian
Pada rangkaian ini menggunakan 3 buah seven segment common anoda sebagai
Rangkaian display seven segment ditunjukkan pada gambar 3.5 berikut ini :
Gambar 3.9 Rangkaian Display Seven Segment
IC ini akan merubah 8 bit data serial yang masuk menjadi keluaran 8 bit data
paralel. Rangkaian ini dihubungkan dengan P3.0 dan P3.1 AT89S51. P3.0 merupakan
fasilitas khusus pengiriman data serial yang disediakan oleh mikrokontroler AT89S51.
Sedangkan P3.1 merupakan sinyal clock untuk pengiriman data serial.
Dengan menghubungkan P3.0 dengan IC serial to paralel (IC 4094), maka
data serial yang dikirim akan diubah menjadi data paralel. Kemudian IC 4094 ini
dihubungkan dengan seven segment agar data tersebut dapat ditampilkan dalam
bentuk angka. Seven segment yang digunakan adalah tipe common anoda (aktif low),
ini berarti segmen akan menyala jika diberi data low (0) dan segment akan mati jika
3.9.2 Fungsi Rangkaian
Rangkaian ini digunakan untuk menampilkan nilai suhu yang dideteksi oleh sensor
temperature LM35. Adapun nilai yang ditampilkan adalah dalam bentuk decimal 3
digit, karena pada rangkaian ini menggunakan 3 buah display seven segment.
Tabel 3.1 Pengolahan data suhu yang terukur oleh rangkaian ADC serta tampilan hasil
pengolahan data pada display seven segment
BAB 4
RANGKAIAN SISTEM KESELURUHAN DAN PEMROGRAMAN
4.1 Rangkaian Sistem Pengatur Buka / Tutup Atap dan Pemanas Ruangan
Peralatan elektronika merupakan gabungan dari beberapa jenis rangkaian dengan
fungsi dan karakteristik yang berbeda – beda yang tersusun menjadi satu kesatuan.
Walaupun tiap rangkaian memiliki tiap rangkaian memiliki fingsi dan karakterisitik
yang berbeda – beda tetapi dalam mekanisme kerja semua rangkaian – rangkaian
tersebut saling melakukan kerja yang terintegrasi. Sehingga kerja yang dihasilkan juga
sesuai dengan yang diharapkan.
Seperti yang telah dijelaskan pada bab 3 sebelumnya, bahwa terdapat beberapa
rangkaian dengan prinsip kerja dan fungsi yang berbeda – beda untuk tiap jenis
rangkaian. Rangkaian – rangkaian tersebut selanjutnya dihubungkan sedemikian rupa
antara satu dengan yang lainnya sesuai dengan mekanisme kerja yang diharapkan.
Pada rangkaian sistem pengatur buka / tutup atap dan pemanas ruangan ini adalah
gabungan dari beberapa rangkaian yang terintegrasi. Adapun rangkaian – rangkaian
AT89S51. Mengenai prinsip kerja dan fungsi dari masing – masing rangkaian telah dijelaskan pada bab sebelumnya. Gambar Rangkaian keseluruhan terlampir.
4.2 Pengujian Rangkaian Mikrokontroller AT89S51
Untuk mengetahui apakah rangkaian mikrokontroller AT89S51 telah bekerja dengan
baik, maka dilakukan pengujian.Pengujian bagian ini dilakukan dengan memberikan
program sederhana pada mikrokontroller AT89S51. Programnya adalah sebagai
berikut:
Loop: Setb P3.7 Acall tunda Clr P3.7 Acall tunda Sjmp Loop Tunda:
Mov r7,#255
Tnd: Mov r6,#255 Djnz r6,$
Djnz r7,tnd Ret
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke P3.7 selama
± 0,13 detik kemudian mematikannya selama ± 0,13 detik secara terus menerus.
Perintah Setb P3.7 akan menjadikan P3.7 berlogika high yang menyebabkan LED
mati. Acall tunda akan menyebabkan LED ini mati selama beberapa saat. Perintah Clr
P3.7 akan menjadikan P3.7 berlogika low yang menyebabkan LED akan nyala.
Perintah Sjmp Loop akan menjadikan program tersebut berulang, sehingga akan
tampak LED tersebut tampak berkedip.
4.3 Pengujian Rangkaian ADC
Pengujian pada bagian rangkaian ADC ini dapat dilakukan dengan
menghubungkan rangkaian ADC ini dengan rangkaian mikrokontroler. Selanjutnya
rangkaian mikrokontroler dihubungkan dengan rangkaian display seven segment.
Mikrokontroler diisi dengan program untuk membaca nilai yang ada pada rangkaian
ADC, kemudian hasil pembacaannya ditampilkan pada display seven segment.
Programnya adalah sebagai berikut :
mov a,p2 mov b,#100 div ab mov 70h,a mov a,b mov b,#10 div ab mov 71h,a mov 72h,b
Dengan program di atas, maka akan tampil nilai temperatur yang dideteksi oleh sensor
4.4 Mekanisme Kerja dan Diagram Blok Sistem Pengatur Buka/Tutup Atap dan Pemanas Ruangan
Diagram blok merupakan gambaran dasar dari rangkaian sistem yang akan dirancang.
Setiap diagram blok mempunyai fungsi masing-masing. Adapun diagram blok dari
sistem yang dirancang adalah seperti yang diperlihatkan pada gambar 4.2. berikut ini:
ADC
Desain sistem rangkaian terdiri dari:
1. Sensor suhu (LM35) berfungsi untuk mengukur suhu ruangan kemudian output sensor ini akan diinputkan ke ADC0804.
2. ADC0804 berfungsi untuk merubah tegangan analog dari sensor suhu menjadi data digital 8 bit, sehingga data tersebut dapat diolah oleh mikrokontroler AT89S51.
3. Keypad 4 x 4 berfungsi untuk memasukkan nilai temperatur yang akan dipertahankan di dalam ruangan, kemudian data dari keypad ini dikirim
kemikrokontroler AT89S51. Selanjutnya nikrokontroler AT89S51 akan
membandingkan data hasilpengukuran sensor LM 35 yang telah diubah kedalam
pengendalian temperatur dapat dilakukan sesuai dengan besar temperature yang
diinginkan.
4. Display berfungsi untuk menampilkan hasil pembacaan suhu pada sensor suhu (LM35) yang berada dalam ruangan
5. Mikrokontroler AT89S51 berfungsi untuk mengolah data digital yang dikirimkan oleh ADC0804, selanjutnya mikrokontroller akan menampilkan nilai suhu yang
terukur pada seven segment kemudian membandingkannya data dalam ruangan
dengan temperature yang kita inginkan melalui data masukan dari keypad untuk
kemudian mengambil tindakan (menghidupkan/mematikan blower).
6. Relay berfungsi sebagai perantara antara mikrokontroler yang memiliki tegangan 12 volt DC dengan blower yang memiliki tegangan 220 volt AC, sehingga blower
dapat dikendalikan oleh mikrokontroler AT89S51.
Apabila temperatur dalam ruangan lebih kecil dari yang kita inginkan, maka
mikrokontroler AT89S51 akan mengirimkan data high (1) ke rangkaian driver
relay, sehingga saklar dalam relay akan terhubung dan arus akan mengalir yang
menyebabkan pemanas ( blower ) hidup. Apabila temperatur ruangan telah
mencapai temperatur yang diinginkan sesuai dengan data masukan dari keypad,
maka pemanas (blower) akan mati secara otomatis.
7. Blower berfungsi untuk memanaskan ruangan yang akan dikendalikan oleh mikrokontroler setelah mendapatkan data dari sensor suhu (LM35).
8. Sensor cahaya (LDR) berfungsi untuk mendeteksi ada tidaknya cahaya sinar matahari yang kemudian output sensor ini diinputkan ke penguat sinyal. Penguat
sinyal berfungsi untuk memperkuat sinyal dari sensor cahaya menjadi logika 1
9. Driver stepper berfungsi untuk menggerakan motor stepper yang telah diolah data dari mikrokontroler.
4.5 Diagram Alir (Flowchart) dan program pada pemanas ruangan
1. Diagram Alir (Flowchart)
Gambar 4.2 Diagram Alir (Flowchart) Rangkaian Pemanas Ruangan
Start