PERANCANGAN ALAT PENGAMAN KENDARAAN
BERMOTOR RODA DUA MENGGUNAKAN RFID DAN
PEMBACAAN LETAK KENDARAAN MENGGUNAKAN GPS
BERBASIS MIKROKONTROLER
Diajukan dalam rangka memenuhi salah satu syarat untuk menyelesaikan Program Studi Strata-1di Program Studi Teknik Elektro
Oleh:
Rayanti Ramadhian 13109016
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA BANDUNG
vii
1.2 Identifikasi Masalah ... 2
1.3Rumusan Masalah ... 2
2.1.1 Mikrokontroler ATmega128 ... 6
2.1.2 Mikrokontroler ATmega32 ... 7
2. 2Radio Frequency Identification (RFID) ... 9
2.2.1 Frekuensi Radio RFID ... 10
2.2.2 Konfigurasi Pin dan Spesifikasi ID-12 ... 11
2.2.3 Tingkat Akurasi Sistem RFID ... 12
2. 3Global Position System (GPS) ... 13
2.3.1 Spesifikasi GPS Modul EM-406 ... 14
viii
2. 4Modul GSM SIM900 ... ..19
2. 5 Handpone (HP) ... 20
2. 6 Relay ... 23
2. 7 Sistem Pelistrikan Motor... 24
2. 8 Catu Daya... 25
BAB III PEMILIHAN KOMPONEN DAN PERANCANGAN ... 35
3.1 Pemilihan Komponen... 35
3.1.1 Mikrokontroler ... 35
3.1.2 Radio Frequency Identification (RFID) ... 36
3.1.3 Global Position System (GPS) ... 37
3.1.4 Modul GSM SIM900 ... 37
3.2 Perancangan ... 38
3.2.1 Gambaran Umum ... 38
3.2.2 Perancangan Perangkat Keras ... 40
3.2.2.1 Rangkaian ATmega128 dan Rangkaian ATmega32... 41
3.2.2.1 Rangkaian Relay ... 42
3.2.3 Perancangan Perangkat Lunak ... 42
BAB IV PENGUJIAN DAN ANALISIS ... 45
4.1 Pengujian Dan Analisis ... 45
4.1.1 Pengujian RFID Reader ... 45
4.1.2 Pengujian Modul GPS ... 47
4.1.3 Pengujian Modul GSM ... 51
ix
4.1.5 Buzzer ... 53
4.2 Analisis Alat Keseluuhan ... 54
BAB V PENUTUP ... 59
5.1 Kesimpulan ... 59
5.2 Saran ... 60
x DAFTAR GAMBAR
Halaman
Gambar 2.1 Spesifikasi pin Mikrokontroler Atmega128... 7
Gambar 2.2 Diagram Pin Mikrokontroler Atmega32 ... 9
Gambar 2.3 Cara kerja sistem RFID ... 10
Gambar 2.4 RFID ID-12 dan Spesifikasi pin ID12 ... 12
Gambar 2.5 Modul GPS EM-406a ... 15
Gambar 2.6 Spesifikasi Pin modul GPS EM-406a ... 15
Gambar 2.7 Parsing data GPS menggunakan software CodeVisionAVR ... 17
Gambar 2.8 Parsing data GPS untuk kalender ... 18
Gambar 2.9 Parsing data GPS untuk waktu ... 18
Gambar 2.10 Parsing data GPS menampilkan latitude dan longitude ... 19
Gambar 2.11 Modul GSM SIM900 ... 20
Gambar 2.12 Spesifikasi pin SIM900 ... 20
Gambar 2.13 Relay 5 kaki ... 23
Gambar 2.20 Pencarian alamat menggunakan kode Longitude dan Latitude... 29
Gambar 2.21 Contoh hasil pencarian menggunakan google map. ... 29
Gambar 2.22 Tampilan aplikasi Google Maps bila akan di install. ... 33
Gambar 2.23 Layar pembuka setelah menginstal. ... 34
Gambar 2.24 Tampilan saat akan menjalankan Google Maps. ... 34
Gambar 3.1 Blok Diagram Perancangan Alat Pengaman Kendaraan. ... 39
Gambar 3.2 Rangkaian Relay. ... 42
Gambar 3.3 Diagram alir menyalakan kendaraan bermotor. ... 43
Gambar 3.4 Diagram alir mengganti nomor HP dan password. ... 44
xi
Gambar 4.2 RFID mendeteksi TAG ID. ... 46
Gambar 4.3 SMS masuk pembacaan RFID. ... 46
Gambar 4.4 Hasil ukur saat TAG ID terdeteksi dan mesin motor hidup... 46
Gambar 4.5 Hasil ukur saat tidak adaTAG ID yang terdeteksi dan mesin motor mati. ... 47
Gambar 4.6 Data asli GPS. ... 49
Gambar 4.7 Tampilan sinyal tunggu GPS. ... 50
Gambar 4.8 Tampilan hasil bacaan GPS modul. ... 50
Gambar 4.9 Tampilan pada Google Map HP. ... 50
Gambar 4.10 Mencari keberadaan kendaraan menggunakan Google Map. ... 52
Gambar 4.11 Cek modul GSM. ... 53
Gambar 4.12 Tes pengiriman SMS... 53
Gambar 4.13 Cek pulsa modul GSM. ... 54
Gambar 4.14 Program pengiriman data GPS ke HP ... 54
Gambar 4.15 Tampilan SMS saat RFID reader mendeteksi TAG ID yang bukan milik pemilik kendaraan dan hasil pembacaan GPS. ... 54
Gambar 4.16 Hasil ukur saat TAG ID terdeteksi... 56
Gambar 4.17 Hasil ukur saat standby dan mesin motor mati.. ... 57
xii DAFTAR TABEL
Halaman
Tabel 2.1 Spesifikaasi RFID ID-12... 12
Tabel 2.2 Spesifikasi modul GPS EM-406a ... 14
Tabel 3.1 Perbandingan Mikrokontroler ATmega128, ATmega8, ATmega16 dan ATmega32 ... 35
Tabel 3.2 Perbandingan antara RFID ID 2, ID12 dan ID20 ... 36
Tabel 3.3 Tabel Perbandingan Modul GPS ... 37
Tabel 3.4 Tabel Perbandingan Modul GSM ... 36
Tabel 3.5 Penggunaan Port Atmega128 ... 41
Tabel 3.6 Penggunaan Port Atmega32 ... 41
Tabel 4.1 Pengujian jarak baca RFID reader terhadap TAG ID ... 47
Tabel 4.2 Tabel analisa GPS ... 51
xiii DAFTAR PUSTAKA
Carmudi, Deddy., S.T. Perancangan Dan Implementasi Pengaman Sepeda Motor Menggunakan RFID. Skripsi. Teknik dan Ilmu Komputer/S1. Universitas Komputer Indonesia. Bandung,
http://elib.unikom.ac.id/files/disk1/317/jbptunikompp-gdl-dedicarmud-15833-5-daftarp-a.doc
Permana, Cresta. (2013). Rancang Bangun Brankas Pengaman Otomatis Berbasis Multimedia Message Service (MMS) Menggunakan ATMEGA 32. Skripsi. Teknik dan Ilmu Komputer/S1. Universitas Komputer Indonesia. Bandung. Novita, Theresia., & Tamba, Takdir. Perancangan Alat Pengaman Kendaraan
Bermotor Roda Dua Berbasis Mikrokontroler ATmega8535Menggunakan RFID, Fisika FMIPA USU.
---, ID SERIES DATASHEET. (2005).
https://www.sparkfun.com/datasheets/Sensors/ID-12-Datasheet.pdf ---, ATmega128/ATmega128L DATASHEET
DAFTAR PUSTAKA
1. http://fahmizaleeits.wordpress.com/modulasi.html ( diakses 19 februari 2014)
1. http://marausna.wordpress.html (diakses 12 januari 2014) 2. http://www.inzarsalfikar.html (diakses pada 09 maret 2014) 3. http://id.wikipedia.org/wiki/Simplex/duplex
4. http://datasheet.com/
5. http://akatellaboratoriumtedantd.blogspot.html (diakses 12 agustus 2014 6. www.elib.unikom.ac.id/elektro/2012
7. Roberto. Tugas Akhir "FM Portable". Bandung : UNIKOM Bandung 8. Library.binus.ac.id?/teori umum arduino/2011 (diakses 20 Juli 2014) 9. http://www.engineeringtoolbox.com/voice-level-d_938.html (diakses 30
Maret 2014)
v KATA PENGANTAR
Alhamdulillahi robbil’alamin, segala puji hanya milik Allah SWT tuhan
semesta alam. Shalawat serta salam semoga selalu tercurahkan kepada Nabi Muhammad SAW beserta para sahabatnya. Berkat rahmat dan hidayah-Nya-lah penulis dapat menyelesaikan tugas akhir ini sesuai dengan waktu dan persyaratan yang telah ditentukan.
Karya tulis ini disusun untuk memenuhi Tugas Akhir (TA) sebagai salah satu syarat kelulusan program sarjana pada Program Studi Teknik Elektro, Fakultas Teknik dan Ilmu Komputer, Universitas Komputer Indonesia.
Pada kesempatan ini, penulis ingin menyampaikan rasa terima kasih kepada pihak-pihak yang telah membantu penulis dalam penyusunan karya tulis ini baik secara langsung maupun tidak langsung, diantaranya:
1. Untuk kedua orang tua dan kaka yang tak pernah lelah untuk memberikan dukungan materi, semangat dan doa sehingga penulis dapat menyelesaikan tugas akhir ini. Terima kasih yang tak terhingga.
2. Bapak Muhammad Aria, M.T. sebagai Ketua Program Studi Teknik Elektro UNIKOM sekaligus Dosen Pembimbing yang selalu memberikan masukan, arahan dan mendidik dengan tegas selama penyusunan Tugas Akhir ini.
vi 4. Bapak Boby Kurniawan, S.T., M.Kom. selaku Dosen Wali Teknik Elektro 2009 yang telah memberikan masukan dan arahan selama penyusunan Tugas Akhir ini.
5. Dosen-dosen Teknik Elektro yang telah banyak memberikan ilmu selama penulis menjalankan perkuliahan.
6. Bapak Irwan, S.T. selaku dosen LB Teknik Elektro yang telah memberikan arahan, masukan dan bantuan selama mengerjakan alat Tugas Akhir.
7. Teman-teman seangkatan Teknik Elektro 2009 terima kasih untuk saling memberikan semangat selama ini.
8. Teman-teman Himpunan Mahasiswa Teknik Elektro yang telah memberikan semangat selama pengerjaan Tugas Akhir.
9. Dan semua pihak yang tidak mungkin penulis sebutkan satu-persatu, terima kasih atas motivasi dan segala bantuan serta masukannya.
Akhir kata, penulis menyadari bahwa masih terdapat banyak kekurangan dan kesalahan dalam menyusun laporan tugas akhir ini. Oleh karena itu, kritik dan saran dari pembaca sangan bermanfaat. Semoga semua bantuan dan masukan yang telah diberikan dalam pembuatan karya tulis ini ini menjadi amal baik yang kelak akan mendapatkan balasan yang lebih dari Allah, SWT. Semoga tugas akhir ini dapat bermanfaat bagi semua pihak, penulis khususnya dan pembaca umumnya.
1
BAB I PENDAHULUAN 1.1. Latar Belakang
Maraknya pencurian yang terjadi khususnya pada sepeda motor membuat banyak orang berusaha untuk lebih meningkatkan sistem keamanan sepeda motor baik menggunakan alat-alat pengaman, maupun dengan menggunakan jasa pengamanan seperti satpam atau petugas parkir. Meskipun keamanan yang diberikan cukup ketat akan tetapi masih saja terkadang dapat dibobol oleh pencuri, hal ini bisa saja terjadi karena lalainya petugas keamanan.
Melihat keadan yang demikian maka ditawarkan kunci pengaman kendaraan bermotor menggunakan Radio Frequency Identification (RFID) dan sistem pendeteksi keberadaan motor menggunakan Global Positioning System (GPS). Kunci ini dipasangkan pada kendaraan bermotor dan kunci kontak RFID juga dilengkapi TAG ID sebagai alat untuk menyalakan dan mematikan mesin motor dan GPS ini memiliki fungsi untuk mengetahui titik koordinat dimana keberadaan motor apabila hilang atau dicuri.
2
kunci RFID dilengkapi dengan sistem alarm dan sistem informasi keadaan kendaraan yang dikirim melalui SMS ke Handphone (HP) pemilik kendaraan, sehingga apabila TAG ID yang digunakan tidak sesuai dengan kode TAG ID yang disimpan pada mikrokontroler, maka secara otomatis akan menghidupkan alarm dan mengirimkan SMS pada HP pemilik kendaraan yang berbunyi kendaraan sedang tidak aman.
1.2 Identifikasi Masalah
Dari latar belakang permasalahan diatas, maka teridentifikasi beberapa permasalahan yang muncul, yaitu :
1. mengganti kunci kontak konvensional kendaraan bermotor dengan kunci RFID readder untuk meminimalisir terjadinya pencurian kendaraan bermotor roda dua dengan cara pembobolan kunci kontak, 2. mengetahui keadaan kendaraan bermotor apabila ada yang mencoba
menyalakan tanpa TAG ID,
3. mengetahui keberadaan kendaraan bermotor apabila ada yang mencoba membobol kunci kontak.
1.3 Rumusan Masalah
Mengacu pada latar belakang dan identifikasi masalah diatas, maka rumusan masalahnya adalah:
3
2. bagaimana membuat suatu sistem pengaman kendaraan bermotor roda dua yang dapat mengetahui keadaan dan keberadaan kendaraan bermotor roda dua apabila ada yang mencoba membobol kunci kontak?
1.4 Tujuan
Beberapa tujuan yang akan dicapai dari pembuatan tugas akhir ini diantaranya adalah sebagai berikut.
1. Membuat suatu sistem pengamanan untuk kendaraan bermotor agar pemilik dapat mengetahui keadaan kendaraannya apabila ada yang mencoba menyalakan tanpa menggunakan TAG ID.
2. Kunci kontak kendaraan diganti dengan RFID reader yang dilengkapi dengan TAG ID yang memiliki fungsi sama seperti starter motor yang dapat menghidupkan dan mematikan mesin motor.
3. Dapat mengetahui keberadaan kendaraan bermotor dengan mendeteksi melalui GPS dalam bentuk longitude dan latitude yang kode posisinya akan dimasukan ke google map untuk mengetahui visualisasi lokasi.
1.5 Batasan Masalah
Perancangan dan pembuatan pengaman ini hanya dibatasi pada masalah-masalah sebagai berikut:
1. hasil pembacaan modul GPS yang berupa longitude dan latitude,
2. visualisasi hasil pembacaan modul GPS menggunakan Google Maps pada handphone Android,
4
1.6 Metode Penelitian
Metode penelitian yang dilakukan adalah eksperimental dengan tahapan sebagai berikut.
1. Observasi dan studi literatur
Jenis metode pengambilan data dengan cara mengumpulkan data-data serta informasi melalui buku maupun internet, mendatangi dan melakukan tanya jawab dengan bagian mekanik bengkel motor.
2. Perencanaan dan Pembuatan Alat
Meliputi hal yang berkaitan dengan perangkat keras dan perangkat lunak · Perangkat lunak : Pemograman ATmega 128, pemograman ATmega
32, pemograman RFID, pemograman GPS, pemograman modul GSM dan HP.
· Perangkat keras : Perancangan alat dan pembuatan alat hingga
pengemasan. 3. Pengujian Alat
Setelah alat selesai dibuat maka akan dilakukan pengujian untuk mengetahui kinerja dari alat tersebut dan apakah terjadi kesalahan atau tidak.
4. Evaluasi
Melakukan evaluasi dari hasil yang sudah dilakukan selama dalam proses pembuatan alat tersebut.
5
Berisi mengenai gambaran umum dari penelitian yang berisi latar belakang dari permasalahan yang akan dijadikan topik, tujuan penelitian, batasan masalah, metode penelitian, serta sistematika penulisan.
· BAB II Dasar Teori
Berisi mengenai dasar teori alat yang digunakan sebagai dasar dalam pengolahan data.
· BAB III Pemilihan Komponen dan Perancangan
Berisi tentang latar belakang dalam pemilihan komponen untuk perancangan alat dan pembahasan tentang perancangan perangkat keras dan perangkat lunak yang akan dibuat beserta diagram blok. · BAB IV Pengujian Alat dan Analisis
Menganalisa alat yang sudah dirancang, pengoperasian alat dan cara kerja alat beserta pemograman, diagram alir dan table hasil uji.
· BAB V Penutup
5 BAB II DASAR TEORI
Pada perancangan alat pengaman motor ini menggunakan beberapa perangkat keras dan perangkat lunak. Perangkat keras dan perangkat lunak yang digunakan akan dijelaskan pada sub BAB ini.
A. Perangkat Keras
Perangkat keras atau hardware adalah perangkat yang berupa alat atau komponen – komponen yang dapat dilihat atau dipegang dan secara fisik memiliki bentuk atau ada wujudnya. Perangkat keras yang akan digunakan pada perancangan alat ini akan dijelaskan di bawah ini.
2. 1 Mikrokontroler
Penggabungan sebuah mikroprosesor, I/O dan memori (RAM/ROM) disebut mikrokomputer. Sedangkan CPU, I/O dan memori yang terdapat dalam satu chip (Single Chip Mikrokomputer, SCM) disebut mikrokontroler.
Bagian Dasar Mikrokontroler
Mikrokontroler memiliki beberapa bagian dasar didalamnya seperti CPU, memori dan I/O (Input/Output), yang tiap-tiap bagiannya memiliki fungsi. Fungsi bagian-bagian dasar mikrokontroler dijelaskan dibawah ini.
1. CPU (central prossesing unit)
6 pengendali adalah mengambil, mengkode dan melaksanakan urutan instruksi sebuah program yang tersimpan dalam memori. Unit pengendali mengatur urutan operasi seluruh sistem. Unit pengontrol mengendalikan aliran informasi bus data dan bus alamat, dilanjtkan dengan menafsirkan data mengatur sinyal yang terdapat pada bus pengendali.
2. Memori
Mikrokontroler menyimpan program pada ROM/EEPROM. Ada beberapa tingkatan memori, diantaranya register internal dan memori utama. Register internal adalah memori di dalam ALU (Arithmatich Logic Unit). Memori utama adalah memori suatu sistem. Ukurannya berkisar antara 4kbyte sampai 64kbyte.
3. Input/Output
Untuk melakukan hubungan dengan piranti diluar sistem, dibutuhkan alat I/O (input/output). I/O dapat menerima dan member data dari mikrokontroler. Ada dua macam piranti I/O, yaitu piranti serial (Universal Asynchronous Receiver-Trnsmitter, UART) dan hubungan (pararel input/output,PIO).
2.1.1 Mikrokontroler ATmega128
ATMega128 adalah mikrokontroler CMOS 8 bit daya rendah berbasis arsitektur RISC (Reduced Instruction Set Computer). Instruksi dikerjakan pada satu siklus clock, ATMega128 mempunyai throughput 16MIPS sampai 16MHz, hal ini membuat ATMega128 dapat bekerja dengan kecepatan tinggi walaupun dengan penggunaan daya rendah.
7 Spesifikasi pin ATmega128 dapat dilihat pada Gambar 2.1 dan pada penjelasan dibawah ini.
1. Saluran I/O sebanyak 56 buah, yaitu Port A, Port B, Port C, Port D, Port E, Port F dan Port G.
2. ADC 10 bit sebanyak 8 saluran.
3. 2 buah Timer/Counter 8 bit dan 2 buah Timer/Counter 16 bit. 4. Dua buah PWM 8 bit.
5. Internal SRAM sebesar 4 kbytes. 6. Memori flash sebesar 128 kbytes. 7. EEPROM sebesar 4 kbyte.
8. 2 buah Port USART untuk komunikasi serial. 9. 6 kanal PWM.
10. Tegangan operasi sekitar 4,5 V sampai dengan 5,5V.
Gambar 2.1. Spesifikasi pin Mikrokontroler Atmega128
2.1.2 Mikrokontroler ATmega32
8 konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan maksimum 16MIPS pada frekuensi 16MHz. Jika dibandingkan dengan ATmega32 perbedaannya hanya terletak pada besarnya tegangan yang diperlukan untuk bekerja. Untuk ATmega32, mikrokontroler ini dapat bekerja dengan tegangan antara 2,7-5,5V sedangkan untuk ATmega32 hanya dapat bekerja pada tegangan antara 4,5–5,5V.
ATmega32 memiliki 40 pin, yang masing-masing pin nya memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Spesifikasi pin ATmega32 dapat dilihat pada Gambar 2.2 dan pada penjelasan dibawah ini. 1. Menggunakan arsitektur AVR RISC.
131 perintah dengan satu clock cycle. 32 x 8 register umum.
2. Data dan program memori.
32 Kb In-System Programmable Flash. 2 Kb SRAM.
1 Kb In- System EEPROM.
3. 8 Channel 10-bit ADC.
4. Two Wire Interface.
5. USART Serial Communication.
6. Master/Slave SPI Serial Interface.
7. On-Chip Oscillator.
8. Watch-dog Timer. 9. 32 Bi-directional I/O.
9 Gambar 2.2. Diagram Pin Mikrokontroler Atmega32
2.2 Radio Frequency Identification (RFID)
Radio Frequency Identification (RFID) adalah sebuah teknologi penangkapan data yang memanfaatkan frekuensi radio. Dalam sistem kerjanya frekuensi radio dapat digunakan secara elektronik untuk mengidentifikasi, melacak dan menyimpan informasi yang tersimpan dalam TAG ID.
10 TAG ID digolongkan menjadi 2 macam, tag pasif dan tag aktif. TAG ID pasif tidak dapat menghantarkan data pada RFID reader jika berada di luar jangkauan sedangkan TAG ID aktif kebalikannya dan membutuhkan baterai untuk memberikan tenaga. RFID juga ada dua macam, yaitu kemampuan baca/tulis (read/write), memorinya dapat dibaca dan ditulis secara berulang-ulang yang datanya bersifat dinamis dan ada juga yang hanya mampu membaca (read only) memori yang diprogram pada saat awal, datanya tidak dapat diubah-ubah.
Cara kerja sistem RFID seperti pada Gambar 2.3 umumnya, TAG ID didekatkan dengan RFID reader, lalu TAG ID akan mentransmisikan data yang berada di dalam TAG ID kepada RFID reader yang kemudian RFID reader akan memproses dengan cara mengirimkan informasi yang berupa data angka serial ke mikrokontroler untuk diolah menjadi informasi sesuai dengan aplikasi berbasis RFID seperti pada gambar di bawah ini.
Gambar 2.3 Cara kerja sistem RFID
2.2.1 Frekuensi Radio RFID
11 a Band Low Frequency (LF)
Berkisar antara frekuensi 125 KHz hingga 134 KHz, rentang 1,5 kaki bila menggunakan antena luar dan kecepatan bacanya rendah , digunakan untuk sistem anti pencurian, identifikasi hewan dan sistem kunci kendaraan.
b Band High frequency (HF)
Beroperasi pada frekuensi 13,56 MHz, rentang 3 kaki bila menggunakan antena luar dan kecepatan bacanya sedang, digunakan untuk pelacakan barang-barang di perpustakaan, toko buku, bagasi kendaraan bermotor dan bagasi pesawat/kapal.
c Band Ultra High Frequency (UHF)
Beroperasi dikisaran frekuensi 900MHz, rntang berkisar hingga 15 kaki bila menggunakan antena luar dan kecepatan bacanya tinggi, digunakan pada pelacak kontainer, truk, trailer dan terminal peti kemas.
2.2.2 Konfigurasi Pin dan Spesifikasi ID-12
12 Gambar 2.4 RFID ID-12 dan spesifikasi pin ID12
Tabel 2.1 Spesifikaasi RFID ID-12
Parameter ID-12 Jarak baca +12cm
Dimensi 26mm x 25mm x 7mm Frekuensi 125KHz
Format kartu EM4001 atau yang kompatibel Encoding Manchaster 64-bit, modulus 64 Jenis Catudaya 5 VDC pada 30mA nominal Arus Output I/0 -
Jangkauan
Catudaya +4,6V sampai +5,4V
2.2.3 Tingkat Akurasi Sistem RFID
Tingkat akurasi RFID didefinisikan sebagai tingkat keberhasilan RFID reader melakukan identifikasi sebuah tag yang berada pada area kerjanya. Keberhasilan dari proses identifikasi sangat dipengaruhi oleh beberapa batasan fisik, yaitu:
1. posisi antena pada RFID reader, 2. batasan catu daya,
13 2. 3 Global Positioning System (GPS)
GPS merupakan sebuah sistem navigasi dan posisi yang berbasis satelit yang mengorbit pada bumi dengan ketinggian sekitar 11.000 mil dari bumi. Satelit yang mengitari bumi pada orbit pendek ini terdiri 24 susunan satelit, dimana 21 satelit digunakan secara aktif dan 3 buah satelit digunakan sebagai cadangan apabila terdapat satu atau lebih satelit yang gagal berfungsi.
GPS yang dimaksudkan pada perancangan alat ini adalah GPS receiver yang mana dapat menitik posisikan manapun di bumi, sehingga dapat melacak posisi keberadaan sekarang. GPS dapat beroperasi selama 24 jam dan dapat digunakan di seluruh wilayah muka bumi ini, karena GPS menggunakan satelit yang selalu mengorbitkan pada bumi selama 24 jam.
Sistem GPS menggunakan sejumlah satelit yang berada di orbit bumi, yang memancarkan sinyalnya ke bumi dan ditangkap oleh sebuah alat penerima. Ada tiga bagian penting dari sistem ini, yaitu bagian kontrol, bagian angkasa dan bagian pengguna.
14 Penguncian sinyal satelit yang keempat membuat pesawat penerima GPS dapat menghitung posisi ketinggian titik tersebut terhadap muka laut rata-rata (Mean Sea/Level) atau disebut 3D fix dan keadaan ini yang ideal untuk melakukan navigasi. GPS yang digunakan pada perancangan alat ini adalah GPS modul EM-406A.
2.3.1 Spesifikasi GPS Modul EM-406A
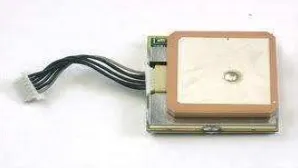
EM-406a seperti pada Gambar 2.5 adalah salah satu modul GPS yang harganya relative murah dan tetap mempertahankan keandalan yang tinggi dan akurasi yang baik. EM-406a merupakan pilihan yang ideal untuk berintegrasi dengan OEM/ODM sistem. EM-406a juga memiliki patch yang terintegrasi antena untuk implementasi legkap, spesifikasi pin EM-406a dapat dilihat pada Gambar 2.6 dan pada Tabel 2.2.
Fitur produk EM-406a yaitu:
· SiRF Star III chipset GPS kinerja tinggi,
· sensitivitas yang sangat tinggi (Pelacakan Sensitivitas:-159dBm),
· TTFF Sangat cepat (waktu untuk pertama perbaikan) di tingkat sinyal
rendah,
· mendukung NMEA 0183 data protocol,
· built-in supercap untuk mempertahankan sistem data akuisisi satelit cepat, · foliage lock untuk pelacakan sinyal lemah,
· 100ms waktu re-akuisisi.
· Power Supply - 5Vdc
15 · Dimensi: panjang 30mm, lebar 30mm, tinggi 10mm.
Gambar 2.5. Modul GPS EM-406a
Gambar 2.6. Spesifikasi Pin modul GPS EM-406a · VCC (input daya DC): suplay DC utama untuk 4.5V ~ 6.5V.
· TX: saluran transmisi utama untuk keluaran navigasi dan pengukuran data
pengguna perangkat lunak navigasi atau yang telah ditulis oleh user. · RX: menerima saluran utama untuk menerima perintah dari perangkat
lunak ke modul EM-406a. bila pin ini tidak digunakan maka pin harus terhubung dari VCC dengan menghubungkan 470ohm resistor secara seri dengan dioda zener 3,2 Volt ke ground.
· GND: Ground berfungsi untuk menetralisir cacat (noise) yang disebabkan
oleh daya yang kurang baik, ataupun kualitas komponen yang tidak standar.
· PPS: Pin ini menyediakan pulsa keluaran per-satu detik dari modul yang
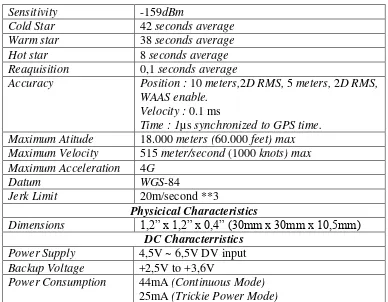
16 Tabel 2.2. Spesifikasi modul GPS EM-406a
Sensitivity -159dBm
Cold Star 42 seconds average Warm star 38 seconds average
Hot star 8 seconds average
Reaquisition 0,1 seconds average
Accuracy Position : 10 meters,2D RMS, 5 meters, 2D RMS, WAAS enable.
Velocity : 0.1 ms
Time : 1µs synchronized to GPS time. Maximum Atitude 18.000 meters (60.000 feet) max Maximum Velocity 515 meter/second (1000 knots) max Maximum Acceleration 4G
Datum WGS-84
Jerk Limit 20m/second **3
Physicical Characteristics
Dimensions 1,2” x 1,2” x 0,4” (30mm x 30mm x 10,5mm) DC Characterristics
Power Supply 4,5V ~ 6,5V DV input Backup Voltage +2,5V to +3,6V
Power Consumption 44mA (Continuous Mode) 25mA (Trickie Power Mode)
2.3.2 Format Data GPS
Format data GPS adalah format yang dilakukan untuk mengirim data pada satelit sehingga satelit dapat mengidentifikasi dimana letak keberadaan sinyal yang dikirim GPS dan satelit mengirim balik data pada GPS yang berupa longitude dan latitude. Format data yang akan dikirim harus di awali dengan simbol dolar ($) yang memiliki fungsi sebagai inisial. Format data GPS terdiri dari beberapa macam yaitu:
· $GPGGA (Global positioning system fixed dat)
· $GPGLL (Geographic position - latitude / longitude) · $GPGSA (GNSS DOP and active satellites)
17 · $GPRMC (Recommended minimum specific GNSS data)
· $GPVTG (Course over ground and ground speed)
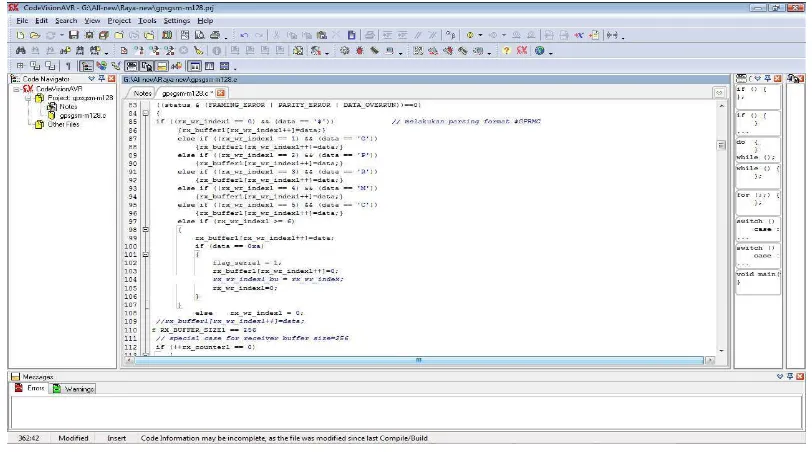
Pada perancangan alat ini, format data yang digunakan adalah $GPRMC. Menggunakan format data $GPRMC karena disini hanya membutuhkan untuk menampilkan waktu, tanggal, latitude, longitude, N/S, E/W serta validitas data.
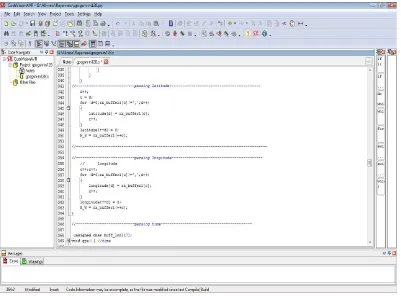
Program pada Gambar 2.7 digunakan untuk parsing data GPS dengan menggunakan perintah “if”. Pada program tersebut jika pada data yang diterima oleh ATmega 128 terdapat format $GPRMC maka selanjutnya data akan diambil sebanyak 60 karakter setelah format tersebut. Data yang diambil selanjutnya diinisialisasikan dengan format integer i.
Setelah melakukan parsing data, kita juga melakukan formula berikutnya untuk menunjukan waktu, tanggal, latitude, longitude, N/S, E/W serta validitas data. Untuk mengetahui dan menampilkan waktu, tanggal, latitude dan longitude disini menggunakan formula seperti di tunjukan pada Gambar 2.8 , 2.9 dan Gambar 2.10.
18 Gambar 2.8 Parsing data GPS untuk kalender.
19 Gambar 2.10 Parsing data GPS menampilkan latitude dan longitude.
2. 4 Modul GSM SIM900
Pada aplikasi pembuatan alat ini menggunakan modul SIM900 buatan Shanghai pada tahun 2010. Modul SIM900 adalah modul GSM/GPRS wireless yang memiliki pengiriman data GPRS hingga 85,6kbp, Quad-Band 850/ 900/ 1800/ 1900 MHz.
20 Gambar 2.11 Modul GSM SIM900
Gambar 2.12 Spesifikasi pin SIM900
2. 5 Handphone (HP)
21 HP diperancangan alat ini digunakan sebagai pengontrol yang dimana HP akan mengirimkan data berupa sms pada modul GSM yang telah dihubungkan dengan mikrokontroler dan mikrokontroler akan mengirimkan sinyal pada relay untuk menyalakan atau mematikan yang dimana relay tersebut telah dihubungkan dengan mesin motor dan kontak motor. HP disini juga di fungsikan untuk mencari letak posisi kendaraan yang terdeteksi oleh GPS menggunakan aplikasi google map.
Pada perancangan alat pengaman ini, di sarankan menggunakan HP yang memiliki teknologi tinggi dan termasuk HP pintar /smartphone, maka disini penulis menggunakan HP Android sebagai alat komunikasi antara pengguna perangkat alat pengaman kendaraan bermotor dengan alat yang ditanam di kendaraan bermotor.
Dapat di jelaskan bahwa Android adalah system operasi berbasi Linux yang diperuntukkan khusus untuk smartphone. Seperti ciri khas Linux pada umumnya, penggunanya Android juga diberi hak penuh untuk menciptakan aplikasi mereka sendiri.
Kalau dilihat dari sejarah, awal tercipatanya Android berasal dari Android Inc, setelah melalui berbagai pengembangan hingga terbentuk Open Handset Alliance, Android langsung di akusisi oleh Google.
22 Kelebihan & Kekuarangan Handphone Android
1 Kelebihan Handphone Android
· System Operasi bersifat open source, jadi sangat memungkinkan
penggunanya untuk membuat software sendiri.
· Banyak aplikasi baik software maupun game yang bisa kita nikmati
mulai dari yang berbayar sampai gratis.
· Memiliki perangkat GPS yang cukup canggih.
· Dari segi tampilan, terlihat elegant.
· Bersifat multitasking yang artinya bisa menjalankan berbagai
aplikasi sekaligus, itu artinya anda bisa menjalankan browsing, Facebook, YM, sambil mendengerkan lagu sekaligus, namun semua itu juga tergantung dari processor HP tersebut. Jadi sebelum membeli HP Android pastikan memiliki processor minimal 1Gz untuk kelancaran Multitasking.
· Widget, yang berfungsi untuk mempermudah penggunanya dalam
melakukan setting atau memilih aplikasi yang akan dijalankan.
· Syngkronisasi, jika anda pengguna Gmail ataupun Ymail, anda
dapat menginterigrasikan dengan HP anda, sehingga akan memepermudah anda mengecek atau mengirim email.
2 Kekurangan Handphone Android
23
· Iklan, Jika Anda menggunakna aplikasi yang bersifat gratis, iklan akan
selalu muncul pada aplikasi tersebut dan munculnya iklan hanya pada saat anda terhubung ke internet.
· Koneksi Internet yang mahal, pada saat browsing memang cepat dan
tidak ada hambatan, namun biaya untuk internetpun juga sesuai dengan kecepatan tersebut.
2. 6 Relay
Relay adalah sebuah saklar elektromagnetik yang prinsip kerjanya menggunakan kumparan listrik, dimana sebuah kumparan yang berintikan sebuah lempengan besi lunak yang apabila dialiri aliran listrik, maka lempengan besi lunak tersebut akan menjadi magnet. Magnet tersebut menarik atau menolak pegas kontak sebuah alat penghubung dan akibatnya akan terjadi kontak dan lepas kontak dari alat penghubung tersebut.
Prinsip seperti ini dapat dimanfaatkan sebagai dasar pembuatan saklar otomatis yang banyak dipergunakan dalam bidang elektronika. Relay yang digunakan pada alat ini adalah relay tipe HRS4H-S-DC12V 5 kaki seperti pada Gambar 2.13 dan spesifikasi kaki-kaki pin seperti pada Gambar 2.14.
24 Gambar 2.14 Spesifikasi Relay 5 kaki
2. 7 Sistem Pelistrikan Motor
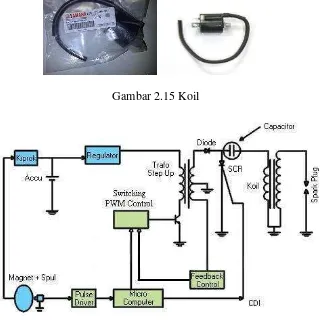
Koil seperti pada Gambar 2.15 adalah sebuah kumparan induksi dalam sistem pelistrikan yang berfungsi untuk menaikan tegangan 12V menjadi tegangan tinggi 15 – 20KVolt yang diperlukan untuk pengapian. Untuk menaikan tegangan rendah tersebut pada koil terdapat dua kumparan yaitu kumparan sekunder dan kumparan primer.
Kumparan skunder adalah kumparan yang memiliki fungsi untuk menambah induksi menjadi tegangan tinggi yang selanjutnya dialirkan ke busi. Ciri kumparan sekunder adalah memiliki penampang yng kecil dengan jumlah gulungan banyak.
25 Gambar 2.15 Koil
Gambar 2.16. Sistem pelistrikan pada kendaraan bermotor roda dua.
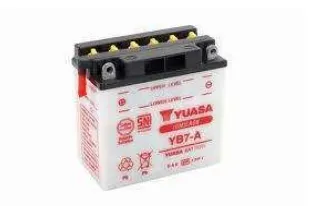
2. 8 Catu Daya
26 Gambar 2.17 ACCU
ACCU merupakan tempat penyimpanan tegangan yang dihasilkan dari pengapian motor yang akan dialirkan keseluruh sistem motor. ACCU juga digunakan sebagai sumber tegangan untuk rangkaian pengaman yang dibuat penulis
Tegangan 5Volt DC yang digunakan oleh rangkaian diperoleh dengan cara memasang sebuah IC regulator LM7805 yang dapat memberikan tegangan stabil 5Volt DC yang dibutuhkan oleh IC pengontrol utama ATmega128. IC regulator LM7805 ditunjukan paga Gambar 2.18.
Gambar 2.18 LM7805 B. Perangkat Lunak
Perangkat lunak atau software adalah program komputer yang isi
intruksinya dapat diubah dengan mudah. Software pada umumnya digunakan
27 2. 9 Short Message Service (SMS)
SMS merupakan salah satu fitur dari GSM (Global System for Mobile Communication) yang dikembangkan dan distandarisasi oleh ETSI (European Telecommunications Standard Institute). Pada saat kita mengirim pesan SMS dari handphone, maka pesan SMS tersebut tidak langsung dikirim ke handphone tujuan, akan tetapi terlebih dahulu dikirim ke SMS Center (SMSC) dengan prinsip Store and Forward, setelah itu baru dikirimkan ke handphone yang dituju.
Dari SMSC ini dapat diketahui status dari SMS yang dikirim, apakah telah sampai atau gagal diterima oleh handphone tujuan. Apabila handphone tujuan dalam keadaan aktif dan menerima SMS yang dikirim, ia akan kembali mengirimkan pesan konfirmasi ke SMSC yang menyatakan bahwa SMS telah diterima. Kemudian SMSC mengirimkan kembali status tersebut kepada pengirim.
Tetapi jika handphone tujuan dalam keadaan mati atau diluar jangkauan, SMS yang dikirimkan akan disimpan pada SMSC sampai periode validitas terpenuhi. Jika periode validitas terlewati maka SMS itu akan dihapus dari SMSC dan tidak dikirimkan ke handphone tujuan. Disamping itu, SMSC akan mengirim pesan informasi ke nomor pengirim yang menyatakan pesan dikirim belum diterima atau gagal. Proses pengiriman SMS dapat dilihat pada gambar dibawah ini.
28 Mekanisme Store And Forward Pada SMS
SMS adalah data tipe asynchronous message yang pengiriman datanya dilakukan dengan mekanisme protokol store and forward. Hal ini bahwa pengirim dan penerima SMS tidak perlu berada dalam status berhubungan (connected/online) satu sama lain ketika akan saling bertukar pesan SMS. Pengiriman pesan SMS secara store and forward berarti pengirim pesan SMS menuliskan pesan dan nomor telepon tujuan dan kemudian mengirimkannya (store) ke server SMS (SMS-Center) yang kemudian bertanggung jawab untuk mengirimkan pesan tersebut (forward) ke nomor telepon tujuan.
Keuntungan mekanisme store and forward pada SMS adalah, penerima tidak perlu dalam status online ketika ada pengirim yang bermaksud mengirimkan pesan kepadanya, karena pesan akan dikirim oleh pengirim ke SMSC yang kemudian dapat menunggu untuk meneruskan pesan tersebut ke penerima ketika ia siap dan dalam status online dilain waktu. Ketika pesan SMS telah terkirim dan diterima oleh SMSC, pengirim akan menerima pesan singkat (konfirmasi) bahwa pesan telah terkirim (message sent). Hal-hal inilah yang menjadi kelebihan SMS dan populer sebagai layanan praktis dari sistem komunikasi bergerak.
2. 10 Google Map
29 google maps API. Saat ini google map adalah layanan pemetaan berbasis web yang populer.
Dengan google map kita dapat mencari letak keberadaan suatu tempat diseluruh dunia hanya dengan cara memasukan nama tempat yang kita cari atau dengan memasukan koordinat suatu wilayah yang dituju. Sebagai contohnya dengan menuliskan longitude dan latitude seperti pada Gambar 2.20 yang terditeksi oleh GPS dan kita masukan pada aplikasi google map kita dapat langsung mengetahui letak serta jalan mana yang dapat dilewati seperti yang ditunjukan pada Gambar 2.21. Longitude dan latitude yang terdeteksi oleh GPS akan dimasukan pada aplikasi google map untuk mengetahui nama jalannya harus dipisahkan dengan koma (,).
Gambar 2.20 Pencarian alamat menggunakan kode Longitude dan Latitude
30 2. 11 Bahasa C
Bahasa C adalah bahasa pemograman tingkat menengah diatas bahasa assembly. Bahasa pemograman ini ditulis dengan sandi yang hanya di mengerti oleh mesin saja, oleh karena itu hanya digunakan bagi yang memprogram mikroprosesor.
Program dalam bahasa C ini selalu berbentuk fungsi seperti dengan menggunakan main (), program yang dijalankan berada di dalam tubuh program yang dimulai dengan tanda kurung kurawal buka “{“ dan di akhiri dengan kurung kurawal tutup “}”. Sedangkan tanda kurung buka dan kurung tutup “( )”
digunakan untuk mengapit argument suatu fungsi. Semua yang tertulis dalam tubuh program disebut blok. Program compiler C yang digunakan pada tugas perancangan alat ini adalah CodeVision AVR.
2. 12 CodeVision AVR
CodeVision AVR merupakan sebuah software yang digunakan untuk memprogram mikrokontroler yang sekarang ini telah umum. Mulai dari penggunaan untuk kontrol sederhana sampai kontrol yang cukup kompleks, mikrokontroler dapat berfungsi jika telah diisi sebuah program, pengisian program ini dapat dilakukan menggunakan compiler yang selanjutnya di download ke dalam mikrokontroler menggunakan downloader. Salah satu compiler program yang umum digunakan sekarang ini adalah CodeVision AVR yang menggunakan bahasa pemrograman C.
31 mikrokontroler yang akan kita gunakan. CodeVision telah menyediakan konfigurasi yang bisa diatur pada masing-masing chip mikrokontroler yang akan kita gunakan, sehingga kita tidak perlu melihat datasheet untuk sekedar mengonfigurasi mikrokontroler.
2. 13 AT Command
AT Command berasal dari kata Attention Command. Attention berarti peringatan atau perhatian, sedangkan Command berarti perintah atau instruksi. AT Command ialah perinah atau instruksi yang dikenakan pada modem GSM atau telepon selular. Perintah-perintah yang diberikan selalu diawali dengan “AT” dan di akhiri dengan “<CR>” atau Carriage Return. Dengan menggunakan AT
Command dapat mengakses beberapa perintah, diantaranya mengirim dan menerima SMS, mendapat informasi mengenai status HP, status modul GSM dan lain-lain, namun tidak dapat semua perangkat dapat mengimplementasikan AT Command.
AT Command memiliki dua tipe, yaitu Basic Command dan Extended Command. Basic Command adalah AT Command yang tidak dimulai dengan “+”. Contohnya ATD (Dial), ATA (Answer), ATH (Hook Control) dan ATO (kembali pada kondisi data online). Sedangkan Extended Command adalah AT Command yang dimulai dengan “+”. Contohnya +CMSG (mengirim SMS), +CMGR
(membaca SMS), +CMGL (membaca semua SMS) dan +CMSS (mengirim SMS dari semua media penyimpanan).
32 1. AT+CMGS = untuk mengirim SMS.
Format penulisan perintah ini adalah “AT+CMGS= <length><CR>(PDU
is given<ctrl-Z/ESC>)”. Jika pengiriman berhasil maka format respon yang akan diterima adalah “+CMGS: <mr>”, dimana <mr> adalah Message Reference. Sedangkan jika pengiriman gagal maka format respon yang akan diterima adalah “+CMS ERROR: <err>”.
2. AT+CMGR = untuk membaca SMS.
Format penulisan perintah ini adalah “AT+CMGR=<index>”, dimana
<index> adalah nomor lokasi penyimpanan SMS. Jika berhasil maka format
respon yang akan diterima adalah ”+CMGR:
<stat>,[<alpha>],<length><CR><LF><PDU>”. Sedangkan jika gagal maka format respon yang akan diterima adalah “+CMS ERROR: <err>”.
3. AT+CMGL = untuk melihat semua daftar SMS.
Format penulisan perintah ini adalah “AT+CMGL=<stat>”. Jika berhasil
maka format respon yang akan diterima adalah “+CMGL:<index>,<stat>,[<alpha>],<length><CR><LF><PDU>[<CR>]<LF>+
CMGL:<index>,<stat>,[<alpha>],<length><CR><LF><PDU>[<CR>]<LF>[...]]” . Sedangkan jika gagal maka format respon yang akan diterima adalah “+CMS
ERROR: <err>”.
4. AT+CMGD = untuk menghapus SMS pada lokasi penyimpanan SMS. Format penulisan perintah ini adalah “AT+CMGD=<index>”, dimana
<index> adalah nomor lokasi penyimpanan SMS. Jika berhasil maka format respon yang akan diterima adalah “OK”. Sedangkan jika gagal maka format
33 2.14 Google Maps Pada HP Android
Android adalah system operasi berbasi Linux yang diperuntukkan khusus untuk smartphone. HP android ini di lengkapi dengan segala fasilitas dan fitur yang luar biasa sehingga memudahkan penggunanya melakukan aktifitas yang berhubungan dengan teknologi, salah satunya adalah Google Maps. Cara kerja dan penggunaan Google Maps pada HP Android tidak jauh berbeda dengan PC, cukup memasukan nama alamat atau longitude dan latitude yang akan dicari lalu tekan enter/search.
Sebelum menjalankan aplikasi Google Maps pada HP Android, kita harus mengunduhnya terlebih dahulu. Aplikasi ini tersedia di Google play, seperti pada Gambar 2.22 tampilan aplikasi Google Maps bila akan di install.
Gambar 2.22 Tampilan aplikasi Google Maps bila akan di install. Setelah selesai menginstal, maka akan ada tampilan “Welcome to Gppgle
34 Gambar 2.23 Layar pembuka setelah menginstal.
35 BAB III
PEMILIHAN KOMPONEN DAN PERANCANGAN
3.1 Pemilihan Komponen
Pemilihan komponen dalam perancangan dan pembuatan alat pengaman kendaraan ini menggunakan suatu komponen elektronik yang telah dipilih berdasarkan efisiensi, tingkat keakuratan, bentuk serta dimensi komponen dan dana yang dikeluarkan. Pemilihan ini sangat diperlukan untuk meminimalis terjadinya pemborosan dana yang dikeluarkan dan untuk mengetahui komponen yang digunakan memiliki tingkat keakuratan yang baik saat komponen bekerja di banding dengan komponen yang dibandingkan.
3.1.1 Mikrokontroler
Perancangan sistem pengaman kendaraan bermotor roda dua ini menggunakan mikrokontroler ATmega128 dan ATmega32. Dibawah ini adalah tabel perbandingan antara ATmega 128, ATmega32, ATmega16 dan ATmega8.
Tabel 3.1. Perbandingan Mikrokontroler ATmega128, ATmega8, ATmega16 dan ATmega32
ATmega128 ATmega8 ATmega16 ATmega32
36 banyak sebagai mikrokontroler utama dan memiliki 2 RX dan 2 TX dan menggunakan ATmega32 sebagai mikrokontroler yang ke dua karena ATmega32 hanya digunakan sebagai pengendali RFID sehingga tidak membutuhkan banyak memori dan I/O dan harganya lebih murah.
3.1.2 Radio Frequency Identification (RFID)
RFID adalah proses identifikasi seseorang atau objek dengan menggunakan frekuensi transmisi radio. RFID menggunakan frekuensi radio untuk membaca informasi dari sebuah devais kecil yang disebut tag atau transponder (Transmitter + Responder). Tag ID akan mengenali diri sendiri ketika mendeteksi sinyal dari alat yang kompatibel, yaitu pembaca RFID (RFID Reader).
Tabel 3.2 Perbandingan antara RFID ID 2, ID12 dan ID20
ID 2 ID12 ID20
Frekuensi 125KHz 125KHz 125KHz
Jenis
37 3.1.3 Global Positioning System (GPS)
GPS yang digunakan pada perancangan alat ini adalah GPS EM-406 yang berguna sebagai alat pelacak posisi kendaraan dengan keluaran data yang berupa longitude dan latitude. Uraian mengenai perbandingan jenis GPS EM-406 dibandingkan dengan GPS jenis lain dapat dilihat pada Tabel 3.3.
Tabel 3.3 Tabel Perbandingan Modul GPS
EM-406 EM-410 NEO-6M
Sensitivitas -159dBm -159dBm -162dBm
Re-akuisi data 100ms 100ms 100ms
Dimensi 30mm x 30mm x
Pembelian Central Jaya Plaza On-Line Shop On-Line Shop Harga Rp. 225.000,- Rp.250.000,- Rp.320.000,-
Pada Tabel perbandingan diatas terliham jelas perbedaan hanya pada harga dan ada atau tidaknya antena luar. Mengapa memilih EM-406 karena harga yang relatif murah dan barangnya pun mudah di dapat, dilihat dari segi sensitivitas dan re-akuisi data sama dengan modul GPS EM-410 dan NEO-6M dan tidak
membutuhkan antena luar.
3.1.4 Modul GSM SIM900
38 Tabel 3.4 Tabel Perbandingan Modul GSM
SIM900 SIM300C HP Siemens C55
Modul GSM/GPRS GSM GSM
Jaringan Quad-Band 850/ 900/ 1800/ 1900 MHz modul GSM SIM900, karena jaringannya yang sudah Quad-Band mendukung untuk GSM dan GPRS dari segi harga sama dengan SIM300C namun berbeda di jaringan dan jenis modulnya. Adapun alasan mengapa tidak menggunakan HP Siemens C55 dikarenakan dimensi yang cukup besar, harus menggunakan interface untuk komunikasi data ke mikrokontroler dan pada kondisi bekas memungkinkan HP tidak bekerja secara maksimal.
3.2 Perancangan
Pada perancangan sistem disini perancangan yang dilakukan meliputi perancangan perangkat keras dan dilanjutkan dengan perancangan perangkat lunak. Pada perancangan perangkat keras dilakukan pengaturan komponen-komponen yang telah disebutkan pada Bab II.
3.2.1 Gambaran Umum
39 pengaman kendaraan bermotor roda dua menggunakan RFID dan pembacaan letak kendaraan menggunakan GPS berbasis mikrokontroler.
Blok diagram pada Gambar 3.1 adalah blok sistem. Dalam blok sistem terdiri dari beberapa komponen yang disetiap komponennya memiliki cara kerja masing-masing yang berbeda.
Gambar 3.1 Blok Diagram Perancangan Alat Pengaman Kendaraan
40 12Volt menjadi 15KVolt - 20KVolt, untuk menyalakan sistem pengapian motor membutuhkan tegangan yang tinggi. Tanpa koil aktif, sistem pengapian motor tidak dapat berfungsi dan motor tidak dapat menyala.
Pada perancangan alat ini dilengkapi modul GPS yang dimana modul ini digunakan agar pemilik kendaraan dapat mengetahui letak keberadaan kendaraannya dimana modul GPS disini akan mengirimkan data berupa waktu , tanggal dan koordinat yang realtime, data yang didapat GPS akan dibaca oleh mikrokontroler ATmega128 lalu akan mengirimkan kembali datanya pada mikrokontroler ATmega32 untuk dapat diterima oleh modul GSM sebagai perantara komunikasi antara HP pemilik kendara dengan sistem yang terdapat pada kendaraan. HP disini memiliki fungsi utuk menerima data dan mengirimkan data pada sistem yang berupa teks melalui fitur GSM yaitu SMS.
Sistem mendapatkan tegangan yang berasala dari sumber tegangan/ACCU. Sistem disini harus standby tegangan, karena alat seperti GPS yang terus-terusan update dalam hitungan per mili second maka membutuhkan tegangan yang kontinyu dan GSM yang harus aktif kapanpun pemilik kendaraan membutuhkan data hasil pembacaan GPS dan bila kendaraan bermotor dicuri, sehingga sistem dapat langsung mengirimkan data pada HP pemilik kendaraan.
3.2.2 Perancangan Perangkat Keras
41 3.2.2.1 Rangkaian ATmega128 dan Rangkaian ATmega32
Rangkaian pengontrol utama menggunakan mikrokontroler ATmega128. Rangkaian pengontrol utama berfungsi sebagai penerima data dari pendeteksi sinyal masukan dan mengolah data – data yang masuk, menentukan operasi pengendalian input/output dan kemudian mengirimkan sinyal tersebut kesetiap pin – pin keluaran sedangkan ATmega32 hanya sebagai pengendali modul GSM yang
mana data yang didapat akan dikirimkan kembali pada ATmega128. Penggunaan port ATmega128 dan ATmega32 pada rangkaian pengontrol dapat dilihat pada Tabel 3.5 dan 3.6.
Tabel 3.5 Penggunaan Port Atmega128 BIT Port A Port B Port C Port D Port E
Tabel 3.6 Penggunaan Port Atmega32
42 3.2.2.2 Rangkaian Relay
Rangkaian relay berfungsi menggerakkan rangkaian relay yang digunakan untuk mengendalikan peralatan switch yang terdapat pada pelistrikan kendaraan bermotor. Gambar rangkaian relay dapat dilihat pada Gambar 3.2 dibawah ini.
Gambar 3.2. Rangkaian Relay
3.2.3 Perancangan Perangkat Lunak
Perancangan perangkat lunak dibahas dengan menggunakan diagram alir (flow chart). Spesifikasi fungsional perangkat lunak yang dirancang harus dapat ditentukan melalui fungsi masukan (input) dan keluaran (output) program. Melalui deskripsi perangkat keras dapat diketahui bahwa data input harus dimengerti dan akan diproses oleh program yaitu, data yang berasal dari rangkaian input. Pada perancangan perangkat lunak terdapat dua diagram alir dimana diagram alir ini terdiri dari proses menyalakan kendaraan bermotor dan proses ganti nomor HP.
Untuk proses penggantian nomor HP di inisialkan dengan “NOHP” dan
43
44 HP
Tulis pesan NOHP+(spasi)+nomor baru
Kirim pada GSM
N
Y
· Kirim pesan pada nomor HP utama pemilik kendaraan. · Non aktifkan relay. · Buzzer berbunyi.
· Simpan nomor HP baru
· Kirim pesan konfirmasi pada nomor HP baru Kode sesuai dan
ganti nomber HP=? Inisialisasi nomor HP baru
45
BAB IV
PENGUJIAN ALAT DAN ANALISIS
Pada bab ini akan menjelaskan masalah pengujian alat dilakukan secara langsung dengan cara mengoperasikannya. Pengujian ini dilakukan untuk mengetahui apakah alat-alat yang digunakan dapat bekerja sesuai fungsinya atau tidak dan untuk mengetahui seberapa besar error dari setiap pengujian.
4.1. Pengujian Dan Analisis
Pengujian dan analisis ini terdiri dari pengujian perangkat keras yaitu dari RFID reader, GPS modul, GSM modul, ACCU dan buzzer dan pengujian prangkat lunak SMS. Pengujian ini dilakukan untuk mengetahui apakah alat dapat bekerja sesuai fungsinya atau tidak dan mengetahui seberapa kecil kesalahan yang terjadi saat pengambilan data.
4.1.1. Pengujian RFID Reader
Pengujian RFID reader ini dilakukan untuk mengetahui apakah RFID reader dapat mendeteksi adanya TAG ID bila didekatkan pada RFID reader atau tidak. Pada pengujian RFID ini juga dilakukan untuk mengecek apakah RFID dapat membaca dan membedakan mana TAG ID yang kodenya sesuai dengan yang telah di inputkan pada mikrokontroler dengan TAG ID yang kodenya tidak di inputkan pada mikrokontroler.
46
Gambar 4.1 adalah tampilan pada LCD saat RFID reader menunggu adanya TAG ID yang akan di deteksi. Sedangkan pada Gambar 4.2 merupakan tampilan pada LCD saat RFID reader mendeteksi TAG ID, pada
(1) (2)
Gambar 4.2. (1) RFID mendeteksi TAG ID yang sesuai dengan milik pemilik kendaraan. (2) RFID reader mendeteksi TAG ID yang salah atau bukan AG ID
milik pemilik kendaraan.
Gambar 4.3. SMS masuk pembacaan RFID.
Gambar 4.3 menunjukan tampilan SMS saat RFID reader mendeteksi TAG ID yang salah atau bukan milik pemilik kendaraan.
47
Pada Gambar 4.4 adalah posisi saat RFID reader sudah mendeteksi TAG ID sehingga motor menyala dan saat motor menyala maka tegangan di relay menjadi 13.1 Volt.
Gambar 4.5. Hasil ukur saat tidak ada TAG ID yang terdeteksi dan mesin motor mati.
Sedangkan pada Gambar 4.5 adalah posisi saat reader tidak mendeteksi keberadaan kendaraan dan motor pun dalam keadaan mati, sehingga tegangan di relay pun menjadi 0 Volt.
48
Tabel 4.1 merupakan tabel percobaan jarak baca RFID reader terhadap TAG ID. Setelah melakukan 12 kali percobaan di dapatkan haasil baca RFID reader terhadap TAG ID dengan jarak maksimal 8 cm, karena terhalang oleh body motor yang ketebalannya mencapai 4 cm dengan hasil error 0,66%..
4.1.2. Pengujian Modul GPS
Pengujian modul GPS disini dilakukan menggunakan program hyperterminal yang terdapat pada Personal Computer (PC). Pada pengujian modul GPS ini dilakukan di beberapa tempat dan dilakukan untuk mengetes apakah GPS yang digunakan dapat menangkap sinyal yang dipancarkan oleh satelit dengan baik atau tidak, karena bila terjadi error pada GPS akan mengakibatkan pembacaan posisi kendaraan tidak benar.
Pada modul GPS dilengkapi dengan LED sebagai indikator sinyal, apabila LED berkedip maka modul GPS menangkap sinyal satelit dan bila LED tidak berkedip hanya menyala saja maka GPS masih mencari sinyal satelit. Untuk pengujian awal GPS menggunakan program hyperterminal yang terdapat pada Personal Computer (PC) dan data yang diperoleh adalah data asli GPS yang belum di konversi dapat dilihat pada Gambar 4.6.
49
NMEA memiliki beberapa format data yang dapat digunakan pada GPS. Namun dalam penelitian ini penulis menggunakan GPRMC karena disini hanya membutuhkan untuk menampilkan waktu, tanggal dan latitude, longitude. Agar data yang di dapat dari hasil GPS dapat di baca oleh Google Map, maka data GPS asli harus di konversi dalam data bacaan GPS Google Map. Angka diambil sesuai
daerah misalnya daerah Bandung dan sekitarnya adalah berada di latitude -6 dan
longitude 107.
Setelah menggunakan hyperterminal pengujian selanjutnya dilakukan langsung dengan menghubungkan dengan sistem alat pengaman kendaraan dengan media penampilnya menggunakan LCD 16x2.
Gambar 4.7. Tampilan sinyal tunggu GPS.
Gambar 4.8. Tampilan hasil bacaan GPS modul.
50
Gambar 4.9. Tampilan pada Google Map HP.
Gambar 4.9 merupakan hasil pembacaan koordinat GPS kendaraan bermotor roda dua yang di visualisasikan menggunakan Aplikasi Google Maps.
Tabel 4.2. Tabel analisa GPS
Percobaan
rumah -6.895795000,107.621326667 ± 10 meter 2 Diluar rumah -6.895793333,107.621325000 ± 3 meter 3 Dalam gang
minim sinyal -6.88902,107.616 ± 19 meter 4 Basement -6.920633,107.603703 ± 20 meter 5 Jl. Tubagus
Ismail Dalam -6,886985,107.615837 ± 13 meter 6 Jl. Titimplik -6.895790000,107.621313333 ± 3 meter 7 Jl. Titimplik -6.895791667,107.621318333 ± 10 meter 9 Jl. Titimplik -6.895790000,107.621320000 ± 0 meter 10 Jl. Gelap
Nyawang -6,8957916555,107.611228888
± 11 meter
51
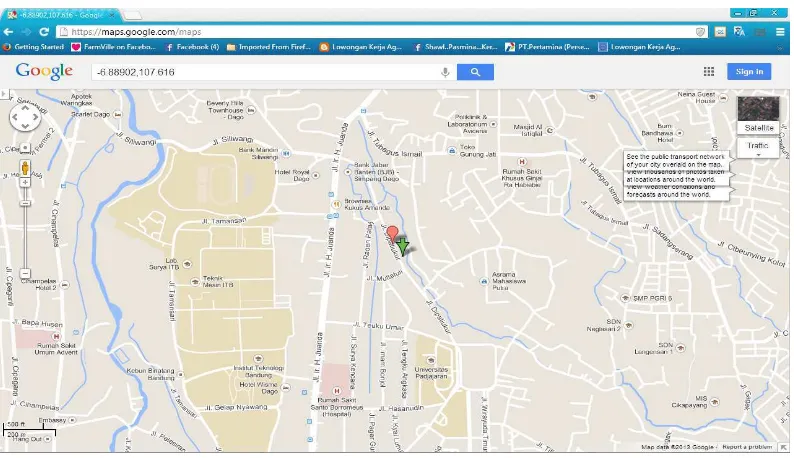
Tabel diatas merupakan tabel percobaan untuk mengukur ketepatan GPS kendaraan dengan jarak asli kendaraan dengan menggunakan aplikasi Google Map. Untuk mendapatkan hasil ukur tersebut pertama kita mengirimkan pesan untuk mengetahui lokasi kendaraan kepada GSM yang terdapat pada kendaraan, sehingga sistem dapat mengirim kembali letak kendaraan kepada HP pemilik kendaraan. Setelah pesan diterima pemilik kendaraan, posisi pemilik kendaraan harus berada di dekat kendaraan dan pesan yang di dapat dari sistem dimasukan pada aplikasi Google Map, hingga muncul posisi kendaraan seperti pada Gambar 4.10 kita bisa mengetahui berapa jarak dan melalui jalan mana yang harus ditempuh agar sampai pada kendaraan bermotor milik pemilik. Setelah melakukan percobaan pada 10 tempat yang berbeda maka diketahui rata-rata error yang terjadi mencapai 8,9% dengan jarak perbedaan posisi asli terhadap posisi Google Map mencapai 20 meter.
52
4.1.3. Pengujian Modul GSM
Modul GSM SIM 900 adalah komponen yang sangat diperlukan untuk komunikasi antara handpnone pengirim dan sistem alat, hal ini dikarenakan fungsi modul GSM sim-900 ini sebagai pengganti dari handphone yang berperan sebagai penerima SMS dari pemilik kendaraan, modul ini juga telah dilengkapi oleh simcard seperti layaknya handphone yang biasa kita pakai. Untuk menjalankan alat ini diperlukan tegangan sekitar 3,5 volt, sesuai dengan yang tercantum pada datasheet yang didapat oleh penulis.
Pengujian modul GSM ini untuk mengecek apakah alat berfungsi dengan baik atau tidak. Untuk melihat komunikasi serial ini berjalan dengan baik, maka digunakan program Hyperterminal yang terdapat pada Personal Computer (PC) yang dihubungkan dengan GSM modul.
Gambar 4.11. Cek modul GSM.
53
4.15 merupakan SMS hasil pembacaan GPS yang di kirimkan pada HP pemilik kendaraan.
Gambar 4.12. Tes pengiriman SMS.
54
Gambar 4.14. Program pengiriman data GPS ke HP.
55
Pada Gambar 4.15 merupakan hasil komunikasi antara sistem yang terdapat pada kendaraan dengan HP pemilik kendaraan untuk mengetahui apabila ada yang mencoba menyalakan dengan menggunakan TAG ID yang bukan milik pemilik kendaraan dengan adanya pesan masuk pada HP pemilk kendaraan yang
berbunyi “BAHAYA!” yang kemudian diikuti dengan pesan letak posisi
kendaraan sehingga dapat divisualisasikan menggunakan aplikasi Google Map.
4.1.4. Analisis Konsumsi Tegangan ACCU
Pada saat standby dan hanya GPS yang tetap aktif ACCU mengalami penurunan 0,15 VDC selama 24 jam, hal ini dapat dipastikan jika ACCU mampu bertahan cukup lama dalam kondisi standby. Akan tetapi pada saat sistem mendapat intruksi berupa adanya identifikasi TAG ID, alarm atau SMS, maka ACCU mengalami penurunan tegangan sebesar 0.04 – 0.05 VDC.
4.1.5. Buzzer
Tujuan dari pengujian buzzer adalah untuk mendapatkan parameter tegangan masukan yang berfungsi untuk mengaktifkan buzzer agar berfungsi dengan baik. Buzzer yang digunakan dalam perancangan pengaman kendaraan bermotor adalah buzzer dengan tegangan masukan sebesar 5Vdc. Buzzer ini dipilih agar buzzer tersebut dapat langsung dihubungkan dengan port I/O. Port mikrokontroler yang terhubung dengan buzzer adalah PORTC.7 Berikut adalah tabel hasil pengujian buzzer.
56
4.2. Analisa Alat Keseluruhan
Dari hasil pengujian masing-masing komponen yang telah dilakukan, maka didapatkan hasil yang sesuai dengan apa yang akan dirancang dalam tugas akhir ini. Dimana pada perangkat RFID reader setelah melakukan 12 kali percobaan di dapatkan hasil baca RFID reader terhadap TAG ID dengan jarak maksimal 8 cm, karena terhalang oleh body motor yang ketebalannya mencapai 4 cm dengan hasil error 0,66%, RFID reader yang memiliki fungsi untuk mendeteksi TAG ID dapat membedakan mana TAG ID pemilik kendaraan dengan TAG ID yang bukan milik pemilik kendaraan. Apabila TAG ID sesuai maka mesin motor dapat menyala, namun apabila TAG ID tidak sesuai, motor tidak dapat menyala. Apabila kontak motor dalam keadaan ON tanpa menggunakan TAG ID, maka buzzer akan menyala.
57
keadaan standby dan mesin motor dalam keadaan mati karena tidak ada TAG ID pemilik kendaraan yang terbaca.
Gambar 4.17. Hasil ukur saat standby dan mesin motor mati.
58
Agar hasil bacaan GPS modul dapat dibaca oleh aplikasi Google Map yang terdapat pada HP tanpa harus kita memasukan koordinat hasil bacaan GPS modul secara manual, maka menggunakan GSM modul sebagai media komunikasi antara pemilik kendaraan dengan sistem yang terdapat di kendaraan dengan fasilitas yang disediakan GSM yaitu SMS. GSM modul yang digunakan sudah dapat berkomunikasi dan merespon setiap ada SMS perintah dari HP pemilik kendaraan. Dimana saat pemilik kendaraan mengirim SMS pada sistem yang terdapat pada kendaraan bermotor, sistem dapat merespon dengan baik dan memproses data yang diminta oleh pemilik kendaraan. Pada GSM modul ini sudah dilengkapi dengan soket untuk tempat menyimpan SIM Card.
59
BAB IV PENUTUP
5.1 Kesimpulan
Pada perancangan alat pengaman kendaraan bermotor roda dua menggunakan RFID dan pembacaan letak kendaraan menggunakan GPS berbasis mikrokontroler dapat diambil beberapa kesimpulan.
1 Pemilik kendaraan mendapatkan informasi apabila kendaraan bermotornya ada yang mencoba menyalakan tanpa mendeteksi TAG ID terlebih dahulu, dengan adanya buzzer yang berbunyi dan ada SMS masuk pada HP pemilik kendaraan.
2 Kunci RFID digunakan sebagai kunci kontak motor yang dilengkapi dengan TAG ID yang memiliki fungsi sama seperti starter motor yang dapat menghidupkan dan mematikan mesin motor. RFID reader dapat membaca TAG ID dengan jarak maksimal 8 cm, karena terhalang oleh body motor yang ketebalannya mencapai 4 cm dengan error 0,66%.. 3 GPS dapat membaca letak keberadaan kendaraan bermotor dengan hasil
60
4 GSM modul digunakan sebagai alat penghubung komunikasi antara HP pemilik kendaraan bermotor dengan sistem yang berada di kendaraan bermotor. Sehingga apabila pemilik kendaraan ingin mengetahui keberadaan kendaraannya, cukup dengan mengirim SMS pada GSM modul dan GSM modul akan mengirim SMS kembali berupa letak koordinat kendaraan.
5.2 Saran
Dari hasil pengujian sistem pengaman kendaraan bermotor yang telah dilakuakan, penulis dapat memberikan saran bahwa:
1 membuat alat yang dimensinya lebih kecil agar dapat disimpat di tempat yang tersembunyi,
2 untuk menghindari adanya short pada pengkabelan alat, maka dalam melakukan pemasangan dan pengkabelan harus secara rapih dan teliti, 3 pilih dan gunakan RFID reader yang jarak bacanya lebih jauh agar lebih
mudah saat akan mendeteksi TAG ID,
4 agar mudah mendapatkan sinyal GPS, diusahakan berada pada tempat yang tidak tertutup tembok-tembok beton,
DAFTAR RIWAYAT HIDUP
Nama : Rayanti Ramadhian Tempat Tanggal lahir : Bandung, 29 April 1989 Jenis Kelamin : Perempuan
Golongan Darah : A Status : Lajang
Agama : Islam
Alamat Tinggal : Jl. Titimplik dalam No. 35s/151c RT 01 RW 05 Bandung 40133, Jawa Barat
No. Telepon : 0838.2059.0005
E-mail : [email protected]
PENDIDIKAN FORMAL
Nama Sekolah Program Jurusan
Universitas Komputer Indonesia
(UNIKOM) S-1 Teknik Elektro
Politeknik Manufaktur Negeri Bandung
(POLMAN) D-1 MEKATRONIKA
PENDIDIKAN NON-FORMAL
Kegiatan Tempat Tahun
Pelatihan Line Follower Robot
Analog and Digital Universitas Komputer Indonesia 2012 Pelatihan Merakit dan Instalasi
Pelatihan Menggunakan Mesin Umum
Dinas Pendidikan Balai Pengembangan
Teknologi Pendidikan 2007
Pelatihan Mesin CNC Dasar Dinas Pendidikan Balai Pengembangan
Teknologi Pendidikan 2007
Organisasi
Nama Posisi Tahun
Himpunan Mahasiswa Teknik
Elektro UNIKOM Wakil Ketua 2011 – 2012
Himpunan Mahasiswa Teknik
Elektro UNIKOM Sekretaris 2010 – 2011
Latihan Kepemimpinan dan Manajemen
Mahasiswa(LKMM) UNIKOM
Anggota 2009 – 2010
Pemuda – pemudi KARANG
TARUNA RW05 Anggota 2005 – sekarang
Pramuka SMP Negeri 44 Anggota 2001 – 2004
Pramuka SD Negeri Tikukur III Anggota 1995 – 2001
Pelatihan Kerja