55
RANCANG BANGUN DAN UJI KINERJA
DRIFTER BUOY
MUHAMMAD IQBAL
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
57
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI
Dengan ini saya menyatakan bahwa tesis yang berjudul: Rancang Bangun dan Uji Kinerja Drifter Buoy adalah karya saya dengan arahan dari komisi pembimbing dan belum pernah diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini
Bogor, September 2011
59
ABSTRACT
MUHAMMAD IQBAL. Design and Performance Test of Drifter Buoy. Under Direction of INDRA JAYA and MULIA PURBA.
The modern drifter buoy is a high-tech version of the "message in a bottle". It consists of a surface buoy and a subsurface drogue, attached by a long, thin tether. The buoy measures temperature and other sea/air properties, and has a transmitter to send the data to passing satellites. Drifters buoy for oceanographic research in the field had long been developed, but the design and construction of this instrument is still on going process. The major goal of the drifter intended by the designers of the drifter are cheap, lightweight and stable on several conditions. This study attempted to produce a drifter system capable of measuring position, speed and direction of surface current using a microcontroller, GPS and GSM technology as the data transmitter and receiver. There are 3 main parts of the drifter. They are the electronic systems, software and vehicles. Electronic systems are built from the microcontroller ATmega32, storage SD / MMC cards, transmission using GSM modem, GPS as a sensor position and velocity, and DALLAS DS18B20 as temperature sensors. The software is divided into 2 parts: software that is embedded into vehicle and software to control and receiving data in ground segment. Vehicle is divided into 2 main parts, first is float to house electronics system and drogue to maintain a position of drifter from the influence of surface wind. GPS used has a precision of 10 m, therefore the determination of position requires a certain time interval, this interval is very dependent on the speed of surface currents in the area. The results of performance test systems in the field showed that the design is able to record 95% -99% of the data successfully at 64 bps transfer speed. Field trial results also showed 85% and 93% successful data transmission using the GSM network with the power used in these systems totaling approximately 541-544 mW. The value of drag area ratio is 53.38, greater than 40 indicates that the drifter is produced has a pretty good ability to follow the movement of the water. In Pelabuhan Ratu, a different current direction at the center and edge of the bay. In the middle of the bay, when the water toward to lowest ebb the current direction towards to west and then silently at the lowest ebb. Finally, when water level increase the curent direction toward to the north. On the eastern edge of the bay, when the water toward to the lowest ebb, the direction of ocean surface current sheading out the bay.
61
RINGKASAN
MUHAMMAD IQBAL. Rancang Bangun dan Uji Kinerja Drifter Buoy. Dibimbing oleh INDRA JAYA dan MULIA PURBA
Modern Drifter buoy adalah versi teknologi tinggi dari “pesan dalam botol” dimana alat tersebut terdiri atas surface buoy dan subsurface drogue yang mampu melakukan pengukuran terhadap posisi, suhu dan faktor fisik lain dan data tersebut dikirimkan melalui satelit. Rancangan drifter yang murah, ringan dan stabil merupakan beberapa syarat yang dituju oleh para perancang drifter. Penelitian ini bertujuan menghasilkan desain dan konstruksi sistem drifter buoy untuk perairan pesisir dan mendapatkan data pengamatan drifting buoy yang handal/berkualitas. Perancangan dan pembuatan sistem serta analisis data pada penelitian ini dilaksanakan di laboratorium Instrumentasi dan Telemetri Kelautan Bagian Akustik dan Instrumentasi Kelautan Departemen Ilmu dan Teknologi Kelautan Institut Pertanian Bogor, sedangkan uji coba lapang akan dilakukan di teluk Pelabuhan Ratu Provinsi Jawa Barat, dilaksanakan pada tanggal 28 dan 30 Agustus 2010.
Beberapa tahap yang dilakukan dalam penelitian ini yaitu tahap perancangan perangkat keras, perancangan wahana, perancangan perangkat lunak, uji coba laboratorium, uji coba lapang dan analisis data. Perangkat keras terdiri atas mikrokontroler sebagai pusat pengendali menggunakan ATMega32, GPS sebagai sensor posisi, DS18B20 sebagai sensor suhu, Modem GSM sebagai transceiver dan media penyimpanan data SD/MMC card. Wahana buoy dibuat dari buoy polyprophelene yang dimodifikasi terdapat tiang untuk penempatan GPS dan antenna GSM, dibagian bawah terdapat sensor suhu. Pelampung ini disambungkan dengan drogue yang disetiap ujungnya dipasang besi melingkar untuk mempertahankan bentuk. Di bagian darat (penerima) dibuat perangkat lunak penerima dengan komputer dan modem GSM sebagai perangkat keras.
Hasil uji coba laboratorium menunjukan pencatatan dan pengiriman posisi, suhu, daya apung dan kedap air teruji dengan baik. Hasil uji kinerja sistem di lapangan menunjukan bahwa drifter hasil rancangan mampu mencatat 95% dan 99% data dengan kecepatan transfer 64 bps. Hasil uji coba lapang juga menunjukan 85% dan 93% sukses melakukan pengiriman data menggunakan jaringan GSM dengan daya yang digunakan sistem ini secara keseluruhan yaitu sekitar 541-544 mW. Nilai drag area ratio hasil desain penelitian ini sebesar 53.38 lebih besar dari 40 mengindikasikan bahwa Drifter yang dihasilkan memiliki kemampuan cukup baik untuk mengikuti pergerakan masa air.
Biaya implementasi dari sistem yang dibuat realtif lebih murah dibandingkan dengan implementasi dari sistem Drifter yang sudah ada (ARGOS, ORBCOMM dan IRRIDIUM) yaitu sekitar $729.1 dengan biaya transmisi perhari $4.4 untuk pengiriman setiap 5 menit. Sistem ini sangat bergantung dengan sinyal GSM yang ada di area ujicoba, oleh karena itu sistem ini hanya cocok digunakan pada perairan yang memiliki atau ada dalam coverage area dari komunikasi GSM.
62
menuju keluar teluk. Pada saat uji coba lapang juga diketahui bahwa di bagian tengah teluk panas cenderung tersimpan dikarenakan pergerakan arus memutar pada saat terjadi perubahan pasang surut dan di bagian pinggir teluk perubahan suhu cenderung cepat dan mengikuti matahari karena arus permukaan yang juga cepat.
63
© Hak Cipta milik IPB, tahun 2011
Hak Cipta dilindungi Undang-Undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya.
a. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah.
b. Pengutipan tersebut tidak merugikan kepentingan yang wajar IPB.
65
RANCANG BANGUN DAN UJI KINERJA
DRIFTER BUOY
Oleh:
MUHAMMAD IQBAL
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains pada
Program Studi Teknologi Kelautan
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
66
67
Judul Tesis : Rancang Bangun dan Uji Kinerja Drifter Buoy
Nama : Muhammad Iqbal
NRP : C552070041
Disetujui,
Komisi Pembimbing
Prof. Dr. Ir. Indra Jaya, M.Sc. Prof. Dr. Ir. Mulia Purba, M.Sc.
Ketua Anggota
Diketahui,
Ketua Program Studi Dekan Sekolah Pascasarjana Teknologi Kelautan
Dr. Ir. Djisman Manurung, M.Sc. Dr. Ir. Dahrul Syah, M.Agr.
69
PRAKATA
Puji dan syukur penulis haturkan kepada Allah SWT sehingga penulisan tesis dengan judul Rancang Bangun dan Uji Kinerja Drifter Buoy ini dapat penulis selesaikan.
Terima kasih penulis ucapkan kepada:
1. Bapak Prof. Dr. Ir. Indra Jaya M.Sc. selaku ketua komisi pembimbing dengan penuh kesabaran memberikan arahan dan masukan yang sangat berharga. 2. Bapak Prof. Dr. Ir. Mulia Purba M.Sc. selaku anggota komisi pembimbing
atas segala kritik, saran dan arahannya telah memberikan banyak pelajaran berharga untuk penulis.
3. Bapak Dr. Ir. Agus Soleh Atmadipoera, DES. atas kesediaan, saran dan kritik sebagai penguji tamu.
4. Bapak Dr. Ir. Djisman Manurung M.Sc. selaku ketua mayor Teknologi Kelautan (TEK).
5. Istri tercinta, Nurul Hidayah, S.Kep, Ners. atas semangat, dukungan dan dorongan yang tiada henti-hentinya untuk penulis menyelesaikan tesis ini. 6. Keluarga besar H. Drs. Alwi H.M. Saleh dan H. Muhammad Haris, SH atas
dukungan dan doa yang diberikan.
7. Staf pengajar dan administrasi dari Program Studi Ilmu dan Teknologi Kelautan yang telah senantiasa memberikan semangat dan membantu dalam penulisan tesis ini.
8. Teman-teman seperjuangan TEK-2007: Moh. Natsir, M.Si, Asmadin, M.Si, Amadan Takwir, M.Si dan lainnya, atas segala bantuan dan sarannya.
9. Keluarga besar Bagian Akustik dan Instrumentasi Kelautan-IPB atas dukungan dan kerjasamanya.
10.Keluarga besar Workshop Instrumentasi Kelautan – IPB, Febrianto Wardhana Putra, S.P , Effin Mutaqin, S.Pi, Asep Mamun, S.Pi, Jimmi Tampubolon, S.Pi, Frizt Mario, S.Pi, Christiadi Triyatna, S.Pi dan lainnya yang tidak dapat penulis sebutkan satu-persatu disini atas saran, kritik dan dukungannya sehingga penulis dapat menyelesaikan tesis ini.
Penulis menyadari bahwa karya ini masih jauh dari kesempurnaan, oleh karena itu penulis sangat mengharapkan kritik dan saran sehingga karya ini menjadi lebih baik dan semoga karya ilmiah ini dapat berguna.
Bogor, Agustus 2011
71
RIWAYAT HIDUP
Penulis dilahirkan di Dompu Nusa Tenggara Barat, pada tanggal 28 Agustus 1982 sebagai anak keempat dari empat bersaudara dari keluarga guru H. Drs. Alwi H. M. Saleh. Pada tahun 2000 penulis lulus dari SMA Negeri 1 Mataram dan diterima Program Studi Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan (FPIK) Institut Pertanian Bogor (IPB) dan menamatkannya pada tahun 2005.
Selama ini penulis banyak berkecimpung di dunia perancangan instrumentasi dan telemetri kelautan. Bersama Lab. Instrumentasi dan Telemetri Kelautan, Departemen Ilmu dan Teknologi Kelautan, FPIK, IPB penulis telah ikut serta menghasilkan beberapa instrumen seperti:
Instrumen pembeda jenis kelamin ikan koi Instrumen pemilah dan penghitung ikan hidup System buoy untuk coastal monitoring
Robot jelajah bawah air (ROV RJ-45)
Instrumen Pasang surut berbasis gelombang akustik
72
2.4. Drag Area Ratio untuk menentukan baik buruknya desain Drifter ... 14
2.5. Transmisi dan Format Data Drifter. ... 16
2.6. Penentuan Posisi Menggunakan GPS (Global Positioning System). ... 21
2.7. Mikrokontroler Sebagai Pusat Kendali dalam Rancang Bangun Drifter. ... 23
2.8. Modem GSM sebagai Pengirim dan Penerima data. ... 25
2.9. Sensor Suhu DALLAS DS18B20 ... 26
2.10 Media Penyimpanan Data MMC/SD Card. ... 28
2.11. Biaya Implementasi dan Biaya Rancang Bangun Drifter ... 32
2.12. Keadaan Umum di Perairan Teluk Pelabuhan Ratu. ... 33
3. METODE PENELITIAN ... 37
3.6. Rancang Bangun Perangkat Lunak Sistem Drifter Buoy... 43
73
Penyimpanan data logger ... 61
4.2.3. Sensor Suhu DS18B20 dan Modul Perangkat Lunak Pembaca Sensor Suhu ... 62
4.2.4. Antarmuka GPS ... 65
4.2.5 Antarmuka Modem GSM untuk Pengiriman Data dan Kendali Dua Arah ... 69
4.2.6. File Konfigurasi Kerja Drifter (CONFIG.INI) ... 73
4.2.7. Perangkat Lunak Penerima ... 74
4.2.8. Perbandingan Spesifikasi Drifter yang dihasilkan dengan drifter ARGOS, ORBCOMM dan IRRIDIUM ... 77
4.2.9. Biaya Implementasi dan Transmisi Sistem Drifter yang dikembangkan ... 77
4.3. Hasil Uji Coba Laboratorium ... 80
4.4. Uji Coba Lapang (Teluk Pelabuhan Ratu) ... 87
4.4.1. Lintasan Drifter ... 91
4.4.2. Pola Arus ... 92
4.4.3. Sebaran Suhu ... 99
5. KESIMPULAN DAN SARAN ... 103
DAFTAR PUSTAKA ... 105
74
Gambar 9. Sistem Diagram yang dibangun dari drifter wireless oleh Yu-Dong ... 25
Gambar 10. (a) Modem GSM Wavecom.inc (b) Modem GSM dengan GPS Built-in produksi SIMCOM.inc ... 27
Gambar 11. GSM Communication unit 3742 berisi modem GSM produksi Wavecom.inc digunakan AANDERA.inc sebagai transmiter Data produk yang dimilikinya ... 28
Gambar 12. Bentuk Fisik dan Peta Memori Sensor Suhu DS18B20 ... 31
Gambar 13. Peta Bathimetri Teluk Pelabuhan Ratu ... 33
Gambar 14. Rancang Bangun Wahana Buoy ... 41
Gambar 15. Skema Fungsional Perangkat Elektronika buoy ... 42
Gambar 16. Diagram Alir Program Utama ... 44
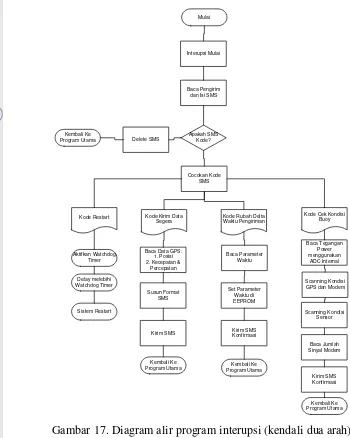
Gambar 17. Diagram Alir Program Interupsi (Kendali dua arah) ... 48
Gambar 18. Diagram Alir Perangkat Lunak Penerima Data ... 49
Gambar 19. Titik Awal Pelepasan buoy ... 51
Gambar 20. Diagram Alir Pengolahan data menjadi bentuk spreadsheet ... 52
Gambar 21. Ilustrasi Koordinat 2 Titik ... 53
Gambar 22. Hasil Rancang Bangun Drifter buoy ... 56
Gambar 23. Rangkaian Utama Mikrokontroler drifter berbasis ATMega32 ... 59
Gambar 24. Rangkaian Antarmuka MMC/SD Card ... 61
Gambar 25. (a) Rangkaian Sesnor DS18B20 (b) Hasil Sensor Suhu yang telah dibuat ... 64
Gambar 26. (a) PMB-648 Parallax tampak atas (b) tampak samping ... 65
Gambar 27. Alur Pembacaan GPS ... 67
Gambar 28. Rangkaian Antarmuka Modem GSM ... 70
Gambar 29. File CONFIG.INI sebagai pengatur kerja buoy ... 74
Gambar 30. Tampilan Perangkat Lunak Penerima Data ... 75
Gambar 31. (a) Plot Data Pengukuran Suhu menggunakan Thermometer Dan DS18B20 (b) Fit data kedua pengukuran ... 81
Gambar 32. Pola Sebar Spasial hasil Pengukuran Titik I (a), Titik II (c), Titik III (e), beda jarak titik secara berurut Titik I (b), Titik II (d), Titik III (f)... ... 84
Gambar 33. Hasil Plot Data Uji Coba sekitar Kampus IPB Dramaga ... 86
Gambar 34. Uji Coba di Water Tank ... 87
Gambar 35. Drifter mengapung setengah dan antena tegak lurus Permukaan air ... 88
Gambar 36. (a) Waktu perubahan posisi hari pertama (b) waktu untuk Perubahan posisi dari kedua ... 90
Gambar 37. Plot Trek Percobaan tanggal 28 dan 30 Agustus 2010 ... 93 Gambar 38. (a) stickplot pengukuran drifter hari pertama (atas),
75
(b) stick plot Pengukuran drifter hari kedua (atas),
stick plot pengukuran manual di lapangan (bawah) ... 94 Gambar 39. Peta arah dan kecepatan arus pengukuran drifter (a) hari
Pertama (b) hari kedua ... 96 Gambar 40. Stick plot Arus dan Grafik Pasang surut (a) hari pertama
(b) hari kedua ... 98 Gambar 41. Hari Pertama (28 Agustus 2010) (a) Sebaran spasial suhu
(b) Suhu belum dirata-rata (c) suhu rata-rata 10 menit ... 100 Gambar 42. Hari Kedua (30 Agustus 2010) (a) Sebaran spasial suhu
76 DAFTAR TABEL
Tabel 1. Spesifikasi Sensor Suhu SVP Drifter ... 11 Tabel 2. Beberapa Contoh selang waktu transmisi drifter
yang sudah ada ... 11 Tabel 3. Perhitungan Drag Area Ratio (contoh) ... 16 Tabel 4. Perbandingan Sistem Drifter dari IRIDIUM, ARGOS dan
ORBCOMM ... 19 Tabel 5. Perbandingan Teknologi Buoy untuk Ocean Monitoring ... 20 Tabel 6. Format data ARGOS ... 21 Tabel 7. Jenis Kalimat NMEA yang umum digunakan ... 23 Tabel 8. Jenis kalimat AT-COMMAND sebuah modem GSM Standar ... 29 Tabel 9. Biaya Pembuatan Drifter Wireless ... 32 Tabel 10. Penjelasan NMEA $GPRMC ... 45 Tabel 11. Daftar Perintah Kendali dua Arah ... 47 Tabel 12. Perhitungan Drag Area Ratio yang dihasilkan ... 57 Tabel 13. Perbandingan drifter yang dihasilkan dengan drifter ARGOS
77 DAFTAR LAMPIRAN
Lampiran 1. Gambar Desain Akhir Drifter Buoy ... 111 Lampiran 2. Contoh Data Mentah ... 112 Lampiran 3. Metode Konversi Latitude dan Longitude ke UTM ... 113 Lampiran 4. Program MATLAB untuk merubah koordinat degree ke
Koordinat UTM ... 116 Lampiran 5. Data per 10 menit Hari Pertama (28 Agustus 2010) ... 117 Lampiran 6. Data per 10 menit Hari Kedua (30 Agustus 2010) ... 119 Lampiran 7. Script MATLAB untuk merubah ke dalam format KML ... 120 Lampiran 8. Script MATLAB untuk pengolahan data Kecepatan
78
1. PENDAHULUAN
1.1 Latar Belakang
Modern Drifter Buoy adalah versi teknologi tinggi dari “pesan dalam botol”, dimana alat tersebut terdiri atas surface buoy dan subsurface drogue yang mampu melakukan pengukuran terhadap posisi, suhu dan faktor fisik lain, serta data tersebut dapat dikirimkan melalui satelit. Dengan kemajuan teknologi, drifter sekarang mampu memberikan informasi kepada peneliti tentang pola sirkulasi laut secara realtime. Data yang dikumpulkan dari instrumen ini akan memungkinkan bagi ilmuwan untuk merancang model pola iklim dan cuaca, seperti El Niño dan badai, serta memprediksi sebaran polutan, seperti minyak atau limbah (Niiler, 1995). Informasi dari drifter juga dapat digunakan untuk mempelajari lebih lanjut tentang distribusi dan kelimpahan biota laut. Penggunaan drifter untuk penelitian di bidang oseanografi telah cukup lama dilakukan, namun perancangan, desain, dan pengembangan dari instrumen ini masih terus dilakukan. Rancangan drifter yang murah, ringan dan stabil merupakan beberapa syarat yang dituju oleh para perancang drifter. Di Indonesia penggunaan drifter sebagai alat penelitian oseanografi masih jarang dilakukan dan drifter yang dilepas oleh ARGOS pun hampir tidak ada yang memasuki perairan Indonesia.
Perkembangan teknologi elektronika seperti GPS (Global Positioning System), mikrokontroler dan sensor yang sangat cepat menyebabkan alat-alat ini menjadi semakin murah, dan dengan kemampuan yang makin baik. Penggunaan teknologi elektronika tersebut sebagai alat bantu penelitian di bidang oseanografi semakin memungkinkan dan menjanjikan dari sisi harga dan ketelitian. Jika pada awalnya penggunaan teknologi GPS pada drifter merupakan sebuah project yang cukup mahal yang hanya bisa dilakukan oleh lembaga-lembaga penelitian besar seperti NOAA, kini alat-alat tersebut sudah makin cukup terjangkau.
79
di Indonesia. Soeboer (2007) merancang sebuah instrumen GPS Buoy yang mampu mengukur pola arus permukaan laut Pelabuhan Ratu, namun instrumen ini masih memiliki kendala dimana GPS yang digunakan masih mahal, operasi yang tidak mudah dilakukan, memori penyimpanan yang terbatas, operasi dengan jangka waktu yang tidak lama, serta belum dilengkapi sistem transmisi. Penelitian dengan melakukan perancangan sistem dan instrumen yang mudah dioperasikan, dan dengan kemampuan yang tepat guna perlu dilakukan sehingga diharapkan dihasilkan sebuah drifter yang memiliki kemampuan handal dan tepat guna. Penelitian ini menggunakan komponen, bahan dan material yang mudah didapatkan di pasaran sehingga diharapkan mampu mengurangi ketergantungan teknologi atau menciptakan kemandirian teknologi khususnya untuk teknologi drifter dalam pemetaan pola arus permukaan laut.
1.2Kerangka Pemikiran
80
Ohlman (2007), mengembangkan drifter yang didesain untuk perairan pesisir. Beberapa syarat yang ditemukan yaitu drifter pesisir harus memiliki resolusi spasial beberapa meter, dan sampel posisi dilakukan setiap beberapa menit. Pengukuran near-real-time data telemetri diperlukan sehingga drifter dapat digunakan untuk membantu dalam melacak dan memulihkan jika terjadi kehilangan, dan untuk memberikan posisi terbaru sehingga drifter dapat dipulihkan tanpa pemantauan visual. Kemampuan memulihkan sendiri dan dapat melakukan penugasan kembali sangat meningkatkan nilai ekonomi drifter. Drifter elektronik harus hemat energi sehingga dapat beroperasi selama beberapa hari sedangkan sampling dan transmisi setiap beberapa menit. Perkembangan teknologi elektronika dan komunikasi saat ini memungkinkan dikembangkannya sebuah instrumen drifter murah yang merupakan salah satu tujuan dari penelitian ini. Perancangan dilakukan dengan memanfaatkan bahan-bahan yang tersedia di pasaran dengan harga yang murah seperti modul GPS, modul mikrokontroler, SD/MMC Card dan Modem GSM.
81
Spesifikasi dan penilaian kinerja Drifter Hasil Rancangan
Gambar 1. Skema alur penelitian
1.3Perumusan Masalah
Menurut Ohlmann (2005), transmisi data menggunakan sistem satelit yang ada, seperti GLOBALSTAR, ORBCOMM, dan ARGOS membutuhkan biaya dari $5,00 hingga $15,00 per-hari per-drifter untuk update data setiap 10-menit. Transmisi data seperti sistem seluler terbatas pada Line of Sight dari BTS GSM terdekat. Namun, biaya komunikasi seluler yang mendekati US $ 0,50 per hari per drifter untuk pencatatan posisi setiap 10 menit dengan beberapa pembatasan pada jumlah data yang dapat ditransmisikan.
Beberapa kesalahan umum dari sebuah drifter (Stewart, 2007), yaitu : a) Kegagalan drifter untuk mengikuti kolom air tertentu. Asumsinya drifter
82
c) Kesalahan Sampling. Drifter cenderungtidak ada didaerah-daerahaliran berbeda.
Pada dasarnya drifter adalah GPS yang ditempatkan dalam sebuah wahana yang terapung mengikuti massa air tertentu dan dapat mencatat posisi serta mengirimkan posisi dan data dari sensor yang dibawanya. Makin murahnya harga single chip GPS, mikrokontroler (chip yang mampu diprogram), dan komponen elektronika lainnya, serta dukungan BTS seluler yang semakin tersebar memungkinkan untuk dikembangkannya sebuah drifter pesisir pantai yang tercakup sinyal seluler.
Penelitian ini mencoba melakukan perancangan instrumen drifter ekonomis dengan mengikuti tipe desain SVP yang disesuaikan dengan alat dan bahan yang tersedia di Indonesia. Sensor yang digunakan yaitu GPS sebagai sensor posisi dan sensor suhu. Drifter digunakan di daerah yang terjangkau sinyal GSM sehingga transmisi data menggunakan sinyal GSM berupa SMS (Short Message Services).
Hipotesis yang akan dibuktikan adalah komponen elektronika GPS dan mikrokontroler serta bahan material yang tersedia dipasaran dapat dibuat menjadi drifter yang mampu memetakan pola pergerakan arus permukaan dan suhu perairan.
1.4 Tujuan Penelitian
Tujuan dari penelitian ini yaitu:
1. Menghasilkan desain dan konstruksi sistem drifter buoy untuk perairan pantai 2. Mendapatkan data pengamatan drifter buoy yang handal/berkualitas.
1.5 Manfaat Penelitian
83
84
2. TINJAUAN PUSTAKA
2.1. Sejarah Penggunaan Drifter Buoy
Pengamatan menggunakan drifter diawali di pantai timur Amerika Serikat pada pertengahan 1700-an (Franklin, 1785; Davis, 1991) dan diaplikasikan hampir di seluruh dunia pada 1872-1876 yang terkenal dengan sebutan Challenger Oceanography Survey di sebagian besar 354 stasiun hidrografi (Thomson, 1877; Niiler, 2001). Munculnya radio kemudian memungkinkan posisi drifter dapat ditransmisikan dengan menggunakan triangulasi dari pantai (Davis, 1991). Drifter jenis ini masih diproduksi sampai saat ini, terinspirasi oleh desain berbentuk silang yang digunakan di Coastal Ocean Dynamics Experiment (CODE). Dalam CODE, 164 drifter digunakan untuk memetakan arus dan variabilitas dan untuk menghitung Integral langrangian scale dan dispersi lepas pantai California (Davis, 1985).
85 window shade drogues bisa memutar dan berlayar melintasi arus sehingga parasut bisa runtuh (Niiler et al., 1987, 1995; Niiler dan Paduan, 1995; Pazan dan Niiler, 2001).Faktor-faktor lain juga dipertimbangkan misalnya bentuk tiga dimensi parasut tristar ditemukan lebih baik daripada karakteristik parasut berlubang yang dikembangkan AOML.Pada tahun 1993 desain SVP untuk drifter telah muncul dengan mengkombinasikan parasut berlubang dari drifter dan diperkuat AOML.Desain tersebut (Sybrandy dan Niiler, 1992) menjadi dasar bagi pengembangan drifter SVP sampai saat ini.
Kumpulan data dari SVP drifter memuat semua drifter yang dikerahkan selama 1979 - 1993 memiliki parasut berlubang yang terpusat di kedalaman 15 meter. Drifter tipe AOML dengan parasut berlubang ditempatkan pertama kali pada bulan Februari 1979 sebagai bagian dari TOGA/Equatorial Ocean Circulation Experiment. Penyebaran skala besar dari Drifter SVP modern pertama dilakukan pada tahun 1988 (World Climate Research Program, 1988) dengan tujuan pemetaan sirkulasi permukaan Samudera Pasifik. Upaya ini diperluas untuk skala global sebagai bagian Atlantik WOCE dan Atlantic Climate Change Program (ACCP), di mana array drifter SVP diperbanyak untuk Cooperation Panel (DBCP) dari Meteorological Organization and International Oceanographic Comission.
86
penyebaran drifter, memproses data, menyimpan file yang menggambarkan setiap drifter, dan sebagai pengelola situs resmi dari GDP yaitu http://www.aoml.noaa.gov/phod/abcd/gdp.html. JIMO mengawasi industri, memperoleh drifter dari berbagai produsen, melakukan upgradeteknologi, melakukan pengembangan sensor baru, dan mendokumentasikan data, dan melakukan koreksi serta penyempurnaan data (Pazan dan Niiler, 2004) untuk kemudian dipublikasikan kepada masyarakat riset. Produsen drifter SVP bertugas melakukan produksi sesuai spesifikasi dan kebutuhan para peneliti.
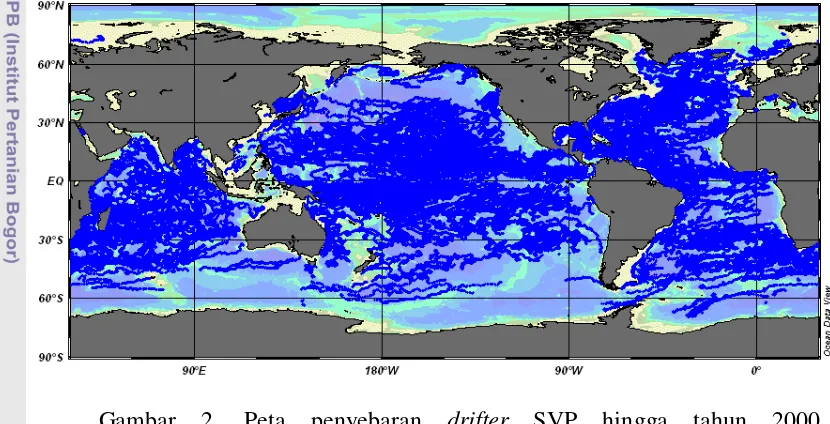
Gambar 2. Peta penyebaran drifter SVP hingga tahun 2000 (Sumber: http://sunburn.aoml.noaa.gov/phod/dac/index.php)
2.2. Perancangan DrifterSVP
Saat ini ada dua desain dasar dari drifter SVP yaitu pertama drifter SVP yang relatif besar dan yang terbaru yaitu mini drifter SVP. Desain pertama sangat kuat tetapi cenderung mahal dan berat. Desain ulang yang menghasilkan mini drifter SVP diusulkan pada bulan desember 2002 dan sudah diproduksi oleh beberapa produsen drifter.
87
FL USA; http://www.technocean.com). Diameter drifter SVP berkisar dari 30.5 cm (mini terkecil) sampai 40 cm. Awalnya, pelampung permukaan terbuat dari fiberglass dengan tebal 0.3-0.4 cm (Sybrandy dan Niiler 1991). Kebanyakan produsen sekarang beralih ke bahan yang lebih murah yaitu bahan plastik ABS (Akrilonitril-Butadiene-styrene) yang biasanya digunakan untuk konstruksi lambung kapal. Pelampung pada bagian permukaan berisi baterai dengan dilengkapi dioda pelindung, biasanya 4-5 buah masing-masing dengan 7-9 buah D-sel baterai alkaline.
Pemancar satelit (401,650 MHz, 10 kHz) biasanya diaktifkan dengan menghilangkan magnet dari lambung buoy, sebuah termistor untuk sub-surface suhu permukaan laut, terletak di bagian bawah untuk menghindari pemanasan akibat radiasi langsung dari matahari, dan alat lain seperti pengukur tekanan udara, kecepatan angin dan arah angin, salinitas, atau warna lautan. Kebanyakan produsen menggunakan cat oksida di bagian dasar hingga setengah dari permukaan yang mengambang untuk mengurangi biofouling.
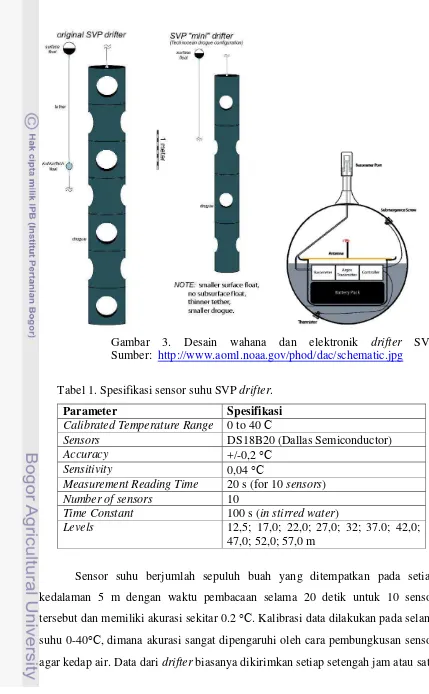
Adapun beberapa standarisasi dan spesifikasi dari SVP drifter (http://www.aoml.noaa.gov/phod/dac/dacdata.php, Gambar. 3) yaitu pelampung permukaan berdiameter 32 cm (atau 40 cm), terbuat dari bahan plastik ABS setebal 4 mm (0,16 ") dan menggunakan mantel luar yang berfungsi untuk melindungi terhadap sinar UV. Parasut berlubang terbuat dari kain berbahan non-fray sintetik memiliki diameter 61 cm, panjang 490 cm. Konstruksi terdiri dari 4 bagian silinder, masing-masing memiliki panjang 122 cm dengan dua pasang lubang dengan masing-masing berdiameter 30.5 cm. Transmiter menggunakan transmitter ARGOS dengan 32 baterai D-Alkaline yang setara dengan 75 AH atau dapat beroperasi selama 24 bulan. Catu daya utama sebesar 12 V dengan rata-rata konsumsi daya sebesar 0.035 Watt (56 bit format data) atau 0.084 Watt ( 248 bit format data pengiriman).
88
Gambar 3. Desain wahana dan elektronik drifter SVP Sumber: http://www.aoml.noaa.gov/phod/dac/schematic.jpg
Tabel 1. Spesifikasi sensor suhu SVP drifter.
Parameter Spesifikasi
Calibrated Temperature Range 0 to 40 С
Sensors DS18B20 (Dallas Semiconductor)
Accuracy +/-0,2 С
Sensitivity 0,04 С
Measurement Reading Time 20 s (for 10 sensors)
Number of sensors 10
Time Constant 100 s (in stirred water)
Levels 12,5; 17,0; 22,0; 27,0; 32; 37.0; 42,0; 47,0; 52,0; 57,0 m
89
jam. Tabel 2, menunjukan beberapa contoh selang waktu transmisi data yang dilakukan oleh beberapa drifter yang sudah diujicobakan. Data sensor (termasuk SST dan tegangan baterai) biasanya diambil pada interval 90 detik. Rata-rata dihitung melalui pengamatan tujuh sampai sepuluh contoh secara terus menerus. Kemudian pada akhirnya data yang akan dikirimkan umumnya setiap 30-60 menit. Pada kasus tertentu transmisi data bervariasi seperti pada kasus yang membutuhkan data yang cukup detail misalnya daerah pesisir, drifter dibuat agar dapat dikonfigurasi ulang untuk mengatur selang waktu pengiriman.
Tabel 2. Beberapa contoh selang waktu transmisidrifter yang sudah ada
No Nama Program Selang Waktu Pencatatan (menit)
1 MONTED'ORO 2010 buoys 30
2 LATEX buoys 60
3 PELMED/SARDONE 2008 buoys 30
4 PELMED/SARDONE 2007 buoys 60
5 ECOLO4 buoys 60
2.3. Penggembangan Drifter untuk Pesisir
90
Drifter (Gambar 4b). Davis Drifter memiliki 3 komponen utama yaitu badan utama yang terbuat dari PVC sepanjang 3 m dengan diameter 10 inci, pada bagian inilah perangkat elektronika ditempatkan. Pelampung berjumlah 4 buah yang ditempatkan pada setiap sudut, bagian kedua yaitu layar yang berfungsi untuk menangkap aliran arus, dan terakhir yaitu paket elektronika dengan sistem transmisi menggunakan transmisi ARGOS.
(a) (b)
Gambar 4. (a) Drifter Pesisir Ohlman (2007) ,(b) Drifter Davis milik CODE
91
Gambar 5. DrifterBuoy produksi AOML
Sumber: http://www.aoml.noaa.gov/phod/instrument_development/
2.4. Drag Area Ratio untuk menentukan baik buruknya desain drifter
Gerak drifter berbeda dengan gerak masa air, dimana gerak tersebut sangat ditentukan oleh kemampuan drifter menangkap aliran masa air. Penentuan kemampuan drifter mengikuti masa air ini dapat dihitung menggunakan drag area ratio yaitu perbandingan antara luas permukaan drogue dengan jumlah luas permukaan lain seperti luas bola permukaan dan lainnya. Drag area ratio (R) ini kemudian didefinisikan oleh Niiler et al (1995) yaitu:
∑ ... (1)
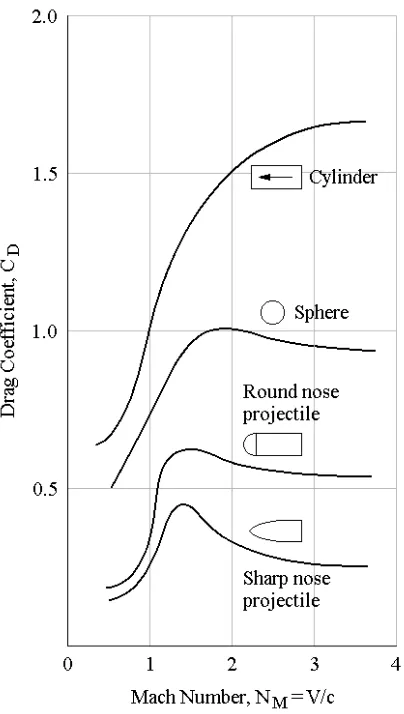
Dimana C adalah nilai drag coefficient dan A adalah proyeksi dari luas area. Koefisien s dan d adalah merupakan sub-index dari setiap komponen yang dihitung dan ikut mempengaruhi pergerakan drifter. Drag coefficient adalah kuantitas berdimensi yang digunakan untuk mengukur hambatan atau perlawanan dari objek di lingkungan fluida seperti udara atau air. Secara sederhana kemudian nilai dari koefisien tersebut dibuat dalam grafik Gambar 6, dimana bentuk silinder memiliki nilai koefisien yang lebih besar dibandingkan dengan bentuk bola dan lainya. Semakin besar nilai koefisien tersebut berarti semakin besar hambatan dari sebuah objek terhadap aliran air.
92
pergerakan drifter mampu mewakili pergerakan masa air dengan ketelitian dibawah 1 cm/s terhadap pergerakan masa air sesungguhnya dimana drifter harus memiliki nilai drag area ratio lebih besar dari 40. Kemudian secara sederhana pada aplikasi drifter perumusan tersebut kemudian ditulis dalam bentuk (Niiler, 1995) berikut:
...(2)
dimana,
...(3)
93
Nilai R ini kemudian dapat digunakan untuk menghitung nilai slip velocity dari drifter dan masa air, dimana pengaruh angin dan gradien vertikal dari arus juga dimasukan, yang ditulis menjadi:
...(4)
Dimana adalah slipvelocity, adalah kecepatan angin dan adalah gradien vertikal dari arus. Dari persamaan (4) terlihat bahwa semakin tinggi nilai R maka semakin kecil slip velocity yang dihasilkan. Menurut Niiler dan Paduan (1995) desain SVP memiliki slip velocity 0.7 cm/s pada saat kecepatan angin 10 cm/s tetapi jika kehilangan drogue maka slip velocity menjadi 8.9 cm/s pada kecepatan angin tersebut. Tabel 3. merupakan contoh perhitungan drag area ratio (Sybandry et al, 2009)
Tabel 3. Perhitungan drag area ratio (contoh)
Component
Other elements except Urethane and pipe on top of radial hub 1.4
Urethane and pipe on top of radial hub 1
Sumber : http://gisweb.wh.whoi.edu/ioos/drift/svpb_design_manual.pdf
2.5. Transmisi dan Format Data Drifter
94
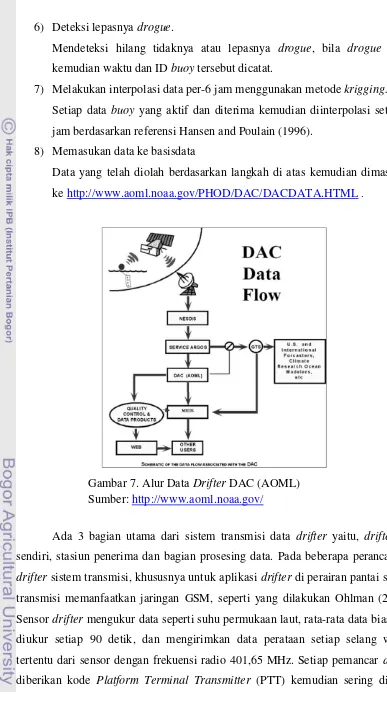
kemudian diteruskan oleh ARGOS ke DAC (AOML) untuk kemudian dilakukan proses pengolahan dan kontrol kualitas data (Gambar 7). Ada beberapa tahapan yang dilakukan untuk melakukan kontrol kualitas data yang dilakukan oleh AOML (Pazos, M. 2003 ) yaitu:
1) Decode data.
Mengkonversi data yang sekarang diterima ke data yang telah ditentukan sesuai dengan metode konversi yang sudah ditentukan yaitu berdasarkan data ID dari buoy yang diterima. Format data ARGOS dalam bentuk binari kemudian di-decode menjadi angka dan nilai yang dimaksud.
2) Indentifikasi buoy baru dan memasukannya ke direktori file.
Menentukan waktu penyebaran dan posisi transmisi dari data yang baik dan diterima pertama kali pada proses pengiriman. Hal ini dilakukan jika ID buoy belum terdeteksi atau merupakan ID baru.
3) Mencari buoy yang mati (tidak mengirimkan data lagi), melihat posisi terakhir dan kenapa buoy tersebut mati.
Menjalankan program yang mampu mengidentifikasi transmisi buoy dari lokasi yang sama atau buoy yang tidak memiliki data baru setelah update terakhir, kemudian memasukan nomor ID buoy tersebut ke direktori file.
4) Melakukan pengecekan sensor SST, waktu terakhir sensor tersebut mengirimkan data yang baik, dan kenapa sensor tersebut gagal.
Setiap data SST yang diterima kemudian dibandingkan dengan Climatology Reynold’s untuk menentukan gagal tidaknya sensor suhu. Waktu terakhir dari buoy tersebut mengirimkan data SST yang baik kemudian dimasukan ke dalam direktori file.
5) Mengedit posisi dan SST.
95
6) Deteksi lepasnya drogue.
Mendeteksi hilang tidaknya atau lepasnya drogue, bila drogue lepas kemudian waktu dan ID buoy tersebut dicatat.
7) Melakukan interpolasi data per-6 jam menggunakan metode krigging. Setiap data buoy yang aktif dan diterima kemudian diinterpolasi setiap 6 jam berdasarkan referensi Hansen and Poulain (1996).
8) Memasukan data ke basisdata
Data yang telah diolah berdasarkan langkah di atas kemudian dimasukan ke http://www.aoml.noaa.gov/PHOD/DAC/DACDATA.HTML .
Gambar 7. Alur Data Drifter DAC (AOML) Sumber: http://www.aoml.noaa.gov/
96
sebagai ID drifter. Sistem penentuan posisi drifter ARGOS bukanlah diberikan GPS. melainkan dihitung berdasarkan pergeseran transmisi Doppler dari waktu sinyal yang dikirimkan drifter seperti yang dijelaskan dalam Manual Pengguna ARGOS. Motyzhev (2007), ada tiga pembagian lokasi yaitu kelas satu (error antara 350-1000 meter), kelas dua (error antara 150-350 meter) dan kelas tiga (error kurang dari 150 meter), sedangkan ORBCOMM dan IRRIDIUM menggunakan GSP untuk penentuan posisi. Jenis komunikasi ARGOS menggunakan komunikasi satu arah artinya tidak ada pengontrolan oleh stasiun darat terhadap drifter, sedangkan pada ORBCOMM dan IRIDIUM mengimplementasikan komunikasi dua arah (Tabel 4).
Tabel 4. Perbandingan sistem drifter dari IRIDIUM, ARGOS dan ORBOCOMM
Perbandinagan ARGOS ORBCOMM IRIDIUM
97
Penggunaan komunikasi GSM untuk transmisi data real-time kelautan mulai dilakukan, hal ini dikarenakan biaya yang dikeluarkan untuk komunikasi ini lebih murah jika dibandingkan transmisi data menggunakan satelit. Kelemahan transmisi data menggunakan jaringan ini yaitu sangat bergantung dengan coverage area dari operator GSM di tempat dilakukan pengukuran. Data real-time seperti buoy yang ditempatkan di pesisir sudah cukup banyak yang mengadopsi jaringan ini seperti terlihat di Tabel 5.
Tabel 5. Perbandingan teknologi buoy untuk ocean monitoring.
Buoy
98
data yang dilakukan. Format data sangat ditentukan oleh kompleksitas perangkat keras terutama jenis dan jumlah sensor serta model komunikasi serta kebutuhan dan kendali sistem. Contoh, ARGOS memiliki panjang format data 56 bit, seperti Tabel 6. Selain data sensor dikirimkan juga tegangan baterai untuk mengetahui kondisi drifter, age untuk waktu dan tanggal data, rank untuk pengenal baris serta checksum untuk memastikan data terkirim sempurna atau tidak.
Tabel 6. Format data ARGOS
2.6. Penentuan Posisi menggunakan GPS
99
(Easton, 1980), dan pengembangannya sampai sekarang ini ditangani oleh Departemen Pertahanan Amerika Serikat, dibawah lembaga yang dinamakan NAVSTAR (Navigation Satellite Timing and Rangin Global Positioning System), dan sistem yang dimiliki oleh Rusia dengan nama GLONASS singkatan dari Global Navigation Satellite System. Sistem yang dapat digunakan oleh banyak orang sekaligus dalam segala cuaca didesain untuk memberikan posisi dan kecepatan dalam tiga dimensi dan juga informasi mengenai waktu secara kontinu diseluruh dunia. Sinyal GPS mengandung tiga informasi yaitu kode pseudorandom, data ephemeris dan data almanak. Sinyal transmisi dari satelit GPS merupakan sinyal identifikasi satelit saat sedang mengirim informasi terhadap GPS Penerima. Selanjutnya GPS penerima menghitung timing waktu rambatan gelombang dari satelite NAVSTAR dengan menghitung selisih timing pulsa antara pseudo random code dari GPS Penerima. Lebar frekuensi (bandwidth) yang dibutuhkan untuk mentransmisikan pseudo random code sekitar 1 MHz, sehingga transmisi sinyal GPS ditransmisikan pada gelombang 20 cm atau sekitar 1.2 -1.5 GHZ.
100
Chipset GPS diproduksi secara massal dengan maksud memberikan kemudahan bagi pengembang instrument dalam berbagai bidang aplikasi yang membutuhkan penentuan posisi. Dengan alasan untuk kompatibilitas berbagai chipset dengan produsen berbeda membuat sebuah standar kalimat yang dikeluarkan oleh sebuah chipset GPS. Sampai saat ini standar kalimat tersebut biasa disebut standar NMEA 0183. Standar NMEA memiliki banyak jenis bentuk kalimat laporan, yang diantaranya berisi data koordinat lintang (latitude), bujur (longitude), ketinggian (altitude), waktu sekarang standar UTC (UTC time), dan kecepatan (speed over ground). Umumnya NMEA-0183 menggunakan komunikasi RS232 sebagai jalur komunikasi dengan perangkat luar seperti komputer atau mikrokontroler dengan beberapa kecepatan (baud rate) yang biasanya dapat diatur. Beberapa jenis kalimat NMEA-0183 yang umum digunakan dapat dilihat pada Tabel 7.
Tabel 7. Jenis kalimat NMEA yang umum digunakan Kalimat Deskripsi
$GPGGA Meminta fixed data dari GPS
$GPGLL Meminta Posisi Latitude dan Longitude $GPGSA GNSSDOP and active satellites $GPGSV GNSS satellites yang tertangkap
$GPRMC Recommended minimum specific GNSS data
Jumlah kalimat NMEA yang didukung oleh sebuah GPS penerima bervariasi, tergantung produsen dan tujuan dari GPS. Chipset GPS penerima umumnya mendukung kelima kalimat NMEA pada Tabel 7. Pada beberapa perancangan tidak semua kalimat NMEA digunakan karena NMEA dirancang sesuai dengan kebutuhan umum pengguna sehingga dengan satu atau lebih kalimat NMEA sudah dapat menyelesaikan masalah yang ingin diselesaikan.
101
"pengendali kecil" dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat dikurangi dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini. Mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena mikrokontroler sudah mengandung beberapa peripheral yang langsung bisa dimanfaatkan, misalnya port paralel, port serial, komparator, konversi digital ke analog (DAC), konversi analog ke digital (ADC) dan sebagainya hanya menggunakan sistem minimum yang tidak rumit atau kompleks.
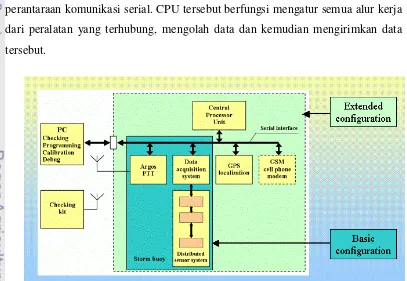
Drifter awalnya menggunakan Central Processing Unit (CPU) atau mikrokontroler yang secara khusus diproduksi oleh produsen Drifter, sehingga mikrokontroler dan sistem transmisi serta penentuan posisi merupakan satu kesatuan. Gambar 8. memperlihatkan struktur elektronik dari “Smart Buoy” yang dikembangkan oleh Motyzhev (2004). Terlihat bahwa pemancar ARGOS, sensor, GPS, dan transceiver GSM bermuara pada satu Central Processing Unit melalui perantaraan komunikasi serial. CPU tersebut berfungsi mengatur semua alur kerja dari peralatan yang terhubung, mengolah data dan kemudian mengirimkan data tersebut.
102
Seiring dengan makin murahnya harga mikrokontroler dengan fasilitas tambahan yang sangat memadai misalnya sebagai perantara komunikasi serial internal. Beberapa perancang melakukan perancangan dengan menggunakan mikrokontroler komersial, misalnya Perez C. (2003), yang menggunakan RCM2300 dari Rabbit Semiconductor. Dalen et al. (2004) menggunakan MC 1460 CE2 mikrokontroler keluaran perusahaan MOTOROLA. Aplikasi tersebut pada umumnya memiliki sistem diagram yang sederhana seperti Gambar 9, dimana mikrokontroler dihubungkan dengan beberapa alat seperti GPS, RF transmitter dan sensor serta kemudian mengaturnya dalam cara kerja yang diinginkan oleh pembuat.
Gambar 9. Sistem diagram yang dibangun dari drifter wireless oleh Yu-Dong. Sumber:http://www.ece.stevens-tech.edu/
Salah satu tipe mikrokontroler yang sering dan banyak digunakan karena kecepatannya yang tinggi, harga yang relatif murah dengan fasilitas tambahan yang cukup banyak yaitu mikrokontroler seri AVR ATMEGA keluaran perusahaan ATMEL. Mikrokontroler AVR merupakan mikrokontroler keluaran perusahaan ATMEL coorporation yang memiliki arsitektur RISC 8 Bit, semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam satu siklus instruksi clock. AVR dikelompokkan kedalam 4 kelas, yaitu ATtiny, keluarga AT90Sxx, keluarga ATMega, dan keluarga AT86RFxx. Dari semua kelas yang membedakan satu sama lain adalah ukuran onboard memori, onboard peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan semua kelas ini bisa dikatakan hampir sama.
Microcontroler, data log
GPS Receiver RF
Transmiter
103
Beberapa arsitektur dasar yang dimiliki oleh ATMega32 yaitu:
Saluran IO sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D
ADC 10 bit sebanyak 8 Channel
Tiga buah timer / counter
32 register
Watchdog Timer dengan oscillatorinternal
Memori Flash sebesar 8 kb
Sumber Interrupt internal dan eksternal
Port SPI (Serial Pheriperal Interface)
Komparator analog
Port USART (Universal Synchronous Asynchronous Receiver Transmitter)
Sistem prosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
Ukuran memory flash 8KB, SRAM sebesar 512 byte, EEPROM sebesar 512 byte.
Mode Sleep untuk penghematan penggunaan daya listrik
Di Indonesia mikrokontroler ini cukup terkenal, banyak digunakan dan mudah didapatkan dikarenakan harga yang murah dan mudah digunakan. Fitur yang lengkap juga menjadi alasan mengapa mikrokontroler ini banyak digunakan. Fitur-fitur yang sering digunakan khusunya untuk perancangan instrument di bidang kelautan seperti ADC (Analog to Digital Converter) biasa digunakan untuk mengkonversi sinyal analog sensor. USART biasanya digunakan untuk komunikasi dengan peralatan lain seperti GPS dan Modem GSM. EEPROM biasa digunakan untuk penyimpanan data (data logger).
2.8. Modem GSM sebagai Pengirim dan Penerima data
104
mendukung satu atau lebih dari protokol dalam evolusi keluarga GSM, termasuk teknologi 2.5G GPRS dan EDGE, serta 3G teknologi WCDMA,UMTS, HSDPA dan HSUPA (Mouly et al. 1992).
Saat ini banyak sekali produsen modem GSM dengan bentuk dan fasilitas produk yang berbeda. Fasilitas seperti GPS-pun kemudian dimasukan kedalam sebuah modem GPS oleh beberapa produsen modem GSM (Gambar 10), hal ini dimaksudkan karena sifat komunikasi GSM yang bisa dilakukan dimanapun dapat digabungkan dengan kemampuan pengukuran posisi GPS.
(a) (b)
Gambar 10 . Modem GSM produksi Wavecom inc (a), Modem GSM dengan GPS build-in produksi SIMCom inc (b)
Sebuah modem GSM memaparkan sebuah antarmuka yang memungkinkan aplikasi komputer atau peralatan lain untuk mengirim dan menerima pesan melalui antarmuka modem. Agar dapat melaksanakan tugas ini, modem GSM harus mendukung sebuah extended perintah AT set seperti yang didefinisikan dalam spesifikasi GSM 07.05 dan ETSI dan 3GPP TS 27,005 (Smith Clint dan Daniel Collins. 2002).
105
bangun dan lingkungan kelautan, seperti AANDERA sebuah perusahaan produsen instrumen kelautan terkemuka kemudian mengeluarkan produk yang berbasis modem GSM Wavecom.inc seperti terlihat pada Gambar 11. Pada gambar modem diletakkan dalam sebuah box yang terlindung rapi untuk menghindari udara lembab dan air, memiliki mounting plate sehingga mudah ditempatkan dan tidak terguncang. Modul modem tersebut digunakan untuk transmisi data dari produk instrumen yang dikeluarkan AANDERA.inc seperti drifter buoy, buoy, tide instrumen dan lainnya.
Gambar 11. GSM Communication unit 3742 berisi modem GSM produksi Wavecom.inc digunakan AANDERA.inc sebagai transmitter data produk yang dimilikinya.
Sumber: http://www.aadi.no/../GSM%20Communication%20Unit.pdf
2.8.1 Standar Pengantarmukaan Modem GSM (AT-COMMAND)
106
modem Hayes yang sudah ada. Dinamakan AT-Command karena semua perintah diawali dengan karakter A dan T. Antar perangkat ponsel dan modem GSM/CDMA bisa memiliki AT-Command yang berbeda-beda, namun biasanya mirip antara satu perangkat dengan perangkat lain. Untuk dapat mengetahui secara persis maka kita harus mendapatkan dokumen teknis dari produsen pembuat ponsel atau modem GSM/CDMA tersebut.
Beberapa perintah AT-Command yang biasanya digunakan (Tabel 8) dalam pembuatan penerima dan pengirim SMS mengikuti spesifikasi GSM 07.05 dan ETSI dan 3GPP TS 27,005.
Tabel 8. Jenis kalimat AT-COMMAND sebuah modem GSM Standar AT Command Keterangan
AT Mengecek apakah modem telah terhubung
AT+CMGF Untuk menetapkan format mode dari terminal
AT+CSCS Untuk menetapkan jenis encoding
AT+CNMI Untuk mendeteksi pesan SMS baru masuk secara otomatis
AT+CMGL Membuka daftar SMS yang ada pada SIM Card AT+CMGS Mengirim pesan SMS
AT+CMGR Membaca pesan SMS
AT+CMGD Menghapus pasan SMS
ATE1 Mengatur ECHO
AT+CGMI Mengecek Merk HP
AT+CGMM Mengecek Seri HP
AT+CGMR Mengecek Versi Keluaran HP
AT+CBC Mengecek Baterai
AT+CSQ Mengecek Kualitas Sinyal
107
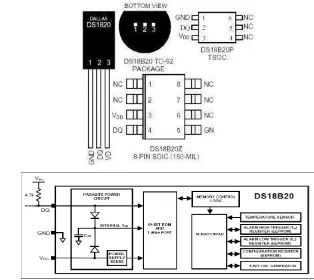
2.9. Sensor Suhu DALLAS DS18B20
108
Gambar 12. Bentuk fisik dan peta memori sensor suhu DS18B20
Penggunaan sensor ini untuk aplikasi drifter di ujicobakan oleh Motyzhev (2010) dengan akurasi pengukuran sebesar 0.2 0C dan waktu pembacaan 20 detik untuk sepuluh buah sensor yang disimpan pada 10 strata kedalaman. Olda bondarenko et al (2007), menggunakan array sensor ini untuk aplikasi buoy, dimana sensor ini ditempatkan untuk beberapa kedalaman memanfaatkan komunikasi 1-wire yang dimiliki DS18B20.
2.10. Media Penyimpanan Data MMC/SD Card
109
drive. Dari format serial interface, MMC/SD adalah yang paling mudah untuk ditanamkan. Format SD card dilindungi oleh hak paten, lisensi, dan spesifikasi yang tidak dipublikasikan secara terbuka. Namun, semua memori SD dan kartu SDIO yang diperlukan mendukung komunikasi SPI (Serial Programming Interface) yaitu interface 4 jalur yang sedikit lebih lambat (clock, serial, serial out, chip select) dan kompatibel dengan port SPI pada banyak mikrokontroler.
2.11. Biaya Implementasi dan Biaya Rancang bangun Drifter
Implementasi drifter dibagi menjadi beberapa bagian biaya yaitu harga alat drifter itu sendiri, biaya transmisi data dan biaya server ground segment. Drifter SVP berharga $1500 dengan biaya transmisi $15 per-hari transmisi (Sybandri, 2009). Drifter Davis seharga $1200, dengan transmisi menggunakan satelit ORBOCOM yaitu $30 untuk biaya aktivasi dan $2.35 biaya per-bulan.
Implementasi menggunakan transmisi GSM lebih murah dibandingkan dengan transmisi via satelit seperti satelit ARGOS, ORBCOMM dan IRRIDIUM yaitu mendekati $0.5 perhari (Ohlmann, 2005). Pada perancangan sendiri biaya implementasi mendekati $1000 seperti yang dilakukan Yu-dong (2007), drifter yang dirancang menggunakan gelombang RF sendiri sehingga tidak memiliki biaya transmisi (Tabel 9)
Tabel 9. Biaya pembuatan drifter Wireless Yu-dong (2007)
110
hanya cukup menggunakan sebuah komputer dan alat penerima data, seperti modem GSM pada aplikasi yang menggunakan transmisi GSM, atau penerima RF untuk aplikasi yang menggunakan transmisi radio frequency (RF).
2.12. Keadaan Umum di Perairan Teluk Pelabuhan Ratu
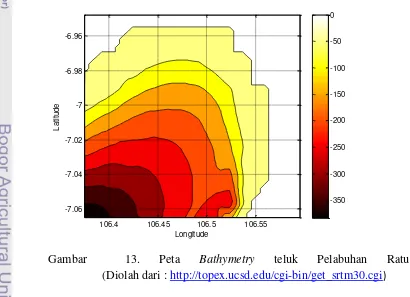
Teluk Pelabuhan Ratu merupakan teluk terbesar di pantai selatan Jawa yang berhadapan langsung dengan Samudera Hindia. Perairan Teluk Pelabuhan Ratu merupakan tempat bermuaranya 4 sungai yakni sungai Cimandiri, sungai Cibareno, Sungai Ciletuh dan sungai Cikanteh. Dasar perairan ini cukup curam dimana di sepanjang pantai teluk, kedalaman relatif dangkal dan semakin dalam pada bagian tengah sampai ke arah mulut teluk (Gambar 13). Kedalaman perairan pada bagian dangkal mencapai 100 meter dan berjarak 2 sampai 3 km dari pantai kearah tengah teluk. Perairan pada bagian tengah teluk mencapai kedalaman 300 meter yang terus semakin dalam ke arah mulut teluk yang mencapai kedalaman 1500 meter.
Gambar 13. Peta Bathymetry teluk Pelabuhan Ratu
(Diolah dari : http://topex.ucsd.edu/cgi-bin/get_srtm30.cgi)
Arus Teluk Pelabuhan Ratu
111
sehingga dapat terjadi arus, yaitu gaya eksternal dan gaya internal. Gaya eksternal terdiri dari angin, perbedaan tekanan udara, gaya gravitasi, gaya tektonik, gaya tarik matahari dan bulan yang dipengaruhi oleh tahanan dasar laut dan gaya coriolis, sedangkan gaya internal dari perbedaan densitas air laut, gradien tekanan mendatar dan gesekan lapisan air (Gross, 1979).
Purba (1995) melaporkan dari hasil pemodelan pada penelitianya bahwa pola arus hasil simulasi menunjukan bahwa faktor pasang surut dan faktor angin bersama-sama mempengaruhi kondisi hidrodinamika di perairan teluk Pelabuhan Ratu. Penelitian tersebut juga menjelaskan adanya perbedaan pola elevasi saat air pasang dan surut. Saat air pasang, penumpukan massa air hanya terjadi di titik Ujung Karang Taraje (bagian barat teluk), sedangkan bagian dalam teluk memperlihatkan nilai elevasi yang lebih rendah dibandingkan elevasi di titik ujung Karang Taraje. Saat air surut pola elevasi memperlihatkan nilai garis kontur pada bagian dalam teluk lebih tinggi dibandingkan dengan nilai garis kontur pada bagian mulut teluk. Hal ini menunjukan massa air pada bagian dalam teluk mengalir keluar menuju mulut teluk.
Pasang Surut Teluk Pelabuhan Ratu
Hasil pengamatan pasang surut pada penelitian terdahulu di Teluk Pelabuhan Ratu memberikan kesimpulan bahwa tipe pasang surut perairan teluk Pelabuhan Ratu adalah pasang surut campuran cenderung semi diurnal (Pariwono et al., 1988; Palit 1992). Pariwono (1985) dalam studinya tentang pasut di perairan Asia Tenggara menyatakan bahwa, di Samudera Hindia komponen pasut M2 dan K1 merambat dari bagian barat menuju timur, ketika memasuki perairan teluk Pelabuhan Ratu komponen pasut tersebut diduga akan merambat melalui alur yang dalam karena di kawasan tersebut tahanan dasarnya kecil. Hatayama et al. (1996) dalam penelitiannya juga mendapatkan hasil yang sama bahwa di Samudera Hindia, komponen pasut M2 dan K1 merambat dari bagian barat menuju timur.
112
113
114
3. METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian
Perancangan dan pembuatan sistem serta analisis data pada penelitian ini dilaksanakan di laboratorium Instrumentasi dan Telemetri Kelautan Bagian Akustik dan Instrumentasi Kelautan, Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Penulisan proposal dilakukan mulai Agustus sampai Desember 2009 dan kegiatan penelitian dilakukan mulai Januari sampai Agustus 2010, sedangkan uji coba lapang dilakukan di teluk Pelabuhan Ratu Propinsi Jawa Barat, dilaksanakan pada tanggal 28 dan 30 Agustus 2010.
3.2. Bahan dan Alat Penelitian
Adapun bahan dan alat penelitian ini dapat dirinci sebagai berikut: a) Bahan Komponen Elektronika
Mikrokontroler ATMega32, berfungsi sebagai pusat pengatur kerja, pengolah data dan tempat perangkat lunak ditanamkan Modul GSM tipe Fastrack M1306B produksi Wavecom, berfungsi
sebagai pengirim data dan penerima perintah dari stasiun darat. GPS tipe PMB-648 produksi Parallax, sebagai sensor posisi
dengan memberikan koordinat secara berkala ke mikrokontroler. Modul MMC/SD Card, sebagai media penyimpanan data dan
tempat file konfigurasi dari buoy.
IC MAX232, sebagai pengantarmuka bagi komunikasi RS232 yaitu komunikasi modem GSM dengan mikrokontroler
Sensor suhu DS18B20 produksi DALLAS, sensor suhu digital dengan output digital 12-bit menggunakan komunikasi 1-wire Komponen pasif: resistor, kapasitor berfungsi sebagai komponen
yang secara pasif mendukung komponen aktif seperti mikrokontroler dan IC MAX232.
115
b) Bahan Penyusun Wahana Buoy
Bola Buoy, digunakan sebagai tempat bagian elektronika dan pemberi daya apung keseluruh bagian instrument yang dirancang. Resin dan Katalis Resin, sebagai penyambung dari bola buoy yang
sebelumnya dipotong kemudian ditempatkan komponen elektronika sehingga terbentuk sesuai keinginan dan kedap air. Parasut (tirai), berfungsi sebagai penangkap aliran arus permukaan. Besi, berfungsi memperkokoh parasut sehingga tidak berubah
bentuk.
c) Peralatan perancangan dan uji coba sistem
Komputer / Laptop, digunakan untuk pembuatan perangkat lunak, penerima data dan pengirim perintah ke drifter serta untuk pengolahan data hasil perekaman drifter.
BASCOM AVR (Pembuatan Program Mikrokontroler) merupakan compiler berbasis sistem operasi Windows yang mampu merubah kode bahasa BASIC menjadi perintah mesin berbasis mikrokontroler ATMEL AVR.
Delphi 7 (Pembuatan Program Penerima Data) merupakan compiler untuk pembuatan perangkat lunak desktop sistem operasi windows.
d) Peralatan Analisis data
Perangkat lunak Spreadsheet Microsoft Office Excel.
MATLAB, perangkat lunak untuk komputasi digunakan untuk mempermudah proses perhitungan dan visualisasi data.
e) Sumber Data Pendukung
116
3.3. Alur Penelitian
Berikut ini diuraikan beberapa tahapan dalam melakukan penelitian ini: a) Tahap Perancangan dan Perakitan Sistem Buoy
Pada tahap ini ada tiga langkah utama yang dilakukan yaitu:
Rancang bangun sistem elektronika buoy: Sistem elektronika ini terdiri atas GPS dan Modem GPS dengan mikrokontroler sebagai pengendali kerja dilengkapi dengan sistem penyimpanan data serta sensor suhu. Pada perancangan ini sistem harus mampu mengukur data posisi dan suhu.
Rancang bangun wahana: wahana yaitu pelampung sebagai tempat bagi sistem elektronika sehingga sistem tersebut mampu mengukur dengan baik data posisi dan suhu.
Rancang bangun sistem penerima data: data dikirimkan oleh buoy menggunakan jaringan GSM berupa SMS (Short Message Services) dengan format tertentu. Sistem ini terdiri atas komputer/laptop, modem GSM dan program penerima.
b) Tahap Uji Coba Laboratorium dan Analisis Kerja Sistem
Sebelum sistem diuji coba di lapangan perlu dipastikan apakah sistem sudah sesuai dengan yang diharapkan, oleh karena itu setelah proses rancang bangun sistem selesai dibangun, perlu dilakukan uji coba di laboratorium. Ada beberapa parameter penting yang diperhatikan dalam uji coba ini yaitu ketelitian pengukuran posisi GPS, ketelitian pengukuran suhu, daya apung buoy, umur sumber energi (accu), kinerja sistem penyimpanan data serta sistem transmisi data.
c) Tahap Uji Coba Lapangan
117
pasang tertinggi sehingga diharapkan buoy akan menuju kearah pantai. Uji coba lapangan ini dilakukan selama 2 hari.
d) Tahap Analisis Data
Ada beberapa langkah yang dilakukan dalam proses analisis hasil yaitu: Statistik data hasil perekaman : jumlah data baik yang disimpan
dan dikirimkan oleh drifter akan berbeda pada setiap operasi. Data signifikan yang terjadi juga berbeda dikarenakan perbedaan waktu untuk setiap perubahan posisi dari GPS. Konsumsi daya juga akan berbeda terutama disebabkan oleh perbedaan lama operasi. Parameter-parameter tersebut kemudian ditabulasi sehingga dapat dinilai kinerja sistem pada setiap percobaan.
Pembuatan trajecktori hasil drifter: dilakukan untuk melihat gerak Drifter secara spasial baik kecepatan maupun arah pergerakan. Pembuatan Stick plot berdasarkan posisi aktual: Besar arah dan
kecepatan kemudian di plot berdasarkan waktu (sumbu-x) untuk melihat pola pergerakan drifter waktu ke waktu selama percobaan. Analisis pasang surut: analisis ini dilakukan untuk melihat
pengaruh pasang surut terhadapa pergerakan drifter. Stick plot yang telah dibuat pada setiap percobaan kemudian dibandingkan dengan grafik pasang surut sehingga dapat terlihat pergerakan air pada setiap ketinggian pasang dan surut.
3.4. Rancang Bangun Wahana Buoy
118
dibor untuk menempatkan sensor suhu dan dilapisi resin kembali agar kedap air. Parasut menggunakan jaring padat dimana kedua bagian ujung dan tengah ditambahkan lingkaran besi untuk memperkokoh dan mempertahankan bentuk parasut. Diameter parasut atau lingkaran besi yang digunakan yaitu 30 cm dan pada setiap bagian tengah besi dihubungkan dengan tali nylon hingga ke bagian pelampung. Gambar 14 merupakan model desain dari drifter yang dikembangkan, pada bagian atas terdapat bola buoy, dengan tiang atas untuk menempatkan GPS, serta antena GSM. Pada bagian bawah terdapat drogue yang didalamnya terdapat lingkaran besi untuk mempertahankan bentuk drogue. Bola pelampung yang digunakan berdiameter 30 cm, panjang parasut 2 m, jarak antara parasut dan pelampung 50 cm dan tinggi tiang GPS yaitu 15 cm.
Keterangan:
(a) GPS (e) Tali Penyambung pelampung dan parasut (b) Antena GSM (f) Besi Pembentuk parasut
(c) Kontrol Panel (g) Parasut (d) Pelampung Permukaan
119
3.5. Rancang Bangun Perangkat Keras Elektronik Buoy
Perangkat elektronik buoy terdiri atas beberapa bagian utama yaitu catu daya yang diambil dari accu, mikrokontroler sebagai pusat pengendali dan pengolah data, modul GPS sebagai sensor posisi dan kecepatan, sensor suhu DS18B20, modul GSM sebagai transceiver data, dan modul data logger sebagai penyimpan dan backup data. Adapun skema hubungan fungsional dari semua bagian tersebut dapat dilihat pada Gambar 15. Komunikasi mikrokontroler dengan GPS bersifat searah yaitu GPS secara kontinu memberikan data NMEA secara terus menerus, sedangkan komunikasi mikrokontroler dengan Modul GSM bersifat dua arah, artinya disamping memberikan data ke mikrokontroler modem GSM juga dapat dikendalikan. Sensor suhu memberikan data ke mikrokontroler setelah mikrokontroler meminta (memberikan perintah). Catu daya yang digunakan adalah aki 12 volt sebesar 7AH (Ampere Hour). Setiap modul memiliki level tegangan masing-masing dalam bekerja, oleh karena itu diperlukan regulator (level converter) tegangan untuk menyesuaikan dengan kebutuhan masing-masing.
Catu daya Accu 12 V dan Level Converter
Mikrokontroller ATMega32
Modul GPS
Modul GSM Modul Data
Logger
Sensor suhu DS18B20
120
3.6. Desain Perangkat Lunak Sistem Drifter Buoy
Perangkat lunak yang ditanamkan di buoy berbasis mikrokontroler, sehingga baik ukuran program, bahasa dan tools pemrograman dilakukan sesuai dengan mikrokontroler yang digunakan yaitu mikrokontroler ATMega32. Perangkat lunak penerima yaitu perangkat lunak pada bagian server penerima data yaitu komputer yang dilengkapi modem GSM dan nomor yang di-set sebagai nomor penerima data sehingga data yang dikirimkan drifter dapat diterima dan disimpan dengan baik.
Perangkat Lunak Buoy
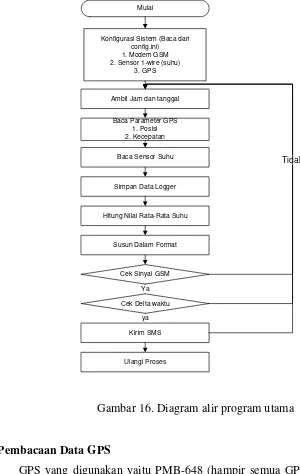
Perangkat lunak yang ditanamkan di buoy terdiri atas beberapa fungsi utama yaitu mengakuisisi data yang dibutuhkan, menyimpan data dan mengirimkannya. Perangkat lunak ini dibangun menggunakan bahasa pemrogram BASIC BASCOM AVR yang merupakan bahasa pemrograman untuk mikrokontroler AVR. Perangkat lunak ini terdiri atas dua alur program yaitu alur program utama dan alur program interupsi (SMS konfigurasi). Adapun kedua alur tersebut terlihat pada Gambar 16 dan 17. Pada saat dinyalakan mikrokontroler melakukan konfigurasi terutama untuk perangkat luar yang digunakan yaitu modem GSM, sensor suhu dan perangkat internal yaitu vektor interupsi RS232 yang digunakan untuk mendeteksi interupsi SMS masuk. Selama tidak ada interupsi mikrokontroler melakukan kegiatan rutin yaitu membaca data GPS berupa posisi, jam dan tanggal serta kecepatan. Selanjutnya membaca sensor suhu dan kemudian selama 300 data (5 menit) data posisi dan kecepatan terakhir, serta suhu yang telah di rata-ratakan akan dikirim melalui modem GSM menggunakan perintah AT-command.
121
Gambar 16. Diagram alir program utama
Pembacaan Data GPS
GPS yang digunakan yaitu PMB-648 (hampir semua GPS yang diproduksi) memiliki fasilitas komunikasi RS232 dan menggunakan standar komunikasi NMEA-0183. Adapun perintah NMEA yang digunakan untuk pembacaan posisi dan kecepatan serta tanggal dan jam UTC yaitu $GPRMC. Contoh sebuah keluaran NMEA seperti berikut:
Format keluaran dari $GPRMC dapat dideskripsikan sebagai berikut (contoh)
dimana penjelasan dari format NMEA tersebut seperti terlihat pada Tabel 10.