PENGUJIAN RANGKAIAN ROTARY ENCODER MENGGUNAKAN
HALL EFFECT SENSOR UNTUK MENGUKUR
PERUBAHAN TINGGI MUKA AIR
ANRIA
DEPARTEMEN GEOFISIKA DAN METEOROLOGI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
ABSTRACT
ANRIA. Rotary Encoder Series Testing by Using Hall Effect Sensor to Measure Water Level
Change. Supervised by Prof. Dr. Ir Hidayat Pawitan and Ir. Bregas Budianto, Ass. Dpl
One of hydrology parameter is water level. Water level could describe characteristic of a watershed. The change of waterlevel can be measured by using water level floating type recorder. This tool works by measuring the direction and distance of movement through the rotation of pulley which rotated because of the waterlevel change. Commonly, that tool built with movement sensor and movement (rotary) encoder series. Rotary encoder series can be built by using IC (integrated circuit) 4093. By using hall effect sensor as movement sensor which is give input to rotary encoder series, water level change can be measured. Output signal from rotary encoder series have to process to get distance of water level change. Inverter series and monostable positive - negative edge trigger series with OR gates circuit as lattest output are aplide on that process. On this research, a half rotation on pulley produce a movement signal. Distance of that movement depend on pulley size. By using the 1cm diameter pulley, the resolution is about 1,57cm.
ABSTRAK
ANRIA. Pengujian Rangkaian Rotary Encoder Menggunakan Hall Effect Sensor Untuk
Mengukur Perubahan Tinggi Muka Air. Dibimbing oleh Prof.Dr. Ir Hidayat Pawitan dan Ir. Bregas Budianto, Ass. Dpl
Tinggi muka air merupakan salah satu parameter hidrologi. Tinggi muka air dapat menggambarkan karakteristik suatu daerah aliran sungai. Perubahan tinggi muka air dapat diukur dengan menggunakan alat ukur tinggi muka air tipe pelampung. Cara kerja dari alat tipe ini adalah
dengan mengukur arah dan besar perubahan berdasarkan pergerakan pulley yang berputar karena
adanya perubahan tinggi muka air. Pada alat tersebut umumnya terdapat sensor gerakan dan rangkaian penerjemah arah gerakan. Rangkaian penerjemah gerakan dapat dibentuk dari IC
(integrated circuit) seri 4093. Dengan menggunakan hall effect latch sensor sebagai sensor
gerakan yang memberikan input bagi rangkaian penerjemah arah gerakan, perubahan tinggi muka air dapat diketahui. Untuk dapat mengetahui besar perubahan tinggi muka air perlu dilakukan pengolahan terhadap sinyal output dari rangkaian penerjemah arah gerakan. Pengolahan sinyal
tersebut dilakukan dengan menambahkan rangkaian inverter serta rangkaian monostable positive -
negative edge trigger dengan output terakhir pada sirkuit dengan gerbang OR. Pada penelitian ini,
untuk setengah putaran pada pulley dihasilkan satu sinyal yang menandakan gerakan naik ataupun
turun. Besar gerakan tersebut dipengaruhi oleh ukuran pulley, Dengan menggunakan pulley
bediameter 1cm didapatkan resolusi sebesar 1.57cm.
PENGUJIAN RANGKAIAN ROTARY ENCODER MENGGUNAKAN
HALL EFFECT SENSOR UNTUK MENGUKUR
PERUBAHAN TINGGI MUKA AIR
ANRIA
Skripsi
sebagai salah satu syarat untuk meraih gelar Sarjana Sains pada Mayor Meteorologi Terapan Departemen Geofisika dan Meteorologi
DEPARTEMEN GEOFISIKA DAN METEOROLOGI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
Judul Skripsi : Pengujian Rangkaian Rotary Encoder Menggunakan Hall Effect Sensor Untuk
Mengukur Perubahan Tinggi Muka Air
Nama : Anria
NIM : G24070050
Menyetujui,
Dosen Pembimbing I Dosen Pembimbing II
Prof. Dr. Ir. Hidayat Pawitan Ir. Bregas Budianto, Ass. Dpl
NIP. 19500430 197412 1 001 NIP. 19640308 199403 1 002
Mengetahui,
Ketua Departemen Geofisika dan Meteorologi
Dr. Ir. Rini Hidayati, MS. NIP. 19600305 198703 2 002
KATA PENGANTAR
Puji syukur kehadirat Allah SWT yang telah melimpahkan rahmat-Nya sehingga penulis
dapat menyelesaikan tugas akhir ini yang berjudul “Pengujian Rangkaian Rotary Encoder
Menggunakan Hall Effect Sensor Untuk Mengukur Perubahan Tinggi Muka Air”.
Penelitian dan penulisan skripsi ini tidak lepas dari bantuan banyak pihak. Pada kesempatan ini penulis mengucapkan terimakasih kepada bapak Hidayat Pawitan dan bapak Bregas Budianto atas bimbingannya dalam menyelesaikan tugas akhir ini. Rasa terimakasih juga penulis sampaikan kepada bapak/ibu dosen program studi meteorologi terapan yang telah banyak memberikan ilmu bagi penulis, staf Departemen Geofisika dan Meteorologi, serta teman – teman GFM44. Rasa terimakasih ini juga penulis sampaikan untuk keluarga tercinta yang telah memberikan banyak hal yang dibutuhkan penulis untuk menyelesaikan tugas akhir ini.
Pada penelitian ini penulis mencoba memberikan alternatif penggunaan sensor untuk alat ukur tinggi muka air tipe pelampung. Tidak seperti alat setipe yang dulu pernah dikembangkan di
workshop instrumentasi meteorologi, sensor yang terdapat pada alat ini memungkinkan
pengukuran pada aliran air dengan rentang tinggi muka air maksimum dan minimum yang besar,
karena pulley dapat berotasi tanpa batas. Agar dapat memberikan informasi gerakan naik ataupun
turun, kerja sensor tersebut didukung oleh rangkaian penerjemah arah gerakan. Untuk itu perlu dilakukan pengujian terhadap rangkaian penerjemah arah gerakan agar bisa memberikan output yang diharapkan.
Akhir kata, penulis minta maaf untuk segala kekurangan yang ada pada tulisan ini. Semoga tulisan ini bermanfaat bagi banyak banyak orang.
Bogor, Agustus 2011
RIWAYAT HIDUP
Penulis dilahirkan di Bukit Tinggi, Sumatera Barat, pada tanggal 14 Desember 1988. Penulis merupakan anak ke dua dari empat bersaudara dari pasangan orangtua Anwir dan Yenny Artaty.
Pendidikan formal, dari Sekolah Dasar sampai Sekolah Menengah Atas yang ditempuh oleh penulis dijalani di kota kelahiran. Setelah menyelesaikan pendidikan SMA pada tahun 2007, penulis diterima di Institut Pertanian Bogor setelah melewati Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN) pada tahun yang sama. Penulis diterima di jurusan Geofisika dan Meteorologi dengan mayor Meteorologi Terapan.
DAFTAR ISI
Halaman
DAFTAR TABEL ... x
DAFTAR GAMBAR ... x
I. PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan ... 1
II. TINJAUAN PUSTAKA 2.1 Tinggi Muka Air (Water Level) ... 1
2.2 Alat Ukur Tinggi Muka Air Tipe Pelampung ... 2
2.3 Sensor Gerakan... 2
2.3.1 Potensiometer ... 2
2.3.2 Switch Encoder ... 3
2.3.3 Hall effect sensor ... 3
2.4 Rangkaian Elektronik Penerjemah Arah Gerakan ... 4
2.5 Integrated Circuit ... 4
2.5.1 Integrated Circuit seri 4093 ... 4
2.5.2 Integrated Circuit seri 4069 ... 4
2.5.3 Integrated Circuit seri 4047 ... 4
2.5.4 Integrated Circuit seri 4066 ... 5
2.5.5 Integrated Circuit seri 4071 ... 5
III. METODOLOGI 3.1 Waktu dan Tempat Penelitian ... 5
3.2 Bahan dan Alat ... 6
3.3 Metodologi Penelitian ... 6
3.3.1 Rancangan Fisik Alat Untuk Pengujian Rangkaian Penerjemah Arah Gerakan ... 6
3.3.2 Pengujian Rangkaian Elektronik Penerjemah Arah Gerakan ... 6
3.3.2.1 Pengujian dengan Switch Encoder ... 7
3.3.2.2 Pengujian dengan Hall Sensor ... 7
3.3.3 Pemanfaatan Rangkaian Penerjemah Arah Gerakan Untuk Pengukuran Perubahan Tinggi Muka Air ... 7
3.3.3.1 Pengolahan Sinyal Output dari Rangkaian Penerjemah Arah Gerakan ... 7
3.3.3.2 Resolusi Pengukuran ... 7
3.3.3.3 Visualisasi Output Rangkaian Penerjemah Arah Gerakan ... 8
IV. HASIL DAN PEMBAHASAN 4.1 Rancangan Fisik Alat Untuk Pengujian Rangkaian Penerjemah Arah Gerakan ... 8
4.1.1 Pelampung ... 8
4.1.2 Pulley ... 8
4.1.3 Sumur Penenang (Stilling well)... 9
4.2 Pengujian Rangkaian Elektronik Penerjemah Arah Gerakan ... 9
4.2.1 Pengujian dengan Switch Encoder ... 9
4.2.2 Pengujian dengan Hall Sensor ... 10
4.2.2.1 Cara Kerja Sensor ... 10
4.2.2.2 Output Rangkaian Elektronik Penerjemah Arah Gerakan dengan input dari .Hall Sensor... 11
4.3 Pemanfaata Rangkaian Penerjemah Arah Gerakan Untuk Pengukuran Perubahan Tinggi Muka Air ... 11
4.3.1 Pengolahan Sinyal Output dari Rangkaian Penerjemah Arah Gerakan ... 11
4.3.1.1 Aplikasi Rangkaian Inverter (IC 4069) dan Analog Switch (IC 4066) ... 12
4.3.1.2 Aplikasi Rangkaian Monostable Positive-Negative Edge Trigger dan... ..Gerbang OR ... 12
4.3.3 Visualisasi Output Rangkaian Penerjemah Arah Gerakan ... 14
V. SIMPULAN DAN SARAN
5.1 Simpulan ... 14 5.2 Saran ... 14
DAFTAR TABEL
Halaman
1 Karakteristik switch encoder ... 3
2 Truth table untuk NAND gate ... 4
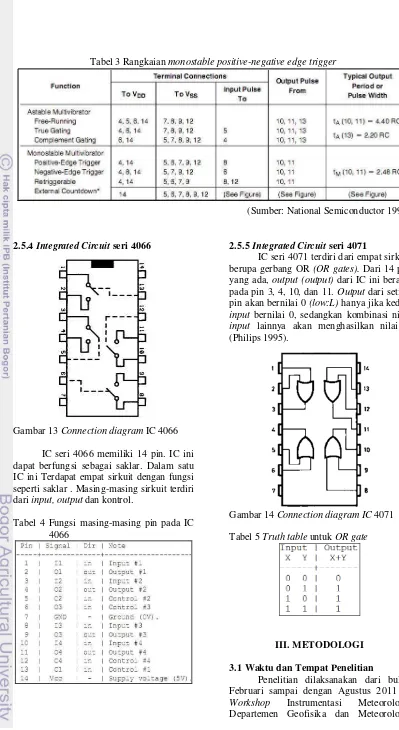
3 Rangkaian monostable positive-negative edge trigger ... 5
4 Fungsi masing-masing pin pada IC 4066 ... 5
5 Truth table untuk OR gate ... 5
6 Nilai sinyal output untuk gerakan naik ... 9
7 Nilai sinyal output untuk gerakan turun ... 9
8 Arah putaran pada pulley dan nilai output ... 11
DAFTAR GAMBAR Halaman 1 Penampang melintang sungai ... 1
2 Stage discharge rating curve ... 2
3 AWLR float type dengan pelampung dan pemberat yang terpisah ... 2
4 Potensiometer ... 2
5 Switch Encoder ... 3
6 Prinsip kerja hall effect sensor ... 3
7 Hall effect sensor tipe ATS 276 ... 3
8 Bentuk rangkaian pada Hall effect sensor tipe ATS 276 ... 3
9 Bentuk Rangkaian penerjemah arah gerakan ... 4
10 Functional diagram IC4093 ... 4
11 Connection diagram IC 4069 ... 4
12 Connection diagram IC 4047 ... 4
13 Connection diagram IC 4066 ... 5
14 Connection diagram IC 4071 ... 5
15 Rancangan alat ukur TMA tipe pelampung ... 6
16 Gaya pada pelampung ... 6
17 Rangkaian penerjemah arah gerakan ... 6
18 Rangkaian penerjemah arah gerakandengan input dari switch encoder ... 7
19 Rangkaian penerjemah arah gerakandengan input dari hall sensor ... 7
20 Resolusi pengukuran berdasarkan gerakan pulley ... 7
21 Pelampungdengan beberapa pilihan ukuran ... 8
22 Pulley yang terpasang pada pelampung ... 8
23 Gerakan pada detent, posisi switch dan bentuk pulsa ... 9
24 Diagram alir cara kerja sensor ... 10
25 Posisi pulley yang dipasangi magnet dan sensor hall ... 10
26 Perubahan posisi magnet dan nilai output karena putaran pada pulley ... 11
27 Sinyal keluaran untuk gerakan turun ... 11
28 Sinyal keluaran untuk gerakan naik ... 11
29 Perubahan bentuk sinyal setelah melewati rangkaian inverter ... 12
30 Output sinyal setelah melewati rangkaian monostable dan gerbang OR ... 12
31 Lingkaran dalam dan luar pada pulley ... 13
32 Resolusi Pengukuran ... 13
I. PENDAHULUAN
1.1 Latar Belakang
Sungai merupakan salah satu sumber air tawar yang penting keberadaannya bagi makhluk hidup di sekitarnya. Perusahaan Daerah Air Minum (PDAM) pada umumnya memanfaatkan air dari suatu sungai untuk memenuhi kebutuhan konsumennya. Pada beberapa tempat di indonesia, keberadaan sungai terkadang menjadi suatu ancaman, yaitu pada saat debit air yang mengalir melebihi kondisi normal, atau yang lebih dikenal dengan sebutan banjir. Karena pentingnya keberadaan sungai tersebut, kajian mengenai sungai ataupun daerah aliran sungai (DAS) sangatlah penting dan dibutuhkan demi menjamin ketersediaan air yang berkelanjutan dan terkendali.
Salah satu parameter hidrologi yang berkaitan dengan sungai adalah tinggi muka air (water level) sungai. Banyak hal yang bisa dicermati dengan mengetahui tinggi muka air (TMA) suatu aliran, diantaranya adalah debit aliran dan sistem aliran sungai. Kajian lebih lanjut mengenai TMA dan parameter hidrologi lainnya yang berkaitan dapat menggambarkan karakteristik suatu DAS. Pemahaman terhadap karakteristik suatu DAS akan sangat membantu dalam pengelolaan DAS maupun hal-hal lain yang berkaitan dengan DAS tersebut.
Ketersediaan alat ukur merupakan hal mendasar yang harus terpenuhi untuk ketersediaan data, termasuk data TMA. Data TMA bisa didapatkan melalui berbagai teknik pengukuran, baik itu manual ataupun
otomatis. Pengukuran TMA dengan
menggunakan alat ukur otomatis yang dapat merekam data secara kontinu merupakan salah satu pilihan dalam pengambilan data TMA yang berkelanjutan. Saat ini telah
dikembangkan berbagai macam alat
pengukuran TMA, diantaranya adalah alat ukur bertipe pelampung.
Alat ukur TMA bertipe pelampung dapat menggunakan berbagai jenis sensor, satu diantaranya adalah potensiometer. Sama dengan sensor yang lainnya, pada dasarnya sensor tersebut menerjemahkan arah dan perubahan tinggi muka air
berdasarkan gerakan pada pulley. Pada
penelitian terdahulu yang dilakukan oleh
Triesnawati (2006), potensiometer
digunakan sebagai sensor perubahan tinggi muka air. Alat ukur TMA dengan sensor tersebut memiliki beberapa keterbatasan,
diantaranya adalah rentang pengukuran yang terbatas.
Alat ukur tinggi muka air otomatis pada umumnya terdiri dari dua bagian
penting, yaitu bagian mekanik dan
elektronik. Kedua bagian tersebut memiliki peran yang sama pentingnya. Suatu alat pengukuran tinggi muka air akan dapat bekerja dengan baik apabila kedua bagian tersebut bekerja sesuai fungsinya. Pada penelitian ini akan dilakukan pengujian terhadap rangkaian elektronik penerjemah
arah gerakan dengan menggunakan hall
effect sensor sebagai sensor yang
memberikan input bagi rangkaian tersebut. Rangkaian tersebut akan menerjemahkan gerakan pada pulley.
1.2 Tujuan
Penelitian ini bertujuan untuk
menguji rangkaian penerjemah rotasi
(rotary encoder) yang akan digunakanuntuk
mengukur perubahan tinggi muka air dengan
menggunakan hall sensor.
II. TINJAUAN PUSTAKA
2.1 Tinggi Muka Air (Water Level)
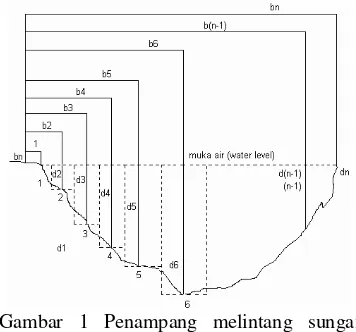
Tinggi muka air (TMA) merupakan salah satu parameter hidrologi pada sungai. TMA merupakan tinggi permukaan air yang diukur dari titik tertentu yang telah ditetapkan. Dalam kaitannya dengan debit aliran (Q), data TMA dapat digunakan untuk mengetahui luas penampang melintang suatu aliran (A) seperti yang tergambarkan pada
gambar 1. Dengan mengetahui luas
penampang melintang dan kecepatan aliran, akan dapat diketahui debit aliran dengan
menggunakan persamaan Bernoulli (the
continuity equation):Q = A . V
Gambar 1 Penampang melintang sungai
Menurut Asdak (1995), untuk aliran sungai tertentu, data TMA dapat langsung digunakan untuk menduga debit aliran. Debit sungai yang diduga melalui data TMA
tersebut merupakan suatu pendekatan
berdasarkan kurva hubungan debit aliran dan
TMA (stage discharge rating curve), untuk
itu dibutuhkan data TMA dan debit dalam jumlah banyak (tahunan). Hubungan antara debit aliran dan TMA tersebut dapat dilihat pada gambar berikut ini.
Gambar 2 Stage discharge rating curve
(sumber: http://www.corpsned ma nuals.us/)
Data TMA memiliki banyak
kegunaan. Untuk perencanaan bangunan yang berkaitan dengan perubahan TMA, seperti jembatan, bendungan, dan sistem irigasi, data TMA sangatlah dibutuhkan. Terkait dengan bencana banjir pada daerah hilir sungai, data TMA dapat dimanfaatkan sebagai indikator bagi kejadian banjir.
2.2 Alat Ukur Tinggi Muka Air Tipe
..Pelampung
Alat ukur tinggi muka air tipe pelampung merupakan salah satu alat ukur TMA. Pada alat ukur ini, perubahan TMA ditandai dengan pergerakan naik ataupun turun dari pelampung tersebut. Besar perubahan tinggi muka air akan diketahui
berdasarkan gerakan pada pulley yang akan
berputar ketika ada gerakan pada
pelampung. Benda yang akan digunakan sebagai pelampung haruslah mendapatkan gaya tekanan ke atas (Fa) yang lebih besar
dibadingkan gaya berat (w) benda itu
sendiri.
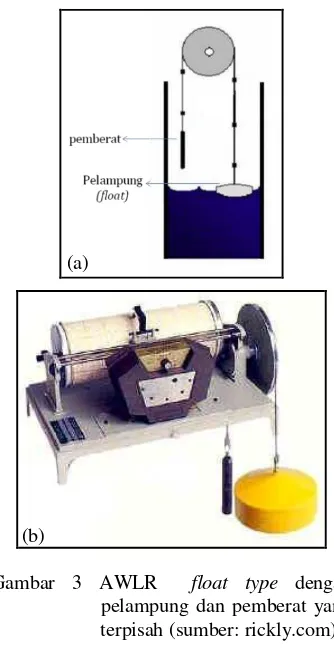
Alat ukur TMA tipe pelampung yang sebelumnya pernah dikembangkan, seperti pada gambar 3, memiliki pemberat dan
pelampung terpisah. Pelampung dan
pemberat tersebut terikat di tiap ujung tali
yang terpasang pada pulley. Pemberat
berfungsi sebagai pengimbang agar
pelampung tetap mengambang pada
permukaan air, sedangkan pelampung
sebagai pendeteksi naik turunnya permukaan air.
Gambar 3 AWLR float type dengan
..pelampung dan pemberat yang
..terpisah (sumber: rickly.com)
Pada dasarnya alat ukur TMA tipe pelampung memiliki prinsip kerja yang sama. Arah dan besar perubahan diketahui berdasarkan putaran pada pulley. Arah dan
besar perubahan tersebut merupakan input
bagi sensor untuk kemudian diterjemahkan menjadi sebuah informasi.
2.3 Sensor Gerakan
Peubahan atau gerakan dapat
dideteksi dengan menggunakan sensor. Sensor yang dapat dimanfaatkan untuk mendeteksi gerakan diantaranya adalah
potensiometer, switch encoder dan hall
effect sensor.
2.3.1 Potensiometer
Gambar 4 Potensiometer (sumber: Tanujaya
2010) (a)
Potensiometer merupakan salah satu jenis resistor. Potensiometer seperti yang terlihat pada gambar 4 merupakan variabel
resistor, yaitu resistor yang nilai
hambatannya dapat diubah dengan cara
memutar poros yang terdapat pada
potensiometer. Dalam pemanfaatannya
sebagai sensor gerakan (perubahan) TMA,
pergerakan pada pulley akan turut
menggerakan poros yang ada pada
potensiometer. Perubahan nilai hambatan akibat berputarnya poros tersebut merupakan
output dari potensiometer yang kemudian
diterjemahkan sebagai bentuk perubahan TMA (Triesnawati 2006).
2.3.2 Switch Encoder
Switch encoder merupakan
komponen elektronik yang memiliki cara kerja seperti saklar (switch). Dari segi fisik, alat ini memiliki ukuran yang kecil dengan tiga kaki (pin) dan poros rotasi pada bagian atas alat. Pada alat ini terdapat 24 detent
dengan dua output pulsa (fase A dan B) yang
berurutan untuk tiap dua detent yang
dilewati akibat adanya perputaran pada poros. Untuk satu putaran penuh (3600) pada
switch encoder, masing masing pulsa akan
muncul sebanyak 12 kali (Panasonic 2010).
Gambar 5 Switch encoder (sumber: http://
..dgkaihua.en.made-in-china.com/
..dan www.eehomepage.com/)
Tabel 1 Karakteristik switch encoder
M
2.3.3 Hall Effect Sensor
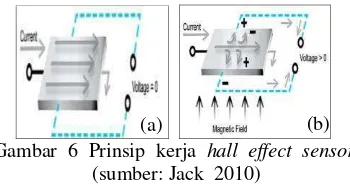
Hall effect sensor merupakan sensor
untuk mendeteksi medan magnet yang terdapat disekitarnya. Effek Hall pertama kali ditemukan oleh Dr. Edwin Hall pada tahun 1879 (Honeywell 2005). Hall effect
sensor akan menghasilkan tegangan yang
proporsional dengan kekuatan medan
magnet yang diterimanya. Sensor hall effect terdiri dari sebuah lapisan silikon dan dua buah elektroda pada masing-masing sisi silikon. Pada saat tanpa ada pengaruh dari medan magnet maka beda potensial antar kedua elektroda tersebut 0 Volt karena arus listrik mengalir ditengah kedua elektroda
sedangkan ketika medan magnet
mempengaruhi sensor ini maka arus yang mengalir akan berbelok mendekati atau menjauhi sisi yang dipengaruhi oleh medan magnet. Hal tersebut menghasilkan beda potensial diantara kedua elektroda dari hall
effect sensor, dimana beda potensial tersebut
sebanding dengan kuat medan magnet yang diterima oleh hall effect sensor ini.
memberikan pengaruh yang berbeda pada sensor ini. Pengaruh dari medan magnet dengan kutub utara baru akan hilang ketika ada pengaruh dari magnet dengan kutub selatan, begitu juga sebaliknya.
Gambar 7 Hall effect sensor tipe ATS 276
Gambar 8 Bentuk rangkaian pada hall effect
latch sensor ATS 276
2.4 Rangkaian Elektronik Penerjemah Arah Gerakan
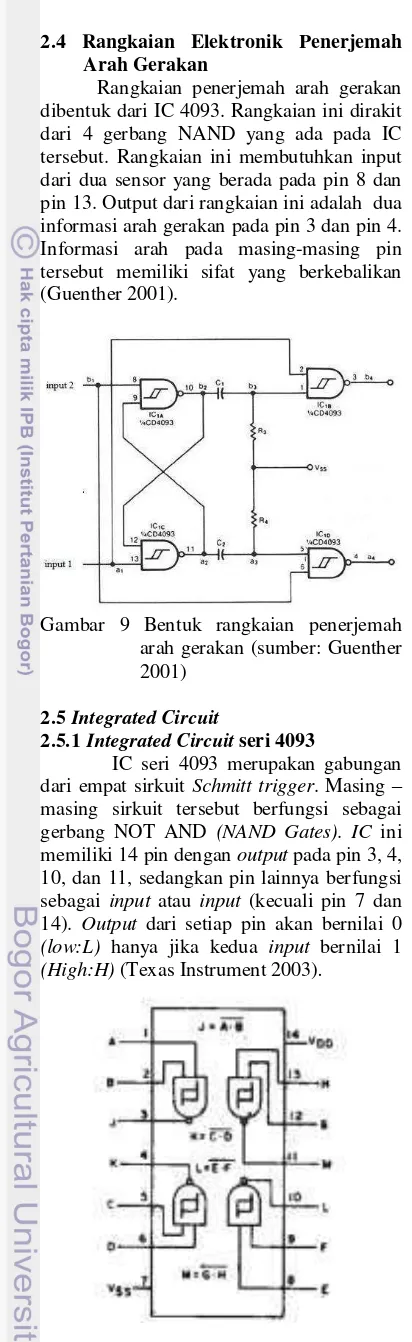
Rangkaian penerjemah arah gerakan dibentuk dari IC 4093. Rangkaian ini dirakit dari 4 gerbang NAND yang ada pada IC tersebut. Rangkaian ini membutuhkan input dari dua sensor yang berada pada pin 8 dan pin 13. Output dari rangkaian ini adalah dua informasi arah gerakan pada pin 3 dan pin 4. Informasi arah pada masing-masing pin tersebut memiliki sifat yang berkebalikan (Guenther 2001).
Gambar 9 Bentuk rangkaian penerjemah arah gerakan (sumber: Guenther 2001)
2.5 Integrated Circuit
2.5.1 Integrated Circuit seri 4093
IC seri 4093 merupakan gabungan dari empat sirkuit Schmitt trigger. Masing –
masing sirkuit tersebut berfungsi sebagai
gerbang NOT AND (NAND Gates). IC ini
memiliki 14 pin dengan output pada pin 3, 4, 10, dan 11, sedangkan pin lainnya berfungsi sebagai input atau input (kecuali pin 7 dan 14). Output dari setiap pin akan bernilai 0
(low:L) hanya jika kedua input bernilai 1
(High:H) (Texas Instrument 2003).
Gambar 10 Functional diagramIC4093
Tabel 2 Truth table untuk NAND gate
2.5.2 Integrated Circuit seri 4069
IC seri 4069 memiliki fungsi sebagai
pembalik arus (inverter). Output yang
dihasilkan memiliki sifat yang berkebalikan dari input. IC ini memiliki 14 pin dengan 6 sirkuit inverter yang terdiri dari 6 pin output
dan 6 pin input. Suplai arus yang
direkomendasikan dalam penggunaan IC ini adalah 3 - 15 volt (Fairchild Semiconductor 1999)
Gambar 11 Connection diagram IC4069
2.5.3 Integrated Circuit seri 4047
IC seri 4047 dapat dimanfaatkan
untuk membentuk rangkaian monostable
positive ataupun negative edge trigger
multivibrator. Pada saat dioperasikan,
rangkaian monostable positive edge trigger
akan menghasilkan sinyal karena adanya transisi dari sinyal rendah ke tinggi,
sedangkan rangkaian monostable negative
edge trigger menghasilkan sinyal pada saat
transisi sinyal tinggi menjadi rendah (National Semiconductor 1993).
2.5.4 Integrated Circuit seri 4066
Gambar 13 Connection diagram IC4066
IC seri 4066 memiliki 14 pin. IC ini dapat berfungsi sebagai saklar. Dalam satu IC ini Terdapat empat sirkuit dengan fungsi seperti saklar . Masing-masing sirkuit terdiri dari input, output dan kontrol.
Tabel 4 Fungsi masing-masing pin pada IC 4066
(Sumber: National Semiconductor 1993)
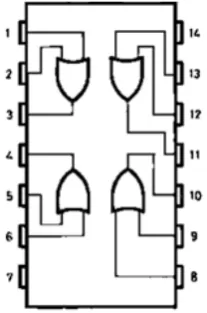
2.5.5 Integrated Circuit seri 4071
IC seri 4071 terdiri dari empat sirkuit
berupa gerbang OR (OR gates). Dari 14 pin
yang ada, output (output) dari IC ini berada pada pin 3, 4, 10, dan 11. Output dari setiap pin akan bernilai 0 (low:L) hanya jika kedua
input bernilai 0, sedangkan kombinasi nilai
input lainnya akan menghasilkan nilai 1
(Philips 1995).
Gambar 14 Connection diagramIC 4071
Tabel 5 Truth table untuk OR gate
III. METODOLOGI
3.1 Waktu dan Tempat Penelitian
Penelitian dilaksanakan dari bulan Februari sampai dengan Agustus 2011 di
Workshop Instrumentasi Meteorologi,
Departemen Geofisika dan Meteorologi,
Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
3.2 Bahan dan Alat
Bahan dan alat yang digunakan pada penelitian ini diantaranya adalah:
Hall effect sensor latch
Switch encoder
Light emitting diode (LED)
catu daya 6 volt
project board
beberapa peralatan pendukung lainnya.
3.3 Metodologi Penelitian
3.3.1 Rancangan Fisik Alat Untuk
.Pengujian Rangkaian Penerjemah
.Arah Gerakan
Pengujian rangkaian penerjemah arah gerakan dilakukan dengan menggunakan alat ukur tinggi muka air sederhana. Alat ukur tinggi muka air terdiri dari dua bagian utama, yaitu bagian fisik dan elektronik (sensor dan rangkaian penerjemah arah gerakan). Bagian penting dari fisik alat
adalah pelampung, pulley, dan sumur
penenang (stilling well). Untuk dapat
mendukung cara kerja sensor, pelampung yang dibuat harus memiliki gaya berat yang lebih kecil dibandingkan dengan gaya dorong keatas oleh air. Gaya dorong oleh air tersebut merupakan gaya penggerak untuk
memutar pulley. Sumur penenang yang
dibuat juga harus bisa menjaga permukaan air dalam keadaan yang relatif tenang dan dapat meredam golakan air dari luar sumur penenang tersebut.
Gambar 15 Rancangan Alat ukur TMA tipe pelampung
Gambar 16 Gaya pada pelampung
U = ρ x g x V (1)
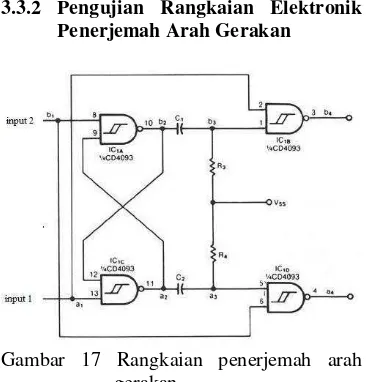
3.3.2 Pengujian Rangkaian Elektronik Penerjemah Arah Gerakan
Gambar 17 Rangkaian penerjemah arah gerakan
Rangkaian elektronik untuk
menerjemahkan arah gerakan pada pulley
akibat perubahan TMA dibentuk dengan menggunakan IC 4093. Rangkaian ini memanfaatkan empat gerbang NAND yang terdapat pada IC 4093. Pin 3 dan 4
gerakan, dimana pin 3 menghasilkan sinyal
sebagai indikator penurunan TMA,
sedangkan pin 4 sebagai indikator
peningkatan TMA. Untuk mengetahui cara kerja dan nilai output dari rangkaian tersebut dilakukan pengujian dengan menggunakan
switch encoder dan hall effect latch sensor
sebagai sensor yang akan memberikan nilai
input bagi rangkaian tersebut.
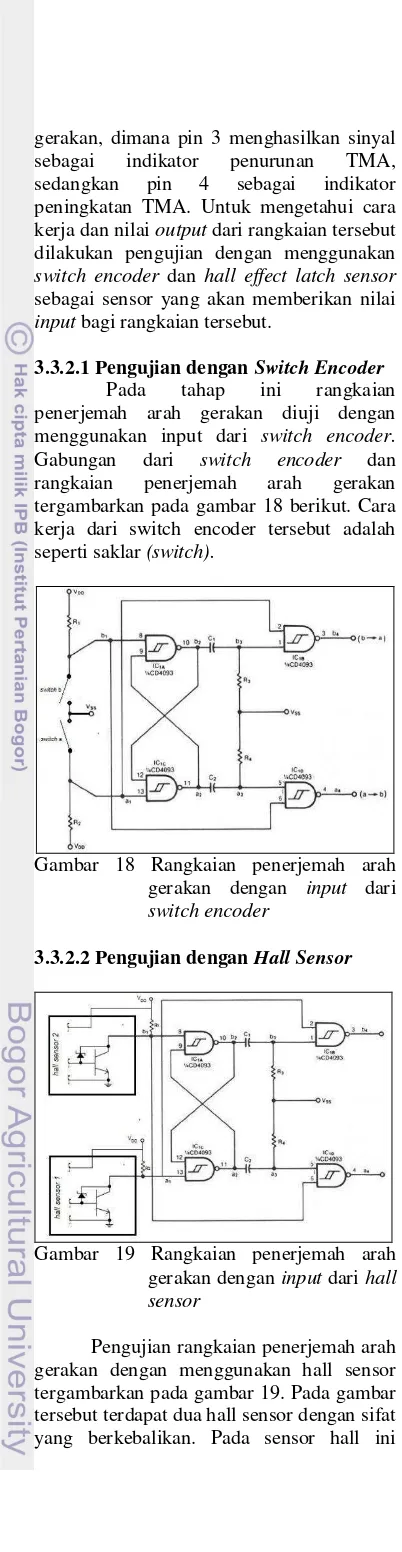
3.3.2.1 Pengujian dengan Switch Encoder
Pada tahap ini rangkaian
penerjemah arah gerakan diuji dengan
menggunakan input dari switch encoder.
Gabungan dari switch encoder dan
rangkaian penerjemah arah gerakan
tergambarkan pada gambar 18 berikut. Cara kerja dari switch encoder tersebut adalah seperti saklar (switch).
Gambar 18 Rangkaian penerjemah arah
gerakan dengan input dari
switch encoder
3.3.2.2 Pengujian dengan Hall Sensor
Gambar 19 Rangkaian penerjemah arah gerakan dengan input dari hall sensor
Pengujian rangkaian penerjemah arah gerakan dengan menggunakan hall sensor tergambarkan pada gambar 19. Pada gambar tersebut terdapat dua hall sensor dengan sifat yang berkebalikan. Pada sensor hall ini
magnet kutub selatan akan memberikan efek yang berkebalikan dibandingkan magnet dengan kutub utara.
3.3.3 Pemanfaatan Rangkaian Penerje
mah .Arah Gerakan Untuk
Pengukuran .Perubahan Tinggi
Muka Air
Agar dapat dimanfaatkan sebagai sensor perubahan TMA, dibutuhkan sensor yang dapat menerjemahkan arah dan
besarnya perubahan posisi pada pulley.
Sensor yang digunakan harus bisa
menghasilkan sinyal yang berbeda untuk gerakan naik dan gerakan turun setelah
melewati rangkaian penerjemah arah
gerakan. Sinyal untuk gerakan naik ataupun turun yang dihasilkan oleh sensor haruslah dikeluarkan pada pin yang berbeda. Setelah dilakukan pengujian dengan menggunakan dua sensor yang berbeda akan diketahui cara kerja dari rangkaian dan sensor yang dapat diaplikasikan dalam pengukuran tinggi muka air.
3.3.3.1 Pengolahan Sinyal Output dari
...Rangkaian Penerjemah Arah
...Gerakan
Sinyal Output dari rangkaian
penerjemah arah gerakan dapat dimodifikasi
terlebih dahulu sebelum dimanfaatkan
sebagai data perubahan TMA. Modifikasi
sinyal output tersebut bertujuan untuk
mengurangi pemakaian catu daya pada saat perekaman data perubahan TMA. Pada
penelitian ini ditambahkan beberapa
rangkaian elektronik yang bertujuan untuk
memodifikasi sinyal output tersebut,
diantaranya adalah rangkaian inverter(IC 4069), rangkaian Analog Switch (IC 4066), rangkaian monostablepositive edge trigger
-negative edge trigger dan gerbang OR
sebagai output terakhir.
3.3.3.2 Resolusi Pengukuran
Gambar 20 Resolusi pengukuran berdasar
Resolusi pengukuran merupakan ukuran terkecil dari perubahan TMA yang dapat terukur. Dengan menggunakan sensor hall, perubahan TMA akan diketahui apabila ada efek yang ditimbulkan oleh kontak antara magnet dan sensor. Kontak antara magnet dan sensor tersebut akan terjadi apabila ada putaran pada pulley. Karena hal tersebut maka resolusi pengukuran akan ditentukan oleh ukuran poros lingkaran yang dililiti tali pada pulley.
3.3.3.3 Visualisasi Output Rangkaian
..Penerjemah Arah Gerakan
Cara kerja rangkaian penerjemah arah gerakan akan lebih mudah dipahami melalui grafik. Pada tahap ini dilakukan simulasi untuk mendapatkan data perubahan arah gerakan. Berdasarkan data yang ada dibuat grafik perubahan tinggi muka air agar cara kerja rangkaian penerjemah arah gerakan lebih tergambarkan.
IV. HASIL DAN PEMBAHASAN
4.1 Rancangan Fisik Alat Untuk
..Pengujian Rangkaian Penerjemah
..Arah Gerakan
Alat yang digunakan untuk menguji rangkaian penerjemah arah gerakan berupa Alat ukur tinggi muka air tipe pelampung
sederhana. Alat tersebut memiliki
komponen fisik yang hampir sama dengan alat lain yang sejenis. Bagian dasar dari fisik alat adalah pelampung, pulley, dan
stilling well. Pelampung dan pulley
merupakan bagian alat yang memiliki
peranan penting dalam memberikan input
pada sensor. Perbedaan utama dengan alat ukur TMA tipe pelampung lainnya adalah adanya penggabungan antara pelampung dengan pemberat, dengan kata lain fungsi pemberat dan pelampung ada pada satu bagian alat yang sama.
4.1.1 Pelampung
Pelampung berfungsi sebagai
pendeteksi perubahan TMA. Perubahan TMA akan menyebabkan posisi pelampung berubah-ubah mengikuti perubahan TMA tersebut. Pada alat yang telah dirancang pelampung juga berperan sebagai bandul pemberat. Ada beberapa hal yang harus diperhatikan dalam pembuatan pelampung,
diantaranya adalah berat jenis dan
ukurannya. Pelampung haruslah memiliki gaya berat yang lebih kecil dibandingkan
gaya dorong keatas oleh air. Syarat untuk terwujudnya hal tersebut diantaranya adalah pelampung memiliki berat jenis yang lebih kecil dibandingkan dengan air. Hal penting lainnya yang harus diperhatikan adalah pelampung harus cukup berat agar bisa berfungsi sebagai bandul pemberat.
Gambar 21 Pelampung dengan beberapa pilihan ukuran
Bentuk pelampung sangatlah
berpengaruh dalam pengukuran TMA. Sebagai pendeteksi perubahan TMA, ukuran
pelampung yang sebaiknya digunakan
adalah pelampung a. Pelampung a memiliki
luas alas yang lebih luas dan tidak terlalu tinggi jika dibandingkan dengan pelampung
b dan c. Dengan luas alas yang lebih luas
pelampung a akan mendapatkan gaya
dorong yang lebih besar dari air ketika terjadi perubahan TMA. Dibandingkan
dengan pelampung lainnya pelampung a
yang lebih pendek dapat mendeteksi perubahan TMA yang lebih rendah ketika
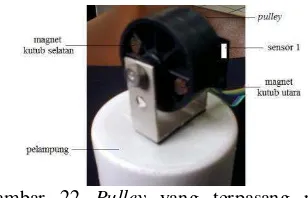
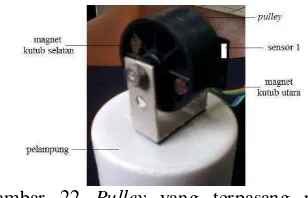
perubahan TMA. Pada alat yang telah dibuat
digunakan pulley dengan ukuran diameter
lingkaran luar 3.5cm dan diameter lingkaran dalam 1cm. Pada pulley tersebut dipasang dua magnet dengan arah kutub yang
berbeda. Perputaran pulley akan
menyebabkan perubahan medan magnet, sehingga memberikan efek yang berbeda terhadap hall effect sensor yang digunakan sebagai sensor gerakan.
Gambar 22 Pulley yang terpasang pada
4.1.3 Sumur Penenang (Stilling Well) Keberadaan sumur penenang pada alat ukur TMA tipe pelampung haruslah terpenuhi. Sesuai dengan namanya sumur penenang berfungsi sebagai pembatas yang dapat mengurangi pergolakan air diluar sumur sehingga air yang berada dalam sumur tersebut dalam kondisi yang relatif tenang. Agar kondisi pelampung didalam sumur penenang tersebut juga relatif stabil, ukuran sumur penenang dibuat dengan ukuran yang sedikit lebih besar daripada ukuran luas alas pelampung. Pada penelitian
ini stilling well yang dibuat dari pipa PVC
memiliki diameter 7.6cm dan tinggi 100 cm
4.2 Pengujian Rangkaian Elektronik
.Penerjemah Arah Gerakan
4.2.1 Pengujian dengan Switch .Encoder
Secara mekanik switch encoder
bekerja seperti saklar, dimana terdapat dua saklar dengan empat variasi kondisi hidup
(on) ataupun mati (off) yang berbeda. Empat kondisi saklar tersebut ditentukan oleh perubahan posisi pada detent. Pada kondisi pertama saklar A maupun B tidak dalam posisi terhubung, sehingga tidak ada sinyal yang dihasilkan. Pada kondisi berikutnya hanya saklar A yang terhubung, maka sinyal
A akan dihasilkan (on) dan menuju
rangkaian penerjemah arah gerakan. Setelah itu saklar B juga akan terhubung seperti saklar A, sehingga dihasilkan dua sinyal. Kemudian penghubung pada saklar A akan lepas dan hanya saklar B yang terhubung sehingga hanya sinyal B yang dihasilkan.
Dengan mengalirkan sinyal yang
dihasilkan oleh switch encoder melewati
rangkaian penerjemah arah gerakan, dapat diketahui kombinasi nilai input yang dibu -
tuhkan untuk dapat diterjemahkan menjadi gerakan naik ataupun turun. Berdasarkan nilai output sinyal sesuai dengan posisi detent pada switch encoder dapat diketahui bahwa gerakan naik dicirikan dengan nilai
output yang berkebalikan dengan gerakan
turun.
Tabel 6 Nilai sinyal output gerakan naik
Tabel 7 Nilai sinyal output gerakan turun
Dengan menggunakan input dari
switch encoder, rangkaian penerjemah arah
gerakan dapat membedakan gerakan naik ataupun turun berdasarkan pola nilai output
yang dihasilkan pada pin 3 dan pin 4. Meskipun dapat menggambarkan pola nilai
output untuk gerakan naik dan turun, namun
secara mekanis switch encoder tidak dapat
dimanfaatkan secara langsung sebagai
sensor perubahan TMA, karena nilai output
berupa sinyal positif yang diharapkan untuk dapat diterjemahkan menjadi gerakan naik seharusnya hanya dihasilkan oleh pin 3, begitu juga sebaliknya dengan sinyal dari gerakan turun yang diharapkan hanya keluar dari pin 4.
4.2.2 Pengujian dengan Hall Sensor
4.2.2.1 Cara Kerja Sensor
Pada diagram alir berikut
digambarkan cara kerja sensor pengukur perubahan TMA dengan menggunakan
sensor Hall. Perubahan TMA akan
menyebabkan perubahan posisi pelampung. Dengan adanya tali yang terpasang pada
pulley, gerakan pelampung mengikuti
perubahan TMA akan memutar pulley.
Dua magnet dengan kutub berbeda yang dipasang secara simetris pada pulley
akan memberikan efek yang berbeda pada sensor hall ketika terjadi perubahan posisi. Perubahan posisi magnet yang ada pada
pulley akibat pergerakan pelampung tersebut
merupakan indikator perubahan TMA yang akan diterima oleh sensor.
Gambar 24 Diagram alir cara kerja sensor
Dengan menggunakan dua hall effect
latch sensor dengan sifat output yang
berkebalikan, untuk gerakan satu arah, salah satu sensor (misal sensor pertama) akan memberikan efek ketika didekati oleh magnet dengan kutub utara dan kemudian akan netral kembali setelah didekati oleh magnet kutub selatan. Untuk gerakan dengan arah berkebalikan, sensor yang kedua akan memberikan efek ketika didekati oleh magnet dengan kutub selatan dan akan netral kembali ketika ada magnet dengan kutub utara.
Gambar 26 Perubahan posisi magnet dan
..nilai output karena putaran
..pada pulley
4.2.2.2 Output Rangkaian Elektronik
.Penerjemah Arah Gerakan
.dengan Input.dari Hall .Sensor
Perbedaan arah gerakan pada pulley
akan memberikan perbedaan nilai input pada
rangkaian penerjemah arah gerakan.
Perbedaan nilai input tersebut akan
diterjemahkan oleh rangkaian penerjemah arah gerakan menjadi output berupa sinyal dengan bentuk yang berbeda antara gerakan searah jarum jam (clock wise: CW) dengan berlawanan arah jarum jam (counter clock
wise: CCW). Nilai output dari rangkaian
penerjemah arah gerakan untuk arah yang berlawanan tersebut tergambarkan pada tabel 8. Dengan asumsi bahwa gerakan searah jarum jam sama dengan kejadian penurunan tinggi muka air, maka sinyal
output yang dihasilkan oleh rangkaian ada
pada pin 3 (pada gate 3), sedangkan sinyal
output untuk kejadian peningkatan tinggi
muka air ada pada pin 4.
Tabel 8 Arah putaran pada pulley dan nilai
output
Dengan menggunakan rangkaian elektronik untuk penerjemah arah gerakan,
arah gerakan TMA akan dapat diketahui. Naik ataupun turunya TMA akan diketahui melalui bentuk pulsa yang dihasilkan oleh rangkaian. Peningkatan TMA bisa diketahui melalui sinyal yang dikeluarkan dari 4,
sedangkan penurunan TMA akan
menghasilkan sinyal pada pin 3.
Gambar 27 Sinyal keluaran untuk gerakan turun (sinyal B pada pin 3)
Gambar 28 Sinyal keluaran untuk gerakan naik (sinyal A pada pin 4)
4.3 Pemanfaatan Rangkaian Penerjemah
.Arah Gerakan Untuk Pengukuran
.Perubahan Tinggi Muka Air
Output dari rangkaian penerjemah
arah juga dapat dimanfaatkan untuk
mengetahui besar perubahan tinggi muka air. Arah gerakan diketahui berdasarkan bentuk pulsa yang dihasilkan, sedangkan besar perubahan TMA diketahui berdasarkan jumlah output pulsa untuk setiap kejadian. Besar perubahan tersebut baru dapat diketahui setelah dilakukan pengolahan lanjut terhadap sinyal output dari rangkaian penerjemah arah gerakan.
4.3.1 Pengolahan Sinyal Output dari
.Rangkaian Penerjemah Arah
.Gerakan
Untuk tujuan mengetahui besar perubahan pada rangkaian penerjemah arah gerakan, menigkatkan jumlah data yang
dapat terukur (storage data) dan
menghemat pemakaian catu daya, sinyal
output dari rangkaian penerjemah arah
gerakan bisa diolah terlebih dahulu. Hal-hal tersebut dapat dilakukan dengan cara
membalikan nilai output menggunakan
rangkaian inverter dan mengurangi lebar
pulsa menggunakan rangkaian monostable
positive-negative edge trigger dengan
4.3.1.1 Aplikasi Rangkaian Inverter dan ..Analog Switch
IC 4069 yang berisikan sirkuit
inverter dapat mengubah nilai output
menjadi nilai yang berkebalikan dengan nilai
inputnya. Dengan menggunakan input dari
rangkaian penerjemah arah gerakan (IC 4093), untuk gerakan naik, output pada pin 3 yang selalu dalam kondisi on akan diubah menjadi kondisi off. Perubahan nilai output
yang selalu dalam kondisi on menjadi kondisi off tersebut dapat menghemat pemakaian catu daya. Catu daya tersebut bisa dimanfaatkan untuk pengukuran disaat terjadinya perubahan TMA.
4.3.1.2 Aplikasi Rangkaian Monostable
..Positive dan Negative Edge
..Trigger.dan Gerbang OR
Pemanfaatan rangkaian monostable
positive edge trigger dan negative edge
trig-ger bertujuan untuk mengurangi periode
atau lebar pulsa (pulse width) yang
dihasilkan dari rangkaian penerjemah arah gerakan.Pengurangan lebar pulsa tersebut dapat mengurangi pemakaian catu daya ketika ada sinyal yang dihasilkan. Pada saat dioperasikan, rangkaian monostablepositive
edge trigger akan menghasilkan sinyal
ketika terjadi transisi dari sinyal rendah ke
tinggi, sedangkan rangkaian monostable
negative edge trigger menghasilkan sinyal
pada saat transisi sinyal tinggi menjadi rendah. Kombinasi nilai kapasitor dan resistor akan menentukan lebar pulsa yang
dihasilkan oleh rangkaian monostable
positive dan negative edge trigger. Pada
penelitian ini digunakan, rangkaian
monostable yang dibuat menggunakan
resistor 10Ω dan kapasitor 1nF dengan periode <1s
Gambar 29 Perubahan bentuk sinyal setelah melewati rangkaian inverter
Rangkaian terakhir yang digunakan
adalah gerbang OR. Dengan
menggabungkan output dari rangkaian
monostable positive dan negative edge
trigger menggunakan gerbang OR, satu
pulsa yang menggambarkan suatu kejadian (1 sinyal untuk 1 putaran penuh pada pulley) dapat diterjemahkan menjadi dua informasi, yaitu menjadi sinyal awal dan akhir kejadian. Setelah melewati gerbang OR,
untuk setengah putaran pada pulley akan
dihasilakan dua sinyal. Untuk gerakan satu arah, sinyal akhir dari suatu kejadian merupakan sinyal awal untuk kejadian berikutnya.
4.3.2 Resolusi Pengukuran
Gambar 31 Lingkaran dalam dan luar pada
pulley
Perubahan TMA akan menyebabkan
perputaran pulley. Pemasangan tali pada
pulley yang terhubung dengan pelampung
dapat dilakukan pada lingkaran dalam (besar) ataupun lingkaran luar (kecil) pulley. Sinyal perubahan TMA setelah melewati rangkain gerbang OR akan dihasilkan setiap setengah keliling gerakan pada lingkaran dalam ataupun lingkaran luar
pada pulley. Resolusi pengukuran yang
merupakan jarak terkecil yang dapat terukur oleh sensor adalah jarak setengah keliling lingkaran tersebut.
Ukuran diameter lingkaran yang digunakan untuk melilitkan tali berbanding terbalik dengan resolusi yang didapatkan. Diameter lingkaran bagian dalam yang lebih
kecil dibandingkan dengan diameter
lingkaran bagian luar akan memberikan
resolusi yang lebih tinggi. Resolusi
pengukuran dengan menggunakan lingkaran bagian dalam dengan diameter 1 cm adalah 1.57 cm. Ketika ada peningkatan tinggi muka air yang kurang dari 1.57cm dan kemudian terjadi penurunan tinggi muka air, maka kejadian peninngkatan TMA tersebut tidak dapat terekam oleh sensor. Ukuran resolusi ketika menggunakan lingkaran bagian dalam tersebut adalah resolusi terbaik yang bisa dihasilkan oleh sensor dengan menggunakan pulley tersebut.
Dengan rancangan fisik alat yang telah dibuat, resolusi pengukuran yang dihasilkan dengan menggunakan hall effect
sensor sebagai sensor perubahan TMA
sudah cukup bagus. Sensor ini dapat digunakan untuk pengukuran TMA pada aliran air dengan perubahan TMA yang lebih besar dari resolusi alat, seperti pada aliran sungai yang kecil dengan perubahan TMA yang cenderung besar. Sensor ini kurang tepat jika digunakan pada aliran air dengan dinamika perubahan TMA yang relatif kecil seperti pada sungai yang lebar dengan perubahan TMA yang relatif kecil dan diluar resolusi sensor. Apabila digunakan dalam estimasi debit, data TMA yang didapat dari sensor ini memiliki resiko kesalahan yang cukup besar
4.3.3 Visualisasi Output Rangkaian
..Penerjemah Arah Gerakan
Data perubahan tinggi muka air ini dapat menggambarkan cara kerja rangkaian penerjemah arah gerakan dan sensor gerakan yang digunakan. Setiap ada perubahan tinggi muka air, maka tinggi muka air akan
berkurang (decrement) ataupun bertambah
(increment) sebesar resolusi terkecil yang
mampu diukur oleh sensor, yaitu ±0.055m (lilitan tali pada lingkaran luar pulley,
resolusi rendah).
Dilihat dari titik-titik pengukuran dengan selang yang tidak tetap diketahui bahwa sensor yang dibuat hanya akan melakukan pengukuran pada saat terjadi perubahan tinggi muka air saja, sehingga pemakaian catu daya ketika pengiriman sinyal output dari rangkaian akan lebih hemat tanpa mengurangi kemampuan sensor untuk mengamati perubahan tinggi muka air secara detail. Cara kerja alat yang hanya
mengukur pada waktu tertentu saja
memungkinkan alat untuk dapat dipakai dalam jangka waktu yang lama karena pemakaian catu daya yang lebih sedikit dibandingkan dengan alat yang mengukur secara terus menerus.
V. SIMPULAN DAN SARAN
5.1 SIMPULAN
Dengan menggunakan hall effect
sensor sebagai sensor yang memberikan
input bagi rangkaian penerjemah arah gerakan, rangkaian penerjemah arah gerakan yang dibentuk dari IC 4093 tersebut dapat
dimanfaatkan untuk membedakan arah gerakan.
Rangkaian penerjemah arah gerakan dengan input dari hall effect sensor dapat dimanfaatkan untuk pengukuran perubahan tinggi muka air. Untuk tujuan tersebut terlebih dahulu ditambahkan rangkaian
rangkaian inverter serta rangkaian
monostable positive-negative edge trigger
dengan output terakhir pada gerbang OR. Rangkaian tersebut hanya akan mengukur pada saat ada perubahan tinggi muka air.
Penambahan rangkaian tersebut akan
menghemat pemakaian catu daya. Setelah melewati gerbang OR, untuk setengah putaran pada pulley akan dihasilkan dua sinyal perubahan arah gerakan (searah).
Pulley berdiameter 1cm akan
memberikan resolusi pengukuran sebesar 1.57cm. Dengan ukuran resolusi tersebut, alat ukur TMA dengan menggunakan sensor ini tidaklah cocok digunakan untuk semua kondisi aliran air. Dengan menggunakan perangkat fisik alat yang telah dibuat, sensor ini dapat digunakan untuk pengukuran TMA pada aliran air dengan perubahan TMA yang lebih besar dari resolusi alat seperti pada aliran sungai yang kecil dengan perubahan TMA yang cenderung besar. Sensor ini kurang tepat jika digunakan pada aliran air dengan dinamika perubahan TMA yang kecil seperti pada sungai lebar.
5.2 SARAN
Resolusi pengukuran yang didapat
dengan menggunakan Hall effect latch
sensor masih tergolong rendah. Untuk
dilakukan beberapa cara, diantaranya adalah penerapan prinsip gear ratio. Pada penelitian yang telah dilakukan, sinyal perubahan tinggi muka air baru akan dihasilkan setelah ada putaran yang relatif jauh pada pulley. Dengan menerapkan prinsip gear ratio, jarak
putaran yang pendek pada pulley dapat
dikonversi menjadi putaran yang lebih jauh,
sehingga dapat memberikan resolusi
pengukuran yang lebih baik. penambahan jumlah magnet dan pengaturan posisinya
pada pulley juga memungkinkan untuk
meningkatkan resolusi pengukuran.
DAFTAR PUSTAKA
Anachip Corp. 2004. Complementary
Output Hall Effect Latch-ATS
276/277. http://www.datasheet4u.net/
datasheet/A/T/S/ATS276_ETC.pdf.htm l [13 Juni 2011]
Asdak. 1995. Hidrologi dan Pengelolaan Daerah Aliran Sungai. Gadjah Mada University Press. Yogyakarta.
BPPT. 2011. Data Tahunan Debit Sungai. http://www.kelair.bppt.go.id/~jsisda/De - bit/yearbook.html [6 April 2011]
Guenther H. 2011. The Tools and
Technology being used to study the Bats at the Neda Mine Hibernaculum, Neda Wisconsin..http://www.seii.com/
bats/tools/default.htm [21 April 2011]
Honeywell. 2005. Chapter 2 Hall Effect Sensors.http://content.honeywell.com/s ensing/prodinfo/solidstate/technical/cha pter2.pdf. [25 Februari 2011]
Jack M. 2010. Hall-Effect Sensors. (EN971312R 04). http://dgkaihua.en. made-in-china.com/product/JMrnyqIK hoVT/China-Encoder-Switches-EN971 312R-04-.html [24 Juni 2011]
National Semoconductor. 1993. CD4047 MONOSTABLE/ASTABLE MULTI VIBRATOR.http://pdf1.alldatasheet.co m/datasheet.pdf/view/80421/NSC/CD4 047BM/+504_3UKPC/1D.t9YwHT+/d atasheet.pdf [27 Juli 2011 ]
Panasonic. 2010. 10mm Square GS
Encoders. http://industrial.panasonic
com/ [8 Juni 2011]
Philips. 1995. HEF4071B Gates: Quadruple
2-input OR Gate. http://www.datasheet
catalog.com/datasheets_pdf/H/E/F/4/ H EF4071.shtml [25 April 2011]
Rickly Hidrological Company. 2009. Float Type Instruments. http://www.rickly.co m/sm / FloatType/WaterLevelRecorder s.htm [21 Februari 2011]
Stanley M. 2008. BTC M850 Optical Mouse
Teardown.http://www.eehomepagecom
/report.php?report=20080214 [12 Mei
2011]
Tanujaya. 2010. Resistor/ Tahanan. http://ta nujaya.webs.com/elecronic.component s .htm. [24 Juni 2011]
Texas Instrument. 2003. CD4047
Types-CMOSLow-Power Monostable/Astable
Multivibrator.http://www.alldatasheet.c om/datasheet-Pdf/pdf/26874/TI/ CD40 47.html. [2 Maret 2011]
Texas Instrument. 2003. CD4093 Types-CMOS Quad 2 Inpunt NAND Schmitt Triggers. http://www.alldatasheet.com/ datasheet-pdf/pdf/26897/TI/ CD4093. html. [30 Mei 2011]
Triesnawati H. 2006. AWLR (Automatic
Water Level Recording) Basis
PENGUJIAN RANGKAIAN ROTARY ENCODER MENGGUNAKAN
HALL EFFECT SENSOR UNTUK MENGUKUR
PERUBAHAN TINGGI MUKA AIR
ANRIA
DEPARTEMEN GEOFISIKA DAN METEOROLOGI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
ABSTRACT
ANRIA. Rotary Encoder Series Testing by Using Hall Effect Sensor to Measure Water Level
Change. Supervised by Prof. Dr. Ir Hidayat Pawitan and Ir. Bregas Budianto, Ass. Dpl
One of hydrology parameter is water level. Water level could describe characteristic of a watershed. The change of waterlevel can be measured by using water level floating type recorder. This tool works by measuring the direction and distance of movement through the rotation of pulley which rotated because of the waterlevel change. Commonly, that tool built with movement sensor and movement (rotary) encoder series. Rotary encoder series can be built by using IC (integrated circuit) 4093. By using hall effect sensor as movement sensor which is give input to rotary encoder series, water level change can be measured. Output signal from rotary encoder series have to process to get distance of water level change. Inverter series and monostable positive - negative edge trigger series with OR gates circuit as lattest output are aplide on that process. On this research, a half rotation on pulley produce a movement signal. Distance of that movement depend on pulley size. By using the 1cm diameter pulley, the resolution is about 1,57cm.
ABSTRAK
ANRIA. Pengujian Rangkaian Rotary Encoder Menggunakan Hall Effect Sensor Untuk
Mengukur Perubahan Tinggi Muka Air. Dibimbing oleh Prof.Dr. Ir Hidayat Pawitan dan Ir. Bregas Budianto, Ass. Dpl
Tinggi muka air merupakan salah satu parameter hidrologi. Tinggi muka air dapat menggambarkan karakteristik suatu daerah aliran sungai. Perubahan tinggi muka air dapat diukur dengan menggunakan alat ukur tinggi muka air tipe pelampung. Cara kerja dari alat tipe ini adalah
dengan mengukur arah dan besar perubahan berdasarkan pergerakan pulley yang berputar karena
adanya perubahan tinggi muka air. Pada alat tersebut umumnya terdapat sensor gerakan dan rangkaian penerjemah arah gerakan. Rangkaian penerjemah gerakan dapat dibentuk dari IC
(integrated circuit) seri 4093. Dengan menggunakan hall effect latch sensor sebagai sensor
gerakan yang memberikan input bagi rangkaian penerjemah arah gerakan, perubahan tinggi muka air dapat diketahui. Untuk dapat mengetahui besar perubahan tinggi muka air perlu dilakukan pengolahan terhadap sinyal output dari rangkaian penerjemah arah gerakan. Pengolahan sinyal
tersebut dilakukan dengan menambahkan rangkaian inverter serta rangkaian monostable positive -
negative edge trigger dengan output terakhir pada sirkuit dengan gerbang OR. Pada penelitian ini,
untuk setengah putaran pada pulley dihasilkan satu sinyal yang menandakan gerakan naik ataupun
turun. Besar gerakan tersebut dipengaruhi oleh ukuran pulley, Dengan menggunakan pulley
bediameter 1cm didapatkan resolusi sebesar 1.57cm.
I. PENDAHULUAN
1.1 Latar Belakang
Sungai merupakan salah satu sumber air tawar yang penting keberadaannya bagi makhluk hidup di sekitarnya. Perusahaan Daerah Air Minum (PDAM) pada umumnya memanfaatkan air dari suatu sungai untuk memenuhi kebutuhan konsumennya. Pada beberapa tempat di indonesia, keberadaan sungai terkadang menjadi suatu ancaman, yaitu pada saat debit air yang mengalir melebihi kondisi normal, atau yang lebih dikenal dengan sebutan banjir. Karena pentingnya keberadaan sungai tersebut, kajian mengenai sungai ataupun daerah aliran sungai (DAS) sangatlah penting dan dibutuhkan demi menjamin ketersediaan air yang berkelanjutan dan terkendali.
Salah satu parameter hidrologi yang berkaitan dengan sungai adalah tinggi muka air (water level) sungai. Banyak hal yang bisa dicermati dengan mengetahui tinggi muka air (TMA) suatu aliran, diantaranya adalah debit aliran dan sistem aliran sungai. Kajian lebih lanjut mengenai TMA dan parameter hidrologi lainnya yang berkaitan dapat menggambarkan karakteristik suatu DAS. Pemahaman terhadap karakteristik suatu DAS akan sangat membantu dalam pengelolaan DAS maupun hal-hal lain yang berkaitan dengan DAS tersebut.
Ketersediaan alat ukur merupakan hal mendasar yang harus terpenuhi untuk ketersediaan data, termasuk data TMA. Data TMA bisa didapatkan melalui berbagai teknik pengukuran, baik itu manual ataupun
otomatis. Pengukuran TMA dengan
menggunakan alat ukur otomatis yang dapat merekam data secara kontinu merupakan salah satu pilihan dalam pengambilan data TMA yang berkelanjutan. Saat ini telah
dikembangkan berbagai macam alat
pengukuran TMA, diantaranya adalah alat ukur bertipe pelampung.
Alat ukur TMA bertipe pelampung dapat menggunakan berbagai jenis sensor, satu diantaranya adalah potensiometer. Sama dengan sensor yang lainnya, pada dasarnya sensor tersebut menerjemahkan arah dan perubahan tinggi muka air
berdasarkan gerakan pada pulley. Pada
penelitian terdahulu yang dilakukan oleh
Triesnawati (2006), potensiometer
digunakan sebagai sensor perubahan tinggi muka air. Alat ukur TMA dengan sensor tersebut memiliki beberapa keterbatasan,
diantaranya adalah rentang pengukuran yang terbatas.
Alat ukur tinggi muka air otomatis pada umumnya terdiri dari dua bagian
penting, yaitu bagian mekanik dan
elektronik. Kedua bagian tersebut memiliki peran yang sama pentingnya. Suatu alat pengukuran tinggi muka air akan dapat bekerja dengan baik apabila kedua bagian tersebut bekerja sesuai fungsinya. Pada penelitian ini akan dilakukan pengujian terhadap rangkaian elektronik penerjemah
arah gerakan dengan menggunakan hall
effect sensor sebagai sensor yang
memberikan input bagi rangkaian tersebut. Rangkaian tersebut akan menerjemahkan gerakan pada pulley.
1.2 Tujuan
Penelitian ini bertujuan untuk
menguji rangkaian penerjemah rotasi
(rotary encoder) yang akan digunakanuntuk
mengukur perubahan tinggi muka air dengan
menggunakan hall sensor.
II. TINJAUAN PUSTAKA
2.1 Tinggi Muka Air (Water Level)
Tinggi muka air (TMA) merupakan salah satu parameter hidrologi pada sungai. TMA merupakan tinggi permukaan air yang diukur dari titik tertentu yang telah ditetapkan. Dalam kaitannya dengan debit aliran (Q), data TMA dapat digunakan untuk mengetahui luas penampang melintang suatu aliran (A) seperti yang tergambarkan pada
gambar 1. Dengan mengetahui luas
penampang melintang dan kecepatan aliran, akan dapat diketahui debit aliran dengan
menggunakan persamaan Bernoulli (the
continuity equation):Q = A . V
Gambar 1 Penampang melintang sungai
I. PENDAHULUAN
1.1 Latar Belakang
Sungai merupakan salah satu sumber air tawar yang penting keberadaannya bagi makhluk hidup di sekitarnya. Perusahaan Daerah Air Minum (PDAM) pada umumnya memanfaatkan air dari suatu sungai untuk memenuhi kebutuhan konsumennya. Pada beberapa tempat di indonesia, keberadaan sungai terkadang menjadi suatu ancaman, yaitu pada saat debit air yang mengalir melebihi kondisi normal, atau yang lebih dikenal dengan sebutan banjir. Karena pentingnya keberadaan sungai tersebut, kajian mengenai sungai ataupun daerah aliran sungai (DAS) sangatlah penting dan dibutuhkan demi menjamin ketersediaan air yang berkelanjutan dan terkendali.
Salah satu parameter hidrologi yang berkaitan dengan sungai adalah tinggi muka air (water level) sungai. Banyak hal yang bisa dicermati dengan mengetahui tinggi muka air (TMA) suatu aliran, diantaranya adalah debit aliran dan sistem aliran sungai. Kajian lebih lanjut mengenai TMA dan parameter hidrologi lainnya yang berkaitan dapat menggambarkan karakteristik suatu DAS. Pemahaman terhadap karakteristik suatu DAS akan sangat membantu dalam pengelolaan DAS maupun hal-hal lain yang berkaitan dengan DAS tersebut.
Ketersediaan alat ukur merupakan hal mendasar yang harus terpenuhi untuk ketersediaan data, termasuk data TMA. Data TMA bisa didapatkan melalui berbagai teknik pengukuran, baik itu manual ataupun
otomatis. Pengukuran TMA dengan
menggunakan alat ukur otomatis yang dapat merekam data secara kontinu merupakan salah satu pilihan dalam pengambilan data TMA yang berkelanjutan. Saat ini telah
dikembangkan berbagai macam alat
pengukuran TMA, diantaranya adalah alat ukur bertipe pelampung.
Alat ukur TMA bertipe pelampung dapat menggunakan berbagai jenis sensor, satu diantaranya adalah potensiometer. Sama dengan sensor yang lainnya, pada dasarnya sensor tersebut menerjemahkan arah dan perubahan tinggi muka air
berdasarkan gerakan pada pulley. Pada
penelitian terdahulu yang dilakukan oleh
Triesnawati (2006), potensiometer
digunakan sebagai sensor perubahan tinggi muka air. Alat ukur TMA dengan sensor tersebut memiliki beberapa keterbatasan,
diantaranya adalah rentang pengukuran yang terbatas.
Alat ukur tinggi muka air otomatis pada umumnya terdiri dari dua bagian
penting, yaitu bagian mekanik dan
elektronik. Kedua bagian tersebut memiliki peran yang sama pentingnya. Suatu alat pengukuran tinggi muka air akan dapat bekerja dengan baik apabila kedua bagian tersebut bekerja sesuai fungsinya. Pada penelitian ini akan dilakukan pengujian terhadap rangkaian elektronik penerjemah
arah gerakan dengan menggunakan hall
effect sensor sebagai sensor yang
memberikan input bagi rangkaian tersebut. Rangkaian tersebut akan menerjemahkan gerakan pada pulley.
1.2 Tujuan
Penelitian ini bertujuan untuk
menguji rangkaian penerjemah rotasi
(rotary encoder) yang akan digunakanuntuk
mengukur perubahan tinggi muka air dengan
menggunakan hall sensor.
II. TINJAUAN PUSTAKA
2.1 Tinggi Muka Air (Water Level)
Tinggi muka air (TMA) merupakan salah satu parameter hidrologi pada sungai. TMA merupakan tinggi permukaan air yang diukur dari titik tertentu yang telah ditetapkan. Dalam kaitannya dengan debit aliran (Q), data TMA dapat digunakan untuk mengetahui luas penampang melintang suatu aliran (A) seperti yang tergambarkan pada
gambar 1. Dengan mengetahui luas
penampang melintang dan kecepatan aliran, akan dapat diketahui debit aliran dengan
menggunakan persamaan Bernoulli (the
continuity equation):Q = A . V
Gambar 1 Penampang melintang sungai
Menurut Asdak (1995), untuk aliran sungai tertentu, data TMA dapat langsung digunakan untuk menduga debit aliran. Debit sungai yang diduga melalui data TMA
tersebut merupakan suatu pendekatan
berdasarkan kurva hubungan debit aliran dan
TMA (stage discharge rating curve), untuk
itu dibutuhkan data TMA dan debit dalam jumlah banyak (tahunan). Hubungan antara debit aliran dan TMA tersebut dapat dilihat pada gambar berikut ini.
Gambar 2 Stage discharge rating curve
(sumber: http://www.corpsned ma nuals.us/)
Data TMA memiliki banyak
kegunaan. Untuk perencanaan bangunan yang berkaitan dengan perubahan TMA, seperti jembatan, bendungan, dan sistem irigasi, data TMA sangatlah dibutuhkan. Terkait dengan bencana banjir pada daerah hilir sungai, data TMA dapat dimanfaatkan sebagai indikator bagi kejadian banjir.
2.2 Alat Ukur Tinggi Muka Air Tipe
..Pelampung
Alat ukur tinggi muka air tipe pelampung merupakan salah satu alat ukur TMA. Pada alat ukur ini, perubahan TMA ditandai dengan pergerakan naik ataupun turun dari pelampung tersebut. Besar perubahan tinggi muka air akan diketahui
berdasarkan gerakan pada pulley yang akan
berputar ketika ada gerakan pada
pelampung. Benda yang akan digunakan sebagai pelampung haruslah mendapatkan gaya tekanan ke atas (Fa) yang lebih besar
dibadingkan gaya berat (w) benda itu
sendiri.
Alat ukur TMA tipe pelampung yang sebelumnya pernah dikembangkan, seperti pada gambar 3, memiliki pemberat dan
pelampung terpisah. Pelampung dan
pemberat tersebut terikat di tiap ujung tali
yang terpasang pada pulley. Pemberat
berfungsi sebagai pengimbang agar
pelampung tetap mengambang pada
permukaan air, sedangkan pelampung
sebagai pendeteksi naik turunnya permukaan air.
Gambar 3 AWLR float type dengan
..pelampung dan pemberat yang
..terpisah (sumber: rickly.com)
Pada dasarnya alat ukur TMA tipe pelampung memiliki prinsip kerja yang sama. Arah dan besar perubahan diketahui berdasarkan putaran pada pulley. Arah dan
besar perubahan tersebut merupakan input
bagi sensor untuk kemudian diterjemahkan menjadi sebuah informasi.
2.3 Sensor Gerakan
Peubahan atau gerakan dapat
dideteksi dengan menggunakan sensor. Sensor yang dapat dimanfaatkan untuk mendeteksi gerakan diantaranya adalah
potensiometer, switch encoder dan hall
effect sensor.
2.3.1 Potensiometer
Gambar 4 Potensiometer (sumber: Tanujaya
2010) (a)
Potensiometer merupakan salah satu jenis resistor. Potensiometer seperti yang terlihat pada gambar 4 merupakan variabel
resistor, yaitu resistor yang nilai
hambatannya dapat diubah dengan cara
memutar poros yang terdapat pada
potensiometer. Dalam pemanfaatannya
sebagai sensor gerakan (perubahan) TMA,
pergerakan pada pulley akan turut
menggerakan poros yang ada pada
potensiometer. Perubahan nilai hambatan akibat berputarnya poros tersebut merupakan
output dari potensiometer yang kemudian
diterjemahkan sebagai bentuk perubahan TMA (Triesnawati 2006).
2.3.2 Switch Encoder
Switch encoder merupakan
komponen elektronik yang memiliki cara kerja seperti saklar (switch). Dari segi fisik, alat ini memiliki ukuran yang kecil dengan tiga kaki (pin) dan poros rotasi pada bagian atas alat. Pada alat ini terdapat 24 detent
dengan dua output pulsa (fase A dan B) yang
berurutan untuk tiap dua detent yang
dilewati akibat adanya perputaran pada poros. Untuk satu putaran penuh (3600) pada
switch encoder, masing masing pulsa akan
muncul sebanyak 12 kali (Panasonic 2010).
Gambar 5 Switch encoder (sumber: http://
..dgkaihua.en.made-in-china.com/
..dan www.eehomepage.com/)
Tabel 1 Karakteristik switch encoder
M
2.3.3 Hall Effect Sensor
Hall effect sensor merupakan sensor
untuk mendeteksi medan magnet yang terdapat disekitarnya. Effek Hall pertama kali ditemukan oleh Dr. Edwin Hall pada tahun 1879 (Honeywell 2005). Hall effect
sensor akan menghasilkan tegangan yang
proporsional dengan kekuatan medan
magnet yang diterimanya. Sensor hall effect terdiri dari sebuah lapisan silikon dan dua buah elektroda pada masing-masing sisi silikon. Pada saat tanpa ada pengaruh dari medan magnet maka beda potensial antar kedua elektroda tersebut 0 Volt karena arus listrik mengalir ditengah kedua elektroda
sedangkan ketika medan magnet
mempengaruhi sensor ini maka arus yang mengalir akan berbelok mendekati atau menjauhi sisi yang dipengaruhi oleh medan magnet. Hal tersebut menghasilkan beda potensial diantara kedua elektroda dari hall
effect sensor, dimana beda potensial tersebut
sebanding dengan kuat medan magnet yang diterima oleh hall effect sensor ini.
memberikan pengaruh yang berbeda pada sensor ini. Pengaruh dari medan magnet dengan kutub utara baru akan hilang ketika ada pengaruh dari magnet dengan kutub selatan, begitu juga sebaliknya.
Gambar 7 Hall effect sensor tipe ATS 276
Gambar 8 Bentuk rangkaian pada hall effect
latch sensor ATS 276