DENGAN PENGENALAN POLA BENTUK DAN WARNA
MENGGUNAKAN WEBCAM
(Skripsi)
Oleh
RUDI HASUDUNGAN HUTABARAT
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
ABSTRACT
DESIGN AND REALIZATION OF CONVEYOR TO SORT ITEM USING PATTERN RECOGNITION OF SHAPE AND COLOR WITH WEBCAM
By
Rudi Hasudungan Hutabarat
In this paper designed development conveyor to sort the items, where items to be sorted will recognized their pattern. The research is an continuation of the previous research that designed a conveyor to distinguish the shape and length of beams using ultrasonic sensor. The design of conveyor can recognize the pattern of circular and oval or not either. After pattern recognized, then the color will be recognize too, so the conveyor can recognize an items based pattern of shape and color that may be subject to further action, the items are passed or discarded.
The method used for identifying shape an object is calculated value of matrix, if matrix have been obtained then classified into category matrix circle or oval. In color recognition method calculation used Hue of an image, when value of pixel have been obtained then the image can be classified by color.
Sorting items successfully carried out accordance given initialization, when initialization given is oval shape then oval shaped object to be passed, and otherwise it will be discarded. It is also common in sorting colored object, if given the red initialization object that has a red color to be passed otherwise it will be discarded. Obtained an error rate 10% on recognition of a circular shape, 10% on recognition of an oval shape, 0% on recognition of the color red, 10% green color recognition and 10% on recognition of yellow.
ABSTRAK
RANCANG BANGUN KONVEYOR PENYORTIRAN BARANG DENGAN PENGENALAN POLA BENTUK DAN WARNA MENGGUNAKAN
WEBCAM
Oleh
Rudi Hasudungan Hutabarat
Pada penelitian ini dirancang sebuah konveyor yang dapat menyortir sebuah barang, dimana barang yang akan disortir dikenali terlebih dahulu polanya. Penelitian ini merupakan lanjutan dari penelitian sebelumnya yakni membuat konveyor yang membedakan bentuk dan panjang sebuah balok menggunakan sensor ulrasonik. Perancangan konveyor yang akan dibuat dapat mengenali pola bentuk lingkaran, dan pola oval atau bukan keduanya. Setelah pola bentuk dikenali, maka pola warna juga akan dikenali sehingga konveyor tersebut dapat mengenali sebuah benda berdasarkan pola bentuk dan pola warna sehingga dapat dikenakan tindakan lebih lanjut, yakni barang barang tersebut diloloskan atau dibuang. Metode yang digunakan pada pengenalan pola bentuk adalah menghitung nilai matriks pada citra, apabila nilai matriks telah diperoleh selanjutnya mengklasifikasikan citra tersebut ke kategori matriks lingkaran atau oval. Pada pengenalan pola warna digunakan metode perhitungan nilai Hue dari sebuah citra, apabila telah diketahui nilai pikselnya maka citra dapat diklasifikasikan warnanya. Penyortiran barang berhasil dilakukan sesuai dengan inisialisasi yang diberikan, apabila inisialisasi bentuk oval yang diberikan maka objek yang berbentuk oval akan diloloskan dan selain itu akan dibuang. Hal serupa juga terjadi pada penyortiran objek berwarna, apabila inisialisasi warna merah diberikan maka objek yang memiliki warna merah akan diloloskan selain itu akan dibuang. Diperoleh galat sebesar 10% pada pengenalan bentuk lingkaran, 10% pada pengenalan bentuk oval, 0% pada pengenalan warna merah, 10% pada pengenalan warna hijau dan 10% pada pengenalan warna kuning.
lr*"
ror*,
orrornu,
,ru
'!-g'q
'!@t
JvDlltrustr
;(il2,
-.:r,-4//L
",
41.,1r;,"t
'''n
''"*''orns
"r4su
Ps
rl
rq
:L--,.
gn0
Eunduei sqlsra un
rlurb.L'o
qanl.}l
1I.S
oruEs.llr
6r6v
I6[f'H
'qefltuaN
rtuf,
,t
I!lnDual
q.to
unqlf
lLrt!sd!$,{tl,lt
tnd
oplrr',,in.ur.nrs nr! urL:S ULr)sil r.xep
uPr,f
r0rrj!n(tis,r
'F:,u:l0fi
rmurirq:s
nr' L,ct.nu'.rnnrnlirslt!rir rrp.i\
,
r).\
rtr,Liu|r1),trtr ucjrqr:iLp nqps'[r piu[,i
n:dr|ErtulnD]|':Orl
l|i.]l|!ir
'tupn Dinl r,(.s r'xtrt.1.!iu.d
iorll.d.s
n.|)[rrt
;up
Lt.tr)lu)f]Flrp
riDuron)iaE
IFlrtrI
uE6runaEhlay z
100
I
z01666l
tt90096r6l
dtN,6uA'I{
'qE|IrueENrrEs
rr
Eulqurlqtrl5J
tstuo! .I
lofoffuNsI,lI
ezormsrm
slnlq.l
uEsrunt
sdEseq4t
tolod
r(jeN
dINIr.lr0rFli
uD0unPisDli
l|QI)
,rtarrrrrl
IIVYYNODIrMII4IYNUyllt
NYqmIl|qs
rytod N'trIYNiloNat
tItDNAq
9[ItIf,tC
NlltIIf,
OINSJ
lloitlaNoy
tIoDN9s
DrIlarNtIS
IOO Z
ZIS66I
[ZOI
DAFTAR GAMBAR
Gambar Halaman
2.1.Blok diagram arsitektur mikrokontroler ATmega8535 ... 6
2.2. Pin ATmega8535 ... 8
2.3. Peta Memori data AVR ATmega8535 ... 9
2.4. Peta Memori Program AVR ATmega8535 ... 10
2.5. Webcam... 11
2.6. Citra burung nuri... 13
2.7. Citra lingkaran ... 14
2.8. Citra berwarna ... 15
2.9. Citra grayscale ... 16
2.10. Citra biner ... 16
2.11. Citra awal RGB... 18
2.12. Citra biner awal... 19
2.13. Citra hasil region filling ... 19
2.14. Citra hasil perlakuan boundary ... 20
2.15. Warna HSV ... 21
2.16. Motor DC ... 23
2.17. Konektor DB-9 ... 24
3.3. Simulasi pengiriman karakter “l” dan “m” ... 29
3.4. Blok sistem kendali... 30
3.5. Diagram alir perancangan alat ... 31
3.6. Blok diagram sistem ... 32
3.7. Perancangan perangkat sistem konveyor ... 32
3.8. Tampilan awal Matlab 2011a ... 33
3.9. Tampilan pada pembuatan panel kontrol GUI... 34
3.10. Tampilan pada CodeVision AVR ... 34
3.11. Tampilan pada Khazama AVR ... 35
3.12. Diagram alir motor konveyor ... 35
3.13. Diagram alir motor lengan buang ... 36
3.14. Diagram proses pengenalan bentuk ... 37
3.15. Tampilan jendela kamera ... 38
3.16. Tampilan untuk inisialisasi pengenalan bentuk ... 40
3.17. Diagram proses pengenalan warna ... 40
3.18.Tampilan inisialisasi pengenalan warna ... 42
3.19.Tampilan panel kontrol ... 43
3.20.Rangkain mikrokontroller ... 44
3.21.Rangkain catu daya ... 44
3.22.Driver relay pada motor lengan buang ... 45
3.23.Driver relay pada motor konveyor ... 45
4.3. Rangkaian driver relay motor konveyor ... 51
4.4. Rangkaian H-Bridge ... 52
4.5. LED penerang ... 53
4.6. Citra hasil capture kamera ... 54
4.7. (a) Tampilan tidak ada objek ... 55
(b) Ada objek ... 56
4.8. (a) Data serial belum dikirim ... 56
(b) Data serial dikirim ... 56
4.9. Citra berwarna dan citra abu-abu ... 64
4.10. Citra awal dan citra inversnya ... 64
4.11. Citra dengan hasil penapisan dan perbaikan ... 65
4.12. Citra dengan border dan nilai matriksnya ... 65
4.13. Citra awal rgb dan citra hasil hsv ... 68
4.14. Citra dengan komponen penyusun nilai hsv ... 69
4.15. Kesalahan pada pengenalan oval ... 71
4.16. Kesalahan pada pengenalan lingkaran ... 72
4.11.Citra lingkaran yang terpotong ... 73
4.12.Citra oval yang terpotong ... 73
DAFTAR ISI
halaman DAFTAR ISI
DAFTAR GAMBAR DAFTAR TABEL DAFTAR GAMBAR
I. PENDAHULUAN
A. Latar Belakang ... 1
B. Tujuan Penelitian ... 2
C. Manfaat Penelitian ... 2
D. Rumusan Masalah ... 3
E. Batasan Masalah ... 3
F. Hipotesis ... 3
II. TINJAUAN PUSTAKA A. Mikrokontroler AVR ... 4
B. Webcam ... 10
C. Pengolahan Citra ... 11
D. Pengolahan Warna ... 20
E. Pengenalan Pola ... 21
F. Konveyor ... 22
III. METODE PENELITIAN
A. Tempat dan Waktu Penelitian ... 26
B. Spesifikasi Alat dan Simulasi ... 26
1. Spesifikasi alat ... 26
2. Simulasi ... 29
C. Tahap-Tahap Dalam Pembuatan Tugas Akhir ... 30
1. Perancangan Sistem Alat ... 30
2. Pembuatan Sistem Alat ... 36
3. Pengujian Alat ... 46
4. Analisis dan Kesimpulan ... 47
5. Pembuatan Laporan ... 47
IV. HASIL DAN PEMBAHASAN A. Prinsip Kerja Alat ... 48
B. Pengujian Alat ... 49
1. Pengujian Perangkat Keras ... 50
2. Pengujian Perangkat Lunak ... 53
C. Data Hasil Percobaan ... 57
1. Deteksi Pola Bentuk Oval ... 57
2. Deteksi Pola Bentuk Lingkaran ... 58
3. Deteksi Pola Warna Merah... 59
4. Deteksi Pola Warna Hijau ... 60
2. Deteksi Warna ... 66
3. Pengenalan Bentuk dan Warna... 70
4. Galat pada Pengujian ... 71
V.KESIMPULAN DAN SARAN
A. Kesimpulan ... 78
B. Saran ... 78
DAFTAR PUSTAKA
DAFTAR TABEL
Tabel Halaman
1.1. Tabel Penelitian ... 2
2.1. Konfigurasi pin dan nama sinyal ... 24
3.1. Alat dan bahan ... 26
4.1. Hasil pengukuran menggunakan multimeter ... 51
4.2. Hasil pengukuran pada rangkaian motor konveyor ... 51
4.3. Hasil pengukuran rangkaian H-Bridge ... 52
4.4. Hasil pengukuran rangkaian LED ... 53
4.5. Pengujian respon kamera ... 55
4.6. Hasil percobaan dengan inisialisasi oval ... 57
4.7. Hasil percobaan dengan inisialisasi lingkaran ... 58
4.8. Hasil percobaan dengan inisialisasi warna merah ... 59
4.9. Hasil percobaan dengan inisialisasi warna hijau ... 60
4.10. Hasil percobaan dengan inisialisasi warna kuning ... 61
4.11. Range matriks bentuk ... 63
4.12. Nilai matriks lingkaran dan matriks oval ... 63
4.13. Range piksel warna ... 67
4.14. Total piksel dari citra berwarna ... 67
4.18. Inisialisasi Warna Merah ... 75
4.19. Inisialisasi Warna Hijau ... 75
4.20. Inisialisasi Warna Kuning... 76
4.21. Standar deviasi lingkaran ... 76
I. PENDAHULUAN
A. Latar Belakang Masalah
Dalam dunia industri pencapaian proses produksi membutuhkan devais-devais
yang memudahkan para karyawan untuk melakukan aktivitas. Salah satu devais
yang sering dijumpai adalah konveyor yang dapat membawa produk dari satu
tempat ke tempat lain. Merujuk dari asal kata konveyor yaitu konvoi
(iring-iringan), maka proses pengangkutan barang tersebut dilakukan secara konvoi yang
berarti berurutan.
Pada tugas akhir ini dirancang konveyor yang dapat menyortir sebuah barang,
dimana barang yang akan disortir dikenali terlebih dahulu polanya. Tugas akhir
ini merupakan lanjutan dari tugas akhir sebelumnya yaitu konveyor yang
dirancang dapat membedakan bentuk dan panjang sebuah balok menggunakan
sensor ulrasonik. Perancangan konveyor yang akan dibuat dapat mengenali pola
tertentu yakni menggunakan pola bentuk lingkaran, dan pola oval atau bukan
keduanya. Setelah pola bentuk dikenali, maka pola warna juga akan dikenali
sehingga konveyor tersebut dapat mengenali sebuah benda berdasarkan pola
bentuk dan pola warna sehingga dapat dikenakan tindakan lebih lanjut, yakni
barang barang tersebut diloloskan atau dibuang. Proses pengenalan pola barang
diproses dengan teknik pengenalan pola yang merupakan salah satu bagian dari
teknik pengolahan citra.
Timeline dari penelitian yang berkaitan dapat dilihat pada Tabel 1.1:
Tabel 1.1. Tabel Penelitian
No Nama-NPM Tahun Judul Penelitian
1 Kurnia Ramdhani (0315031066) 2010 Rancang Bangun Prototipe Sistem Pengendalian Konveyor Penyortiran dan Pengisian Barang Berbasis PLC
2 Ali Ma’ruf (0515031030) 2011 Rancang Bangun Prototipe Sistem Pemilahan Produk Kemasan Kotak Tiga Dimensi Berbasis Mikrokontroler ATmega8
3 Rudi Hasudungan H (0815031026) Proses Rancang Bangun Konveyor Penyortiran Barang dengan Pengenalan Pola Bentuk dan Warna Menggunakan
Webcam
B. Tujuan Penelitian
Tujuan penelitian adalah membuat sebuah prototipe konveyor yang dapat
memisahkan barang berdasarkan pola bentuk dan pola warna barang
menggunakan sensor webcam.
C. Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah:
1. Menjadi salah satu solusi pada dunia industri terutama pada sistem konveyor
yang dapat mengenali pola bentuk dan warna yang diinginkan.
2. Dapat digunakan untuk penelitian selanjutnya.
3. Mengetahui teknik pengenalan pola menggunakan sensor kamera yang
nantinya dapat digunakan secara lebih luas untuk tugas-tugas akhir
D. Rumusan Masalah
Rumusan masalah pada penelitian ini adalah sebagai berikut:
1. Bagaimana merancang sebuah konveyor yang dapat mengenali pola bentuk
dan warna barang.
2. Bagaimana menerapkan sensor kamera webcam Logitech C110 sebagai
devais pengindra yang nantinya digunakan sebagi devais pada pengenalan
pola bentuk.
3. Bagaimana menerapkan sensor kamera webcam Logitech C110 sebagai
devais pengindra yang nantinya digunakan sebagi devais pada pengenalan
warna.
E. Batasan Masalah
Dalam penelitian ini dilakukan pembatasan terhadap masalah yang akan dibahas
yaitu:
1. Pola bentuk yang dapat dikenali yaitu pola lingkaran, pola oval dan bukan
keduanya dengan warna permukaan hitam.
2. Pola warna yang dikenali yaitu warna primer seperti merah, kuning dan hijau.
3. Sensor yang digunakan adalah webcam Logitech C110 sebagai devais
pengindra..
4. Mikrokontroller Atmega 8535 sebagai pengendali utama konveyor.
5. Software yang digunakan untuk pengenalan pola adalah Matlab R2011a.
F. Hipotesa
Dengan menggunakan sebuah webcam Logitech C110 maka konveyor dapat
melakukan pemisahan barang berdasarkan pengenalan pola bentuk dan warna
II. TINJAUAN PUSTAKA
A. Mikrokontroller AVR
1. Arsitektur Mikrokontroller AVR
Mikrokontroler AVR (Alf and Vegard’s Risc processor) merupakan
mikrokontroler keluaran Atmel, yang mempunyai arsitektur RISC 8 bit, di mana
semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi
dieksekusi dalam 1 siklus clock, berbeda dengan instruksi MCS51 yang
membutuhkan 12 siklus clock. Tentu saja itu terjadi karena kedua jenis
mikrokontroler tersebut memiliki arsitektur yang berbeda. AVR berteknologi
RISC (reduced Instruction set computing), sedangkan seri MCS51 berteknologi
CISC (complex Instruction set computing). Secara umum, AVR dapat
dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx,
keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan
masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan
instruksi yang digunakan, mereka bisa dikatakan hampir sama.
Diagram blok arsitektur mikrokontroler tipe ATmega8535 ditunjukkan pada
Gambar 2.1. Dari gambar tersebut dapat dilihat bahwa ATmega8535 memiliki
bagian sebagai berikut:
b) ADC 10 bit sebanyak 8 saluran yang terletak pada port A.
c) Tiga buah Timer/Counter dengan kemampuan pembanding yang terletak di
bagian kanan atas Gambar 2.1.
d) CPU yang terdiri atas 32 buah register.
e) Watchdog Timer dengan osilator internal terletak di bagian tengah kanan
Gambar 2.1.
f) SRAM sebesar 512 byte yang terletak di bagian tengah kiri atas Gambar 2.1.
g) Memori Flash sebesar 8 KB dengan kemampuan read while write.
h) Unit interupsi internal dan eksternal terletak di bagian tengah kanan bawah
Gambar 2.1.
i) Port antarmuka SPI yang terletak di bagian tengah kiri bawah Gambar 2.1.
j) EEPROM sebanyak 512 byte yang dapat diprogram saat operasi terletak di
bagian tengah kanan bawah Gambar 2.1.
k) Antarmuka komparator analog yang terletak di bagian tengah bawah kiri
Gambar 2.1.
2. Fitur ATmega8535
Kapabilitas rinci dari ATmega8535 adalah sebagai berikut:
1) Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16
MHz.
2) Kapabilitas memori flash 8 Kb, SRAM sebesar 512 byte, dan EEPROM
sebesar 512 byte.
3) ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4) Port komunikasi serial (USART) dengan kecepatan 2,5 Mbps.
5) Enam pilihan mode sleep menghemat penggunaan daya listrik.
3. Konfigurasi Pin ATmega8535
Konfigurasi pin ATmega8535 bisa dilihat pada Gambar 2.2 yang secara
fungsional konfigurasi pin ATmega8535 sebagai berikut:
1) VCC merupakan pin yang berfungsi sebagai pin masukan daya.
2) GND merupakan pin ground.
3) Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4) Port B (PB0...PB7) merupakan pin I/O dua arah dan pin fungsi khusus,
yaitu Timer/Counter, komparator analog, dan SPI.
5) Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
TWI, komparator analog, dan Timer Oscilator.
6) Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
komparator analog, interupsi eksternal, dan komunikasi serial.
8) XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9) AVCC merupakan pin masukan tegangan untuk ADC.
10) AREF merupakan pin masukan tegangan referensi ADC.
Gambar 2.2 Pin ATmega8535.
4. Peta Memori
AVR ATmega8535 memiliki ruang pengalamatan memori data dan memori
program yang terpisah. Memori data terbagi menjadi 3 bagian yaitu 32 buah
register file, 64 buah register I/O, dan 512 byte SRAM internal.
Register file menempati space data pada alamat terbawah yaitu $00 sampai $1F.
Sementara itu, register khusus untuk menangani I/O dan kontrol terhadap
mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $5F. Register
tersebut merupakan register yang khusus digunakan untuk mengatur fungsi
terhadap berbagai peripheral mikrokontroler, seperti control register,
digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F.
Konfigurasi memori data ditunjukkan pada Gambar 2.3.
Gambar 2.3 Peta Memori data AVR ATmega8535.
Memori program yang terletak dalam flash EPROM tersusun dalam word atau 2
byte karena setiap instruksi memiliki lebar 16-bit atau 32-bit. AVR ATmega8535
memiliki 4 KB x 16-bit flash EPROM dengan alamat mulai dari $000 sampai
$FFF. AVR tersebut memiliki 12-bit program counter (PC) sehingga mampu
Gambar 2.4 Peta Memori Program AVR ATmega8535.
Selain itu, AVR ATmega8535 juga memiliki memori data berupa EEPROM 8-bit
sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF (gambar
2.4).
B. Webcam
Webcam adalah kamera video sederhana berukuran relatif kecil, sering digunakan
untuk konferensi video jarak jauh atau sebagai kamera pemantau. Webcam pada
umumnya tidak membutuhkan kaset atau tempat penyimpanan data, data hasil
perekaman yang didapat langsung ditransfer ke komputer.
Defenisi yang lain tentang Webcam adalah sebuah periferal berupa kamera
sebagai pengambil citra atau gambar dan mikrofon (optional) sebagai pengambil
suara yang dikendalikan oleh sebuah komputer atau oleh jaringan komputer.
Gambar yang diambil oleh Webcam ditampilkan ke layar monitor, karena
dikendalikan oleh komputer maka ada interface atau port yang digunakan untuk
Gambar 2.5 Webcam
[http://e-dukasi.net/]
C. Pengolahan Citra 1. Defenisi Citra
Citra adalah gambar dua dimensi yang dihasilkan dari gambar analog dua dimensi
yang kontinyu menjadi gambar diskrit melalui proses sampling. Citra digital dapat
didefinisikan sebagai fungsi dua variabel, f(x,y). Di mana x dan y adalah
koordinat spasial sedangkan nilai f(x,y) adalah intensitas citra pada koordinat
tersebut. Teknologi dasar untuk menciptakan dan menampilkan warna pada citra
digital berdasarkan pada penelitian bahwa sebuah warna merupakan kombinasi
dari tiga warna dasar, yaitu merah, hijau dan biru (Red, Green, Blue - RGB).
Dasar dari pengolahan citra adalah pengolahan warna RGB pada posisi tertentu.
Dalam pengolahan citra warna direpresentasikan dengan nilai heksadesimal dari
0x00000000 sampai 0x00ffffff. Warna hitam adalah 0x00000000 dan warna putih
adalah 0x00ffffff. Definisi nilai warna di atas dapat dijelaskan seperti di bawah
ini, variabel 0x00 menyatakan angka dibelakangnya adalah heksadesimal.
2. Defenisi Pengolahan Citra
Meskipun sebuah citra kaya informasi namun seringkali citra yang kita miliki
mengalami penurunan mutu (degradasi), misalnya mengandung cacat atau derau
(noise), warnanya terlalu kontras, kurang tajam, kabur (blurring) dan sebagainya.
Tentu saja citra semacam ini menjadi lebih sulit diinterpretasi karena informasi
yang disampaikan oleh citra tersebut menjadi berkurang. Agar citra yang
mengalami gangguan mudah diinterpretasi (baik oleh manusia maupun mesin),
maka citra tersebut perlu dimanipulasi menjadi citra lain yang kualitasnya lebih
baik. Bidang studi yang menyangkut hal ini adalah pengolahan citra (image
processing).
Pengolahan citra adalah pemrosesan citra khususnya dengan menggunakan
komputer menjadi citra yang kualitasnya lebih baik. Operasi-operasi pada
pengolahan citra diterapkan pada citra bila:
a). Perbaikan atau memodifikasi citra perlu dilakukan untuk meningkatkan
kualitas penampakan atau untuk menonjolkan beberapa aspek informasi yang
terkandung di dalam citra.
b). Elemen di dalam citra perlu dikelompokkan, dicocokkan, atau diukur.
(a) (b)
Gambar 2.6(a) Citra burung nuri yang agak gelap
(b) Citra burung yang diperbaiki kontrasnya sehingga jelas
3. Jenis-Jenis Citra
Terdapat beberapa jenis citra yang umum digunakan dalam pengolahan citra yaitu
3.1Citra Digital
Citra digital tersusun dari suatu bilangan digital yang merepresentasikan intensitas
cahaya diwakili array 2 dimensi di titik tertentu dalam suatu kisi. Titik dalam kisi
2 dimensi dinamakan piksel atau pel yang merupakan singkatan dari kata picture
element. Sebuah piksel mewakili elemen lokasi dan nilai intensitas sehingga
mengandung informasi yang menggambarkan fenomena fisis yang direkamnya.
Pada Gambar 2.7 (a) adalah sebuat citra digital dengan format grayscale, pada
Gambar 2.7 (b) dapat dilihat nilai matriks dari citra tersebut yang memiliki
resolusi 8x9 dan pada Gambar 2.7(c) adalah nilai matriks citra dengan format
biner karena memiliki nilai piksel 1 dan 0. Posisi piksel dinotasikan dalam bentuk
matriks M x N. Indeks pertama M menunjukkan posisi baris, yang kedua N
menunjukkan posisi kolom. Jika citra digital berisi piksel M x N maka indeks N
mulai dari 0 sampai N-1 dan indeks M mulai dari 0 sampai M-1. M merupakan
(a)
(b)
(c)
Gambar 2.7 (a) Citra lingkaran 8x9 (b) Nilai matriks citra grayscale (c) Nilai matriks citra biner
vertikal (sumbu y) dihitung dari atas ke bawah tidak seperti pada grafik dari
bawah ke atas dan sumbu horizontal (sumbu x) berjalan seperti biasa dari kiri ke
kanan. [Wicaksono, 2012]
3.2Citra Berwarna
Merupakan citra yang nilai pikselnya merepresentasikan warna tertentu, seperti
merah, kuning atau biru. Banyaknya warna yang mungkin digunakan bergantung
kepada kedalaman piksel citra yang bersangkutan. Citra berwarna
direpresentasikan dalam beberapa kanal (channel) yang menyatakan
komponen-komponen warna penyusunnya. Banyaknya kanal yang digunakan bergantung
Gambar 2.8 Citra berwarna
Intensitas suatu titik pada citra berwarna merupakan kombinasi dari tiga
intensitas: derajat keabuan merah (fmerah(x,y)), hijau fhijau(x,y) dan biru
(fbiru(x,y)). Persepsi visual citra berwarna umumnya lebih kaya dibandingkan
dengan citra hitam putih. Citra berwarna menampilkan objek seperti warna aslinya
(meskipun tidak selalu tepat demikian). Warna-warna yang diterima oleh mata
manusia merupakan hasil kombinasi cahaya dengan panjang gelombang berbeda.
3.3Citra Grayscale
Merupakan citra yang nilai pikselnya merepresentasikan derajat keabuan atau
intensitas warna putih. Nilai intensitas paling rendah merepresentasikan warna
hitam dan nilai intensitas paling tinggi merepresentasikan warna putih. Pada
umumnya citra grayscale memiliki kedalaman piksel 8 bit (256 derajat keabuan),
tetapi ada juga citra grayscale yang kedalaman pikselnya bukan 8 bit, misalnya 16
Gambar 2.9 Citra grayscale
3.4Citra Biner
Citra biner diperoleh melalui proses pemisahan piksel-piksel berdasarkan 2 warna,
yaitu hitam dan putih. Piksel yang memiliki warna putih bernilai 0, sementara
piksel yang berwarna hitam bernilai 1. Oleh karena itu, setiap piksel pada citra
biner cukup direpresentasikan dengan 1 bit.
Gambar 2.10 Citra biner
4. Operasi Pada Pengolahan Citra
Ada banyak operasi pada pengolahan citra tetapi yang akan dibahas adalah operasi
yang terkait tugas akhir ini yaitu operasi binerisasi, operasi morfologi, analisis dan
[image:30.595.239.388.420.594.2]4.1Binerisasi
Seperti yang telah kita ketahui sebelumnya bahwa untuk 1 warna pada citra RGB
itu mengandung nilai yang besar, yaitu dari 0 – 255. Jika kita langsung mengolah
citra yang nilainya besar ini maka akan dibutuhkan waktu pemrosesan yang
cukup lama. Oleh karena itu, untuk menghemat waktu dan juga penggunaan
memori komputer kita maka citra yang akan kita olah ini harus terlebih dahulu
diubah ke dalam nilai yang lebih sederhana, sehingga proses pengolahan citra
bisa cepat dilakukan. Dalam hal ini yang perlu kita lakukan adalah operasi
binerisasi. Pada operasi binerisasi warna citra diubah ke tingkat level keabuan
(grayscale) terendah, yang berarti citra hanya mengandung informasi putih (bit 1)
dan hitam (bit 0) pada piksel-piksel penyusunnya. Selain itu, sifat-sifat biner
umumnya lebih sederhana, cepat dan mudah diimplementasikan.
Operasi binerisasi ini menggunakan metode global thresholding. Di mana sebuah
citra akan diubah nilai intensitas warna di setiap pikselnya berdasarkan nilai
threshold (ambang batas) yang telah ditentukan. Jika intensitas piksel lebih besar
dari ambang batasnya maka intensitas piksel tersebut akan berubah menjadi
warna putih (bit 1). Sebaliknya jika intensitasnya lebih kecil dari ambang batas
yang ada maka intensitas piksel tersebut akan berubah menjadi warna hitam
(bit 0). [Wicaksono, 2012]
Secara matematis proses binerisasi dapat diformulasikan pada persamaan (1)
berikut:
(1) f(x,y) = intensitas citra
Pada Gambar 2.11 memperlihatkan proses binerisasi pada sebuah citra.
(a) (b)
Gambar 2.11 (a) Citra awal RGB (b) Citra hasil binerisasi
4.2Operasi Morfologi
Operasi morfologi adalah teknik pengolahan citra yang didasarkan pada bentuk
segmen atau region dalam citra. Operasi difokuskan pada bentuk objek dan
biasanya diterapkan pada citra biner. Biasanya dengan membedakan antara objek
dan latar, antara lain dengan memanfaatkan operasi pengambangan yang
mengubah citra warna dan skala keabuan menjadi citra biner. Hasil operasi
morfologi dapat dimanfaatkan untuk pengambilan keputusan dengan analisis lebih
lanjut. Operasi morfologi citra ada beberapa jenis yakni dilatasi, erosi, opening,
closing, thinning, shrinking, pruning, skeletonizing dan thickening tetapi yang
akan dibahas adalah operasi closing karena operasi ini yang digunakan.
Operasi closing erat kaitan dengan dilasi dan erosi karena untuk melakukan
operasi ini mengacu pada nilai strel yang digunakan. Secara matematis operasi
closing diformulasikan sebagai berikut:
A ● B = (A B) Ө B (2)
Operasi closing A oleh B adalah operasi dilasi A oleh B, diikuti operasi erosi
(a) (b) (c)
Gambar 2.12 (a) Citra biner awal (b) Citra setelah morfolgi dengan acuan strel ‘disk’ ,1 (c) Citra setelah morfologi dengan acuan strel ‘disk’,5
Operasi region filling digunakan untuk mengisi bagian dari piksel yang bernilai 1
menjadi 0. Operasi ini menggunakan acuan berdasarkan nilai piksel tetangganya
seperti yang ditunjukkan pada Gambar 2.13.
(a) (b)
Gambar 2.13 (a) Citra awal (b) Citra hasil region filling
Dari Gambar 2.13 dapat dilihat bahwa sebuah citra awal yang memiliki sebuah
lubang (hole) dapat dihilangkan dengan operasi region filling.
4.3Analisis dan Statistik Citra
Boundary citra adalah sebuah teknik untuk memberikan border atau wilayah
Operasi ini hanya bisa dikerjakan dalam ranah citra biner yang memiliki nilai
piksel 1 dan 0.
(a) (b)
Gambar 2.14 (a) Citra awal (b) Citra hasil perlakuan boundary
Dari Gambar 2.14 dapat dilihat hasil citra setelah diberikan boundaries, teknik ini
berfungsi untuk memberikan batas terhadap sebuah objek untuk dapat dihitung
jumlah piksel atau matriks berdasarkan batas area yang diberikan.
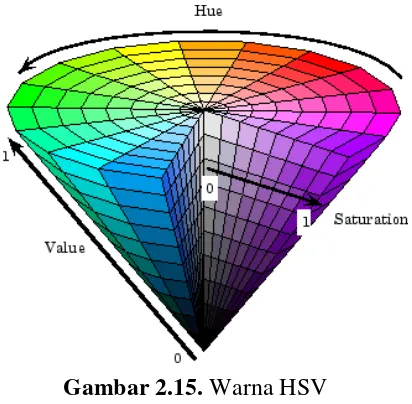
D. Pengolahan Warna 1. HSV
Model warna HSV mendefinisikan warna dalam terminologi Hue, Saturation dan
Value. Hue menyatakan warna sebenarnya, seperti merah, violet, dan kuning. Hue
digunakan untuk membedakan warna-warna dan menentukan kemerahan
(redness), kehijauan (greeness), dan sebagainya dari cahaya. Hue berasosiasi
dengan panjang gelombang cahaya. Saturation menyatakan tingkat kemurnian
suatu warna, yaitu mengindikasikan seberapa banyak warna putih diberikan pada
warna. Value adalah atribut yang menyatakan banyaknya cahaya yang diterima
oleh mata tanpa memperdulikan warna. Karena model warna HSV merupakan
model warna yang diturunkan dari model warna RGB maka untuk mendapatkan
HSV merupakan salah satu cara untuk mendefinisikan warna yang didasarkan
pada roda warna. Hue mengukur sudut sekitar roda warna (merah pada 0 derajat,
120 derajat di hijau, biru, di 240 derajat). Saturation yang menunjukkan pada
radius roda warna sehingga menunjukkan proporsi antara gelap (pusat) untuk
warna ke putih murni (di luar), value menunjukkan nilai kecerahan. Hue memiliki
nilai antara 0 hingga 360 (derajat), Saturation and Value berkisar dari 0 hingga
[image:35.595.214.420.257.459.2]100%.
Gambar 2.15. Warna HSV
E. Pengenalan Pola
Sebuah pola adalah setiap antar hubungan data (analog atau digital), kejadian
atau konsep yang dapat dibedakan. Pengenalan pola merupakan bidang dalam
pembelajaran mesin dan dapat diartikan sebagai tindakan mengambil data mentah
dan bertindak berdasarkan klasifikasi data. Dengan demikian, pengenalan pola
merupakan himpunan kaidah bagi pembelajaran diselia (supervised learning).
Ada beberapa definisi lain tentang pengenalan pola, di antaranya:
a. Penentuan suatu objek fisik atau kejadian ke dalam salah satu atau beberapa
b. Ilmu pengetahuan yang menitikberatkan pada deskripsi dan klasifikasi
(pengenalan) dari suatu pengukuran.
c. Suatu pengenalan secara otomatis suatu bentuk, sifat, keadaan, kondisi,
susunan tanpa keikutsertaan manusia secara aktif dalam proses pemutusan.
Berdasarkan beberapa definisi di atas, pengenalan pola dapat didefinisikan
sebagai cabang kecerdasan yang menitik-beratkan pada metode pengklasifikasian
objek ke dalam kelas-kelas tertentu untuk menyelesaikan masalah tertentu. Salah
satu aplikasinya adalah pengenalan suara, klasifikasi teks dokumen dalam
kategori (contoh. surat-E spam/bukan-spam), pengenalan tulisan tangan,
pengenalan kode pos secara otomatis pada sampul surat, atau sistem pengenalan
wajah manusia. Aplikasi ini kebanyakan menggunakan analisis citra bagi
pengenalan pola yang berkenaan dengan citra digital sebagai input ke dalam
sistem pengenalan pola.
F. Konveyor
Didalam industri, bahan-bahan yang digunakan kadangkala merupakan bahan
yang berat maupun berbahaya bagi manusia dan jarak perpindahan barang yang
cukup jauh. Untuk itu diperlukan alat transportasi untuk mengangkut bahan-bahan
tersebut mengingat keterbatasan kemampuan tenaga manusia baik itu berupa
kapasitas bahan yang akan diangkut maupun keselamatan kerja dari karyawan.
Salah satu jenis alat pengangkut yang sering digunakan adalah konveyor yang
berfungsi untuk mengangkut bahan-bahan industri yang berbentuk padat
[Ma’aruf, 2011].
Pemilihan alat transportasi (conveying equipment) material padatan antara lain
a. Kapasitas material yang ditangani.
b. Jarak perpindahan material.
c. Kondisi pengangkutan : horizontal atau vertikal.
d. Ukuran, bentuk dan sifat material.
e. Harga peralatan tersebut.
Secara umum jenis konveyor yang sering digunakan adalah conveyor belt.
Conveyor belt pada dasarnya merupakan peralatan yang cukup sederhana. Alat
tersebut terdiri dari sabuk yang tahan terhadap pengangkutan benda padat. Sabuk
yang digunakan pada conveyor belt ini dapat dibuat dari berbagai jenis bahan
misalnya dari karet, plastik, kulit ataupun logam yang tergantung dari jenis dan
sifat bahan yang akan diangkut. Untuk mengangkut bahan-bahan yang panas,
sabuk yang digunakan terbuat dari logam yang tahan terhadap panas.
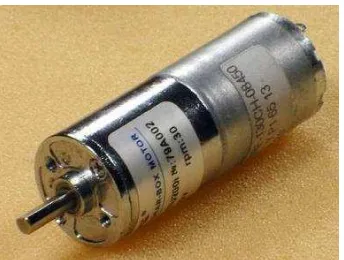
G. Motor DC
Motor DC atau motor arus searah adalah suatu mesin yang berfungsi mengubah
tenaga listrik arus searah menjadi tenaga gerak atau tenaga mekanik. Motor DC
digunakan pada penggunaan khusus dimana diperlukan penyalaan torsi yang
tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas. Torsi adalah
[image:37.595.228.400.584.714.2]putaran dari suatu gaya terhadap suatu poros.
Suatu motor arus searah akan berfungsi bila memiliki:
a. Kumparan medan untuk menghasilkan medan magnet.
b. Kumparan jangkar untuk mengimbas gaya gerak listrik pada
konduktor-konduktor yang terletak pada alur-alur jangkar.
c. Celah udara yang memungkinkan berputarnya jangkar dalam medan
magnet.
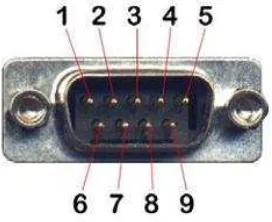
H. Komunikasi Serial
Pada komputer IBM PC kompatibel biasanya kita dapat menemukan dua konektor
port serial DB-9 yang biasanya dinamai COM1 dan COM2.
[image:38.595.249.385.334.445.2]Gambar 2.17 Konektor DB-9
Tabel 2.1 Konfigurasi pin dan nama sinyal
Pin Nama Status Deksripsi 1 CD Input Carrier Detect
2 RXD Input Receive Data
3 TXD Output Transmit Data
4 DTR Output Data Terminal Ready
5 GND -- System Ground
6 DSR Input Data Set Ready
7 RTS Output Request to Send
8 CTS Input Clear To Send
9 RI Input Ring Indicator
Penggunaan DB-9 pada komputer generasi baru yang sudah jarang digunakan,
konekor DB-9 yang dapat digunakan dengan ditambahkan perangkat tambahan
yaitu adapter serial DB-9 ke USB. Dengan menggunakan adapter serial DB-9 ke
serial pada komputer tidak dibatasi hanya COM1 atau COM2 saja tetapi
tergantung dari banyak USB yang tersedia pada komputer.
BAB III. METODE PENELITIAN
A.Tempat dan Waktu Penelitian
Penelitian dilakukan di Laboratorium Terpadu Teknik Elektro Universitas
Lampung, dari bulan September 2012 – April 2013.
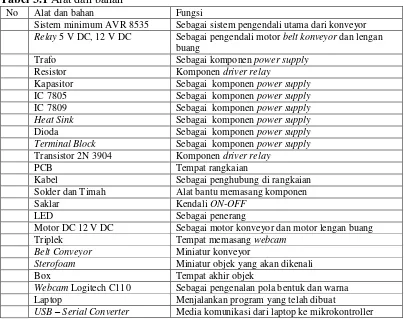
[image:40.595.113.518.396.715.2]B.Spesifikasi Alat dan Simulasi 1. Spesifikasi alat
Tabel 3.1 Alat dan bahan
No Alat dan bahan Fungsi
Sistem minimum AVR 8535 Sebagai sistem pengendali utama dari konveyor
Relay 5 V DC, 12 V DC Sebagai pengendali motor belt konveyor dan lengan buang
Trafo Sebagai komponen power supply
Resistor Komponen driver relay
Kapasitor Sebagai komponen power supply
IC 7805 Sebagai komponen power supply
IC 7809 Sebagai komponen power supply Heat Sink Sebagai komponen power supply
Dioda Sebagai komponen power supply Terminal Block Sebagai komponen power supply
Transistor 2N 3904 Komponen driver relay
PCB Tempat rangkaian
Kabel Sebagai penghubung di rangkaian Solder dan Timah Alat bantu memasang komponen Saklar Kendali ON-OFF
LED Sebagai penerang
Motor DC 12 V DC Sebagai motor konveyor dan motor lengan buang Triplek Tempat memasang webcam
Belt Conveyor Miniatur konveyor
Sterofoam Miniatur objek yang akan dikenali Box Tempat akhir objek
Webcam Logitech C110 Sebagai pengenalan pola bentuk dan warna Laptop Menjalankan program yang telah dibuat
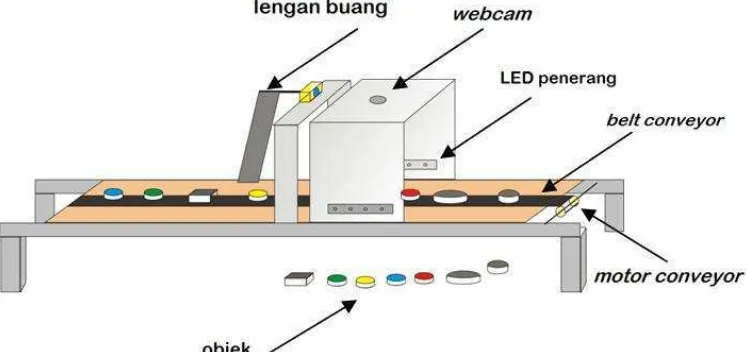
Gambar 3.1 Bentuk konveyor yang akan dibuat Keterangan tambahan gambar:
- Kerangka konveyor memiliki dimensi panjang 152 cm, lebar 22 cm dan
tinggi 24 cm.
- Roll konveyor berdiameter 5,2 cm dan panjang 11 cm.
- Belt konveyor, panjang 122 cm dan lebar 9 cm.
- Lengan buang adalah motor DC 12 V dengan kecepatan 40 rpm.
- Webcam Logitech C110, resolusi 1024x768 piksel dengan port USB sebagai
media komunikasi ke laptop. Sensor ini digunakan sebagai pengindra untuk
mengenali objek yang melintas.
- LED penerang berfungsi untuk mengurangi bayangan yang mengganggu
pembacaan kamera.
- Motor konvenyor adalah motor DC 12 V dengan kecepatan 40 rpm yang
berfungsi untuk menjalankan belt conveyor.
- Objek berupa pola bentuk dan warna yang dibuat dari sterofoam, untuk pola
lingkaran memiliki dimensi tinggi 1,5 cm dan jari-jari 4,5 cm, pola oval
akan dikenali adalah warna primer pigmen yaitu warna merah, kuning, dan
hijau.
Adapun spesifikasi sistem alat yang akan dibuat adalah sebagai berikut:
- Sistem dapat mengenali objek yang dikehendaki sehingga dapat diberikan
perlakukan sesuai yang diinginkan, misalnya untuk mengenali pola lingkaran,
maka konveyor hanya akan meloloskan objek yang berbentuk lingkaran,
apabila objek yang melintas memiliki pola oval, atau persegi maka dengan
otomatis objek tersebut segera dibuang.
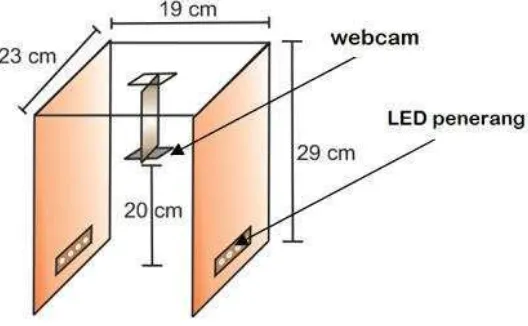
- Webcam diletakan di atas penyangga dengan ketinggian 20 cm diukur dari
[image:42.595.191.455.375.538.2]dasar hingga ke kamera.
Gambar 3.2 Rumah-rumahan dari tempat webcam
- Sistem terhubung langsung ke komputer dengan media komunikasi serial
RS-232 dengan antarmuka usb-to-serial converter, melalui fitur komunikasi
USART (Universal Synchronous Asynchronous serial Receiver and
Transmitter) yang tersedia pada mikrokontroller 8535.
- Sistem akan melakukan aksi dengan menggerakkan lengan pembuang ke
(setpoint) yang diinginkan, apabila objek sesuai maka lengan pembuang tidak
akan bergerak sehingga objek dapat terus berjalan (diloloskan).
- Human Machine Interface (HMI) dibuat dengan GUI di Matlab.
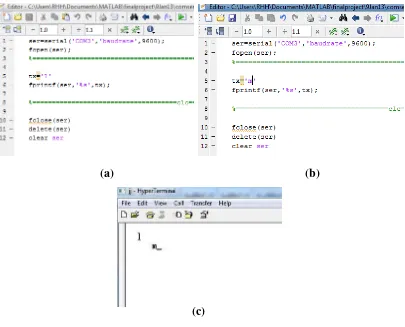
2. Simulasi
Pada tahap ini dilakukan simulasi proses pengiriman data serial dari Matlab yang
ditampilkan ke hyperterminal. Data yang dikirimkan berupa karakter “l” dan
karakter “m” yang nantinya digunakan untuk melakukan aksi jika diterima oleh
mikrokontroller.
(a) (b)
[image:43.595.113.518.333.660.2](c)
C.Tahap- Tahap Dalam Pembuatan Tugas Akhir 1. Perancangan Sistem Alat
1.1Prosedur Kerja
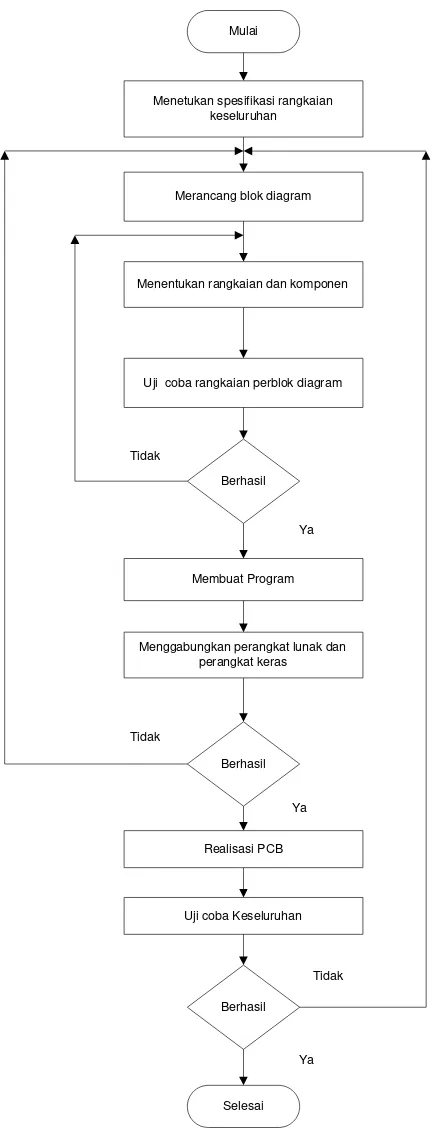
Pada diagram alir Gambar 3.5 digambarkan tahap-tahap perancangan dalam
pembuatan alat rancang bangun konveyor pemisah barang berdasarkan
pengenalan pola bentuk dan warna. Hal ini dilakukan untuk memudahkan dalam
perancangan dan pembuatan tugas akhir dan dapat mengetahui sejauh mana
kesalahan atau kegagalan dalam pembuatan tugas akhir.
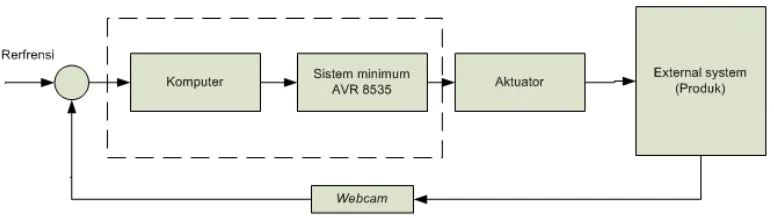
[image:44.595.117.504.335.444.2]1.2Blok Diagram
Gambar 3.4 Blok sistem kendali
Gambar 3.4 menerangkan blok sistem kendali pada sistem konveyor, ketika
inisialisasi diberikan, webcam akan mengakuisisi citra kemudian diteruskan ke
komputer. Proses ini akan berjalan terus menerus untuk mengetahui jumlah piksel
yang ditangkap oleh webcam, apabila terdapat perubahan piksel dari yang
ditetapkan berarti terdapat objek yang melintas, kemudian pengendali akan
Gambar 3.5 Diagram alir perancangan alat
Objek akan berhenti tepat diatas kamera dengan posisi sedemikian rupa sehingga
diperoleh citra yang tepat, kemudian citra diolah untuk dikenali, jika objek tidak
Ya Mulai
Menetukan spesifikasi rangkaian keseluruhan
Merancang blok diagram
Menentukan rangkaian dan komponen
Uji coba rangkaian perblok diagram
Berhasil
Membuat Program
Menggabungkan perangkat lunak dan perangkat keras
Berhasil
Realisasi PCB
Uji coba Keseluruhan
Berhasil
Selesai Tidak
Ya Tidak
sesuai dengan inisialisasi yang diberikan maka aktuator akan memberikan
perlakukan yakni membuang objek tersebut, jika sesuai maka objek tersebut akan
[image:46.595.185.442.163.373.2]diloloskan.
Gambar 3.6 Blok diagram sistem
Gambar 3.6 menjelaskan mengenai diagram blok secara keseluruhan, proses
bermula dari citra yang ditangkap oleh webcam kemudian diteruskan ke komputer
dengan antarmuka USB (Universal Serial Bus) kemudian gambar diolah dengan
[image:46.595.185.444.515.706.2]teknik pengolahan citra.
Tujuan dari pengolahan citra pada tahap ini untuk mengetahui total piksel dari
citra yang ditangkap secara terus-menerus, apabila total piksel mengalami
perubahan yang signifikan berarti terdapat objek yang melintas di atasnya,
kemudian komputer akan mengirimkan data serial ke sistem minimum AVR 8535
dengan komunikasi RS-232 untuk menghentikan motor konvenyor. Segera setelah
motor konveyor berhenti, maka webcam akan mengambil citra untuk diolah yang
akhirnya citra dapat dikenali dan diberi perlakukan sesuai dengan inisialisasi awal
dengan mengaktifkan motor lengan buang.
1.3Perancangan Sistem Perangkat Lunak
Pada perancangan perangkat lunak digunakan Matlab 2011a untuk mengolah dan
menganalisis citra. Pengolahan citra dan analisis citra menggunakan toolboxes
Image Processing dan Image Acquisition. Sintaks pemograman menyerupai
[image:47.595.125.498.440.655.2]bahasa C dan untuk pengolahan citra direpresentasikan dengan inisialisasi kata.
Pembuatan panel kontrol menggunakan GUI (Graphical User Interface) yang ada
di Matlab. Pemrogramannya menyerupai Visual Basic yakni dengan membuat
[image:48.595.183.446.158.385.2]panel-panel yang dapat diprogram.
Gambar 3.9 Tampilan pada pembuatan panel kontrol GUI
Pemrograman mikrokontroller ATmega 8535 menggunakan perangkat lunak
CodeVision AVR. Pembuatan program ini juga menggunakan bahasa C yang
kemudian di-compile menjadi bahasa hex untuk di-download ke ATmega 8535
menggunakan bantuan Khazama AVR.
[image:48.595.173.454.513.741.2]Gambar 3.11 Tampilan pada Khazama AVR
Perangkat lunak ini diperlukan jika menggunakan downloader ASP, untuk
men-download langsung dari CodeVision AVR harus menggunakan men-downloader ISP.
[image:49.595.202.425.87.214.2] [image:49.595.211.361.299.608.2]Gambar 3.13 Diagram alir motor lengan buang
2. Pembuatan Sistem Alat
Pada pembuatan sistem alat ini dibagi menjadi dua tahapan yakni pembuatan
sistem perangkat lunak alat dan pembuatan sistem perangkat keras alat.
2.1Pembuatan sistem perangkat lunak
Pada tahap ini, hal pertama yang dilakukan adalah akuisisi citra dari webcam ke
matlab. Untuk dapat mengakuisisi harus dilakukan konfigurasi dahulu pada
matlab, sehingga devais webcam dapat digunakan sebagaimana mestinya. Adapun
Gambar 3.14 Diagram proses pengenalan bentuk
Agar perangkat webcam dapat digunakan, maka dilakukan konfigurasi terlebih
dahulu dengan memberikan perintah sebagai berikut:
project=guidata(gcbo); axes(handles.axes1);
vidObj = videoinput('winvideo',1,'YUY2_176x144'); set(vidObj,'ReturnedColorSpace','rgb');
videoRes = get(vidObj, 'VideoResolution'); numberOfBands = get(vidObj, 'NumberOfBands'); handleToImage = image( zeros([videoRes(2), videoRes(1),numberOfBands]));
handles.vidObj=vidObj; guidata(hObject,handles);
[image:51.595.243.376.91.474.2]Resolusi yang disediakan antara lain:
- YUY2_160x120
- YUY2_176x144
- YUY2_320x240
- YUY2_352x288
- YUY2_640x480
Resolusi yang digunakan adalah YUY2_176x144 karena untuk lebar jendela pada
tampilan GUI yang digunakan resolusi tersebut yang cocok.
Gambar 3.15 Tampilan jendela kamera
Pada tahap Preprocessing Image, citra yang telah diakuisisi kemudian akan diolah
sehingga menghasilkan citra yang siap untuk dilakukan analisis.
axes(handles.axes2); img=frame;
gray=rgb2gray(frame); %membuat menjadi citra grayscale
thresh=graythresh(gray);
bw=im2bw(gray,thresh); %binerisasi
bw=~bw; %invers citra
bwr=bwareaopen(bw,1000); %menghilangkan noise
se=strel('disk',5);%pendekatan
bws=imclose(bwr,se); % pendekatan
bwf=imfill(bws,'holes');%menghilangkan bintik-bintik
[image:52.595.114.512.304.511.2]Pada tahap Processing Image citra yang sudah bersih dari noise akan dikenali
dengan cara menghitung jumlah matrik dari objek yang ditangkap. Agar dapat
dihitung dengan benar maka diberikan boundaries pada citra dan region of
interest (ROI) sehingga benar-benar matrik dari objek yang dihitung dan bukan
matrik dari citra background.
[B,L] = bwboundaries(bwf,'noholes');
acuan=0.9; % Acuan untuk menentukan centroid
hold on
for k = 1:length(B) boundary = B{k};
plot(boundary(:,2), boundary(:,1), 'r', 'LineWidth', 2)
end
stat=regionprops(L,'Area','Centroid');
for k=1:length(B) boundary=B{k};
delta_s=diff(boundary).^2;
perimeter=sum(sqrt(sum(delta_s,2))); area=stat(k).Area;
metric=4*pi*area/perimeter^2;
if metric > acuan
centroid=stat(k).Centroid;
plot(centroid(1),centroid(2),'ko');
end
metric_string = sprintf('%2.2f',metric); set(handles.text1,'String',metric_string);
Setelah diketahui jumlah matrik dari proses analisis citra, maka keputusan dapat
dilakukan, yakni dengan mengelompok ke dalam range-range tertentu sesuai
dengan jenis objek yang dimaksud.
if (metric >= 0.88) % Perlakuan untuk memisahkan circle
set(handles.text2,'String','CIRCLE');
else
set(handles.text2,'String','NOT CIRCLE');
Program diatas merupakan contoh untuk memberikan keputusan jika diperoleh
Gambar 3.16 Tampilan untuk inisialisasi pengenalan bentuk
Apabila diberikan inisialisasi circle maka hanya objek lingkaran saja yang akan
diloloskan selain itu akan dibuang begitu juga sebaliknya dengan inisialisasi oval
maka hanya objek oval saja yang akan diloloskan selain itu akan dibuang.
Untuk pengenalan pola warna, citra yang diperoleh dari webcam langsung
diproses untuk diekstraksi warnanya, tidak perlu masuk kedalam tahap
preprocessing.
[image:54.595.213.385.86.204.2] [image:54.595.244.371.426.662.2]Serupa dengan pengenalan bentuk, pertama yang dilakukan adalah konfigurasi
kamera, resolusi yang digunakan juga sama yakni YUY2_176x144.
project=guidata(gcbo); axes(handles.axes1);
vidObj = videoinput('winvideo',1,'YUY2_176x144'); set(vidObj,'ReturnedColorSpace','rgb');
videoRes = get(vidObj, 'VideoResolution'); numberOfBands = get(vidObj, 'NumberOfBands'); handleToImage = image( zeros([videoRes(2), videoRes(1),numberOfBands]));
handles.vidObj=vidObj; guidata(hObject,handles);
preview(vidObj, handleToImage);
Setelah akuisisi citra dilakukan maka citra dikonversi dari format RGB menjadi
format HSV karena pada format HSV karakteristik warna dapat dikenali
berdasarkan nilai Hue yang dihasilkan dari sebuah citra.
frame = getsnapshot(handles.vidObj); axes(handles.axes2)
img=rgb2hsv(frame);% Konversi dari RGB ke HSV
H=img(:,:,1); % ektrasi nilai Hue
hsvVal=[0.36];
nilaiHue=abs(H-hsvVal(1)); [m,n,t]=size(img);
i=zeros(m,n);j=zeros(m,n);k=zeros(m,n); i(find(nilaiHue < 0.1))= 1;
bwr=bwareaopen(i,200); se=strel('disk',2); bws=imclose(bwr,se); bwf=imfill(bws,'holes'); imshow(bwf);
Setelah diketahui nilai Hue dari citra objek maka nilai Hue tersebut diubah
menjadi nilai piksel untuk dikenali pola warnanya.
total_pix=sum(sum(i)); pix=num2str(total_pix);
set(handles.text7,'string',pix);
if (total_pix >= 5000)
set(handles.text2,'string','GREEN');
else
set(handles.text2,'string','NOT GREEN');
Nilai Hue dari sebuah citra akan dikurangkan dengan refrensi nilai Hue dari
refrensi akan dihilangkan. Total piksel akhirnya dapat diketahui dan citra dapat
dikenali sehingga dapat memberikan keputusan pola warna merah, hijau atau
kuning dari sebuah citra yang ditangkap.
Gambar 3.18 Tampilan inisialisasi pengenalan warna
Jika inisialisasi warna Red diberikan, maka objek yang bukan warna merah akan
dibuang dan objek dengan warna merah akan diloloskan, begitu juga dengan
inisialisasi pola warna hijau, dan kuning.
Akhir dari panel kontrol yang dibuat dengan menggunakan GUI dapat dilihat pada
Gambar 3.19 Seluruh kendali berada dikomputer dengan menggunakan
komunikasi serial RS-232. Sama halnya dengan penggunaan webcam, pada
Matlab juga harus dikonfigurasikan terlebih dahulu agar komunikasi serial dapat
digunakan.
ser=serial('COM3','baudrate',9600); fopen(ser);
.
=====program=====
.
fprintf(ser,’<text>’);
.
====program======
.
[image:56.595.263.361.166.300.2] [image:56.595.226.458.563.744.2]Gambar 3.19 Tampilan panel kontrol
2.2Pembuatan sistem perangkat keras
- Rangkaian mikrokontroller
Pada Gambar 3.20 ditunjukkan alokasi pin-pin pada mikrokontroller yang
digunakan pada rangkain pengendali. Perintah dari komputer dikirimkan secara
serial melalui PIND.0 dan PIND.1 untuk memberikan aksi ke PORTA.0 sebagai
[image:57.595.130.495.88.395.2]Gambar 3.20 Rangkaian mikrokontroller - Rangkaian catu daya
Sumber tegangan 220 V AC dihubungkan dengan transformator CT yang
menghasilkan tegangan 12 V AC kemudian masuk ke rangkaian jembatan dioda
untuk merubah dari AC ke DC 12 V. Catu daya yang diperlukan adalah 9 V DC
dan 5 V DC, jadi digunakan IC regulator tegangan 7809 dan 7805 yang
[image:58.595.159.507.94.325.2]mengeluarkan tegangan tetap 5 V DC dan 9 V DC.
[image:58.595.121.490.543.685.2]- Driver Relay motor konveyor dan motor lengan buang
Gambar 3.22 Driver relay pada motor lengan buang
Gambar 3.23 Driver relay pada motor konveyor
Pada motor konveyor mikrokontroller akan mengeluarkan isyarat high (3 V DC)
selama 1 detik yang mengaktifkan relay kekondisi NO (normally open) dan motor
akan berhenti selama 1 detik selanjutnya motor akan berjalan lagi. Pada motor
[image:59.595.117.457.84.350.2] [image:59.595.121.480.400.612.2]PORTB.0 yang membuat motor berputar searah jarum jam dan ketika PORTB.1
mengeluarkan isyarat high selama 0,8 detik maka motor akan berputar berlawan
arah jarum jam. Kondisi ini membuat motor seperti berputar kekanan kemudian
kekiri.
- Rangkaian LED penerang
Gambar 3.24 Rangkaian LED
Rangkaian LED penerang digunakan untuk menghilangkan bayangan saat
pengambilan citra oleh webcam. Penerangan diletakkan di sisi kiri dan kanan
rumah-rumahan pada konveyor.
3. Pengujian Alat
Pengujian alat dilakukan untuk mengetahui tingkat keberhasilan alat yang telah
dibuat. Pengujian dilakukan terhadap perangkat keras dan perangkat lunak. Pada
pengujian perangkat keras dilakukan dua kali pengujian yaitu pengujian per bagian
rangkaian dan pengujian rangkaian secara keseluruhan. Pengujian per bagian
bertujuan agar jika terjadi kesalahan pada rangkaian dapat diketahui lebih cepat dan
tepat. Sedangkan pengujian keseluruhan dimaksudkan untuk mengetahui tingkat
keberhasilan dari alat yang dibuat dan apakah sesuai dengan spesifikasi yang
program yang telah dibuat, dapat dilakukan dengan simulasi program pada Matlab
atau simulator pada Proteus.
4. Analisis dan Kesimpulan
Setelah proses pembuatan alat selesai, langkah selanjutnya ialah mengumpulkan
dan menganalisis data yang didapat dari pengujian keseluruhan alat yang sudah
dibuat. Proses analisis data dari pengujian alat ini dilakukan agar dapat diketahui
lebih dalam mengenai kelebihan dan kekurangan yang terdapat pada alat ini. Hal
tersebut dilakukan untuk mengambil kesimpulan.
5. Pembuatan Laporan
Pada tahap ini dilakukan penulisan terhadap data-data yang didapatkan dari hasil
V. KESIMPULAN DAN SARAN
A. Kesimpulan
Dari hasil analisis dan pembahasan maka diperoleh kesimpulan sebagai berikut
1. Telah terealisasi sebuah prototipe konveyor yang dapat memisahkan barang
berdasarkan pola bentuk yakni bentuk oval, lingkaran dan bukan keduanya
serta pola warna yakni warna merah, kuning dan hijau menggunakan
webcam.
2. Diperoleh galat sebesar 10% pada pengenalan bentuk lingkaran, 10% pada
pengenalan bentuk oval, 0% pada pengenalan warna merah, 10% pada
pengenalan warna hijau dan 10% pada pengenalan warna kuning.
B. Saran
Pada penelitian selanjutnya digunakan lebih dari satu kamera agar pengenalan
menjadi lebih presisi dan pola pencahan diperbanyak agar meminimalisir
pengaruh bayangan yang menggangu proses pengenalan citra. Perlu adanya
pengatur kecepatan motor konveyor, sehingga pemilihan objek dapat menjadi
DAFTAR PUSTAKA
Aritonang, N.D.U. 2009. Pemanfaatan Webcam sebagai Pemantau Pada Sistem Monitoring Ruangan Melalui Jaringan Internet. Universitas Lampung: Bandar Lampung
Fadlisyah. 2007. Computer Vision dan Pengolahan Citra. Andi Offset: Yogyakarta
Ma’aruf, A. 2011. Rancang Bangun Protipe Sistem Pemilahan Produk Kemasan Kotak Tiga Dimensi Berbasis Mikrokontroller ATmega8. Universitas Lampung: Bandar Lampung
Rahman, A.R. 2008. Peningkatan Kualitas Citra Hasil Identifikasi Objek. Universitas Lampung: Bandar Lampung.
Ramdhani, K. 2010. Rancang Bangun Protipe Sistem Pengendalian Konveyor Penyortiran dan Pengisian Barang Berbasis PLC. Universitas Lampung: Bandar Lampung.
Sulistiyanti, S.R.. FX. Arinto S. 2006. Dasar Sistem Kendali. Universitas Lampung: Bandar Lampung.
Wicaksono, Y.B.B. 2012. Sistem Identifikasi Tanda Nomor Kendaraan dengan Metode Histogram Citra dan Jaringan Syaraf Tiruan Backpropagation. Universitas Lampung: Bandar Lampung.