“ PENGATURAN LEVEL PADA TANGKI LATEKS DENGAN MENGGUNAKAN SISTEM PNEUMATIK “
(Aplikasi PT.Medisafe Technologies) O
L E H
Erwin Sitanggang Nim. 02 5203 005
PROGRAM STUDI TEKNOLOGI INSTRUMENTASI PABRIK FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
KATA PENGANTAR
Pertama sekali penulis mengucapkan puji dan syukur kehadirat Tuhan
Yang Maha Esa atas berkat dan rahmatNya penulis dapat menyelesaikan
penulisan karya akhir ini. Karya akhir ini adalah tugas akhir yang harus
diselesaikan oleh setiap mahasiswa sebagai salah satu syarat untuk memperoleh
gelar Sarjana Sains Terapan pada Fakultas Teknik Universitas Sumatera Utara.
Adapun judul karya akhir ini adalah “Pengaturan Level Pada Tangki Lateks
Dengan menggunakan Sistem Pneumatik”.
Dalam penulisan karya akhir ini penulis banyak menemui kendala, namun
berkat adanya bimbingan, saran-saran, nasihat dan bantuan moril maupun materil
dari berbagai pihak, akhirnya penulis dapat menyelesaikan Karya Akhir ini
dengan baik.
Maka pada kesempatan ini perkenankanlah penulis terlebih dahulu
mengucapkan banyak terima kasih yang sebesar-besarnya kepada :
1. Ayahanda dan Ibunda tercinta yang senantiasa memberikan semangat dan
dukungan serta doa yang tulus kepada penulis.
2. Bapak Dr. Ir. Armansyah Ginting, M.Eng, Selaku Dekan Fakultas Teknik
Universitas Sumatera Utara.
3. Bapak Prof. Dr. Ir. Usman Baafai, selaku Ketua Program Diploma – IV
Teknologi Instrumentasi Pabrik Universitas Sumatera Utara.
4. Bapak Ir. Riswan Dinzi, MT, selaku dosen pembimbing penulis yang telah
5. Bapak Ir. T. Ahri Bariun, selaku Koordinator Program Diploma – IV
Teknologi Instrumentasi Pabrik.
6. Seluruh Dosen dan Staf Program Diploma – IV Teknologi Instrumentasi
Pabrik.
7. Semua rekan-rekan mahasiswa TIP ’02, N’do Goeltom yang juga banyak
memberikan dukungan kepada penulis.
Penulis menyadari bahwa karya akhir ini masih ada terdapat
kekurangan-kekurangan dan masih jauh dari kesempurnaan dikarenakan keterbatasan
pengetahuan dan wawasan dalam ruang lingkup pembelajaran. Untuk itu penulis
sangat mengharapkan kritik dan saran sebagai penyempurnaan dari Karya Akhir
ini.
Semoga Karya Akhir ini ada manfaatnya bagi kita semua terutama bagi
penulis sendiri.
Medan, Januari 2008
Penulis
( Erwin Sitanggang)
DAFTAR ISI
BAB II : TINJAUAN TEORITIS 2. 1. Dasar – dasar Pneumatik ... 5
2. 3.2. Sensor Kedekatan Kapasitif ... 12
2. 4. Katup Kontrol ... 13
2. 4.1. Katup Kontrol Arah ... 13
2. 4.2. Katup Kontrol Aliran ... 13
2. 4.3. Katup Kontrol Tekanan ... 14
2. 4.4. Katup Kombinasi ... 15
2. 5. Aktuator dan Alat Keluaran ... 15
2. 6. Sistem Kontrol ... 17
2. 6.1. Proses Kontrol ... 18
2. 6.2. Kontrol Manual dan Otomatik ... 20
2. 6.3. Rangkaian Terbuka dan Rangkaian Tertutup ... 21
BAB III. SISTEM PNEUMATIK 3. 1. Pengertian Sistem Pneumatik ... 23
3. 2. Proses Kontrol Pneumatik ... 25
3. 3. Mekanisme Kerja Sebuah Aktuator ... 29
3. 4. Prinsip Umum Operasi ... 31
BAB IV. ANALISA SISTEM 4. 1. Elemen Pneumatik ... 34
4. 2. Proses Pengaturan Level Pada Tank Lateks ... 37
4. 3. Aktuator sebagai Elemen Pengendali Akhir ... 39
4. 4. Spesifikasi Alat ... 40
BAB V. KESIMPULAN DAN SARAN
5. 1. Kesimpulan ... 44
5.2. Saran ... 44
DAFTAR GAMBAR
Halaman
Gambar 2.1. Tekanan Udara ……… 5
Gambar 2.2. Hubungan antara Tekanan dan Vakum ……….. 6
Gambar 2.3. Tangki Udara ……….. 8
Gambar 2.4. Sistem Distribusi Udara ………. 9
Gambar 2.5. Sensor Kedekatan (Proximity) ………... 10
Gambar 2.6. Sensor Kedekatan Induktif ………. 11
Gambar 2.7. Sensor Kedekatan Kapasitif ………... 13
Gambar 2.8. Kontroler Beropersi Otomatis ……… 18
Gambar 2.9. Diagram blok sistem kontrol rangkaian terbuka ……… 22
Gambar 2.10. Diagram blok sistem kontrol rangkaian tertutup ……… 22
Gambar 3.1 Komponen Sistem Pneumatik ……….. 23
Gambar 3.2 Sistem Tekanan ……… 25
Gambar 3.3. Kontrol Loop Tertutup ……….... 26
Gambar 3.4. Pengontrol Proporsional saja ……….. 27
Gambar 3.5 Pengontrol Proporsional Puls Integral (P + I) ……….. 28
Gambar 3.6 Aktuator Fail-up ………... 29
Gambar 3.7 Aktuator fail-down ………... 30
Gambar 3.8 Pengatur posisi Katup ………... 31
Gambar 3.9 Sebuah contoh pengurutan; silinder berosilasi antara LS1 dan LS2 ……… 32
Gambar 4.1 Aliran Sinyal ……… 34
Gambar 4.2 Elemen Pneumatik ……… 35
Gambar 4.3 Diagram rangkaian dari elemen-elemen pneumatic ……… 36
Gambar 4.4 Blok diagram pengaturan level ……… 37
DAFTAR LAMPIRAN
Double Acting Cylinder, Festo Pneumatic
Pneumatically Actuated Valves, Festo Pneumatic
ABSTRAK
Dalam Proses pembutan sarung tangan terdapat berbagai jenis unit
pengolahan yang terintegrasi satu sama lain secara sistematik dan rasional. Untuk
itu diperlukan pengawasan (monitoring) yang terus-menerus terhadap operasi
tersebut dan intervensi dari luar (control) untuk menjamin tercapainya hasil yang
maksimal.
PT. Medisafe Technologies adalah salah satu pabrik yang
mengolah/memproduksi sarung tangan dari bahan baku lateks, yang mana salah
satu proses kontrol yang diperlukan adalah pengontrolan level lateks.
Lateks sebagai bahan baku pembuatan sarung tangan memiliki kekentalan
yang berbeda terhadap zat-zat/cairan yang lain, maka diperlukan pengontrolan
dengan mengunakan sistem pneumatik yang didalamnya terdapat beberapa
alat/instrument pendukung seperti kompresor, sensor proximity sebagai
pendeteksi dari level lateks tersebut yang kemudian dikirim ke bagian kontroller
dan dilanjutkan pada sebuah aktuator jenis pneumatik yang secara bersama-sama
akan membentuk sebuah ‘control sistem’. Sehingga tingkat pengaturan terhadap
ABSTRAK
Dalam Proses pembutan sarung tangan terdapat berbagai jenis unit
pengolahan yang terintegrasi satu sama lain secara sistematik dan rasional. Untuk
itu diperlukan pengawasan (monitoring) yang terus-menerus terhadap operasi
tersebut dan intervensi dari luar (control) untuk menjamin tercapainya hasil yang
maksimal.
PT. Medisafe Technologies adalah salah satu pabrik yang
mengolah/memproduksi sarung tangan dari bahan baku lateks, yang mana salah
satu proses kontrol yang diperlukan adalah pengontrolan level lateks.
Lateks sebagai bahan baku pembuatan sarung tangan memiliki kekentalan
yang berbeda terhadap zat-zat/cairan yang lain, maka diperlukan pengontrolan
dengan mengunakan sistem pneumatik yang didalamnya terdapat beberapa
alat/instrument pendukung seperti kompresor, sensor proximity sebagai
pendeteksi dari level lateks tersebut yang kemudian dikirim ke bagian kontroller
dan dilanjutkan pada sebuah aktuator jenis pneumatik yang secara bersama-sama
akan membentuk sebuah ‘control sistem’. Sehingga tingkat pengaturan terhadap
BAB I PENDAHULUAN
1. 1. Latar Belakang
Pada sebuah pengontrolan dalam proses produksi sering terdapat
pembandingan terhadap beberapa sifat/karakteristik instrument yang digunakan.
Pembandingan yang sering digunakan adalah jenis hidrolik dan pneumatik yang
dapat digunakan sebagai dasar pemilihan instrument yang tepat. Penggunaan
instrument jenis pneumatik sudah lama sekali membantu dalam pelaksanaan
pekerjaan mekanis sederhana. Bahkan sekarang ini memegang peranan yang
penting dalam bidang otomasi.
Sebagian besar aplikasi memanfaatkan pneumatik sebagai salah satu atau lebih
fungsi dari :
Sensor untuk menentukan status proses
Pengolah informasi (kontroller)
Pengaktifan aktuator melalui elemen kontrol.
Pengembangan sensor, prosesor dan aktuator memungkinkan munculnya berbagai
sistem pneumatik.
PT. Medisafe Technologies didalam memproduksi sarung tangan memiliki
sistem pengontrolan untuk mendeteksi/mengatur level pada sebuah tangki lateks,
yaitu sistem pneumatik. Dengan tujuan untuk mendapatkan kestabilan level dalam
sebuah tangki lateks tersebut.
Dalam sistem pneumatik yang digunakan untuk pengontrolan tingkat
kestabilan lateks tersebut terdiri dari kompresor sebagai pasokan energi, sensor
hasil pendeteksian ini dikirim ke bagian kontroller dan dilanjutkan ke aktuator
jenis pneumatik sebagai alat aktuasi(keluaran), sehingga proses ini membentuk
sebuah loop pengontrolan.
Berdasarkan hal tersebut penulis merasa tertarik untuk membahasnya dan
membuatnya dalam sebuah karya akhir dengan judul : “ Pengaturan Level Pada
Tangki Lateks Dengan Menggunakan Sistem Pneumatik ”.
1. 2. Tujuan Pembahasan
Adapun tujuan pembahasan Karya Akhir ini adalah :
1. Mengetahui cara kerja secara umum dengan sistem pneumatik
2. Dapat mengetahui bagaimana proses pengaturan level pada sebuah
tangki lateks tersebut.
3. Mengetahui keuntungan memakai sistem pneumatik.
1. 3. Rumusan Masalah
Adapun Rumusan Masalah dalam penulisan karya akhir ini adalah :
1. Bagaimana sensor Proximity dalam mendeteksi level lateks tersebut
2. Bagaimana proses kerja sistem pneumatik dalam pengaturan level pada
tangki lateks
3. Bagaimana proses aktuasi dalam proses tersebut dengan alat aktuator
4. Berapa besarnya tekanan udara dalam proses tersebut
1. 4. Batasan Masalah
Pada penulisan karya akhir ini penulis hanya membahas cara kerja sistem
pneumatik dan cara kerja sensor proximity dalam mendeteksi level pada tangki
lateks dan juga alat aktuator sebagai alat aktuasi dalam proses, tidak membahas
perhitungan secara mendetail.
1. 5. Metode Pembahasan
Dalam membahas sebuah karya akhir ini, tentunya kelengkapan sebuah data
sangat diperlukan. Maka penulis melakukan metode pengumpulan data sebagai
berikut :
1. Secara Teoritis
Mengumpulkan data-data yang sesuai, serta mencari buku-buku yang
sesuai sebagai dasar referensi penulis dan mempelajarinya.
2. Secara Praktis
Melakukan riset serta wawancara langsung dengan pembimbing di
industri dan observasi ke lapangan.
1. 6. Sistematika Penulisan
Untuk mempermudah pemahaman dan pembahasan, penyusun membuat
sistematika penulisan dengan urutan sebagai berikut :
BAB I. Pendahuluan
Bab ini menjelaskan tentang latar belakang masalah, tujuan pembahasan,
batasan masalah, rumusan masalah, metode pembahasan, dan sistematika
4
BAB II. Dasar Teori
Bab ini berisi tentang teori dasar pneumatik, kompresor, sensor proximity,
katup kontrol , aktuator pneumatik, sistem Kontrol.
BAB III. Penggunaan Pneumatik Sistem dalam proses
Bab ini berisi tentang pengertian sistem pneumatik, prinsip umum operasi,
kontrol pneumatik, dan mekanisme kerja sebuah aktuator.
BAB IV. Analisa Sistem
Bab ini berisi tentang proses pengaturan level pada tangki lateks dengan
pneumatik sistem, dan penggunaan aktuator sebagai alat aktuasi dalam
proses.
BAB V. Penutup
BAB II PNEUMATIK 2. 1. Dasar-dasar Pneumatik
2.1.1. Sifat-sifat fisika dari udara
Permukaan bumi ini ditutupi oleh udara. Udara adalah campuran gas yang
terdiri atas senyawa :
- sekitar 78 % dari volum adalah Nitrogen
- sekitar 21 % dari volum adalah Oksigen
sisanya adalah campuran karbon dioksida,argon, hydrogen neon, helium, krypton
dan xenon.
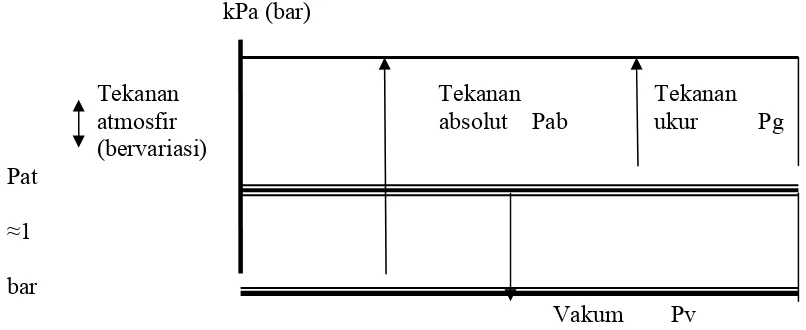
Karena segala sesuatu di bumi ini menerima tekanan yaitu tekanan absolut
atmosfir, maka tekanan ini tidak bisa dirasakan. Pada umumnya tekanan atmosfir
dianggap sebagai tekanan dasar, sedangkan yang bervariasi (akibat penyimpangan
nilai) adalah : Tekanan ukur = Pg
Tekanan Vakum = Pv
Variasi nilainya tergantung pada letak geografis dan iklimnya. Daerah dari
garis nol tekanan absolut sampai garis tekanan atmosfir disebut daerah vakum dan
diatas garis tekanan atmosfir adalah daerah tekanan ukur. Tekanan absolut ini
terdiri atas tekanan atmosfir (Pat) dan tekanan ukur (Pg). Tekanan absolut
biasanya 1 bar (100 kPa) lebih besar dari tekanan ukur.
2.1.2. Karakteristik Udara
Sebagaimana umumnya gas, udara juga tidak mempunyai bentuk yang
khusus sehingga sangat mudah berubah. Udara akan berubah bentuk sesuai
dengan tempatnya. Udara dapat dimampatkan dan selalu berusaha untuk
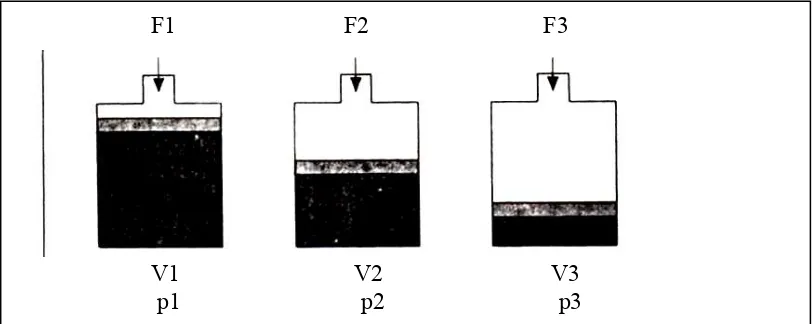
mengembang. Seperti terlihat pada gambar 2.2., Hukum Boyle Mariote
menjelaskan sifat : Volume dari massa gas yang tertutup pada temperatur konstan
adalah berbanding terbalik dengan tekanan absolut atau hasil kali dari volume dan
tekanan absolut adalah konstan untuk massa gas tertentu.
p1 * V1 = p2 * V2 = p3 * V3 = konstan
F1 F2 F3
V1 V2 V3 p1 p2 p3
2.2. Pengadaan Udara dan Distribusi
Supaya dapat menjamin keandalan pengendalian pneumatik, harus
disediakan udara yang kualitasnya memadai. Termasuk didalamnya adalah
faktor-faktor sebagai berikut : udara yang bersih, kering, dan tekanan yang tepat.
Jika ketentuan-ketentuan ini diabaikan, maka akibatnya adalah keandalan mesin
tidak terjamin dan dengan demikian akan menaikkan biaya perbaikan dan
penggantian komponen. Udara bertekanan diperoleh dari kompresor, kemudian
dialirkan melalui beberapa elemen sampai mencapai pemakai. Apabila tidak
menggunakan persiapan yang baik dalam penyalurannya dan pemilihan
komponen yang salah akan mengurangi kualitas udara tersebut. Elemen-elemen
berikut harus dipergunakan dalam penyiapan udara bertekanan :
- Kompresor udara
- Tangki udara
- Penyaring udara dengan pemisah air
- Pengering udara
- Pengatur tekanan
- Pelumas
- Tempat pembuangan untuk kondensasi
Jenis dan penempatan kompresor turut mempengaruhi kadar
partikel-partikel debu, minyak dan air masuk ke dalam sistem. Persiapan udara yang
kurang baik akan mengakibatkan sering menimbulkan gangguan dan menurunkan
daya tahan sistem pneumatik. Berikut adalah gejala-gejala yang tampak :
- Keausan yang cepat pada seal dan elemen yang bergerak dalam katup dan
- Katup akan beroli.
2.2.1. Tingkatan Tekanan
Umumnya, elemen-elemen pneumatik seperti silinder dan katup disiapkan
untuk menerima tekanan kerja maksimal 8 – 10 bar. Memang untuk
pengoperasian yang ekonomis, tekanan 6 bar sudah cukup. Tetapi karena adanya
tahanan arus pada masing-masing komponen dan dalam pipa-pipa saluran,
sambungan pipa, panjang pipa, kebocoran, maka harus diperhitungkan pula nilai
susut tekanan antara 0,1 sampai 0,5 bar. Oleh sebab itu, kompresor harus
menyediakan tekanan 6,5 sampai 7 bar supaya tekanan kerja sebesar 6 bar tetap
terjamin.
Jika tiba-tiba ada perubahan tekanan komsumsi, tangki udara bisa dipasang
untuk menstabilkan tekanan pada jaringan kerja udara bertekanan. Pada operasi
normal tangki udara ini diisi oleh kompresor, dengan alasan untuk cadangan yang
dapat digunakan setiap saat. Hal ini juga membuat kemungkinan untuk
mengurangi terjadinya hidup matinya kompresor.
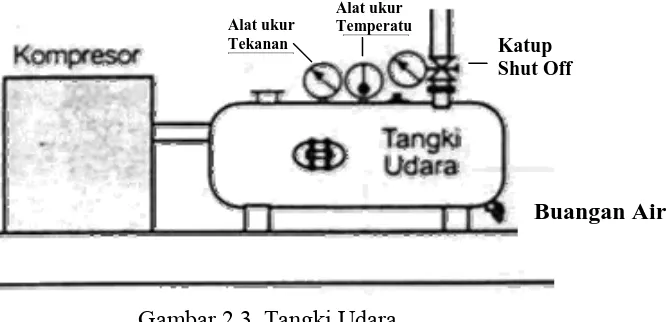
2.2.2. Tangki Udara
Tangki menghasilkan tekanan udara yang konstan di dalam sistem
pneumatik, tanpa memperhatikan pemakaian yang berubah-ubah. Fungsi lain dari
tangki adalah sebagai penyedia udara darurat ke sistem bila tiba-tiba terjadi
Alat ukur
Permukaan tangki yang luas akan mendinginkan udara, sehingga embun dalam
udara akan menjadi air. Oleh karena itu, penting pada tangki bagian bawah
dipasang kran untuk membuang air kondensasi.
Ukuran tangki udara bertekanan tergantung dari :
- Volume udara yang ditarik ke dalam tangki
- Pemakaian udara oleh pengguna
- Ukuran saluran
- Jenis dari pengaturan siklus kerja kompresor
- Penurunan tekanan yang diperkenankan dari jaringan saluran.
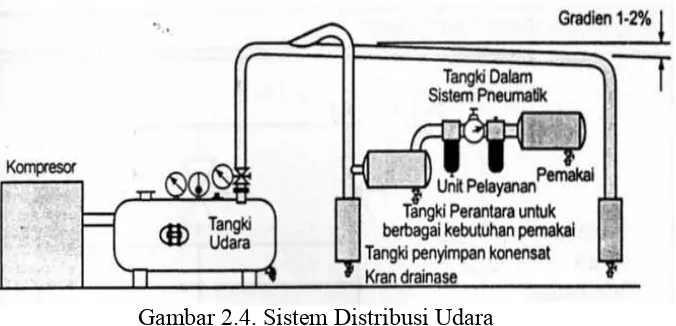
2.2.3. Distribusi Udara
Untuk menjamin distribusi udara yang handal dan lancar harus
diperhitungkan besarnya tekanan yang dibangkitkan oleh kompresor. Pengatur
tekanan terpusat dipasang untuk menjamin agar saringan udara bertekanan
menjadi stabil tekanannya. Sistem pendistribusian udara dapat dilihat pada
Gambar 2.4. Sistem Distribusi Udara
Tekanan konstan adalah syarat agar operasi kontrol pneumatik bebas dari
kesalahan. Untuk mendapatkan tekanan yang konstan, pengatur tekanan dipasang
sealiran dengan filter udara yang berfungsi untuk menjaga kestabilan tekanan
tanpa memperhatikan fluktuasi tekanan atau pemakaian udara dalam sistem.
Tekanan udara seharusnya disesuaikan dengan kebutuhan masing-masing
instalasi. Dalam pendistribusiannya terjadi penurunan tekanan dan pendinginan
luar yang dapat menghasilkan kondensat dalam pipa sistem. Supaya kondensat ini
dapat dibuang, saluran harus diletakkan pada kemiringan 1-2 %. Kemudian
kondensat dapat dibuang pada titik terendah melalui pembuang pipa.
2.3. Sensor Kedekatan (Proximity)
Sensor kedekatan adalah alat yang dapat mendeteksi adanya objek (target)
tanpa adanya kontak fisik. Sensor jenis ini adalah alat elektronis solid-state yang
terbungkus rapat untuk melindungi terhadap pengaruh getaran, cairan, kimiawi,
dan korosif yang berlebihan yang dijumpai pada lingkungan industri. Sensor
Objek yang sedang dideteksi terlalu kecil, terlalu ringan atau terlalu
lunak untuk dapat mengoperasikan sakelar mekanis.
Diperlukan respon yang cepat dan kecepatan penghubungan yang tinggi
seperti pada pemakaian perhitungan atau pengendali.
Sistem pengendali elektronis cepat menghendaki sinyal input
bounce-free.
Diperlukan ketahanan umur pelayanan dan keandalan pelayanan.
Sensor kedekatan ini terdiri dari dua jenis yaitu sensor kedekatan induktif dan
sensor kedekatan kapasitif. Masing-masing mempunyai cara pengaktifan yang
berbeda dalam pemakaiannya. Pada gambar 2.5 dapat dilihat sensor kedekatan
(proximity).
Gambar 2.5. Sensor Kedekatan (Proximity)
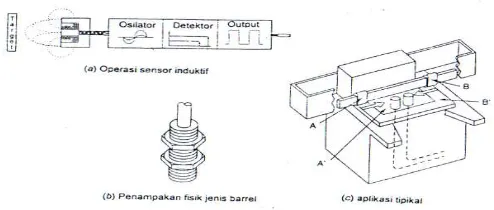
2.3.1. Sensor Kedekatan Induktif
Sensor kedekatan induktif adalah alat yang diaktifkan oleh objek logam.
Suatu pemakaian diperlihatkan pada gambar 2.6(c). Sensor kedekatan (A’ dan B’)
mendeteksi target A dan B yang bergerak pada arah yang diperlihatkan oleh anak
panah. Ketika A mencapai A’ mesin berbalik arah putarnya; mesin berbalik lagi
ketika B mencapai B’. Pada prinsipnya sensor induktif terdiri dari kumparan,
Gambar 2.6. Sensor Kedekatan Induktif
Ketika energi diberikan, osilator bekerja membangkitkan medan frekuensi
tinggi, dimana osilator merupakan suatu rangkaian elektronis untuk
membangkitkan bentuk gelombang ac dan frekuensi dari sumber energi dc. Pada
saat itu harus tidak ada bahan konduktif apapun pada medan frekuensi. Apabila
objek medan masuk pada medan frekuensi tinggi arus eddy akan terinduksi pada
permukaan target. Hal ini akan mengakibatkan kerugian energi pada rangkaian
osilator sehingga menyebabkan lebih kecilnya amplitudo osilasi. Rangkaian
detektor merasakan perubahan beban spesifik pada amplitudo dan membangkitkan
sinyal yang akan menghidupkan atau mematikan output elektronik. Apabila objek
logam meninggalkan wilayah sensor, osilator membangkitkan lagi, membuat
sensor kembali lagi ke status normalnya.
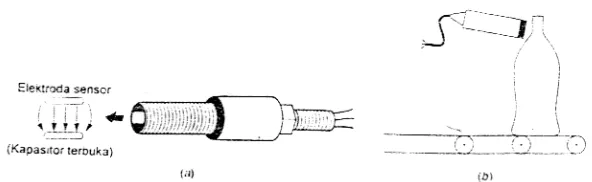
2.3.2. Sensor Kedekatan Kapasitif
Sensor kedekatan kapasitif adalah alat yang dapat diaktifkan oleh bahan
konduktif dan non-konduktif. Kerja sensor kapasitif juga didasarkan pada prinsip
dibentuk oleh dua elektroda logam agak mirip dengan kapasitor terbuka, seperti
gambar 2.7.
Gambar 2.7. Sensor Kedekatan Kapasitif
Elektroda-elektroda akan membentuk medan elektrostatis pada saat target
mencapai sisi sensor, ini menyebabkan rangkaian akan mulai berosilasi.
Amplitudo osilasi diukur dengan rangkaian pengevaluasian yang membangkitkan
sinyal untuk menghidupkan atau mematikan output elektronik.
Seperti pada gambar 2.7(b), cairan yang mengisi tabung gelas atau plastik
dapat dimonitor dari luar tabung dengan sensor kedekatan kapasitif. Dalam
beberapa pemakaian, tabung kosong dideteksi dengan sensor kedua yang mulai
mengalirkan cairan. Aliran akan tertutup apabila level mencapai bagian atas
sensor.
Untuk mengaktifkan sensor induktif diperlukan bahan konduktif. Sensor
kapasitif dapat diaktifkan dengan bahan konduktif dan non-konduktif misal kayu,
plastik, ataupun cairan. Dengan keuntungan sensor kapasitif ini (dibandingkan
dengan sensor induktif) muncul beberapa kelemahan. Misalnya, saklar kedekatan
induktif dapat diaktifkan hanya dengan logam dan tidak peka dengan kelembaban,
debu, kotoran dan yang sejenisnya. Saklar kedekatan kapasitif dapat diaktifkan
2.4. Katup Kontrol
Dalam dunia industri pada saat ini khususnya dalam bidang pengontrolan,
tidak terlepas dari peran dari sebuah katup. Katup dapat dibagi dalam beberapa
jenis berdasarkan fungsinya yang berkaitan dengan jenis sinyal, cara aktifnya, dan
konstruksinya. Fungsi utama dari katup adalah untuk merubah, membangkitkan
atau membatalkan sinyal untuk tujuan penyensoran, pemrosesan, dan
pengontrolan. Sebagai tambahan, katup dipakai juga sebagai katup daya untuk
menyuplai udara bertekanan ke aktuator.
2.4.1. Katup Kontrol Arah
Katup kontrol arah mengontrol sinyal udara yang lewat dengan cara
membangkitkan, mengubah, atau mengalihkan sinyal. Dalam bidang teknologi
kontrol ukuran dan konstruksi katup tidak kalah penting dibandingkan dengan
pembangkitan sinyal dan cara aktifnya. Konstruksi dari katup kontrol arah ada dua
macam yaitu jenis poppet dan jenis geser. Jenis poppet untuk laju aliran yang
rendah dan biasanya digunakan sebagai sinyal masukan dan sinyal pengolah.
Sedangkan jenis katup geser mampu memberikan aliran yang lebih besar,
sehingga memungkinkan katup ini berfungsi sebagai pengontrol daya dan
aktuator.
2.4.2. Katup Kontrol Aliran
Katup kontrol aliran menghambat atau mencekik udara dalam arah tertentu
udara akan hampir sama jumlahnya dengan jika katup tidak dipasang. Dalam
beberapa hal dimungkinkan untuk mendapatkan variasi bukaan dari katup. Mulai
dari terbuka penuh sampai tertutup penuh. Jika katup kontrol aliran digabungkan
dengan katup satu arah sehingga fungsi kontrol aliran bekerja satu arah dan arah
yang berlawanan akan mengalirkan udara secara penuh tanpa melalui cekikan.
Apabila katup satu arah tidak dipasang, maka pembatas akan membatasi aliran
udara pada kedua arahnya. Katup kontrol aliran dipasang sedekat mungkin dengan
elemen kerja jika dimungkinkan dan harus bisa diatur untuk memenuhi kebutuhan
dan aplikasinya.
2.4.3. Katup Kontrol Tekanan
Katup kontrol tekanan banyak dipakai dalam sistem kontrol pneumatik.
Katup kontrol tekanan ini dapat dibagi dalam beberapa jenis, yaitu :
- Katup pengatur tekanan
- Katup pembatas tekanan
- Katup sekuens tekanan
Katup pengatur tekanan adalah mengatur tekanan kerja dalam rangkaian kontrol
dan menjaga tekanan agar tetap konstan dengan mengabaikan faktor turun
naiknya tekanan di dalam sistem.
Katup pembatas tekanan, banyak dipakai pada sisi aliran keluaran dari kompresor
guna menjamin agar tangki terbatas tekanannya, sebagai faktor keamanan dan
menjamin tekanan yang disuplai ke sistem sudah diatur pada tekanan yang benar.
Katup sekuens tekanan dipakai untuk menyensor tekanan saluran luar dan
harga tekanan terpenuhi, maka katup akan memberikan sinyal. Pengaturan harga
tekanan yang diminta dengan cara mengatur pegas yang melawan tekanan masuk.
2.4.4. Katup kombinasi
Bermacam elemen yang fungsinya dikombinasikan, akan didapatkan sebuah
fungsi yang baru. Komponen yang baru bisa dibangun dengan mengkombinasikan
tiap elemen atau diproduksi sebagai satu elemen yang kompak untuk mengurangi
kerumitan dan ukuran. Salah satu contoh adalah katup tunda waktu yang
mengkombinasikan katup pengontrol aliran satu arah, sebuah tabung, dan sebuah
katup kontrol arah 3/2.
2.5. Aktuator dan Alat Keluaran
Aktuator adalah bagian keluaran untuk mengubah energi suplai menjadi
energi kerja yang dimanfaatkan. Sinyal keluaran dikontrol oleh sistem kontrol dan
aktuator bertanggung jawab pada sinyal kontrol melalui elemen kontrol terakhir.
Jenis lain dari bagian keluaran digunakan untuk mengindikasi status kontrol
sistem atau aktuator.
Aktuator pneumatik bisa diuraikan pada dua kelompok gerak lurus dan
putar:
1.Gerakan lurus (gerakan linier)
- silinder kerja-tunggal
2. Gerakan putar
- aktuator yang berputar
Silinder Kerja- tunggal
Dengan memberikan udara bertekanan pada sisi permukaan piston, sisi yang
lain terbuka ke atmosfir. Silinder hanya bisa memberikan gaya kerja pada satu
arah. Gerakan piston kembali masuk diberikan oleh gaya pegas yang ada di dalam
silinder atau memberikan gaya dari luar. Gaya pegas yang ada dalam silinder
direncanakan hanya untuk mengembalikan silinder pada posisi mulai dengan
alasan agar kecepatan kembali tinggi pada kondisi tanpa beban. Pada silinder
kerja tunggal dengan pegas, langkah silinder dibatasi oleh panjangnya pegas. Oleh
karena itu silinder kerja tunggal dibuat maksimum langkahnya sampai sekitar 80
mm. Menurut konstruksinya silinder kerja-tunggal dapat melaksankan berbagai
fungsi gerakan, seperti : menjepit benda kerja, pemotongan, pengeluaran,
pengepresan, pemberian dan pengangkat.
Silinder Kerja-ganda
Prinsip konstruksi silinder ganda adalah sama dengan silinder
kerja-tunggal, tetapi tidak memiliki pegas pengembali, dan dua lubang saluran dipakai
sebagai saluran masukan dan saluran pembuangan. Silinder kerja ganda
mempunyai keuntungan yaitu bisa dibebani pada kedua arah gerakan batang
pistonnya. Ini memungkinkan pemasangannya lebih fleksibel. Gaya yang
diberikan pada batang piston adalah lebih besar untuk gerakan keluar daripada
gerakan masuk. Karena efektif permukaan piston dikurangi pada sisi batang piston
dibatasi, walaupun faktor lengkungan dan bengkokan yang diterima batang piston
harus diperbolehkan.
Jika silinder harus menggerakkan massa yang besar, maka dipasang peredam
diakhir langkah untuk mencegah benturan keras dan kerusakan silinder. Sebelum
mencapai posisi akhir langkah, peredam piston memotong langsung jalan arus
pembuangan udara ke udara bebas. Untuk itu disisakan sedikit sekali penampang
pembuangan yang umumnya dapat diatur. Sepanjang bagian terakhir dari jalan
langkah, kecepatan masuk dikurangi secara drastis. Pada gaya yang sangat besar
dan percepatan yang tinggi, harus dilakukan upaya pengamanan khusus.
Aktuator rotari
Aktuator rotari sering digunakan atau sangat sesuai pada robot dan
pemegang material dimana ada kendala dari tempat atau ruangan.
Gambaran rancangan aktuator pneumatik berputar :
- Kecil dan kokoh
- Tersedia dengan sensor tanpa sentuh
- Pemindahan yang dapat diatur
- Dibuat dari logam ringan
- Cara pemasangannya mudah.
2.6. Sistem Kontrol
Sistem kontrol adalah proses pengaturan/pengendalian terhadap satu atau
beberapa besaran (variable, parameter) sehingga berada pada suatu nilai atau
peralatan, sistem kontrol terdiri dari berbagai susunan komponen fisis yang
digunakan untuk mengarahkan aliran energi ke suatu mesin atau proses agar dapat
memperoleh hasil yang diinginkan.
Tujuan utama dari suatu sistem pengontrolan adalah untuk mendapatkan
optimisasi dimana hal ini dapat diperoleh berdasarkan fungsi daripada sistem
kontrol itu sendiri, yaitu: pengukuran, membandingkan, pencatatan dan
perhitungan, dan perbaikan.
Secara umum sistem kontrol dapat dikelompokkan sebagai berikut :
- Dengan operator (manual) dan otomatik
- Rangkaian tertutup (closed-loop) dan rangkaian terbuka (open-loop)
2.6.1. Proses Kontrol
Proses adalah sebuah kegiatan berkesinambungan yang mengubah suatu
material. Istilah proses di industri mencakup input (raw material/feed/bahan baku)
dan output (product). Kontrol untuk menjaga kondisi (operasi kilang) sesuai yang
diinginkan dalam sistem dengan mengatur variabel yang dipilih dalam sistem
tersebut
Proses Kontrol: menjaga kondisi yang diinginkan dalam sistem dengan
mengatur variabel yang dipilih dalam sistem untuk mengurangi gangguan
(disturbance) yang mempengaruhi sistem.
Beberapa jenis variabel yang selalu digunakan dalam suatu loop kontrol,
yang dapat dijelaskan sebagai berikut:
C ontrolled variable: yaitu variabel proses yang akan dikontrol, seperti
dsbnya. Idealnya “controlled variable” ini harus diukur
untuk kemudian dibandingkan dengan “set point” nya.
Akan tetapi apabila tidak memungkinkan untuk
dilakukan pengukuran langsung, maka nilai variabel ini
bisa diperoleh melalui suatu perhitungan (inferensial).
Manipulated variable: variabel yang akan dimanipulasi oleh final control
element dalam rangka melakukan aksi koreksi (atau
mempertahankan) harga “Controlled variable” yang
ada.
Load variable : variabel yang merupakan beban dari suatu loop kontrol,
sebagai contoh flow/pressure steam dalam suatu alat
(steam drum level control), atau temperature outlet
dalam suatu heater.
Disturbanced variable: merupakan variabel gangguan bisa terhadap load
maupun terhadap manipulated variable. Pada stuktur
kontrol tertentu nilai variabel ini harus diketahui baik
melalui pengukuran langsung maupun tak langsung
melalui hasil perhitungan. Stuktur control yang
membutuhkan harga variabel ini adalah “cascade
control” atau “feedforward control”. Contoh untuk
variabel ini adalah pressure fuel gas dalam suatu
heater, dalam hal ini gangguan terhadap “manipulated
Measured variable: yaitu variabel proses yang diukur dalam rangka
mengetahui nilai “controlled variable” atau
“disturbanced variable” jadi “measured variable” ini
bisa merupakan kedua variabel tersebut ataupun
variabel lainnya yang akan digunakan untuk
menghitung harga/nilai dari kedua variabel tersebut.
Sebagai contoh pengukuran temperature outlet dalam
suatu heater, atau pengukuran temperatur (inlet dan
outlet heat exchanger) dan flow dalam suatu sistem
kontrol duty.
Set point : nilai yang diinginkan dari suatu “controlled variable”
Error : perbedaan antara harga aktual “controlled variable”
dan “set point”-nya.
Dari contoh diatas dapat disimpulkan element-element loop proses kontrol:
Sensor, pembaca variabel proses
Controller, menggerakkan actuator dengan memberikan sinyal output controller
yang sesuai
Actuator, mengatur manipulated variable berdasar dari nilai output sinyal
controller
Proses, sistem yang dikontrol
Nilai/ harga parameter kontrol menentukan keberhasilan dari suatu sistem kontrol
yang dirancang. Penentuan nilai parameter ini dilakuakan dengan coba-coba atau
kontrol. Contoh parameter kontrol adalah proposal gain, reset time dalam suatu
kontrol PID.
Untuk proses yang tidak bergantung waktu (time invariant process) maka harga
parameter proses dianggap tetap. Teknik kontrol yang banyak dikembangkan
kebanyakan untuk proses jenis ini. Untuk perubahan parameter proses yang kecil
dan lamban maka metode seperti adaptive control atau robust control bisa
digunakan. Akan tetapi perubahan tersebut berlangsung secara cepat dan dengan
nilai yang cukup besar (time invariant process) maka metoda-metoda tersebut
tidak mampu lagi untuk digunakan.
2.6.2. Manual dan Otomatik
Pengontrolan secara manual adalah pengontrolan yang dilakukan oleh
manusia yang bertindak sebagai operator; sedang pengontrolan secara otomatis
adalah pengontrolan yang dilakukan oleh mesin-mesin/peralatan yang bekerja
secara otomatis dan operasinya di bawah pengawasan manusia.
Pengontrolan secara manual banyak ditemukan dalam kehidupan sehari-hari
seperti pada penyetelan suara radio, televisi, pengaturan aliran air melalui keran,
pengaturan kecepatan kendaraan, dan lain-lain, sedangkan pengontrolan secara
otomatis kebanyakan dipisahkan oleh unit-unit sebagai elemen pengukur dan
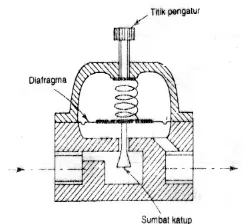
aktuator. Kontroler beroperasi menggunakan daya dari elemen pengukur dan
sangat sederhana serta murah. Suatu contoh kontroler beroperasi otomatis
Gambar 2.8. Kontroler Beroperasi Otomatis
Operasi dari kontrol beroperasi otomatis adalah sebagai berikut : Anggap
tegangan keluaran lebih rendah dari tegangan acuan, seperti ditentukan oleh titik
set. Selanjutnya gaya pegas ke bawah lebih rendah dari gaya tekan ke
atas,menyebabkan gerak ke bawah pada diafragma. Hal ini meningkatkan laju
aliran dan tekanan keluaran. Apabila gaya tekan ke atas sama dengan gaya pegas
ke bawah maka katup tetap dan laju aliran tetap. Sebaliknya apabila tekanan
keluaran lebih besar dari tekanan acuan, katup membuka dan menurunkan laju
aliran yang melalui katup pembuka. Suatu kontroler beroperasi sendiri lebih
banyak digunakan untuk kontrol tekanan air maupun gas.
2.6.3. Rangkaian Terbuka dan Rangkaian Tertutup
Sistem kontrol rangkaian terbuka merupakan suatu sistem yang keluarannya
tidak mempunyai pengaruh terhadap aksi kontrol. Dengan kata lain, sistem
kontrol rangkaian terbuka keluarannya tidak dapat digunakan sebagai
perbandingan umpan balik dengan masukan. Sebagai contoh sederhana adalah
mesin cuci. Perendaman, pencucian, dan pembilasan dalam mesin cuci dilakukan
atas basis waktu. Mesin ini tidak mengukur sinyal keluaran yaitu tingkat
kebersihan kain. Setiap gangguan yang terjadi akan menimbulkan pengaruh yang
24
INPUT OUTPUT
SISTEM PENGONTROL
Gambar 2.9. Diagram blok sistem kontrol rangkaian terbuka
Sistem kontrol rangkaian tertutup (closed-loop control sistem) merupakan
sistem pengendalian dimana besaran keluaran memberikan efek terhadap besaran
masukan sehingga besaran yang dikendalikan dapat dibandingkan terhadap harga
yang diinginkan melalui alat pencatat (indicator atau rekorder). Perbedaan yang
terjadi antara besaran yang dikendalikan dan penunjukan pada alat pencatat
digunakan sebagai koreksi, seperti yang terlihat pada gambar 2.10
INPUT + OUTPUT - PROSES
UMPAN BALIK
Gambar 2.10. Diagram blok sistem kontrol rangkaian tertutup
Dari segi kestabilan, sistem kontrol loop terbuka lebih mudah dibuat karena
kestabilan bukan merupakan persoalan utama. Sebaliknya, kestabilan selalu
merupakan persoalan utama pada sistem kontrol loop tertutup karena cenderung
terjadi kesalahan akibat koreksi berlebih yang dapat menimbulkan osilasi pada
BAB III
PENGGUNAAN SISTEM PNEUMATIK
3.1. Sistem Pneumatik
Sistem pneumatik pada saat ini sudah banyak digunakan dalam otomasi
mesin-mesin produksi dan dalam bidang kontroler otomatis. Misalnya, rangkaian
pneumatika yang mengubah energi udara menjadi energi mekanika digunakan
secara luas, dan berbagai jenis kontroler pneumatika ditemukan dalam industri.
Alasan pemakaian yang luas ini dikarenakan sifat kesederhanaan, dan perawatan
yang mudah.
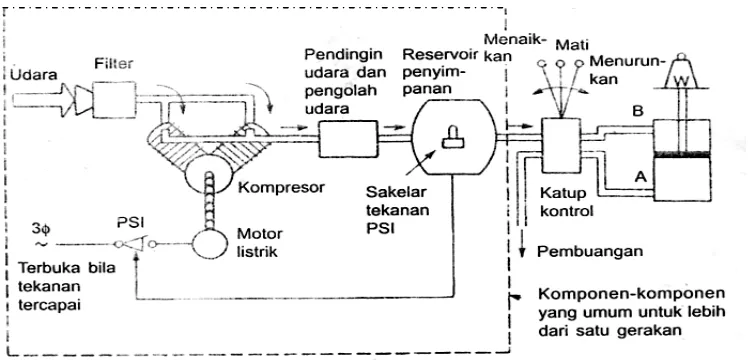
Gambar 3.1 menunjukkan komponen-komponen suatu sistem pneumatik.
Dapat dilihat bahwa udara dihisap dari atmosfir lewat filter udara dan dinaikkan
ke tekanan yang dibutuhkan oleh sebuah kompresor udara (biasanya digerakkan
oleh sebuah motor AC). Sebagaimana yang sudah diketahui, bahwa udara juga
mengandung uap air dalam jumlah besar, maka sebelum dapat digunakan, udara
harus didinginkan untuk menyebabkan kondensasi. Jadi, kompresor udara harus
disertai oleh sebuah unit pendingin dan pengolah udara.
Kompresibilitas suatu gas atau udara membuat kita perlu menyimpan gas
bertekanan dalam reservoir, untuk ditarik oleh beban. Tanpa menggunakan
reservoir ini, dapat mengakibatkan ketidakstabilan tekanan dalam sebuah gerakan
silinder . Oleh sebab itu, sebuah unit pengolah udara mesti disertai dengan
reservoir udara. Suatu sakelar tekanan yang dipasang pada reservoir udara,
digunakan untuk menghidupkan motor kompresor bila tekanan turun dan
mematikannya kembali bila tekanan mencapai level yang dibutuhkan.
Beberapa proses industri dan kontroler pneumatik melibatkan aliran gas atau
udara melalui jalur pipa penghubung dan tangki-tangki tekanan. Dapat dilihat
sistem tekanan yang ditunjukkan pada gambar 3.2(a). Aliran gas melalui
penghalang adalah merupakan fungsi dari beda tekanan gas (pi – po). Sistem
tekanan semacam itu dapat dicirikan dalam bentuk tahanan dan kapasitansi.
Tahanan aliran gas R dapat diartikan sebagai berikut :
perubahan kecil dari aliran gas. Perhitungan harga tahanan aliran gas R mungkin
memerlukan waktu yang cukup lama. Meskipun demikian, dapat ditentukan
dengan mudah dari kurva beda tekanan terhadap aliran dengan menghitung
Kapasitansi bejana tekanan dapat didefenisikan sebagai
Perubahan dari persediaan gas, lb Perubahan tekanan gas, lbf / ft2
C =
Atau
C =
dengan C = kapasitansi, lb-ft2/lbf
dm d
Gambar 3.2 Sistem Tekanan
3.2. Proses Kontrol Pneumatik
Jika beberapa proses industri harus dikontrol secara otomatis, maka akan
banyak variabel proses (misalnya temperatur, aliran, tekanan, level) yang perlu
diukur dan dijaga pada nilai yang benar demi keamanan dan ekonomisnya operasi.
Dalam gambar 3.3, misalnya, aliran air dalam sebuah pipa harus dijaga pada suatu
nilai tetapan awal (preset Value).
Dalam gambar 3.3, aliran diukur untuk memberikan besar aliran saat itu
(biasanya dinamakan PV – singkatan dari process Variable (varibel proses).
set point) untuk menghasilkan sinyal error, yang dilewatkan ke sebuah pengontrol.
Sinyal ini mengatur sinyal penggerak aktuator untuk menggerakkan katup dalam
arah yang memberikan aliran yang dibutuhkan (dengan kata lain, PV = SP, yang
menghasilkan error nol). Susunan pada gambar 3.3 dinamakan kontrol loop
tertutup (closed loop control), karena sebuah loop dibentuk oleh pengontrol,
aktuator, dan peralatan pengukur.
Gambar 3.3. Kontrol Loop Tertutup
Banyak cara kerja kontrol proses yang didasarkan pada peralatan pneumatik,
dengan berbagai sinyalnya yang ditunjukkan oleh tekanan pneumatik. Dapat
dilihat kebanyakan proses kontrol dilakukan dalam pabrik kimia atau petrokimia,
di mana lingkungan bahan mudah meledak adalah biasa. Bila digunakan sinyal
elektrik, maka harus diberikan pengawasan yang besar untuk menjamin tidak
terjadinya kekeliruan yang dapat menyebabkan bunga api, yang dapat menyalakan
suatu ledakan. Walaupun tindakan pencegahan dapat dilakukan, hasilnya menjadi
rumit dan perawatan mungkin akan menjadi sulit.
Sebuah sistem pneumatik hanya mengandung udara, sehingga sistem
pneumatik tidak menghadirkan bahaya pada kondisi seperti ini. Sebagian besar
tetap popular. Banyak peralatan dalam loop, dalam kasus apapun dilengkapi
paling baik oleh teknik pneumatik. Walaupun aktuator elektrik tersedia,
kebanyakan katup digerakkan oleh sinyal pneumatik-bahkan bila tranduser dan
pengontrolnya adalah elektronik.
Kontrol loop tertutup, membutuhkan sebuah pengontrol yang mengambil
sinyal yang diharapkan (set point) dan sinyal sebenarnya (variabel proses),
menghitung error, kemudian mengatur keluaran dengan suatu actuator untuk
membuat nilai aktualnya sama dengan nilai yang diharapkan.
Pengontrol pneumatik yang paling sederhana dinamakan pengontrol
proporsional saja, yang ditunjukkan secara skematik pada gambar 3.4. Sinyal
keluaran di sini hanyalah sinyal error yang dikalikan dengan suatu gain:
OP = K × error
= K × (SP – PV)
dengan K adalah gain.
Gambar 3.4. Pengontrol Proporsional saja
Keluaran pengontrol proporsional adalah K×error, sehingga untuk
mendapatkan sinyal keluaran, sebuah sinyal error harus ada. Error ini yang
dinamakan offset, biasanya kecil, dan dapat dikurangi dengan gain yang besar.
menjadi tak stabil. Dalam keadaan ini dilakukan modifikasi pada pengontrol
dasar. Suatu integral waktu dari error ditambahkan dan menghasilkan:
OP = K error 1/Ti ∫ errordt ………(3.1)
Pengontrol yang mengikuti persaman 3.1 dinamakan pengontrol proporsional
integral (P + I), yang diilustrasikan pada gambar 3.5. konstanta Ti, yang
dinamakan waktu integral, diatur oleh pemakai. Sebuah pengontrol yang
memenuhi persamaan 3.1 mempunyai diagram balok yang ditunjukkan pada
gambar 3.5a. Selama ada error, keluaran pengontrol merangkak naik atau turun ke
suatu laju yang ditentukan oleh Ti. Hanya bila tak terjadi error-lah maka
pengontrol keluaran konstan. Pengikutsertaan suku integral dalam persamaan 3.1
menggantikan error offset.
Sebuah pengontrol pneumatik P + I dapat dikonstruksi seperti yang
ditunjukkan pada gambar 3.5b. Bellow integral melawan aksi dari bellow umpan
balik, dengan laju perubahan tekanan dibatasi oleh katup pengatur Ti. Pengontrol
menyeimbangkan dengan tepat celah nosel flapper untuk menghasilkan error nol,
dengan PV = SP dan menyamakan gaya-gaya dari bellow integral dan bellow
c. Konstruksi
Gambar 3.5 Pengontrol Proporsional Puls Integral (P + I)
3.3. Mekanisme Kerja sebuah Aktuator
Aktuator linier beroperasi pada tekanan konstan, memproduksi suatu gaya
yang proporsional dengan tekanan yang diberikan dan biasanya mengembang
penuh atau menyusut penuh. Actuator katup beroperasi dengan sebuah tekanan
terapan yang dapat berkisar dari 0,2 sampai 1 bar, yang menghasilkan suatu
perpindahan poros yang sebanding dengan tekanan terapan.
Suatu aktuator ditunjukkan pada gambar 3.6a Sinyal kontrol diterapkan pada
bagian atas piston yang dibuat kedap oleh suatu diafragma fleksibel. Gaya ke
bawah dari tekanan ini (P × A) dilawan oleh gaya kompresi pegas, dan piston
berhenti ketika kedua gaya adalah sama, dengan perpindahan yang proporsional
kekakuan pegas, dan tekanan pada aktuator mulai bergerak (± 0,2 bar) diatur oleh
penyesuaian pra-tegangan.
Gambar 3.6b mengilustrasikan kerja diafragma karet. Diafragma ini
mengupas’ ke atas dan ke bawah dinding silinder sehingga luas piston tetap
konstan dalam seluruh jangkauan perjalanan. Poros aktuator mengembang karena
tekanan yang bertambah, gagal (fail) mencapai posisi naik penuh dikarenakan
cacat-cacat yang biasa seperti menyangkut rugi pasokan udara, rugi sinyal atau
retaknya seal diafragma. Karena alasan ini aktuator semacam itu dikenal sebagai
jenis fail-up.
(a) kontruksi
Gambar 3.6 Aktuator Fail-up
Sebaliknya, pada aktuator yang ditunjukkan pada gambar 3.7, tekanan sinyal
di berikan di bagian bawah piston dan gaya pegas dibalik. Dengan desain ini
poros bergerak ke atas untuk menaikkan tekanan dan bergerak ke bawah karena
model kegagalan yang umum. Aktuator ini dikenal sebagai aktuator fail-down
atau aktuator bekerja terbalik. Salah satu kelemahan desain ini adalah
Gambar 3.7 Aktuator fail-down
Aktuator katup cenderung mempunyai luas permukaan yang besar untuk
memberikan gaya yang dibutuhkan, yang berarti volume udara yang cukup
banyak ada di atas piston. Gerakan katup menyebabkan perubahan volume ini,
dan membutuhkan udara untuk dipasok dari, atau dihembuskan oleh, peralatan
yang menyediakan sinyal tekanan. Suatu ketidakcocokan antara kebutuhan udara
aktuator dan kapabilitas peralatan yang memasok sinyal tekanan, akan
menghasilkansuatu respons ketertinggalan orde pertama yang lambat.
Gaya neto yang bekerja pada piston pada gambar 3.6 dan 3.7 adalah jumlah
gaya dari tekanan terapan, gaya pegas yang berlawanan dan tiap gaya dinamik
yang diinduksikan ke dalam batang katup dari fluida yang akan dikontrol. Dengan
demikian gaya-gaya dinamika ini menghasilkan suatu error offset pada posisi
katup. Efek ini dapat direduksi dengan menaikkan luas piston atau jangkauan
tekanan operasi, tetapi ada batas-batas ukuran aktuator dan kekuatan seal
diafragma.
Sebuah pengatur posisi katup digunakan untuk memperbaiki cara kerja dari
posisi sekeliling aktuator seperti yang ditunjukkan pada gambar 3.8. Pengatur
posisi katup terutama digunakan:
Untuk meningkatkan kecepatan operasi katup
Untuk menghilangkan offset yang diakibatkan gaya-gaya dinamik dalam katup
Ketika dibutuhkan suatu pemampatan tekanan untuk memberi gaya aktuator
yang diperlukan
Ketika suatu aktuator kerja ganda dibutuhkan (yang tidak dapat dikontrol
dengan jalur tekanan tunggal)
Gambar 3.8 Pengatur posisi Katup
3.4. Prinsip Umum Operasi
Pengoperasian dengan proses pneumatik juga berhubungan dengan
pengurutan (sequencing), yaitu melaksanakan kerja yang mengikuti satu dengan
yang lain dalam urutan yang sederhana atau dengan urutan yang ditentukan oleh
sensor. Suatu contoh sederhana sistem pengurutan pneumatik diilustrasikan pada
gambar 3.9, di mana sebuah piston berosilasi secara kontinu antara dua saklar
batas yang dioperasikan dengan pilihan LS1 dan LS2. Ini menggeser katup V1
dengan jaringan tekanan pilot. Spul katup utama tidak mempunyai pegas balik dan
tetap dalam posisinya, sampai ada sinyal yang berlawanan. Katup bolak-balik V2
Gambar 3.9 Sebuah contoh pengurutan; silinder berosilasi antara LS1 dan LS2
Waktu seringkali digunakan untuk mengontrol urutan (misalnya, mengisi
sebuah komponen, tunggu lima sekon, isi komponen berikutnya). Sebuah katup
tunda waktu dikontruksikan seperti yang diilustrasikan pada gambar 3.10a. Sinyal
masukan X adalah sinyal pilot yang menggerakkan spul dalam katup utama V1,
tetapi sinyal itu ditunda oleh katup restriksi dan volume reservoir yang kecil V.
Bila X digunakan, tekanan Y naik secara eksponensial sehingga memberikan
suatu penundaan T, sebelum tekanan yang dioperasikan pilot dicapai. Bila X
dipindahkan, maka katup tak balik secara cepat mengosongkan reservoir yang
menghasilkan penundaan off yang dapat diabaikan. Gambar 3.10b menunjukkan
respons itu.
(a)diagram sirkuit (b) Respons
36
Katup-katup pengurutan digunakan untuk mengikat operasi yang dikontrol
tekanan menjadi satu. Katup-katup ini kerjanya agak menyerupai sebuah katup
yang dioperasikan pilot, tetapi disini desainer dapat mengontrol tekanan ketika
katup beroperasi. Sebuah aplikasi tipikalnya ditunjukkan pada gambar 3.11, di
mana sebuah silinder dibutuhkan untuk memberikan gaya tertentu pada sebuah
benda. Katup V2 adalah katup pengurut dan beroperasi pada sebuah tekanan yang
diatur oleh pegas. Urutan dimulai oleh tombol tekan PB1, yang menggeser spul
pilot di katup utama V1 dan menyebabkan silinder mengembang. Bila silinder
mencapai pengembangan penuh, maka saklar batas LS1 beroperasi dan tekanan P1
mulai naik. Bila tekanan yang diatur awal dicapai maka katup pengurut V2
beroperasi, sehingga menggerakkan spul di katup utama V1 dan menyusutkan
silinder.
BAB IV ANALISA SISTEM 4.1. Elemen Pneumatik
Dalam proses pengaturan level pada tanki lateks digunakan dengan sistem
pneumatik. Sistem pneumatik terdiri dari beberapa tingkatan yang mencerminkan
perangkat keras dan aliran sinyal. Berbagai tingkatan yang membentuk lintasan
kontrol untuk aliran sinyal, mulai dari aliran sinyal masukan menuju sinyal
keluaran dapat dilihat pada gambar 4.1.
PASOKAN ENERGI Sumber
ELEMEN MASUKAN Sinyal masukan
ELEMEN PEMROSES Sinyal prosesor
ALAT AKTUASI Keluaran Elemen kontrol akhir
Gambar 4.1 Proses Kerja Sistem
Tingkatan utama dari sistem pneumatik adalah :
Catu daya (energi supply) Elemen masukan (sensor)
Elemen kerja (actuator)
Elemen-elemen dalam sistem pneumatik diwakili oleh simbol-simbol yang
menunjukkan fungsi dari elemen tersebut. Simbol tersebut dapat berupa gabungan
beberapa simbol elemen dan berkerja sesuai fungsi tertentu. Rangkaian dari setiap
elemen digambar dengan urutan yang sama dengan diagram aliran sinyal diatas.
Pada tingkatan aktuator ditambahkan kontrol elemen untuk melengkapi
struktur. Kontrol elemen mengontrol aksi aksi dari aktuator setelah menerima
sinyal yang dikirim oleh elemen pengolah (prosesor).
Elemen yang digunakan dalam sistem pneumatik ini dapat dilihat pada gambar
4.2. katup kontrol arah (KKA) dapat sebagai sensor, pengolah atau pengontrol
aktuator. Jika katup kontrol arah digunakan sebagai pengontrol gerakan silinder
maka akan masuk pada grup aktuator bagian elemen kontrol. Jika sebagai elemen
Perbedaan fungsi biasanya berdasarkan cara pengoperasiannya dan
bergantung pada letak katup kontrol arah di dalam gambar rangkaian.
Pada gambar 4.3 dapat dilihat rangkaian dan tata letak urutan kontrol dari
sebuah elemen pneumatik.
x Y
Gambar 4.3 Diagram rangkaian dari elemen-elemen pneumatik
Batang piston silinder harus keluar apabila setelah menerima sinyal dari
sebuah sensor, seperti yang terlihat pada gambar 4.3. Lubang masuk (X dan Y)
katup 1.6 dihubungkan dengan lubang keluar keluar tombol katup 1.2 dan 1.4.
dengan mengaktifkan salah satu dan kedua tombol akan memberikan sinyal pada
lubang masuk atau Y ( logic OR terpenuhi ). Sinyal ini diteruskan oleh katup 1.6
untuk mengatifkan katup control 1.1. akibatnya udara bertekanan akan mengalir
dari sumber tekanan melalui katup control 1.1 ke silinder dan batang piston
silinder keluar. Katup control 1.1 dapat berupa katup 4/2 atau 5/2 dengan ukuran
yang sesuai dengan kebutuhan udara silinder. Bila sinyal yang dihasilkan dari
penekanan tombol katup 1.2 dan 1.4 dilepas, maka katup 1.6 akan memutus sinyal
lubang 14 (Z) katup control 1.1. udara bertekanan dari sinyal 14 (Z) akan
posisi katup control 5/2 ke posisi awal. Keluaran 2 (B) aktif dan keluaran 4 (A)
membuang udara ke atmosfir maka silinder kembali ke posisi awal.
4.2. Proses Pengaturan Level Pada Tank Lateks
Proses pencetakan/ pembuatan sarung tangan dilakukan pada areal glove
plant dengan menggunakan dipping machine yang berupa rangkaian former yang
dipasang pada rantai yang digerakkan oleh main drive gear motor. Rantai mesin
akan berjalan membawa cetakan hingga tercelup pada tank lateks. Level pada tank
tersebut harus dapat dikontrol pada ketinggian tertentu agar permukaan cetakan
dapat tercelup pada lateks dengan rata. Blok diagram pengaturan level pada tank
lateks dapat dilihat pada gambar 4.4
+ -
Controller Aktuator Proses
Proximity
Output Input
Gambar 4.4 Blok diagram pengaturan level
Pengaturan level lateks dikontrol dengan menggunakan sistem pneumatik.
Sensor yang terdapat pada sistem tersebut mengunakan sensor
kedekatan/proximity, yang akan mendeteksi level pada tank lateks. Sensor atau
elemen pengukur adalah alat yang mengubah variabel keluaran menjadi variabel
yang sesuai, yang dapat digunakan untuk membandingkan keluaran dengan sinyak
rendah dan memperkuatnya menjadi tingkat yang tingginya mencukupi dan
kadang-kadang dengan diferensiasi atau integrasi untuk menghasilkan sinyal
kontrol yang lebih baik. Aktuator adalah alat daya yang menghasilkan masukan ke
bagian proses sesuai dengan sinyal kontrol sedemikian sehingga sinyal umpan
balik akan berkaitan dengan sinyal masukan acuan. Keluaran dari kontroler
otomatis dimasukkan ke aktuator, seperti katup pneumatik.
4.3. Pengoperasian Sistem Dalam Pengaturan Level Pada Tangki Lateks
Alasan utama menggunakan instrument pneumatic dalam pengaturan level
ini adalah karena fluida yang digunakan merupakan cairan lateks, yang
mempunyai tingkat kekentalan yang berbeda dari jenis cairan lainnya.
Kebanyakan instrument yang digunakan dalam sistem tersebut menggunakan type
Festo Pneumatic. Sistem ini dipasang pada areal glove plant khususnya pada
stripping area sebagai tempat proses pencetakan sarung tangan.
Proses pengaturan level pada tangki lateks ini, sensor tidak dihubungkan
langsung pada permukaan cairan namun diletakkan diatas tangki. Sensor akan
bekerja ketika sebuah float yang diletakkan diatas cairan yang dihubungkan pada
sebuah kabel memberikan respon tentang keadaan level cairan tersebut. Float
tersebut akan bekerja pada saat level lateks telah mengalami perubahan, yang
akan menggerakkan kabel naik dan turun. Pada gambar 4.5 dapat dilihat proses
1
Gambar 4.5 Proses kerja sensor dalam mendeteksi level
Jarak dari kedua ujung sensor pada kabel tersebut 5 mm, ini dibuat agar sensor
tidak terlalu cepat untuk melakukan kontak/respon. Kemudian sinyal akan
dikirimkan kebagian kontroller yang bekerja secara Normally Open maupun
Normally Close, yang selanjutnya aktuator akan bekerja setelah menerima sinyal
dari kontroller tekanan yang diperoleh actuator sebesar 6 -10 bar dan akan
menggerakkan sebuah cylinder yang berdiameter 32 mm, yang berfungsi untuk
menutup maupun membuka saluran fluida lateks.
4.4. Aktuator sebagai Elemen Pengendali Akhir
Elemen pengendali akhir merupakan bagian sistem pengendali yang
melaksanakan tindakan yang diperintahkan oleh kontroler. Elemen pengendali
akhir yang digunakan pada sistem adalah aktuator pneumatik. Aktuator pneumatik
adalah kerangan yang dioperasikan oleh udara yang bertekanan 6- 10 bar untuk
mengatur laju alir cairan lateks. Aktuator pneumatik berupa valve yang
menghalangi laju alir cairan yang melalui suatu orifice. Valve tersebut terdapat
Perubahan tekanan di atas diafragma akan meyebabkan batang naik turun,
sehingga mengubah laju alir cairan yang melalui orifice.
Gambar 4.6. Susunan dari sebuah aktuator
Gaya piston yang dihasilkan oleh silinder bergantung pada tekanan udara,
diameter silinder, dan tahan gesekan dari komponen perapat. Gaya piston secara
teoritis dihitung menurut rumus berikut :
Fth = A x P
Fth = Gaya piston teoritis (N)
A = Luas piston yang dipakai (m2)
P = Tekanan kerja (Pa)
Langkah silinder pneumatic tidak boleh lebih dari 2 m, untuk silinder rodless
jangan lebih dari 10 m. Dengan akibat langkah yang panjang, tekanan mekanik
batang piston dan bantalan menjadi terlalu besar. Untuk menghindari bahaya
tekanan, diameter batang piston pada langkah yang panjang harus sedikit lebih
besar.
Kecepatan silinder pneumatic bergantung pada beban, tekanan udara yang ada,
juga jumlah aliran udara yang melalui elemen control terakhir. Kecepatan piston
rata-rata dari silinder standard berkisar antara 0,1 sampai 1,5 m/s. Silinder khusus
dapat mencapai kecepatan sampai 10 m/s. Kecepatan piston ini dapat diatur
dengan katup pengontrol aliran satu arah dan dapat ditingkatkan dengan katup
pembuangan cepat.
4.5. Perawatan dan Pencegahan dalam Sistem Pneumatik
Sistem pneumatik yang baru dirancang (dibuat) dan dipasang akan berjalan
bebas dari kesalahan untuk beberapa lama. Keausan yang terlalu dini tidak nyata
sampai beberapa minggu atau bulan. Kesalahan akibat dari keausan tidak dapat
dilihat secara nyata, maka hasilnya tidak mudah untuk mengindetifikasi
komponen yang rusak. Kegagalan yang diuraikan disini yang sering terjadi adalah
sulit untuk dilokalisasikan dalam sistem pneumatik. Oleh karena itu, rangkaian
kontrol yang rumit dapat dibagi kedalam unit-unit yang kecil dan dapat diperiksa.
Keausan dan kerusakan komponen serta saluran dapat dipercepat oleh pengaruh
lingkungan, seperti :
Kualitas udara bertekanan
Gerakan relatif dari komponen Beban yang salah dari komponen
Perawatan yang salah
Pemasangan dan sambungan yang salah (misalnya, saluran sinyal yang
Untuk penyiapan udara dan untuk mengetahui biaya pengadaan energi, terlebih
dahulu harus diketahui konsumsi udara pada sistem. Pada tekanan kerja, diameter
piston, dan langkah tertentu, konsumsi udara dihitung :
Konsumsi udara = Perbandingan kompresi x luas bidang piston x panjang
langkah
Perbandingan kompresi = 1.031 + tekanan kerja (bar) 1.031
Perawatan yang paling intensif sekalipun, hanya sedikit berguna jika
sistem berasal dari perencanaan atau pemasangan yang salah. Itu membawa
gangguan yang dicirikan oleh keausan yang terlalu dini dan gangguan komponen.
Perencanaan yang hati-hati, dalam hal ini biayanya sedikit lebih banyak,dapat
mengurangi frekwensi gangguan dan kegagalan serta kerugian waktu. Usaha
pencegahan dapat dilakukan dengan :
Pemilihan komponen dan pembangkit sinyal yang tepat. Semuanya harus
sesuai dengan kondisi lingkungan dan kerja sistem.
Perlindungan komponen dalam mencegah pencemaran
Pengurangan beban dengan peredam kejut
Saluran diperpendek, dipasang penguat jika diperlukan.
Untuk mengontrol silinder dengan kecepatan tinggi atau diameter besar,
memerlukan volume udara yang besar, maka harus katup control dengan ukuran
yang besar pula. Gaya yang diperlukan untuk mengaktifkan katup yang relatif
besar, maka digunakan pengontrolan tak langsung. Elemen control mempunyai
diartikan sebagai pengontrolan tak langsung. Karena sinyal yang dihasilkan untuk
mengaktifkan katup kontrol tidak langsung mengoperasikan silinder, maka elemen
sinyal mempunyai ukuran fisik yang lebih kecil dan mempunyai waktu hubung
yang pendek.
4.6. Spesifikasi Alat
Sensor Proximity (kedekatan)/Inductive Sensor
Type : SIEN – M18B – PS – K – L
Mode : Positive – Switching (PNP) or Negative –
Switching (NPN)
Contact : Normally Open or Normally Closed
Connection : 3 – wire cable, 2,5 m
Supply Daya : 12 – 24 V DC
Sensing Distance : 5 mm
Frekwensi : 800 Hz
Aktuator
Type : Festo Pneumatic MFH 5 – 1/8
Pressure Range : 0 sampai 10 bar
Port Size : G 1/8
Configuration : 5/2 Valve
Cylinder ( Double Acting Cylinder)
47
Max. Pressure : 12 bar
Untuk mengetahui spesifikasi – spesifikasi dari instrument diatas dapat
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dalam penulisan Karya Akhir ini kesimpulan yang dapat diambil oleh
penulis ada beberapa hal yaitu :
Dalam proses pengaturan level lateks dalam tangki diperlukan sistem yang
dapat bekerja dengan baik, terutama pada elemen masukan seperti sensor
proximity dan juga proses aktuasi yaitu aktuator jenis pneumatik yang
memerlukan tekanan sebesar 6 bar, yang akan menggerakkan batang silinder yang
berdiameter 32 mm untuk menutup maupun membuka saluran fluida lateks.
5.2. Saran
Adapun saran yang dapat diberikan dalam penulisan karya akhir ini adalah:
Untuk mencegah adanya kesalahan/gangguan-gangguan dalam sistem
diperlukan adanya pengawasan secara berkala oleh seorang operator agar
pengaturan level lateks dalam tangki dapat berjalan dengan baik dan pemilihan
komponen yang tepat, semuanya harus sesuai dengan kondisi lingkungan dan
49
DAFTAR PUSTAKA
Croser, P. 1994. Pneumatik, Tingkat Dasar P. III. Festo Didactic
Parr, Andrew. 2003. Edisi Kedua, Hidrolika dan Pneumatik. Penerbit Erlangga
Stewart, Harry L. 1978.Hydraulic and Pneumatic Power for Production. Industrial Press
Krist, Thomas. 1993. Dasar-Dasar Pneumatik. Pnerbit Erlangga: Jakarta