Sistem Pengendali Kemudi Traktor Otomatis Empat Roda Pada Operasi Pengolahan Tanah
Teks penuh
Gambar

Dokumen terkait
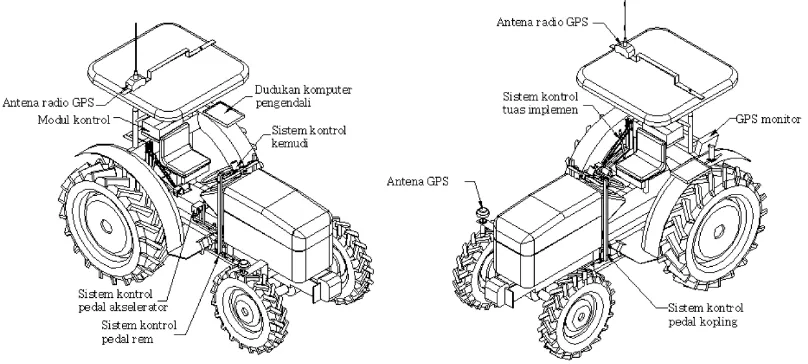
Dalam penelitian ini dikembangkan mekanisme baru yaitu mekanisme transmisi maju mundur untuk mendukung pergerakan traktor mengikuti jalur pengolahan lahan kering
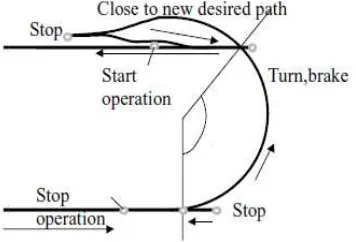
Mekanisme pengendali rem kiri dan kanan yang dapat dioperasikan secara terpisah akan memperkecil radius belok sedangkan mekasinme transmisi maju-mundur akan
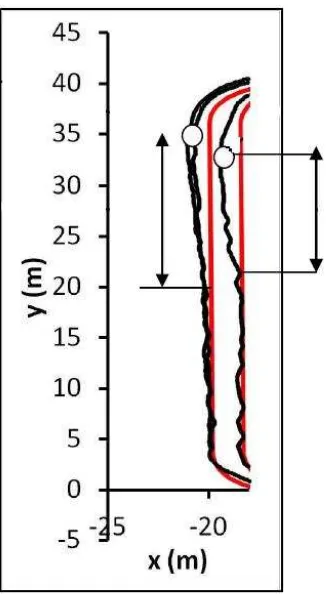
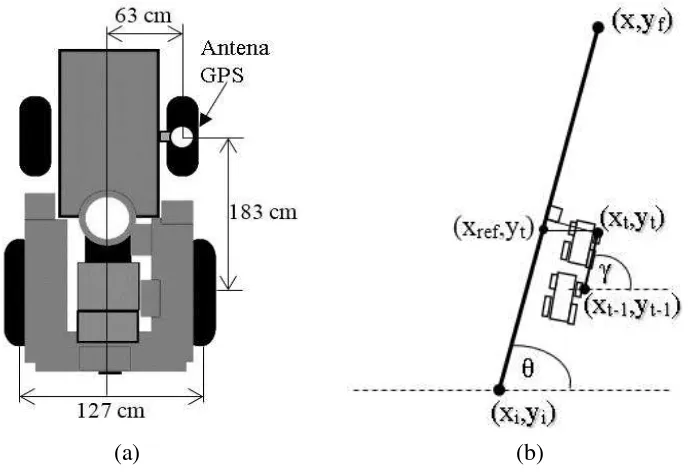
Penentuan tersebut penting untuk mengurangi simpangan-simpangan yang mungkin terjadi karena kausan pada mekanisme sistim kemudi dimana dipilih posisi satu poros dengan
traktor memiliki beban yang lebih besar pada pengolahan tanah menggunakan tiga bajak daripada satu bajak sehingga operator kesulitan dalam pengoprasian
Multi fungsi yang dimaksudkan adalah sistem kemudi empat roda dapat meningkatkan stabilitas arah kendaraan pada gerakan belok dengan kecepatan tinggi, dapat
traktor memiliki beban yang lebih besar pada pengolahan tanah menggunakan tiga bajak daripada satu bajak sehingga operator kesulitan dalam pengoprasian
Dalam penelitian ini dikembangkan mekanisme baru yaitu mekanisme transmisi maju mundur untuk mendukung pergerakan traktor mengikuti jalur pengolahan lahan kering
traktor memiliki beban yang lebih besar pada pengolahan tanah menggunakan tiga bajak daripada satu bajak sehingga operator kesulitan dalam pengoprasian
