Asrul Rizal Ahmad Padilah lahir di Bandung tanggal 14
September 1990. Menamatkan pendidikan SLTA di SMAN 4
Cimahi pada tahun 2009 dan melanjutkan studi S1 pada Jurusan
Teknik Komputer di Universitas Komputer Indonesia
(2009-2013). Mengerjakan Tugas Akhir dengan judul Perancangan
Robot Oktapod dengan Dua Derajat Kebebasan Asimetri. Hasil
penelitian yang menjadi tugas akhir diikutsertakan dalam ajang
kontes robot internasional yang diselenggarakan di
San M at eo, Californiadalam ajang Robogames untuk kategori Walker Challenge
(mendapatkan Gold Medal
pada tahun 2012 dan Silver Medal pada tahun 2013).
No Telepon : 085722430597
PERANCANGAN ROBOT
OKTAPOD
DENGAN DUA
DERAJAT KEBEBASAN
ASIMETRI
TUGAS AKHIR
Disusun Untuk Memenuhi Syarat Kelulusan Pada
Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Oleh
Asrul Rizal Ahmad Padilah 10209069
Pembimbing
Taufiq Nuzwir Nizar, M.Kom.
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
iii
KATA PENGANTAR
Puji syukur kehadirat Allah SWT yang telah memberikan rahmat dan
hidayah, sehingga penulis dapat menyelesaikan dengan baik karya tulis yang
berbentuk Tugas Akhir ini dengan judul “PERANCANGAN ROBOT
OKTAPOD DENGAN DUA DERAJAT KEBEBASAN ASIMETRI”.
Penulisan Tugas Akhir ini dimaksudkan untuk memenuhi salah satu
syarat kelulusan dalam menempuh pendidikan program Strata Satu (S1), Jurusan
Teknik Komputer, program studi Ilmu Komputer Fakultas Teknik dan Ilmu
Komputer, Universitas Komputer Indonesia, Bandung.
Terselesaikannya Tugas Akhir ini tentunya tidak lepas dari do’a, uluran
tangan serta saran-saran dari berbagai pihak, oleh karena itu penulis ingin
menyampaikan ucapan terimakasih dan penghargaan kepada :
1. Kedua orangtua yang tidak ada batasnya atas segala kasih sayang, doa,
kesabaran serta pengorbanannya kepada penulis semoga Allah SWT selalu
memberikan kesehatan dan kebaikan kebada mereka di dunia dan akhirat.
Amin.
2. Bapak Dr. Ir. Eddy Soeryanto Soegoto selaku Rektor Universitas Indonesia
3. Bapak Prof. Dr. H. Denny Kurniadie, Ir, M.Sc selaku Dekan Fakultas Teknik
dan Ilmu Komputer.
4. Bapak Dr. Wendi Zarman, M.Si. selaku Ketua Jurusan Teknik Komputer.
5. Bapak Dr. Yusrila Y. Kerlooza, M.T. selaku Ketua Divisi Robotika yang
selalu memberi masukan dan arahan selama melakukan penelitian di lab
robotika.
6. Bapak Taufiq Nuzwir Nizar, M.Kom. selaku pembimbing pada pelaksanaan
Tugas Akhir ini yang selalu memberi saran dan motivasi kepada penulis.
7. Bapak Rodi Hartono, S.T yang telah banyak memberikan banyak wawasan,
saran, motivasi dan koreksi yang membangun selama pembelajaran robotika
iv
8. Teman – teman Divisi Robotika Unikom dan anak – anak TEKKOM
khususnya 09TK-02, penulis mengucapkan terima kasih atas bantuan dan
dukungannya bagi penulis.
9. Seluruh rekan-rekan dan orang-orang di lingkungan Universitas Komputer
Indonesia yang telah banyak membantu penulis dalam menyelesaikan Tugas
Akhir ini yang mungkin penulis tidak dapat penulis sebutkan satu persatu.
Penulis menyadari bahwa Tugas Akhir ini masih banyak sekali kekurangan
dan jauh dari kesempurnaan mengingat berbagai keterbatasan serta kurangnya
referensi yang dimiliki oleh penulis. Oleh karena itu, penulis mengharapkan
adanya kritik dan saran yang membangun dari para pembaca. Akhir kata, semoga
Tugas Akhir ini dapat bermanfaat bagi semua pihak, khususnya bagi penulis dan
para pembaca pada umumnya.
Bandung, Agustus 2013
v
DAFTAR ISI
ABSTRAK ... i
ABSTRACT ... ii
KATA PENGANTAR ...iii
DAFTAR ISI ... v
DAFTAR GAMBAR ... vii
DAFTAR TABEL ... ix
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Maksud dan Tujuan ... 2
1.3 Batasan Masalah ... 2
1.4 Metodologi Penelitian ... 2
1.5 Sistematika Penulisan ... 3
BAB II TEORI PENUNJANG ... 4
2.1 Perangkat Keras (Hardware) ... 4
2.1.1 Mikrokontroler ... 4
2.1.2 Mikrokontroler Utama ... 5
2.1.2.1 Deskripsi pin-pin ATmega 128 ... 5
2.1.3 Mikrokontroler Sekunder ... 11
2.1.3.1 Deskripsi pin-pin ATmega 8 ... 12
2.1.4 Motor Servo ... 13
2.1.5 Kompas ... 15
2.1.6 Baterai ... 16
2.2 Perangkat Lunak (Software) ... 17
2.2.1 BASCOM-AVR ... 17
2.2.3 AVRprog ... 20
BAB III PERANCANGAN SISTEM ... 21
3.1 Perancangan Perangkat Keras (Hardware) ... 21
3.1.1 Mikrokontroler ATmega 128 ... 21
vi
3.1.3 Kompas untuk Arah Robot ... 24
3.1.4 Sensor Tekan ... 26
3.1.4 Sensor Infrared... 27
3.1.4 Kontruksi Robot ... 28
3.1.5 Catu daya ... 30
3.2 Perancangan Perangkat Lunak (Software) ... 31
3.2.1 Algoritma Dasar ... 31
3.2.2 Algoritma keseluruhan ... 32
BAB IV UJI COBA DAN ANALISA ... 38
4.1 Motor Servo Standard ... 38
4.2 Penentuan Posisi Kompas ... 41
4.3 Pengujian Algoritma Keseluruhan ... 42
BAB V KESIMPULAN DAN SARAN ... 48
5.1 Kesimpulan ... 48
5.2 Saran ... 48
vii
DAFTAR GAMBAR
Gambar 2.1 Pin out ATmega128 ... 6
Gambar 2.2 Pin out ATmega8 ... 12
Gambar 2.3 Konstruksi Motor Servo ... 13
Gambar 2.4 Diagram Blok Sistem Motor Servo ... 14
Gambar 2.5 Sistem Pemberian Pulsa Pada Servo ... 15
Gambar 2.6 Kompas Digital CMPS03 ... 15
Gambar 2.7 Baterai Li-Po ... 17
Gambar 2.8 Tampilan Editor Bascom-AVR ... 18
Gambar 2.9 Tampilan AVRprog. ... 20
Gambar 3.1 Diagram blok sistem pada Robot Oktapod degan Dua Derajat Kebebasan Asimetri ... 21
Gambar 3.2 Blok diagram komunikasi mikrokontroler ... 24
Gambar 3.3 CMPS03 Magnetic Compass ... 25
Gambar 3.4 Switch untuk proses kalibrasi kompas ... 25
Gambar 3.5 Rangkaian Sensor Tekan ... 26
Gambar 3.6 Sensor Tekan ... 27
Gambar 3.7 Sensor Infrared ... 27
Gambar 3.8 Kontruksi robot pada Solidwok ... 28
Gambar 3.9 Kontruksi kaki robot pada (a). kaki dilihat dari depan, (b). kaki dilihat dari samping ... 29
Gambar 3.10 Rangkaian regulator 5 volt LT 1083CP-5 ... 30
Gambar 3.11 Rangkaian regulator 5 volt LM29405 ... 30
Gambar 3.12 Tumpuan kaki dan arah gerak robot untuk jalan maju ... 31
Gambar 3.13. Diagram alir untuk seluruh algoritma ... 33
Gambar 3.14. Diagram alir untuk pergerakan maju ... 34
Gambar 3.15. Diagram alir untuk pergerakan belok kanan ... 35
Gambar 3.16. Diagram alir untuk pergerakan belok kiri ... 36
Gambar 3.17. Diagram alir untuk pengecekan setiap kaki terhadap objek yang dilalui ... 37
Gambar 4.1 Grafik percobaan kompas digital ... 41
viii
Gambar 4.3 Grafik waktu robot dalam menempuh rintangan tahun 2012 ... 43
Gambar 4.4 Grafik persentase pengujian robot tahun 2013 ... 44
ix
DAFTAR TABEL
Tabel 2.1 Fungsinya Yang Terdapat Pada Atmega 128 ... 6
Tabel 2.2 Instruksi Dasar pada Editor Bascom AVR ... 19
Tabel 3.1 Penggunaan pin I/O Atmega 128 ... 22
Tabel 3.2 Penggunaan pin I/O Atmega 8 ... 23
Tabel 4.1 Data Pengujian Arah Kompas ... 40
Tabel 4.2 Hasil Pengujian Algoritma Keseluruhan tahun 2012 ... 42
50
DAFTAR PUSTAKA
[1]
Malvino. (2001). Prinsip – Prinsip Elektronik, Edisi kedua. Jakarta: PT. Erlangga.
[2]
Moh. Ibnu Malik, ST. (2006). Pengantar Membuat Robot. Yogyakarta : Gava Media.
[3]
Peraturan
pertandingan
Robogames
pada
kategori
Walker
Challenge.
http://robogames.net/rules/walker.php (diakses tanggal 5 November 2011)
[4]
Schilling Robert J. (1990). Fundamental Of Robotic Analysis dan Control. Englewood
Cliffs. Prentice Hall.
[5]
ServoCity™.
Diakses
pada
13
Desember
2011
dari:
http://www.servocity.com/html/how_do_servos_work_.html .
[6]
Engineers Gerage Inspiring Creation.
http://www.engineersgarage.com/articles/servo-motor?page=3 ( diakses pada 8 Januari 2012 )
48
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan uji coba dan analisis sistem yang telah dilaksanakan, maka
dapat diperoleh beberapa kesimpulan, diantaranya :
1. Telah berhasil dibuat Robot Oktapod dengan Dua Derajat Kebebasan
Asimetri yang mampu bergerak maju, belok kanan dan belok kiri pada
medan yang tidak rata yang dibuktikan pada ajang Robogames pada
kategori Walker Challenge.
2. Robot dapat berjalan lurus pada permukaan yang tidak rata dan
melewati rintangan tidak dapat diprediksi dengan menggunakan sensor
kompas digital sebagai acuan arah navigasi robot.
3. Sistem robot yang dirancang dan dibangun dapat bekerja dengan baik.
Sehingga untuk menguji kehandalan robot, maka diikutsertakan sebuah
pertandingan robot di ajang Robogames pada kategori Walker
Challenge. Pada tahun 2012 robot ini meraih gold medal, serta pada
tahun 2013 diikutsertakan kembali dengan memperoleh silver medal
pada kategori yang sama.
5.2 Saran
Hasil penelitian ini masih jauh dari kesempurnaan, oleh karena itu perlu
dilakukan studi lebih lanjut dalam proses perancangan untuk menghasilkan robot
berkaki delapan (oktapod) yang handal. Adapun saran-saran dari Penulis yang
dapat dijadikan sebagai bahan pertimbangan dalam penelitian robot berkaki
depalan (oktapod ) lebih lanjut adalah :
1. Perlu dilakukan penelitian lebih lanjut dalam pemilihan motor servo
yang memiliki torsi besar supaya dapat membawa beban berat.
2. Perlu dilakukan penambahan beberapa sensor dan kamera, untuk dapat
mengenali lingkungan. Serta dapat mengirimkan informasi secara real
49
3. Dimensi dari robot yang telah dibangun masih terlalu kecil untuk di
implementasikan pada kehidupan nyata, oleh karena itu diperlukan
pengembangan lebih lanjut mengenai dimensi dan kontruksi robot.
1
PERANCANGAN ROBOT OKTAPOD DENGAN DUA DERAJAT KEBEBASAN ASIMETRI
Asrul Rizal Ahmad Padilah1, Taufiq Nuzwir Nizar2
1,2
Jurusan Teknik Komputer Unikom, Bandung 1
[email protected], [email protected]
ABSTRAK
Salah satu kelemahan robot dengan roda sebagai alat gerak utamanya adalah ketika melakukan navigasi pada medan yang tidak rata dan tidak dapat diprediksi. Salah satu solusi untuk mengatasi kelemahan tersebut adalah dengan merancang sebuah sistem kendali gerak robot menggunakan kaki sebagai kendali gerak utama. Pada tahun 2012, telah dilakukan penelitian dalam merancang dan membangun sebuah robot oktapod (delapan kaki) sebagai kendali gerak utama robot dengan dua derajat kebebasan asimetri yang mampu berjalan lurus pada permukaan yang tidak rata dengan tetap memertahankan keseimbangan serta kestabilan robot pada saat bernavigasi, selain itu robot berkaki ini memiliki dua derajat kebebasan, dimana robot memiliki dua arah pergerakan kaki yaitu gerak keatas dan kebawah serta kedepan dan kebelakang berdasarkan sumbu x dan y. Untuk menguji kehandalan robot yang telah dibangun, maka robot diikutsertakan dalam pertandingan robot di ajang Robogames tahun 2012 dan tahun 2013 pada kategori Walker Challenge.
Kata kunci : Gerak Asimetri, Robot Oktapod, Robogames.
1. PENDAHULUAN
Pada umumnya robot yang menggunakan roda sebagai alat geraknya akan mengalami kesulitan dalam bernavigasi pada medan yang tidak rata. Hal itu didasari oleh perbedaan ketinggian objek serta permukaan yang dilalui robot yang tidak dapat diprediksi dan dapat menyebabkan robot yang memiliki roda sebagai alat geraknya dapat tersangkut pada objek yang dilalui. Untuk menanggulangi permasalahan tersebut maka perlu di bangun robot berkaki yang memiliki kemampuan bergerak secara asimetri, yaitu kemampuan robot yang dapat membedakan ketinggian objek ketika dilewati serta memiliki kemampuan gerak dua derajat kebebasan, yaitu robot memiliki dua arah pergerakan kaki yaitu gerak keatas dan kebawah serta kedepan dan kebelakang berdasarkan sumbu x dan y.
2. PERANCANGAN
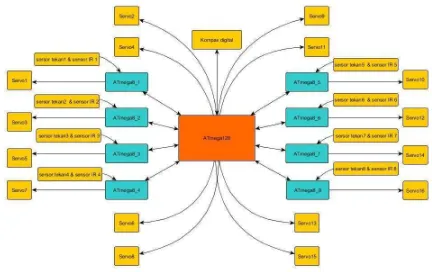
Perancangan meliputi konstruksi robot, sistem perangkat keras dan perancangan algoritma dasar. Perancangan sistem perangkat keras terdiri dari tiga bagian, pertama adalah bagian sensor, kedua bagian kontroler yang berfungsi menerima data-data dari sensor, mengolah data tersebut dan memutuskan aksi yang harus dilakukan, ketiga adalah bagian aktuator yang digunakan sebagai penggerak utama pada robot.
Gambar 1 menunjukan perancangan sistem yang dibuat.
Gambar 1. Perancangan sistem robot
SENSOR
Sensor merupakan sebuah alat yang digunakan untuk mendeteksi perubahan pada lingkungan, baik itu perubahan mekanis, cahaya, magnet bumi dan lain sebagainya. Sensor terdiri dari bagian pemancar dan bagian penerima.
A. SENSOR KOMPAS DIGITAL
Asrul Rizal Ahmad Padilah, Taufiq Nuzwir Nizar
2 mengetahui kemana robot harus bergerak. Gambar 2 menunjukan bentuk fisik dasri sensor kompas yang digunakan.
Gambar 2. Kompas digital CMPS03
Terdapat 3 pin data yang masuk ke mikrokontroler dari sensor kompas digital CMPS03 yaitu PWM, SDA, dan SCL, sinyal PWM merupakan sebuah sinyal yang telah dimodulasi lebar pulsanya, pada CMPS03 lebar pulsa positif mempresentasikan sudut arah. Arah sudut mulai dari 0 - 259 derajat dan memiliki lebar pulsa mulai dari 1ms – 36.99ms, artinya lebar pulsa bisa berubah sebesar 100us setiap derajatnya. Sinyal akan low selama 65ms di anatara pulsa, sehingga total periodenya adalah 65ms ditambah lebar pulsa positif antara 66ms sampai 102ms.
B. SENSOR INFRARED
Gambar 3. Tampilan Sensor jarak Inframerah.
Modul sensor ini memancarkan frekuensi 7Khz untuk memancarkan cahaya dan akan mengirim kembali untuk mengetahui jarak objek sebagai media pantul cahaya. Sensor infrared ini memiliki empat kaki dimana kaki 1yaitu vcc, kaki 2 yaitu vout, kaki 3 GND, dan kaki 4 led cathode.
C. SENSOR TEKAN
Sensor tekanan digunakan untuk mendeteksi tekanan pada kaki untuk menandakan apakah kaki sudah menyentuh permukaan atau belum. Sensor tekan akan berlogika LOW (0 volt) jika sensor mengalami tekanan yang menandakan bahwa kaki telah menyentuh permukaan atau objek yang dilalui dan logika HIGH (+5 Volt) jika kaki belum atau tidak menyentuh permukaan. Kedua kondisi tersebut akan diproses oleh mikrokontroler sebagai trigger yang menandakan kapan kaki harus menyentuh permukaan. Sensor tekan ini akan mempertahankan keseimbangan robot ketika berjalan pada permukaan yang tidak rata.
Gambar 4. Rangkaian sensor tekan dengan menggunakan push button.
AKTUATOR
Aktuator adalah sebuah peralatan mekanis yang mengkonversikan besaran listrik (analog) menjadi besaran mekanik, misalnya kecepatan putaran. Aktuator merupakan perangkat elektromagnetik yang menghasilkan daya gerakan sehingga dapat menghasilkan gerakan atau putaran. Salah satu tipe aktuator yang digunakan sebagai penggerak utama pada robot berkaki adalah motor servo.
A. MOTOR SERVO
PERANCANGAN ROBOT OKTAPOD DENGAN DUA DERAJAT KEBEBASAN ASIMETRI
3
dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
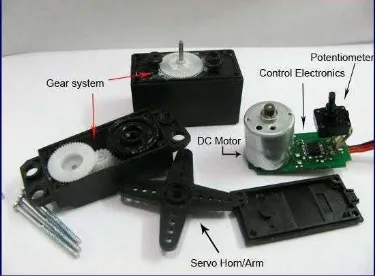
Gambar 5. Konstruksi motor servo (Engineers Gerage 2011 )
Pengendalian gerakan motor servo dapat dilakukan dengan menggunakan metode PWM (Pulse Width Modulation). Yaitu teknik memanipulasi lebar sinyal yang dinyatakan dengan pulsa dalam suatu perioda, untuk mendapatkan tegangan rata-rata yang berbeda.Tekniktersebut digunakan untuk mengendalikan putaran motor. Sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel data servo. Pada gambar 6 menunjukan pemberian pulsa dengan lebar 1.5 ms, maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
Gambar 6. Sistem pemberian pulsa pada motor servo. (ServoCity)
KONTROLER
A. MIKROKONTROLER
Mikrokontroler difungsikan untuk memproses data yang dikirimkan oleh sensor serta sebagai pengambil keputusan untuk melakukan aksi apa yang harus dieksekusi oleh robot. Pada penelitian ini digunakan dua jenis mikrokontroler yaitu Atmega128 dan Atmega8. Dimana Atmega8 sebagai pemroses data sensor dan aktuator untuk gerakan naik dan turun pada setiap kaki, dan Atmega128 sebagai otak utama pada robot, dimana mikrokontroler ini bertugas mengendalikan seluruh sistem pada robot supaya pergerakan robot bisa teratur.
a b
Gambar 7. (a) Mikrokontroler ATmega 128, (b) Atmega 8
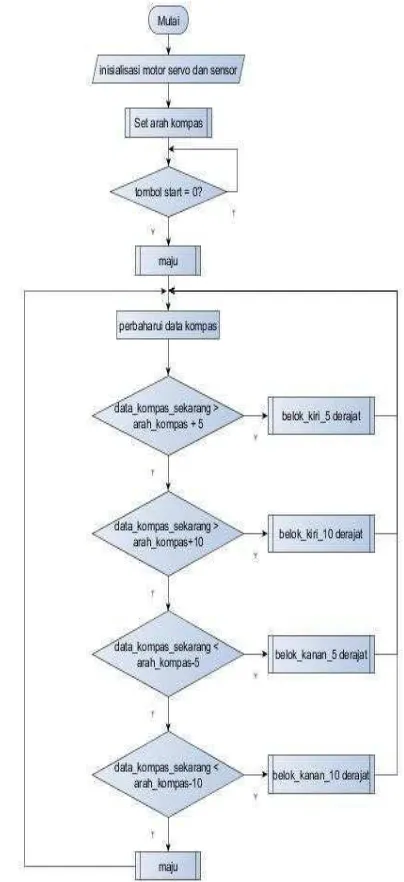
ALGORITMA
Setelah melakukan perancangan dan integrasi antar perangkat keras, selanjutnya membuat perancangan algoritma dasar untuk aksi robot. Gambar 8 menunjukan diagram alir algoritma dasar untuk pergerakan pada setiap kakinya. Dimana ke pada pada stiap kaki memiliki kemampuan bergerak dengan tinggi yang berbeda, menyesuaikan dengan tinggi objek yang dilalui robot ketika bernavigasi, disebut juga dengan kemampuan bergerak secara simetri.
Asrul Rizal Ahmad Padilah, Taufiq Nuzwir Nizar
4
Gambar 8. Diagam alir menentukan pergerakan pada masing masing kaki.
Gambar 9. Langkah pergerakan kaki dan pengecekan sensor.
Gambar 10. Diagam alir algoritma dasar
PERANCANGAN ROBOT OKTAPOD DENGAN DUA DERAJAT KEBEBASAN ASIMETRI
5 3. PENGUJIAN
Tahap pertama pengujian kompas digital terhadap sudut aktual dari kutub bumi.
A. Sensor Kompas digital
Sudut
Sudut
Terbaca Error
0 0 0
15 16 1
30 29 1
45 43 2
60 62 2
75 75 0
90 88 2
105 104 1
120 116 4
135 131 4
150 148 2
165 166 1
180 179 1
195 195 0
210 214 4
225 227 2
240 241 1
255 257 2
270 273 3
285 283 2
300 298 2
315 314 1
330 331 1
345 343 2
360 359 1
Rata-rata error 1.68
Tabel 1. Pengujian sensor kompas digital.
Tabel 1 menunjukan hasil pengujian bacaan dari sensor kompas digital yang mana membandingkan sudut sensor kompas digital dengan sudut aktual dari kutub bumi. Data hasil pengujian mengalami error, dengan
rata-rata error 1,68 derajat.
B. Sensor Infrared
Jarak (cm)
Sinyal keluaran
1 High
2 High
3 High
4 High
5 High
6 High
7 High
8 High
9 High
10 High
Tabel 2. Pengujian sensor Inframerah.
Tabel 2 menunjukan hasil pengujian jarak antara sensor inframerah dengan objek yang berada di depan kaki robot dengan posisi sensor berada pasang pada kaki dengan ketinggian 8 cm dari permukaan lantai.
Setelah dilakukan pengujian pada sensor sebagai pengidera lingkungan, tahap selanjutnya adalah pengujian robot dalam bernavigasi pada medan yang tidak rata sejauh 3 meter dengan menggunakan sensor yang telah diuji sebelumnya. Pengujian robot di lakukan pada 2 periode, periode pertama dilakukan pada awal tahun 2012 dan yang kedua pada tahun 2013.Berikut ini adalah tabel pengujian yang dilakukan.
88 92
96 96
100 100 100 100 100 100 100
82 84 86 88 90 92 94 96 98 100 102 1 6 -2 2 J a n u a ri 2 3 -2 9 J a n u a ri 3 0 J a n u a ri -5 … 1 3 -1 9 F e b ru a ri 2 0 -2 6 F e b ru a ri 2 7 F e b ru a ri – 4 … 5 – 8 M a re t 5 – 1 1 M a re t 1 2 – 1 8 M a r e t 1 9 -2 5 M a re t 2 6 M a re t – 2 A p ri l P E R S E N T A S E K E B E R H A S IL A N %
LAM A PERCOBAAN (BULAN)
Asrul Rizal Ahmad Padilah, Taufiq Nuzwir Nizar
6
Gambar 11. Grafik persentase pengujian robot pada tahun 2012
Gambar 12. Grafik waktu tempuh robot pada tahun 2012
Pada tahun 2012 dilakukan pengujian sebanyak 341 kali percobaan dengan memiliki persentase keberhasilan 97% dengan kecepatan rata - rata 16,36 detik. Pada tahun 2012 robot ini diikutsertakan pada kompetisi robot di ajang Robogames 2012 pada kategori Walker Challenge dan meraih Gold Medal.
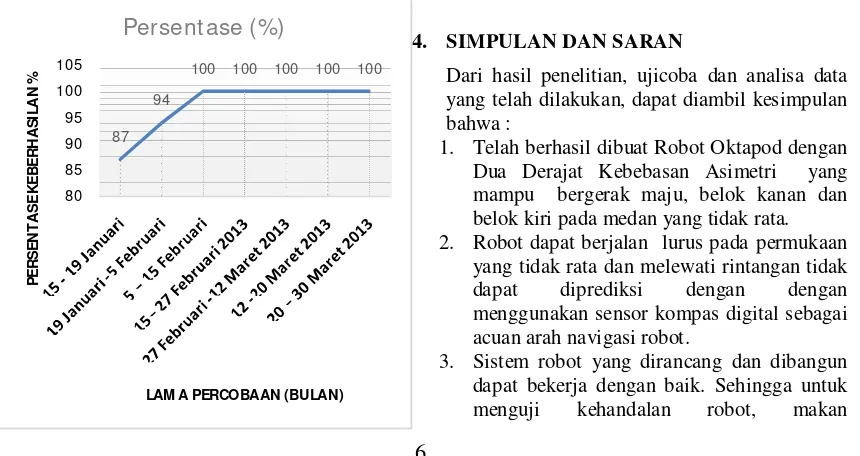
Gambar 13. Grafik persentase pengujian robot pada tahun 2013
Gambar 14. Grafik waktu tempuh robot pada tahun 2013
Pada tahun 2013 robot diuji kembali sebanyak 74 kali percobaan dengan persentase keberhasilan 97.29% dan kecepatan rata – rata 14.01 detik. Dimana kecepatan robot lebih cepat dibandingkan tahun sebelumnya. Pada tahun 2013 diikutsertakan kembali pada ajang Robogames 2013 untuk kategori Walker Challenge dan meraih Silver Medal.
4. SIMPULAN DAN SARAN
Dari hasil penelitian, ujicoba dan analisa data yang telah dilakukan, dapat diambil kesimpulan bahwa :
1. Telah berhasil dibuat Robot Oktapod dengan Dua Derajat Kebebasan Asimetri yang mampu bergerak maju, belok kanan dan belok kiri pada medan yang tidak rata. 2. Robot dapat berjalan lurus pada permukaan
yang tidak rata dan melewati rintangan tidak dapat diprediksi dengan dengan menggunakan sensor kompas digital sebagai acuan arah navigasi robot.
3. Sistem robot yang dirancang dan dibangun dapat bekerja dengan baik. Sehingga untuk menguji kehandalan robot, makan
16,2616,3116,33 16,18 16,56 16,27 16,12 16,3616,40 16,05 16,19 15,70 15,80 15,90 16,00 16,10 16,20 16,30 16,40 16,50 16,60 1 6 -2 2 J a n u a ri 2 3 -2 9 J a n u a ri 3 0 J a n u a ri -5 F e b ru a ri 1 3 -1 9 F e b ru a ri 2 0 -2 6 F e b r u a ri 2 7 F e b ru a ri – 4 M a re t 5 – 8 M a r e t 5 – 1 1 M a re t 1 2 – 1 8 M a re t 1 9 -2 5 M a re t 2 6 M a re t – 2 A p ri l W A K T U K IN E R JA R O B O T S A A T P E N G U JI A N ( D E T IK )
LAM A PERCOBAAN (BULAN)
Pengujian pada t ahun 2012 Wakt u Rat a - rat a
87 94
100 100 100 100 100
80 85 90 95 100 105 P E R S E N T A S E K E B E R H A S IL A N %
LAM A PERCOBAAN (BULAN)
Persent ase (%)
14,17 14 13,93 14,2 13,97 14,36 14,07 13,70 13,80 13,90 14,00 14,10 14,20 14,30 14,40 W A K T U K IN E R JA R O B O T S A A T P E N G U JI A N ( D E T IK )
LAM A PERCOBAAN (BULAN)
PERANCANGAN ROBOT OKTAPOD DENGAN DUA DERAJAT KEBEBASAN ASIMETRI
7
diikutsertakan sebuah pertandingan robot di ajang Robogames pada kategori Walker Challenge. Pada tahun 2012 robot ini meraih gold medal, serta pada tahun 2013 diikutsertakankembali dengan memperoleh silver medal pada kategori yang sama. 4. Perlu di tambahkan beberapa sensor dan
kamera untuk memonitoring lingkungan sekitar secara waktu nyata ( realtime ).
5. DAFTAR PUSTAKA
[1] Malvino. (2001). Prinsip – Prinsip Elektronik, Edisi kedua. Jakarta: PT.
Erlangga.
[2] Moh. Ibnu Malik, ST. (2006). Pengantar Membuat Robot. Yogyakarta
: Gava Media.
[3] Peraturan pertandingan Robogames pada kategori Walker Challenge. http://robogames.net/rules/walker.php
(diakses tanggal 5 November 2011) [4] Schilling Robert J. (1990). Fundamental
Of Robotic Analysis dan Control. Englewood Cliffs. Prentice Hall. [5] ServoCity™. Diakses pada 13
Desember 2011 dari:
http://www.servocity.com/html/how_do _servos_work_.html .
[6] Engineers Gerage Inspiring Creation. http://www.engineersgarage.com/article s/servo-motor?page=3 ( diakses pada 8 Januari 2012 )